Embed Size (px)
Citation preview

Program • 28.4.
– Model stability analysis – Unexpected model and system behaviour – Modelling structured populations – Example Model in Integrated pest control
• 5.5. no course • 12.5. additional course (O. Jakoby)
– Example bark beetle model – Spatial ecological models
• 19.5. – Forest models, climate change – Large scale spatio-temporal vegetation models – Return of exercise “stability ”
• 27.5. – Up-Scaling – Potential and limits of applying ecosystem models – Validation, Parameter identification, Sensitivity analysis,

Documents • ftp.wsl.ch/pub/lischke/VorlesungSystOek/
– Script: Gesamt.Text_all.pdf (70%match!) – Later:
• Praesentationen (updated versions will be uploaded later) – Vorl.Stabilitaet2015.pdf – Vorl.Entwicklung2014.pdf – Vorl.Waldmodelle2014.pdf – Vorl.ValiSensScalSummary2014.pdf – Vorl.treemig2014.pdf
• Uebung – Stability_Exercise.pdf
• Texts to read later – LischkeLandscapeModels.pdf – LischkeModelUpscaling.pdf

Equilibria
Stability analysis

Equilibria
Equilibria
• Where are they? • How do they look? • How sensitive are they to disturbances?

Equilibria
How to determine equilibria – Equilibrium, stationary point, fix point, steady state
• or – (limit-)cycles,oscillations...
• Condition for equilibrium: Nothing changes (at least
averaged over time),
• means “change in time”
• all derivatives have to be 0.
dttdy )(1

Equilibria
Logistic model !0= ⇒
*1 0=Y−= ⋅ ⋅
K YY r YK
r: Net reproductive rate
K: carrying capacity
KYK
YK=⇒=
− 2*0or
Equilibria at “no one there” and “at carrying capacity”

Equilibria Lotka-Volterra competition model
2 22 2 2
2
K YY r YK−
= ⋅ ⋅
1 11 1 1
1
K YY r YK−
= ⋅ ⋅
Y1,Y2 : 2 species
K1,K2: carrying capacity for species 1 and 2
1 1 21 21 1 1
1
K Y YY r YK
α− −= ⋅ ⋅
2 2 12 12 2 2
2
K Y YY r YK
α− −= ⋅ ⋅
α21, α12:competition effect of species 2 to species 1 (and other way round) by decreasing relative carrying capacity
,competing

Equilibria
=K1 − α21K2
(1− α12α21)
Equilibria LV competition !
1 1 21 21 1 1
1
!2 2 12 1
2 2 22
0
0
K Y YY r YK
K Y YY r YK
α
α
− − = ⋅ ⋅ = ⇒− − = ⋅ ⋅ =
1) Y1* = 0, Y2
* = 0
2) Y1* = 0, Y2
* = K2
3) Y2* = 0, Y1
* = K1
4)K1 −Y1 − α21Y2 = 0
→ Y1 = K1 −α21Y2
K2 − Y2 − α12Y1 = 0 → Y2 = K2 − α12Y1
= K2 −α12K1 + α12α21Y2
→ Y2(1− α12α21) = K2 −α12K1
→ Y2 =K2 −α12K1
(1− α12α21)
Y1 =
=K1 − α12α 21K1 −α 21K2 +α 21α12K1
(1− α12α21)
= K1 −α21K2 − α21 α12K1
(1−α12α 21)
K1 −α21Y2

Study qualitative model behaviour with EasyModelworks
• For Lotka-Volterra competition model • x1Dot=r1*x1*(K1-x1-a21*x2)/K1 • x2Dot=r2*x2*(K2-x2-a12*x1)/K2 • r1=r2=1, K1=10, K2=8, • vary a12 and a21:
– e.g. 1.0,0.9 ; 0.1,1.4; 0.8,0.3; 0.9,1.3
• Explore in time and state space – when does the model behave how?
• At start of simulation? • After long simulation time?
– how does it react to changes in parameters?

Stability
Stability
What happens if equilibrium is left?
• Method 1: Perturbation analysis: • Try out with EasyModelWorks what happens after a
disturbance • Logistic model with perturbation eps between t1 and
t2 • x1Dot= x1*r*(1-x1/K)+eps*switch((t-t1)*(t2-t),0,1) • r=0.7, K=10, t1=20,t2=21 • Vary eps, postive, negative

Stability
Stability
What happens if equilibrium is left?
• Method 1: Perturbation analysis: • Trajectory returns to equilibrium, if
– perturbation goes up and trajectory down – perturbation goes down and trajectory up
• the direction of the change after the perturbation must be opposite to the perturbation

Stability
Method 2: Determine the direction of the change after a disturbance
( ) ( ) ( )( ) 0K Kf Y K r K r KK K
ε εε ε ε− += − = ⋅ − ⋅ = ⋅ + >
0<
Derivative points to opposite direction as perturbation --> Stabilization, negative feed-back
( ) K YY f Y r YK−
= = ⋅ ⋅
Logistic Growth
( )f Y K ε= +
Right hand side at perturbation ε (>0) of equilibrium K:
( ) ( )( )K Kr K r KK K
ε εε ε− − −= ⋅ + ⋅ = ⋅ +

Stability
Direction of change
Derivative points to same direction as disturbance Destabilization, positive feed-back
( ) K YY f Y r YK−
= = ⋅ ⋅
Logististic growth
f (Y = 0 + ε) = r ⋅ε ⋅K −ε
K> 0 ( für ε < K)
f (Y = 0 −ε) = − r ⋅ε ⋅K +ε
K= − r ⋅ε(
εK
) < 0
Derivative with disturbance ε of equilibrium 0:

Stability
Method 3: Linear stability analysis
Stability, linear 1-dim.
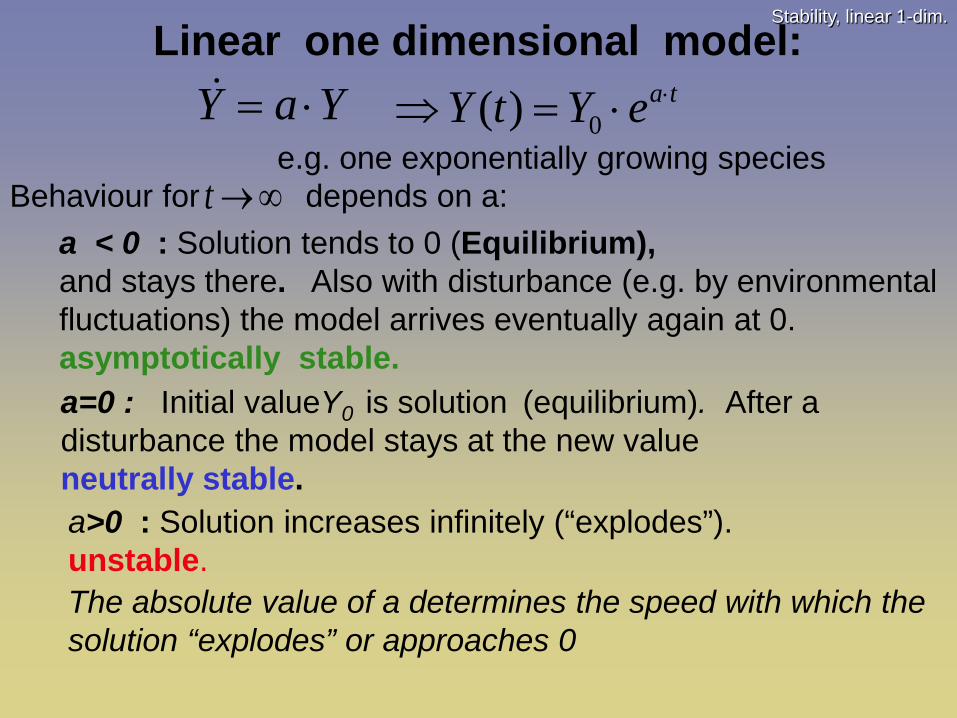
Linear one dimensional model:
a=0 : Initial valueY0 is solution (equilibrium). After a disturbance the model stays at the new value neutrally stable.
e.g. one exponentially growing species = ⋅Y a Y
Behaviour for depends on a:
t → ∞a < 0 : Solution tends to 0 (Equilibrium), and stays there. Also with disturbance (e.g. by environmental fluctuations) the model arrives eventually again at 0. asymptotically stable.
a>0 : Solution increases infinitely (“explodes”). unstable.
0( ) ⋅⇒ = ⋅ a tY t Y e
The absolute value of a determines the speed with which the solution “explodes” or approaches 0

Stability, linear multi-dim.
Linear multidimensional model
• The Eigenvalues λ of matrix A play a similar role as parameter a in the one dimensional model
11 12 1
21 22 2
1 2
n
n
n n nn
a a aa a a
Y Y A Y
a a a
= ⋅ = ⋅
nnnnnn
nn
nn
yayayay
yayayayyayayay
+++=
+++=+++=
...
......
2211
22221212
12121111
e.g. landscape transition model: y1, …, yn : landscape types, e.g. forest, pastures, fields, settlements, traffic areas, industrial areas a11, …, ann: transition probabilities (e.g. per year) between the landscape types

Stability, linear multi-dim.
Recall: Calculation of Eigenvalues
• Solution of of P(λ) = det(A - λ I) = 0, with I being the identity matrix.
• Reminder 1: • P(λ) is a polynomial of order n (dimension of
matrix) in λ and its n roots λι can be multiple as well as complex
• Reminder 2: – Complex number:
– Complex conjugate numbers: a+i b, a –i b
2 × 2 Matrix: deta11 a12
a21 a22
= a11a22 − a12a21
Real Imaginär--teil teil
a i b+ ⋅

Stability, linear multi-dim.
Meaning of Eigenvalues (λ) of A •The real parts of all λ’s are negative: equilibrium is asymptotically stable •The real parts of all λ’s are 0: equilibrium is neutrally stable. •The real part of at least one λ is positive: equilibrium is unstable. •The Eigenvalues are conjugate complex (negative argument of a square root): Oscillations

Stability, nonlinear, 1-dim
Nonlinear one dimensional model
– Ecological models are in most cases nonlinear
– Trick: in the equilibrium the right hand side is linearised (i.e. approximated by a linear function)

Stability, nonlinear, 1-dim
Linearisation • Derive the right hand side of the differential equation
with respect to the state variable – corresponds to a Taylor-series expansion, terminated after the
linear term – Taylor-series: Each function f(x) can be described by
∑∞
=
−=+−++−′′
+−′
+=0
)()(2 )(
!)(...)(
!)(...)(
!2)()(
!1)()()(
n
nn
nn
af axn
afaxn
afaxafaxafafxP
))(()()(~ mEquilibriuxmEquilibriufmEquilibriufxP −′+=
=0
)()( mEquilibriufxJ ′=Deflection from equilibrium
(Linear factor)
dxxdf a)(

Stability, nonlinear, 1-dim
Linearisation • Then go on according to the linear one
dimensional models. – Study sign of linear factor,
• negative -> stable • 0 -> neutrally stable • positive -> unstable • conjugate complex -> oscillations
• Results are valid only for equilibrium at which one has linearized !

Stability, nonlinear, 1-dim
Example for stability analysis: Logistic growth
2
( ) (1 )= = ⋅ ⋅ − = ⋅ −
Y rYY f Y Y r Y rK K
• Linearisation:
2( ) ( ) YJ Y f Y r rY K∂
= = −∂
• Equilibria:
Y1* = 0,Y2
* = K
• Substitute equilibria into linearized model:
J(0) = r − r2 ⋅ 0K
= r, J(K) = r − r2 ⋅K
K= − r
• unstable stable

Stability, nonlinear,multidim.
Nonlinear multidimensional model
• The entire “Right-hand-side-vector" is linearised at equilibrium.
• => Jacobi-Matrix – (is analogous to Matrix A
of linear models )
1 1 1
1 2
2 2 2
1 2
1 2
∂ ∂ ∂∂ ∂ ∂
∂ ∂ ∂∂ ∂ ∂
∂ ∂ ∂∂ ∂ ∂
=
n
n n n
n
Y Y YY Y YnY Y Y
J Y Y Y
Y Y YY Y Y
•Substitute equilibria •Determine Eigenvalues •Signs of real parts => stability

Stability, nonlinear,multidim.
Stability LV-competition: 21 1 21 2 1
1 1 1 1 1 1 21 1 21 1
22 2 12 1 22 2 2 2 2 2 12 1 2
2 2
( )
( )
K Y Y rY r Y Y K Y YYK K
K Y Y rY r Y Y K Y YYK K
α α
α α
− −= ⋅ ⋅ = ⋅ − −
− −= ⋅ ⋅ = ⋅ − −
Jacobi-Matrix:
J(Y *1,Y2
* ) =
r1K1
(K1 − 2Y1 −α 21Y2) −r1
K1
α21Y1
−r2
K2
α12Y2r2
K2
(K2 − 2Y2 −α12Y1)
Stability, nonlinear,multidim.
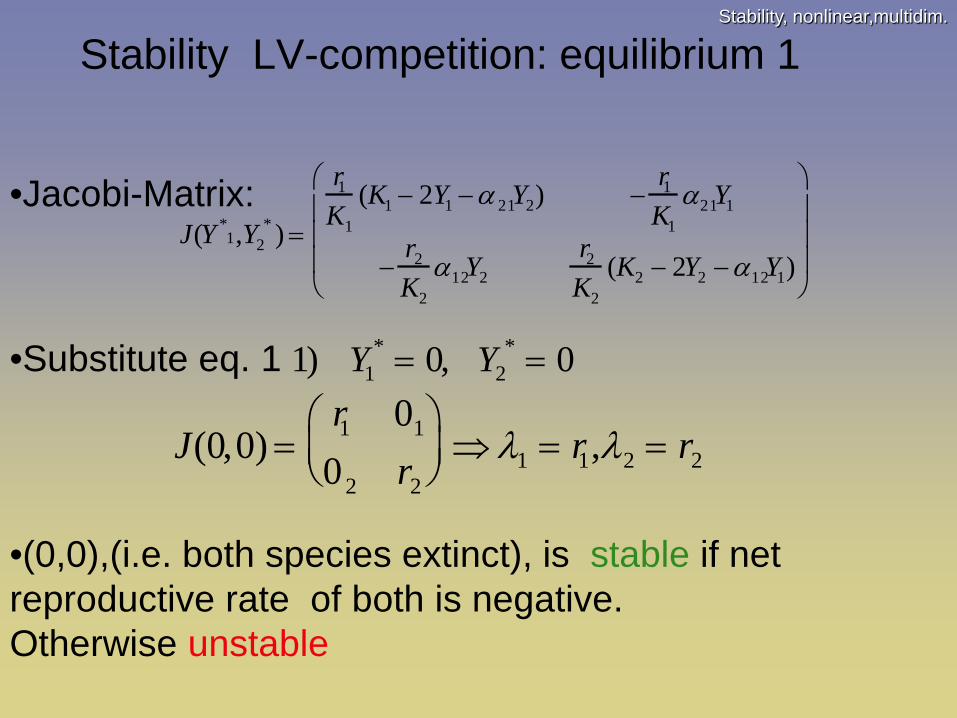
Stability LV-competition: equilibrium 1
•Jacobi-Matrix:
J(Y *1,Y2
* ) =
r1K1
(K1 − 2Y1 −α 21Y2) −r1K1
α21Y1
−r2
K2
α12Y2r2
K2
(K2 − 2Y2 −α12Y1)
•Substitute eq. 1
J(0,0) =r1 01
02 r2
⇒ λ1 = r1,λ2 = r2
•(0,0),(i.e. both species extinct), is stable if net reproductive rate of both is negative. Otherwise unstable
1) Y1* = 0, Y2
* = 0

Stability, nonlinear,multidim. Stability LV-competition,equilibria 2,3
1 2, 0 :r r >!
1 20, 0λ λ< < ⇒
•Jacobi-Matrix:
J(Y1,Y2) =
r1K1
(K1 − 2Y1 − α21Y2) −r1
K1
α 21Y1
−r2
K2
α12Y2r2
K2
(K2 − 2Y2 − α12Y1)
•Substitute eq.2 1 1 21
11 1 1 2 2 122
2 12 1 22
( ,0) , (1 )0 ( )
r rKJ K r rr K K K
K
αλ λ α
α
− − = ⇒ = − = − −
2) Y1* = K1, Y2
* = 0
•Equilibrium (K1,0),i.e. species 1 outcompetes species 2, is stable if net reproductive rate of species 1 is positive, and intraspecific competition of species 1 is smaller than the interspecific competition of species 1 to species 2. Otherwise unstable. •Analogous for equilibrium 3
1 1212
2 2 1
11KK K K
αα > ⇒ >

Stability, nonlinear,multidim.
Stability LV-competition,equilibrium 4
B: cr1(1−α21
K1K2) ⋅cr2 (1−
α12
K2K1) > cα 21r1(1−
α 21
K1K2) ⋅cα12r2(1−
α12
K2K1)
⇔ 1> α21α12 ⇒ c < 0
From conditions for stability for 2-dim. linear model
•Coexistence-equilibrium ist stable, if intraspecific competition is larger than interspecific for both species. Otherwise unstable.
J(Y *1,Y *
2) =cr1(1−
α 21
K1
K2) −cα 21r1(1−α 21
K1
K2)
−cα12r2 (1−α12
K2
K1) cr2 (1−α12
K2
K1)
,c =
1(α12α 21 −1)
21 12 21 121 2 2 1
1 2 2 1 1 2
1 1: (1 ) (1 ) 0A rc K r c K andK K K K K Kα α α α
− + − < ⇔ > >
Stability, nonlinear,multidim.
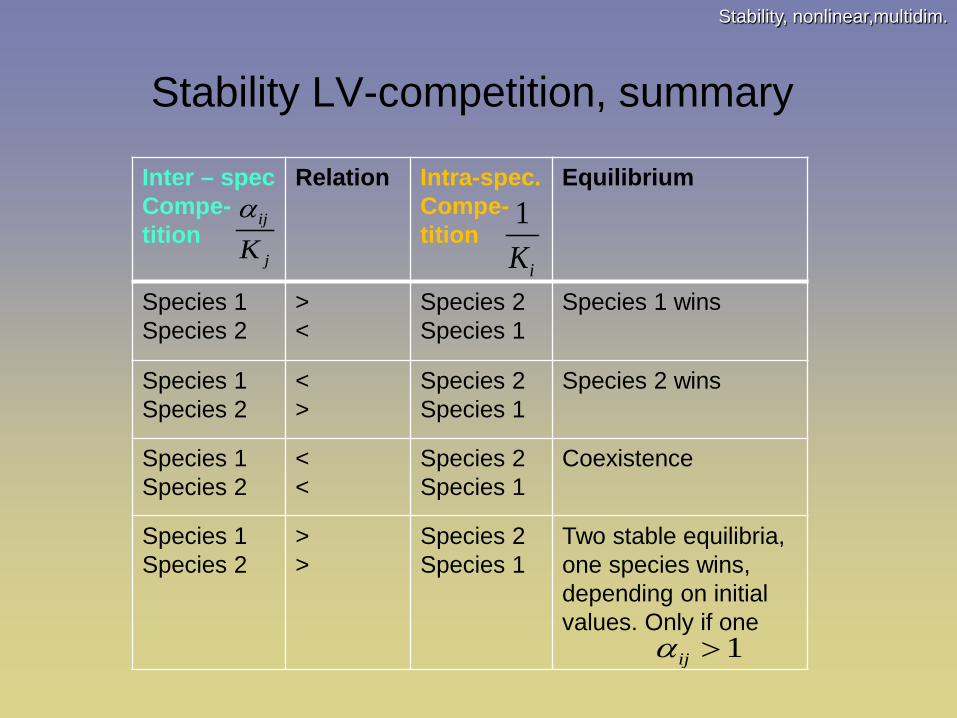
Stability LV-competition, summary
Inter – spec Compe-tition
Relation Intra-spec. Compe-tition
Equilibrium
Species 1 Species 2
> <
Species 2 Species 1
Species 1 wins
Species 1 Species 2
< >
Species 2 Species 1
Species 2 wins
Species 1 Species 2
< <
Species 2 Species 1
Coexistence
Species 1 Species 2
> >
Species 2 Species 1
Two stable equilibria, one species wins, depending on initial values. Only if one
1
iKij
jKα
1ijα >

Stabilität, zeitdiskret
Equilibrium and stability analysis for discrete time models
• Model:
X(k +1) = f (X(k))
X(k +1) = f (X(k)) = X(k)• Condition for Equilibrium: • Stability :
– 1. Linearisation of f(X(k)) – 2. Examination of Eigenvalues λ
• Absolute value of all λ <1: asymptotically stable • Absolute values of all λ = 1: (maybe) neutrally
stable • Absolute values of at least one λ >1: unstable • λ complex conjugate : Oscillation
2 2:a ib a b+ +
Absolute value of a complex number

Equilibrium and linear stability analysis in a nutshell Continuous time
Discrete time
model
equilibrium Linearisation, Jacobi-Matrix
Substitution of equilibria
Calculation of Eigenvalues λ
For stability type Eigenvalues must be
asymptotically stable
neutrally stable
instable
oscillations λ’s conjugate complex λ’s conjugate complex
0)),((!=ttyf
)),(()( 1 iii ttyfty
=+
)()( 1 ii tyty
=+
∂∂
∂∂
∂∂
∂∂
=
)()(...
)()(
:::)()(...
)()(
1
1
1
1
n
nn
n
yfyf
yfyf
yfyf
yfyf
J
0)det(!=− IJ λ
0)Re( <∀ λ0)Re( =∀ λ
0)(Re >λoneleastat
1<∀ λ1=∀ λ
1>λoneleastat
)),(()()( ttyftydt
tyd
==
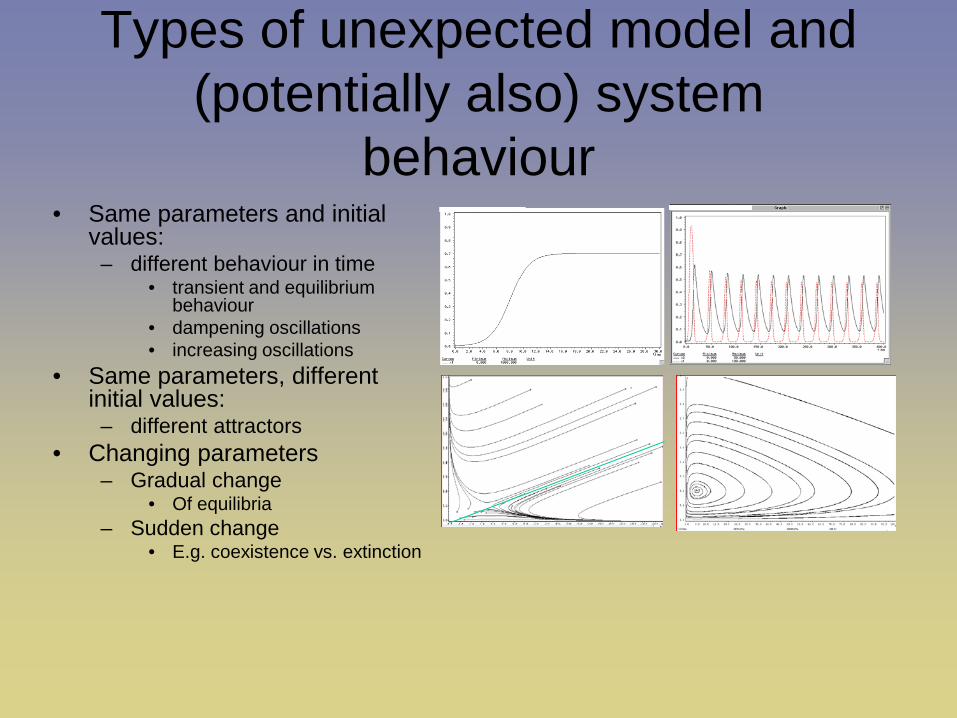
Types of unexpected model and (potentially also) system
behaviour • Same parameters and initial
values: – different behaviour in time
• transient and equilibrium behaviour
• dampening oscillations • increasing oscillations
• Same parameters, different initial values:
– different attractors • Changing parameters
– Gradual change • Of equilibria
– Sudden change • E.g. coexistence vs. extinction

Change of stability
Change of stability

Change of stability
Saturated harvesting from logistically growing stock
• model: pasture W grows logistically, eaten by R cows. But cows get saturated.
• Question: how many cows can the pasture bear?
0
(1 )
Grass Wachstum Rinderfrass
W WW r W RK W V
β
−
= ⋅ − − ⋅+

Change of stability
Saturated harvesting from logistically growing stock
• model: stock W grows logistically • harvested by R harvesters with a saturation function. • Question: how many harvesters can the stock bear? • For example W: Grass, R: cattle (fixed number)
)1(KWWrW −⋅⋅=
0VWWR+
⋅⋅− β

Change of stability
Change of equilibrium – as soon as equilibrium W3
*
appears, W1* becomes stable.
–W3* is always unstable,
– W2* always stable.
Implications • The unstable equilibrium W3
* separates the basins of attraction for the stable equilibria
W1* and W2
*. Separatrix
• The closer R gets to Rcrit2, the smaller becomes the area of attraction (“resilience”) of W2
*
• If Rcrit2 is surpassed, W2* can be reached only by decreasing R, and
lifting W above W3* . Only if R is lowered as much as to Rcrit1, W recovers
to W2* . Hysteresis
Rcrit2
Rinderbesatz R
Gra
ss W
0
3
1
2
Rcrit
V0
1

Change of stability
Equilibria
20 0
0 02 2
K V K V KV K Rr
β− − ⋅ − + − ⋅ >
0 0RVrβ
→ − <0 0KV K Rr
β ⋅→ − ⋅ <
0
(1 )
Grass Wachstum Rinderfrass
W WW r W RK W V
β
−
= ⋅ − − ⋅+
*1 0W =
2* 0 0
2,3 02 2K V K V KW V K R
rβ− − ⋅ = ± + − ⋅
equilibrium W3* becomes positive, if
equilibria W2* and W3
* disappear, i.e. the argument of the square root becomes negative for
1
0crit
V rR Rβ
→ > =
• model
⋅+
−
⋅=>→⋅+
−
>
⋅
⋅ KVVKK
rRRKVVKrKR crit 0
20
0
20
22 2 ββ

Change of stability
Stability
• linearisation
( )0
20
2(1 ) Vr W RK W V
β= − ⋅ − ⋅+
0
(1 )W WW r W RK W V
β= ⋅ − − ⋅+
( )0
20
2 W V WdW r W r RdW K W V
β+ −
= − ⋅ ⋅ − ⋅+
• model
• substitute trivial equilibrium
*1
0
( ) RW rV
βλ ⋅= −
• i.e. 0 becomes stable, when the 3rd equilibrium appears
1critR=0, 0 V rfür Rβ⋅
< >

Grenzzyklen
More strange model behaviour

Chaos
Discrete logistic model
yt +1 = yt ⋅ (1+ r ⋅ (1−yt
K))
Easy-Modelworks-Exercise:
Sample Models/Logistic growth (discr.)
Increase r from 0.1 to 2.6, note behaviour

Chaos
Discrete logistic model
yt +1 = yt ⋅ (1+ r ⋅ (1−yt
K))
r Type of equilibrium
1
1.9
2.4
2.5
2.56
2.6
3

Chaos
Discrete logistic model
yt +1 = yt ⋅ (1+ r ⋅ (1−yt
K))
r Type of equilibrium
1 Fixpoint
1.9 Dampened oscillation
2.4 2-Oscillation
2.5 4-Oscillation
2.56 8- Oscillation
2.6 Aperiodic Oscillation, Pseudo-Chaos
3 Chaos












![Algebraic graph statics - block.arch.ethz.ch · E-mailaddresses:vanmelet@ethz.ch(T.VanMele),pblock@ethz.ch(P.Block). visualfeedbackabouttherelationbetweenformandforcesinre-sponsetomanipulationsofthedrawingbytheuser[5–7].Ithas](https://img.pdfslide.us/doc/110x75/5b9fccbb09d3f2c2598b9139/algebraic-graph-statics-blockarchethzch-e-mailaddressesvanmeletethzchtvanmelepblockethzchpblock.jpg)