Embed Size (px)
DESCRIPTION
servo
Citation preview
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 1/102
Sichuan Electric Co., Ltd. Shenzhen Sony
Shenzhen Xinlichuan Control Co., Ltd
Página 2
Página 3Chuan vigor servo servo serie B2 Instrucciones
- 1 -
CONTENIDOS
Capí tulo 1 Instalación .............................................. .................................................. ..........................
- 1 -
Instalación 1.1 servo unidad de
accionamiento ............................................ .................................................. ..........................- 1--
1.1.1 Entorno de
instalación ............................................. .................................................. .........................................- 1--
1.1.2
Instalación ............................................. .................................................. .........................................- 1--
1.1.3 dimensiones de la unidad
servo ........................................... .................................................. ..........................- 2 -
1.2 instalación
servomotor ............................................. .................................................. .................................- 2 -
1.2.1 Entorno de
instalación ............................................. .................................................. .........................................- 2 -
1.2.2
Instalación ............................................. .................................................. .........................................- 2 -Capí tulo cableado II .............................................. .................................................. ..........................
--3--
2.1 cableado del circuito
principal ............................................. .................................................. .........................................- 3 -
2.1.1 Circuito principal
Terminal ........................................... .................................................. ..............................- 3 -
2.1.2 principales terminales de alimentación del circuito de suministro (primavera)
utilizan ..................................... .................................................. .....- 3 -
2.1.3 cableado del circuito
principal ............................................ .................................................. ......................................- 4 -2.2 CN3 cableado terminal de
control ............................................ .................................................. ............................- 5 -
Modo Posición 2.2.1 diagrama de cableado
estándar .......................................... .................................................. .......................- 5 -
Cableado estándar / modo de par 2.2.2
Velocidad ........................................ .................................................. ...............- 6 -
2.2.3 CN3 Terminal
Definición ............................................ .................................................. ................................- 7--
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 2/102
2.2.4 circuito de interfaz
CN3 ............................................ .................................................. ................................- 8 -
2.2.5 terminales de señal de encoder
CN4 .......................................... .................................................. ....................- 11-
2.2.6 CN2 terminales portuarias
comunicaciones ........................................... .................................................. ...........................- 11-
Capí tulo visualización y funcionamiento III ............................................ ..................................................
.............--12--
Cada parte del nombre ............................................. 3.1
Panel .................................................. ...............................- 12--
Proceso de fijación de 3,2
parámetro ............................................. .................................................. ...................................- 12--
Pantalla de estado 3.3
Memoria .............................................. .................................................. ..................................- 13--
3.4 Falla y visualización de
alarma ............................................. .................................................. ...............................- 13--
Capí tulo Cuatro Parámetro
Descripción ............................................. .................................................. ................
--14--
4.1 parámetro
define ............................................... .................................................. ..........................................- 14--
4.2 Descripción del
parámetro ............................................... .................................................. ..........................................-
15--
4.2.1 Parámetros de
control ............................................. .................................................. .........................................- 15--4.2.2 Parámetros
básicos ............................................. .................................................. .........................................- 16--
4.2.3 parámetros de control de posición
interna ........................................... .................................................. ..........................- 18 -
4.2.4 parámetros de control de velocidad
internas ........................................... .................................................. ..........................- 20--
4.2.5 Parámetros de control de
par ........................................... .................................................. ..................................- 21 -
4.2.6 parámetros de
ajuste ............................................. .................................................. .........................................- 21 -
Página 4
Chuan vigor servo servo serie B2 Instrucciones
--2--
4.2.7 Parámetros de
comunicación ............................................. .................................................. .........................................-
23 -
4.2.8 parámetros
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 3/102
auxiliares ............................................. .................................................. .........................................- 23 -
4.2.9 parámetros de ajuste de entrada /
salida ......................................... .................................................. ........................- 24--
4.2.10 La entrada digital (DI) de definición de la función .......................................
mesa .................................................. ...........- 25 -
4.2.11 salida digital (DO) definición de la función de
mesa ....................................... .................................................. ........- 26 -
CAPÍTULO V plazo de energí a ............................................. .................................................. ................--27--
5.1 Puesta ............................................... .................................................. ..............................................-
27 -
5.1.1 prueba de funcionamiento antes de
comprobar .......................................... .................................................. ...............................- 27 -
5.2 Modo de control de
posición .............................................. .................................................. ..................................- 28 -
5.2.1 Modo Posición
externa ............................................ .................................................. .................................- 28 -
5.2.2 caracterí sticas múltiples ubicaciones
internas ........................................... .................................................. ..........................- 30--
5.3 Modo de control de
velocidad .............................................. .................................................. ..................................- 31 -
5.3.1 modo de velocidad
externa ............................................ .................................................. .................................- 31 -
5.3.2 función de varias velocidades
Interna ........................................... .................................................. ..............................- 32--
5.4 modo de control de
par ............................................. .................................................. ...................................- 33 -5.5 Modo de Control
Mixta .............................................. .................................................. ..................................- 34 -
5.5.1 Velocidad / posición de modo de
conmutación .......................................... .................................................. .........................- 34 -
Conmutada / velocidad de par
5.5.2 ......................................... .................................................. ..........................- 34 -
Modo de conmutación 5.5.3 Posición /
par ......................................... .................................................. ..........................- 35 -
5.6 Otros
ajustes ............................................... .................................................. ..........................................- 35 -5.6.1 El uso de los frenos electromagnéticos ........................................... ..................................................
..............................- 35 -
Capí tulo 6 de sintonización de
parámetros ............................................. .................................................. ................
--36--
6.1 Posición ganancia del bucle de
sintonización ............................................. .................................................. ...............................- 36 -
6.2 Velocidad de sintoní a ganancia de lazo ............................................. ..................................................
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 4/102
...............................- 36 -
Capí tulo VII de la diagnosis y el tratamiento de
anomalí as ........................................... .................................................. ......
--37--
7.1 Lista de aviso de
fallo .............................................. .................................................. ..............................- 37 -
7.2 El incumplimiento Causa y medidas de
tratamiento ............................................ .................................................. ........................- 38 -Capí tulo leyenda Comunicación
VIII ............................................. .................................................. ................
--40--
8.1 Alcance ............................................... .................................................. ..........................................-
40 -
............................................... Formato 8.2
protocolo .................................................. ..........................................- 40 -
8.3 Protocolo Formato
Descripción .............................................. .................................................. ..................................- 42 -
Página 5
Chuan vigor servo servo serie B2 Instrucciones
- 1 -
Capí tulo 1 Instalación
Advertencia
● almacenamiento de producto y la instalación deben cumplir con las condiciones ambientales.
● dañado o partes del producto faltante no puede instalar y utilizar.
● Instale los productos materiales a prueba de fuego requeridas, no se puede instalar en o cerca de
combustible y evitar incendios.● La unidad servo unidad debe estar instalado en el armario eléctrico para evitar que el polvo, gases
corrosivos, objetos conductores, lí quidos y sustancias inflamables entren.
● servodrive y servomotor deben evitar vibraciones, prohí ben resistir el impacto.
● No arrastre los alambres y codificador lí neas servo motor.
1.1
Instale la unidad servo drive
Billete
● La unidad servo unidad debe instalarse en un armario eléctrico de protección.
● La unidad servo unidad debe instalarse en la direcció
n y el espaciamiento especificado, y paragarantizar una buena disipación del calor.
● No instale en o cerca de objetos inflamables, para evitar incendios.
Medio Ambiente 1.1.1 Instalación
(1) Use la temperatura / humedad: 055 (sin heladas congelación), el 90% de humedad relativa o℃
menos (sin condensación).
(2) Temperatura de almacenamiento / Humedad: -2065 (sin heladas congelación), el 90% de℃
humedad relativa o menos (sin condensación).
(3) la atmósfera: armario eléctrico, gas inflamable ni corrosivo, la neblina de aceite, polvo y similares.
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 5/102
(4) la elevación: 1000m sobre el nivel del mar o menos.
(5) Vibración: menos de 0,5 G (4.9m / s
2
), 1.060 Hz (funcionamiento no continuo).
(6) Protección: servo misma unidad sin protector debe ser instalado en un buen armario eléctrico de
protección y evitar la corrosión,
Los gases inflamables, objetos conductores, polvo de metal, neblina de aceite y lí quidos de intrusión.
Método 1.1.2 Instalación
(1) en dirección de la instalación: servoaccionamientos de la compañí a para la estructura vertical, por
favor instalarse verticalmente. Instalado perpendicular a la cara de montaje.
(2) los intervalos de instalación:
Intervalo de instalación de la unidad de servo único coche
Intervalo de instalación de la unidad servo múltiple
Página 6
Chuan vigor servo servo serie B2 Instrucciones
--2--1.1.3 dimensiones de la unidad servo
1.2
La instalación del motor servo
Advertencia
● No golpee el eje del motor, puede causar daños en el encoder del motor.
Medio Ambiente 1.2.1 Instalación
(1) Use la temperatura / humedad: 540 (sin heladas congelación), el 90% de humedad relativa o℃
menos (sin condensación).
(2) Temperatura de almacenamiento / Humedad: -2055 (sin heladas congelación), el 80% de℃humedad relativa o menos (sin condensación).
(3) Medio ambiente atmosf érica: Interior (sin exposición), no corrosivo, gas inflamable, la neblina de
aceite, polvo y similares.
(4) la elevación: 1000m sobre el nivel del mar o menos.
(5) Vibración: menos de 0,5 G (4.9m / s
2
), 1.060 Hz (funcionamiento no continuo).
(6) Clase de protección: IP54
Método 1.2.2 Instalación
(1) dirección de montaje: Para evitar el agua, el aceite, el lí quido fluya hacia el extremo de salida del
motor en el interior del motor, la salida del cable se coloca a continuación. Si el caballo
Instalación del eje hacia arriba y cuando una caja de engranajes, la necesidad de evitar que el aceite de
engranaje de reducción del eje del motor para penetrar en el interior del motor.
(2) Cuidado: Cuando se conecta a la máquina, el uso de acoplamiento, y el eje del servo motor y el eje
mecánico mantiene recta en un
Online.
(3) Cable: No cometa el cable de "doblar" o su carga "tensión" Así que cuando el cableado (uso), por
favor no haga la tensión del cable sobre
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 6/102
Estrecha.
2
0
2
1
6
2
17
2
167
44
3
5
×Φ
Página 7Chuan vigor servo servo serie B2 Instrucciones
--3--
Capí tulo II Cableado
Advertencia
● Esta serie de alimentación de la unidad a la de tres fases de alimentación 220V, la unidad debe ser
identificado con el cableado de alimentación.
● Los usuarios deben tener en cuenta las medidas de seguridad en el diseño y montaje de la hora
cuando utilice este producto para evitar accidentes causados por un manejo incorrecto
Accidente.
● terminales del convertidor U, V, W y el motor debe ser U, V, W correspondencia.● unidad y el motor deben estar conectados a tierra.
● Antes de desmontar la unidad, debe apagar durante más de cinco minutos.
● No poder no frecuente de encendido / apagado, realmente necesitan repetidamente interruptor de
voltaje, por favor, controlar en 1 minuto 1 segundo o menos.
● Cuando se utiliza la resistencia de frenado interna, cortocircuito deben conectarse entre las terminales
+ C y CC, prohibir piezas de alambre conectados directamente a D,
DC habitaciones +.
2.1 cableado del circuito principal
2.1.1 El nombre de los terminales del circuito principal
Marcos
Nombre
Explicación
R, S, T
Terminales de entrada de alimentación del circuito principal
Conexión monof ásica trif ásica de alimentación / AC (dependiendo del modelo del producto, seleccione
la regulación de la tensión adecuada
Cuadrí cula, monof ásica 220V sólo puede tener R y S)
R, S
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 7/102
Terminales de entrada de alimentación de prueba
Utilice la prueba de potencia, el uso normal no está conectado
DC +, D, C
Terminal de la resistencia regenerativa
Cuando se utiliza resistencia regenerativa interna, C / DC + entre en cortocircuito (f ábrica de
enchufado), cuando el
Externo
Cuando la resistencia regenerativa, C / DC + apagado, la resistencia de frenado conectadaD / DC entre +. Resistencia regenerativa externa debe adquirirse por separado.
U, V, W
Lí nea de conexión del motor
Conectado con el motor.
PE
Terminal de tierra (dos)
Conecte el terminal de tierra de la fuente de alimentación y el terminal de tierra del motor a tierra a la
manipulación.
2.1.2 principales terminales de alimentación del circuito de suministro (primavera) Uso
Tamaños de los cables se pueden utilizar :: (1) 0.5φ tamaño del cable singlete ~ 1.6mm.φ
(2) Conexiones:
1. El terminal debe ser retirado de la unidad de servo antes de cableado, si no hay terminales de
conexión directa desmontaje, seráPuede causar daños a la unidad de servo.
2, el cable pelado la piel para exponer el alambre de cobre desnudo 8 ~ 9 mm.
3. Abra el terminal del cable en la ranura, inserte el cable en el terminal y suelte la palanca cuando el
terminal está cerrado o un destornillador.
En la siguiente manera:
● servoaccionamientos de apoyo de la palanca de control para forzar la apertura de la ranura (como semuestra en la Figura A) por debajo;
● un "menos" destornillador insertado en una abertura en los terminales (Terminal de anchura 3,0 ~ 3,5
mm) y presione firmemente
Siguiente para abrir la ranura (como se muestra en la Figura B)
Página 8
Chuan vigor servo servo serie B2 Instrucciones
--4--
Figura A
Figura B
2.1.3 cableado del circuito principal
1, cableado de alimentación monof ásica:
2, cableado de alimentación de tres fases:
Nota:
1, cuando se utiliza la resistencia de frenado interna cortocircuito C y DC + (la f ábrica ha sido
conectado), de desconexión cuando se utiliza una resistencia de frenado C y externa DC +,
La resistencia de frenado externa conectada entre D y DC +.
2, R, S terminales para la terminal de prueba, cuando el usuario no requiere la conexión eléctrica.
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 8/102
Página 9
Chuan vigor servo servo serie B2 Instrucciones
--5--
2.2 cableado terminal de control CN3
Modo Posición 2.2.1 diagrama de cableado estándar
Página 10
Chuan vigor servo servo serie B2 Instrucciones
--6--
2.2.2 Velocidad / Par Modo Diagrama de cableado estándar
Página 11
Chuan vigor servo servo serie B2 Instrucciones
- 7 -
115
31
44
1
15
31
44
2.2.3 CN3 Terminal Definición
Fachada de la Terminal
Terminales posteriores CableadoNombre de la señal
Nº de pin
Función por defecto
Función
Entrada digital
Puerto
ED1
5
1
Servo permitiráPor
El trabajo en grupo Pr6
Parámetros de energí a Reglamento
Planifique cada salida
Caracterí sticas
ED2
22
2
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 9/102
Señal de reset de alarma
ED3
6
3
Control de posición del contador de desviación del pulso clara
DI4
23
4Velocidad selección dirección de comandos
ED5
7
5
CMD0 instrucción interna
ED6
24
6
CMD comando interno 1
DI7
8
7
Comando CMD Interna 2
ED8
25
8
CMD comando interno 3
DI9
99
Desencadenantes de instrucciones internas
ED10
26
10
Cambio de modo de control
Salida Digital
Puerto
DO1
271
Servo listo
Por
El trabajo en grupo Pr6
Parámetros de energí a Reglamento
Planifique cada salida
Caracterí sticas
DO2
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 10/102
10
2
Señal de salida de frenos
DO3
28
3
La rotación de la señal de salida del motor
DO411
4
Señal de velocidad cero
OC5
42
5
Enví o cercanos
DO6
12
6
Alcance velocidad
Comando de posición
PULSO
4
Ordene pulso de entrada: Conductor / colector abierto diferencial
Modo de entrada: Pulso + dirección / A, B Fase en Cuadratura
/ PULSE
2
SIGN3
/ SIGNO
1
Entrada analógica
Puerto
EA1
16
Señal de entrada analógica, el rango de entrada de 0 ~ 10V
AI2
17Señal de entrada analógica, el rango de entrada de 0 ~ 10V
AI3 +
18
Señal de entrada analógica, el rango de entrada de 10V ~ 10V
AI3-
19
GNDA
20, planta de entrada analógica 21
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 11/102
Salida Encoder
Señal
PA +
44
Encoder Una señal de salida de fase (diferencial)
PA-
43
PB +29
Señal de salida de fase Encoder B (diferencial)
PB
30
PZ +
15
Señal de salida de fase Z del encoder (diferencial)
PZ-
14
Fuente de alimentación
+ 24V
13
Fuente de alimentación interna de 24 V para uso externo (y COM)
COM
31,32
Página 12
2.2.4 circuito de interfaz CN3
1, el circuito de entrada digitalEsta serie servoaccionamientos proporcionan un total de diez carreteras
Planificación, principio de funcionamiento se muestra a continuación:
Diagrama de cableado del terminal de control externo
2, circuito de salida digital
Esta serie servoaccionamientos proporcionan un total de seis posiciones
Disponible para la planificación, se muestra a principio de funcionamiento:
(1) PC con el diagrama de cableado de entrada de relé:
(2) cuando el diagrama de cableado de entrada optoacoplador equipo host:
Nota: Cuando una fuente de alimentación externa es de 24 V, el pull-up resistor R = 10K
Chuan vigor servo B2
Para un total de diez carreteras terminal de DI para los usuarios, cada uno de los cuales cuenta con un
puerto DI
Diagrama de cableado de control PLC
HACER terminales para los usuarios de la carretera, cada una de las cuales
Diagrama de cableado de entrada:
Entrada de relé de PC
Pops diagrama de cableado:
PC para la entrada de optoacoplador
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 12/102
R = 10K, cuando la fuente de alimentación externa es de 5V, el pull-up resistor R = 2K
La serie B2 servo Instrucciones
--8--
Puerto funcional puede ser
Funciones portuarias O son
R = 2K.
Página 13
Chuan vigor servo servo serie B2 Instrucciones
--9--
3, el circuito de entrada analógica
Esta serie servoaccionamientos proporcionan dos entradas analógicas
El rango es de 0 ~ 10V; oscila entrada analógica bipolar:
AI3 canal de entrada analógica es bipolar. Principio de funcionamiento
(1) Circuito de entrada analógica unipolar
(2) Circuito de entrada analógica bipolar
4, el circuito de entrada de comandos de posiciónEste servo serie impulsa con el comando de pulsos de entrada
Abra la señal de salida del circuito de dos polos. Diagrama de cableado especí fico de la siguiente
manera
(1) NPN cableado tipo colector abierto
Proporciona dos circuitos de entrada analógica: unipolar y bipolar. Entrada analógica unipolar
Del rango de entrada analógica: -10 ~ 10V. En el que los canales analógicos AI1
Principio de funcionamiento es el siguiente:
Circuito de entrada
Circuito de entrada
0V ~ 10V
10V ~ 10V
Tener un terminal de entrada de comandos de pulso que puede recibir mayores medios de
accionamiento diferencial
. Cableado especí fico, como se muestra a continuación:
Open-cableado
Polaridad. Voltaje de entrada analógica unipolar
AI1 y AI2 es unipolar,
Dispositivo de la etapa de salida del controlador diferencial y el colector
Página 14
Chuan vigor servo servo serie B2 Instrucciones
--10--
(2) PNP cableado tipo colector abierto
(2) el cableado de salida del controlador diferencial
5, el circuito de salida de señal de encoder
Esta señal de realimentación servo serie impulsa la salida del codificador a través de la señal de salida
del controlador diferencial diferencial de mención PC
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 13/102
Para señal de realimentación, que constituye el control de lazo cerrado de posición, el PC necesita
adoptar un receptor diferencial circuito recibe. Principio de funcionamiento es el siguiente:
Página 15
Chuan vigor servo servo serie B2 Instrucciones
--11--
15
11
15
1
5
11
15
2.3 terminales de señal de encoder CN4
Terminales de encoder positivo
Terminales posteriores cableado del codificadorPin
Marcos
Contenidos
Pin
Marcos
Contenidos
12
PGA +
La
4PGV +
V
6
PGA-
/ A
10
PGV-
/ V
1
PGB +
B
14
PGW +
W
7
PGB-
/ B
15
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 14/102
PGW-
/ W
2
PGZ +
Z
11
+ 5V
DC5V8
PGZ-
/ Z
5
GND
0V
3
PGU +
U
13
PE
Suelo
9
PGU-
/ U
2.4 CN2 terminales portuarias comunicaciones
Este servo serie impulsa Comunicación terminales portuarias CN2 proporciona RS232, RS485 dos
conjuntos de interfaces, pero no se puede utilizar con
El usuario puede modificar, monitoreo y otras operaciones en el servo de velocidad conducirparámetros internos a través de la pantalla táctil, PLC, PC, etc. Diagrama Pin sigue
Muestra:
Diagrama de pines Terminal positivo
Pin
Definiciones
Pin
Definiciones
1
RXD
2GND
4
TXD
3
5
485+
6
8
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 15/102
485-
7
Página 16
Chuan vigor servo servo serie B2 Instrucciones
--12--
Capí tulo III de visualizaci
ón y operaci
ónCada parte del nombre 3.1 Panel
Parte
Nombre
Función
Tubos para visualizar digitales
Controlar
Cinco conjuntos de LED valor monitor digital, el valor del parámetro y el tubo de consigna para la
exhibición.
MODO
Tecla MODEModo de Inter-grupo o fuera para entrar en el modo de grupo / modo interno y ajuste de parámetros.
Tecla Mayús
Modo de ajuste se puede utilizar para corregir el carácter intermitente ajuste la izquierda valores de
carácter superior,
Cuando se muestran los parámetros de más de cinco LED de control digital, el cambio de pantalla de
alta y baja poco
Tecla UP
Cambiar códigos monitor, número de grupo, códigos de parámetros o consigna.
DOWN para cambiar los códigos de monitor, número de grupo, códigos de parámetros o consigna.
SETTecla SET
Mostrar y almacenar el valor ajustado, entre al modo intergrupal y el modo de ajuste de parámetros.
Proceso de fijación de 3,2 parámetro
(1) impulsa la alimentación se activa, el panel muestra el valor por defecto conducir un segundo código
de monitor, después de entrar en el modo de visualización del monitor.
(2) En el modo monitor, pulsando el botón ARRIBA o ABAJO para cambiar el código del parámetro
monitor, a continuación, pulse el botón SET para entrar en los parámetros de monitoreo digitales
Pantalla de control, sin golpes de teclado, un minuto después de introducir el código de parámetro
automáticamente monitorear pantalla.
Cuando (3) modo de supervisión, monitorización de parámetros para el número de 32 bits, o el valor de
la pantalla es mayor que el valor del número binario 5, pulse la tecla SHIFT,
Alta y baja interruptor de la pantalla poco, cuando la alta pantalla, el punto más alto en el dí gito de las
luces LED.
(4) En el modo de monitor, pulse la tecla MODE para entrar en el modo de grupo entre los parámetros,
a continuación, pulse las teclas ARRIBA / ABAJO para cambiar el código del grupo,
Pulse MODE parámetros clave del modo de inter-grupo y volver al modo monitor.
(5) Entre el modo de grupo de parámetros, pulse el botón SET para entrar en el modo de grupo de
parámetros, pulse la tecla MODO para salir del parámetro dentro del modo de grupo
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 16/102
Volver al grupo entre los modos. Pulse la tecla SHIFT, carácter intermitente a la izquierda, puede
agrupar dentro de un número de grupo y un alto modificación, seleccione el deseado
Parámetros.
(6) En virtud de los parámetros en el modo de grupo, pulse SET para entrar en el modo de ajuste de
parámetros y muestra el valor inmediato del ajuste de parámetros, pulse ARRIBA o
DOWN para cambiar códigos de parámetros después de dos valores de código.
(7) En el modo de ajuste, pulse la tecla SHIFT mientras parpadeo carácter a la izquierda, y luego utilice
ARRIBA / ABAJO ser personajes de los parámetros más altos de bitsAjustes.
(8) Una vez finalizada la modificación de consigna, pulse el botón SET para almacenar o ejecutar unos
valores de los parámetros del sistema.
(9) Después de completar los ajustes de parámetros, la pantalla mostrará el correspondiente código de
sí mbolo del sistema, tales como mostrar "-Fin-", y automáticamente volver al Senado
Dentro de un modo de grupo pocos.
(10) En el modo de ajuste, pulse la tecla MODE o ninguna operación de tecla en un minuto renunciará a modificar el valor de ajuste de parámetros y retorno
Página 17
Chuan vigor servo servo serie B2 Instrucciones
--13--
Parámetros del modelo dentro de un grupo. En otro modo, no más de un minuto de las mismas
pulsaciones de teclas de nuevo al modo de monitorización. El diagrama de flujo especí fico como
Página siguiente figura.
Pantalla de estado 3.3 Memoria
Después de pulsar el modo de ajuste de parámetros SET Pantalla de estado clave
Sí mbolos de la pantalla
Descripción-Fin-
Ajuste final correcto almacenamiento
Po_on
Este parámetro será re-encendido para entrar en vigor
SrvOn
Parámetros servo no se pueden establecer
Err-r
Parámetro de sólo lectura, no se puede modificar
rESvd
Este parámetro se valores reservados no se puede modificar
3.4 Falla y visualización de la alarma
Ejemplo de visualización
Descripción
Er.0xx
Cuando falla de la unidad, informó la pantalla del panel de fallas muestran sí mbolo de culpa "Er.0"
Y el número de error "xx", rango de xx de 01 ~ FFH, a continuación, pulse la sección de operación de
los botones,
Usted puede ver otras imágenes, pero el punto decimal tubo digital más a la derecha LED habrí as
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 17/102
estado
Parpadea hasta que el fallo se borra cuando no hay fallo o alarma display "Er .---".
Er.Exx
Cuando el convertidor genera una alarma, la advertencia mensaje de la pantalla del panel, un sí mbolo
de alerta "Er.E"
Y el código de alarma "xx" y pulse el botón de operación se puede ver otras pinturas
Cara, pero el punto más bajo destellos decimales tubo digital poco hasta borra la alarma.
Página 18
Chuan vigor servo servo serie B2 Instrucciones
--14--
Capí tulo Cuatro Parámetro Descripción
4.1 Parámetro Definición
Las definiciones de los parámetros se dividen en las siguientes nueve grupos principales, el primer
argumento tras argumento para el número de grupo Pr código de inicio, seguido de dos
Parámetro es el número dentro del grupo. Discurso del grupo de parámetros número dentro de un grupo
de parámetros, grupos de parámetros se definen como sigue:Pr0.xx Grupos 0: parámetros de supervisión
Grupo Pr1.xx 1: Parámetros básicos
Pr2.xx Grupo 2: parámetro de control de posición interna
Grupo Pr3.xx 3: parámetros de control de velocidad interna
Pr4.xx Grupo 4: los parámetros de control de par
Pr5.xx Grupo 5: parámetros de ajuste
Pr6.xx Grupo 6: parámetros de ajuste de entrada / salida
Pr7.xx Grupo 7: parámetros de comunicación
Pr8.xx Grupo 8: parámetros de la función auxiliar
Preferencias Descripción del inmueble(○)
Establecer, en cualquier momento, con efecto inmediato
(●)
Establecer, en cualquier momento, volver a la energí a de la entrada en vigor
(□)
Deje de establecer, con efecto inmediato
(■)
Detener la creación, re-poder de la entrada en vigor
(▲)
Parámetro de sólo lectura, no se puede establecer el modo de control Descripción
El modo de control de posición P
El modo de control de velocidad S-
El modo de control del par T-
Página 19
Chuan vigor servo servo serie B2 Instrucciones
--15--
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 18/102
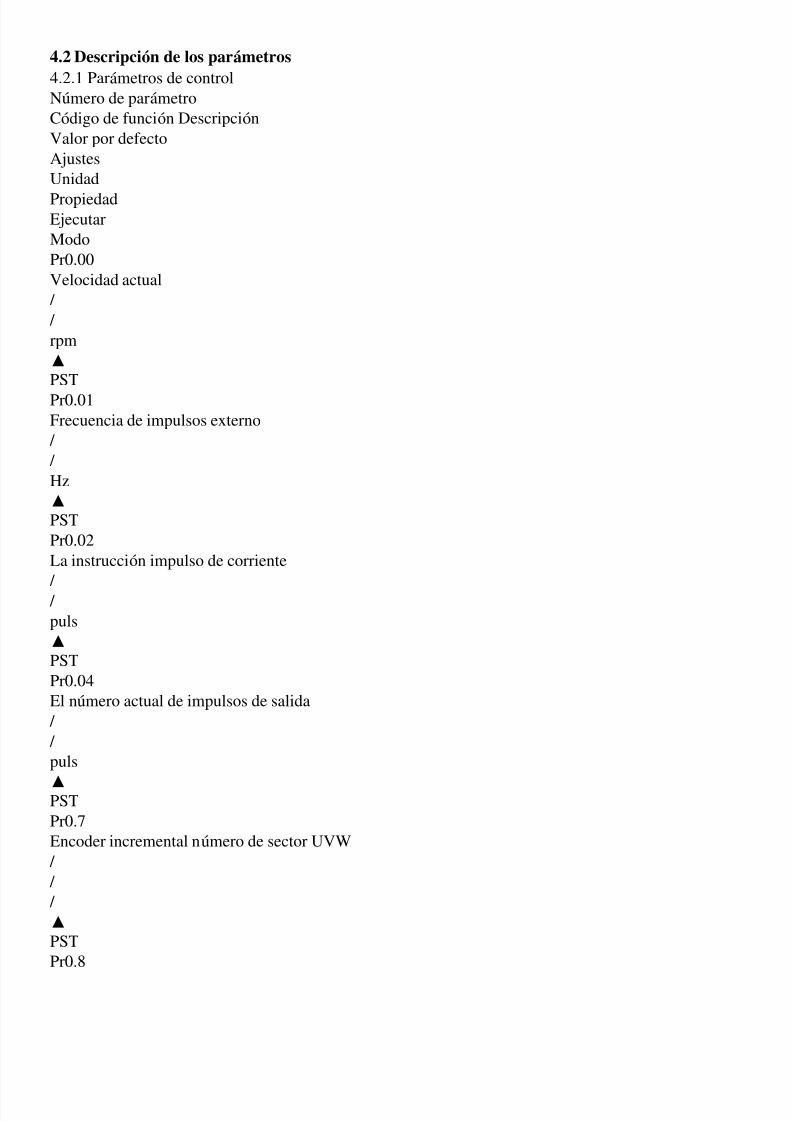
4.2 Descripción de los parámetros
4.2.1 Parámetros de control
Número de parámetro
Código de función Descripción
Valor por defecto
Ajustes
Unidad
PropiedadEjecutar
Modo
Pr0.00
Velocidad actual
/
/
rpm
▲PST
Pr0.01
Frecuencia de impulsos externo
/
/
Hz
▲PST
Pr0.02
La instrucción impulso de corriente
/ /
puls
▲
PST
Pr0.04
El número actual de impulsos de salida
/
/
puls
▲PST
Pr0.7
Encoder incremental número de sector UVW
/
/
/
▲
PST
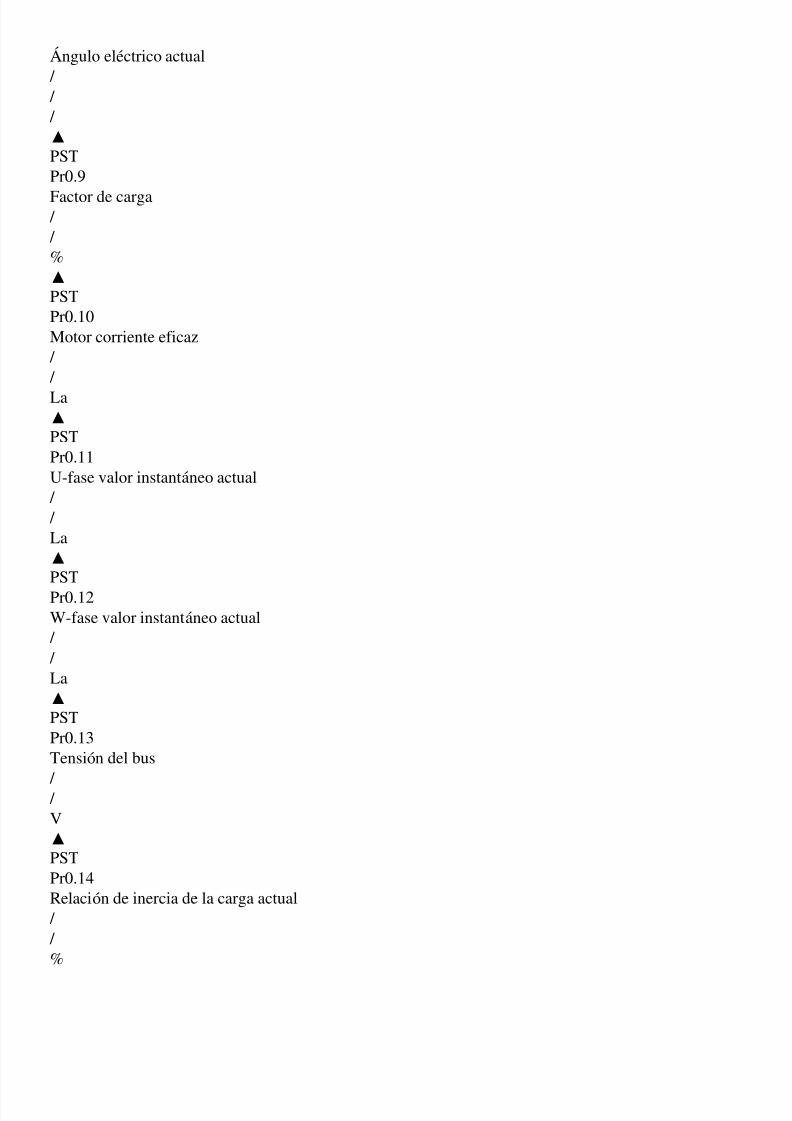
Pr0.8
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 19/102
Ángulo eléctrico actual
/
/
/
▲
PST
Pr0.9
Factor de carga /
/
%
▲
PST
Pr0.10
Motor corriente eficaz
/
/
La
▲PST
Pr0.11
U-fase valor instantáneo actual
/
/
La
▲PST
Pr0.12
W-fase valor instantáneo actual
/
/
La
▲PST
Pr0.13
Tensión del bus
/ /
V
▲PST
Pr0.14
Relación de inercia de la carga actual
/
/
%
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 20/102
▲
PST
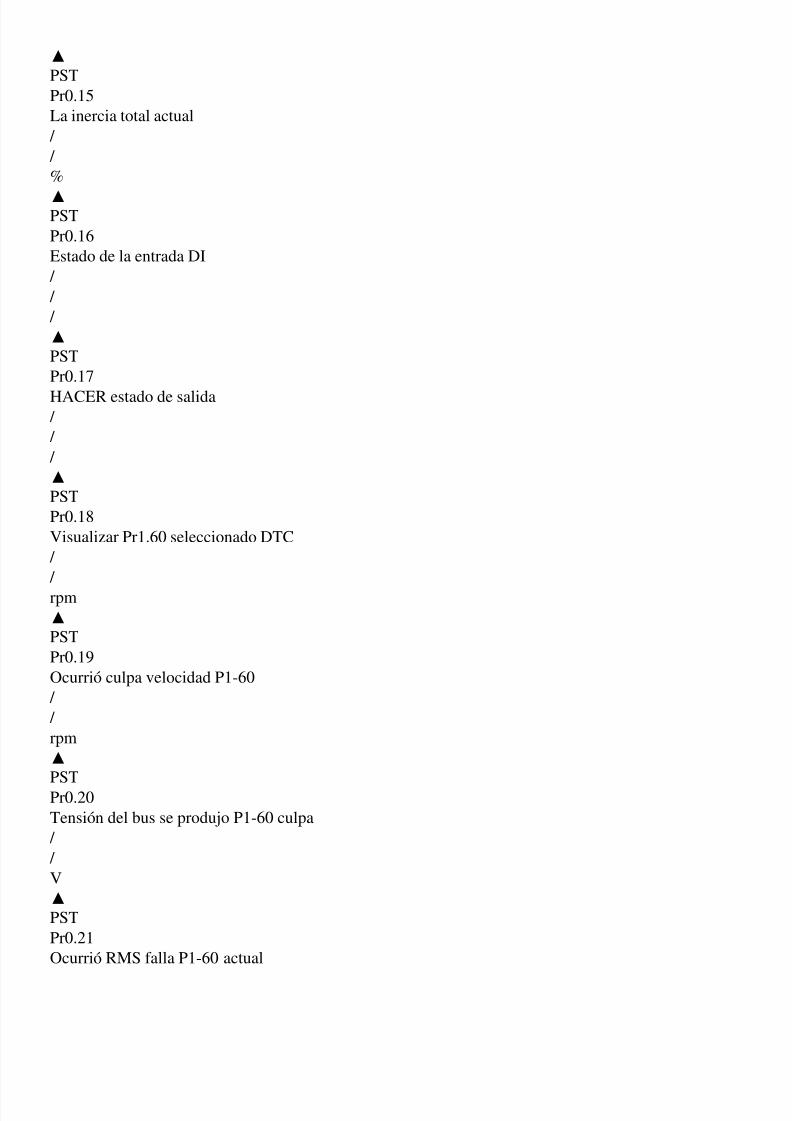
Pr0.15
La inercia total actual
/
/
%
▲PST
Pr0.16
Estado de la entrada DI
/
/
/
▲
PST
Pr0.17
HACER estado de salida /
/
/
▲
PST
Pr0.18
Visualizar Pr1.60 seleccionado DTC
/
/
rpm
▲PST
Pr0.19
Ocurrió culpa velocidad P1-60
/
/
rpm
▲
PSTPr0.20
Tensión del bus se produjo P1-60 culpa
/
/
V
▲
PST
Pr0.21
Ocurrió RMS falla P1-60 actual
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 21/102
/
/
La
▲
PST
Pr0.22
Ejecute momento en que se produjo el fallo
/ /
min
▲
PST
Pr0.23
El tiempo total de funcionamiento
/
/
min
▲PST
Pr0.27
EA1 Voltaje
/
/
mV
▲
PST
Pr0.28
AI2 Voltaje
/
/
mV
▲PST
Pr0.29
Tensión AI3
/
/ mV
▲PST
Página 20
Chuan vigor servo servo serie B2 Instrucciones
--16--
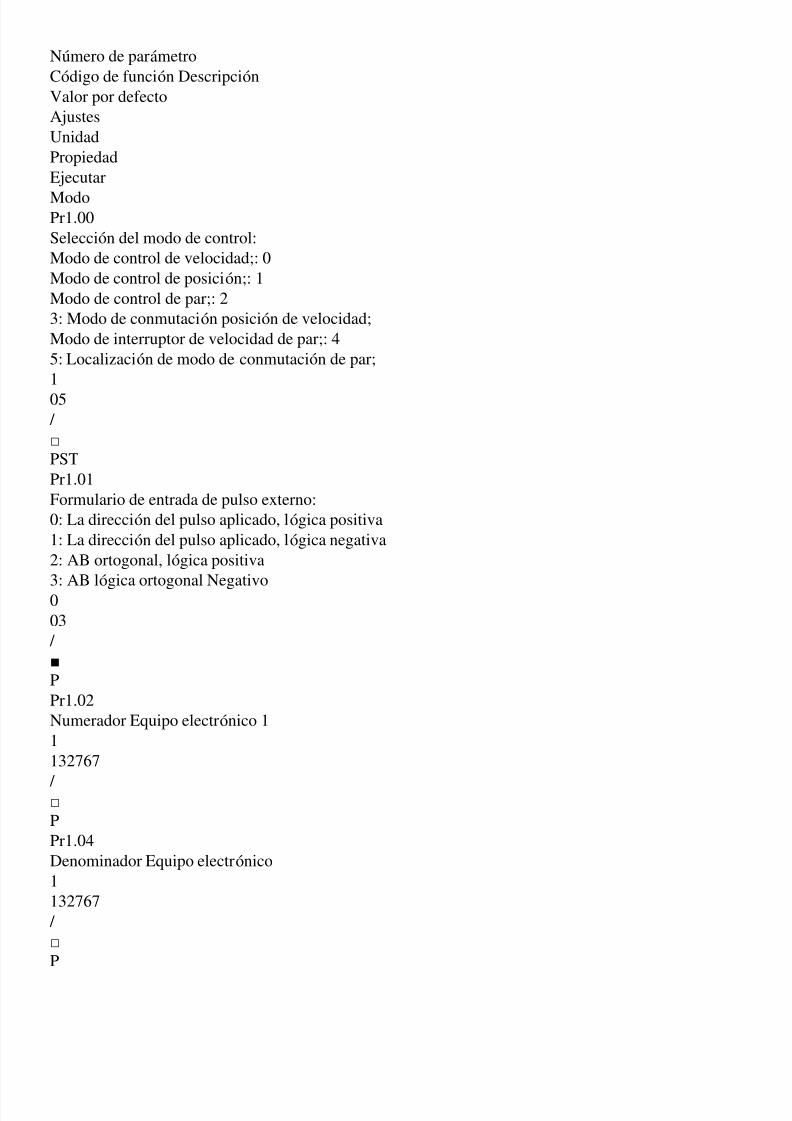
4.2.2 Parámetros básicos
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 22/102
Número de parámetro
Código de función Descripción
Valor por defecto
Ajustes
Unidad
Propiedad
Ejecutar
ModoPr1.00
Selección del modo de control:
Modo de control de velocidad;: 0
Modo de control de posición;: 1
Modo de control de par;: 2
3: Modo de conmutación posición de velocidad;
Modo de interruptor de velocidad de par;: 4
5: Localización de modo de conmutación de par;
1
05
/
□PST
Pr1.01
Formulario de entrada de pulso externo:
0: La dirección del pulso aplicado, lógica positiva
1: La dirección del pulso aplicado, lógica negativa
2: AB ortogonal, lógica positiva
3: AB lógica ortogonal Negativo
0
03
/
■
P
Pr1.02
Numerador Equipo electrónico 1
1
132767
/ □
P
Pr1.04
Denominador Equipo electrónico
1
132767
/
□
P
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 23/102
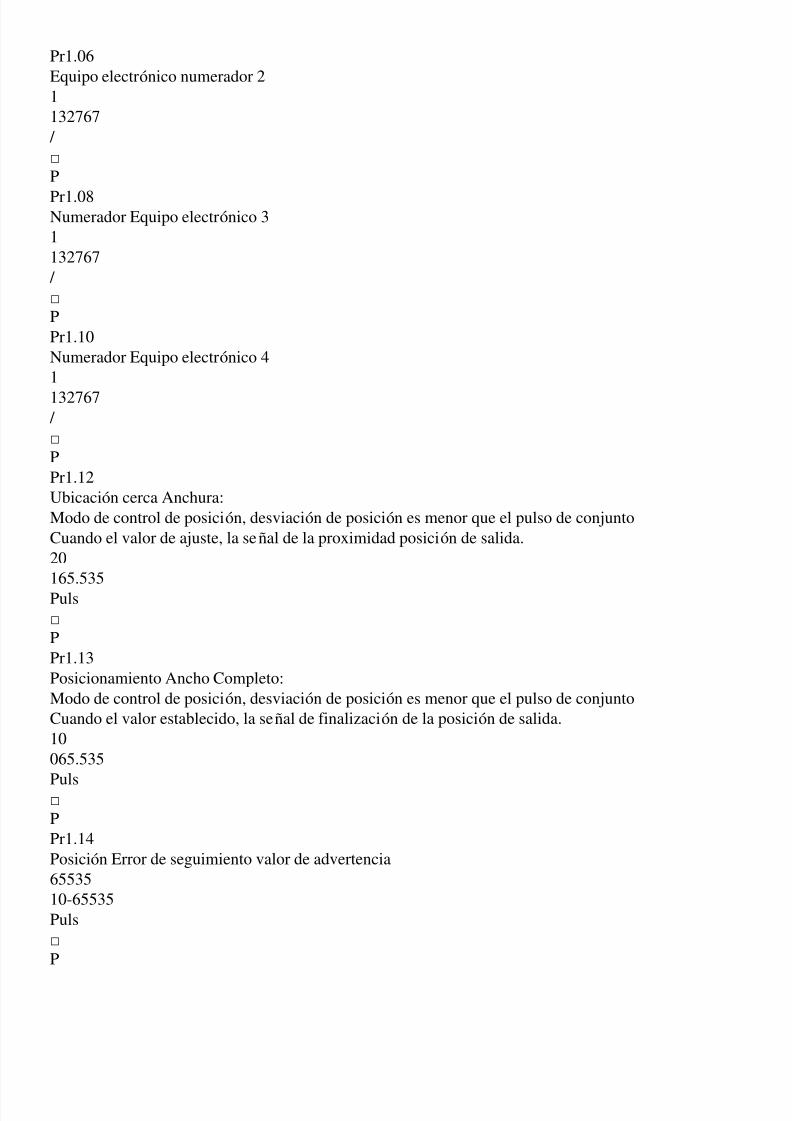
Pr1.06
Equipo electrónico numerador 2
1
132767
/
□P
Pr1.08Numerador Equipo electrónico 3
1
132767
/
□P
Pr1.10
Numerador Equipo electrónico 4
1
132767 /
□P
Pr1.12
Ubicación cerca Anchura:
Modo de control de posición, desviación de posición es menor que el pulso de conjunto
Cuando el valor de ajuste, la señal de la proximidad posición de salida.
20
165.535
Puls
□P
Pr1.13
Posicionamiento Ancho Completo:
Modo de control de posición, desviación de posición es menor que el pulso de conjunto
Cuando el valor establecido, la señal de finalización de la posición de salida.
10
065.535
Puls□
P
Pr1.14
Posición Error de seguimiento valor de advertencia
65535
10-65535
Puls
□
P
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 24/102
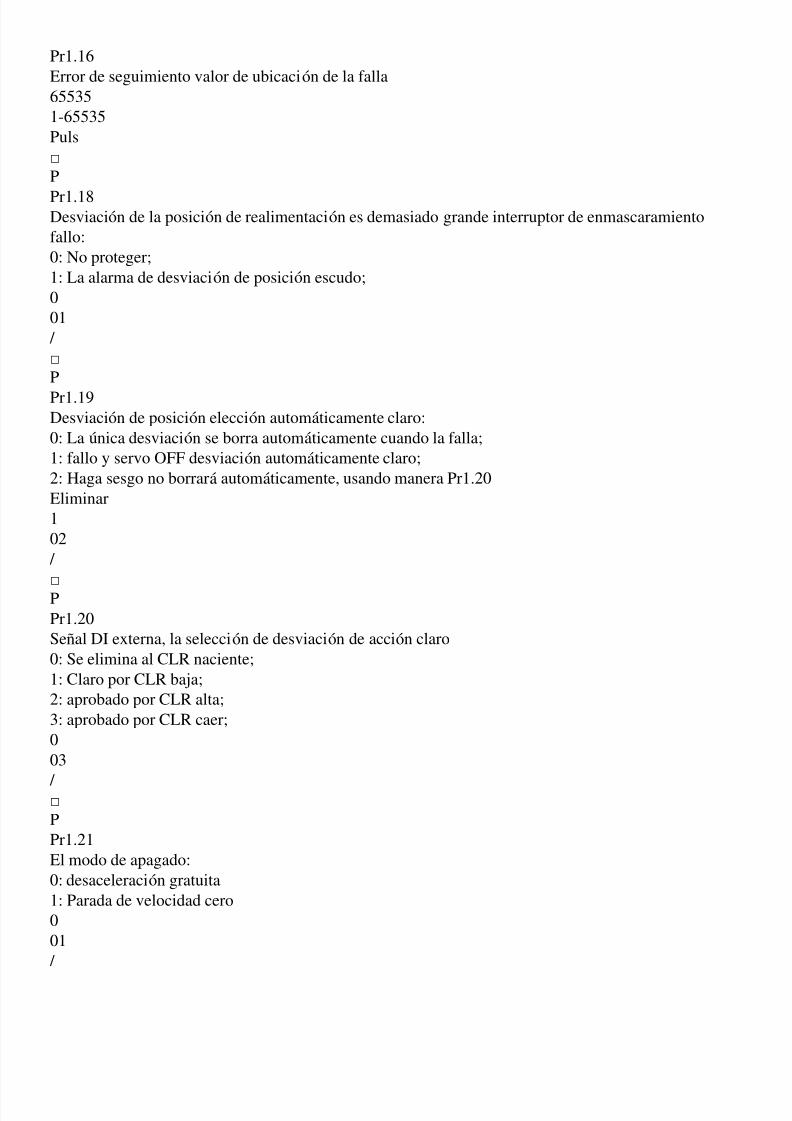
Pr1.16
Error de seguimiento valor de ubicación de la falla
65535
1-65535
Puls
□P
Pr1.18Desviación de la posición de realimentación es demasiado grande interruptor de enmascaramiento
fallo:
0: No proteger;
1: La alarma de desviación de posición escudo;
0
01
/
□P
Pr1.19Desviación de posición elección automáticamente claro:
0: La única desviación se borra automáticamente cuando la falla;
1: fallo y servo OFF desviación automáticamente claro;
2: Haga sesgo no borrará automáticamente, usando manera Pr1.20
Eliminar
1
02
/
□
P
Pr1.20
Señal DI externa, la selección de desviación de acción claro
0: Se elimina al CLR naciente;
1: Claro por CLR baja;
2: aprobado por CLR alta;
3: aprobado por CLR caer;
0
03
/ □
P
Pr1.21
El modo de apagado:
0: desaceleración gratuita
1: Parada de velocidad cero
0
01
/
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 25/102
□
PST
Página 21
Chuan vigor servo servo serie B2 Instrucciones
--17--
Número de parámetro
Código de función Descripción
Valor por defecto
Ajustes
Unidad
Propiedad
Ejecutar
Modo
Pr1.22
Posición fuente de comando:
0: Comando de impulso externo1: ajuste de registro interno
1
01
/
□
P
Pr1.24
Multi-localización de selección del modo de funcionamiento interno:
0: Ejecutar desde PR1 a PR16, la circulación;
1: Ejecutar desde PR1 a PR16, no reciclados;2: Interruptor DI Externo;
0
02
/
□
P
Pr1.25
Después de que el servo ON señal al freno electromagnético abierto (ascensor
Freno) Tiempo de retardo
5000500
ms
□PST
Pr1.26
Después de servo OFF señal al freno electromagnético está apagado (inicio
Freno) Tiempo de retardo
500
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 26/102
0500
ms
□PST
Pr1.27
Comando de velocidad freno electromagnético en vigor
100
11000rpm
□PST
Pr1.28
Velocidad fuente de comando:
0: Conjunto registro interno;
1: analógica 1 (EA1) dará;
2: analógica 2 (EA2) dará;
3: analógica 3 (EA3) dará;
4: Interruptor de comando de velocidad interna;5: Jog (para una JOG DI externa de permiso);
0
05
/
□S
Pr1.29
Selección del modo de operación de varias velocidades
0: ciclo de conmutación automática de varias velocidades;
1: Multi-velocidad de desconexión automática, sin la circulación;
2: Multi-velocidad interruptor DI externa;
0
02
/
□S
Pr1.30
Motor de consigna de alarma de exceso de velocidad
500005000
rpm
□
PST
Pr1.31
Velocidad cero umbral de detección de salida
10
0100
rpm
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 27/102
□
PST
Pr1.32
Señal de rotación umbral de velocidad de salida
10
01000
rpm
□PST
Pr1.33
Velocidad se acerca al umbral
100
103000
rpm
□
S
Pr1.34
Velocidad alcanza el valor umbral20
13000
rpm
□
S
Pr1.35
Comando de velocidad analógico cero valor fijo:
Cuando la señal de entrada analógica es inferior a este valor de ajuste, el motor
Está encerrado en un rango fijo de entrada en vigor del impulso cero ± 1
Inside.
10
0300
rpm
□S
Pr1.36
Comando de velocidad analógico de ganancia:
± 10V entrada analógica corresponde a la máxima velocidad.
500005000
rpm
□S
Pr1.37
Fuerza interferencias entrada de pulso externo
3
07
/
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 28/102
□
P
Pr1.38
Entrada de pulso externo de tiempo constante de alisamiento
0
0500
ms
□P
Pr1.39
Lisa de mando avanzado tiempo de desaceleración constante Posición S-type
100
110000
ms
□
P
Pr1.40
Posición de tipo S instrucción inversión suave deceleración constante100
110000
ms
□
P
Pr1.41
Ubicación S curva suave aceleración y deceleración suave constante
10
01000
ms
□P
Pr1.42
Filtro de realimentación de velocidad y el tiempo de supresión de rozamiento constante
500
030000
nosotros
□
SPr1.43
Velocidad de tipo S comando lisa tiempo de aceleración constante
100
110000
ms
□
S
Pr1.44
Velocidad de tipo S comando suave deceleración constante
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 29/102
100
110000
ms
□
S
Pr1.45
Suave aceleración suave curva y el tiempo de desaceleración constante velocidad S
1001000
ms
□
S
Pr1.46
Comando de velocidad de paso bajo tiempo de alisamiento de filtro
0.0
0.01000.0
ms
□S
Página 22
Chuan vigor servo servo serie B2 Instrucciones
--18--
Número de parámetro
Código de función Descripción
Valor por defecto
AjustesUnidad
Propiedad
Ejecutar
Modo
Pr1.47
Realimentación de corriente constante de tiempo de filtro
100
010000
nosotros
□PST
Pr1.48
Par de referencia actual y constante de tiempo del filtro de supresión de resonancia
100
010000
nosotros
□
T
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 30/102
Pr1.49
1 par Grupo frecuencia de muesca
1000
501000
/
□T
Pr1.50Grupo 1 Par profundidad de la muesca filtro de muesca
0
032
/
□T
Pr1.51
Par 2 Grupo frecuencia de muesca
1000
501000 /
□T
Pr1.52
Grupo 2 Torque profundidad de la muesca filtro de muesca
0
032
/
□T
Pr1.53
Grupo 3 Torque frecuencia muesca
1000
501000
/
□
T
Pr1.54
Grupo 3 Torque profundidad de la muesca filtro de muesca0
032
/
□
T
Pr1.60
Fallo opciones de visualización:
0: El último fallo;
1: Antes de que el último fallo 1 culpa;
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 31/102
2: 2 veces antes de que el último fallo culpa;
3: 3 veces antes de que el último fallo culpa;
0
03
/
□PST
Pr1.61Parámetros de inicialización del sistema:
0: ninguna acción;
1: registros de averí a claros;
65535: restaurar la configuración de f ábrica;
(Re-poder, borra automáticamente);
0
065.535
/
■
PSTPr1.63
F código de función contraseña de apertura
0
01
/
□
PST
4.2.3 parámetros de control de posición Internos
Número de parámetro
Código de función Descripción
Valor por defecto
Ajustes
Unidad
Propiedad
Ejecutar
Modo
Pr2.00
Comando interno de posición se vuelve 1
030000- 3000
revolución
□P
Pr2.01
Posición interna impulsos de mando 1
0
-9999- + 9999
Puls
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 32/102
□
P
Pr2.02
La velocidad de movimiento de comando de posición interna 1
1000
1 hasta 3000
rpm
□P
Pr2.03
Después de la terminación de entrar en el tiempo de espera Pr2 Pr1
1.0
0,0-3.000,0
s
□
P
Pr2.04
Comando interno de posición se convierte 20
30000- 3000
revolución
□
P
Pr2.05
Comando interno posición del número de impulsos 2
0
-9999- + 9999
Puls
□P
Pr2.06
La velocidad de movimiento de comando de posición interna 2
1000
1 hasta 3000
rpm
□
PPr2.07
Después de la terminación de entrar en el tiempo de espera Pr2 Pr3
1.0
0,0-3.000,0
s
□
P
Pr2.08
Número de vueltas del comando de posición interna 3
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 33/102
0
30000- 3000
revolución
□
P
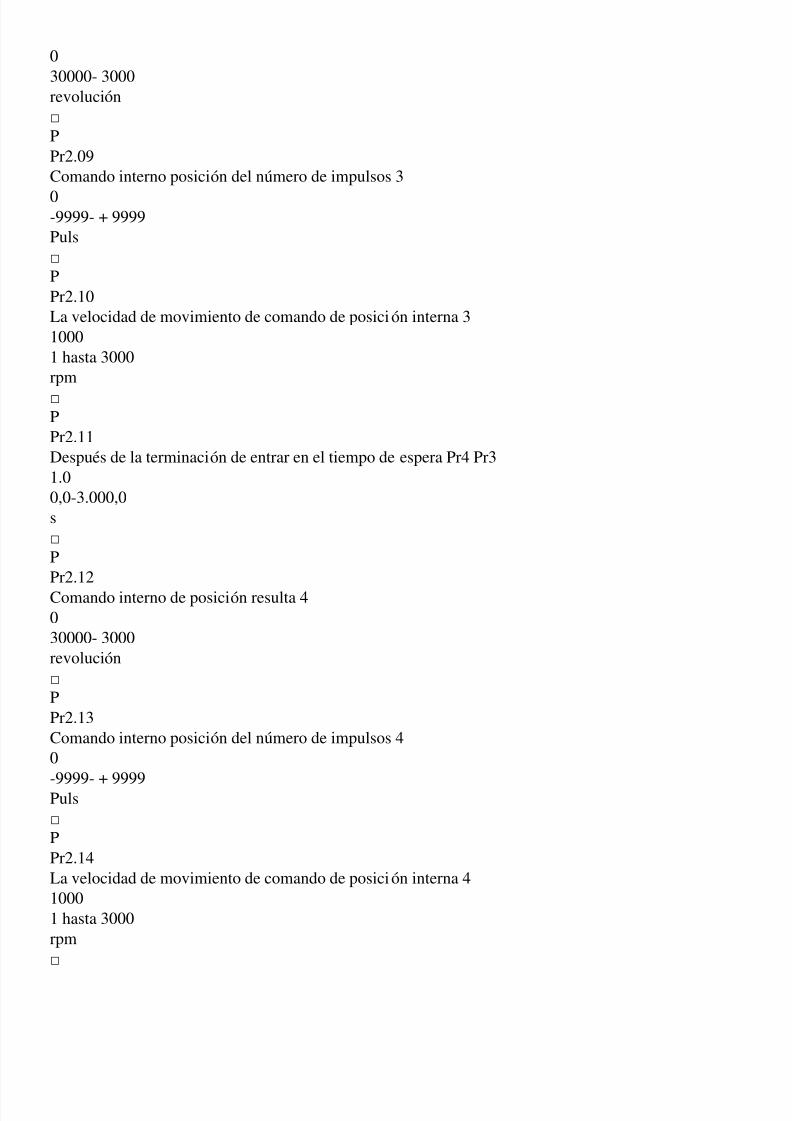
Pr2.09
Comando interno posición del número de impulsos 3
0-9999- + 9999
Puls
□
P
Pr2.10
La velocidad de movimiento de comando de posición interna 3
1000
1 hasta 3000
rpm
□P
Pr2.11
Después de la terminación de entrar en el tiempo de espera Pr4 Pr3
1.0
0,0-3.000,0
s
□
P
Pr2.12
Comando interno de posición resulta 4
0
30000- 3000
revolución
□P
Pr2.13
Comando interno posición del número de impulsos 4
0
-9999- + 9999Puls
□P
Pr2.14
La velocidad de movimiento de comando de posición interna 4
1000
1 hasta 3000
rpm
□
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 34/102
P
Pr2.15
Después de la terminación de entrar en el tiempo de espera Pr5 Pr4
1.0
0,0-3.000,0
s
□
PPr2.16
Comando de posición interna 5 vueltas
0
30000- 3000
revolución
□
P
Pr2.17
Comando interno posición del número de impulsos 5
0-9999- + 9999
Puls
□
P
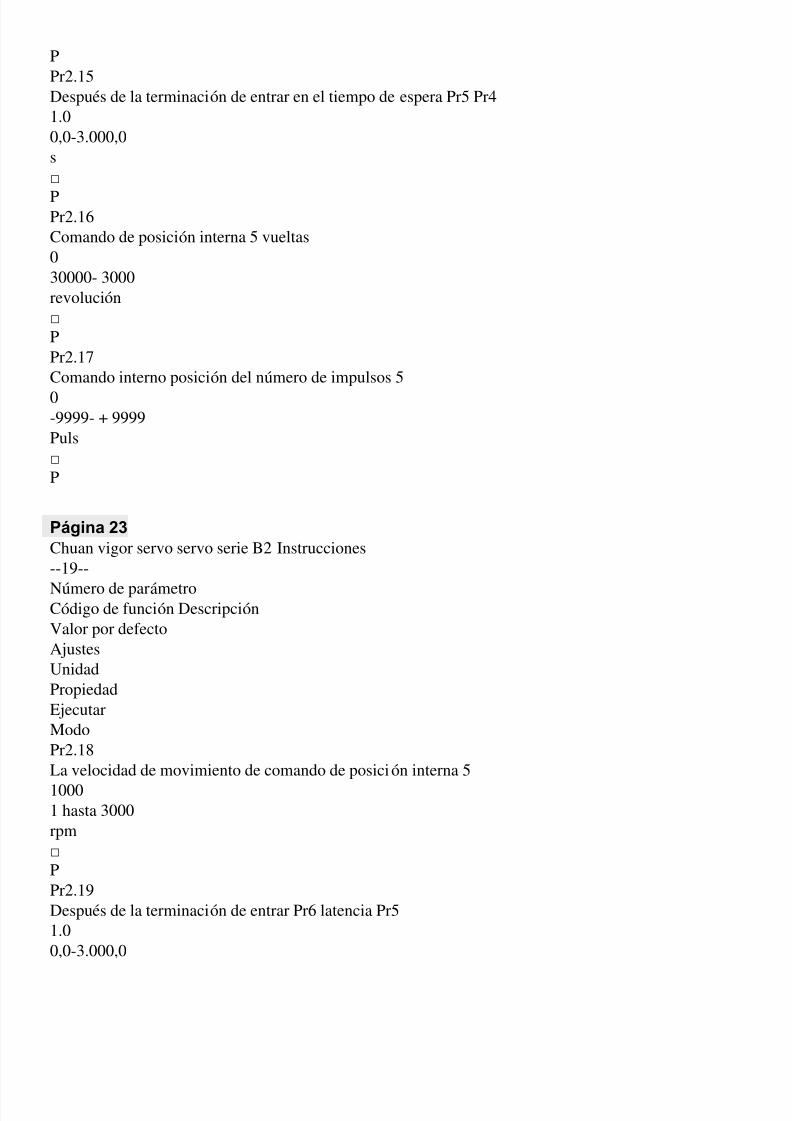
Página 23
Chuan vigor servo servo serie B2 Instrucciones
--19--
Número de parámetroCódigo de función Descripción
Valor por defecto
Ajustes
Unidad
Propiedad
Ejecutar
Modo
Pr2.18
La velocidad de movimiento de comando de posición interna 5
10001 hasta 3000
rpm
□P
Pr2.19
Después de la terminación de entrar Pr6 latencia Pr5
1.0
0,0-3.000,0
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 35/102
s
□
P
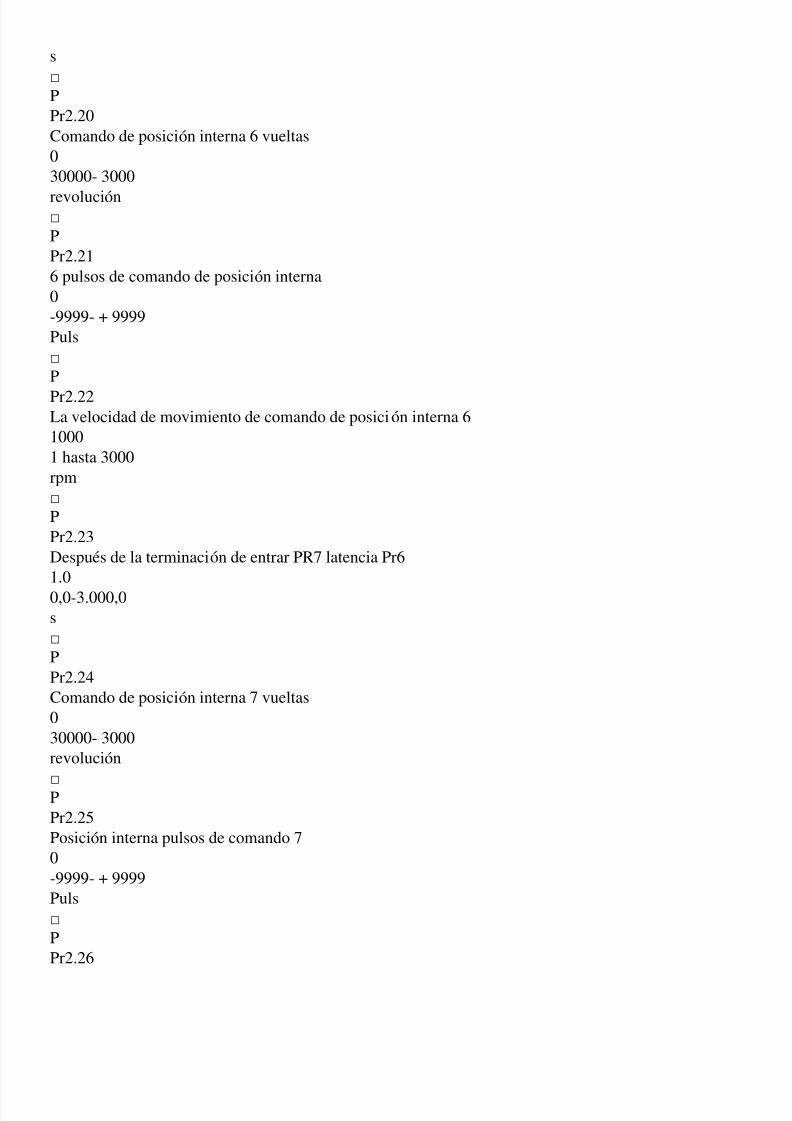
Pr2.20
Comando de posición interna 6 vueltas
0
30000- 3000
revolución□
P
Pr2.21
6 pulsos de comando de posición interna
0
-9999- + 9999
Puls
□P
Pr2.22La velocidad de movimiento de comando de posición interna 6
1000
1 hasta 3000
rpm
□P
Pr2.23
Después de la terminación de entrar PR7 latencia Pr6
1.0
0,0-3.000,0
s
□
P
Pr2.24
Comando de posición interna 7 vueltas
0
30000- 3000
revolución
□P
Pr2.25
Posición interna pulsos de comando 7
0
-9999- + 9999
Puls
□
P
Pr2.26
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 36/102
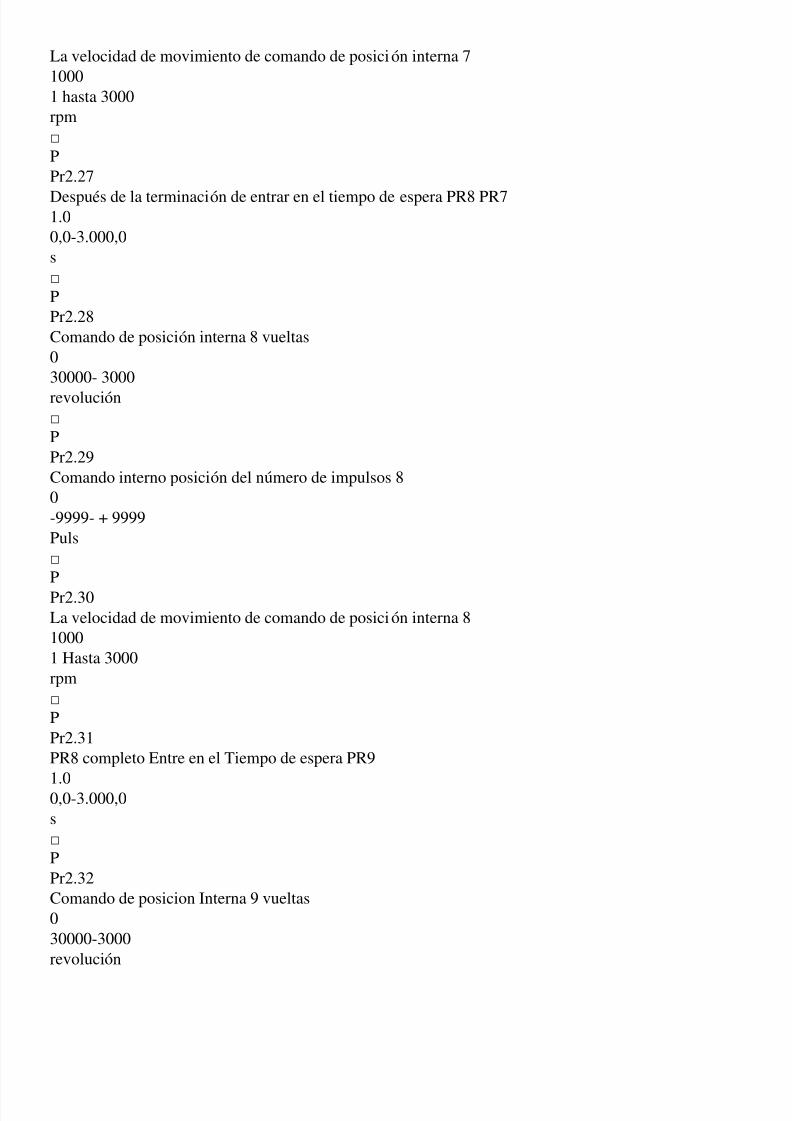
La velocidad de movimiento de comando de posición interna 7
1000
1 hasta 3000
rpm
□
P
Pr2.27
Después de la terminación de entrar en el tiempo de espera PR8 PR71.0
0,0-3.000,0
s
□
P
Pr2.28
Comando de posición interna 8 vueltas
0
30000- 3000
revolución
□P
Pr2.29
Comando interno posición del número de impulsos 8
0
-9999- + 9999
Puls
□P
Pr2.30
La velocidad de movimiento de comando de posición interna 8
1000
1 Hasta 3000
rpm
□P
Pr2.31
PR8 completo Entre en el Tiempo de espera PR9
1.00,0-3.000,0
s
□P
Pr2.32
Comando de posicion Interna 9 vueltas
0
30000-3000
revolución
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 37/102
□
P
Pr2.33
Comando interno posicion del Número de impulsos 9
0
-9999- + 9999
Puls
□P
Pr2.34
La Velocidad de movimiento de comando de posicion interna 9
1000
1 Hasta 3000
rpm
□
P
Pr2.35
Tiempo de espera PR9 entrada completa PR101.0
0,0-3.000,0
s
□
P
Pr2.36
Interno Comando de posicion 10 Resultados de la Búsqueda
0
30000-3000
revolución
□P
Pr2.37
Número de pulsos de comando de posicion interna 10
0
-9999- + 9999
Puls
□
PPr2.38
La Velocidad de movimiento de comando de posicion interna 10
1000
1 Hasta 3000
rpm
□
P
Pr2.39
PR10 PR11 completo Entre en el Tiempo de espera
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 38/102
1.0
0,0-3.000,0
s
□
P
Pr2.40
Interno Comando de posicion 11 Resultados de la Búsqueda
030000-3000
revolución
□
P
Pr2.41
Número de pulsos de comando de posicion interna 11
0
-9999- + 9999
Puls
□P
Pr2.42
La Velocidad de movimiento de comando de posicion interna 11
1000
1 Hasta 3000
rpm
□
P
Pr2.43
PR12 PR11 completo Entre en el Tiempo de espera
1.0
0,0-3.000,0
s
□P
Pr2.44
Interno Comando Resultados de la Búsqueda de posicion 12
0
30000-3000revolución
□P
Pr2.45
Posicion interna pulsos de comando 12
0
-9999- + 9999
Puls
□
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 39/102
P
Pr2.46
La Velocidad de movimiento de comando de posicion interna 12
1000
1 Hasta 3000
rpm
□
PPr2.47
PR12 PR13 completo Entre en el Tiempo de espera
1.0
0,0-3.000,0
s
□
P
Pr2.48
Comando interno de posicion cumple 13 años
030000-3000
revolución
□
P
Pr2.49
Número de pulsos de comando de posicion interna 13
0
-9999- + 9999
Puls
□
P
Pr2.50
La Velocidad de movimiento de comando de posicion interna 13
1000
1 Hasta 3000
rpm
□P
Pr2.51PR13 PR14 completo Entre en el Tiempo de espera
1.0
0,0-3.000,0
s
□P
Pr2.52
Interno Comando de posicion cumple 14
0
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 40/102
30000-3000
revolución
□P
Pr2.53
Número de pulsos de comando de posicion interna 14
0
-9999- + 9999Puls
□P
Pr2.54
La Velocidad de movimiento de comando de posicion interna 14
1000
1 Hasta 3000
rpm
□
PPr2.55
PR14 PR15 completo Entre en el Tiempo de espera
1.0
0,0-3.000,0
s
□
P
Pr2.56
Interno Comando de posicion cumple 15
0
30000-3000
revolución
□
P
Pr2.57
Número de pulsos de comando de posicion interna 15
0
-9999- + 9999
Puls□
P
Pr2.58
La Velocidad de movimiento de comando de posicion interna 15
1000
1 Hasta 3000
rpm
□P
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 41/102
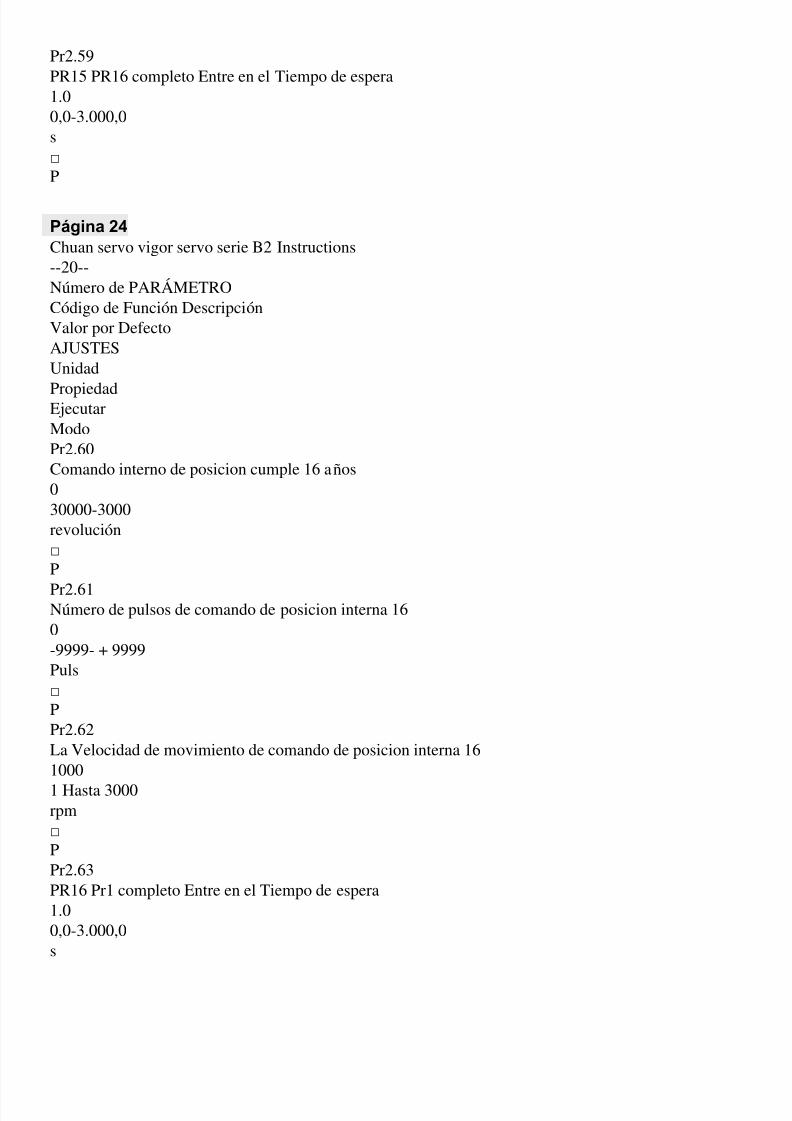
Pr2.59
PR15 PR16 completo Entre en el Tiempo de espera
1.0
0,0-3.000,0
s
□P
Página 24
Chuan servo vigor servo serie B2 Instructions
--20--
Número de PARÁMETRO
Código de Función Descripción
Valor por Defecto
AJUSTES
Unidad
PropiedadEjecutar
Modo
Pr2.60
Comando interno de posicion cumple 16 años
0
30000-3000
revolución
□
P
Pr2.61Número de pulsos de comando de posicion interna 16
0
-9999- + 9999
Puls
□
P
Pr2.62
La Velocidad de movimiento de comando de posicion interna 16
1000
1 Hasta 3000rpm
□
P
Pr2.63
PR16 Pr1 completo Entre en el Tiempo de espera
1.0
0,0-3.000,0
s
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 42/102
□
P
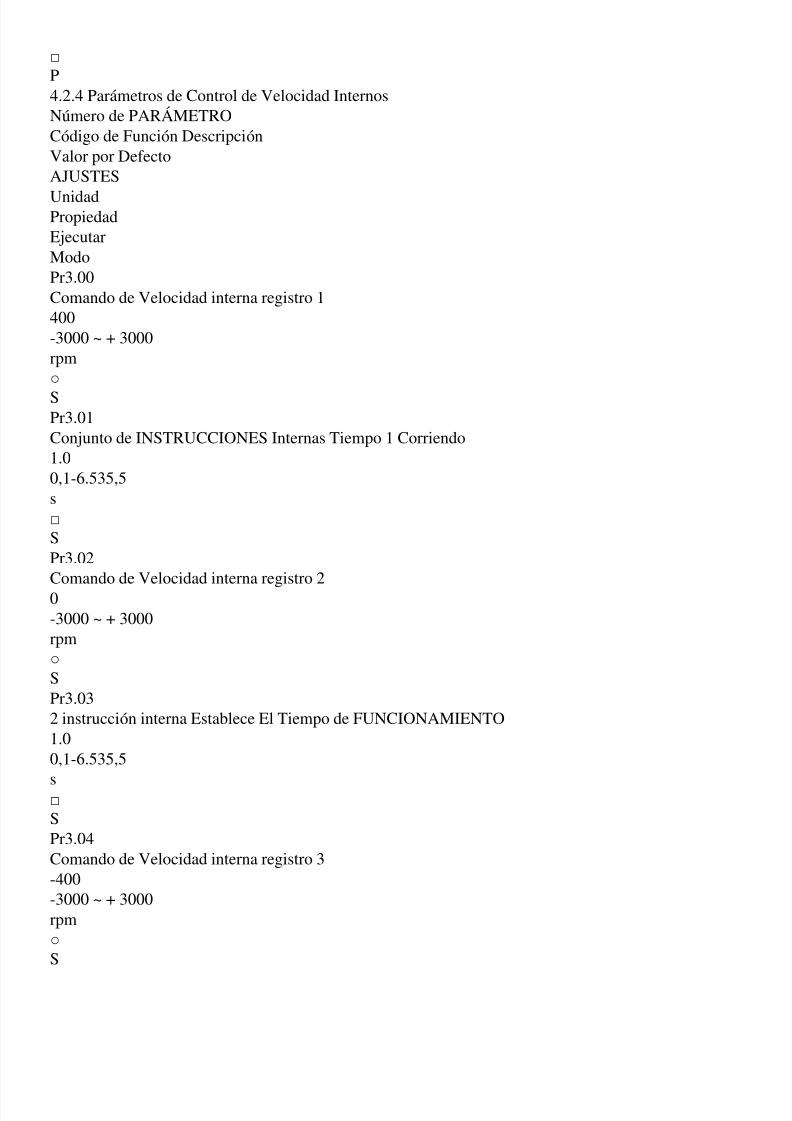
4.2.4 Parámetros de Control de Velocidad Internos
Número de PARÁMETRO
Código de Función Descripción
Valor por Defecto
AJUSTES
UnidadPropiedad
Ejecutar
Modo
Pr3.00
Comando de Velocidad interna registro 1
400
-3000 ~ + 3000
rpm
○
SPr3.01
Conjunto de INSTRUCCIONES Internas Tiempo 1 Corriendo
1.0
0,1-6.535,5
s
□
S
Pr3.02
Comando de Velocidad interna registro 2
0
-3000 ~ + 3000
rpm
○
S
Pr3.03
2 instrucción interna Establece El Tiempo de FUNCIONAMIENTO
1.0
0,1-6.535,5
s□
S
Pr3.04
Comando de Velocidad interna registro 3
-400
-3000 ~ + 3000
rpm
○
S
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 43/102
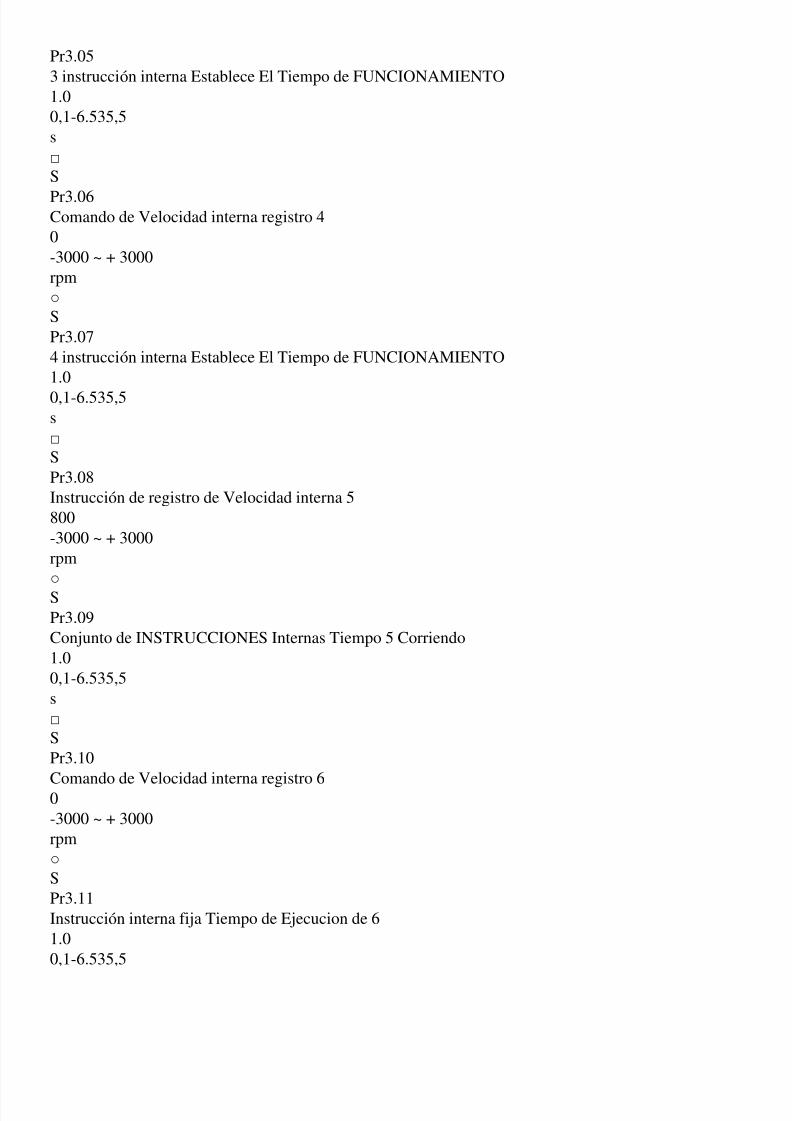
Pr3.05
3 instrucción interna Establece El Tiempo de FUNCIONAMIENTO
1.0
0,1-6.535,5
s
□S
Pr3.06Comando de Velocidad interna registro 4
0
-3000 ~ + 3000
rpm
○S
Pr3.07
4 instrucción interna Establece El Tiempo de FUNCIONAMIENTO
1.0
0,1-6.535,5s
□S
Pr3.08
Instrucción de registro de Velocidad interna 5
800
-3000 ~ + 3000
rpm
○S
Pr3.09
Conjunto de INSTRUCCIONES Internas Tiempo 5 Corriendo
1.0
0,1-6.535,5
s
□
S
Pr3.10
Comando de Velocidad interna registro 60
-3000 ~ + 3000
rpm
○
S
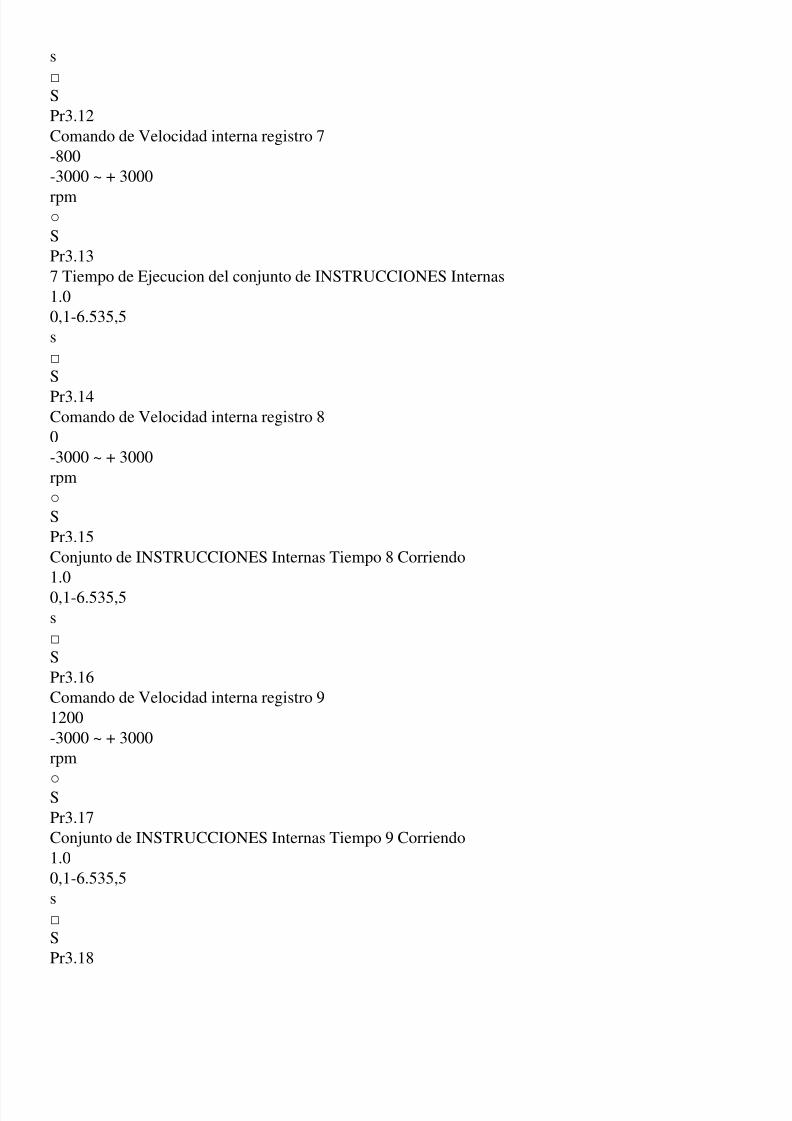
Pr3.11
Instrucción interna fija Tiempo de Ejecucion de 6
1.0
0,1-6.535,5
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 44/102
s
□
S
Pr3.12
Comando de Velocidad interna registro 7
-800
-3000 ~ + 3000
rpm○
S
Pr3.13
7 Tiempo de Ejecucion del conjunto de INSTRUCCIONES Internas
1.0
0,1-6.535,5
s
□S
Pr3.14Comando de Velocidad interna registro 8
0
-3000 ~ + 3000
rpm
○S
Pr3.15
Conjunto de INSTRUCCIONES Internas Tiempo 8 Corriendo
1.0
0,1-6.535,5
s
□
S
Pr3.16
Comando de Velocidad interna registro 9
1200
-3000 ~ + 3000
rpm
○S
Pr3.17
Conjunto de INSTRUCCIONES Internas Tiempo 9 Corriendo
1.0
0,1-6.535,5
s
□
S
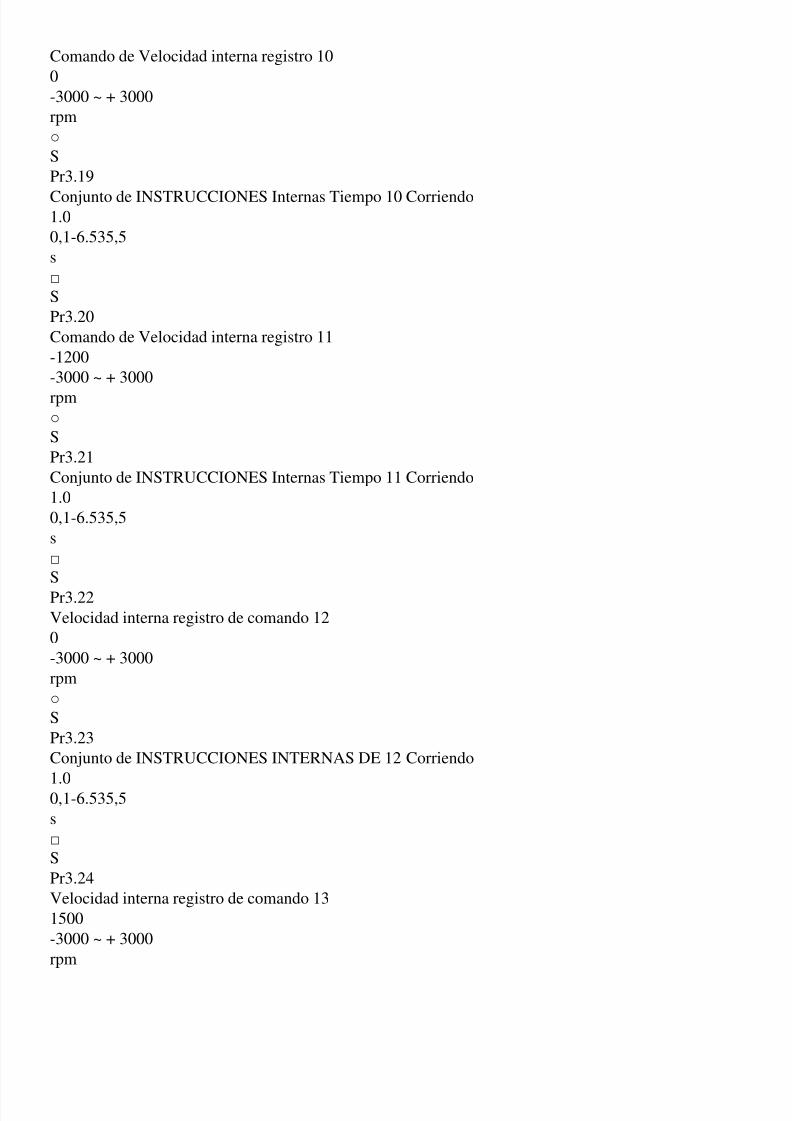
Pr3.18
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 45/102
Comando de Velocidad interna registro 10
0
-3000 ~ + 3000
rpm
○
S
Pr3.19
Conjunto de INSTRUCCIONES Internas Tiempo 10 Corriendo1.0
0,1-6.535,5
s
□
S
Pr3.20
Comando de Velocidad interna registro 11
-1200
-3000 ~ + 3000
rpm
○S
Pr3.21
Conjunto de INSTRUCCIONES Internas Tiempo 11 Corriendo
1.0
0,1-6.535,5
s
□S
Pr3.22
Velocidad interna registro de comando 12
0
-3000 ~ + 3000
rpm
○S
Pr3.23
Conjunto de INSTRUCCIONES INTERNAS DE 12 Corriendo
1.00,1-6.535,5
s
□S
Pr3.24
Velocidad interna registro de comando 13
1500
-3000 ~ + 3000
rpm
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 46/102
○
S
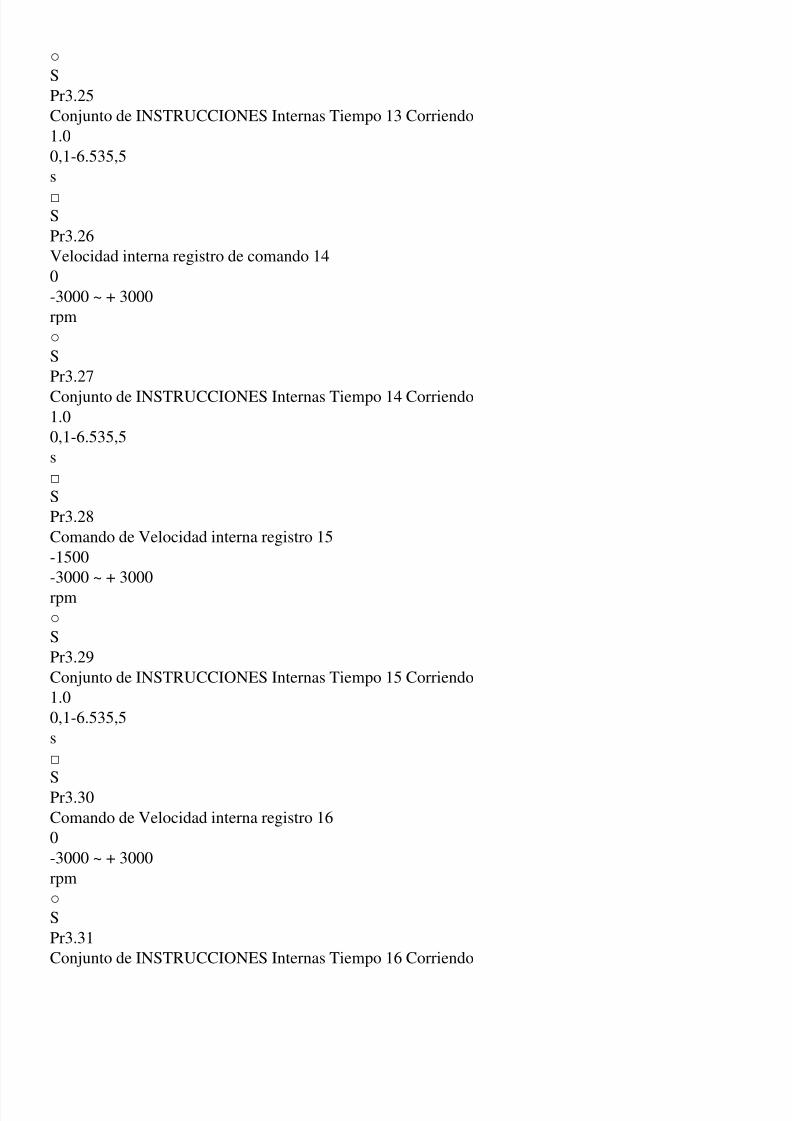
Pr3.25
Conjunto de INSTRUCCIONES Internas Tiempo 13 Corriendo
1.0
0,1-6.535,5
s
□S
Pr3.26
Velocidad interna registro de comando 14
0
-3000 ~ + 3000
rpm
○
S
Pr3.27
Conjunto de INSTRUCCIONES Internas Tiempo 14 Corriendo1.0
0,1-6.535,5
s
□
S
Pr3.28
Comando de Velocidad interna registro 15
-1500
-3000 ~ + 3000
rpm
○S
Pr3.29
Conjunto de INSTRUCCIONES Internas Tiempo 15 Corriendo
1.0
0,1-6.535,5
s
□
SPr3.30
Comando de Velocidad interna registro 16
0
-3000 ~ + 3000
rpm
○
S
Pr3.31
Conjunto de INSTRUCCIONES Internas Tiempo 16 Corriendo
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 47/102
1.0
0,1-6.535,5
s
□
S
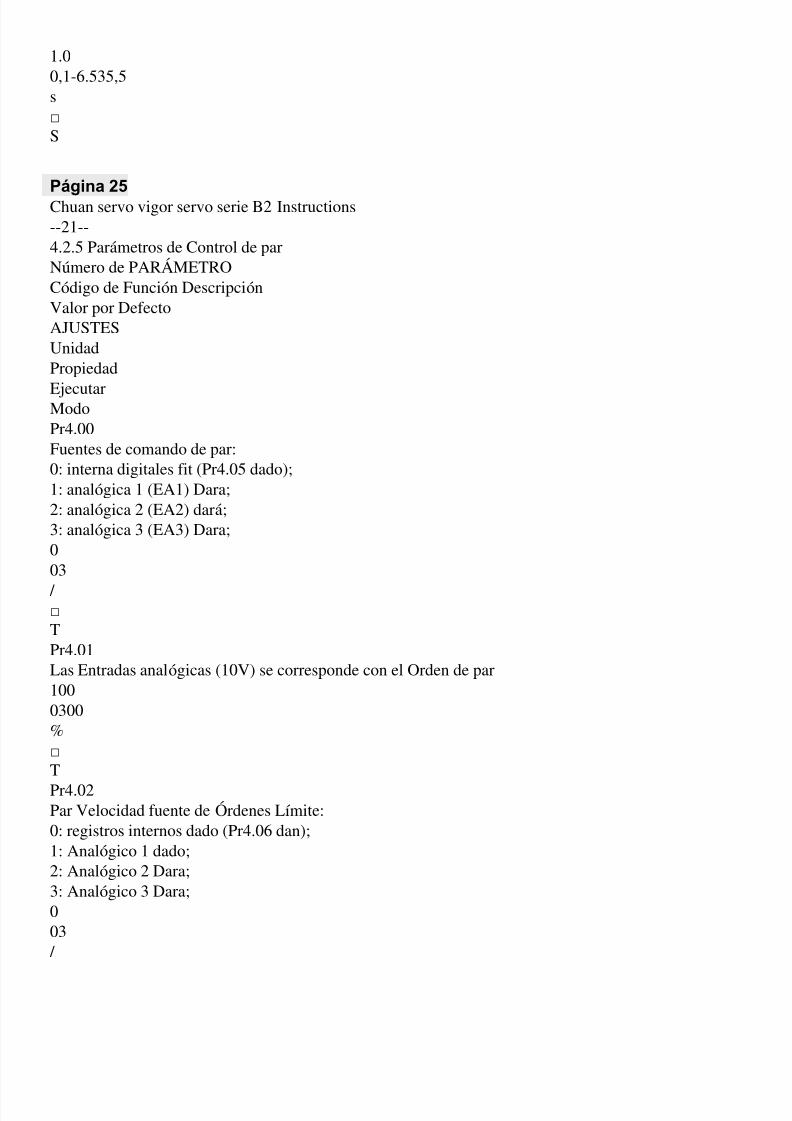
Página 25
Chuan servo vigor servo serie B2 Instructions
--21--
4.2.5 Parámetros de Control de par
Número de PARÁMETRO
Código de Función Descripción
Valor por Defecto
AJUSTES
Unidad
Propiedad
EjecutarModo
Pr4.00
Fuentes de comando de par:
0: interna digitales fit (Pr4.05 dado);
1: analógica 1 (EA1) Dara;
2: analógica 2 (EA2) dará;
3: analógica 3 (EA3) Dara;
0
03
/ □
T
Pr4.01
Las Entradas analógicas (10V) se corresponde con el Orden de par
100
0300
%
□
T
Pr4.02Par Velocidad fuente de Órdenes Lí mite:
0: registros internos dado (Pr4.06 dan);
1: Analógico 1 dado;
2: Analógico 2 Dara;
3: Analógico 3 Dara;
0
03
/
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 48/102
□
T
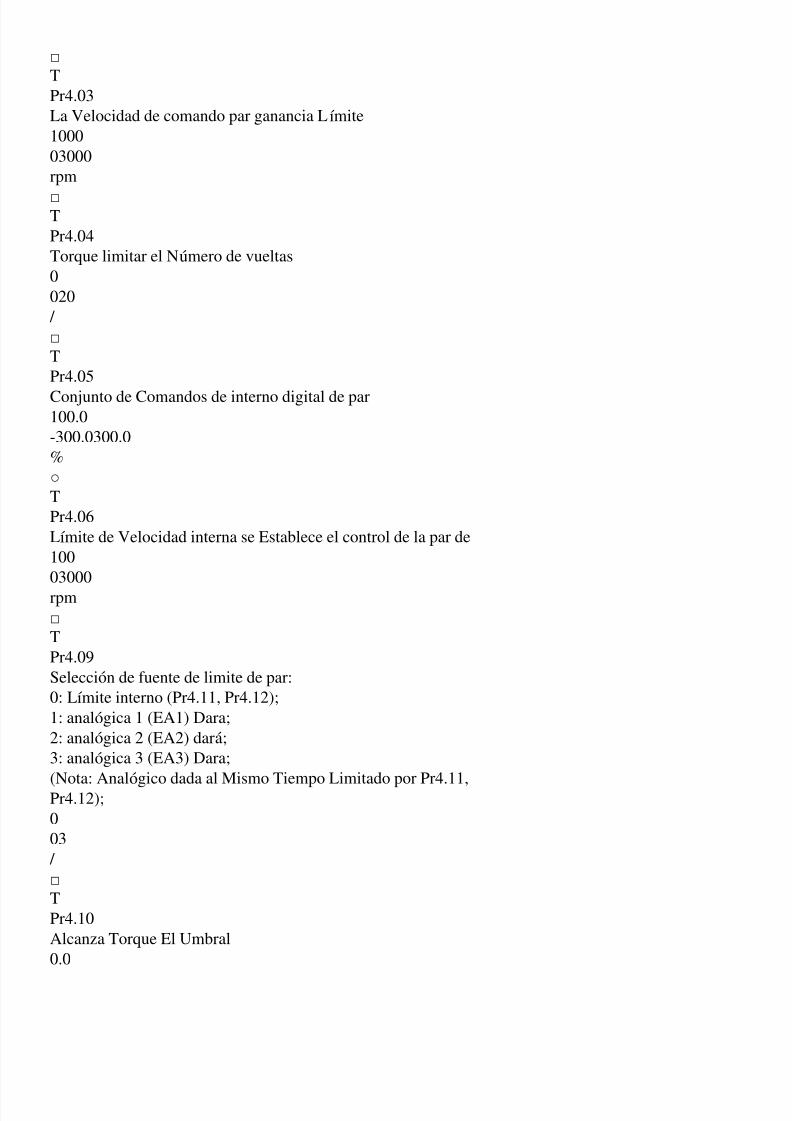
Pr4.03
La Velocidad de comando par ganancia Lí mite
1000
03000
rpm
□T
Pr4.04
Torque limitar el Número de vueltas
0
020
/
□
T
Pr4.05
Conjunto de Comandos de interno digital de par100.0
-300.0300.0
%
○
T
Pr4.06
Lí mite de Velocidad interna se Establece el control de la par de
100
03000
rpm
□T
Pr4.09
Selección de fuente de limite de par:
0: Lí mite interno (Pr4.11, Pr4.12);
1: analógica 1 (EA1) Dara;
2: analógica 2 (EA2) dará;
3: analógica 3 (EA3) Dara;
(Nota: Analógico dada al Mismo Tiempo Limitado por Pr4.11,Pr4.12);
0
03
/
□T
Pr4.10
Alcanza Torque El Umbral
0.0
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 49/102
010,0
%
□T
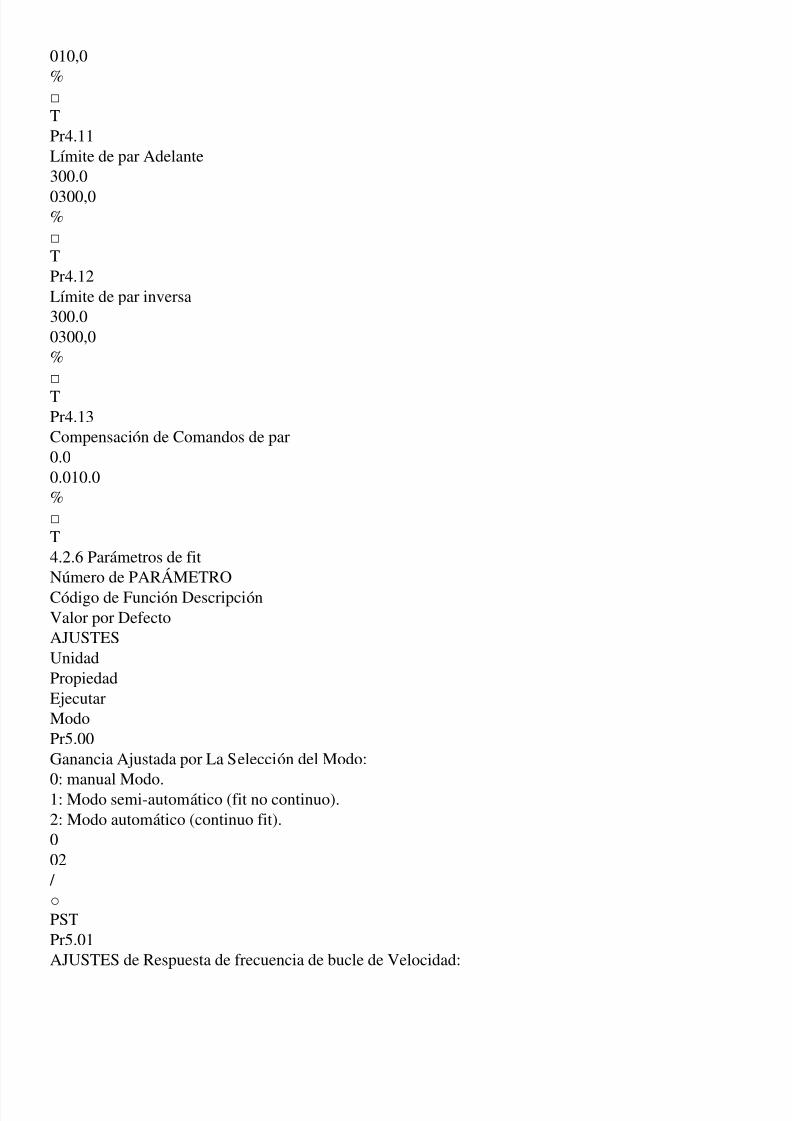
Pr4.11
Lí mite de par Adelante
300.0
0300,0%
□T
Pr4.12
Lí mite de par inversa
300.0
0300,0
%
□
TPr4.13
Compensación de Comandos de par
0.0
0.010.0
%
□
T
4.2.6 Parámetros de fit
Número de PARÁMETRO
Código de Función Descripción
Valor por Defecto
AJUSTES
Unidad
Propiedad
Ejecutar
Modo
Pr5.00
Ganancia Ajustada por La Selección del Modo:
0: manual Modo.1: Modo semi-automático (fit no continuo).
2: Modo automático (continuo fit).
0
02
/
○PST
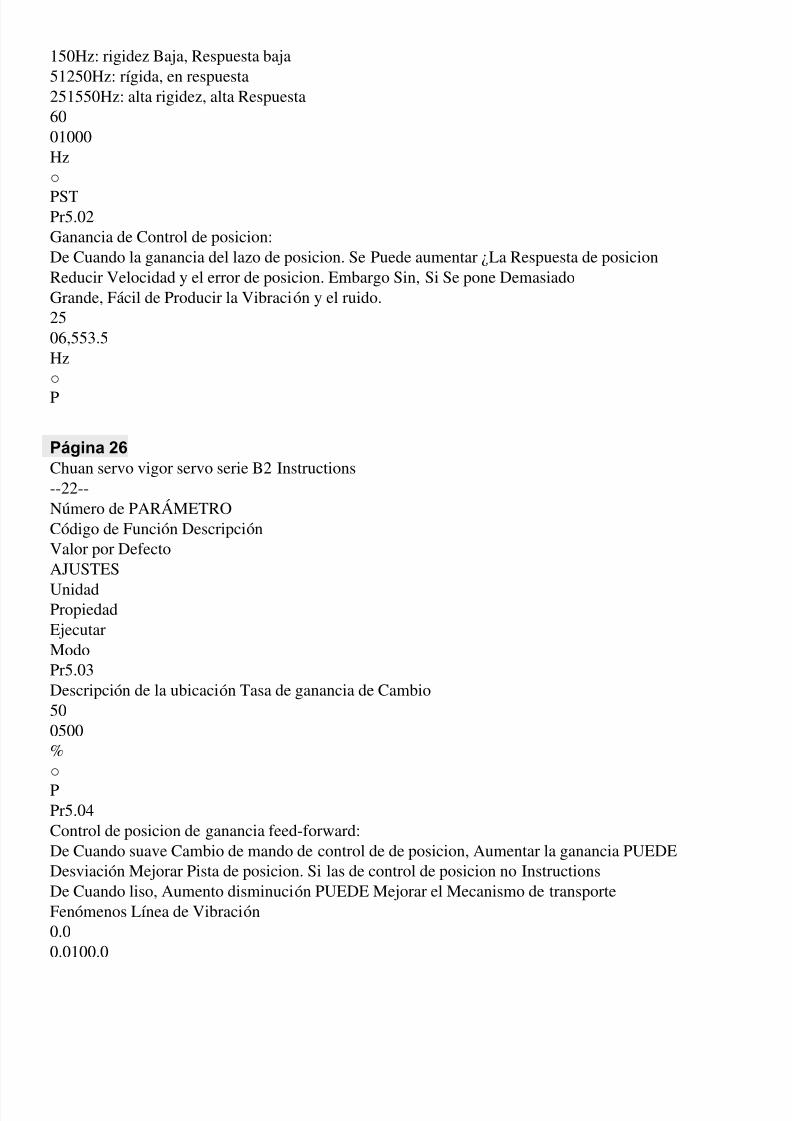
Pr5.01
AJUSTES de Respuesta de frecuencia de bucle de Velocidad:
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 50/102
150Hz: rigidez Baja, Respuesta baja
51250Hz: rí gida, en respuesta
251550Hz: alta rigidez, alta Respuesta
60
01000
Hz
○
PSTPr5.02
Ganancia de Control de posicion:
De Cuando la ganancia del lazo de posicion. Se Puede aumentar ¿La Respuesta de posicion
Reducir Velocidad y el error de posicion. Embargo Sin, Si Se pone Demasiado
Grande, Fácil de Producir la Vibración y el ruido.
25
06,553.5
Hz
○
P
Página 26
Chuan servo vigor servo serie B2 Instructions
--22--
Número de PARÁMETRO
Código de Función Descripción
Valor por Defecto
AJUSTES
UnidadPropiedad
Ejecutar
Modo
Pr5.03
Descripción de la ubicación Tasa de ganancia de Cambio
50
0500
%
○
PPr5.04
Control de posicion de ganancia feed-forward:
De Cuando suave Cambio de mando de control de de posicion, Aumentar la ganancia PUEDE
Desviación Mejorar Pista de posicion. Si las de control de posicion no Instructions
De Cuando liso, Aumento disminución PUEDE Mejorar el Mecanismo de transporte
Fenómenos Lí nea de Vibración
0.0
0.0100.0
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 51/102
%
○
P
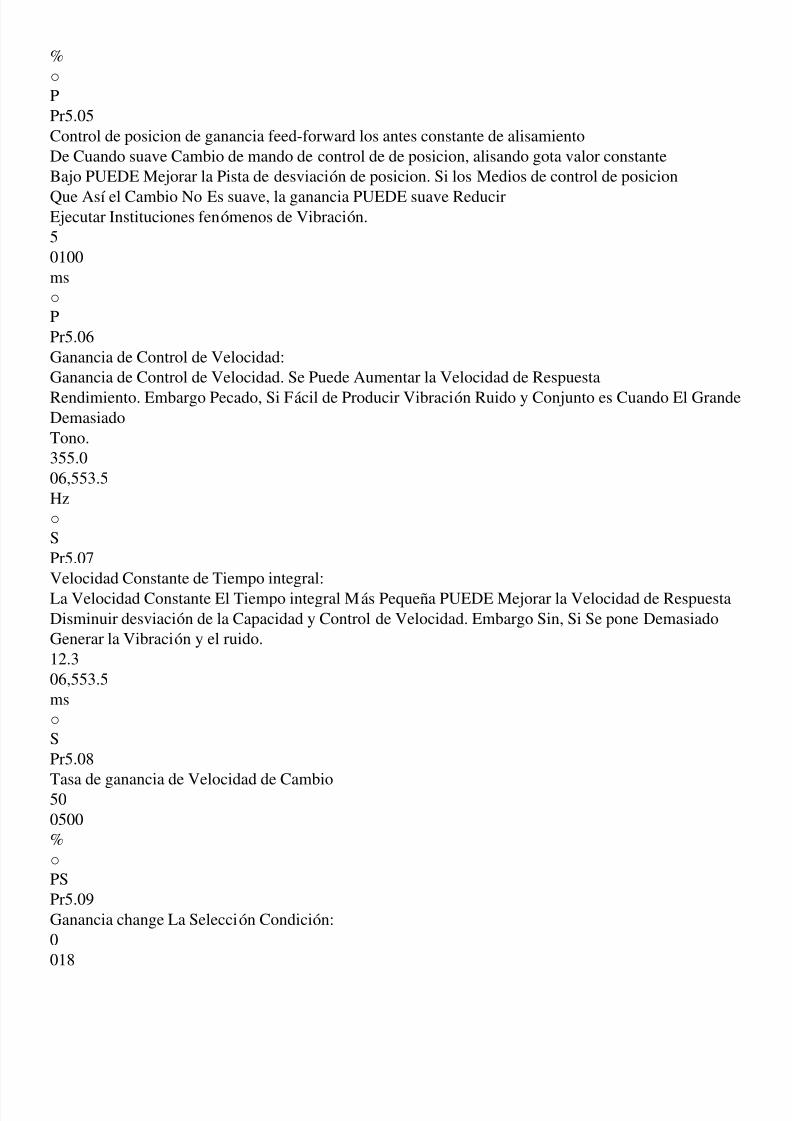
Pr5.05
Control de posicion de ganancia feed-forward los antes constante de alisamiento
De Cuando suave Cambio de mando de control de de posicion, alisando gota valor constante
Bajo PUEDE Mejorar la Pista de desviación de posicion. Si los Medios de control de posicion
Que Así el Cambio No Es suave, la ganancia PUEDE suave ReducirEjecutar Instituciones fenómenos de Vibración.
5
0100
ms
○P
Pr5.06
Ganancia de Control de Velocidad:
Ganancia de Control de Velocidad. Se Puede Aumentar la Velocidad de Respuesta
Rendimiento. Embargo Pecado, Si Fácil de Producir Vibración Ruido y Conjunto es Cuando El GrandeDemasiado
Tono.
355.0
06,553.5
Hz
○
S
Pr5.07
Velocidad Constante de Tiempo integral:
La Velocidad Constante El Tiempo integral Más Pequeña PUEDE Mejorar la Velocidad de Respuesta
Disminuir desviación de la Capacidad y Control de Velocidad. Embargo Sin, Si Se pone Demasiado
Generar la Vibración y el ruido.
12.3
06,553.5
ms
○
S
Pr5.08
Tasa de ganancia de Velocidad de Cambio50
0500
%
○
PS
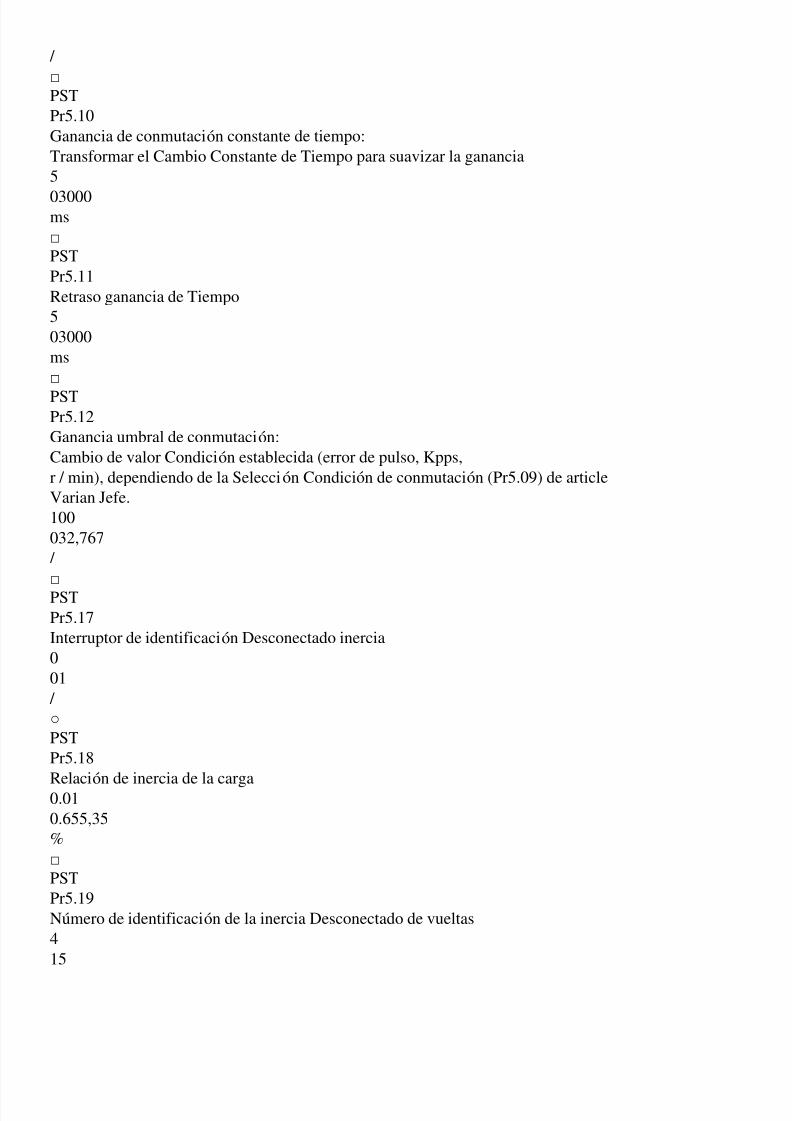
Pr5.09
Ganancia change La Selección Condición:
0
018
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 52/102
/
□
PST
Pr5.10
Ganancia de conmutación constante de tiempo:
Transformar el Cambio Constante de Tiempo para suavizar la ganancia
5
03000ms
□PST
Pr5.11
Retraso ganancia de Tiempo
5
03000
ms
□
PSTPr5.12
Ganancia umbral de conmutación:
Cambio de valor Condición establecida (error de pulso, Kpps,
r / min), dependiendo de la Selección Condición de conmutación (Pr5.09) de article
Varian Jefe.
100
032,767
/
□PST
Pr5.17
Interruptor de identificación Desconectado inercia
0
01
/
○
PST
Pr5.18
Relación de inercia de la carga0.01
0.655,35
%
□
PST
Pr5.19
Número de identificación de la inercia Desconectado de vueltas
4
15
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 53/102
r
□
PST
Pr5.20
Retención
Pr5.21
SFEP el factor de control de regulador de Velocidad:
Utilizando el Controlador IP, la forma de onda de Velocidad Suavemente y Exceso pecado,Sin embargo, la lenta Respuesta, utilizando el Controlador de PDF IP Entre y
Entre regulador PI, PUEDE Alcanzar VELOCIDADES de pequeño sobreimpulso y Rápido
Requisitos de Respuesta Rápida
100
0100
%
□
PST
Pr5.22
Baja rigidez:Modo de Velocidad y Reducir el sobrepaso de Velocidad
1.0
0.54.0
/
□PST
Pr5.23
Coeficientes de lazo de control de:
Automático de ganancia, ganancia de lazo de posicion y la ganancia de Velocidad
Relación
17
1100
%
□
PST
Página 27
Chuan servo vigor servo serie B2 Instructions
--23--4.2.7 Parámetros de Comunicación
Número de PARÁMETRO
Código de Función Descripción
Valor por Defecto
AJUSTES
Unidad
Propiedad
Ejecutar
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 54/102
Modo
Pr7.00
AJUSTE Nº Estación
1
1254
/
○
PSTPr7.01
Comunicación Velocidad de transmisión:
0: 4800;
1: 9600;
2: 19.200;
3: 38.400;
4: 57.600;
1
04
/
○
PST
Pr7.02
Formato de Datos de Comunicación:
0: Sin paridad 1 + 8 + N + 1;
1: Odd paridad 1 + 8 + O + 1;
2: A Pesar de la paridad 1 + 8 + E + 1;
3: paridad Sin 1 + 8 + N + 2;
4: Odd paridad 1 + 8 + O + 2;
5: A Pesar de la paridad 1 + 8 + E + 2;
0
05
/
○PST
4.2.8 Parámetros auxiliares
Número de PARÁMETRO
Código de Función Descripción
Valor por DefectoAJUSTES
Unidad
Propiedad
Ejecutar
Modo
Pr8.00
Comando HIJO interna:
0: servo Interna Sobre inválida, Despues de volver de un auto Poder
Automaticamente Borra;
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 55/102
1: Activar servo ON interna;
0
01
/
○
PST
Pr8.01
Fault Reset:0: ninguna Acción;
1: Restauración de Fallos, El Tiempo de Ejecucion, borra automaticamente;
0
01
/
○
PST
Pr8.02
Función Jog (marcha blanca), introducir el Código de Función,
Motor ARRIBA Pulso Pr8.03 valor de fit se Transfiere,Afloje parada pulsando la Tecla Hacia abajo, P803 motor
Inversión de consigna, afloje parada, modo de pulso
Deje el Código de Función, trotar válido.
/
/
/
○
PST
Pr8.03
Ajuste de Velocidad de Jog
100
03000
rpm
○
PST
Pr8.05
Reinicio del software:
0: ninguna Acción;
1: restablecimiento de software de Sistema, Una Vez, borra automaticamenteZero;
0
/
/
○PST
Pr8.08
Impulsar el valor de pre-alarma de sobrecalentamiento
70
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 56/102
0 Pr8.09
℃
○PST
Pr8.09
Conduzca valor de fallo sobrecalentamiento
80
0150℃
○PST
Pr8.11
Selección de Control del ventilador:
0: Servo ADVERTENCIA de fallo del servo Cuando El FUNCIONAMIENTO del ventilador Habilitar
o
Lí nea;
1: El ventilador this Funcionando DESPUÉS del Encendido.
001
/
○
PST
Pr8.12
Configuracion de alertas ¡Drive
60
20100
%
○
PST
Pr8.13
AJUSTES de ADVERTENCIA de Sobrecarga del motor
60
20100
%
○PST
Página 28
Chuan servo vigor servo serie B2 Instructions
--24--
Número de PARÁMETRO
Código de Función Descripción
Valor por Defecto
AJUSTES
Unidad
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 57/102
Propiedad
Ejecutar
Modo
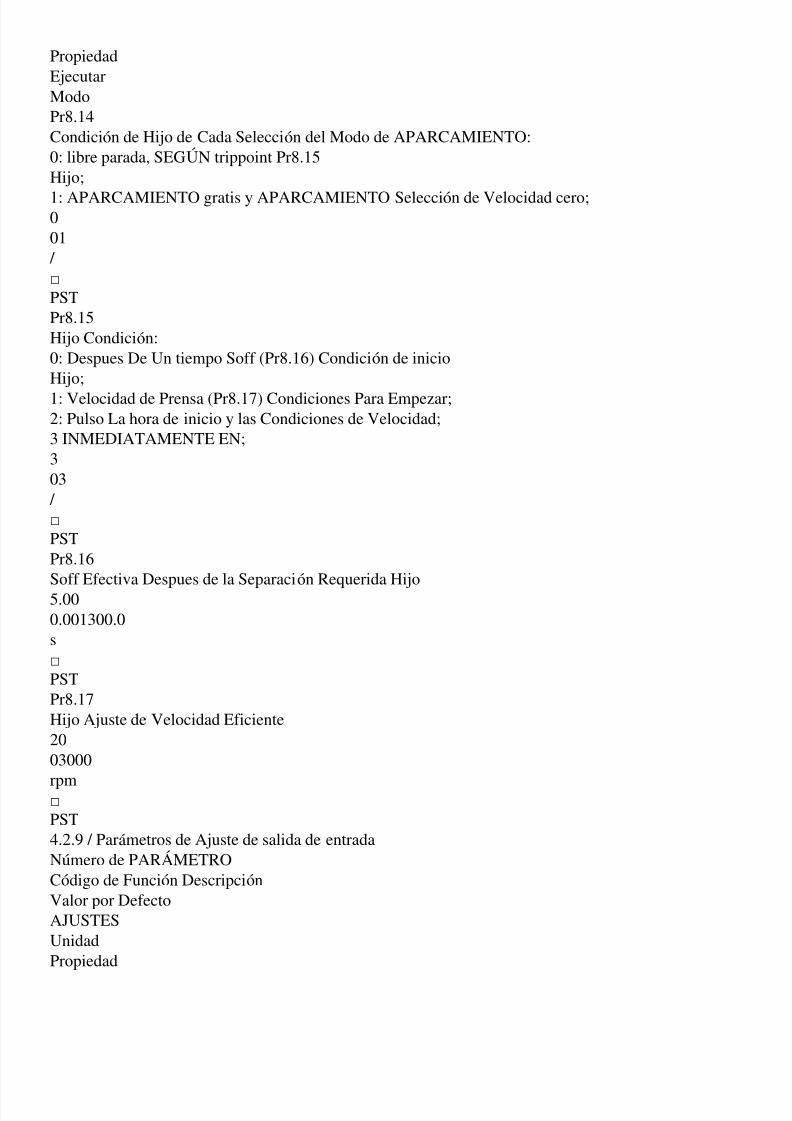
Pr8.14
Condición de Hijo de Cada Selección del Modo de APARCAMIENTO:
0: libre parada, SEGÚN trippoint Pr8.15
Hijo;
1: APARCAMIENTO gratis y APARCAMIENTO Selección de Velocidad cero;0
01
/
□
PST
Pr8.15
Hijo Condición:
0: Despues De Un tiempo Soff (Pr8.16) Condición de inicio
Hijo;
1: Velocidad de Prensa (Pr8.17) Condiciones Para Empezar;
2: Pulso La hora de inicio y las Condiciones de Velocidad;
3 INMEDIATAMENTE EN;
3
03
/
□
PST
Pr8.16
Soff Efectiva Despues de la Separación Requerida Hijo
5.00
0.001300.0
s
□
PST
Pr8.17
Hijo Ajuste de Velocidad Eficiente
20
03000
rpm□
PST
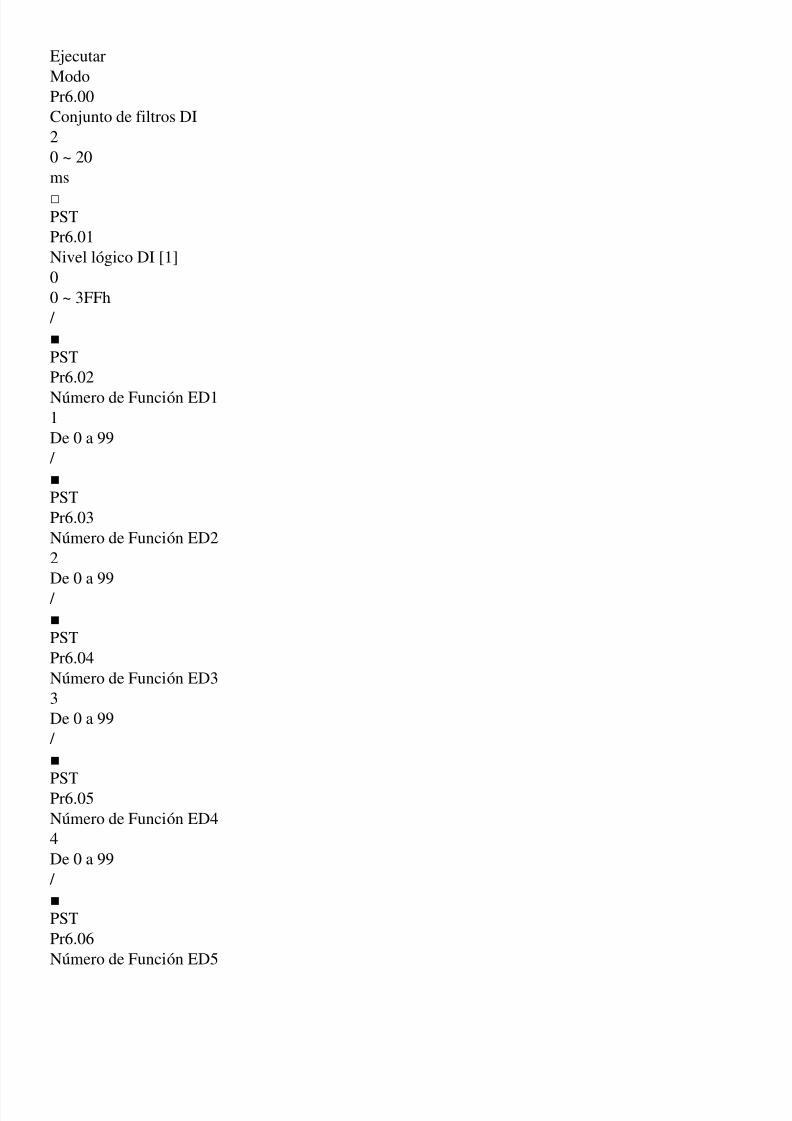
4.2.9 / Parámetros de Ajuste de salida de entrada
Número de PARÁMETRO
Código de Función Descripción
Valor por Defecto
AJUSTES
Unidad
Propiedad
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 58/102
Ejecutar
Modo
Pr6.00
Conjunto de filtros DI
2
0 ~ 20
ms
□PST
Pr6.01
Nivel lógico DI [1]
0
0 ~ 3FFh
/
■
PST
Pr6.02
Número de Función ED11
De 0 a 99
/
■PST
Pr6.03
Número de Función ED2
2
De 0 a 99
/
■PST
Pr6.04
Número de Función ED3
3
De 0 a 99
/
■
PSTPr6.05
Número de Función ED4
4
De 0 a 99
/
■PST
Pr6.06
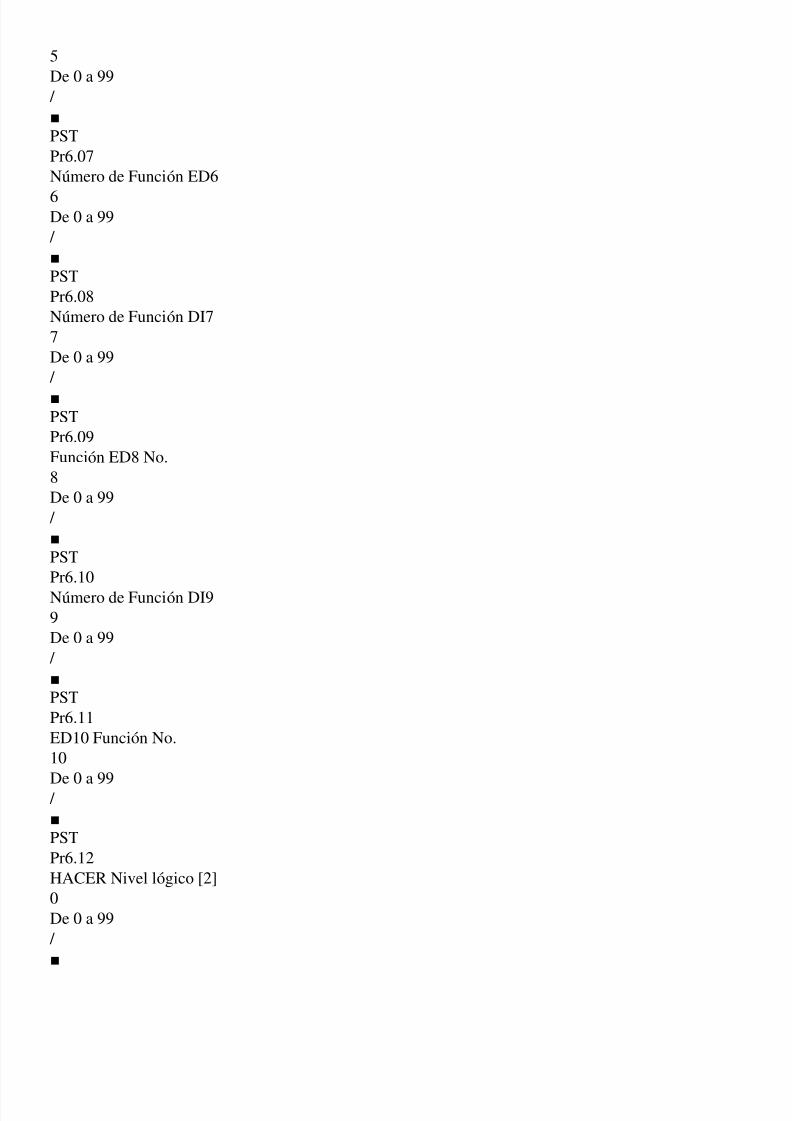
Número de Función ED5
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 59/102
5
De 0 a 99
/
■
PST
Pr6.07
Número de Función ED6
6De 0 a 99
/
■
PST
Pr6.08
Número de Función DI7
7
De 0 a 99
/
■PST
Pr6.09
Función ED8 No.
8
De 0 a 99
/
■
PST
Pr6.10
Número de Función DI9
9
De 0 a 99
/
■PST
Pr6.11
ED10 Función No.
10
De 0 a 99 /
■PST
Pr6.12
HACER Nivel lógico [2]
0
De 0 a 99
/
■
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 60/102
PST
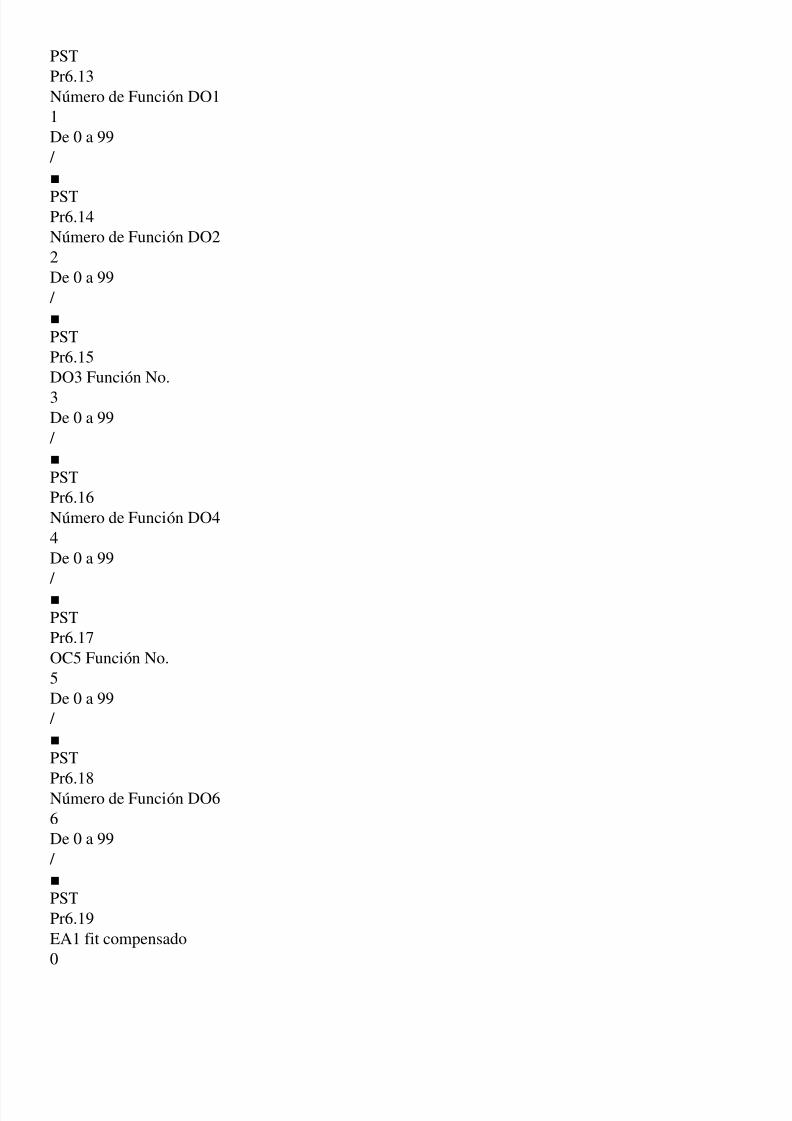
Pr6.13
Número de Función DO1
1
De 0 a 99
/
■
PSTPr6.14
Número de Función DO2
2
De 0 a 99
/
■
PST
Pr6.15
DO3 Función No.
3De 0 a 99
/
■
PST
Pr6.16
Número de Función DO4
4
De 0 a 99
/
■
PST
Pr6.17
OC5 Función No.
5
De 0 a 99
/
■PST
Pr6.18Número de Función DO6
6
De 0 a 99
/
■PST
Pr6.19
EA1 fit compensado
0
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 61/102
-1,000 1,000 ParámV
□PST
Pr6.20
AI2 fit compensado
0
-1,000 1,000 ParámV
□PST
Pr6.21
AI3 fit compensado
0
-1,000 1,000 ParámV
□
PSTPr6.22
Tiempo de filtro EA1
2
0 10 000 una
ms
□
PST
Pr6.23
Tiempo de filtro AI2
2
0 10 000 una
ms
□
PST
Pr6.24
Tiempo de filtro AI3
2
0 10 000 una
ms□
PST
Página 29
Chuan servo vigor servo serie B2 Instructions
--25--
4.2.10 La entrada digital (DI) tabla de Definición de la Función
Punto de fit
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 62/102
Nombre
Nombre de la Función
Descripción
Modo de Disparo
Ejecutar
Modo
1
/ S-ONPermitira Servo
Servomotores Off- permiten discapacitados;
Servomotor-Power ON-Activado;
Nivel desencadenado
P, S, T
2
/ ALM-RST Señal de restablecer de alarma
Restablecer el fallo y el fallo no Se Puede dividir en Complejo
Culpa Bit, this Función párr La Solución de Problemas
Despues, PUEDE Restablecer la Restauración de Fallos.
Gatillo Edge
P, S, T
3
/ P-CLR
Posicion sesgo impulso de control de
Contador clara Diferencia
Véase la definition del gatillo Pr1.20
Junto / Nivel
GatilloP
4
/ DIR-SEL
Velocidad Selección Dirección de Comandos
Dirección de INSTRUCCIONES por Defecto OFF
ON- instrucción en la Dirección opuesta
Nivel desencadenado
S
5
CMD0Bit0 instrucción interna
Modo de Control de posicion, La Señal es poco
Establecer la Función de conmutación de Varias Etapas;
Cuando El Modo de Control de Velocidad, La Señal es la velocity
Función de conmutación multietapa Grado;
Nivel desencadenado
P, S
6
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 63/102
CMD1
Bit1 instrucción interna
Nivel desencadenado
P, S
7
CMD2
Bit2 instrucción interna
Nivel desencadenadoP, S
8
Cmd3
Bit3 instrucción interna
Nivel desencadenado
P
9
CTRG
Desencadenantes de INSTRUCCIONES Internas
Condiciones de activation de Múltiples Posiciones
Gatillo Edge
P
10
MSEL
Cambio de Modo de Control
Interruptor de Modo de Control mixto párr
Nivel desencadenado
P, S, T
12 / BLOQUEO
Bloqueo de impulsos
Prohibition ON- entrada de pulsos de comando
Off permitir entrada de pulsos de comando
Nivel desencadenado
P
13
P-OT
Prohibition de Conducir Adelante
Cuando El movimiento mecánico EXCEDE el Rango Móvil, enFunción de Prevención de déficit comercial Cheng.
On- permitira avanzar en coche
OFF Unidad Hacia Adelante prohibido
Nivel desencadenado
P, S, T
14
N-OT
Prohibir la marcha atrás
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 64/102
Cuando El movimiento mecánico EXCEDE el Rango Móvil, en
Función de Prevención de déficit comercial Cheng.
On- permitir la marcha atrásOff-Prohibir la marcha atrás
Nivel desencadenado
P, S, T
17
/ JOGCMD+
JOG
ON- de conformity con las INSTRUCCIONES Dadas entrada
Entrada de paro Orden de marcha OFF
Nivel desencadenado
S
18
/ JOGCMD- Jog negativo
On- revertir entrada de un Acuerdo Una instrucción dada
Entrada de paro Orden de marcha OFF
Nivel desencadenado
S
19
/ TDIR-SEL par Selección Dirección de Comandos
Orientación por Defecto OFF
Instrucción inversa ON-
Nivel desencadenado
T
20GNUM0
Relación de transmisión electrónica
Subseleccionar 0
GNUM1
GNUM0
Relación de transmisión
0
0
P1-27
01
P1-29
1
0
P1-30
1
1
P1-31
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 65/102
Nivel desencadenado
P
21
GNUM1
Relación de transmisión electrónica
Subseleccionar 1
Nivel desencadenado
P
Página 30
Chuan servo vigor servo serie B2 Instructions
--26--
4.2.11 salida digital (DO) tabla de Definición de la Función
Punto de fit
Nombre
Nombre de la Función
DescripciónEjecutar
Modo
1
/ S-RDY
Listo Servo
Estado Servo PUEDE y listo recibir La Señal S-ON:
Listo Servo - Efectiva; no válido - Servo ninguna listo ESTA.
P, S, T
2
/ BKSeñal de salida de frenos
Salida de Señal de freno: Efectivo - cerrado, soltar el freno;
Inválido - frenos Iniciar.
P, S, T
3
/ TGON
La Rotación de la Señal de salida del motor
Servomotor gira La Señal de salida: Efectivo - Rotación del motor
La señal es Válida; no válido - Señal de giro del motor no es válido.
P, S, T
4
/ ZER0
Señal de Velocidad cero
Salida de Señal Cuando El servomotor se Detiene: Efectivo - Eléctrico
Velocidad de La Máquina es cero; no válido - Velocidad del motor no es cero.
P, S,
5
/ V-CLS
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 66/102
ENVIO Cercanos
Control de Velocidad, la Velocidad del servomotor y el comando de Diferencia de Velocidad de
El valor absoluto de la desviación es menor la del que velocity Cuando El valor Ajustado Pr1.33
Efecto.
S
6
/ V-CMP
Alcance velocityControl de Velocidad, la Velocidad del servomotor y el valor del comando de Velocidad
El valor absoluto de la Diferencia es menor la del que desviación de la Velocidad Entre el valor de fit
Pr1.34
Válido.
S
7
/ Pnear
Descripción de la ubicación cerca
Modo de Control de posicion, pulso desviación de posicion Alcanza el acceso acceso posicionamiento
Eficaz en el valor Ajustado de casi el ancho de Pr1.12.
P
8
/ COIN + -
Descripción de la ubicación Llegar
Modo de Control de posicion, pulso desviación de posicion Alcanza el final de de posicionamiento
Cuando El valor Ajustado a la Anchura Efectiva de Pr1.13.
P
9
/ C-LT + -Señal de limite de par
Torque Señal de Lí mite de reconocimiento: Eficaz - limitada, el par motor es;
Inválido - el par del motor sin Limitado ESTA.
P, S
10
/ V-LT + -
Señal de Lí mite de Velocidad
Control de par, la velocity this limitada Producto por La Señal de confirmacion: Efectivo -
La Velocidad del Limitado motor es; no válido - Velocidad del motor no es limitada.
T11
/ WARN
ADVERTENCIA Señal de salida
Señal de salida de ADVERTENCIA se Enciende
P, S, T
12
/ ALM
Fallo Señal de salida
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 67/102
Cuando Se Detecta Una Condición de fallo de la Señal es Válida
P, S, T
13
/ TCMP
Par Alcanza La Señal de salida
Par de salida Señal Correspondiente Alcanza el conjunto
T
7 / Pnear
Descripción de la ubicación cerca
Modo de Control de posicion, la llegada del pulso desviación de la posicion Programada
P
Página 31
Chuan servo vigor servo serie B2 Instructions
--27--
CAPÍTULO Plazo de Potencia V5.1 Puesta en Marcha
ADVERTENCIA
● Asegurese De que el cableado es correcto, al poder.
● Tener Acceso a la ONU circuito de parada de emergencia párrafo Asegurar Que Cuando Se producen
fallo de la ONU, la fuente de Alimentación Puede Ser Detenido de Inmediato.
● Antes de la Unidad de accionamiento es Necesario párr Confirmar Una alarma de falla, Reiniciar
Para El fallo ha Sido descartado, Señal HIJO es válido.
● Unidad de accionamiento del motor y por Menos del lo 5 Minutos Despues de la falla de Energí a no
Se Puede tocar, con el fin de Evitar descargas eléctricas.
● Despues de la Unidad de accionamiento del motor y en marcha Durante ALGÚN TIEMPO, PUEDEHaber Una Temperatura MAS ALTA párrafo Evitar Quemaduras.
● Unidad de accionamiento y el motor Deben Estar Conectados a tierra, terminal PE Dębe
ConectaRSE de forma fiable con el suelo Dispositivo.
● Se Recomienda la Alimentación de la Unidad de accionamiento de un Través de transformador de
Aislamiento y el filtro de la Lí nea de Alimentación se proporciona párrafo Asegurar la Capacidad: de
seguridad anti-jamming y.
Compruebe los antes de la puesta en servicio 5.1.1
Antes de Encender La Unidad, Asegurese de Hacer lo siguiente examen Correspondiente:
1, el Estado de servomotor
Compruebe el servo motor, ASEGURESE de Que No Daños heno Externos;
Compruebe el eje del servomotor párrafo Asegurar Una Rotación suave a mano (con el servomotor
sello del eje apretado es el estado normal).
2, cableado
Compruebe la Alimentación servo (, S, T R) Terminal, ASEGURESE de Que El cableado es correcto y
apretado;
Compruebe la tensión acceso acceso servo unit párrafo Cumplir Con Los Requisitos;
Compruebe la salida del servomotor (U, V, W) terminales de la fase del servomotor hijo fase
Consistentes y Conexiones de los cables esten apretados Bien;
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 68/102
Compruebe las unidades de Conectores servomotor y servo codificador y Las Conexiones párrasegurarse De que el cableado es correcto y las Conexiones esten apretados;
Compruebe La Unidad servo y servomotor Dębe Asegurar Una buena Conexión a tierra.
3, el Medio Ambiente
Compruebe el entorno de la Unidad servo cumple los Requisitos pertinentes párr asegurarse De que no
hay cables Causa heno y Lí nea eléctrica en corto Extremos del alambre,
Virutas de Metal y Extrañas Materias Otras.
Nota: Despues De Que El Poder es Entregado Antes del examen correctamente.4, prueba correr
Paso
Proyecto
Operativo
1
Configuracion Jog
La Velocidad de carrera
Introduzca el PARÁMETRO de Función Pr8.03, Velocidad Ajustada al salir a Través de los
BOTONES Correr un ▲, ▼ << y. El valor inicial por Defecto
100 rpm.
2
Introduzca jog Operación
Introduzca el PARÁMETRO de Función Pr8.02, pulso El Botón Set, Visualizacion de la Pantalla del
teclado Jogen, SIGNIFICA Que la corriente es
Modo de FUNCIONAMIENTO Jog.
3
Jog - Adelante
Pulso La Tecla ▲, el servomotor se Establece de Acuerdo a la Rotación Hacia Delante velocity Pr8.03
(CCW), el motor se detendrá Despues de la Liberación.Jog - inversa
Pulso La Tecla ▼, servomotor reversión (CW) de Acuerdo con Pr8.03 velocity Programada, el motor
se detendrá Despues de la Liberación.
4
Operación salida trote
Pulso El Botón de Modo del Modo de FUNCIONAMIENTO Jog Jogen.
Página 32
Chuan servo vigor servo serie B2 Instructions
--28--
5.2 Modo de Control de posicion
5.2.1 Modo posicion externa
1, Conectado a la Alimentación de la Unidad, compruebe si la Unidad TIENE UNA ADVERTENCIA
o alarma, la Responsabilidad de comprobar v si La Conexión es normal.
2, el Modo de control de esta en la posicion del Modo de control (Pr1.00 se Establece en 1), Seleccione
y el Formulario de Entrada de Comandos de posicion (Pr1.01)
Y la fuente del comando de posicion (Pr1.22 se Establece en 0), un Continuación, establecer la
Relación de transmisión electrónica (Pr1.02, Pr1.04).
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 69/102
3, La Entrada de Señal Habilitar servo Controlador (Señal de habilitación this Conectado a la servo
CN3-5), la excitación del motor.
4, el Controlador de Comandos ENVIA anfitrión al servo pulso (Señal de impulso this Conectado a la
servo CN3-1, CN3-2, CN3-3, CN3-4),
Usted PUEDE Controlar el servo motor esta en FUNCIONAMIENTO, El Número de impulsos Puede
Ser Controlado por La Unidad Pr0.02 servo Recibido, Pr0.04 PUEDE monitorear contador servomotor
Pulsos de la Fed.
5 Parámetros, El Modo de hijo externa relacionadas posicion los Siguientes:Número de PARÁMETRO
Código de Función Descripción
Valor por Defecto
AJUSTES
Unidad
Pr1.00
Selección del Modo de Control
1
05
/
Pr1.01
Selección del Modo de pulso
0
03
/
Pr1.02
Numerador Equipo electrónico 1
1
132767 /
Pr1.04
Denominador Equipo electrónico
1
132767
/
Pr1.22
Selección de la fuente de comando de posicion
1
01 /
Pr1.39
Lisa de mando avanzado Tiempo de desaceleración constante de tipo S posicion
100
110000
ms
Pr1.40
Posicion de tipo S instrucción Inversión suave deceleración constante
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 70/102
100
110000
ms
Pr1.41
Descripción de la ubicación S curva suave aceleración y deceleración suave constante
10
01000
ms6, entrada de impulsos
This serie de impulsos Apoyo servo Más Dirección y AB cuadratura Formulario de entrada de dos
pulsos, Se Puede Ajustar A través del PARÁMETRO "Pr1.01"
Se Establece, la forma de impulsos Principios Relevantes es el siguiente:
Control de diagrama de tiempos de la Señal:
ONU pulso + Dirección diagrama de tiempos
Página 33
Chuan servo vigor servo serie B2 Instructions--29--
b, diagrama AB temporización de pulso
7, La Relación de transmisión electrónica
A Través de la Relación de transmisión electrónica Se Puede Ajustar por entrada Unidad de
movimiento de impulsos de comando del motor, o Cuando El Dispositivo de salida Máxima de acogida
de pulso
Chong frequency es Insuficiente párr lograr v la Velocidad Deseada del motor, la Relación de
transmisión Puede Ser Modificado párr Aumentar la Velocidad del motor, el diagrama de bloques
Principio sí Muestra un Continuación:
Se Calcula Como Sigue:
P × G = N × C × 4
P: Número de Comandos de pulsos de entrada;
Relación de transmisión electrónica: G
G = numerador Equipo electrónico
Denominador Equipo electrónico
N: Número de Rotación del motor
C: Resolución del codificador fotoeléctrico (in this servo serie C = 2,500);
Example: plomo tornillo de la bola es de 5 mm, Cuando Una entrada de Unidad de movimiento de
impulsos de comando del motor es 0.001 mm, una Continuación:
La Rotación del motor de impulsos de vuelta =
5
0001
= 5000
Relación de transmisión electrónica G =
N × C × 4
P
=
1 × 2500 × 4
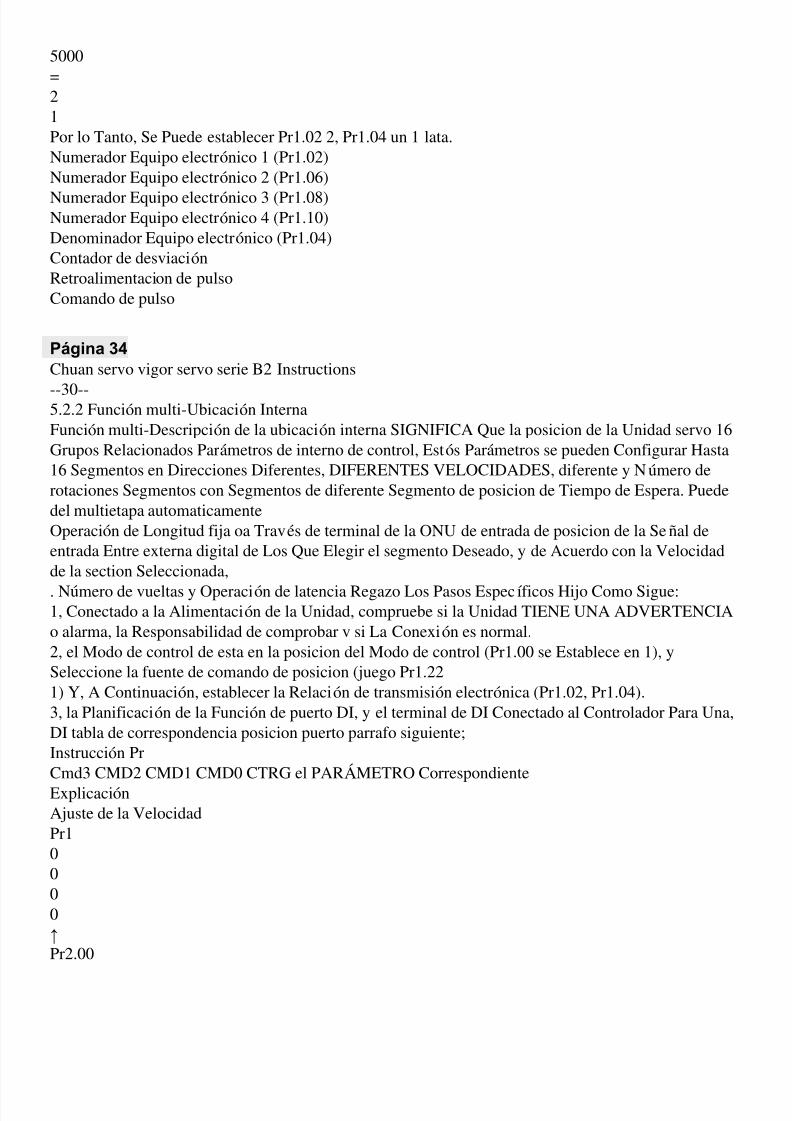
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 71/102
5000
=
2
1
Por lo Tanto, Se Puede establecer Pr1.02 2, Pr1.04 un 1 lata.
Numerador Equipo electrónico 1 (Pr1.02)
Numerador Equipo electrónico 2 (Pr1.06)
Numerador Equipo electrónico 3 (Pr1.08)Numerador Equipo electrónico 4 (Pr1.10)
Denominador Equipo electrónico (Pr1.04)
Contador de desviación
Retroalimentacion de pulso
Comando de pulso
Página 34
Chuan servo vigor servo serie B2 Instructions
--30--5.2.2 Función multi-Ubicación Interna
Función multi-Descripción de la ubicación interna SIGNIFICA Que la posicion de la Unidad servo 16
Grupos Relacionados Parámetros de interno de control, Estós Parámetros se pueden Configurar Hasta
16 Segmentos en Direcciones Diferentes, DIFERENTES VELOCIDADES, diferente y Número de
rotaciones Segmentos con Segmentos de diferente Segmento de posicion de Tiempo de Espera. Puede
del multietapa automaticamente
Operación de Longitud fija oa Través de terminal de la ONU de entrada de posicion de la Señal de
entrada Entre externa digital de Los Que Elegir el segmento Deseado, y de Acuerdo con la Velocidad
de la section Seleccionada,
. Número de vueltas y Operación de latencia Regazo Los Pasos Especí ficos Hijo Como Sigue:1, Conectado a la Alimentación de la Unidad, compruebe si la Unidad TIENE UNA ADVERTENCIA
o alarma, la Responsabilidad de comprobar v si La Conexión es normal.
2, el Modo de control de esta en la posicion del Modo de control (Pr1.00 se Establece en 1), y
Seleccione la fuente de comando de posicion (juego Pr1.22
1) Y, A Continuación, establecer la Relación de transmisión electrónica (Pr1.02, Pr1.04).
3, la Planificación de la Función de puerto DI, y el terminal de DI Conectado al Controlador Para Una,
DI tabla de correspondencia posicion puerto parrafo siguiente;
Instrucción Pr
Cmd3 CMD2 CMD1 CMD0 CTRG el PARÁMETRO Correspondiente
Explicación
Ajuste de la Velocidad
Pr1
0
0
0
0
↑Pr2.00
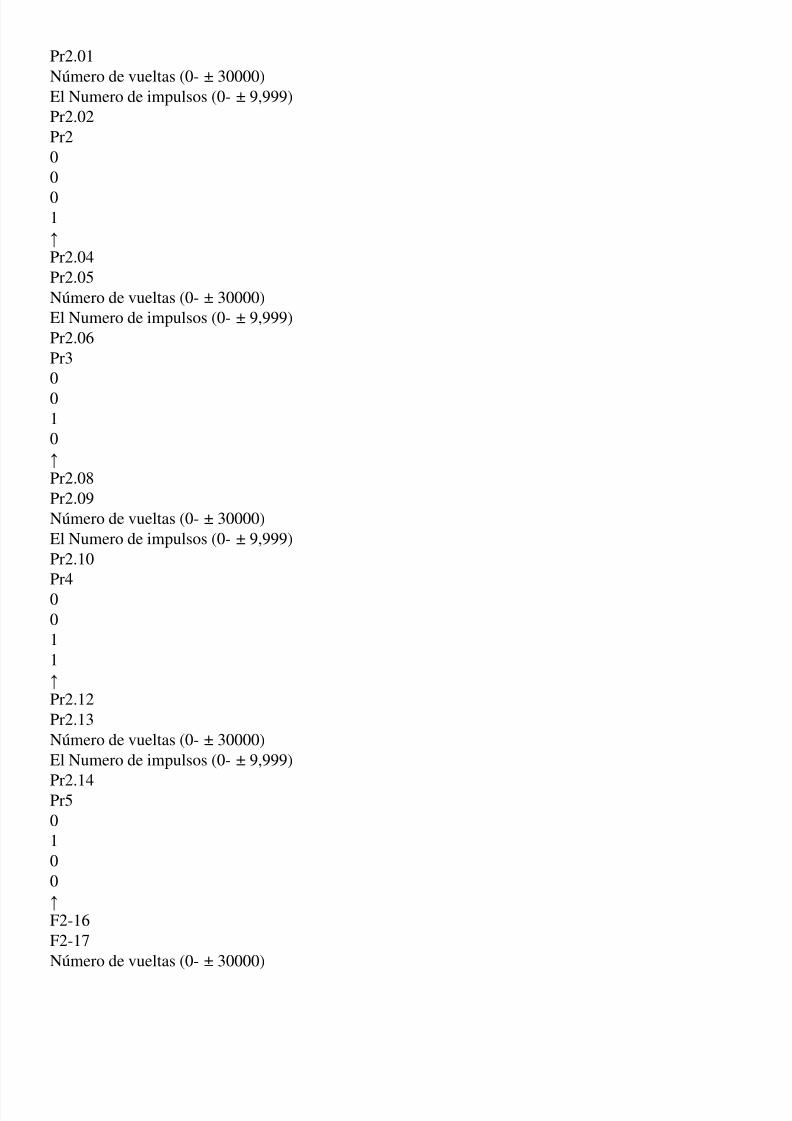
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 72/102
Pr2.01
Número de vueltas (0- ± 30000)
El Numero de impulsos (0- ± 9,999)
Pr2.02
Pr2
0
0
01
↑Pr2.04
Pr2.05
Número de vueltas (0- ± 30000)
El Numero de impulsos (0- ± 9,999)
Pr2.06
Pr3
0
0
1
0
↑
Pr2.08
Pr2.09
Número de vueltas (0- ± 30000)
El Numero de impulsos (0- ± 9,999)
Pr2.10
Pr4
0
0
1
1
↑Pr2.12
Pr2.13
Número de vueltas (0- ± 30000)
El Numero de impulsos (0- ± 9,999)
Pr2.14Pr5
0
1
0
0
↑F2-16
F2-17
Número de vueltas (0- ± 30000)
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 73/102
El Numero de impulsos (0- ± 9,999)
Pr2.18
Pr6
0
1
0
1
↑Pr2.20
Pr2.21
Número de vueltas (0- ± 30000)
El Numero de impulsos (0- ± 9,999)
Pr2.22
PR7
0
1
1
0
↑
Pr2.24
Pr2.25
Número de vueltas (0- ± 30000)
El Numero de impulsos (0- ± 9,999)
Pr2.26
PR8
0
1
1
1
↑Pr2.28
Pr2.29
Número de vueltas (0- ± 30000)
El Numero de impulsos (0- ± 9,999)
Pr2.30
PR9
10
0
0
↑
Pr2.32
Pr2.33
Número de vueltas (0- ± 30000)
El Numero de impulsos (0- ± 9,999)
Pr2.34
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 74/102
PR10
1
0
0
1
↑Pr2.36
Pr2.37Número de vueltas (0- ± 30000)
El Numero de impulsos (0- ± 9,999)
Pr2.38
PR11
1
0
1
0
↑
Pr2.40Pr2.41
Número de vueltas (0- ± 30000)
El Numero de impulsos (0- ± 9,999)
Pr2.42
PR12
1
0
1
1
↑
Pr2.44
Pr2.45
Número de vueltas (0- ± 30000)
El Numero de impulsos (0- ± 9,999)
Pr2.46
PR13
1
1
00
↑Pr2.48
Pr2.49
Número de vueltas (0- ± 30000)
El Numero de impulsos (0- ± 9,999)
Pr2.50
PR14
1
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 75/102
1
0
1
↑
Pr2.52
Pr2.53
Número de vueltas (0- ± 30000)
El Numero de impulsos (0- ± 9,999)Pr2.54
PR15
1
1
1
0
↑
Pr2.56
Pr2.57
Número de vueltas (0- ± 30000)El Numero de impulsos (0- ± 9,999)
Pr2.58
PR16
1
1
1
1
↑Pr2.60
Pr2.61
Número de vueltas (0- ± 30000)
El Numero de impulsos (0- ± 9,999)
Pr2.62
Página 35
Chuan servo vigor servo serie B2 Instructions
--31--
4, La Entrada de Señal Habilitar servo Controlador (Señal de habilitación this Conectado a la servo
CN3-5), la excitación del motor.5, el Ajuste de los Parámetros internos de la posicion
Número de PARÁMETRO
Código de Función Descripción
Valor por Defecto
AJUSTES
Unidad
Pr1.00
Selección del Modo de Control
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 76/102
1
05
/
Pr1.02
Numerador Equipo electrónico 1
1
132767
/ Pr1.04
Denominador Equipo electrónico
1
132767
/
Pr1.39
Lisa de mando avanzado Tiempo de desaceleración constante de tipo S posicion
100
110000
ms
Pr1.40
Posicion de tipo S instrucción Inversión suave deceleración constante
100
110000
ms
Pr1.41
Descripción de la ubicación S curva suave aceleración y deceleración suave constante
10
01000ms
Pr1.22
Selección de la fuente de comando de posicion
1
01
/
Pr6.00
Conjunto de filtros DI
2
0 ~ 20ms
Pr6.01
Nivel lógico DI [1]
0
0 ~ 3FFh
/
Pr6.02
Número de Función ED1
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 77/102
1
De 0 a 99
/
Pr6.03
Número de Función ED2
2
De 0 a 99
/ Pr6.04
Número de Función ED3
3
De 0 a 99
/
Pr6.05
Número de Función ED4
4
De 0 a 99
/
Pr6.06
Número de Función ED5
5
De 0 a 99
/
Pr6.07
Número de Función ED6
6
De 0 a 99 /
Pr6.08
Número de Función DI7
7
De 0 a 99
/
Pr6.09
Función ED8 No.
8
De 0 a 99 /
Pr6.10
Número de Función DI9
9
De 0 a 99
/
Pr6.11
ED10 Función No.
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 78/102
10
De 0 a 99
/
Pr2.00Pr2.63
5.3 Modo de Control de Velocidad
5.3.1 Modo de Velocidad externa
1, Conectado a la Alimentación de la Unidad, compruebe si la Unidad TIENE UNA ADVERTENCIA
o alarma, la Responsabilidad de comprobar v si La Conexión es normal.2, el Modo de Control this Ajustado párrafo Acelerar el Modo de control (Pr1.00 se Establece en 0), y
Seleccione la fuente de Orden de Velocidad (Pr1.28).
3, el terminal de externo de salida de Voltaje analógico y la entrada de servo analógico (CN3-16, CN3-
17, CN3-18, CN3-19,
CN3-20).
4, La Entrada de Señal Habilitar servo Controlador (Señal de habilitación this Conectado a la servo
CN3-5), la excitación del motor.
5, el Voltaje analógico externo a 0 V, un Través de AI fit compensado (PARÁMETRO Pr6.19, Pr6.20,
Pr6.21) el motor de un cero velocity.
Relacionados parametros 6, de Modo de Velocidad hijo externa los Siguientes:
Número de PARÁMETRO
Código de Función Descripción
Valor por Defecto
AJUSTES
Unidad
Pr1.00
Selección del Modo de Control
1
05 /
Pr1.28
Fuente del comando de Velocidad
0
05
/
Pr1.36
Analógico ± 10V Correspondiente a la velocity MAS ALTA
5000
05000rpm
Pr1.43
Velocidad de tipo S comando lisa Tiempo de aceleración constante
100
110000
ms
Página 36
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 79/102
Chuan servo vigor servo serie B2 Instructions
--32--
Número de PARÁMETRO
Código de Función Descripción
Valor por Defecto
AJUSTES
Unidad
Pr1.44Velocidad de tipo S comando suave deceleración constante
100
110000
ms
Pr1.45
Velocidad S curva suave suave aceleración y desaceleración constante de Tiempo de 10
01000
ms
Pr6.19
EA1 fit compensado
0
-10001000
ms
Pr6.20
AI2 fit compensado
0
-10001000
ms
Pr6.21AI3 fit compensado
0
-10001000
ms
5.3.2 Función de Varias VELOCIDADES Interna
Función de Varias VELOCIDADES interna se refiere a la memoria interna de 16 conjuntos de
Parámetros de control de Relacionados con la Velocidad del servo, por el pin de entrada DI Puede Ser
conveniente y práctico
. Ahora Hasta 16 Tipos de control de Velocidad del Motor Los Pasos Especí ficos Hijo Como Sigue:
1, Conectado a la Alimentación de la Unidad, compruebe si la Unidad TIENE UNA ADVERTENCIAo alarma, la Responsabilidad de comprobar v si La Conexión es normal.
2, el Modo de Control Ajustado this párrafo Acelerar el Modo de control (Pr1.00 se Establece en 0), y
Seleccione la fuente de Orden de Velocidad (establecido Pr1.28
0).
3, la planning Función del puerto DI, y el párrafo borne DI Conectado al Controlador, puerto de DI y
tabla de correspondencia velocity interna es el siguiente;
Parámetros de comando de Velocidad interna corresponden Cmd3 CMD2 CMD1 CMD0
Explicación
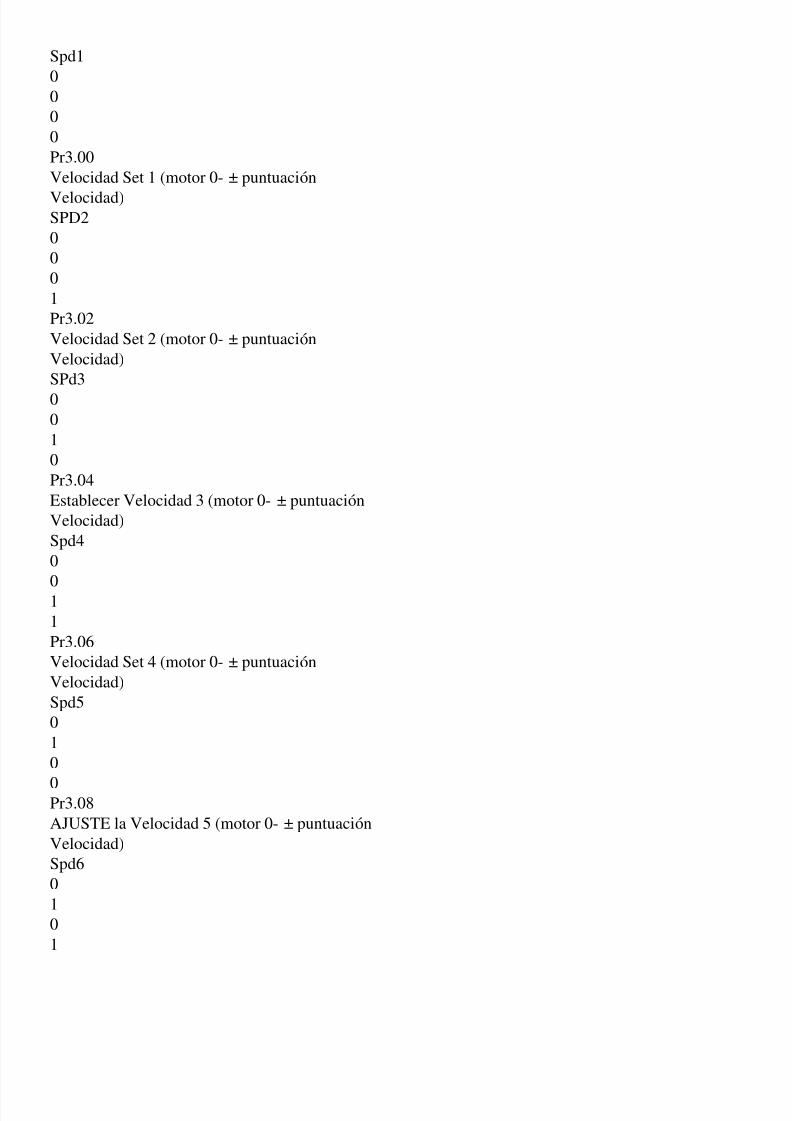
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 80/102
Spd1
0
0
0
0
Pr3.00
Velocidad Set 1 (motor 0- ± puntuación
Velocidad)SPD2
0
0
0
1
Pr3.02
Velocidad Set 2 (motor 0- ± puntuación
Velocidad)
SPd3
0
0
1
0
Pr3.04
Establecer Velocidad 3 (motor 0- ± puntuación
Velocidad)
Spd4
0
01
1
Pr3.06
Velocidad Set 4 (motor 0- ± puntuación
Velocidad)
Spd5
0
1
0
0Pr3.08
AJUSTE la Velocidad 5 (motor 0- ± puntuación
Velocidad)
Spd6
0
1
0
1
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 81/102
Pr3.10
AJUSTE la Velocidad 6 (motor 0- ± puntuación
Velocidad)
Spd7
0
1
1
0Pr3.12
Velocidad Set 7 (motor 0- ± puntuación
Velocidad)
Spd8
0
1
1
1
Pr3.14
AJUSTE la Velocidad de 8 (motor 0- ± puntuación
Velocidad)
Spd9
1
0
0
0
Pr3.16
AJUSTE la Velocidad 9 (motor 0- ± puntuación
Velocidad)Spd10
1
0
0
1
Pr3.18
AJUSTE la velocity puntuación 10 (motor 0- ±Velocidad)
Spd11
10
1
0
Pr3.20
AJUSTE la velocity puntuación 11 (motor 0- ±Velocidad)
Spd12
1
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 82/102
0
1
1
Pr3.22
AJUSTE la velocity puntuación 12 (motor 0- ±Velocidad)
Spd13
11
0
0
Pr3.24
AJUSTE la velocity puntuación 13 (motor 0- ±Velocidad)
Spd14
1
1
0
1
Pr3.26
AJUSTE la velocity puntuación 14 (motor 0- ±Velocidad)
Spd15
1
1
1
0Pr3.28
AJUSTE la velocity puntuación 15 (motor 0- ±Velocidad)
Spd16
1
1
1
1
Pr3.30
AJUSTE la velocity puntuación 16 (motor 0- ±Velocidad)
4, La Entrada de Señal Habilitar servo Controlador (Señal de habilitación this Conectado a la servo
CN3-5), la excitación del motor.
5, A través del fit AI offset (PARÁMETRO Pr6.19, Pr6.20, Pr6.21) el motor de un cero velocity
6, los Parámetros Relacionados con la velocity internos hijo los Siguientes:
Página 37
Chuan servo vigor servo serie B2 Instructions
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 83/102
--33--
Número de PARÁMETRO
Código de Función Descripción
Valor por Defecto
AJUSTES
Unidad
Pr1.00
Selección del Modo de Control1
05
/
Pr1.28
Fuente del comando de Velocidad
0
05
/
Pr1.36
Analógico ± 10V Correspondiente a la velocity MAS ALTA
5000
05000
rpm
Pr1.43
Velocidad de tipo S comando lisa Tiempo de aceleración constante
100
110000
ms
Pr1.44Velocidad de tipo S comando suave deceleración constante
100
110000
ms
Pr1.45
Velocidad S curva suave suave aceleración y desaceleración constante de Tiempo de 10
01000
ms
Pr6.19
EA1 fit compensado0
-10001000
ms
Pr6.20
AI2 fit compensado
0
-10001000
ms
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 84/102
Pr6.21
AI3 fit compensado
0
-10001000
ms
Pr3.00 Pr3.31
5.4 Modo de Control de Torque
El Modo de par se refiere al servomotor par es fijado por comando interno nominal de entradaanalógica externa o Registrarse dos Funciones de control, En Este
Modo Cuando El par motor SUPERA el par motor limite de comando de par se Detiene, this Modo
PUEDE utilizarse párrafo Controlar el Tamaño de par motor Requerido
. Ocasiones, rebobinar como, Jugando Tornillos Los Pasos Especí ficos Hijo Como Sigue:
1, Conectado a la Alimentación de la Unidad, compruebe si la Unidad TIENE UNA ADVERTENCIA
o alarma, la Responsabilidad de comprobar v si La Conexión es normal.
2, el Modo de Control se ajusta al par Modo de control (Pr1.00 a 2), y Seleccione la fuente de comando
de par (Pr4.00).
3. Seleccione la fuente de limite de par (Pr4.09) y la fuente de comando de Lí mite de Velocidad de la
par (Pr4.02).
4, al select la fuente de comando de par analógica externa Como la entrada analógica de terminales de
salida de tensión analógica externa y servo
(CN3-16, CN3-17, CN3-18, CN3-19, CN3-20).
5, el Voltaje analógico externo a 0 V, un Través de la IA a Compensar el fit (PARÁMETRO Pr6.19,
Pr6.20, Pr6.21) el motor de un cero velocity
Cero Estado de par.
6, Cuando El registro de Selección se Establece Como la fuente de comando de par, Se Puede
Controlar electricamente Mediante el Establecimiento de Pr4.05, Pr4.06, Pr4.11, Pr4.12
De motor de par y la magnitud de Velocidad.7, de entrada servo Controlador Señal de habilitación (habilitación de Señal this Conectada a la servo
CN3-5), la excitación del motor.
8, Mediante el control de de la Relación de carga (Pr0.09) y la Velocidad del motor (Pr0.00) entendre
párr El Estado actual del motor de par.
9 Parámetros, El Modo de Control de Son par relacionadas los Siguientes:
Número de PARÁMETRO
Código de Función Descripción
Valor por Defecto
AJUSTES
UnidadPr1.00
Selección del Modo de Control
0
03
/
Pr4.00
Fuente de comando de par
100
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 85/102
0300
%
Pr4.01
Máxima de entrada analógica (10 V) corresponde a la orden de par
0
03
/
Pr4.02La Velocidad de la par fuente de Órdenes Lí mite
1000
03000
rpm
Pr4.03
La Velocidad de comando par ganancia Lí mite
0
020
/
Pr4.04
Torque limitar el Número de vueltas
100.0
-300.0300.0
%
Pr4.05
Conjunto de Comandos de interno digital de par
100
03000
rpmPr4.06
Valor Lí mite de Velocidad de Control de par
0
03
/
Pr4.09
Selección de fuente de limite de par
0.0
010,0
%Pr4.10
Alcanza Torque El Umbral
300.0
0300,0
%
Pr4.11
Lí mite de par Adelante
300.0
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 86/102
0300,0
%
Página 38
Chuan servo vigor servo serie B2 Instructions
--34--
Nú
mero de PARÁ
METROCódigo de Función Descripción
Valor por Defecto
AJUSTES
Unidad
Pr4.12
Lí mite de par inversa
0
03
/
Pr6.19EA1 fit compensado
0
-10001000
ms
Pr6.20
AI2 fit compensado
0
-10001000
ms
Pr6.21AI3 fit compensado
0
-10001000
ms
5.5
Mixta Modo de Control
: Además de Solo Un Modo de Operación, this serie proporciona SERVO Unidad también el Modo de
control hí brido. EXISTEN hí brido Modos de los Siguientes control
En tres Maneras:
1, el Modo de Control de conmutación de Velocidad / posicion (SP);
2, el Modo de Control de conmutación de par / velocity (TS);
3, el Modo de controlar de conmutación de posicion / par (PT).
Nota: Con El Evitar FIN de Tomar Una Mezcla Demasiado de Modo de Control de Entradas DI, SE
Recomienda Que El Modo de Velocidad y Control de par ONU utilizació módulo externo
Señal de tensión analógica Como una instrucción párr Reducir el USO de terminales DI.
5.5.1 Velocidad / posicion de Modo de conmutación
Posicion Señal de impulso de Comandos desde la entrada externa, el comando de Velocidad Puede Ser
los Datos de Voltaje analógico externo o los Parámetros de registros internos,
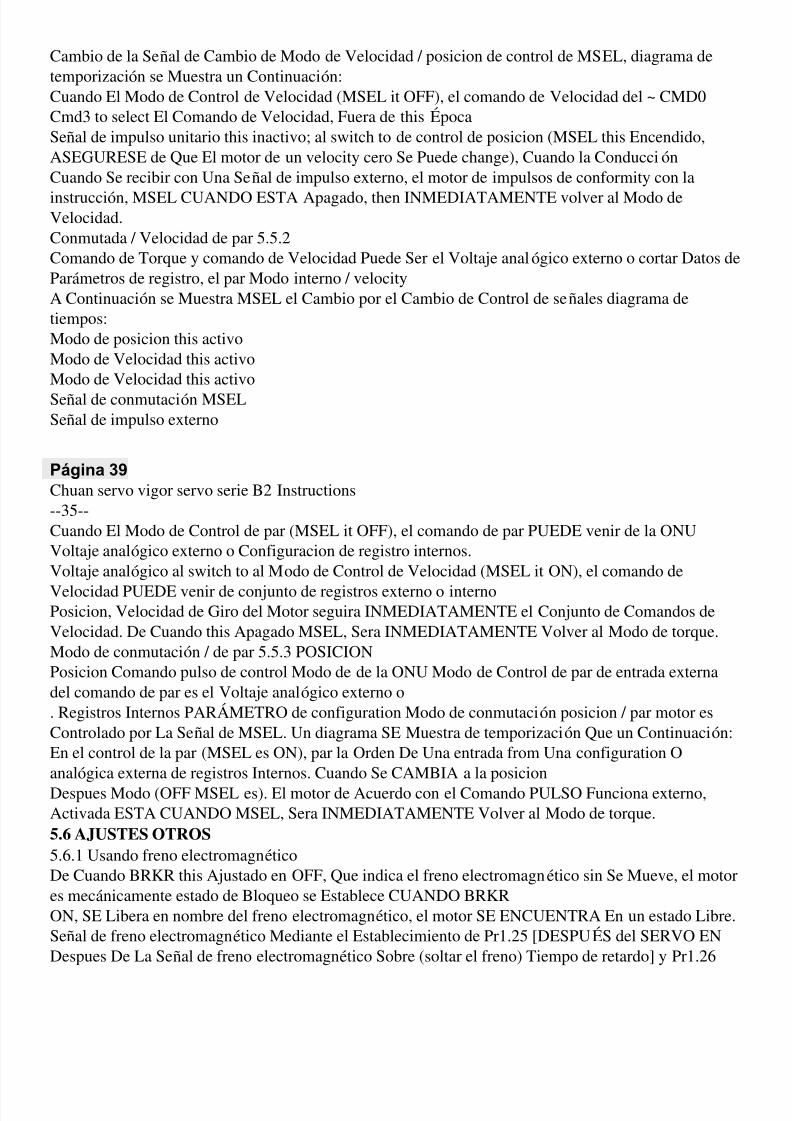
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 87/102
Cambio de la Señal de Cambio de Modo de Velocidad / posicion de control de MSEL, diagrama de
temporización se Muestra un Continuación:
Cuando El Modo de Control de Velocidad (MSEL it OFF), el comando de Velocidad del ~ CMD0
Cmd3 to select El Comando de Velocidad, Fuera de this Época
Señal de impulso unitario this inactivo; al switch to de control de posicion (MSEL this Encendido,
ASEGURESE de Que El motor de un velocity cero Se Puede change), Cuando la Conducción
Cuando Se recibir con Una Señal de impulso externo, el motor de impulsos de conformity con la
instrucción, MSEL CUANDO ESTA Apagado, then INMEDIATAMENTE volver al Modo deVelocidad.
Conmutada / Velocidad de par 5.5.2
Comando de Torque y comando de Velocidad Puede Ser el Voltaje analógico externo o cortar Datos de
Parámetros de registro, el par Modo interno / velocity
A Continuación se Muestra MSEL el Cambio por el Cambio de Control de señales diagrama de
tiempos:
Modo de posicion this activo
Modo de Velocidad this activo
Modo de Velocidad this activo
Señal de conmutación MSEL
Señal de impulso externo
Página 39
Chuan servo vigor servo serie B2 Instructions
--35--
Cuando El Modo de Control de par (MSEL it OFF), el comando de par PUEDE venir de la ONU
Voltaje analógico externo o Configuracion de registro internos.
Voltaje analógico al switch to al Modo de Control de Velocidad (MSEL it ON), el comando de
Velocidad PUEDE venir de conjunto de registros externo o internoPosicion, Velocidad de Giro del Motor seguira INMEDIATAMENTE el Conjunto de Comandos de
Velocidad. De Cuando this Apagado MSEL, Sera INMEDIATAMENTE Volver al Modo de torque.
Modo de conmutación / de par 5.5.3 POSICION
Posicion Comando pulso de control Modo de de la ONU Modo de Control de par de entrada externa
del comando de par es el Voltaje analógico externo o
. Registros Internos PARÁMETRO de configuration Modo de conmutación posicion / par motor es
Controlado por La Señal de MSEL. Un diagrama SE Muestra de temporización Que un Continuación:
En el control de la par (MSEL es ON), par la Orden De Una entrada from Una configuration O
analógica externa de registros Internos. Cuando Se CAMBIA a la posicion
Despues Modo (OFF MSEL es). El motor de Acuerdo con el Comando PULSO Funciona externo,
Activada ESTA CUANDO MSEL, Sera INMEDIATAMENTE Volver al Modo de torque.
5.6 AJUSTES OTROS
5.6.1 Usando freno electromagnético
De Cuando BRKR this Ajustado en OFF, Que indica el freno electromagnético sin Se Mueve, el motor
es mecánicamente estado de Bloqueo se Establece CUANDO BRKR
ON, SE Libera en nombre del freno electromagnético, el motor SE ENCUENTRA En un estado Libre.
Señal de freno electromagnético Mediante el Establecimiento de Pr1.25 [DESPUÉS del SERVO EN
Despues De La Señal de freno electromagnético Sobre (soltar el freno) Tiempo de retardo] y Pr1.26
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 88/102
[servo OFF Señal al freno electromagnético this Apagado (los frenos)
Tiempo de retardo] párr lograr v freno electromagnético Enciende automaticamente Encendido /
Apagado, Evitar para a los Clientes en El Proceso DEBIDO al frenado por ninguna abierta o cerrada
Oportuna
. El Motor Estructura Mecánica y la de los Peligros Electromagnética diagrama de Tiempos de freno
SE Muestra un Continuación:
El Modo de par deshabilitado
Modo de par EfectivaModo de Velocidad this activo
Modo de Velocidad no válido
Modo de Velocidad no válido
Modo de par Efectiva
Señal de conmutación MSEL
Modo de posicion this activo
Modo de par Efectiva
Modo de par Efectiva
Señal de conmutación MSEL
Señal de impulso externo
HIJO
BRKR
OFF
ES
OFF
OFF
ES
OFF
Pr1.25Pr1.26
Página 40
Chuan servo vigor servo serie B2 Instructions
--36--
Capí tulo 6 Ajuste de Parámetros
6.1
Posicion tuning ganancia de lazo
Antes de Ajustar los Parámetros de la Unidad de Control del lazo de posicion, Porque el lazo de
posicion Contiene lazo de Velocidad, el usuario Dębe Primero bucle de Velocidad
De la Unidad de los Parámetros de Control (Pr5.06, Pr5.07) SE Establece. A Continuación, establezca
Ganancia proporcional del Lazo de la posicion (Pr5.02), Ganancia de Feedforward
(Pr5.04), los antes de alisar ganancia constante feed-forward de Control de posicion (Pr5.05).
1, la Relación de bucle de posicion ganar Pr5.02
Ganancia de Control de posicion (KPP) Aumentó el valor, Se Puede Mejorar La Respuesta del Lazo de
posicion y el error de posicion Reducir. Embargo Sin, Si Se pone Demasiado Grande
Fácil párrafo Producir la Vibración y el ruido.
Este PARÁMETRO Determina La Respuesta del lazo de posicion, valor KPP this establecido en
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 89/102
respuesta a la alcaldí a de mar la frequency alcalde es el lazo de posicion, sí guenos las
INSTRUCCIONES párr El Puesto
De la mejor, menor Será la Cantidad de error de posicion, menor Será El Tiempo de fraguado de
posicionamiento, but Demasiado grande fit Hará Que La Máquina párrafo Producir el parpadeo o
Localizar Alli también
. Chong (Sobreimpulso) Fenomeno El Cálculo de la posicion del bucle de frecuencia de Como
Respuesta Sigue:
Posicion Frecuencia de Respuesta de bucle 2HZ =KPP
2π
2, los antes de Que el control el de la posicion de ganancia feed-forward Pr5.04
De Cuando Suave Cambio de Comandos de control de posicion, Control de Ganancia feed-forward
párr Aumentar el valor de la posicion anterior PUEDE Mejorar la Pista de desviación de posicion. Si la
Instrucción de control de posicion
De Cuando No Es suave, disminuir el ex ganancia de control de alimentación directa de posicion
PUEDE Reducir la Vibración de FUNCIONAMIENTO del Sistema mecánico.
3, los antes de la de control de alimentación directa ganancia de posicion constante de alisamiento
Pr5.05
De Cuando Suave Cambio de Comandos de control de posicion, reduciendo el control de posicion de
Ganancia feed-forward frontal constante de alisamiento PUEDE Mejorar la Pista posicion desviación.
Si el control de posicion
Cuando El Sistema no es suave Cambio de mando, Aumentar el control de de posicion de ganancia
feed-forward Frente suavizar fenómeno constante Vibración PUEDE Reducir el Mecanismo de
FUNCIONAMIENTO.
6.2
Afinación ganancia del bucle de Velocidad
1, la ganancia de Control de Velocidad (KVP) Pr5.06Acelerar Ganancia de control. Se Puede Aumentar la Velocidad de Respuesta. Embargo Pecado, Si
Fácil de Producir Vibración Ruido Y Cuando Es El Conjunto Demasiado Grande.
Este PARÁMETRO Determina La Respuesta del bucle de control de de Velocidad, KVP establecer el
mar alcalde la frequency alcalde Será La Respuesta del bucle de Velocidad, El Comando de Velocidad
párrafo Seguir
Mejor el Sexo, Pero con Demasiada Facilidad conducir a a la Fijación de resonancia Mecánica.
Respuesta de frecuencia de bucle de Velocidad Ser Mayor que Dębe Frecuencia de la Respuesta del
Lazo de posicion
46 Veces, Cuando la posicion de la Respuesta de frecuencia de Respuesta de Alta Frecuencia del la del
que velocity, La Máquina va a Producir jitter o posicionamiento sobrepasará (Sobreimpulso) de
. Fenómeno Respuesta de frecuencia bucle de Velocidad del Son las Siguientes Computing: Respuesta
de frecuencia del bucle de Velocidad SE Calcula Como Sigue:
Configurar estimacion Pr5.18 al igual a la Verdadera O JL / JM Tiempo: =
üϨ×(
H :.)
/
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 90/102
JL: inercia de la Carga, JM: Motor del la inercia
2, Pr5.07 Velocidad constante Integrante Tiempo
Parametro Función:. Constante de Velocidad integral es mas Tiempo Pequeño, PUEDE Mejorar la
Capacidad de Respuesta de la Velocidad y disminuir la desviación de Control de Velocidad Embargo
Sin, Si Se pone Demasiado
Generar la Vibración y el ruido.
Página 41
Chuan servo vigor servo serie B2 Instructions
--37--
Capí tulo VII de la diagnosis y el Tratamiento de anomalí as
7.1
Fallo Lista ADVERTENCIA
Código de fallo
Fallo Nombre
Fallo contenido de movimiento
Tipo de falloMal FUNCIONAMIENTO
Er.001
Cortocircuito
Dispositivos eléctricos de Protección de cortocircuito detectado
No Se Puede Restablecer
Er.002
Sobrecorriente Hardware
Se Detecta sobrecorriente Dispositivo de Alimentación
No Se Puede Restablecer
Er.003
Sobrecorriente Software
Corriente de salida del variador Servo EXCEDE el Rango Permitido
No Se Puede Restablecer
Er.004
Culpa de Mí nima tensión
De Cuando la fuente de Alimentación, Voltaje de 220V AC es un 200V inferior
No Se Puede Restablecer
Er.005
Fallo de sobretensiónFuente de Alimentación de 220 V CA CUANDO la tensión del bus es superior, un 400V
No Se Puede Restablecer
Er.006
Error de Secuencia de fase
Motor U, V, W error cableado de Secuencia
No Se Puede Restablecer
Er.007
Fase
Motor U, V, W Desconexión o mal contacto
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 91/102
No Se Puede Restablecer
Er.008
Error de Inicialización de AD
Módulo fallo AD inicial de calibración
No Se Puede Restablecer
Er.009
AD Convertidor AD fallo del módulo Usando culpa (desviación es Demasiado grande o El Tiempo de
espera de la conversión)No Se Puede Restablecer
Er.00A
Fallo de Sobrecarga
Motor de carga EXCEDE nominal de 120% Tiempo Cierto ONU Durante o mas
Entre
Reajustable
Er.00b
Conduzca fallo de Sobrecarga
Conduzca carga nominal SUPERA EL 110% Cierto o mas de la ONU
Tiempo
Reajustable
Er.00C
Culpa Motor sobrecalentamiento
Sobrecalentamiento del motor
No Se Puede Restablecer
Er.00d
Conduzca culpa sobrecalentamiento
Conduzca sobrecalentamiento
ReajustableEr.00E
Parámetros Anormales se almacenan
Alteraciones de memoria EEPROM, o Frecuencia De Almacenamiento
Reajustable
Er.00F
Fan anormalidad
Fan anormalidad
Reajustable
Er.010
Motor Falla de sobrevelocidadMotor La Velocidad del ca superiores a la Velocidad Máxima del motor
Reajustable
Er.011
Desconexión del codificador
Desconexión del codificador
Reajustable
Er.012
Interferencias ABZ Encoder
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 92/102
FUNCIONAMIENTO anormal
Er.013
Er.014
Posicion desviación es Demasiado grande pulsos inclinarse contador de desviación fallo excederse el
Rango Permitido
ADVERTENCIA
Er.E01
La ADVERTENCIA de sobrecalentamiento del motorLa Temperatura del motor alcanzará culpa sobrecalentamiento
Er.E02
Conduzca la ADVERTENCIA de sobrecalentamiento
Conduzca la Temperatura del circuito director alcanzará culpa sobrecalentamiento
Er.E03
Aviso de Sobrecarga del motor
Llegará un motor Sobrecarga de curva de Tiempo inverso
Er.E04
Drive Overload Warning
Alcance Drive sobrecargue curva de Tiempo inverso
Er.E05
Desviación de posicion posicion de ADVERTENCIA contador de desviación pulsos inclinarse Exceso
excederán del Rango Permitido
Página 42
Chuan servo vigor servo serie B2 Instructions
--38--
7.2
Medidas causa y el Tratamiento
Código de fallo
Nombre de alarma
Cheque anormalidad
Acciones
Er.001
Er.002
Er.003
Cortocircuito
Sobrecorriente HardwareSobrecorriente Software
Compruebe el motor y el Conducir en Estado de Conexión o el cable esta en cortocircuito
Excluyendo estado de circuito cerrado, y el párrafo Evitar Que los Conductores metálicos expuestos
Compruebe motor Conectado a la orden de cableado duro
Re-cableado de Acuerdo a la ESPECIFICACIÓN Para El cableado
Compruebe si el valor establecido es Mucho Mayor Que los Valores de Fábrica
Responder a los Valores Originales de Fábrica, then la Cantidad de Corrección
Compruebe el Orden de entrada de control de es Demasiado drásticos Cambios
Cambios en las MASA Fijas o Función de Filtrado de Comandos de entrada abierta
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 93/102
Er.004
Culpa de Mí nima tensión
Compruebe EL cableado de la tensión de entrada del circuito principal ES normales
Cableado de tensión Volvió una Confirmar
Medidor de Voltaje párrafo Medir la tensión del circuito es normal principal
Asegurese De que el interruptor de Encendido de nuevo
La Medición del Sistema de Alimentación Con Un voltí metro si el Lí mite Especificado
Utilice la fuente de tensión correcta del transformador o de la serieEr.005
Fallo de sobretensión
Voltaje metro párrafo Medir la tensión de entrada del circuito Tiene Permitido
Tensión en el valor
Utilice la fuente de tensión correcta del regulador o serie
La Medición del Sistema de Alimentación Con Un voltí metro si el Lí mite Especificado
Utilice la fuente de tensión correcta del transformador o de la serie
Cuando El medidor de Voltaje párrafo Medir la tensión de entrada nominal del circuito principal de la
tensión permite Que
Este valor SE Encuentra Dentro todaví a se producirá el error
Volver a la Revisión de la Fábrica
Er.006
Error de Secuencia de fase
Compruebe el motor U, V, W si cableados misión
La U, V, W cableado correcto de Acuerdo con el Manual, y de Hecho
Planta
Er.007
Fase
Compruebe el motor U, V, W this Desconectado o flojoVuelva a Conectar la U, V, W Conectados
Er.008
AD Inicialización
Mal FUNCIONAMIENTO
Los Parámetros de Inicialización y re-Poder
Despues De Restablecer repetidamente tiempoo Sigue Siendo anormal, Regreso a la Revisión de la
Fábrica
Er.009
Módulo de muestreo AD
Culpa BloquearEr.00A
Er.00B
Sobrecarga del motor Que
Barrera
Sobrecarga Drive
Mal FUNCIONAMIENTO
Carga EXCEDE nominal el continuo USO servo drive
Monitoreo de Parámetros Pr0.09 y Pr0.10, compruebe el motor
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 94/102
Es una del en Condición de Sobrecarga
Compruebe los Errores de cableado del motor y del encoder.
Cableado reconfirmado
Compruebe si el motor se ha estancado
Excluir Bloqueo del motor,
Sobrecargado
Aumentar la Capacidad del motor o reduzca la carga
Error de configuration del punto de Sobrecarga del motorDETECCION Pr8.13 Demasiado bajo.
Asegurese De que las Caracterí sticas de Sobrecarga del motor o servo drive y Funcionando
Instrucción
Re-carga Condición cambia, las Condiciones de FUNCIONAMIENTO y Capacidad del motor
Cantidad.
Er.00C
Er.00D
Por lo del tanto, el motor del recalentamiento
Conduzca un Través de la Barrera
Falla térmica
Compruebe la Temperatura Ambiente de Trabajo es muy alto
La Medición de la Temperatura ambiente, de Acuerdo Con La Temperatura ambiente párrafo Mejorar
el FUNCIONAMIENTO
Para el ambiente medio.
Compruebe la Dirección de installation servo unit, La Conexión con Otros Dispositivos
Poco Razonable
Compruebe la installation servo Unidad cumple con la Fase
: Disposiciones pertinentes.
Página 43
Chuan servo vigor servo serie B2 Instructions
--39--
Código de fallo
Nombre de alarma
Cheque anormalidad
Acciones
Er.00E
Diferentes Parámetros se almacenan
A Menudo,
Compruebe si el Dispositivo de acogida es con Frecuencia Una Función de la Unidad de servo
Parámetros Que Deben modificarse
El Método para change los Parámetros De Escribir y reescribir
CUALQUIER Modificación de la ONU PARÁMETRO y LUEGO re-Power vista de la
¿ EXISTEN parametros Ahorrar párr
Re-escrito y ver si se guardan, Como la escritura múltiple
Sin
Enviar un nuevo inspection de la Fábrica Puede Ser salvado.
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 95/102
Er.00F
Fan anormalidad
Compruebe si la Desconexión del ventilador o La Parada
Limpie el polvo del ventilador o reemplazar el ventilador
Er.010
Motor de sobrevelocidad Que
Barrera
Servo motor U, V, W Secuencia de Fases de los Errores de cableadoPor favor, compruebe el motor cableado del el, compruebe motor cableado del EL
Tener
Problema.
Servo motor U, V, W Secuencia de Fases de los Errores de cableado
Asegurese de la del que entrada de comando de Velocidad, valor de Instrucción Reducida o
Ganancia.
Rebase la Velocidad del motor
Verifique la forma de onda de la Velocidad del motor, reduciendo el regulador
Ganancia.
Función de ángulo cero eléctrico (PrE.18) y ángulo de Desplazamiento del codificador
(PrE.19) AJUSTES correctos hijo
Revisar to see si Estós dos Códigos de Función a la Configuracion de Fábrica
Valor,
Restaurar el valor de la Fábrica.
Er.011
Desconexión del codificador
Por favor verifique el codificador U, V, W, A, B, cableado Z
Correctamente;
Por favor, compruebe La Conexió
n del codificador conjunto es Sólido;Por favor, compruebe el cable del encoder es Señal de correlación de soldadura correcta del;
Vuelva a Confirmar el cableado, y volver a la Energí a, ya Que Muchas Veces de Hecho
Reconocer
LUEGO SE Desempeño Como una alarma, por favor vuelve A Fábrica Revisión
Er.012
Encoder ABZ
Seco
Perturbar
Compruebe codificador cableado es Sólido;
Por favor verifique el codificador se Hace el Procesamiento de la máscara;Compruebe si el codificador y La Lí nea de Alimentación de CA a lo largo de la alineación;
Er.013
Er.014
Posicion desviación
Gran
Mal FUNCIONAMIENTO
Ajuste de ganancia Reclamación es apropiado
Valor de ganancia Ajustada correctamente
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 96/102
Confirmé limite de par es Demasiado bajo
Ajustar correctamente el valor Lí mite de par
Compruebe la carga externa es Demasiado grande, o se estanca
Reducir la carga externa o re-evaluar v la Capacidad del motor
Página 44
Chuan servo vigor servo serie B2 Instructions--40--
Intervalo de inicio de trama
≥ 4 Caracteres
Dirección del esclavo
Código de comando
Datos
CRC checksum
Intervalo de fotograma End
≥ 4 Caracteres
ADUCapí tulo VIII Comunicación Descripción
8.1
Alcance
Por la servo serie Unidad Soporta el Protocolo ModBus, formato RTU, RS485 PUEDE utilizar RS232
o Comunicación (sin Mismo lo es
Cuando Se utilizació), con la roja de Autobuses RS485 Comunicaciones "maestro Único Multi-
esclavo." Antes de utilizar la Función de Comunicaciones, Dębe Conductor Cada Pasar
Parámetros de Noticias (Número de estación Pr7.00, Velocidad de transmisión Pr7.01, formato de
Datos Pr7.02) SET.
Parámetros de accionamiento internos pueden Ser modificadas por la Comunicación directa desde el
Ordenador Central párrafo Controlar La Unidad párr facilitar la Realización del transporte de
Velocidad interna
Lí nea o correr posicion interna.
8.2
Formato de Protocolo
Formato de Protocolo Como Se Muestra arriba, ADU (Unidad de Datos de programa) es la suma de
comprobación CRC16 comprobar v Las Tres Primeras contradictorio de ADU
Y A través del Intercambio de Aperitivos Derivada. En el Formato de Protocolo, la suma de
comprobación de Baja de la Parte Delantera CRC byte, byte Alto1, lee el Código de Función servo unit o palabra de estado (código de comando 0x03)
ADU parte
Recuento de bytes
Alcance
El anfitrión Enví a Una Solicitud:
Dirección del esclavo
1
0-0FEH
Código de comando
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 97/102
1
0x0003
Registrarse Dirección de inicio
2
0x0000-0x0FFFF
El Número de registro
2
0x0000-0x0008CRC checksum (baja palabra
Sección Primera)
2
Respuesta del esclavo:
Dirección del esclavo
1
Dirección Nativo
Código de comando
1
0x03
Bytes de lectura
1
2 * Número de registros
Contenidos Registrese
2 * Registro
Número
CRC checksum
2
Página 45
Chuan servo vigor servo serie B2 Instructions
--41--
2, Escriben los Códigos de Función servo Único de Unidad o Parámetros de control (código de
comando 0x06)
ADU parte
Recuento de bytes
Alcance
El anfitrión Enví a Una Solicitud:
Dirección del esclavo
1
0-0FEH
Código de comando
1
0x06
Dirección Registro
2
0x0000-0x0FFFF
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 98/102
Contenidos Registrese
2
0x0000-0x0FFFF
CRC checksum
2
Respuesta del esclavo:
Dirección del esclavo
1Dirección Nativo
Código de comando
1
0x06
Dirección Registro
2
0x0000-0x0FFFF
Contenidos Registrese
2
0x0000-0x0FFFF
CRC checksum
2
3, reescribir Múltiples Códigos de Función unidad servo o Parámetros de control (código de comando
0x10)
ADU parte
Recuento de bytes
Alcance
El anfitrión Enví a Una Solicitud:
Direcció
n del esclavo1
0-0FEH
Código de comando
1
0x10
Registrarse Dirección de inicio
2
0x0000-0x0FFFF
El Número de registro
20x0000-0x0008
Registrese Contenidos Bytes
1
2 * Número de registros
Contenidos Registrese
2 * Número de registros
CRC checksum
2
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 99/102
Respuesta del esclavo:
Dirección del esclavo
1
Dirección Nativo
Código de comando
1
0x10
Registrarse Dirección de inicio2
0x0000-0x0FFFF
El Número de registro
2
0x0000-0x0008
CRC checksum
2
Página 46Chuan servo vigor servo serie B2 Instructions
--42--
4, Diagnóstico de lí nea y los AJUSTES (código de comando 0x08)
ADU parte
Recuento de bytes
Alcance
El anfitrión Enví a Una Solicitud:
Dirección del esclavo
1
0-0FEHCódigo de comando
1
0x08
Código de subfunción
2
0x0000-0x0FFFF
Datos
2
CRC checksum
2
Respuesta del esclavo:
Dirección del esclavo
1
Dirección Nativo
Código de comando
1
0x08
Código de subfunción
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 100/102
2
0x0000-0x0FFFF
Datos
2
CRC checksum
2
Nota: 0x08 código de comando se utilizació párr comprobar v si La Lí nea this Conectada.
8.3Protocolo Formato Descripción
1, número de Estación: servoaccionamientos Dirección del esclavo, Rango fit el 1 de 247.
2, Código de Función:
Código de Función
Función
03H
Código de Función de lectura Parámetros servo drive o palabra de estado
06H
ESCRIBE los Códigos de Función servo Único de Unidad o Parámetros de control de10H
ESCRIBE Múltiples Códigos de Función unidad servo o Parámetros de control de
08H
Diagnóstico de lí nea y Los AJUSTES
3, la Distribución Dirección de registro
Nombre
Espacio de Direcciones
Explicación
Código de Función
0000H08xxH
El byte alto es Función de número de grupo de código, Pr0-PR8 Direcciones Que corresponde el byte
alto
Respectivamente, 00H-08H, byte bajo el es el Número del grupo de Código de Función. Por Example:
Pr1.07 corresponde a la Dirección 0107H.
2000H
28xxH
Si guarda los parametros Modificados, Modificar el contenido de la memoria EEPROM párrafo
Terminar
. En Esta Operación, Que Tiene Sólo Hacer Frente el Código de Función + 2000H Por Example:Pr1.07 corresponde a la Dirección 2107H
Página 47
Chuan servo vigor servo serie B2 Instructions
--43--
4, comprobación CRC
Primer baño Lugar, el Dispositivo transmisor Calcula el valor de CRC, junto con el ENVÍO del
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 101/102
Mensaje. Despues de recibir receptor Dispositivo ONU Vuelve un calcular el valor de CRC, y la
CRC valor calculado con la comparacion del valor Recibido. Si los DOS Valores no Iguales Hijo,
ENTONCES SE Produce error ONU Durante la transmisión.
CRC Proceso de Cálculo de suma de comprobación:
(1) definir CRC registro de la ONU, y Asignar valor inicial de la ONU, FFFFH.
(2) El Valor de la Información párr enviar el byte de imprimación de los Cálculos registro XOR CRC y
COLOCA el resultado m en el registro CRC
Embarcaciones. Desde el Inicio del Código de Dirección, los bits y el Inicio de parada sinPARTICIPAN en el Cálculo.
(3) la Extracción y el examen LSB (Menos registro CRC poco significativo).
(4) CRC registro Se Mueve a la Derecha, el poco Más alto con 0 suplemento.
(5) Si el LSB it 1, el registro CRC y los Cálculos de valor XOR A001H y Resultados en CRC registro
Embarcaciones.
(6) Repita los Pasos 4, 5, turnos Ocho hasta.
(7) Repita los Pasos 2,3,4,5,6, Manejar de enviar el siguiente byte de información. Proceso Continuo
SE Hasta Que El Proceso de Repite
Despues de enviar TODOS LOS bytes de información.
(8) El Cálculo se ha completado, el contenido del registro CRC es el valor CRC.
(9) se Enví a Primero en enviar ONU bajo valor de suma de comprobación CRC de bytes, Despues de
enviar el byte alto.
5, Respuesta anormal
Cuando El anfitrión Enví a los Datos erróneos O Alteración Provoca el error de Datos reciben SERVO
SE, SE devolvera Una Respuesta de Excepción. Anormal
Estructura de Datos de Respuesta:
ADU parte
Recuento de bytes
ExplicaciónCódigo de Dirección
1
Dirección del esclavo
Código de Función
1
El Código de Función igual a la transmisión de + 0x80
Código de Excepción
1
Consulte la tabla de Códigos de Excepción
Comprobación CRC (L)2
CRC16
Comprobación CRC (H)
CRC16
Excepción tabla de Códigos:
Código de Excepción
SIGNIFICADO
01
7/17/2019 Program Servo Trad
http://slidepdf.com/reader/full/program-servo-trad 102/102
Errores de CRC
02
Código de Función es Incorrecta
04
Enviar Conmigo longitudinal es Incorrecta
08
Error Registrese de Dirección
10Digital error Registrese
20
Modificar Registrese el error
40
Ocupados EEPROM
Nota: Si el Código de Función de error, el código anormal es 0x02





























