Embed Size (px)
Citation preview

PRODUCT USER MANUAL
For Sea Level SLA products SEALEVEL_GLO_SLA_L3_NRT_OBSERVATIONS_008_017
SEALEVEL_GLO_SLA_L3_REP_OBSERVATIONS_008_018
SEALEVEL_MED_SLA_L3_NRT_OBSERVATIONS_008_019
SEALEVEL_MED_SLA_L3_REP_OBSERVATIONS_008_020
SEALEVEL_BS_SLA_L3_NRT_OBSERVATIONS_008_022
SEALEVEL_BS_SLA_L3_REP_OBSERVATIONS_008_023
SEALEVEL_EUR_SLA_L3_NRT_OBSERVATIONS_008_024
SEALEVEL_ARC_SLA_L3_NRT_OBSERVATIONS_008_025
SEALEVEL_GLO_SLA_MAP_L4_NRT_OBSERVATIONS_008_026
SEALEVEL_GLO_SLA_MAP_L4_REP_OBSERVATIONS_008_027
SEALEVEL_MED_SLA_MAP_L4_NRT_OBSERVATIONS_008_028
SEALEVEL_MED_SLA_MAP_L4_REP_OBSERVATIONS_008_029
SEALEVEL_BS_SLA_MAP_L4_NRT_OBSERVATIONS_008_030
SEALEVEL_BS_SLA_MAP_L4_REP_OBSERVATIONS_008_031
SEALEVEL_GLO_NOISE_L4_NRT_OBSERVATIONS_008_032
SEA_LEVEL_GLO_NOISE_L4_REP_OBSERVATIONS_008_033
SEALEVEL_GLO_REF20YTO7Y_L4_OBSERVATIONS_008_034
SEALEVEL_MED_REF20YTO7Y_L4_OBSERVATIONS_008_035
SEALEVEL_BS_REF20YTO7Y_L4_OBSERVATIONS_008_036
Issue: 1.10
Contributors: Françoise Mertz (CLS), Vinca Rosmorduc (CLS), Caroline Maheu (CLS), Yannice Faugère (CLS)
CMEMS version scope : Version 1.0
Approval Date : July 9 2015

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
CHANGE RECORD
Issue Date § Description of change Author Validated by
1.0 2014/01/15 all First version of document for V4products
F. Mertz, V. Ros-morduc, C. Maheu
G. Larnicol
1.1 2014/03/24 all Corrections from Top level F. Mertz, V. Ros-morduc, C. Maheu
G. Larnicol
1.2 2014/05/13 all Version 4.1, addition of HY-2A F. Mertz, V. Ros-morduc, C. Maheu
G. Larnicol
1.3 2014/06/19 all Version 4.1, review from toplevel
F. Mertz, V. Ros-morduc, C. Maheu
G. Larnicol
1.4 2014/08/19 all Version September 2014 F. Mertz, V. Ros-morduc, C. Maheu
G. Larnicol
1.5 2014/10/27 all HY-2A in REP products F. Mertz, V. Ros-morduc, C. Maheu
G. Larnicol
1.6 2015/05/01 all Change format to fit CMEMSgraphical rules
F. Mertz, V. Ros-morduc, C. Maheu
G. Larnicol
1.7 2015/05/18 all New orbit standards GDR-E(Jason-2, Cryosat-2, AltiKa)
F. Mertz, V. Ros-morduc, C. Maheu
G. Larnicol
1.8 2015/06/30 all Implementation of theSaral/AltiKa geodetic orbit
F. Mertz, C. Maheu G. Larnicol
1.9 2015/07/09 all Modifications after review F. Mertz, C. Maheu G. Larnicol
1.10 2015/07/09 all Addition of gridded products F. Mertz, C. Maheu G. Larnicol
c© EU Copernicus Marine Service - Public Page 1

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
CONTENTS
I. Introduction 6
II. Altimetry Principle 8II.1. Definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8II.2. How to change the reference period . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
III.Deactivation of the HY-2A mission (August 2015 for NRT products) 10
IV. Geodetic orbit for AltiKa (April-August 2015) 11
V. SL-TAC system 12V.1. Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12V.2. Near Real Time processing steps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
V.2.1. Input data, models and corrections applied . . . . . . . . . . . . . . . . . . . . . . . 14V.2.2. Acquisition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17V.2.3. Homogenization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18V.2.4. Input data quality control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18V.2.5. Multi-mission cross-calibration . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19V.2.6. Product generation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
V.2.6.1. Change of Reference . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20V.2.6.2. Computation of raw SLA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21V.2.6.3. Cross validation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22V.2.6.4. Filtering and sub-sampling . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
V.2.7. Generation of gridded Sea Level Anomalies (MSLA) products . . . . . . . . . . . . 24V.2.7.1. Merging process . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
V.2.8. Quality control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25V.2.8.1. Final quality Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25V.2.8.2. Performance indicators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
V.3. Delayed Time processing steps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27V.3.1. Input data, models and corrections applied . . . . . . . . . . . . . . . . . . . . . . . 27V.3.2. Acquisition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31V.3.3. Homogenization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31V.3.4. Input data quality control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31V.3.5. Multi-mission cross-calibration . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32V.3.6. Product generation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
V.3.6.1. Change of Reference . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33V.3.6.2. Computation of raw SLA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34V.3.6.3. Cross validation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35V.3.6.4. Filtering and sub-sampling . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
V.3.7. Generation of gridded Sea Level Anomalies (MSLA) products . . . . . . . . . . . . 37V.3.7.1. Merging process . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
V.3.8. Quality control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38V.3.8.1. Final quality Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
c© EU Copernicus Marine Service - Public Page 2

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
VI. COPERNICUS SL-TAC Products 39VI.1. Near Real Time Products . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
VI.1.1. Delay of the products . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40VI.1.2. Temporal availibility . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
VI.2. Delayed Time Products . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41VI.2.1. Delay of the products . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43VI.2.2. Temporal availibility . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
VII.Description of the product specification 46VII.1.General information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
VII.1.1.Along-track Sea Level Anomalies . . . . . . . . . . . . . . . . . . . . . . . . . . . 46VII.1.2.Gridded Sea Level Anomalies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51VII.1.3.Gridded Noise on Sea Level Anomalies . . . . . . . . . . . . . . . . . . . . . . . . 54
VIII.Nomenclature of files 57VIII.1.Nomenclature of files downloaded through the CMEMS Web Portal download Service . . . 57
VIII.1.1.Nomenclature of the Along Track Sea Level Anomalies . . . . . . . . . . . . . . . 57VIII.1.1.1.Nomenclature of the datasets . . . . . . . . . . . . . . . . . . . . . . . . . . . 57VIII.1.1.2.Nomenclature of the NetCdf files . . . . . . . . . . . . . . . . . . . . . . . . . 58
VIII.1.2.Nomenclature of the Gridded Sea Level Anomalies . . . . . . . . . . . . . . . . . . 59VIII.1.2.1.Nomenclature of the datasets . . . . . . . . . . . . . . . . . . . . . . . . . . . 59VIII.1.2.2.Nomenclature of the NetCdf files . . . . . . . . . . . . . . . . . . . . . . . . . 59
VIII.1.3.Nomenclature of the Gridded noise of Sea Level Anomalies . . . . . . . . . . . . . 60VIII.1.3.1.Nomenclature of the datasets . . . . . . . . . . . . . . . . . . . . . . . . . . . 60VIII.1.3.2.Nomenclature of the NetCdf files . . . . . . . . . . . . . . . . . . . . . . . . . 61
VIII.1.4.Nomenclature of the Gridded change of reference products . . . . . . . . . . . . . . 62VIII.1.4.1.Nomenclature of the datasets . . . . . . . . . . . . . . . . . . . . . . . . . . . 62VIII.1.4.2.Nomenclature of the NetCdf files . . . . . . . . . . . . . . . . . . . . . . . . . 62
IX. Data format 63IX.1. NetCdf . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63IX.2. Structure and semantic of NetCDF along-track (L3) files . . . . . . . . . . . . . . . . . . . 63IX.3. Structure and semantic of NetCDF maps (L4) files . . . . . . . . . . . . . . . . . . . . . . . 67IX.4. Structure and semantic of NetCDF Gridded Noise on Sea Level Anomaly files . . . . . . . . 70IX.5. Structure and semantic of NetCDF Gridded Change reference files . . . . . . . . . . . . . . 72
X. How to download a product 74X.1. Download a product through the CMEMS Web Portal Directgetfile Service . . . . . . . . . 74X.2. Download a product through the CMEMS Web Portal Ftp Service . . . . . . . . . . . . . . 74X.3. Download a product through the CMEMS Web Portal Subsetter Service . . . . . . . . . . . 74
XI. News and Updates 75XI.1. [Duacs] Operational news . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75XI.2. Updates . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
c© EU Copernicus Marine Service - Public Page 3

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
LIST OF TABLES
1 SL-TAC Near-Real Time Input data overview . . . . . . . . . . . . . . . . . . . . . . . . . 142 Corrections and models applied in SL-TAC NRT products produced from IGDRs. . . . . . . 153 Corrections and models applied in SL-TAC NRT products produced from OGDRs. . . . . . 164 Near-Real Time Filtering and sub-sampling values . . . . . . . . . . . . . . . . . . . . . . 235 Measurement noise error before/ after spatial filtering for Mediterranean and Black Sea
products (cms rms) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 246 Corrections and models applied to SL-TAC DT products for TOPEX/Poseidon, Jason-1,
Jason-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 287 Corrections and models applied in SL-TAC DT products for ERS-1, ERS-2, Envisat . . . . . 298 Corrections and models applied in SL-TAC DT products for Cryosat-2, GFO, AltiKa and
HY-2A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 309 Delayed Time Filtering and sub-sampling values . . . . . . . . . . . . . . . . . . . . . . . 3610 Measurement noise error before/ after spatial filtering for Mediterranean and Black Sea
products (cms rms) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3711 List of the time varying products in NRT . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3912 List of the time invariant products in NRT . . . . . . . . . . . . . . . . . . . . . . . . . . . 4013 List of the time varying products in Delayed Time . . . . . . . . . . . . . . . . . . . . . . . 4214 List of the time invariant products in Delayed Time . . . . . . . . . . . . . . . . . . . . . . 42
LIST OF FIGURES
1 FIGPRINCIPE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82 SL-TAC processing sequences . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133 Overview of the near real time system data flow management . . . . . . . . . . . . . . . . . 174 Merging pertinent information from IGDR and OGDR processing . . . . . . . . . . . . . . 185 Impact in cm of the reference change from 7 years to 20 years ([1993-1999] to [1993-2012]) 206 Noise Level in 1hz Jason-2 SLA estimated from mean wavenumber spectra over 2011 in
10˚x10˚ boxes (cm rms) before 65km filtering (left) and after (right) . . . . . . . . . . . . . . 247 Example with the key performance indicator on 2009/06/27 . . . . . . . . . . . . . . . . . . 268 Impact in cm of the reference change from 7 years to 20 years ([1993-1999] to [1993-2012]) 339 Noise Level in 1hz Jason-2 SLA estimated from mean wavenumber spectra over 2011 in
10˚x10˚ boxes (cm rms) before 65km filtering (left) and after (right) . . . . . . . . . . . . . . 3610 Three merged maps are produced daily: final map (d-6), intermediate map (d-3) and pre-
liminary map (d0) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4111 List of satellites in all-sat-merged products . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
c© EU Copernicus Marine Service - Public Page 4

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
LIST OF ACRONYMS
AL AltiKaATP Along-Track ProductADT Absolute Dynamic TopographyAVISO Archiving, Validation and Interpretation of Satellite Oceanographic dataBGLO Biais Grande Longueur d’OndeCal/Val Calibration - ValidationCERSAT Centre ERS d’Archivage et de TraitementCMA Centre Multimission Altimetry centerCORSSH CORrected Sea Surface HeightC2 Cryosat-2DAC Dynamic Atmospheric CorrectionDT Delayed TimeDTU Mean Sea Surface computed by Technical University of DanemarkDUACS Data Unification and Altimeter Combination SystemE1 ERS-1E2 ERS-2EN EnvisatENN Envisat on its non repetitive orbit (since cycle 94)ECMWF European Centre for Medium-range Weather ForecastingENACT ENhanced ocean data Assimilation and Climate predictionG2 Geosat Follow OnGIM Global Ionospheric MapsGDR Geophysical Data Record(s)HY-2A Haiyang-2AIERS International Earth Rotation ServiceIGDR Interim Geophysical Data Record(s)J1 Jason-1J1N Jason-1 on its new orbit (since cycle 262)J1G Jason-1 on its geodetic orbit (since May 2012)J2 Jason-2JPL Jet Propulsion LaboratoryLAS Live Access ServerLWE Long Wavelength ErrorsMADT Map of Absolute Dynamic TopgraphyMDT Mean Dynamic TopographyMOE Medium Orbit EphemerisMP Mean ProfileMSLA Map of Sea Level AnomalyMSS Mean Sea SurfaceNRT Near-Real TimeOE Orbit ErrorOER Orbit Error ReductionOpendap Open-source Project for a Network Data Access ProtocolPF Polynom FitPO.DAAC Physical Oceanography Distributed Active Archive Centre
c© EU Copernicus Marine Service - Public Page 5

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
POE Precise Orbit EphemerisRD Reference DocumentSAD Static Auxiliary DataSARAL Satellite with ARgos and ALtikaSI Signed IntegerSLA Sea Level AnomalySL TAC Sea Level Thematic Assembly CentreSSALTO Ssalto multimission ground segmentSSH Sea Surface HeightTAC Thematic Assembly CentreT/P Topex/PoseidonTPN Topex/Poseidon on its new orbit (since cycle 369)
c© EU Copernicus Marine Service - Public Page 6

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
I. INTRODUCTION
The Sea Level TAC (Thematic Assembly Centre) is one of the five TAC of the Copernicus Marine En-vironment Monitoring Service (CMEMS) project. The aim of this document is to describe the productsdelivered by the Sea Level TAC.The data produced in the frame of this TAC are generated by the processing system including data fromall altimeter missions: HY-2A, Saral/AltiKa, Cryosat-2, OSTM/Jason-2, Jason-1, Topex/Poseidon, Envisat,GFO, ERS-1&2.The products described in this user manual are the following:1)SEALEVEL_GLO_SLA_L3_NRT_OBSERVATIONS_008_017SEALEVEL_MED_SLA_L3_NRT_OBSERVATIONS_008_019SEALEVEL_BS_SLA_L3_NRT_OBSERVATIONS_008_022SEALEVEL_EUR_SLA_L3_NRT_OBSERVATIONS_008_024SEALEVEL_ARC_SLA_L3_NRT_OBSERVATIONS_008_025andSEALEVEL_GLO_SLA_L3_REP_OBSERVATIONS_008_018SEALEVEL_MED_SLA_L3_REP_OBSERVATIONS_008_020SEALEVEL_BS_SLA_L3_REP_OBSERVATIONS_008_023are Sea Level Anomalies observations from the altimeters.The data provided to users have a global coverage (SEALEVEL_GLO_*_OBSERVATIONS_008_*) andregional products are also computed over specific areas:Mediterranean Sea (SEALEVEL_MED_*_OBSERVATIONS_008_*)and Black Sea (SEALEVEL_BS_*_OBSERVATIONS_008_*).The following two regional products are available only in Near Real time:Europe (SEALEVEL_EUR_SLA_L3_NRT_OBSERVATIONS_008_024)and Arctic (SEALEVEL_ARC_SLA_L3_NRT_OBSERVATIONS_008_025).
2)SEALEVEL_GLO_SLA_MAP_L4_NRT_OBSERVATIONS_008_026SEALEVEL_MED_SLA_MAP_L4_NRT_OBSERVATIONS_008_028SEALEVEL_BS_SLA_MAP_L4_NRT_OBSERVATIONS_008_030andSEALEVEL_GLO_SLA_MAP_L4_REP_OBSERVATIONS_008_027SEALEVEL_MED_SLA_MAP_L4_REP_OBSERVATIONS_008_029SEALEVEL_BS_SLA_MAP_L4_REP_OBSERVATIONS_008_031are merged Maps of Sea Level Anomalies observations from the altimeters.
3)SEALEVEL_GLO_NOISE_L4_NRT_OBSERVATIONS_008_032SEALEVEL_GLO_NOISE_L4_REP_OBSERVATIONS_008_033are gridded products containing the noise of filtering of SLA Global Ocean products and are described insection V.2.6.4. for NRT and V.3.6.4. for REP. For Mediterranean and Black seas, only one value has beencalculated over the area and is given in the same sections.
c© EU Copernicus Marine Service - Public Page 7

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
4)SEALEVEL_GLO_REF20YTO7Y_L4_OBSERVATIONS_008_034SEALEVEL_MED_REF20YTO7Y_L4_OBSERVATIONS_008_035SEALEVEL_BS_REF20YTO7Y_L4_OBSERVATIONS_008_036are gridded products containg values to apply in order to calculate SLA with the 7 years reference period.Indeed, the products delivered since MyOcean V4 are referenced to 20 years of data whereas it was 7 yearsin the previous versions. Those products are thus delivered allowing the users to have time to adapt theirtools to the new reference period. See sections V.2.6.1. and V.3.6.1.
c© EU Copernicus Marine Service - Public Page 8

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
II. ALTIMETRY PRINCIPLE
II.1. Definitions
Figure 1: Altimetry Principle
• The Altimetry gives access to the Sea Surface Height (SSH)above the reference ellipsoïd (see figure 1)
SSH = Orbit - Altimetric Range
• The Mean Sea Surface (MSS) is the temporal mean of the SSHover a period N. It is a mean surface above the ellipsoïd and itincludes the Geoid. See the detailed computation in V.2.6.2. andV.3.6.2.
MSSN=<SSH>N
• The dynamical part of the signal: Sea Level Anomaly (SLA)is deduced from the SSH using a Mean Sea Surface(MSS):
SLAN = SSH - MSSN
• The Mean Dynamic Topography (MDT) is the temporal meanof the SSH above the Geoid over a period N.
MDTN = MSSN - Geoid
• The dynamical part of the absolute signal: Absolute Dynamic Topography (ADT) is deduced from theSLA using a Mean Dynamic Topography (MDT):
ADT= SLAN - MDTN = SSH - MSSN - MDTN
c© EU Copernicus Marine Service - Public Page 9

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
II.2. How to change the reference period
The delivered products have a reference period of 20 years (N). If you need to change to another referenceperiod (P), you have to compute:
SLAP = SLAN - <SLAN>P
MSSP = MSSN + <SLAN>P
MDTP = MDTN + <SLAN>P
Where <>X is the temporal mean over the period X
By definition ADT is not dependant of any reference period:
ADT = MDTN + SLAN = MDTP + SLAP
c© EU Copernicus Marine Service - Public Page 10

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
III. DEACTIVATION OF THE HY-2A MISSION (AUGUST 2015 FOR NRTPRODUCTS)
Between July 6th and 28th 2015, a first deactivation of HY-2A mission had been done because the inputdata were degraded and it strongly impacted the products. At the end of August 2015, the input data wereagain degraded and on August 28th 2015, the mission has been deactivated in the processing for the samereason as before. This time, it is planned to reintegrate HY-2A mission when the input data have a morerobust validation.
c© EU Copernicus Marine Service - Public Page 11

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
IV. GEODETIC ORBIT FOR ALTIKA (APRIL-AUGUST 2015)
The SARAL/AltiKa’s ground track has been drifting from its nominal track between April 1st, and August11th, 2015. Indeed, due to reaction wheel issues, SARAL station keeping maneuvers couldn’t be performednominally since March 31st, 2015. As a result, SARAL/AltiKa’s ground track has been drifting with devia-tions from the nominal track overtaking 10km depending on the latitude, instead of +/-1km usually. SinceAugust 11th and thanks to many maneuvers, the platform is again under control and the nominal track hasbeen reached. This drift has an impact on the SL-TAC AL products between April 1st, 2015 and August11th, 2015.
The processing for a repetitive mission (like Jason-2) includes the projection of the measurement into atheoretical track position in order to benefit from the precise Mean Profile estimated from past missions(see V.2.6.2. and V.3.6.2.). For SARAL/AltiKa during April 1st and August 11th, as the distance betweenthe theoretical track and the true track position is large, this projection processing induces an additionalerror in the product. Since mid may 2015, we have indeed observed an increase of the variability of theSARAL/AltiKa SLA at short wavelengths (< about 200km).In order to limit the degradation of the quality of the product in NRT processing, the SARAL/AltiKa mis-sion is processed since June 30th, 2015 as a geodetic mission, i.e. avoiding projection on a theoretical track,as currently done for Cryosat-2 or HY-2A processing. This implies that the measurement positions changefrom one cycle to another one. Moreover, a short wavelength error is induced on the raw SARAL/AltiKameasurement, due to the use of a gridded Mean Sea Surface solution rather than a more precise Mean Profilefor SLA computation. However, SL-TAC processing includes an along-track filtering that strongly reducesthis error signature on filtered products (see V.2.6.4. and V.3.6.4.).As the orbit position constraint is still uncertain at this date, the NRT processing will continue as a geodeticmission. Note that in Delayed Time, the processing is adapted to the type of SARAL/AltiKa orbit: themission is processed as a geodetic mission between March 31st and August 11th 2015 and processed as arepetitive mission otherwise.
c© EU Copernicus Marine Service - Public Page 12

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
V. SL-TAC SYSTEM
V.1. Introduction
This chapter presents the input data used by the system and an overview of the different processing stepsnecessary to produce the output data.SL-TAC system is made of two components: a Near Real Time one (NRT) and a Delayed-Time (REP) one.In NRT, the system’s primary objective is to provide operational applications with directly usable high qual-ity altimeter data from all missions available.In REP, it is to maintain a consistent and user-friendly altimeter database using the state-of-the-art recom-mendations from the altimetry community.Following figure gives an overview of the system, where processing sequences can be divided into 7 mainsteps:
• acquisition
• homogenization
• input data quality control
• multi-mission cross-calibration
• product generation
• merging
• final quality control.
c© EU Copernicus Marine Service - Public Page 13

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
Figure 2: SL-TAC processing sequences
c© EU Copernicus Marine Service - Public Page 14

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
V.2. Near Real Time processing steps
V.2.1. Input data, models and corrections applied
To produce along-track (L3) products in near-real time, the SL-TAC system uses two flows, based on thesame instrumental measurements but with a different quality:
• The IGDRs that are the latest high-quality altimeter data produced in near-real-time.
• The OGDRs that include real time data (SARAL/AltiKa, OSTM/Jason-2 and Cryosat-2) to completeIGDRs. These fast delivery products do not always benefit from precise orbit determination, norfrom some external model-based corrections (Dynamic Atmospheric Correction (DAC), Global Iono-spheric Maps (GIM)).
Integration of OGDR data increased the resilience and precision of the system. A better restitution of oceanvariability is observed, especially in high energetic areas.
Altimetric product Source Availability Type of orbit
Jason-2 IGDR CNES ~24h CNES MOE GDR-E
OGDR NOAA/EUMETSAT ~3 to 5 h
Cryosat-2 IGDR-like ESA/CNES ~48 h CNES MOE GDR-E
OGDR-like ESA/CNES best effort
Saral/AltiKa IGDR CNES ~48 h CNES MOE GDR-Duntil June 30, 2015CNES MOE GDR-Eafterwards
OGDR ISRO/EUMETSAT ~3 to 5 h
HY-2A IGDR CNES/NSOAS best effort (with amean delay of 72 h)
CNES MOE GDR-D
Table 1: SL-TAC Near-Real Time Input data overview
See Figure 3: Overview of the near real time system data flow management.
c© EU Copernicus Marine Service - Public Page 15

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
NRT product from IGDR1
j2 c2 al h2
Product version D CPP [4] version T patch 2 HPP [51]
Orbit CNES MOE GDR-E CNES MOE GDR-E CNES MOE GDR-Duntil June 30 2015,
CNES MOE GDR-Eafterwards
CNES MOE GDR-D
Ionopheric bi-frequency altimeterrange measurements
GIM model (Iijima et al,1998[31])
Dry tropo Model computed from ECMWF Gaussian grids (S1 and S2 atm tides applied)
Wet tropo-sphere
AMR radiometer(enhancement in coastal
regions)
Model computed from ECMWF Gaussiangrids
Model computedfrom ECMWFGaussian grids
DAC MOG2D High Resolution forced with ECMWF pressure and wind fields (S1 and S2 wereexcluded) (Carrere and Lyard, 2003[6])+ inverse barometer. Filtering temporal window is
recentered using forecasts
Ocean tide GOT4v8 (S1 and S2 are included) and TPX 07.2 [22] for Arctic products
Pole tide [Wahr, 1985 [69]]
Solid earthtide
Elastic response to tidal potential [Cartwright and Tayler, 1971[8]], [Cartwright and Edden,1973[9]]
Loading tide GOT4v8 (S1 and S2 are included)
Sea statebias
Non Parametric SSB [N.Tran et al., 2012[65]] (with
cycles J2 1-36 usingGDR-D
Non parametric SSBfrom J1 with
unbiased sigma0
Hybrid SSB (methodfrom Scharroo et al,
2004 [63] applied to al)
Calculated fromHPP [51]: -3.45%
of SWH
Orbit error Global multi-mission crossover minimization (Le Traon and Ogor,1998[40])
LW errors Optimal Interpolation [Le Traon et al., 1998[39]]
Intercalibration Reference from cycle 20
Mean profile(see V.2.6.1.and V.2.6.2.)
Computed with 20 years ofTP/J1/J2 data; referenced
[1993,2012]
MSS_CNES_CLS11[48] referenced
[1993,2012]
Until June 30th, 2015:Computed with 15 years
of E1/E2/EN data;referenced [1993,2012];
Since July 1st, 2015:MSS_CNES_CLS11
[48] referenced[1993,2012]
MSS_CNES_CLS11[48] referenced
[1993,2012]
(1) A flag included in the along-track files indicates the source of the production (OGDR/FDGDR or IGDR). If flag=0, the
processed data comes from OGDRs/FDGDRs; if flag=1, the processed data comes from IGDRs.
Table 2: Corrections and models applied in SL-TAC NRT products produced from IGDRs.
c© EU Copernicus Marine Service - Public Page 16

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
NRT product from OGDR 2
j2 c2 al
Productstandard ref
version D CPP [4] version T patch 2
Orbit Navigator
Ionopheric bi-frequency altimeter rangemeasurements
GIM model (Iijima et al,1998[31])
Dry tropo-sphere
Model computed from ECMWF Gaussian grids (S1 and S2 atm tides applied)
Wet tropo-sphere
AMR radiometer(enhancement in coastal
regions)
Model computed from ECMWF Gaussian grids
DAC MOG2D High Resolution forced with ECMWF pressure and wind fields (S1 and S2were excluded) (Carrere and Lyard, 2003[6])+ inverse barometer. Filtering temporal
window is decentered using forecasts
Ocean tide GOT4v8 (S1 and S2 are included) and TPX 07.2 [22] for Arctic products
Pole tide [Wahr, 1985 [69]]
Solid earthtide
Elastic response to tidal potential [Cartwright and Tayler, 1971[8]], [Cartwright and Edden,1973[9]]
Loading tide GOT4v8 (S1 and S2 are included)
Sea statebias
Non Parametric SSB [N. Tranet al., 2012[65]] (with cycles J2
1-36 using GDR-D
Non parametric SSB from J1with unbiased sigma0
Hybrid SSB (method fromScharroo et al, 2004 [63]
applied to al)
Orbit error Specific filtering of long-wavelength signal3
LW errors Optimal Interpolation [Le Traon et al., 1998[39]]
Intercalibration Reference from cycle 20
Mean profile(see V.2.6.1.and V.2.6.2.)
Computed with 20 years ofTP/J1/J2 data; referenced
[1993,2012]
MSS_CNES_CLS11 [48]referenced [1993,2012]
Until June 30th, 2015:Computed with 15 years ofE1/E2/EN data; referenced
[1993,2012];Since July 1st, 2015:
MSS_CNES_CLS11 [48]referenced [1993,2012]
(2) A flag included in the along-track files indicates the source of the production (OGDR or IGDR). If flag=0, the processed data
comes from OGDRs; if flag=1, the processed data comes from IGDRs.
(3) Specific data processing was applied on long wave-length signal (§V.2.3. of the user manual)
Table 3: Corrections and models applied in SL-TAC NRT products produced from OGDRs.
c© EU Copernicus Marine Service - Public Page 17

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
V.2.2. Acquisition
The acquisition process is twofold:
• straightforward retrieval and reformatting of altimeter data and dynamic auxiliary data (pressure andwet troposphere correction grids from ECMWF are provided by Meteo France, TEC grids from JPL,NRT MOG2D corrections,...) from external repositories.
• synchronisation process.
To be homogenized properly, altimeter data sets require various auxiliary data. The acquisition softwaredetects, downloads and processes incoming data as soon as they are available on remote sites (externaldatabase, FTP site). Data are split into passes if necessary. If data flows are missing or late, the synchroni-sation engine put unusable data in waiting queues and automatically unfreezes them upon reception of themissing auxiliary data. This processing step delivers "raw" data, that is to say data that have been dividedinto cycles and passes, and ordered chronologically.The acquisition step uses two different data flows in near-real time: the OGDR flow (within a few hours),and the IGDR flow (within a few days).For each OGDR input, the system checks that no equivalent IGDR entry is available in the data base beforeacquisition; for each IGDR input, the system checks and delete the equivalent OGDR entry in the data base.These operations aim to avoid duplicates in SL-TAC system.
Figure 3: Overview of the near real time system data flow management
c© EU Copernicus Marine Service - Public Page 18

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
V.2.3. Homogenization
The homogenization process consists of applying the most recent corrections, models and references homo-geneously for all missions and recommended for altimeter products. Each mission is processed separatelyas its needs depend on the base input data. The list of corrections and models currently applied is providedin tables 2 and 3 for NRT data. The system includes SLA filtering to process OGDR data. The SL-TACprocessing extracts from these data sets the short scales (space and time) which are useful to better describethe ocean variability in real time, and merge this information with a fair description of large scale signalsprovided by the multi-satellite observation in near real time (read: IGDR-based data). Finally an "hybrid"SLA is computed.
Figure 4: Merging pertinent information from IGDR and OGDR processing
V.2.4. Input data quality control
The Input Data Quality Control is a critical process applied to guarantee that SL-TAC uses only the mostaccurate altimeter data. Thanks to the high quality of current missions, this process rejects a small percent-age of altimeter measurements, but these erroneous data could be the cause of a significant quality loss.The quality control relies on standard raw data editing with quality flags or parameter thresholds, but alsoon complex data editing algorithms based on the detection of erroneous artefacts, mono and multi-missioncrossover validation, and macroscopic statistics to edit out large data flows that do not meet the system’srequirements.
c© EU Copernicus Marine Service - Public Page 19

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
V.2.5. Multi-mission cross-calibration
The Multi-mission Cross-calibration process ensures that all flows from all satellites provide a consistentand accurate information. It removes any residual orbit error (OE, Le Traon and Ogor, 1998[40]), or longwavelength error (LWE, Le Traon et al., 1998[39]), as well as large scale biases and discrepancies betweenvarious data flows.
This process is based on two very different algorithms: a global multi-mission crossover minimization fororbit error reduction (OER), and Optimal Interpolation (OI) for LWE.
Multi-satellite crossover determination is performed on a daily basis. All altimeter fields (measurement,corrections and other fields such as bathymetry, MSS,...) are interpolated at crossover locations and dates.Crossovers are then appended to the existing crossover database as more altimeter data become available.This crossover data set is the input of the Orbit Error Reduction (OER) method. Using the precision of thereference mission orbit (TP/J1/J2), a very accurate orbit error can be estimated. This processing step doesnot concern OGDR data.
LWE is mostly due to residual tidal, high frequency ocean signals remaining errors and residual orbit error.The OI used for LWE reduction uses precise parameters derived from:
• accurate statistical description of sea level variability
• regional correlation scales
• mission-specific noise and precise assumptions on the long wavelength errors to be removed (from arecent analysis of one year of data from each mission).
V.2.6. Product generation
The product generation process is composed of four steps: computation of raw SLA, cross-validation,filtering&sub-sampling, and generation of by-products.
c© EU Copernicus Marine Service - Public Page 20

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
V.2.6.1. Change of Reference
As from April 2014, an important modification has been implemented in SL-TAC products. Indeed,the period of reference was 7 years in older version (from 1993 to 1999) and it is now 20 years (from1993 to 2012). This takes into account the variations of the oceans in the last years, as shown on Figure5. The detailed informations can be found in the document: MYO2-SL-QUID-008-017-036-v1.0.pdf andat the following url: http://www.myocean.eu/automne_modules_files/pmedia/public/r2267_9_sltac_technical_note.pdf.In order to give the users the time to adapt to this new reference period, three gridded products are deliveredfor global ocean, Mediterranean and Black seas:SEALEVEL_GLO_REF20YTO7Y_L4_OBSERVATIONS_008_034SEALEVEL_MED_REF20YTO7Y_L4_OBSERVATIONS_008_035andSEALEVEL_BS_REF20YTO7Y_L4_OBSERVATIONS_008_036
If you may wish to come back to the 7 year reference period (=SLA7years): for each measurement ofSLA20years from the new products,
• since the REF20YTO7Y products are gridded, you need to interpolate at the location of the SLAmeasurement the variable ref20yto7y (see IX.5. for information about the format of the file)
• calculate SLA7years=SLA20years from the new products - ref20yto7y previously calculated
Figure 5: Impact in cm of the reference change from 7 years to 20 years ([1993-1999] to [1993-2012])
c© EU Copernicus Marine Service - Public Page 21

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
V.2.6.2. Computation of raw SLA
The SSH anomalies are used in oceanographic studies. They are computed from the difference of the in-stantaneous SSH minus a temporal reference. This temporal reference can be a Mean Profile (MP) in thecase of repeat track or a gridded MSS when the repeat track cannot be used. The errors affecting the SLAs,MPs and MSS have different magnitudes and wavelengths. The computation of the SLAs and their errorsassociated are detailed in Dibarboure et al, 2010 [14].
Use of a Mean ProfileIn the repeat track analysis at 1 Hz (when the satellites flies over a repetitive orbit), measurements are re-sampled along a theoretical ground track (or mean track) associated to each mission. Then a Mean Profile(MP) is subtracted from the re-sampled data to obtain SLA. The MP is a time average of similarly re-sampleddata over a long period.
• The Mean Profile used for Saral/Altika until June 30th, 2015 is computed with 15 years of ERS-1,ERS-2 and Envisat, referenced to the period [1993, 2012]. Since July 1st, 2015, no Mean Profile canbe used for AltiKa because the orbit is drifting. The MSS is used instead of the MP (see below).
• The Mean Profile used for Jason-2 is computed with 20 years of T/P, Jason-1 and Jason-2, referencedto years [1993, 2012].
• No Mean Profile can be used for Cryosat-2 mission (c2). The MSS must be used instead (see below).
• No Mean Profile can be used for HY-2A mission (h2) because there are not enough data to calculateit. The MSS must be used instead (see below).
Computation of a Mean ProfileThe computation of a Mean Profile is not a simple average of similarly co-located SSH data from the sameground track on the maximum period of time as possible .
• Indeed, as the satellite ground track is not perfectly controlled and is often kept in a band of about1km wide, precise cross-track projection and/or interpolation schemes are required to avoid errors.
• The ocean variability is removed to minimize the seasonal/interannual aliasing effects. The mesoscalevariability error is eliminated with an iterative process using a priori knowledge from Sea Level mapsderived from previous iterations or from other missions.This process enables us to reference the meanprofiles for all missions to a common period (reference period) for the sake of consistency with othermissions. The reference period is [1993, 2012] and is thus independent from the number of years usedto compute mean profiles.
• Moreover, the inter-annual variabilty error is accounted for by using the MSS.
• Finally, for these Mean Profiles, the latest standards and a maximum of data were used in order toincrease as much as possible the quality of their estimation . Note that a particular care was broughtto the processing near coasts.
Use of a MSSThe repeat track analysis is impossible for Cryosat-2 mission (c2) and AltiKa mission after July 1st, 2015because the satellite is not in a repetitive orbit phase. Moreover, it is not possible for the moment to computea mean profile for HY-2A because there is not enough data to compute it.. The alternative is to use the MSSinstead. The gridded MSS is derived from along track MPs and data from geodetic phases. Thus any error
c© EU Copernicus Marine Service - Public Page 22

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
on the MP is also contained in the MSS. There are essentially 4 types of additional errors on gridded MSSwhich are hard to quantify separately:
• To ensure a global MSS coherency between all data sets, the gridding process averages all sensor-specific errors and especially geographically correlated ones.
• The gridding process has to perform some smoothing to make up for signals which cannot be resolvedaway from known track, degrading along-track content.
• There are also errors related to the lack of spatial and temporal data (omission errors).
• The error stemming from the geodetic data: the variability not properly removed before the absorptionin the MSS.
The MSS used in the products is MSS_CNES_CLS11 [48], referenced [1993,2012] except for the Arcticregional products, where the DTU10 MSS [2] referenced [1993,2012] is taken into account. Indeed, the ac-curacy of DTU10 compared to CNES_CLS11 is further demonstrated by the significant sea level anomalyvariance reduction found over the whole Arctic Ocean as shown in Prandi et al., [52]..
V.2.6.3. Cross validation
After the repeat track analysis, the cross-validation technique is used as the ultimate screening process todetect isolated and slightly erroneous measurements. Small SLA flows are compared to previous and inde-pendent SLA data sets using a- 12 year climatology and a 3 sigma criteria for outlier removal.
c© EU Copernicus Marine Service - Public Page 23

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
V.2.6.4. Filtering and sub-sampling
Residual noise and small scale signals are then removed by filtering the data using a Lanczos filter. Asdata are filtered from small scales, a sub-sampling is finally applied. Along-track SLA are then produced(those products are along-track *vfec* files). The filtering and sub-sampling is adapted to each region andproduct as a function of the characteristics of the area and of the assimilation needs. The values taken intoaccount are the following:
Filtering Sub-sampling
Global 65 km 14km
Mediterranean Sea about 40km 14km
Black Sea about 40km 14km
Europe about 35km No (7km)
Arctic about 35km No (7km)
Table 4: Near-Real Time Filtering and sub-sampling values
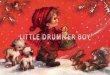
Noise estimationSince April 2014, a new filtering level takes into account the mesoscale capability computed for the Jason-2 1hz SLA. Users recommendations from the TAPAS working group motivated the choice of a spatiallyuniform cut-off length to filter SLA in association with a more accurate measurement error description.Therefore, a cut-off length of 65km is applied everywhere to filter SLA. Compared to the previous SLAfiltering applied, it changes drastically the SLA resolution at low latitudes. In these areas, cut-off lengthsare reduced from more than 100km (see detailed informations in MYO2-SL-QUID-017-036-v1.0).In wavenumber spectra, the 1hz measurement error is the noise level estimated as the mean value of energyat high wavenumbers (below 20km in term of wave length). The 1hz noise level spatial distribution (Figure6) follows the instrumental white-noise linked to the Surface Wave Height but also connections with thebackscatter coefficient. The full understanding of this hump of spectral energy (Dibarboure et al., 2013[12]) still remain to be achieved and overcome with new retracking, new editing strategy or new technology.Users of non-filtered SLA will have to use the 1hz estimated white noise (Figure 6 left) whereas users offiltered SLA the remaining error level after filtering (Figure 6 right).
c© EU Copernicus Marine Service - Public Page 24

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
Figure 6: Noise Level in 1hz Jason-2 SLA estimated from mean wavenumber spectra over 2011 in 10˚x10˚boxes (cm rms) before 65km filtering (left) and after (right)
The regional products as Mediterranean Sea, Black Sea cover too small areas to be concerned by such a mapof 1hz measurement error. In this case, a mean wavenumber spectrum has been computed over each areaand the noise level estimated from it. A constant value is then prescribed for the 1hz noise level as well asthe remaining error after filtering:
Before Filtering After FilteringCryosat-2 2.08 0.84Jason-2 2.36 0.95Saral/AltiKa 1.75 0.71HY-2A 2.52 1.00
Table 5: Measurement noise error before/ after spatial filtering for Mediterranean and Black Sea products(cms rms)
V.2.7. Generation of gridded Sea Level Anomalies (MSLA) products
V.2.7.1. Merging process
The Merging process is twofold: mapping and generation of by-products.
A mapping procedure using optimal interpolation with realistic correlation functions is applied to produceSLA maps (MSLA or L4 products) at a given date. The procedure generates a combined map mergingmeasurements from all available altimeter missions (Ducet et al., 2000[20]). The mapping process takesinto account an updated suboptimal Optimal Interpolation parameterization to minimize transition artefacts.More accurate correlation scales are used compared to Ducet et al., taking into account optimally the spatialvariability of the signal.Combining data from different missions significantly improves the estimation of mesoscale signals (LeTraon and Dibarboure, 1999[41]), (Le Traon et al., 2001[42]), (Pascual et al., 2006[49]). Several improve-ments were made compared to the version used by (Le Traon et al., 1998[39]). An improved statisticaldescription of sea level variability, noise and long wavelength errors is used. Covariance functions includ-ing propagation velocities that depend on geographical position were thus used. For each grid point, the
c© EU Copernicus Marine Service - Public Page 25

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
zonal and meridional spatial scales, the time scale and the zonal and meridional propagation velocities wereadjusted from five years of TP+ERS combined maps. In addition to instrumental noise, a noise of 10% ofthe signal variance was used to take into account the small scale variability which cannot be mapped andshould be filtered in the analysis.
Time windowIn the NRT DUACS processing, contrary to DT case, the products cannot be computed with a centred com-putation time window for OER, LWE and mapping processes: indeed, as the future data are not availableyet, the computation time window is not centered (for each day of production, 3 maps are computed: forthe maps of date D, D-3 and D-6 are using respectively the data in the time intervall of [D-42, D], [D-3-42,D+3] and [D-6-42, D+6]).
OGDR specificitySLA computation from OGDR is based on the same algorithms, only parameters are different to take intoaccount OGDR specificity. LWE and mapping process are based on IGDR and GDR available residuals,also with specific parameters.
Number of satellites to compute the mapsThe maps are computed with all the satellites available (up to 4 satellites) for each date. Thus it has the bestpossible sampling. This series is better in quality but not homogeneous over the time period, becauseit is based on the best sampling available in time. The figure 11 lists the missions taken into account forthe computation of the maps. Note that the list of missions is also provided in the gridded file in the globalattribute "platform".
Formal mapping errorThe formal mapping error represents a purely theoretical mapping error. It mainly represents errors inducedby the constellation sampling capability and consistency with the spatial/temporal scales considered, as de-scribed in Le Traon et al (1998) [39] or Ducet et al (2000) [20]. The formal mapping error is expressed inmeters and is delivered in the same NetCDF file as the SLA.
V.2.8. Quality control
The production of homogeneous products with a high quality data and within a short delay is the keyfeature of the SL-TAC processing system. But some events (failure on payload or on instruments, delay,maintenance on servers), can impact the quality of measurements or the data flows. A strict quality controlon each processing step is indispensable to appreciate the overall quality of the system and to provide thebest user services.
V.2.8.1. Final quality Control
The Quality Control is the final process used by SL-TAC before product delivery. In addition to dailyautomated controls and warnings to the operators, each production delivers a large QC Report composed ofdetailed logs, figures and statistics of each processing step. Altimetry experts analyse these reports twice aweek (only for internal validation, those reports are not disseminated).
V.2.8.2. Performance indicators
c© EU Copernicus Marine Service - Public Page 26

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
To appreciate the quality situation of the DUACS system, performance indicators are computed daily. Theyaim at evaluate the status of the main processing steps of the system: the input data availability, the inputdata coverage, the input data quality and the output product quality. These indicators are computed for eachand every currently working satellite, and combined to obtain the overall status.
Figure 7: Example with the key performance indicator on 2009/06/27
See the description, the latest and previous indicators on Aviso website:http://www.aviso.altimetry.fr/en/data/product-information/information-about-mono-and-multi-mission-processing/ssaltoduacs-multimission-altimeter-products/key-performance-indicators.html
c© EU Copernicus Marine Service - Public Page 27

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
V.3. Delayed Time processing steps
V.3.1. Input data, models and corrections applied
Delayed Time products are generated:
• from Aviso GDR products for Saral/AltiKa, Jason-1 (historical , tandem track and geodetic track),Jason-2
• from ESA GDR products for Cryosat-2, Envisat (historical, new orbit and drifting track), ERS-1(historical and geodetic track) and ERS-2
• from NOAA GDR for GFO.
• from NSOAS GDR for HY-2A.
The GDR products are computed with updated orbit and corrections as described in the following table.
c© EU Copernicus Marine Service - Public Page 28

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
Delayed-Time productj2 j1;j1n;j1g tp;tpn
Product GDR-D GDR-D GDR-COrbit Cnes POE (GDR-D standards
for cycles ≤253 and GDR-Eafterwards)
Cnes POE (GDR-D standards) GSFC (ITRF 2005,GRACE laststandards)
Ionopheric Dual frequency altimeter range measurements Dual frequency (Topex), DORIS(POSEIDON)
Dry tropo-sphere
Model computed fromECMWF Gaussian grids (newS1 and S2 atm. tides applied)
Model computed fromECMWF rectangular grids(new S1 and S2 atm. tides
included)
Model computed from ERAinterim Gaussian grids (new S1
and S2 atm. tides included)
Wet tropo-sphere
JMR/AMR radiometer TMR radiometer (Scharroo et al.2004 [62])
DAC MOG2D High Resolution forced with ECMWF pressure andwind fields (S1 and S2 excluded) + inverse barometer computed
from rectangular grids
MOG2D High Resolution forcedwith ERA-Interim pressure and
wind fields (S1 and S2 excluded) +inverse barometer computed from
rectangular gridsOcean tide GOT4v8 (S1 and S2 are included)Pole tide [Wahr, 1985[69]]Solid earthtide
Elastic response to tidal potential Cartwright and Tayler, 1971[8] ,Cartwright and Edden, 1973[9]
Loading tide GOT4v8 (S1 parameter is included)Sea statebias
Non Parametric SSB [N. Tranet al., 2012[65]] (with c J2 1-36
using GDR-D
Non Parametric SSB [N. Tranet al., 2012[65]](with c J1
1-111 using GDR-C standardsand GDR-D orbit
Non parametric SSB [N. Tran andal. 2010[67]] (using c 21-131 withGSFC orbit for TP-A; c 240-350
with GSFC orbit for TP-B)Orbit error Global multi-mission crossover minimization (Le Traon and Ogor, 1998 [40])LW errors Optimal Interpolation (Le Traon et al., 1998[39])Intercalibration Reference from cycle 11 Reference from cycle 1 to 354Global Bias Calibrated on J1+TP Mean Sea
Level (using c 1-11 J2); MSLzero reference in early 1993
Calibrated on TP Mean SeaLevel (using c 1-11 J1); MSLzero reference in early 1993
MSL zero reference in early 1993
Regional Bias Calibration on J2 Calibration on J1+J2Mean profile(see V.3.6.1.and V.3.6.2.)
Computed with 20 years ofTP/J1/J2 data; referenced
[1993,2012]
TP/J1: Computed with 20 years of TP/J1/J2 data; referenced[1993,2012];
TPN/J1N: computed with 6 years of TPN/J1N; referenced[1993,2012]
Period of use from cycle 9 from cycle 9 cycles 1 to 481
Table 6: Corrections and models applied to SL-TAC DT products for TOPEX/Poseidon, Jason-1, Jason-2.
The period of reference has changed since April 2014: it is now 20 years instead of 7 years. Please refer tosection V.3.6.1.
c© EU Copernicus Marine Service - Public Page 29

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
DUACS DT producte1 e2 en;enn
Product OPR GDR-V2.1+Orbit Reaper (Rudenko et al., 2012[61]) Cnes POE (GDR-D standards)Ionopheric Reaper (NIC09 model, Scharro
and Smith, 2010, [64])Bent model (c≤36), GIM
model (c≥37) ((Iijima et al,1998 [31])
Bi-frequency altimeter rangemeasurement (c≤64); GIM model
c≥65 (Iijima et al., 1999[31])corrected for 8 mm bias
Dry tropo-sphere
Model computed from ERA interim Gaussian grids (new S1and S2 atm. tides included)
Model computed from ECMWFGaussian grids (new S1 and S2
atm. tides applied)Wet tropo-sphere
MWR radiometer MWR corrected for 23.6GHzTB drift (Scharroo et al.,
2004[62])+ Neural Networkalgorithm (Tran and Obligis,
2003[66]
Cycles≤94: MWR (dist≥50kmfrom the coasts), ECMWF model
(50≥dist≥10km)Cycles≥95:MWR.
DAC MOG2D High Resolution forced with ERA-Interim pressureand wind fields (S1 and S2 excluded) + inverse barometer
computed from rectangular grids
MOG2D High Resolution forcedwith ECMWF pressure and wind
fields (S1 and S2 excluded) +inverse barometer computed from
rectangular gridsOcean tide GOT4v8 (S1 and S2 are included)Pole tide [Wahr, 1985[69]]]Solid earthtide
Elastic response to tidal potential Cartwright and Tayler, 1971[8] ,Cartwright and Edden, 1973[9]
Loading tide GOT4v8 (S1 parameter is included)Sea statebias
BM3 [Gaspar and Ogor1994[24]]
Non parametric SSB [Mertz etal., 2005[47]]
Non Parametric SSB [N. Tran etal., 2012[65]] compatible with
enhanced MWROrbit error Global multi-mission crossover minimization (Le Traon and Ogor, 1998 [40])LW errors Optimal Interpolation (Le Traon et al., 1998[39])Global Bias Calibrated on TP/J1/J2 Mean Sea LevelMean profile(see V.3.6.1.and V.3.6.2.)
Computed with 15 years of E1/E2/EN data; referenced[1993,2012]
EN: Computed with 15 years ofE1/E2/EN data; referenced
[1993,2012]ENN: use of MSS_CNES_CLS11
[48], referenced [1993,2012]Period of use cycles 15 to 43 Including E-F
geodetic phasescycles 1 to 83 from cycle 9
Table 7: Corrections and models applied in SL-TAC DT products for ERS-1, ERS-2, Envisat
The period of reference has changed since April 2014: it is now 20 years instead of 7 years. Please referto section V.3.6.1.
c© EU Copernicus Marine Service - Public Page 30

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
DT productc2 g2 al h2
Product CPP CNES [4] GDR (NOAA) GDR-T patch2 GDR (NSOAS)Orbit CNES POE (GDR-D
standards for cycles≤66 and GDR-E
afterwards)
GSFC (ITRF 2005,GRACE last standards
Cnes POE (GDR-Dstandards for cycles≤23 and GDR-E
afterwards)
Cnes POE (GDR-Dstandards)
Ionopheric From GIM model (Iijima et al, 1998 [31])Dry tropo-sphere
Model computed fromECMWF Gaussian
grids (new S1 and S2atm. tides applied)
Model computed fromECMWF rectangulargrids (new S1 and S2atm. tides included)
Model computed from ECMWF Gaussiangrids (new S1 and S2 atm. tides applied)
Wet tropo-sphere
ECMWF Model GFO radiometer radiometer ECMWF Model
DAC MOG2D High Resolution forced with ECMWF pressure and wind fields (S1 and S2excluded) + inverse barometer computed from rectangular grids
Ocean tide GOT4v8 (S1 and S2 are included)Pole tide [Wahr, 1985[69]]]Solid earthtide
Elastic response to tidal potential Cartwright and Tayler, 1971[8] ,Cartwright and Edden,1973[9]
Loading tide GOT4v8 (S1 parameter is included)Sea statebias
Non parametric SSBfrom J1 with unbiased
sigma0
Non parametric SSB[N. Tran et al.,
2010[67]] (using c130 to 172 with GSFC
orbit)
Hybrid SSB (methodfrom Scharroo et al,2004 [63] applied to
al)
Linear model
Orbit error Global multi-mission crossover minimization (Le Traon and Ogor, 1998 [40])LW errors Optimal Interpolation (Le Traon et al., 1998[39])Global Bias Calibrated on TP/J1/J2 Mean Sea LevelMean profile(see V.3.6.1.and V.3.6.2.)
Use ofMSS_CNES_CLS11
[48], referenced[1993,2012]
Computed with 8years of G2 ;referenced
[1993,2012]
Until March 31st,2015 and after August12th 2015: Computed
with 15 years ofE1/E2/EN data;
referenced[1993,2012];
Between April 1st andAugust 11th, 2015:
Use ofMSS_CNES_CLS11
[48], referenced[1993,2012]
Use ofMSS_CNES_CLS11
[48], referenced[1993,2012]
Period of use from cycle 14 cycles 37 to 222 from cycle 1 from cycle 67
Table 8: Corrections and models applied in SL-TAC DT products for Cryosat-2, GFO, AltiKa and HY-2A
The period of reference has changed since April 2014: it is now 20 years instead of 7 years. Please refer tosection V.3.6.1.
c© EU Copernicus Marine Service - Public Page 31

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
V.3.2. Acquisition
The acquisition process in Delayed time consists in a synchronisation process of all the auxiliary data re-quired to homogenize propely the altimeter data sets. The acquisition step uses the GDRs provided by theagencies.
V.3.3. Homogenization
The homogenization process consists of applying the most recent corrections, models and references homo-geneously for all missions and recommended for altimeter products. Each mission is processed separatelyas its needs depend on the base input data. The list of corrections and models currently applied is providedin tables 6 for DT data.
V.3.4. Input data quality control
The Input Data Quality Control is a critical process applied to guarantee that SL-TAC uses only the mostaccurate altimeter data. Thanks to the high quality of current missions, this process rejects a small percent-age of altimeter measurements, but these erroneous data could be the cause of a significant quality loss.The quality control relies on standard raw data editing with quality flags or parameter thresholds, but alsoon complex data editing algorithms based on the detection of erroneous artefacts, mono and multi-missioncrossover validation, and macroscopic statistics to edit out large data flows that do not meet the system’srequirements.
c© EU Copernicus Marine Service - Public Page 32

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
V.3.5. Multi-mission cross-calibration
The Multi-mission Cross-calibration process ensures that all flows from all satellites provide a consistentand accurate information. It removes any residual orbit error (OE, Le Traon and Ogor, 1998[40]), or longwavelength error (LWE, Le Traon et al., 1998[39]), as well as large scale biases and discrepancies betweenvarious data flows.
This process is based on two very different algorithms: a global multi-mission crossover minimization fororbit error reduction (OER), and Optimal Interpolation (OI) for LWE.
Multi-satellite crossover determination is performed on a daily basis. All altimeter fields (measurement,corrections and other fields such as bathymetry, MSS,...) are interpolated at crossover locations and dates.Crossovers are then appended to the existing crossover database as more altimeter data become available.This crossover data set is the input of the Orbit Error Reduction (OER) method. Using the precision of thereference mission orbit (TP/J1/J2), a very accurate orbit error can be estimated.
LWE is mostly due to residual tidal, high frequency ocean signals remaining errors and residual orbit error.The OI used for LWE reduction uses precise parameters derived from:
• accurate statistical description of sea level variability
• regional correlation scales
• mission-specific noise and precise assumptions on the long wavelength errors to be removed (from arecent analysis of one year of data from each mission).
V.3.6. Product generation
The product generation process is composed of four steps: computation of raw SLA, cross-validation,filtering&sub-sampling, and generation of by-products.
c© EU Copernicus Marine Service - Public Page 33

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
V.3.6.1. Change of Reference
As from April 2014, an important modification has been implemented in SL-TAC products. Indeed,the period of reference was 7 years in older version (from 1993 to 1999) and it is now 20 years (from1993 to 2012). This takes into account the variations of the oceans in the last years, as shown on Figure8. The detailed informations can be found in the document: MYO2-SL-QUID-008-017-036-v1.0.pdf andat the following url: http://www.myocean.eu/automne_modules_files/pmedia/public/r2267_9_sltac_technical_note.pdf.In order to give the users the time to adapt to this new reference period, three gridded products are deliveredfor global ocean, Mediterranean and Black seas:SEALEVEL_GLO_REF20YTO7Y_L4_OBSERVATIONS_008_034SEALEVEL_MED_REF20YTO7Y_L4_OBSERVATIONS_008_035andSEALEVEL_BS_REF20YTO7Y_L4_OBSERVATIONS_008_036
If you may wish to come back to the 7 year reference period (=SLA7years): for each measurement ofSLA20years from the new products,
• since the REF20YTO7Y products are gridded, you need to interpolate at the location of the SLAmeasurement the variable ref20yto7y (see IX.5. for information about the format of the file)
• calculate SLA7years=SLA20years from the new products - ref20yto7y previously calculated
Figure 8: Impact in cm of the reference change from 7 years to 20 years ([1993-1999] to [1993-2012])
c© EU Copernicus Marine Service - Public Page 34

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
V.3.6.2. Computation of raw SLA
The SSH anomalies are used in oceanographic studies. They are computed from the difference of the in-stantaneous SSH minus a temporal reference. This temporal reference can be a Mean Profile (MP) in thecase of repeat track or a gridded MSS when the repeat track cannot be used. The errors affecting the SLAs,MPs and MSS have different magnitudes and wavelengths. The computation of the SLAs and their errorsassociated are detailed in Dibarboure et al, 2010 [14].
Use of a Mean ProfileIn the repeat track analysis at 1 Hz (when the satellites flies over a repetitive orbit), measurements are re-sampled along a theoretical ground track (or mean track) associated to each mission. Then a Mean Profile(MP) is subtracted from the re-sampled data to obtain SLA. The MP is a time average of similarly re-sampleddata over a long period.
• The Mean Profile used for Saral/Altika until March 31th, 2015 and after August 12th, 2015 is com-puted with 15 years of ERS-1, ERS-2 and Envisat, referenced to the period [1993, 2012]. BetweenApril 1st and August 11th, 2015, no Mean Profile can be used for AltiKa because the orbit is drifting.The MSS is used instead of the MP (see below).
• The Mean Profile used for T/P (cycles 1 to 364), Jason-1 (cycles 1 to 259) and Jason-2 is computedwith 20 years of T/P, Jason-1 and Jason-2, referenced to years [1993, 2012].
• The Mean Profile used for T/P (cycles 368 to 481) and from Jason-1 cycle 262 to 374 (where satellitesare on interleaved ground-tracks) is computed with 6 years of T/P and Jason-1, referenced to the period[1993, 2012].
• The Mean Profile used for ERS-1 in its 35 days repetitive orbit mission, ERS-2, and Envisat (onlyfor the first orbit, before November 2010) is computed with 15 years of ERS-1, ERS-2 and Envisat,referenced to the period [1993, 2012].
• No Mean Profile can be used for Envisat on its new orbit (enn), Jason-1 on its geodetic orbit (j1g) norfor Cryosat-2 mission (c2). The MSS must be used instead (see below).
• No Mean Profile can be used for HY-2A mission (h2) because there are not enough data to calculateit. The MSS must be used instead (see below).
• The Mean Profile used for GFO is computed with 8 years of G2, referenced to the period [1993,2012].
Computation of a Mean ProfileThe computation of a Mean Profile is not a simple average of similarly co-located SSH data from the sameground track on the maximum period of time as possible .
• Indeed, as the satellite ground track is not perfectly controlled and is often kept in a band of about1km wide, precise cross-track projection and/or interpolation schemes are required to avoid errors.
• The ocean variability is removed to minimize the seasonal/interannual aliasing effects. The mesoscalevariability error is eliminated with an iterative process using a priori knowledge from Sea Level mapsderived from previous iterations or from other missions.This process enables us to reference the meanprofiles for all missions to a common period (reference period) for the sake of consistency with othermissions. The reference period is [1993, 2012] and is thus independent from the number of years usedto compute mean profiles.
c© EU Copernicus Marine Service - Public Page 35

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
• Moreover, the inter-annual variabilty error is accounted for by using the MSS.
• Finally, for these Mean Profiles, the latest standards and a maximum of data were used in order toincrease as much as possible the quality of their estimation (see tables 6 to 8: Corrections and modelsapplied in SSALTO/DUACS Delayed-Time products). Note that a particular care was brought to theprocessing near coasts.
Use of a MSSThe repeat track analysis is impossible for ERS-1 for its 168 days geodetic mission (phases E-F from April1994 to March 1995) or for Envisat since November 2010, for Jason-1 on its geodetic orbit (j1g), for Cryosat-2 mission (c2) and AltiKa mission between April 1st and August 11th, 2015 because the satellite is not ina repetitive orbit phase. Moreover, it is not possible for the moment to compute a mean profile for HY-2Abecause there is not enough data to compute it.. The alternative is to use the MSS instead. The gridded MSSis derived from along track MPs and data from geodetic phases. Thus any error on the MP is also containedin the MSS. There are essentially 4 types of additional errors on gridded MSS which are hard to quantifyseparately:
• To ensure a global MSS coherency between all data sets, the gridding process averages all sensor-specific errors and especially geographically correlated ones.
• The gridding process has to perform some smoothing to make up for signals which cannot be resolvedaway from known track, degrading along-track content.
• There are also errors related to the lack of spatial and temporal data (omission errors).
• The error stemming from the geodetic data: the variability not properly removed before the absorptionin the MSS.
The MSS used in the products is MSS_CNES_CLS11 [48], referenced [1993,2012]
V.3.6.3. Cross validation
After the repeat track analysis, the cross-validation technique is used as the ultimate screening process todetect isolated and slightly erroneous measurements. Small SLA flows are compared to previous and inde-pendent SLA data sets using a- 12 year climatology and a 3 sigma criteria for outlier removal.
c© EU Copernicus Marine Service - Public Page 36

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
V.3.6.4. Filtering and sub-sampling
Residual noise and small scale signals are then removed by filtering the data using a Lanczos filter. As dataare filtered from small scales, a sub-sampling is finally applied. Along-track SLA are then produced (thoseproducts are along-track *vfec* files). Note that in Delayed-time, files *vxxc* are also produced: they arenot filtered and not sub-sampled).The filtering and sub-sampling is adapted to each region and product as a function of the characteristicsof the area and of the assimilation needs. The values taken into account for the filtering are the following:
Filtering Sub-samplingGlobal 65 km 14km for filtered, 7km for unfilteredMediterranean Sea about 40km 14km for filtered, 7km for unfilteredBlack Sea about 40km 14km for filtered, 7km for unfiltered
Table 9: Delayed Time Filtering and sub-sampling values
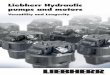
Noise estimationSince April 2014, a new filtering level takes into account the mesoscale capability computed for the Jason-2 1hz SLA. Users recommendations from the TAPAS working group motivated the choice of a spatiallyuniform cut-off length to filter SLA in association with a more accurate measurement error description.Therefore, a cut-off length of 65km is applied everywhere to filter SLA. Compared to the previous SLAfiltering applied, it changes drastically the SLA resolution at low latitudes. In these areas, cut-off lengthsare reduced from more than 100km (see detailed informations in MYO2-SL-QUID-017-036-v1.0).In wavenumber spectra, the 1hz measurement error is the noise level estimated as the mean value of energyat high wavenumbers (below 20km in term of wave length). The 1hz noise level spatial distribution (Figure9) follows the instrumental white-noise linked to the Surface Wave Height but also connections with thebackscatter coefficient. The full understanding of this hump of spectral energy (Dibarboure et al., 2013[12]) still remain to be achieved and overcome with new retracking, new editing strategy or new technology.Users of non-filtered SLA will have to use the 1hz estimated white noise (Figure 9 left) whereas users offiltered SLA the remaining error level after filtering (Figure 9 right).
Figure 9: Noise Level in 1hz Jason-2 SLA estimated from mean wavenumber spectra over 2011 in 10˚x10˚boxes (cm rms) before 65km filtering (left) and after (right)
c© EU Copernicus Marine Service - Public Page 37

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
The regional products as Mediterranean Sea, Black Sea cover too small areas to be concerned by such a mapof 1hz measurement error. In this case, a mean wavenumber spectrum has been computed over each areaand the noise level estimated from it. A constant value is then prescribed for the 1hz noise level as well asthe remaining error after filtering:
Before Filtering After FilteringCryosat-2 2.08 0.84Jason-2 2.36 0.95Saral/AltiKa 1.75 0.71HY-2A 2.52 1.00ERS-1 2.89 1.15ERS-2 3.13 1.24Envisat 2.02 1.81Geosat Follow-on 2.66 1.06Jason-1 2.34 0.94Topex/Poseidon 1.92 0.78
Table 10: Measurement noise error before/ after spatial filtering for Mediterranean and Black Sea products(cms rms)
V.3.7. Generation of gridded Sea Level Anomalies (MSLA) products
V.3.7.1. Merging process
The Merging process is twofold: mapping and generation of by-products.
A mapping procedure using optimal interpolation with realistic correlation functions is applied to produceSLA maps (MSLA or L4 products) at a given date. The procedure generates a combined map mergingmeasurements from all available altimeter missions (Ducet et al., 2000[20]). The mapping process takesinto account an updated suboptimal Optimal Interpolation parameterization to minimize transition artefacts.More accurate correlation scales are used compared to Ducet et al., taking into account optimally the spatialvariability of the signal.Combining data from different missions significantly improves the estimation of mesoscale signals (LeTraon and Dibarboure, 1999[41]), (Le Traon et al., 2001[42]), (Pascual et al., 2006[49]). Several improve-ments were made compared to the version used by (Le Traon et al., 1998[39]). An improved statisticaldescription of sea level variability, noise and long wavelength errors is used. Covariance functions includ-ing propagation velocities that depend on geographical position were thus used. For each grid point, thezonal and meridional spatial scales, the time scale and the zonal and meridional propagation velocities wereadjusted from five years of TP+ERS combined maps. In addition to instrumental noise, a noise of 10% ofthe signal variance was used to take into account the small scale variability which cannot be mapped andshould be filtered in the analysis.
Time windowIn the DT processing, the products can be computed optimally with a centred computation time windowfor OER, LWE and mapping processes (if D is the date of the map, the time intervall of the data taken into
c© EU Copernicus Marine Service - Public Page 38

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
account for the computation of the map is [D-6 weeks, D+6 weeks]).
Number of satellites to compute the mapsThe maps are computed with all the satellites available (up to 4 satellites) for each date. Thus it has the bestpossible sampling. This series is better in quality but not homogeneous over the time period, becauseit is based on the best sampling available in time. The figure 11 lists the missions taken into account forthe computation of the maps. Note that the list of missions is also provided in the gridded file in the globalattribute "platform".
Formal mapping errorThe formal mapping error represents a purely theoretical mapping error. It mainly represents errors inducedby the constellation sampling capability and consistency with the spatial/temporal scales considered, as de-scribed in Le Traon et al (1998) [39] or Ducet et al (2000) [20]. The formal mapping error is expressed inmeters and is delivered in the same NetCDF file as the SLA.
V.3.8. Quality control
The production of homogeneous products with a high quality data and within a short delay is the keyfeature of the SL-TAC processing system. But some events (failure on payload or on instruments, delay,maintenance on servers), can impact the quality of measurements or the data flows. A strict quality controlon each processing step is indispensable to appreciate the overall quality of the system and to provide thebest user services.
V.3.8.1. Final quality Control
The Quality Control is the final process used by SL-TAC before product delivery. In addition to dailyautomated controls and warnings to the operators, each production delivers a large QC Report composed ofdetailed logs, figures and statistics of each processing step. Altimetry experts analyse these reports twice aweek (only for internal validation, those reports are not disseminated).
c© EU Copernicus Marine Service - Public Page 39

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
VI. COPERNICUS SL-TAC PRODUCTS
VI.1. Near Real Time Products
The purpose of the NRT component is the acquisition of altimeter data from various altimeter missions innear-real time (i.e. within a few days at most) and in real-time for global area on all satellites (i.e. withina few hours), the validation and correction of these altimeter data sets (i.e edition and selection, update ofcorrections and homogenization, orbit error reduction) in order to produce each day along-track productsand gridded products.Exploitation of real time OGDR/FDGDR data allows the DUACS system to produce multi-mission mapswith 0-day and 3-day delay whereas historical NRT (IGDR-based) production have a 6-day delay (inducedby historical trade-off in terms of timeliness vs quality).The quality measurements in the NRT processing is more sensitive to the number of altimeter missions in-volved in the system. This is mainly due to the orbit error and the non-centered processing time-window (inNRT case, "future" data are not available; the computation time window takes into account only the 6 weeksbefore the date).If two altimeters are acknowledged as the bare minimum needed to observe mesoscale signals in DT maps,three or even four missions are needed to obtain equivalent accuracy in NRT (Pascual et al., 2006[49]).
As described in V.2.6.4. and V.2.6.1. time invariant products are also disseminated:
• SEALEVEL_GLO_NOISE_L4_NRT_OBSERVATIONS_008_032 describes the noise level of along-track measurements delivered. This is a gridded product. One file is provided for the global oceanand those values must be applied for Arctic and Europe products. For Mediterranean and Black seas,one value is given, as described in the following table.
• SEALEVEL_*_REF20YTO7Y_L4_OBSERVATIONS_008_* is provided temporarily for the needsof users who are still working with the reference period of 7 years instead of 20 years (see V.2.6.1.).This is a gridded product. There are three zones provided: global ocean, Mediterranean and Blackseas. For Arctic and Europe areas, the file to be taken into account is the global product.
Along-track Sea level anomalyNRT SLA
(SEALEVEL_*_SLA_L3_NRT_OBSERVATIONS_008_*)
Gridded Sea level anomalyNRT MSLA
(SEALEVEL_*_SLA_MAP_L4_NRT_OBSERVATIONS_008_*)
Global X XMediterranean X XBlack Sea X XArctic X Not deliveredEurope X Not delivered
Table 11: List of the time varying products in NRT
c© EU Copernicus Marine Service - Public Page 40

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
Gridded Noise on SLANRT NOISE SLA
(SEALEVEL_GLO_NOISE_L4_NRT_OBSERVATIONS_008_*)
Gridded Change of referenceCHANGE REF SLA
(SEALEVEL_*_REF20YTO7Y_L4_OBSERVATIONS_008_*)
Global X XMediterranean see table 5 XBlack Sea see table 5 XArctic Same as global Same as globalEurope Same as global Same as global
Table 12: List of the time invariant products in NRT
VI.1.1. Delay of the products
The availability of the products in near real time is
• for along-track products: three to twelve hours after the measurement for regional products and 2hours for global Saral, and Jason-2 products and 3 hours for global Cryosat-2 products.
• for gridded products: day-0, day-3 and day-6 days.
Those products are delivered every day.
Three merged maps are produced daily, each with a different delay and quality:
• A 6-day delay, which represents a final NRT map production,
• A 3-day delay, which represents an intermediate map production,
• and a 0-day delay, which represents a preliminary map production, based on IGDR+OGDR produc-tion.
Then, these maps are replaced when a better quality data is available:
• At d0+3, the intermediate map replaces the preliminary map which was produced at d0.
• At d0+3, the final NRT map replaces the intermediate map which was produced at d0.
• At d0+6, the intermediate map replaces the preliminary map which was produced at d0+3.
• At d0+6, the final NRT map replaces the preliminary map which was produced at d0.
c© EU Copernicus Marine Service - Public Page 41

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
Figure 10: Three merged maps are produced daily: final map (d-6), intermediate map (d-3) and preliminarymap (d0)
VI.1.2. Temporal availibility
The following table presents the available products by mission and by data period:Near real time products:
NRT Jason-2 Cryosat-2 Saral/AltiKa HY-2A Merged
Temporal Timeavailability
y/m∗
ongoingy/m∗
ongoingy/m∗
ongoingy/m∗
ongoingy/m∗
ongoing
NRT-SLA X X X X
NRT-MSLA X
VI.2. Delayed Time Products
The Delayed Time component of SL-TAC system is responsible for the production of processed HY-2A,Saral/AltiKa, Cryosat-2, Jason-1, Jason-2, T/P, Envisat, GFO, ERS1/2 data in order to provide a homoge-neous, inter-calibrated and highly accurate long time series of SLA .DT products are more precise than NRT products. Two reasons explain this quality difference. The firstone is the better intrinsic quality of the POE orbit used in the GDR processing. The second reason is thatin the DT DUACS processing, the products can be computed optimally with a centred computation timewindow for OER, LWE . On the contrary in NRT case, "future" data are not available so the computationtime window is not centred and therefore not optimal.As for NRT products, improved altimeter corrections and processing algorithms are used: ocean tide modelto correct altimeter data, improved methods for orbit error reduction and mapping.
As described in V.3.6.4. and V.3.6.1. time invariant products are also disseminated:
c© EU Copernicus Marine Service - Public Page 42

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
• SEALEVEL_GLO_NOISE_L4_REP_OBSERVATIONS_008_033 describes the noise level of along-track measurements delivered. This is a gridded product delivered only on global ocean. For eachmission two files are provided: one for filtered products and one for unfiltered products. For Mediter-ranean and Black seas, one value is given, as described in the following table.
• SEALEVEL_*_REF20YTO7Y_L4_OBSERVATIONS_008_* is provided temporarily for the needsof users who are still working with the reference period of 7 years instead of 20 years (see V.3.6.1.).This is a gridded product. There are three zones provided: global, Mediterranean and Black seas.
Along-track Sea level anomalyREP SLA
(SEALEVEL_*_SLA_L3_REP_OBSERVATIONS_008_*)
Gridded Sea level anomalyREP MSLA
(SEALEVEL_*_SLA_MAP_L4_REP_OBSERVATIONS_008_*)
Global filtered X X
Global unfiltered X -
Mediterranean filtered X X
Mediterranean unfiltered X -
Black Sea filtered X X
Black Sea unfiltered X -
Table 13: List of the time varying products in Delayed Time
Gridded Noise on SLAREP NOISE SLA
(SEALEVEL_GLO_NOISE_L4_REP_OBSERVATIONS_008_*)
Gridded Change of referenceCHANGE REF SLA
(SEALEVEL_*_REF20YTO7Y_L4_OBSERVATIONS_008_*)
Global filtered X X
Global unfiltered X Same as filtered
Mediterranean filtered see table 10 X
Mediterranean unfiltered see table 10 Same as filtered
Black Sea filtered see table 10 X
Black Sea unfiltered see table 10 Same as filtered
Table 14: List of the time invariant products in Delayed Time
c© EU Copernicus Marine Service - Public Page 43

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
VI.2.1. Delay of the products
Daily products are delivered. The availability of the products in delayed time is at the best two months afterthe date of the measurement. The product generation needs all the GDR data of all the missions to take intoaccount the best corrections as possible. The time delay can be longer in the case of a missing mission.
c© EU Copernicus Marine Service - Public Page 44

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
VI.2.2. Temporal availibility
The following table presents the available products by mission and by data period:
Temporal availibility DT-SLA DT-MSLA
begin date end date
HY-2A 2014/04 y/m∗ X
Saral/AltiKa 2013/03 y/m∗ X
Cryosat-2 2012/04 y/m∗ X
Jason-2 2008/10 y/m∗ X
Jason-1 geodetic∗∗ 2012/06 2013/04 X
Jason-1 new∗∗ 2009/02 2012/03 X
Jason-1 2002/04 2008/10 X
GFO 2000/01 2008/09 X
Envisat new∗∗ 2010/10 2012/08 X
Envisat 2002/10 2010/10 X
ERS-1/ERS-2∗∗ 1992/10 2003/04 X
Topex new∗∗ 2002/09 2005/10 X
Topex 1992/09 2002/04 X
Merged 1992/09 y/m∗ X
∗ y/m: those dates are updated regularly (3 to 4 times per year) and are avalaible when you download the dataat http://marine.copernicus.eu/web/69-myocean-interactive-catalogue.php∗∗ Jason-1 geodetic orbit: starting 2012/05, Jason-1 new orbit : starting 2009/02, Envisat new orbit : starting 2010/10,T/P new orbit : starting 2002/09, ERS-1: Geodetic phases (E-F) are included. No ERS-1 data between December 23,1993 and April 10, 1994 (ERS-1 phase D - 2nd ice phase).
The merged products were obtained with the satellites given in figure 11. Moreover, the global attribute in the griddedfile called "platform" gives the list of satellites used to compute the map.
c© EU Copernicus Marine Service - Public Page 45

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
Figure 11: List of satellites in all-sat-merged products
c© EU Copernicus Marine Service - Public Page 46

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
VII. DESCRIPTION OF THE PRODUCT SPECIFICATION
VII.1. General information
VII.1.1. Along-track Sea Level Anomalies
Product Specification SEALEVEL_GLO_SLA_L3_NRT_OBSERVATIONS_008_017
SEALEVEL_GLO_SLA_L3_REP_OBSERVATIONS_008_018
Geographical coverage global
Variables latitude
longitude
SLA
track
time
flag
cycle
Near Real time Yes
Reanalysis Yes
Available time series see sections VI.2.2. for REP and VI.1.2. for NRT
Temporal resolution Daily
Target delivery time 3-4 months for REP and up to 10 times a day for NRT
Delivery mechanism CMEMS Information System
Horizontal resolution 14km for filtered, 7km for unfiltered
Number of vertical levels 1
Format Netcdf CF1.6
SEALEVEL_GLO_SLA_L3_NRT_OBSERVATIONS_008_017 andSEALEVEL_GLO_SLA_L3_REP_OBSERVATIONS_008_018 Product Specification
c© EU Copernicus Marine Service - Public Page 47

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
Product Specification SEALEVEL_MED_SLA_L3_NRT_OBSERVATIONS_008_019
SEALEVEL_MED_SLA_L3_REP_OBSERVATIONS_008_020
Geographical coverage 6˚W-37˚E ; 30˚N-46˚N
Variables latitude
longitude
SLA
track
time
flag
cycle
Near Real time Yes
Reanalysis Yes
Available time series see sections VI.2.2. for REP and VI.1.2. for NRT
Temporal resolution Daily
Target delivery time 3-4 months for REP and daily for NRT
Delivery mechanism CMEMS Information System
Horizontal resolution 14km for filtered, 7km for unfiltered
Number of vertical levels 1
Format Netcdf CF1.6
SEALEVEL_MED_SLA_L3_NRT_OBSERVATIONS_008_019 andSEALEVEL_MED_SLA_L3_REP_OBSERVATIONS_008_020 Product Specification
c© EU Copernicus Marine Service - Public Page 48

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
Product Specification SEALEVEL_BS_SLA_L3_NRT_OBSERVATIONS_008_022
SEALEVEL_BS_SLA_L3_REP_OBSERVATIONS_008_023
Geographical coverage 27˚E-42˚E ; 40˚N-47˚N
Variables latitude
longitude
SLA
track
time
flag
cycle
Near Real time Yes
Reanalysis Yes
Available time series see sections VI.2.2. for REP and VI.1.2. for NRT
Temporal resolution Daily
Target delivery time 3-4 months for REP and daily for NRT
Delivery mechanism CMEMS Information System
Horizontal resolution 7km
Number of vertical levels 1
Format Netcdf CF1.6
SEALEVEL_BS_SLA_L3_NRT_OBSERVATIONS_008_022 andSEALEVEL_BS_SLA_L3_REP_OBSERVATIONS_008_023 Product Specification
c© EU Copernicus Marine Service - Public Page 49

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
Product Specification SEALEVEL_EUR_SLA_L3_NRT_OBSERVATIONS_008_024
Geographical coverage 25˚W-42˚E ; 21˚N-66˚N
Variables latitude
longitude
SLA
track
time
flag
cycle
Near Real time Yes
Reanalysis Yes
Available time series see section VI.1.2.
Temporal resolution Daily for NRT
Target delivery time daily for NRT
Delivery mechanism CMEMS Information System
Horizontal resolution 7km
Number of vertical levels 1
Format Netcdf CF1.6
SEALEVEL_EUR_SLA_L3_NRT_OBSERVATIONS_008_024 Product Specification
c© EU Copernicus Marine Service - Public Page 50

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
Product Specification SEALEVEL_ARC_SLA_L3_NRT_OBSERVATIONS_008_025
Geographical coverage 0˚W-360˚E ; 50˚N-82˚N
Variables latitude
longitude
SLA
track
time
flag
cycle
Near Real time Yes
Reanalysis Yes
Available time series see section VI.1.2.
Temporal resolution Daily for NRT
Target delivery time daily for NRT
Delivery mechanism CMEMS Information System
Horizontal resolution 14km for filtered, 7km for unfiltered
Number of vertical levels 1
Format Netcdf CF1.6
SEALEVEL_ARC_SLA_L3_NRT_OBSERVATIONS_008_025 Product Specification
c© EU Copernicus Marine Service - Public Page 51

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
VII.1.2. Gridded Sea Level Anomalies
Product Specification SEALEVEL_GLO_SLA_MAP_L4_NRT_OBSERVATIONS_008_026
SEALEVEL_GLO_SLA_MAP_L4_REP_OBSERVATIONS_008_027
Geographical coverage global
Variables time
lat
lon
sla
err
Near Real time Yes
Reanalysis Yes
Available time series see sections VI.2.2. for REP and VI.1.2. for NRT
Temporal resolution Daily
Target delivery time 3-4 months for REP and daily for NRT
Delivery mechanism CMEMS Information System
Horizontal resolution 0.25˚x0.25˚
Number of vertical levels 1
Format Netcdf CF1.6
SEALEVEL_GLO_SLA_MAP_L4_NRT_OBSERVATIONS_008_026 andSEALEVEL_GLO_SLA_MAP_L4_REP_OBSERVATIONS_008_027 Product Specification
c© EU Copernicus Marine Service - Public Page 52

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
Product Specification SEALEVEL_MED_SLA_MAP_L4_NRT_OBSERVATIONS_008_028
SEALEVEL_MED_SLA_MAP_L4_REP_OBSERVATIONS_008_029
Geographical coverage 6˚W-37˚E ; 30˚N-46˚N
Variables time
lat
lon
sla
err
Near Real time Yes
Reanalysis Yes
Available time series see sections VI.2.2. for REP and VI.1.2. for NRT
Temporal resolution Daily
Target delivery time 3-4 months for REP and daily for NRT
Delivery mechanism CMEMS Information System
Horizontal resolution 0.125˚x0.125˚
Number of vertical levels 1
Format Netcdf CF1.6
SEALEVEL_MED_SLA_MAP_L4_NRT_OBSERVATIONS_008_028 andSEALEVEL_MED_SLA_MAP_L4_REP_OBSERVATIONS_008_029 Product Specification
c© EU Copernicus Marine Service - Public Page 53

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
Product Specification SEALEVEL_BS_SLA_MAP_L4_NRT_OBSERVATIONS_008_030
SEALEVEL_BS_SLA_MAP_L4_REP_OBSERVATIONS_008_031
Geographical coverage 27˚E-42˚E ; 40˚N-47˚N
Variables time
lat
lon
sla
err
Near Real time Yes
Reanalysis Yes
Available time series see sections VI.2.2. for REP and VI.1.2. for NRT
Temporal resolution Daily
Target delivery time 3-4 months for REP and daily for NRT
Delivery mechanism CMEMS Information System
Horizontal resolution 0.125˚x0.125˚
Number of vertical levels 1
Format Netcdf CF1.6
SEALEVEL_BS_SLA_MAP_L4_NRT_OBSERVATIONS_008_030 andSEALEVEL_BS_SLA_MAP_L4_REP_OBSERVATIONS_008_031 Product Specification
c© EU Copernicus Marine Service - Public Page 54

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
VII.1.3. Gridded Noise on Sea Level Anomalies
Product Specification SEALEVEL_GLO_NOISE_L4_NRT_OBSERVATIONS_008_032
SEALEVEL_GLO_NOISE_L4_REP_OBSERVATIONS_008_033
Geographical coverage global
Variables lat
lon
noise
lat_bnds
lon_bnds
crs
Near Real time Yes
Reanalysis Yes
Available time series They are time invariant
Temporal resolution /
Target delivery time /
Delivery mechanism CMEMS Information System
Horizontal resolution 2˚x2˚
Number of vertical levels 1
Format Netcdf CF1.6
SEALEVEL_GLO_NOISE_L3_NRT_OBSERVATIONS_008_032 andSEALEVEL_GLO_NOISE_L3_REP_OBSERVATIONS_008_033 Product Specification
c© EU Copernicus Marine Service - Public Page 55

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
Product Specification SEALEVEL_GLO_REF20YTO7Y_L4_OBSERVATIONS_008_034
Geographical coverage global
Variables lat
lon
ref20yto7y
lat_bnds
lon_bnds
crs
Near Real time Yes
Reanalysis Yes
Available time series Time invariant product
Temporal resolution /
Target delivery time /
Delivery mechanism CMEMS Information System
Horizontal resolution 0.25˚x0.25˚
Number of vertical levels 1
Format Netcdf CF1.6
SEALEVEL_GLO_REF20YTO7Y_L4_OBSERVATIONS_008_034 Product Specification
c© EU Copernicus Marine Service - Public Page 56

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
Product Specification SEALEVEL_BS_REF20YTO7Y_L4_OBSERVATIONS_008_036
Geographical coverage 27˚E-42˚E; 40˚N-47˚N
Variables lat
lon
ref20yto7y
lat_bnds
lon_bnds
crs
Near Real time Yes
Reanalysis Yes
Available time series Time invariant product
Temporal resolution /
Target delivery time /
Delivery mechanism CMEMS Information System
Horizontal resolution 0.125˚x0.125˚
Number of vertical levels 1
Format Netcdf CF1.6
SEALEVEL_BS_REF20YTO7Y_L4_OBSERVATIONS_008_036 Product Specification
c© EU Copernicus Marine Service - Public Page 57

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
VIII. NOMENCLATURE OF FILES
VIII.1. Nomenclature of files downloaded through the CMEMS Web Portaldownload Service
VIII.1.1. Nomenclature of the Along Track Sea Level Anomalies
VIII.1.1.1. Nomenclature of the datasets
The nomenclature used is:
dataset-duacs-<delay>-<zone>-<mission>-<type of sla>-l3-v4where the fileds in "<>" are described below:
delay nrt near-real time productsrep delayed time products
zone global global geographic coverage productmedsea Mediterranean productsblacksea Black Sea productsarctic Arctic products (only for nrt)europe Europe products (only for nrt)
mission e1 ERS-1 (only for rep)e2 ERS-2 (only for rep)tp TOPEX/Poseidon (only for rep)tpn TOPEX/Poseidon on its new orbit (only for rep)g2 GFO (only for rep)j1 Jason-1 (only for rep)j1n Jason-1 on its new orbit (only for rep)j1g Jason-1 on its geodetic orbit(only for rep)j2 Jason-2en Envisat (only for rep)enn Envisat on its new orbit (only for rep)c2 Cryosat-2al Saral/AltiKah2 HY-2A
type of sla sla filtered slasla_unfiltered non filtered sla (only for rep products)
Note that for REP products, a new dataset is created each time there is a change of orbit of the mission (for ex-ample j1, j1n, j1g). In the case of NRT products, it is chosen to keep the same dataset name in order to minimize theimpact for the users, especialy for operational activities. As a consequence :
• the time reactivity is shorter to implement the change both on production side and on end-user side,
• it simplifies the access of products for the end-users.
c© EU Copernicus Marine Service - Public Page 58

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
VIII.1.1.2. Nomenclature of the NetCdf files
The nomenclature used is:
<delay>_<zone>_<mission>_sla_<variable>_<date>_<dateprod>.<format> where the fileds in "<>" are described be-low:
delay nrt near-real time productsdt delayed time products
zone global global geographic coverage productmed Mediterranean productsblacksea Black Sea productsarctic Arctic products (only for nrt)europe Europe products (only for nrt)
mission e1 ERS-1e2 ERS-2tp TOPEX/Poseidontpn TOPEX/Poseidon on its new orbitg2 GFOj1 Jason-1j1n Jason-1 on its new orbitj1g Jason-1 on its geodetic orbitj2 Jason-2en Envisatenn Envisat on its new orbitc2 Cryosat-2al Saral/AltiKah2 HY-2A
variable vfec filtered and sub-sampled slavxxc non filtered and non sub-sampled sla (only for rep)
date YYYYMMDD(*) date of the datasetdateprod YYYYMMDD production date of the datasetformat .nc.gz compressed NetCdf CF1.6
(*) For rep data: as the dates in the file names are rounded, the user wanting data for date T has to read the filescontaining dates T+1 and T-1 in their name and check inside the files if there are some data for date T.
c© EU Copernicus Marine Service - Public Page 59

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
VIII.1.2. Nomenclature of the Gridded Sea Level Anomalies
VIII.1.2.1. Nomenclature of the datasets
The nomenclature used is:
dataset-duacs-<delay>-<zone>-merged-allsat-msla-l4where the fileds in "<>" are described below:
delay nrt near-real time productsrep delayed time products
zone global global geographic coverage productmedsea Mediterranean productsblacksea Black Sea products
VIII.1.2.2. Nomenclature of the NetCdf files
The nomenclature used is:
<delay>_<zone>_allsat_smla_h_<datemap>_<dateprod>.<format> where the fileds in "<>" are described below:
delay nrt near-real time productsdt delayed time products
zone global global geographic coverage productmed Mediterranean products (for dt)blacksea Black Sea products
datemap YYYYMMDD date of the mapdateprod YYYYMMDD production date of the mapformat .nc.gz compressed NetCdf CF1.6
c© EU Copernicus Marine Service - Public Page 60

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
VIII.1.3. Nomenclature of the Gridded noise of Sea Level Anomalies
VIII.1.3.1. Nomenclature of the datasets
The nomenclature used is:
dataset-duacs-<delay>-<zone>-<mission>-<type of sla>-l4-v4where the fileds in "<>" are described below:
delay nrt near-real time productsrep delayed time products
zone global global geographic coverage productmission e1 ERS-1 (only for rep)
e2 ERS-2 (only for rep)tp TOPEX/Poseidon (only for rep)tpn TOPEX/Poseidon on its new orbit (only for
rep)g2 GFO (only for rep)j1 Jason-1 (only for rep)j1n Jason-1 on its new orbit (only for rep)j1g Jason-1 on its geodetic orbit (only for rep)j2 Jason-2en Envisat (only for rep)enn Envisat on its new orbit (only for rep)c2 Cryosat-2al Saral/AltiKah2 HY-2A
type of sla sla filtered slasla_unfiltered non filtered sla (only for rep products)
c© EU Copernicus Marine Service - Public Page 61

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
VIII.1.3.2. Nomenclature of the NetCdf files
The nomenclature used is:
<delay>_<zone>_<mission>_sla_noise_<variable>.<format> where the fileds in "<>" are described below:
delay nrt near-real time productsdt delayed time products
zone global global geographic coverage productmission e1 ERS-1
e2 ERS-2tp TOPEX/Poseidontpn TOPEX/Poseidon on its new orbitg2 GFOj1 Jason-1j1n Jason-1 on its new orbitj1g Jason-1 on its geodetic orbitj2 Jason-2en Envisatenn Envisat on its new orbitc2 Cryosat-2al Saral/AltiKah2 HY-2A
variable vfec filtered and sub-sampled slavxxc non filtered and non sub-sampled sla (only
for rep)format .nc.gz compressed NetCdf CF1.6
c© EU Copernicus Marine Service - Public Page 62

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
VIII.1.4. Nomenclature of the Gridded change of reference products
VIII.1.4.1. Nomenclature of the datasets
The nomenclature used is:
dataset-duacs-<zone>-ref20yto7y-l4-v4where the fileds in "<>" are described below:
zone global global geographic coverage productmedsea Mediterranean productsblacksea Black Sea products
VIII.1.4.2. Nomenclature of the NetCdf files
The nomenclature used is:
<zone>_ref20yto7y.<format> where the fileds in "<>" are described below:
zone global global geographic coverage productmed Mediterranean products (for dt)blacksea Black Sea products
format .nc.gz compressed NetCdf CF1.6
c© EU Copernicus Marine Service - Public Page 63

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
IX. DATA FORMAT
This chapter presents the data storage format used for CMEMS products.
IX.1. NetCdf
The products are stored using the NetCDF format. NetCDF (network Common Data Form) is an interface for array-oriented data access and a library that provides an implementation of the interface. The netCDF library also definesa machine-independent format for representing scientific data. Together, the interface, library, and format support thecreation, access, and sharing of scientific data. The netCDF software was developed at the Unidata Program Center inBoulder, Colorado. The netCDF libraries define a machine-independent format for representing scientific data. Pleasesee Unidata NetCDF pages for more information, and to retreive NetCDF software package on:http://www.unidata.ucar.edu/packages/netcdf/index.html.
NetCDF data is:
• Self-Describing. A netCDF file includes information about the data it contains.
• Architecture-independent. A netCDF file is represented in a form that can be accessed by computers with dif-ferent ways of storing integers, characters, and floating-point numbers.
• Direct-access. A small subset of a large dataset may be accessed efficiently, without first reading through allthe preceding data.
• Appendable. Data can be appended to a netCDF dataset along one dimension without copying the dataset orredefining its structure. The structure of a netCDF dataset can be changed, though this sometimes causes thedataset to be copied.
• Sharable. One writer and multiple readers may simultaneously access the same netCDF file.
IX.2. Structure and semantic of NetCDF along-track (L3) files
The NetCDF Sea Level TAC files are based on the attribute data tags defined by the Cooperative Ocean/AtmosphereResearch Data Service (COARDS) and Climate and Forecast (CF) metadata conventions. The CF convention gener-alises and extends the COARDS convention but relaxes the COARDS constraints on dimension and order and specifiesmethods for reducing the size of datasets.A wide range of software is available to write or read NetCDF/CF files. API are made available by UNIDATA(http://www.unidata.ucar.edu/software/netcdf):
• C/C++/Fortran
• Java
• MATLAB, Objective-C, Perl, Python, R, Ruby, Tcl/Tk
In addition to these conventions, the files are using a common structure and semantic:
• 1 dimension is defined:
– time: it is used to check NetCDF variables depending on time.
c© EU Copernicus Marine Service - Public Page 64

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
• 6 variables are defined:
– short SLA : contains the Sea Level Anomaly values for each time given,
– int longitude : contains the longitude for each measurement,
– int latitude : contains the latitude for each measurement,
– short track : contains the track number for each measurement,
– double time : contains the time in days since 1950-01-01 00:00:00 UTC for each measurement,
– short flag : only for NRT products. flag=0, the processed data comes from OGDR; if flag=1, the processeddata comes from the IGDR
– short cycle : contains the cycle number for each measurement.
• global attributes:
– the global attributes gives information about the creation of the file.
Example of a NetCDF sla file:
netcdf nrt_global_al_sla_vfec_20151107_20151113 {dimensions:
time = 21747 ;variables:
double time(time) ;time:axis = "T" ;time:calendar = "gregorian" ;time:long_name = "Time of measurement" ;time:standard_name = "time" ;time:units = "days since 1950-01-01 00:00:00" ;
int longitude(time) ;longitude:add_offset = 0. ;longitude:long_name = "Longitude of measurement" ;longitude:scale_factor = 1.e-06 ;longitude:standard_name = "longitude" ;longitude:units = "degrees_east" ;
int latitude(time) ;latitude:add_offset = 0. ;latitude:long_name = "Latitude of measurement" ;latitude:scale_factor = 1.e-06 ;latitude:standard_name = "latitude" ;latitude:units = "degrees_north" ;
short cycle(time) ;cycle:coordinates = "longitude latitude" ;cycle:long_name = "Cycle the measurement belongs to" ;cycle:units = "1" ;
short track(time) ;track:coordinates = "longitude latitude" ;track:long_name = "Track in cycle the measurement belongs to" ;track:units = "1" ;
short flag(time) ;flag:_FillValue = 32767s ;flag:comment = "The origin of the data is determined by the types of geophysicaldata records (GDR) used in computation of the SLA: 1for the Interim GDR (IGDR) and 0 for Operational GDR (OGDR)." ;flag:coordinates = "longitude latitude" ;flag:long_name = "data origin" ;
c© EU Copernicus Marine Service - Public Page 65

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
flag:units = "1" ;short SLA(time) ;
SLA:_FillValue = 32767s ;SLA:add_offset = 0. ;SLA:coordinates = "longitude latitude" ;SLA:long_name = "Sea Level Anomaly" ;SLA:scale_factor = 0.001 ;SLA:standard_name = "sea_surface_height_above_sea_level" ;SLA:units = "m" ;
// global attributes::Conventions = "CF-1.6" ;:Metadata_Conventions = "Unidata Dataset Discovery v1.0" ;:cdm_data_type = "Swath" ;:comment = "Sea Level Anomalies referenced to the [1993, 2012] period" ;:contact = "[email protected]" ;:creator_email = "[email protected]" ;:creator_name = "CMEMS - Sea Level Thematic Assembly Center" ;:creator_url = "http://marine.copernicus.eu" ;:date_created = "2015-11-12T23:45:19Z" ;:date_issued = "2015-11-12T23:45:19Z" ;:date_modified = "2015-11-12T23:45:19Z" ;:geospatial_lat_max = 81.502301 ;:geospatial_lat_min = -77.374468 ;:geospatial_lat_resolution = "0.028612" ;:geospatial_lat_units = "degrees_north" ;:geospatial_lon_max = 359.884113 ;:geospatial_lon_min = 0.026342 ;:geospatial_lon_resolution = "0.035591" ;:geospatial_lon_units = "degrees_east" ;:geospatial_vertical_max = 0. ;:geospatial_vertical_min = 0. ;:geospatial_vertical_positive = "down" ;:geospatial_vertical_resolution = "point" ;:geospatial_vertical_units = "m" ;:history = "2015-11-12T23:45:19Z: Created by DUACS NRT V1.2.post85" ;:institution = "CLS, CNES" ;:keywords = "Oceans > Ocean Topography > Sea Surface Height" ;:keywords_vocabulary = "NetCDF COARDS Climate and Forecast Standard Names" ;:license = "http://marine.copernicus.eu/web/27-service-commitments-and-licence.php" ;:platform = "Altika" ;:processing_level = "L3" ;:product_version = "15.4.1" ;:project = "COPERNICUS MARINE ENVIRONMENT MONITORING SERVICE (CMEMS)" ;:references = "http://marine.copernicus.eu" ;:source = "Altika measurements" ;:ssalto_duacs_comment = "OSTM/Jason-2 is the reference mission used forthe altimeter inter-calibration processing" ;:standard_name_vocabulary = "NetCDF Climate and Forecast (CF) MetadataConvention Standard Name Table v28" ;:summary = "Near-Real-Time Level-3 global sea surface height aboveMean Sea Surface products from Altika observations over Global Ocean." ;:time_coverage_duration = "P23H59M57.194080S" ;:time_coverage_end = "2015-11-07T23:59:58Z" ;:time_coverage_resolution = "P1S" ;:time_coverage_start = "2015-11-07T00:00:01Z" ;
c© EU Copernicus Marine Service - Public Page 66

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
:title = "NRT Altika Global Ocean Along track Sea Level Anomalies L3 product" ;}
c© EU Copernicus Marine Service - Public Page 67

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
IX.3. Structure and semantic of NetCDF maps (L4) files
The NetCDF Sea Level TAC files are based on the attribute data tags defined by the Cooperative Ocean/AtmosphereResearch Data Service (COARDS) and Climate and Forecast (CF) metadata conventions. The CF convention gener-alises and extends the COARDS convention but relaxes the COARDS constraints on dimension and order and specifiesmethods for reducing the size of datasets.A wide range of software is available to write or read NetCDF/CF files. API are made available by UNIDATA(http://www.unidata.ucar.edu/software/netcdf):
• C/C++/Fortran
• Java
• MATLAB, Objective-C, Perl, Python, R, Ruby, Tcl/Tk
In addition to these conventions, the files are using a common structure and semantic:
• 4 Dimensions are defined:
– time: date of the map,
– lat: contains the latitude of grid points ,
– lon: contains the longitude of grid points,
– nv: used for mapping conventions
• 8 or 9 Variables are used for all grids defined below:
– float time : contains the time in days since 1950-01-01 00:00:00 UTC,
– float lat : contains the latitude for each measurement,
– float lon : contains the longitude for each measurement,
– float lat_bnds : contains the min and max in latitude of each box,
– float lon_bnds : contains the min and max in longitude of each box,
– int crs: used for mapping conventions
– the fields used for msla_h files are:
∗ int sla: contains the eea level anomalies of the measurements and∗ int err: contains the formal mapping error in meters
• global attributes:
– the global attributes gives information about the creation of the file. Not that there is a new global attributecalled "platform" indicating the list of satellites taken into account to compute the maps.
Example of NetCDF msla_h file:
netcdf dt_global_allsat_msla_h_20121205_20140106 {dimensions:
time = 1 ;lat = 720 ;lon = 1440 ;nv = 2 ;
variables:int crs ;
crs:comment = "This is a container variable that describes the grid_mappingused by the data in this file. This variable does not contain any data; onlyinformation about the geographic coordinate system." ;
c© EU Copernicus Marine Service - Public Page 68

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
crs:grid_mapping_name = "latitude_longitude" ;crs:inverse_flattening = 298.257 ;crs:semi_major_axis = 6378136.3 ;
float time(time) ;time:axis = "T" ;time:calendar = "gregorian" ;time:long_name = "Time" ;time:standard_name = "time" ;time:units = "days since 1950-01-01 00:00:00" ;
float lat(lat) ;lat:axis = "Y" ;lat:bounds = "lat_bnds" ;lat:long_name = "Latitude" ;lat:standard_name = "latitude" ;lat:units = "degrees_north" ;lat:valid_max = 89.875 ;lat:valid_min = -89.875 ;
float lat_bnds(lat, nv) ;lat_bnds:comment = "latitude values at the north and south bounds of each pixel." ;lat_bnds:units = "degrees_north" ;
float lon(lon) ;lon:axis = "X" ;lon:bounds = "lon_bnds" ;lon:long_name = "Longitude" ;lon:standard_name = "longitude" ;lon:units = "degrees_east" ;lon:valid_max = 359.875 ;lon:valid_min = 0.125 ;
float lon_bnds(lon, nv) ;lon_bnds:comment = "longitude values at the west and east bounds of each pixel." ;lon_bnds:units = "degrees_north" ;
int nv(nv) ;nv:comment = "Vertex" ;nv:units = "1" ;
int sla(time, lat, lon) ;sla:_FillValue = -2147483647 ;sla:coordinates = "lon lat" ;sla:grid_mapping = "crs" ;sla:long_name = "Sea Level Anomalies" ;sla:scale_factor = 0.0001 ;sla:standard_name = "sea_surface_height_above_sea_level" ;sla:units = "m" ;
int err(time, lat, lon) ;err:_FillValue = -2147483647 ;err:comment = "The formal mapping error represents a purely theoreticalmapping error. It mainly traduces errors induced by the constellation samplingcapability and consistency with the spatial/temporal scales considered,as described in Le Traon et al (1998) or Ducet et al (2000)" ;err:coordinates = "lon lat" ;err:grid_mapping = "crs" ;err:long_name = "Formal mapping error" ;err:scale_factor = 0.0001 ;err:units = "m" ;
// global attributes::Conventions = "CF-1.6" ;
c© EU Copernicus Marine Service - Public Page 69

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
:Metadata_Conventions = "Unidata Dataset Discovery v1.0" ;:cdm_data_type = "Grid" ;:comment = "Sea Level Anomalies referenced to the [1993, 2012] period" ;:contact = "[email protected]" ;:creator_email = "[email protected]" ;:creator_name = "CMEMS - Sea Level Thematic Assembly Center" ;:creator_url = "http://marine.copernicus.eu" ;:date_created = "2015-11-12 23:58:44Z" ;:date_issued = "2015-11-12 23:58:44Z" ;:date_modified = "2015-11-12 23:58:44Z" ;:geospatial_lat_max = 89.875 ;:geospatial_lat_min = -89.875 ;:geospatial_lat_resolution = 0.25 ;:geospatial_lat_units = "degrees_north" ;:geospatial_lon_max = 359.875 ;:geospatial_lon_min = 0.125 ;:geospatial_lon_resolution = 0.25 ;:geospatial_lon_units = "degrees_east" ;:geospatial_vertical_max = 0. ;:geospatial_vertical_min = 0. ;:geospatial_vertical_positive = "down" ;:geospatial_vertical_resolution = "point" ;:geospatial_vertical_units = "m" ;:history = "2015-11-12 23:58:45Z: Created by DUACS NRT V1.2.post85" ;:institution = "CLS, CNES" ;:keywords = "Oceans > Ocean Topography > Sea Surface Height" ;:keywords_vocabulary = "NetCDF COARDS Climate and Forecast Standard Names" ;:license = "http://marine.copernicus.eu/web/27-service-commitments-and-licence.php" ;:platform = "Altika Haiyang-2A Cryosat-2 OSTM/Jason-2" ;:processing_level = "L4" ;:product_version = "15.4.1" ;:project = "COPERNICUS MARINE ENVIRONMENT MONITORING SERVICE (CMEMS)" ;:references = "http://marine.copernicus.eu" ;:source = "Altimetry measurements" ;:ssalto_duacs_comment = "OSTM/Jason-2 is the reference mission used for the altimeterinter-calibration processing" ;:standard_name_vocabulary = "NetCDF Climate and Forecast (CF) Metadata ConventionStandard Name Table v28" ;:summary = "Near-Real-Time Level-4 Sea Level Anomalies products from multi-satelliteobservations over Global Ocean." ;:time_coverage_duration = "P1D" ;:time_coverage_end = "2015-11-13 00:00:00Z" ;:time_coverage_resolution = "P1D" ;:time_coverage_start = "2015-11-13 00:00:00Z" ;:title = "NRT merged all satellites Global Ocean Gridded Sea Level Anomalies L4 product" ;
}
c© EU Copernicus Marine Service - Public Page 70

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
IX.4. Structure and semantic of NetCDF Gridded Noise on Sea LevelAnomaly files
The files are using the following structure and semantic:
• 3 dimensions are defined:
– lat: Latitude of measurements.
– lon: Longitude of measurements.
– nv: definition of bounds.
• 6 variables are defined:
– int noise : contains the noise at the grid point,
– float lon : contains the longitude for each measurement,
– float lat : contains the latitude for each measurement,
– float lon_bnds : contains the bounds in longitude ,
– float lat_bnds : contains the bounds in latitude ,
– int crs : useful for mapping,
• global attributes:
– the global attributes gives information about the creation of the file.
Example of a NetCDF noise sla file:
netcdf dt_global_al_sla_noise_vfec {dimensions:
lat = 89 ;lon = 180 ;nv = 2 ;
variables:float lat(lat) ;
lat:long_name = "Latitude" ;lat:standard_name = "latitude" ;lat:units = "degrees_north" ;lat:bounds = "lat_bnds" ;lat:axis = "Y" ;lat:valid_min = -90. ;lat:valid_max = 90. ;
float lat_bnds(lat, nv) ;float lon(lon) ;
lon:long_name = "Longitude" ;lon:standard_name = "longitude" ;lon:units = "degrees_east" ;lon:bounds = "lon_bnds" ;lon:axis = "X" ;lon:valid_min = 0. ;lon:valid_max = 360. ;
float lon_bnds(lon, nv) ;int crs ;
crs:grid_mapping_name = "latitude_longitude" ;crs:semi_major_axis = 6371000. ;crs:inverse_flattening = 0 ;
int noise(lat, lon) ;
c© EU Copernicus Marine Service - Public Page 71

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
noise:_FillValue = -2147483647 ;noise:long_name = "Sea Level Anomalies measurement noise" ;noise:standard_name = "sea_surface_height_above_sea_level" ;noise:units = "m" ;noise:scale_factor = 0.0001 ;
// global attributes::history = "2013-12-17 16:15:38:creation" ;:comment = "Surface product;" ;:institution = "CLS/CNES";:Conventions = "CF-1.6" ;:cdm_data_type = "Grid" ;:geospatial_lat_min = -90. ;:geospatial_lat_max = 88. ;:geospatial_lon_min = -1. ;:geospatial_lon_max = 359. ;:geospatial_vertical_min = "0.0" ;:geospatial_vertical_max = "0.0" ;:geospatial_lat_units = "degrees_north" ;:geospatial_lon_units = "degrees_east" ;:geospatial_lat_resolution = 2. ;:geospatial_lon_resolution = 2. ;:title = "SSALTO/Duacs Altimetric Level4 product: SARAL/AltiKa sea level anomaliesmeasurement noise on global area" ;:summary = "This dataset contains the measurement noise for filtered SARAL/AltiKa1-Hz measurements." ;:product_version = "5.0" ;:project = "CNES SSALTO/DUACS" ;:references = "http://www.aviso.altimetry.fr" ;:contact = "[email protected]" ;:license = "http://www.aviso.altimetry.fr/fileadmin/documents/data/License_Aviso.pdf" ;:date_created = "2013-12-17 16:15:38" ;:standard_name_vocabulary ="http://cf-pcmdi.llnl.gov/documents/cf-standard-names/standard-name-table/12/cf-standard-name-table.html" ;
}
c© EU Copernicus Marine Service - Public Page 72

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
IX.5. Structure and semantic of NetCDF Gridded Change reference files
The files are using the following structure and semantic:
• 3 dimensions are defined:
– lat: Latitude of measurements.
– lon: Longitude of measurements.
– nv: definition of bounds.
• 6 variables are defined:
– int ref20yto7y : contains the value at the grid point,
– float lon : contains the longitude for each measurement,
– float lat : contains the latitude for each measurement,
– float lon_bounds : contains the bounds in longitude ,
– float lat_bounds : contains the bounds in latitude ,
– int crs : useful for mapping,
• global attributes:
– the global attributes gives information about the creation of the file.
Example of a NetCDF ref20yto7y file:
netcdf med_ref20yto7y {dimensions:
lat = 129 ;lon = 345 ;nv = 2 ;
variables:float lat(lat) ;
lat:long_name = "Latitude" ;lat:standard_name = "latitude" ;lat:units = "degrees_north" ;lat:bounds = "lat_bnds" ;lat:axis = "Y" ;lat:valid_min = -90. ;lat:valid_max = 90. ;
float lat_bnds(lat, nv) ;float lon(lon) ;
lon:long_name = "Longitude" ;lon:standard_name = "longitude" ;lon:units = "degrees_east" ;lon:bounds = "lon_bnds" ;lon:axis = "X" ;lon:valid_min = 0. ;lon:valid_max = 360. ;
float lon_bnds(lon, nv) ;int crs ;
crs:grid_mapping_name = "latitude_longitude" ;crs:semi_major_axis = 6371000. ;
c© EU Copernicus Marine Service - Public Page 73

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
crs:inverse_flattening = 0 ;int ref20yto7y(lat, lon) ;
ref20yto7y:_FillValue = -2147483647 ;ref20yto7y:long_name = "Averaged Sea Level Anomaly 1993 to 1999" ;ref20yto7y:standard_name = "sea_surface_height_above_sea_level" ;ref20yto7y:units = "m" ;ref20yto7y:scale_factor = 0.0001 ;
// global attributes::cdm_data_type = "Grid" ;:geospatial_lat_min = 29.9375 ;:geospatial_lat_max = 46.0625 ;:geospatial_lon_min = 353.9375 ;:geospatial_lon_max = 397.0625 ;:geospatial_vertical_min = "0.0" ;:geospatial_vertical_max = "0.0" ;:geospatial_lat_units = "degrees_north" ;:geospatial_lon_units = "degrees_east" ;:geospatial_lat_resolution = 0.125 ;:geospatial_lon_resolution = 0.125 ;:title = "SSALTO/Duacs Altimetric Level4 product: sea level anomalies 20-year/7-yearreference change correction for Mediterranean Sea" ;:summary = "This dataset contains Delayed Time Level-4 monthly mean of sea surfaceheight above ellipsoid products from multi-satellite observations over Mediterranean Sea.It represents the correction for changing from the 20-year reference [1993,2012] to the7-year reference [1993,1999]. It must be substracted to the 20-year referenced SLA in orderto obtain a 7-y referenced SLA." ;:comment = "Test file; Surface product; Sea Level Anomalies referenced to the [1993, 2012] period" ;:product_version = "5.0" ;:institution = "CNES, CLS" ;:project = "SSALTO/DUACS" ;:references = "http://www.aviso.altimetry.fr" ;:contact = "[email protected]" ;:license = "http://www.aviso.altimetry.fr/fileadmin/documents/data/License_Aviso.pdf" ;:date_created = "2013-12-17 11:26:12" ;:history = "2013-12-17 11:26:12:creation" ;:Conventions = "CF-1.6" ;:standard_name_vocabulary ="http://cf-pcmdi.llnl.gov/documents/cf-standard-names/standard-name-table/12/cf-standard-name-table.html" ;
}
c© EU Copernicus Marine Service - Public Page 74

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
X. HOW TO DOWNLOAD A PRODUCT
X.1. Download a product through the CMEMS Web Portal Directgetfile Ser-vice
You first need to register. Please find below the registration steps:http://marine.copernicus.eu/web/56-user-registration-form.phpOnce registered, the CMEMS FAQhttp://marine.copernicus.eu/web/34-products-and-services-faq.php#2 will guide you onHow to download a product through the MyOcean Web Portal Directgetfile Service.
X.2. Download a product through the CMEMS Web Portal Ftp Service
You first need to register. Please find below the registration steps:http://marine.copernicus.eu/web/56-user-registration-form.phpOnce registered, the CMEMS FAQhttp://marine.copernicus.eu/web/34-products-and-services-faq.php#2 will guide you onHow to download a product through the CMEMS Web Portal FTP Service.
X.3. Download a product through the CMEMS Web Portal Subsetter Service
You first need to register. Please find below the registration steps:http://marine.copernicus.eu/web/56-user-registration-form.phpOnce registered, the CMEMS FAQhttp://marine.copernicus.eu/web/34-products-and-services-faq.php#2 will guide you onHow to download a product through the CMEMS Web Portal Subsetter Service.
c© EU Copernicus Marine Service - Public Page 75

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
XI. NEWS AND UPDATES
XI.1. [Duacs] Operational news
To be kept informed on events occurring on the satellites and on the eventual interruption of the services of the pro-cessing system, see the [Duacs] operational news on the Aviso website:http://www.aviso.oceanobs.com/en/data/operational-news/index.html.
XI.2. Updates
To have the information of the DUACS changes, improvements and updates of the system, please refer to:http://www.aviso.oceanobs.com/en/data/product-information/duacs/presentation/updates/index.html.
c© EU Copernicus Marine Service - Public Page 76

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
REFERENCES
[1] Amarouche L., P. Thibaut, O. Zanife, J.-P. Dumont, P. Vincent, and N. Steunou, "Improving the Jason-1 groundretracking to better account for attitude effects", Marine Geodesy, vol. 27, pp. 171-197, 2004.
[2] Andersen, O. B., The DTU10 Gravity filed and Mean sea surface (2010), Second international symposium of thegravity field of the Earth (IGFS2), Fairbanks, Alaska.
[3] Arbic B. K, R. B. Scott, D. B. Chelton, J. G. Richman and J. F. Shriver, 2012, Effects on stencil width onsurface ocean geostrophic velocity and vorticity estimation from gridded satellite altimeter data, J. Geophys.Res., vol117, C03029, doi:10.1029/2011JC007367.
[4] Boy, F. et al (2011): "Cryosat LRM, TRK and SAR processing". Presented at the 2011 Ocean Surface Topogra-phy Science Team meeting. http://www.aviso.altimetry.fr/fileadmin/documents/OSTST/2011/oral/01_Wednesday/Splinter%201%20IP/06%20%20Boy%20CPP%20Presentation.pdf
[5] Carrère, L, F. Lyard, M. Cancet, A. Guillot, L. Roblou, FES2012: A new global tidal model taking advantage ofnearly 20 years of altimetry, Proceedings of meeting "20 Years of Altimetry, Venice 2012.
[6] Carrere, L., F. Lyard, 2003, Modeling the barotropic response of the global ocean to atmospheric wind andpressure forcing- comparisons with observations. J. Geophys. Res., 30(6), 1275, doi:10.1029/2002GL016473.
[7] Carrere L., 2003, Etude et modélisation de la réponse HF de l’océan global aux forçages météorologiques. PhDthesis, Université Paul Sabatier (Toulouse III, France), 318 pp.
[8] Cartwright, D. E., R. J. Tayler, 1971, New computations of the tide-generating potential, Geophys. J. R. Astr.Soc., 23, 45-74.
[9] Cartwright, D. E., A. C. Edden, 1973, Corrected tables of tidal harmonics, Geophys. J. R. Astr. Soc., 33, 253-264.
[10] Following the scientific recommendations from the OSTST meeting (San Diego, October 2011), the ESA CryosatProject and the CNES SALP Project have been collaborating to generate these Cryosat-derived L3 and L4 prod-ucts. Level 1B and Level 2 products derived from CNES processors are not distributed by AVISO as per theCNES / ESA agreement.
[11] Davis, R.E. 1998, Preliminary results from directly measuring middepth circulation in the tropical and SouthPacific. Journal of Geophysical Research 103 (C11): PP. 24,619 24,639. doi:199810.1029/98JC01913.
[12] Dibarboure G., F. Boy, J.D.Desjonqueres, S.Labroue, Y.Lasne, N.Picot, J.C.Poisson, P.Thibaut, In-vestigating short wavelength correlated errors on low-resolution mode altimetry, OSTST 2013,http://www.aviso.altimetry.fr/fileadmin/documents/OSTST/2013/oral/THIBAUT_SmallScales_OSTST_Boulder.pdf
[13] Dibarboure G., C. Renaudie, M.-I. Pujol, S. Labroue, N. Picot, 2011, "A demonstration of the potential ofCryosat-2 to contribute to mesoscale observation", J. Adv. Space Res., doi:10.1016/j.asr.2011.07.002. http://dx.doi.org/10.1016/j.asr.2011.07.002
[14] Dibarboure G., P. Schaeffer, P. Escudier, M-I.Pujol, J.F. Legeais, Y. Faugère, R. Morrow, J.K. Willis, J. Lambin,J.P. Berthias, N. Picot, 2010: Finding desirable orbit options for the "Extension of Life" phase of Jason-1.Submitted to Marine Geodesy.
[15] Dibarboure G., M-I.Pujol, F.Briol, PY.Le Traon, G.Larnicol, N.Picot, F.Mertz, M.Ablain, 2011: Jason-2 inDUACS: first tandem results and impact on processing and products. Marine Geodesy, 34,(3-4),214-241.
[16] Dibarboure G., 2009: Using short scale content of OGDR data improve the Near Real Time products ofSsalto/Duacs, oral presentation at Seattle OSTST meeting (pdf).
[17] Dorandeu, J., M. Ablain, Y. Faugère, F. Mertz, B. Soussi, and P. Vincent, 2004: Jason-1 global statistical evalua-tion and performance assessment. Calibration and cross-calibration results. Marine Geodesy, 27,(3-4), 345-372
[18] Dorandeu, J., M. Ablain, P.-Y. Le Traon, 2003: Reducing Cross-Track Geoid Gradient Errors aroundTOPEX/Poseidon and Jason-1 Nominal Tracks: Application to Calculation of Sea Level Anomalies. J. of At-mosph. and Ocean. Techn.,20, 1826-1838.
c© EU Copernicus Marine Service - Public Page 77

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
[19] Dorandeu, J. and P.-Y. Le Traon, 1999: Effects of global mean atmospheric pressure variations on mean sea levelchanges from TOPEX/Poseidon. J. Atmos. Oceanic Technol., 16, 1279-1283.
[20] Ducet, N., P.-Y. Le Traon, and G. Reverdin, 2000: Global high resolution mapping of ocean circulation fromTOPEX/Poseidon and ERS-1 and -2. J. Geophys. Res., 105, 19477-19498.
[21] Dufau C., S. Labroue, G. Dibarboure, Y. Faugère, I. Pujol, C. Renaudie, N. Picot, 2013, Reducing altimetrysmall-scale errors to access (sub)mesoscale dynamics, OSTST 2013 http://www.aviso.altimetry.fr/fileadmin/documents/OSTST/2013/oral/Dufau_PresentationError_FINAL.pdf
[22] Egbert, Gary D., Svetlana Y. Erofeeva, 2002: Efficient Inverse Modeling of Barotropic Ocean Tides. J. Atmos.Oceanic Technol., 19, 183-204. doi: 10.1175/1520-0426(2002)019<0183:EIMOBO>2.0.CO;2
[23] Escudier, R., J. Bouffard, A. Pascual, P.M. Poulain, and M.I. Pujol, 2013.Improvement of Coastal and MesoscaleObservation from Space: Application to the Northwestern Mediterranean Sea. Geophysical Research Letters 40(10): 21482153. doi:10.1002/grl.50324.
[24] Gaspar, P., and F. Ogor, Estimation and analysis of the Sea State Bias of the ERS-1 altimeter. Report of taskB1-B2 of IFREMER Contract n˚ 94/2.426 016/C., 1994.
[25] Gaspar, P., F. Ogor and C. Escoubes, 1996, Nouvelles calibration et analyse du biais d’état de mer des altimètresTOPEX et POSEIDON. Technical note 96/018 of CNES Contract 95/1523, 1996.
[26] Gaspar, P., and F. Ogor, Estimation and analysis of the Sea State Bias of the new ERS-1 and ERS-2 altimetricdata (OPR version 6). Report of task 2 of IFREMER Contract n˚ 96/2.246 002/C, 1996.
[27] Gaspar, P., S. Labroue and F. Ogor. 2002, Improving nonparametric estimates of the sea state bias in radaraltimeter measurements of seal level, J. Atmos. Oceanic Technology, 19, 1690-1707.
[28] Hernandez, F., P.-Y. Le Traon, and R. Morrow, 1995: Mapping mesoscale variability of the Azores Current usingTOPEX/POSEIDON and ERS-1 altimetry, together with hydrographic and Lagrangian measurements. Journalof Geophysical Research, 100, 24995-25006.
[29] Hernandez, F. and P. Schaeffer, 2000: Altimetric Mean Sea Surfaces and Gravity Anomaly maps inter-comparisons AVI-NT-011-5242-CLS, 48 pp. CLS Ramonville St Agne.
[30] Hernandez, F., M.-H. Calvez, J. Dorandeu, Y. Faugère, F. Mertz, and P. Schaeffer, 2000: Surface MoyenneOcéanique: Support scientifique à la mission altimétrique Jason-1, et à une mission micro-satellite altimétrique.Contrat SSALTO 2945 - Lot 2 - A.1. Rapport d’avancement. CLS/DOS/NT/00.313, 40 pp. CLS Ramonville StAgne.
[31] Iijima, B.A., I.L. Harris, C.M. Ho, U.J. Lindqwiste, A.J. Mannucci, X. Pi, M.J. Reyes, L.C. Sparks, B.D. Wilson,1999: Automated daily process for global ionospheric total electron content maps and satellite ocean altimeterionospheric calibration based on Global Positioning System data, J. Atmos. Solar-Terrestrial Physics, 61, 16,1205-1218
[32] Labroue S., A. Ollivier, M. Guibbaud, F. Boy, N. Picot, P. Féménias, "Quality assessment of Cryosat-2 alti-metric system over ocean", 2012, OSTST in Venice, available at http://www.aviso.altimetry.fr/fileadmin/documents/OSTST/2012/posters/Labroue_Ollivier_Guibbaud_Final.pdf
[33] Labroue S., F. Boy, N. Picot, M. Urvoy, M. Ablain, "First quality assessment of the Cryosat-2 altimetric systemover ocean", J. Adv. Space Res., 2011, doi:10.1016/j.asr.2011.11.018. http://dx.doi.org/10.1016/j.asr.2011.11.018
[34] Labroue, S., 2007: RA2 ocean and MWR measurement long term monitoring, 2007 report for WP3, Task 2 -SSB estimation for RA2 altimeter. Contract 17293/03/I-OL. CLS-DOS-NT-07-198, 53pp. CLS Ramonville St.Agne
[35] Labroue, S., P. Gaspar, J. Dorandeu, O.Z. Zanifé, F. Mertz, P. Vincent, and D. Choquet, 2004: Non parametricestimates of the sea state bias for Jason-1 radar altimeter. Marine Geodesy, 27, 453-481.
[36] Lagerloef, G.S.E., G.Mitchum, R.Lukas and P.Niiler, 1999: Tropical Pacific near-surface currents estimated fromaltimeter, wind and drifter data, J. Geophys. Res., 104, 23,313-23,326.
c© EU Copernicus Marine Service - Public Page 78

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
[37] Le Traon, P.-Y. and F. Hernandez, 1992: Mapping the oceanic mesoscale circulation: validation of satellitealtimetry using surface drifters. J. Atmos. Oceanic Technol., 9, 687-698.
[38] Le Traon, P.-Y., P. Gaspar, F. Bouyssel, and H. Makhmara, 1995: Using Topex/Poseidon data to enhance ERS-1data. J. Atmos. Oceanic Technol., 12, 161-170.
[39] Le Traon, P.-Y., F. Nadal, and N. Ducet, 1998: An improved mapping method of multisatellite altimeter data. J.Atmos. Oceanic Technol., 15, 522-534.
[40] Le Traon, P.-Y. and F. Ogor, 1998: ERS-1/2 orbit improvement using TOPEX/POSEIDON: the 2 cm challenge.J. Geophys. Res., 103, 8045-8057.
[41] Le Traon, P.-Y. and G. Dibarboure, 1999: Mesoscale mapping capabilities of multi-satellite altimeter missions.J. Atmos. Oceanic Technol., 16, 1208-1223.
[42] Le Traon, P.-Y., G. Dibarboure, and N. Ducet, 2001: Use of a High-Resolution Model to Analyze the MappingCapabilities of Multiple-Altimeter Missions. J. Atmos. Oceanic Technol., 18, 1277-1288.
[43] Le Traon, P.Y. and G. Dibarboure, 2002 Velocity mapping capabilities of present and future altimeter missions:the role of high frequency signals. J. Atmos. Oceanic Technol., 19, 2077-2088.
[44] Le Traon, P.Y., Faugère Y., Hernandez F., Dorandeu J., Mertz F. and M. Ablain, 2002: Can we merge GEOSATFollow-On with TOPEX/POSEIDON and ERS-2 for an improved description of the ocean circulation, J. Atmos.Oceanic Technol., 20, 889-895.
[45] Le Traon, P.Y. and G. Dibarboure, 2004: An Illustration of the Contribution of the TOPEX/Poseidon-Jason-1Tandem Mission to Mesoscale Variability Studies. Marine Geodesy, 27 (1-2).
[46] Maheu C. M.-I. Pujol, Y. Faugère, 2013, Change of the SSALTO/Duacs reference period, Aviso+ Newsletter#9http://www.aviso.altimetry.fr/fileadmin/documents/newsstand/Newsletter/aviso_users_news09.pdf
[47] Mertz F., F. Mercier, S. Labroue, N. Tran, J. Dorandeu, 2005: ERS-2 OPR data quality assessment ; Long-termmonitoring - particular investigation. CLS.DOS.NT-06.001 (pdf)
[48] MSS_CNES_CLS11 was produced by CLS Space Oceanography Division and distributed by Aviso, with supportfrom Cnes (http://www.aviso.altimetry.fr/)".
[49] Pascual, A., Y. Faugère, G. Larnicol, P-Y Le Traon, 2006: Improved description of the ocean mesoscale vari-ability by combining four satellite altimeters. Geophys. Res. Lett., 33
[50] Pascual A., C. Boone, G. Larnicol and P-Y. Le Traon, 2009. On the quality of Real-Time altimeter gridded fields:comparison with in-situ data. Journ. of Atm. and Ocean. Techn. Vol. 26(3) pp. 556-569, DOI: 10.1175/2008JTE-CHO556.1
[51] Picot, N., J.M. Lachiver, J. Lambin, J.C. Poisson, J.F. Legeais, A. Vernier, P. Thibaut, M. Lin, Y. Jia, To-wards an operational use of HY-2A in SSALTO/Duacs: evaluation of the altimeter performances unsingNSOAS S-IGDR data, OSTST 2013 in Boulder, http://www.aviso.altimetry.fr/fileadmin/documents/OSTST/2013/oral/Picot_OSTST_HY2_inside_Duacs.pdf
[52] Prandi P., M. Ablain, A. Cazenave, N. Picot, 2011, A new estimation of mean sea level in the Arctic Ocean fromsatellite altimetry. Submitted to Marine Geodesy.
[53] Pujol M-I. et al., 2009. Three-satellite quality level restored in NRT, poster at OSTST meeting (pdf)
[54] Pujol M.-I., Y. Faugère, J.-F. Legeais, M.-H. Rio, P Schaeffer, E. Bronner, N. Picot, 2013, A 20-year reference pe-riod for SSALTO/DUACS products, OSTST, 2013 http://www.aviso.altimetry.fr/fileadmin/documents/OSTST/2013/oral/pujol_ChgtRef.pdf
[55] Ray, R., 1999: A Global Ocean Tide model from TOPEX/Poseidon Altimetry, GOT99.2. NASA Tech. Memo.NASA/TM-1999-209478, 58 pp. Goddard Space Flight Center, NASA Greenbelt, MD, USA.
[56] Rio, M.-H. and F. Hernandez, 2003: A Mean Dynamic Topography computed over the world ocean from altime-try, in-situ measurements and a geoid model. J. Geophys. Res., 109, C12032, doi:10.1029/2003JC002226.
c© EU Copernicus Marine Service - Public Page 79

PUM for products Ref: CMEMS-SL-PUM-008-017-036
SEALEVEL_*_SLA_*_OBSERVATIONS_008_0* Date : 24th November 2015
Issue : 1.10
[57] Rio, M.-H. and F. Hernandez, 2003: High frequency response of wind-driven currents measured by driftingbuoys and altimetry over the world ocean. J. Geophys. Res., 108, 39-1.
[58] Rio, M.-H., 2003: Combinaison de données in situ, altimétriques et gravimétriques pour l’estimation d’unetopographie dynamique moyenne globale. Ed. CLS. PhD Thesis, University Paul Sabatier (Toulouse III, France),260pp.
[59] Rio, M.-H., S. Mulet, E. Greiner, N. Picot, A. Pascual, 2013:" New global Mean Dynamic Topogra-phy from a GOCE geoid model, altimeter measurements and oceanographic in-situ data", OSTST2013,http://www.aviso.altimetry.fr/fileadmin/documents/OSTST/2013/oral/mulet_MDT_CNES_CLS13.pdf
[60] , Rio, M.-H., Pascual, A., Poulain, P.-M., Menna, M., Barceló, B., and Tintoré, J. (2014): Computation of anew Mean Dynamic Topography for the Mediterranean Sea from model outputs, altimeter measurements andoceanographic in-situ data, Ocean Sci. Discuss., 11, 655-692, doi:10.5194/osd-11-655-2014, 2014.
[61] Rudenko, S., M. Otten, P. Visser, R. Scharroo, T. Schöne and S. Esselborn: New improved orbit solutions for theERS-1 and ERS-2 satellites, April 2012, Advances in Space Research, 49, issue 8,urlhttp://www.sciencedirect.com/science/article/pii/S0273117712000786
[62] Scharroo, R., J. Lillibridge, and W.H.F. Smith, 2004: Cross-calibration and long-term monitoring of the Mi-crowave Radiometers of ERS, Topex, GFO, Jason-1 and Envisat. Marine Geodesy, 97.
[63] Scharroo, R., and J. L. Lillibridge, Non-parametric sea-state bias models and their relevance to sea level changestudies, in Proceedings of the 2004 Envisat & ERS Symposium, Eur. Space Agency Spec. Publ., ESA SP-572,edited by H. Lacoste and L. Ouwehand, 2005.
[64] Scharroo, R. and W.H.F. Smith: A global positioning system-based climatology for the total electron content inthe ionosphere. J. Geophys. Res., 115, issue A10. DOI: 10.1029/2009JA014719urlhttp://onlinelibrary.wiley.com/doi/10.1029/2009JA014719/abstract
[65] Tran N., S. Philipps, J.-C. Poisson, S. Urien, E. Bronner, N. Picot, "Impact of GDR_D standards on SSBcorrections", Presentation OSTST2012 in Venice, http://www.aviso.altimetry.fr/fileadmin/documents/OSTST/2012/oral/02_friday_28/01_instr_processing_I/01_IP1_Tran.pdf
[66] Tran N. and E. Obligis, December 2003, "Validation of the use of ENVISAT neural algorithms on ERS-2",CLS.DOS/NT/03.901.
[67] Tran, N., S. Labroue, S. Philipps, E. Bronner, and N. Picot, 2010 : Overview and Update of the Sea State BiasCorrections for the Jason-2, Jason-1 and TOPEX Missions. Marine Geodesy, accepted.
[68] Vincent, P., Desai S.D.,Dorandeu J., Ablain M., Soussi B., Callahan P.S. and B.J. Haines, 2003: Jason-1 Geo-physical Performance Evaluation. Marine Geodesy, 26, 167-186.
[69] Wahr, J. W., 1985, Deformation of the Earth induced by polar motion,J. of Geophys. Res. (Solid Earth), 90,9363-9368.
c© EU Copernicus Marine Service - Public Page 80












![IT CAME UPON A MIDNIGHT CLEAR - Bytown · Web viewLittle Drummer Boy [D] Come they told me, Pa [A7] rup a pum [D] pum [D] A new born king to see. Pa [A7] rup a pum [D] pum [A] Our](https://img.pdfslide.us/doc/110x75/5a7098a47f8b9aa2538c3b0a/docit-came-upon-a-midnight-clear-bytown-ukulelewwwbytownukulelecaportalsukuleleclubsongsweb.jpg)