Embed Size (px)
Citation preview

Multidisciplinary Senior Design ConferenceKate Gleason College of Engineering
Rochester Institute of TechnologyRochester, New York 14623
Project Number: P18227
COMQUAT: COMPRESSIBLE QUADRUPEDAL TECHNOLOGY
(SOFT WALKING ROBOT V2.0)
Conor McKaigBiomedical Engineering
Zachary DiLegoBiomedical Engineering
Cameron TaylorElectrical Engineering
Zachary HayesMechanical Engineering
Sean BayleyElectrical Engineering
Marie McCartanBiomedical Engineering
Jamie MortensenBiomedical Engineering
Copyright © 2018 Rochester Institute of Technology

Proceedings of the Multidisciplinary Senior Design Conference Page 2
ABSTRACTThe objective of this project was to produce a working prototype of a soft, deployable, expandable air- or water-
propelled walking robot. This technology could then be used as a future platform for robots with various applications, including recreational, search-and-rescue, or bomb-disposal robots. The robot would start attached to an RC vehicle and be capable of walking at least 10 feet in a straight line away from the vehicle before returning to and remounting the vehicle. The robot would inflate or expand to double its initial size and be fluidically powered using previously developed soft inflatable robotic capabilities. The final prototype utilizes silicon-casted legs that are inflated and mobilized by micro-compressed air.
INTRODUCTION Soft Robotics is a cutting-edge area of research in the robotics field, requiring materials and processes not
typically included in “hard” robotics. Soft robots can tolerate deformation and perturbation better than traditional robots and have some unique applications. End uses for the ComQuaT-type system could include search-and-rescue missions, traversal of rough terrain, firefighting, rubble-clearing, and more.
The ComQuaT system is an early stage prototype of a field-service ready, soft, walking robotics system. The primary goals for this project are to design and build a soft, walking robotics system capable of deploying from an RC vehicle, traversing flat ground in a straight line, and returning to the RC. This project falls under Research and Development Engineering and is an early stage prototype. As a result the project has relatively few customer and engineering requirements.
PROCESS Customer RequirementsThe system is required to be safe, functional, deployable, and durable. Safety includes that of both operators and
bystanders as well as any personal property with which the robot may come into contact. Functionality is defined as the capability to walk a significant distance from the vehicle in a straight line and return. Deployability includes the capabilities of unmounting and remounting the RC vehicle as well as inflating and deflating properly. Durability includes being able to run for a significant amount of time on reasonable battery resources and the ability to resist reasonably expected damage or environmental conditions such as wind.
Engineering RequirementsFor safety purposes, the electrical and pneumatic systems have to be properly operated and safeguarded so that
they neither catch fire nor explode. The exposed areas of the robot and RC and the maximum velocity of each also have to be moderated so that the system does not pose a danger to operators or bystanders. To be considered fully functioning, the robot must be able to travel at least 10 feet from the RC and must deviate no more than 2 inches to either side of its intended straight path. The robot must be able to meet these specifications in up to 25 mile/hour winds. To deploy successfully, the robot must fully separate from the RC chassis with the exception of a single umbilical cord and then be able to rejoin the RC chassis after its expedition. Both the RC and robot must be fully operable by a single video-game controller from a distance of at least 10 feet away. The deflated robot must occupy 50-70% of the total volume of the inflated robot and be able to accomplish this inflation or deflation in at most 30 seconds. In terms of durability, the robot must be able to function continuously for ten hours without sustaining damage or necessitating repairs. Batteries may be replaced, but a single battery must be sufficient for multiple expeditions. A chart outlining the engineering requirements can be found in Appendix I.
Risk ManagementSeveral risks pertaining to this project were identified. Each risk was categorized as Technical, Safety,
Resource, or Environmental/Societal and given an ID. For each risk, the likely cause and effect were described and potential mitigation methods listed. The severity and likelihood of each risk was rated on a scale from 1 to 10 and these two values were multiplied to produce an overall metric of priority for addressing each risk. This priority value was used to categorize the risks as high-level (priority value of above 30), mid-level (priority value between 15 and 30), or low-level (priority value of 15 or less). The Risk Management table is displayed in Appendix II.
Bill of MaterialsIn order to budget the project, a detailed Bill of Materials (BOM) was created. For each part, the BOM recorded
the subsystem in which the part is used, the part number (for internal project use), the specific name of the part, the quantity needed, the unit cost, the quantity per unit, the total part cost, additional part descriptions, the vendor, and a URL linking to the part on the vendor’s website. Once the design was finalized, the required, ordered, received, and
Project P18227

location status of each part was also recorded and updated as necessary. Original data sheets and notes were also linked and recorded. A color-coding system was also used to differentiate between items already ordered (green), items remaining to be ordered (yellow), and items deemed no longer necessary (red).
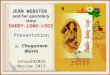
Evaluation of Inflatability MethodsTo evaluate the silicone leg chambers’ ability to inflate, a complete leg was connected to a test assembly. The
test assembly was composed of a pressure gauge, pressure regulator, and compressed air supply. Expected values for standing pressure and articulation pressure based on Drotman et al. [1] were 5 psi and 10 psi, respectively. It was shown in testing that these pressures were sufficient to produce significant articulation of the leg.
Figure 1. Testing of silicone leg at standing pressure (left) and articulation pressure (right).
Evaluation of Deployment MethodsA variety of deployment methods were evaluated using the selection criteria of power use, cost, imprecision,
and risk of breakage. The deployment problem was further broken down into “latching”, the method by which the robot is affixed to the RC unit, and “abduction”, the method by which the robot returns to its dock within the RC unit. The latch methods evaluated were simple magnets, electromagnets, nesting components, velcro, clasp, and clips. The abduction methods evaluated were crane, vacuum, tether, and ramp. A Pugh analysis was used to assess these methods using criteria of power use, cost, imprecision, and risk of breakage. A system where the robot is abducted by retracting its tether and latched using a nesting component structure was deemed the most advantageous.
RESULTS AND DISCUSSIONBuilding the System
RC VehicleThe remote control vehicle platform was based on a differential drive system. Differential drive allows for
rotation on the vehicle’s center axis which provides more accurate angling and positioning for robot deployment than Ackerman steering. Due to budget restrictions, only two motors were available for powering the RC platform. These two motors were placed in the back of the platform with a wheel castor in the front. The body of the vehicle was constructed using wooden beams for the frame and a metal grate for the base of the platform. An Arduino Uno was used for steering the RC vehicle. The Arduino was connected with a USB host shield and a motor driver shield. The USB host shield allowed for communication with an XBox 360 controller. The motor driver connected to the driving motors and was powered with 12V. The Arduino code was used to check for input from the XBox controller and check which direction and speed the user was giving for input. The Arduino then appropriately scaled the pulse width modulation (PWM) signal and control signals to the motor driver to control the speed and direction of the motors.
Spool DesignThe spool for retracting and extending the umbilical line of the robot was designed to fit on the RC vehicle
and be controlled by the user. The spool contains the pneumatic manifolds and valve control system for the robot. The spool was made from carpet tubing with a wooden center. Two halves of the carpet tubing were connected to the wooden center with hinges to allow for easy opening and closing of the spool body. Two metal tubes were screwed into the side of the wooden frame which were supported by the frame. The metal tubes rested in two housings with bearings to allow the spool to spin. The spool was controlled using a NEMA 276 oz-in stepper motor attached to the bottom of the RC frame. The stepper motor was connected to the spool using a gear system with a bicycle chain. Initially, a smaller gear was connected to the wooden frame on the side of the spool and was turned with the stepper motor and chain. However, when the spool was tested with the pneumatic manifold system inside, there was not enough torque provided by the stepper to completely turn the spool and pull in the tether. This was

Proceedings of the Multidisciplinary Senior Design Conference Page 4
corrected by laser cutting a larger gear to connect to the side of the spool and increase the torque ratio between the stepper and the spool. The larger gear was designed to use a longer chain of the same width and pitch.
Pneumatics DesignThe pneumatics system was created to provide variable air pressure with accurate and fast-acting changes
in air flow. The robot was designed with four legs, each comprised of three muscles, and the ability to actuate each muscle individually, requiring a minimum of 12 separate air lines. These air lines must be able to inflate the robot’s muscles to a given pressure and maintain that pressure, increase pressure selectively to extend a muscle, and finally relax that muscle back to the standing pressure. Based on the resources and requirements a system was designed comprising of 24 total three-way air valves fed by two low-power air pumps feeding a single line which distributes air to two pressure regulators before the valves. The valves are split into two equal banks of 12 valves each. The first bank distributes either standing pressure or actuation pressure to the pneumatic lines. The second bank can either pass this pressure through to the robot or vent individual lines to the atmosphere to release the actuation pressure and allow the muscles to return to a standing pressure. These two banks then feed into a 10-foot, 12-line umbilical cord which is fed out to the robot. Differences in performance between the cast muscles can be corrected by adjusting the opening and closing times of individual three-way valves and exposing muscles to the respective pressures for more or less time, as required. A fluid diagram of the pneumatics system is depicted in Fig. 2.
Figure 2. Fluid diagram of the pneumatics system.
Leg FabricationFabricating the robot’s legs was the largest obstacle to building the ComQuaT system. The legs are made
up of four main components; three articulation chambers and one toe pad. Initially the team had decided to pursue 3D printing the legs, using designs modified from Drotman et al. [1] (3D Printed Soft Actuators for a Legged Robot Capable of Navigating Unstructured Terrain). This project was done in the Mechanical Engineering department at University of California at San Diego, and focused only on the fabrication of the legs which involved materials and machines not available to the ComQuaT team. The team chose NinjaFlex filament from NinjaTek to 3D print the articulation chambers based on the results NinjaTek published [2] of ASTM D-638 [3] testing. The NinjaFlex has similar characteristics to the custom material described by Drotman et al. [1]. Tensile strength was a key concern for the team during this project because this property provided an upper boundary condition for the range of internal pressures the system could apply to the articulation chambers.
The ComQuaT team was unable to replicate the rounded geometry used at UC-SD so a modified hexagonal model was made to mitigate problems in the printing process. The hexagonal model could be printed reliably with dissolvable internal supports made out of Poly-vinyl Alcohol (PVA). However, these chambers did not remain airtight after dissolving out the internal supports. At multiple points in the walls of the chambers the PVA filament was laid instead of the NinjaFlex which left gaps in the walls prone to propagation. Concluding that 3D printing would not be a viable method to fabricate the articulation chambers, the team transitioned to casting the chambers completely out of DragonSkin (Shore 20A [4], ASTM D-2240 [5]), which had been investigated as a back-up plan in the early stages of design and development. As a result of the team’s inability to produce a working 3D printed articulation chamber no tensile testing was performed on either the chambers or the leg assemblies.
In order to fabricate alternate legs using cast silicone, 3D printed molds were created. The liquid DragonSkin silicone was mixed and placed in a vacuum chamber to remove air bubbles prior to casting. This step
Project P18227

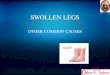
ensured greater consistency in the molded products, limiting air pockets that would yield inconsistencies. The DragonSkin was then gently poured into molds and inserts placed to retain cavities. Leg chamber molds were cast in separate halves, then cast together. The original casts were successful in producing airtight chambers, but preliminary testing showed less linear expansion than desired. The chamber design was reworked to include more dramatic folds further increasing the linear expansion and contraction capacity of each chamber. The footpads of each leg were cast in one step with a similar clamshell mold. Once cast, three leg chambers were cast directly into the footpad to ensure a secure and airtight seal. The open ends of the leg chambers are then secured at the chassis and connected to air supply lines. The casting process is depicted in Fig. 3.
Figure 3. Half-leg mold with silicone (top) and half-leg removed from mold (bottom).
Circuit DesignThe circuit design went through several iterations, but the core of the design focused around an opto-
isolator that was triggered on the input by the Arduino’s digital output. The final configuration resulted in a BJT on the input controlled by the Arduino. The BJT, when activated, would connect 5V to the input of the optoisolator and supply 50mA to the input. The output of the optoisolator was connected as a switch between the 30V to the valves. This configuration is shown in Fig. 4.
Figure 4. Valve Isolator Control CircuitThe compressor control circuit was very similar. The only addition to the compressor control circuit was
the addition of a high current BJT to the output of the optoisolator in a Darlington configuration to supply the necessary current to the compressors. This configuration is shown in Fig. 5:

Proceedings of the Multidisciplinary Senior Design Conference Page 6
Figure 5. Compressor Isolator Control Circuit
Power SourceThe ComQuaT system was initially designed to be powered entirely by two Tattu 14.8V 10,000 mAh 4S
LiPo batteries in series to achieve 30V, more than enough voltage to power the entire system and plenty of amperage to run multiple expeditions. However, early testing revealed issues with powering the Arduino and other components solely with this power source. This led to using a separate power source for the Arduinos, specifically the Anker Astro E3 5V 10,000 mAh battery, with the two Tattu batteries powering the rest of the system.
Testing PerformedPneumaticsConfirmation of expected behavior was established with the 3-way valves, delivered air pressure to the
legs, and air flow rate to the legs. 3-way valves were given power while their inlets and outlets were connected to the micro compressors and observed to accept air flow from two sources, and direct those flows to one outlet. However, due to time constraints during the build process a full suite of pneumatics testing was not completed.
Once silicone legs were cast and shown to hold air they were attached directly to the outlet of six 3-way valves with high and low pressures being supplied by the micro compressors. With a very short pneumatic line distance (small head loss) large articulation ranges were observed in one leg (three muscles) with fast response times. Connecting the assembled robot to the fully assembled pneumatics system and spooling lines also proved successful air flow distribution and control, but at much lower articulation ranges due to increases in head loss and various leaks throughout the pneumatic subsystem.
Reduced pressures experienced by the chambers resulted in an inability for the robot to stand during inflation testing. The robot was capable of standing passively, without air flow to the chambers, but when standing pressure was introduced to the chambers the robot’s chassis would rotate and descend closer to the ground until it was no longer standing. The legs were not all identical and so when standing pressure was introduced one or more of the legs curved and pushed the robot to rotate. The pattern of introducing articulation pressure to the legs had no effect on robot movement while supporting its own weight. When suspended above the ground the articulation pattern of the legs was consistent and functioned as expected.
CircuitThe valve isolator circuit was first tested by individually triggering each valve. This was done by
connecting 5V to each of the control pins on the isolator board and listening for the clicking of the valves. Afterwards, the Arduino Mega was connected to the valve control pins and cycled through code to power each pin while the pneumatics were connected to the valves. The legs were connected to the valve outputs and were observed to switch between standing pressure, articulation pressure, and atmosphere. The valves triggered and supplied the expected pressure levels to the legs. No faults in the circuit were found and each of the valves triggered as expected. The control circuit for the compressors were tested by setting the control pin to 5V and confirming that the compressors turned on and received 12V on the input. The measured voltage was confirmed to be 12V on the compressors when they were turned on.
Power SourceWhile powering the ComQuaT system, several issues were discovered. The first was that the Arduino
motor shield could not handle the amount of current received while operating the stepper motor, which forced the stepper motor to constantly reset during operation. This issue was resolved by adding in a stepper motor driver, specifically ST-M5045 Micro-Stepping Stepper Motor Driver, that limited the current going to the Arduino motor shield and enabled control and use of the stepper motor. The second issue dealt with using a single power source.
Project P18227

The power source was ultimately changed from a single source (two Tattu batteries in series) to two battery sources with the addition of the Anker battery powering the Arduinos. This resolved the Arduino reset issue due to voltage spikes from the Tattu batteries.
The battery system can handle more than one expedition, however, the system must have back-up batteries in order for the system to last the required 10 hours as dictated by the customer requirements. The battery system was found to last 5 hours before replacement batteries were needed.
Analysis of ResultsWhile our robot was not able to successfully walk, we believe the technological foundations for walking have
been created. A major roadblock to large articulation ranges with adequate pressure to move the robot was the leaking in the pneumatic manifold and distribution line connections. The engineering requirements mandated the system work continuously for long periods of time which limited power consumption. Low-power compressors chosen for our robot were not able to provide enough air flow rate to overcome small leaks. Greater scrutiny of the pneumatic assembly process to mitigate initial leaks could overcome this challenge, but more powerful compressors able to provide higher flow rates may be preferable. Unexpected leaks due to wear and tear or continued use are likely with the ComQuaT system, and the ability to operate successfully with some failures is preferable in any system. Higher flow compressor(s) would necessitate a reduction in required operation length.
CONCLUSIONS AND RECOMMENDATIONS The overall result was a system which was fully capable of navigation, inflation, deflation, spooling, and it was
all controlled remotely using an Xbox controller. The system was not able to accomplish a functional walking gait, but demonstrated the quadrupedal leg articulation pattern effectively when suspended above the walking surface. The ComQuaT team was proud of what they were able to accomplish during Multidisciplinary Senior Design, and look forward to the project being adopted by further teams of students.
Our primary recommendation to future teams with similar projects is to use cast silicone as the initial leg design rather than attempting to develop a flexible 3D printed model. Particularly with the resources available at RIT, our 3D printing endeavors proved too time-consuming, difficult to troubleshoot, and difficult to repair any ruptures to be a practical method of manufacturing for this project.
Electrical systems on the RC could be improved by creating a PCB for the valve isolator circuit and the compressor isolator circuit. This would reduce the number of wires and reduce the number of possible electrical connection faults.
Another recommendation would be to apply for grants or a budget increase as soon as possible. Even if you think you have enough in your budget, apply anyway. A larger budget never hurt. With that it is also recommended that extra parts are ordered, in case of damage to some or an error in the original order.
Recommendations for a follow-up project to ComQuaT include incorporating a grabber on the RC. An idea of how to go about this was to inflate the legs of the robot while it was attached to the RC, allowing the legs to additionally function as a grabber.
REFERENCES [1] Drotman D., Jadhav S., Karimi M., deZonia P., Tolley M. T., 2017, "3D Printed Soft Actuators for a Legged Robot Capable of Navigating Unstructured Terrain", Int. Conf. on Robotics and Automation (ICRA), Singapore.
[2] NinjaTek, 2016, “NinjaFlex 3D Printing Filament”, Manheim, PA.
[3] ASTM, 2014, “Designation: D638 - 14: Standard Test Method for Tensile Properties of Plastics, West Conshohocken, PA.
[4] Smooth-On, 2018, “Dragon Skin Series: Addition Cure Silicone Rubber Compounds”, Macungie, PA.
[5] ASTM, 2014, “Designation: D2240 - 15: Standard Test Method for Rubber Property—Durometer Hardness, West Conshohocken, PA.
ACKNOWLEDGMENTS The ComQuaT team would like to thank the Rochester Institute of Technology Multidisciplinary Design office
for their sponsorship of the project, as well as the Construct, AMPrint Center, and CIAS FabLab for allowing the team to use their 3D printers and resources. The team would also like to thank Russell Phelps and Dr. Kathleen Lamkin-Kennard for their support and guidance throughout the project. Additional support for the project also

Proceedings of the Multidisciplinary Senior Design Conference Page 8
provided by Michael Bufflin at the RIT Construct, Professor Mark Indovina of the EE Department, Anmol Modur, and Taylor Rakocy for graphic design.
APPENDICES Appendix I: Engineering RequirementsOutline of engineering requirements (ERs), corresponding customer requirements (CRs), and performance
results.
Appendix II: Additional DocumentsThe complete risk management document can be found and downloaded for viewing at
http://edge.rit.edu/edge/P18227/public/Build%20Test%20Prep/Risk%20Management.xlsx.The complete bill of materials document can be found and downloaded for viewing at
http://edge.rit.edu/edge/P18227/public/Project%20Management/Purchasing/BOM.xlsx.Additional documentation for the ComQuaT system and its design process can be found at
http://edge.rit.edu/edge/P18227/public/Home.
Project P18227