Embed Size (px)
Citation preview
Prelimenary Results from MASS & BeiDou first Continuous Operating
Reference System in Hubei Province
GNSS Research Center
Wuhan University
Outline
Introduction of PANDA software
MASS Using PANDA
COMPASS Precise Position Results
SUMMARY
Positioning And Navigation Data Analyst
To derive possible information from GNSS/SLR/VLBI/DORIS data
Real-time Processing function from 2007
Current Applications POD of GNSS (GPS, GLONASS, COMPASS,
GALILEO)
POD of LEOs (CHAMP, GRACE, COSMIC, JASION, HY-2A,ZY-3)
Ionosphere and Troposphere Modeling
Huge Network data processing
Real-time PPP, PPP-RTK
SINEX Combination
3
Outline
Introduction of PANDA software
MASS Using PANDA
COMPASS Precise Position Results
Summary

Prototype of Multi-Constellation Augmentation Service System(MASS) in China
Goals Using GNSS data stream in China and global
stations
Processing for Real-time GNSS orbit, Clock And atmosphere parameters
Products broadcast by sat. and Mobile internet
Augmentation with GPS/COMPASS in Wide-area, Dm level RT-PPP for double-frequency, Better than 1m accuracy for single-frequency
Support by National High-tech R&D Program (863 Program) of China
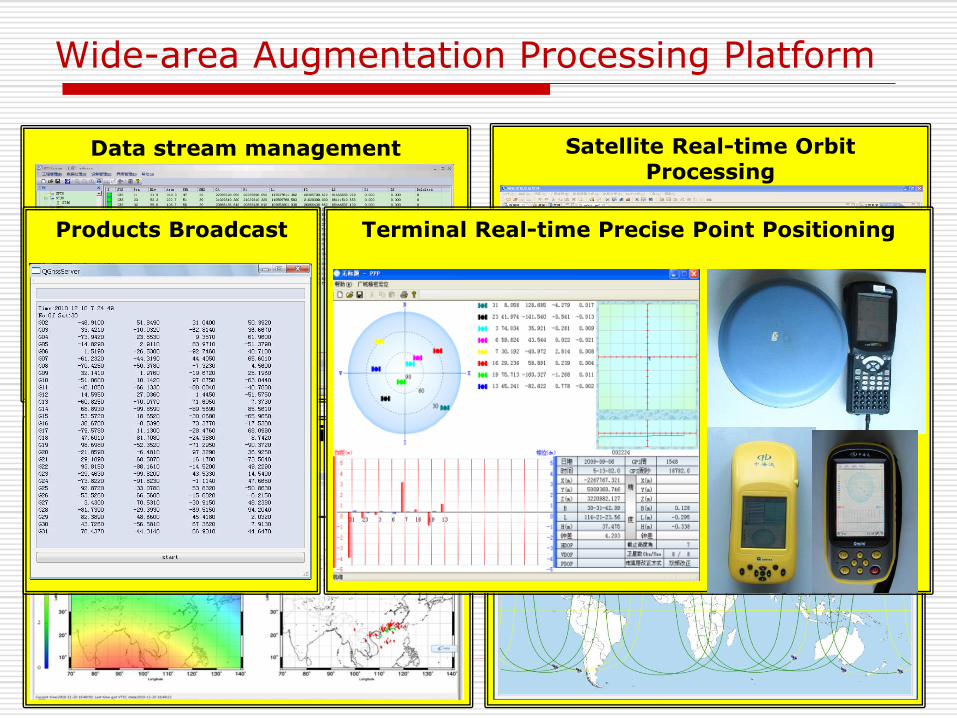
Data stream management
Wide-area Augmentation Processing Platform
6
Satellite Clock Real-time Estimation
Satellite Real-time Orbit Processing
Regional Ionospheric Delay Modeling
Terminal Real-time Precise Point Positioning Products Broadcast
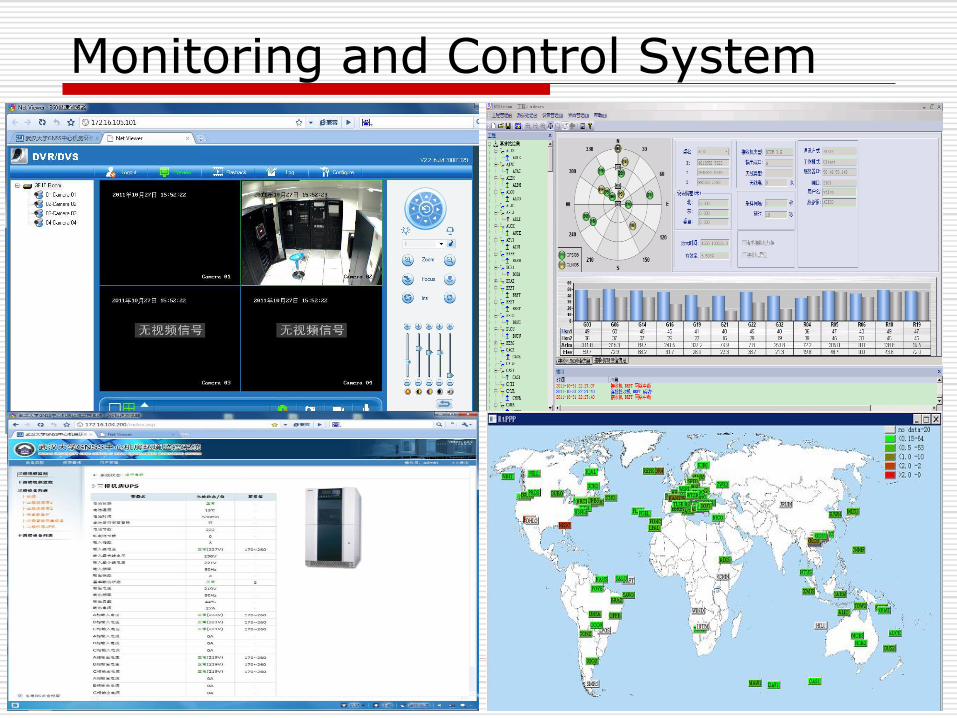
Monitoring and Control System
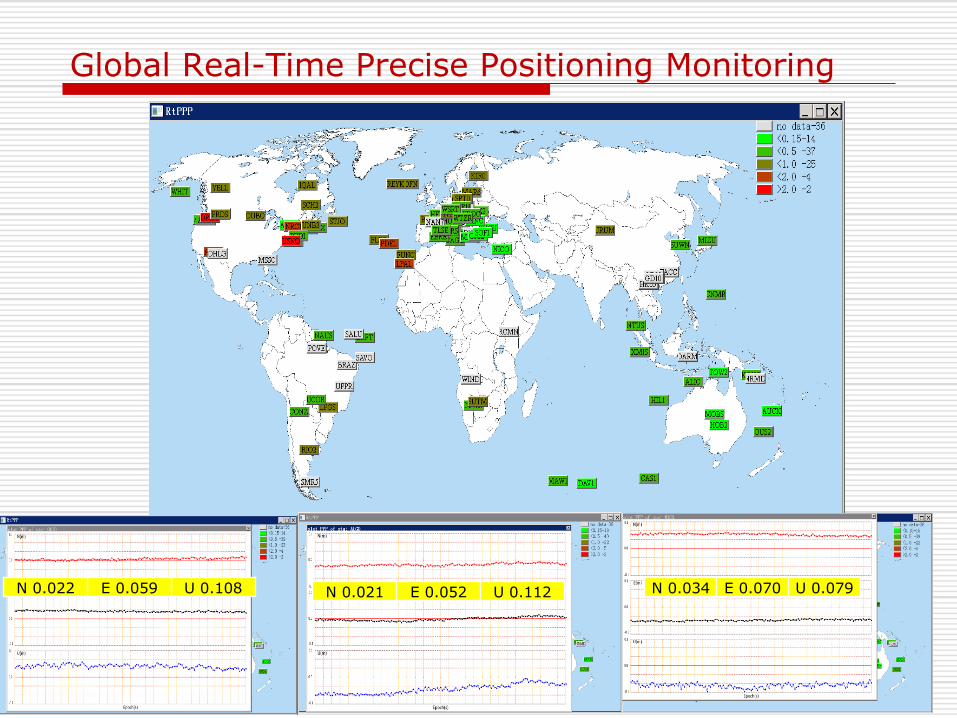
Global Real-Time Precise Positioning Monitoring
N 0.022 E 0.059 U 0.108 N 0.034 E 0.070 U 0.079 N 0.021 E 0.052 U 0.112

Ultra-rapid orbit Quality by PANDA
http://acc.igs.org/
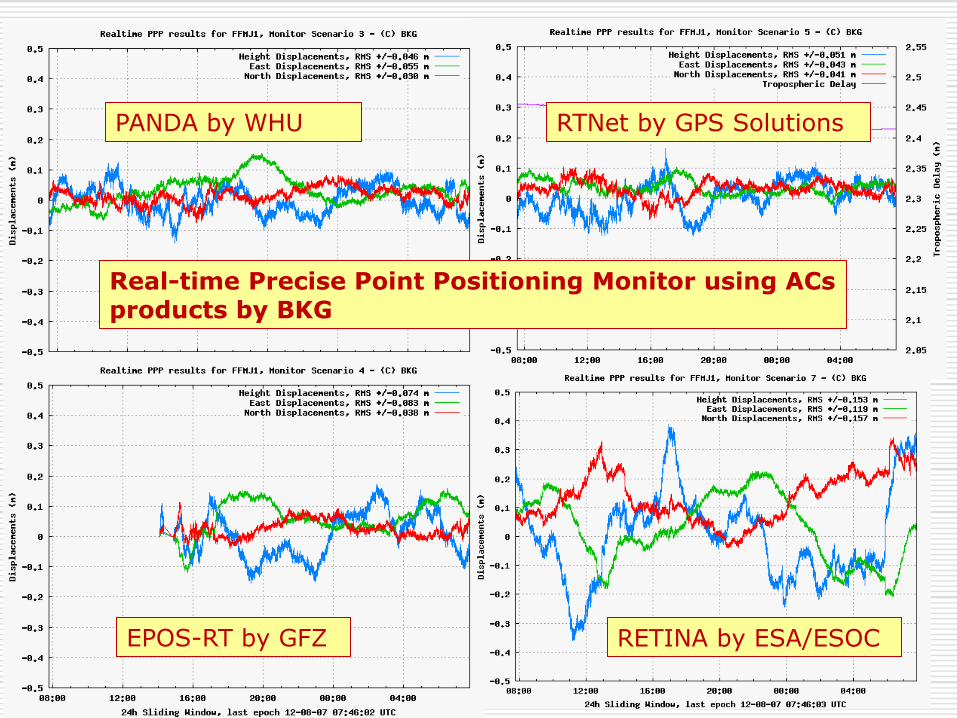
PANDA by WHU RTNet by GPS Solutions
RETINA by ESA/ESOC EPOS-RT by GFZ
Real-time Precise Point Positioning Monitor using ACs products by BKG
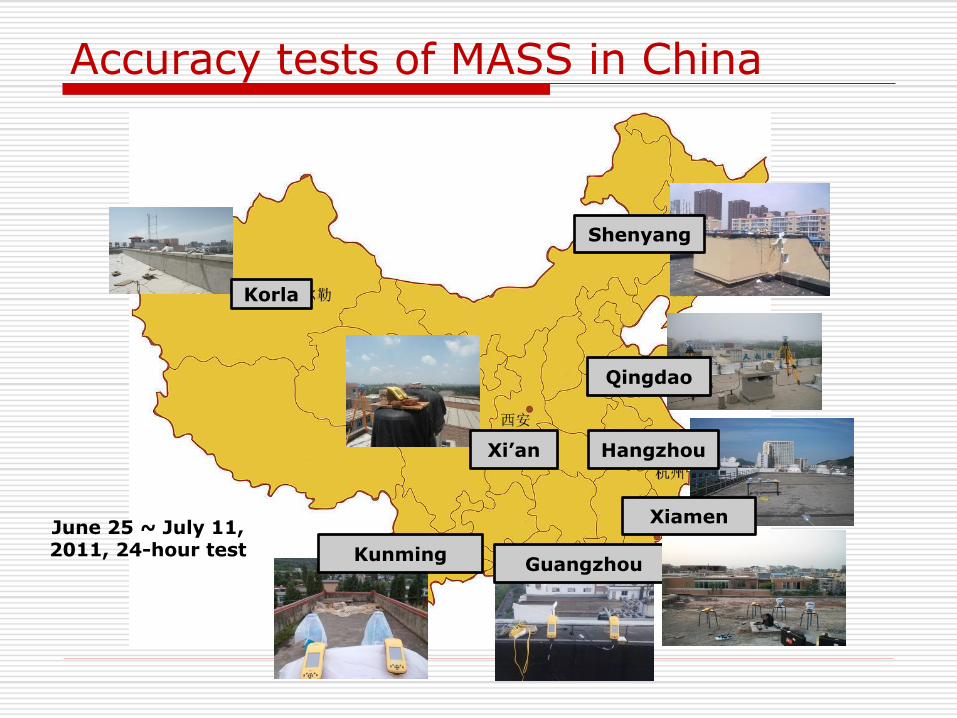
Accuracy tests of MASS in China
Kunming Guangzhou
Qingdao
Shenyang
Hangzhou
Xiamen
Xi’an
Korla
June 25 ~ July 11, 2011, 24-hour test
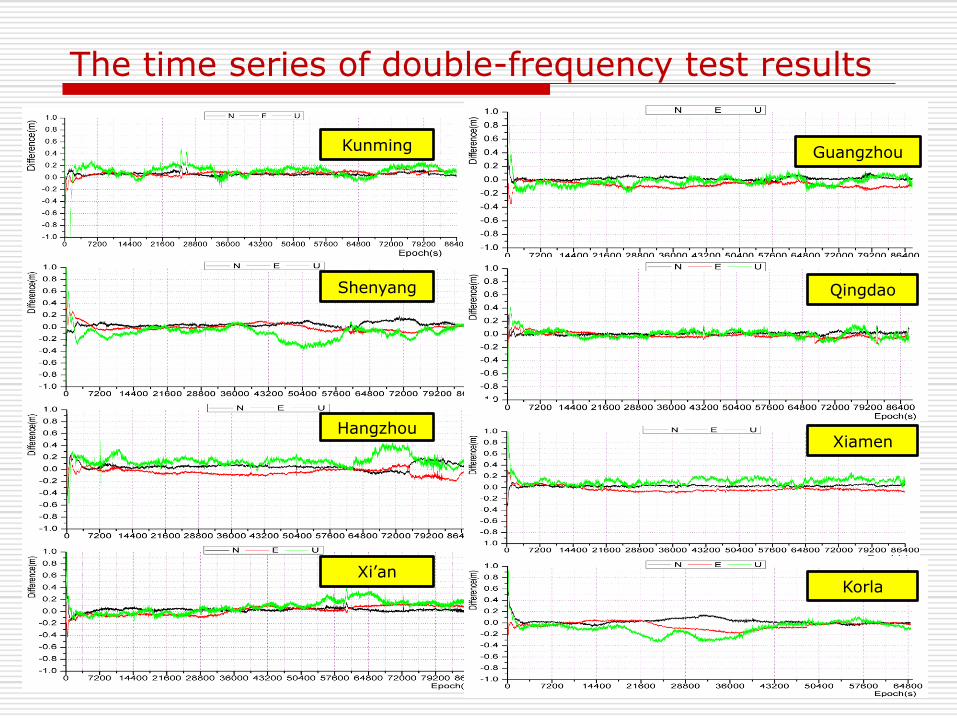
The time series of double-frequency test results
Shenyang
Kunming
Hangzhou
Xi’an
Guangzhou
Qingdao
Xiamen
Korla
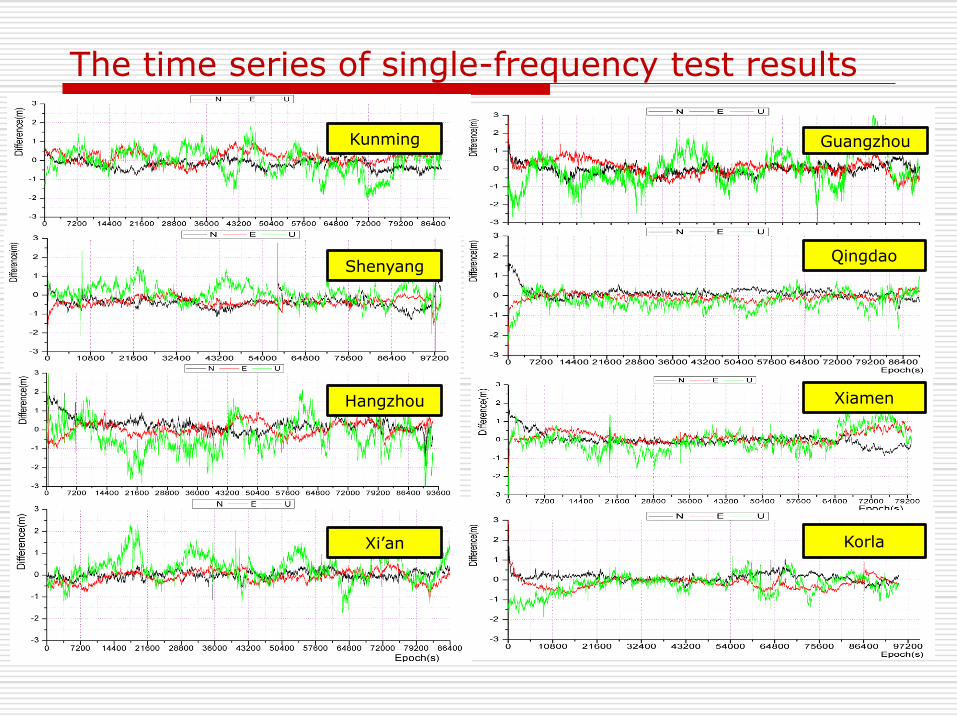
The time series of single-frequency test results
Shenyang
Kunming
Hangzhou
Xi’an
Guangzhou
Qingdao
Xiamen
Korla
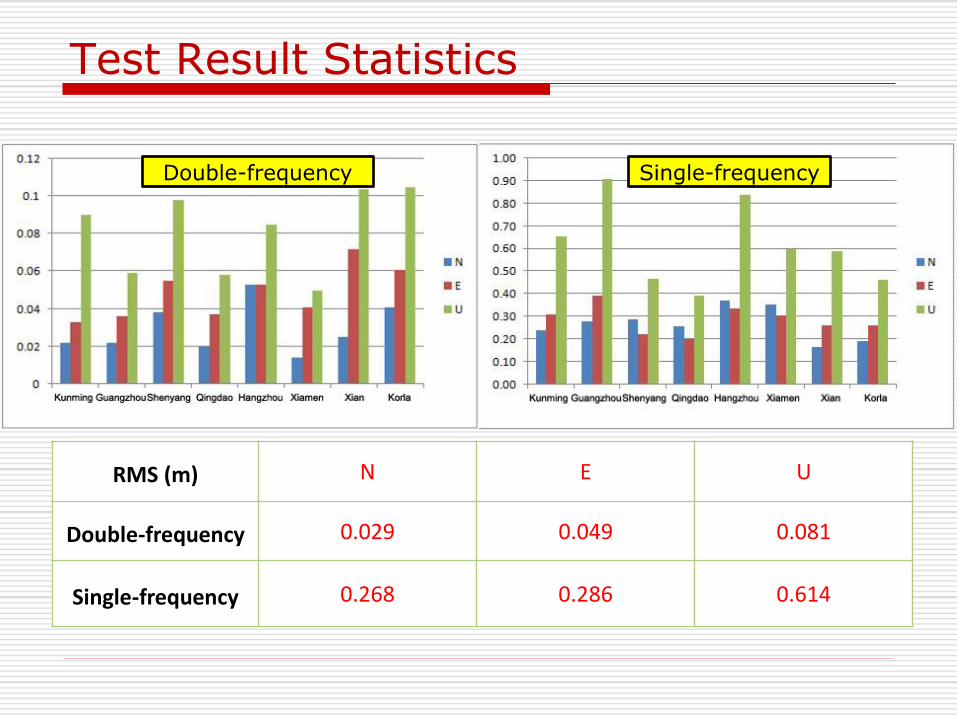
Test Result Statistics
RMS (m) N E U
Double-frequency 0.029 0.049 0.081
Single-frequency 0.268 0.286 0.614
Double-frequency Single-frequency
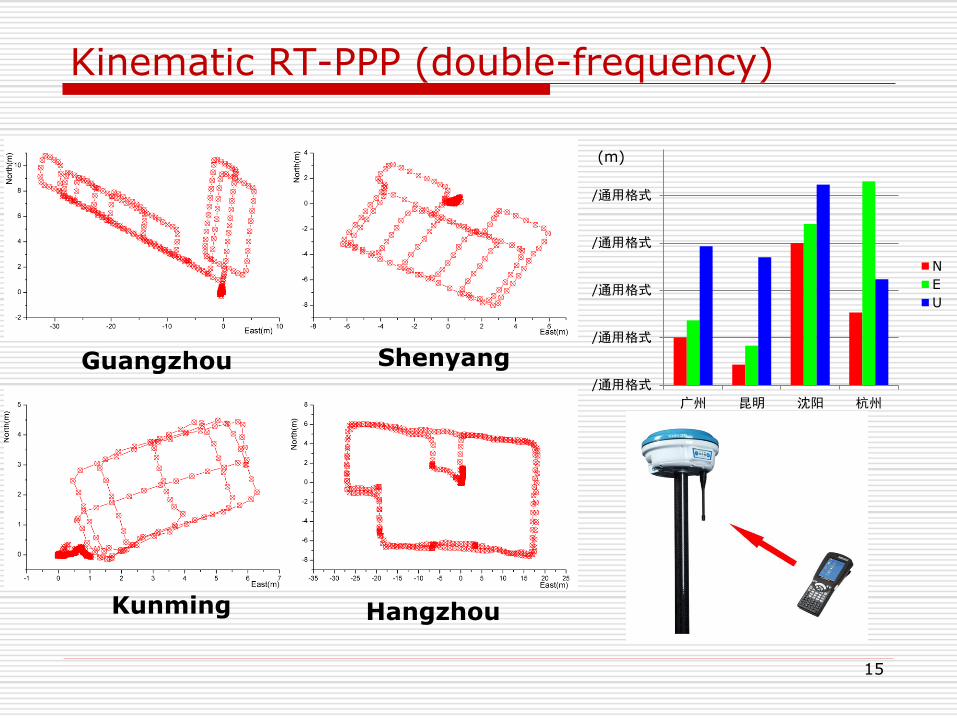
Kinematic RT-PPP (double-frequency)
15
Guangzhou
Kunming
Shenyang
Hangzhou
/通用格式
/通用格式
/通用格式
/通用格式
/通用格式
广州 昆明 沈阳 杭州
N
E
U
(m)
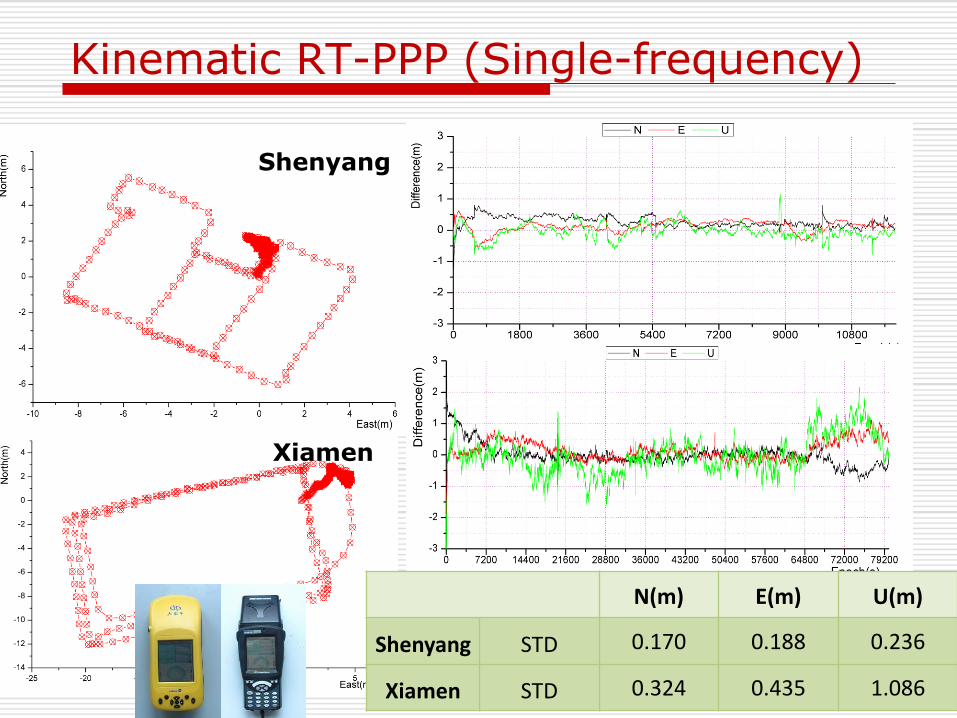
Kinematic RT-PPP (Single-frequency)
Shenyang
N(m) E(m) U(m)
Shenyang STD 0.170 0.188 0.236
Xiamen STD 0.324 0.435 1.086
Xiamen
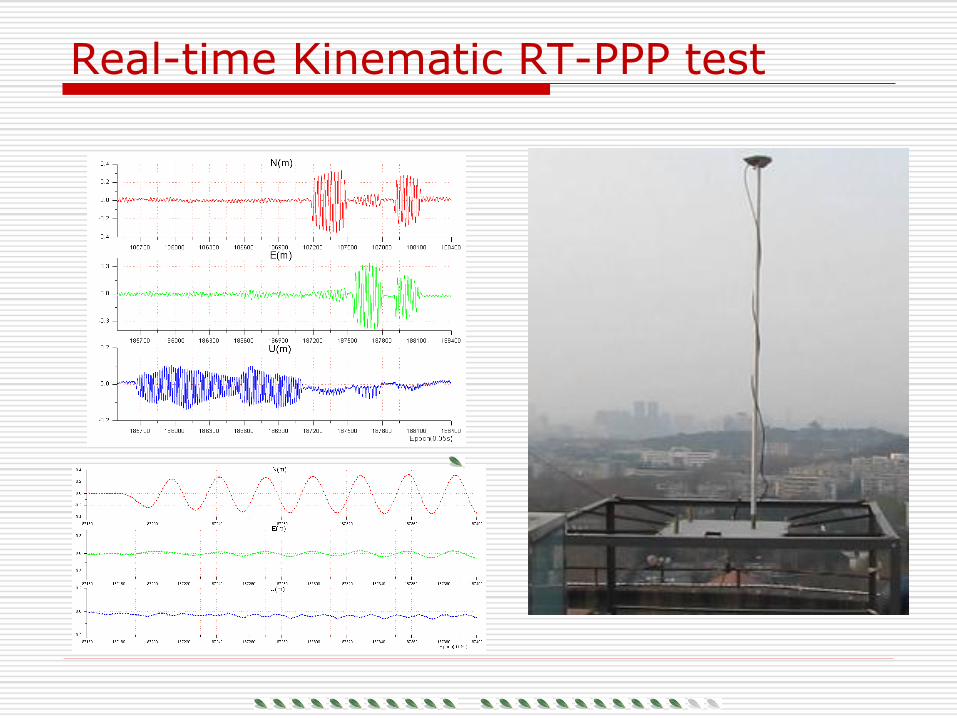
Real-time Kinematic RT-PPP test
Outline
Introduction of PANDA software
MASS Using PANDA
COMPASS Precise Position Results
Summary
COMPASS Precise Positioning and Navigation
Status of COMPASS
Baseline solutions (mm-level)
COMPASS RTK (cm level)
COMPASS PPP (dm level)
D-COMPASS Navigation (m level)
Benefit of GPS+COMPASS
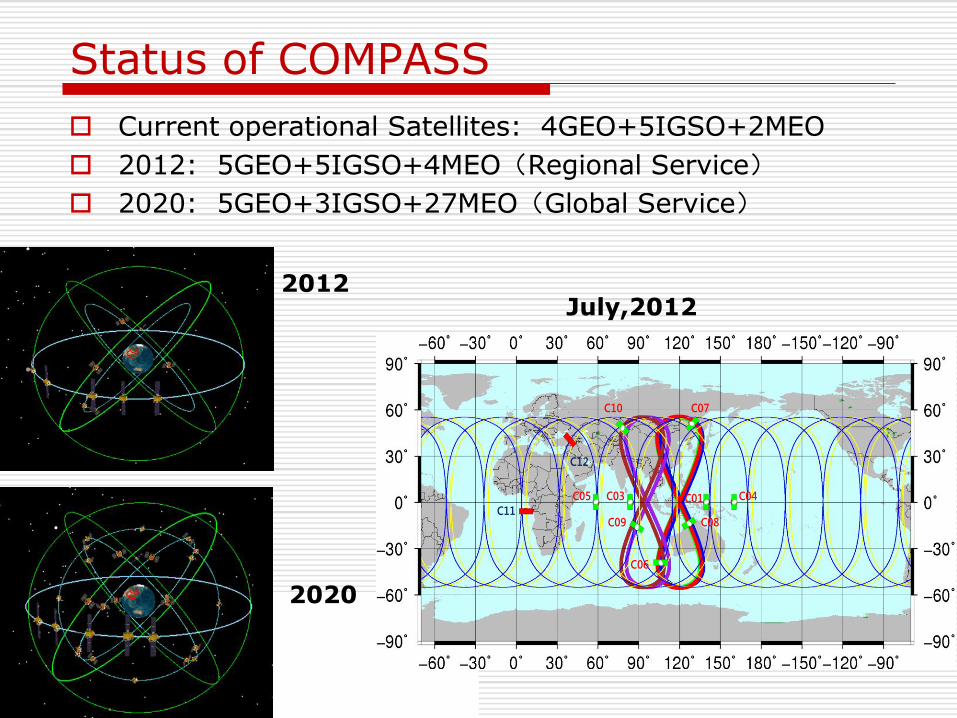
Status of COMPASS
Current operational Satellites: 4GEO+5IGSO+2MEO
2012: 5GEO+5IGSO+4MEO(Regional Service)
2020: 5GEO+3IGSO+27MEO(Global Service)
2012
2020
C05 C03 C01 C04
C06
C10 C07
C09 C08C11
C12
July,2012
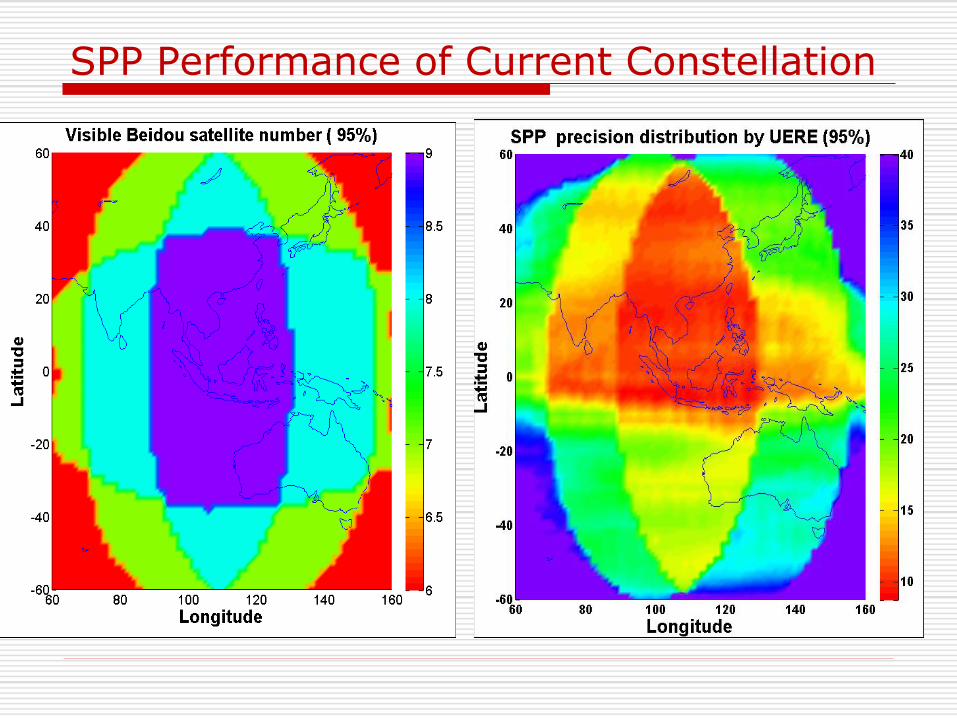
SPP Performance of Current Constellation
COMPASS Precise Positioning and Navigation
Status of COMPASS
Baseline Solutions (mm-level)
COMPASS RTK (cm level)
COMPASS PPP (dm level)
D-COMPASS Navigation (m level)
Benefit of GPS+COMPASS
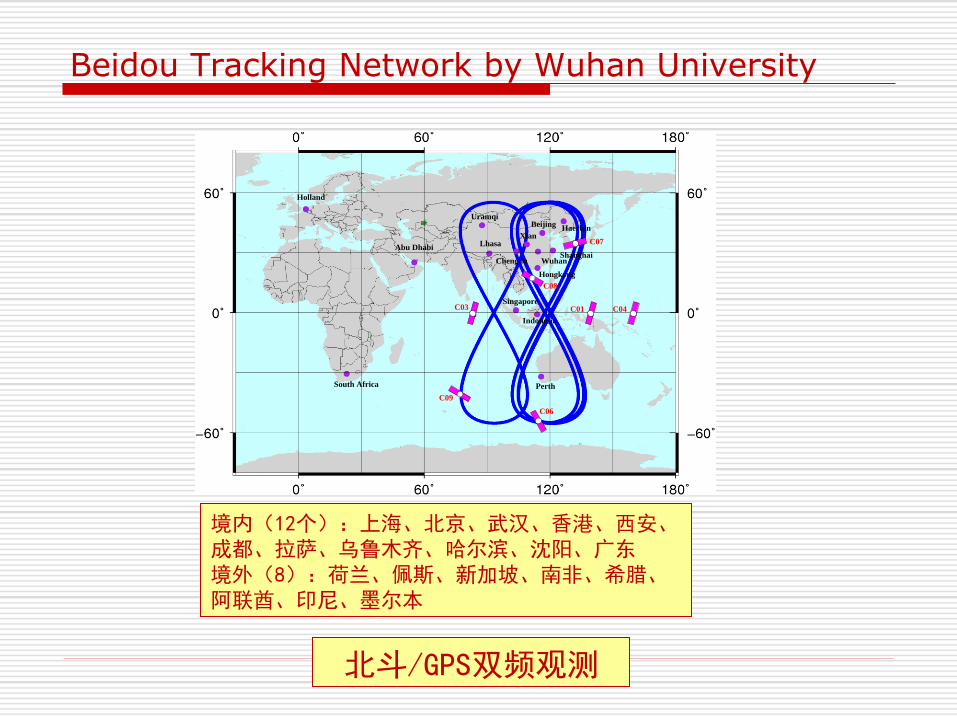
Beidou Tracking Network by Wuhan University
Holland
South Africa
Abu Dhabi
Uramqi
Lhasa
Perth
Indonesia
Singapore
Hongkong
WuhanShanghai
Xian
Chengdu
BeijingHaerbin
C03 C01 C04
C09
C06
C07
C08
境内(12个):上海、北京、武汉、香港、西安、成都、拉萨、乌鲁木齐、哈尔滨、沈阳、广东 境外(8):荷兰、佩斯、新加坡、南非、希腊、阿联酋、印尼、墨尔本
北斗/GPS双频观测

First Beidou CORS Network
6个框架网点+24个区域网点
16.8 km
5.6 km
21.7 km 12.7 km
4.3 km
9 km
WUHN-HBCS WDKJ-HBCS WUHN-WDKJ WUHN-CWKX HBCS-CWKX WDKJ-CWKX
-0.010
-0.008
-0.006
-0.004
-0.002
0.000
0.002
0.004
0.006
0.008
0.010
m
dE
dN
dU
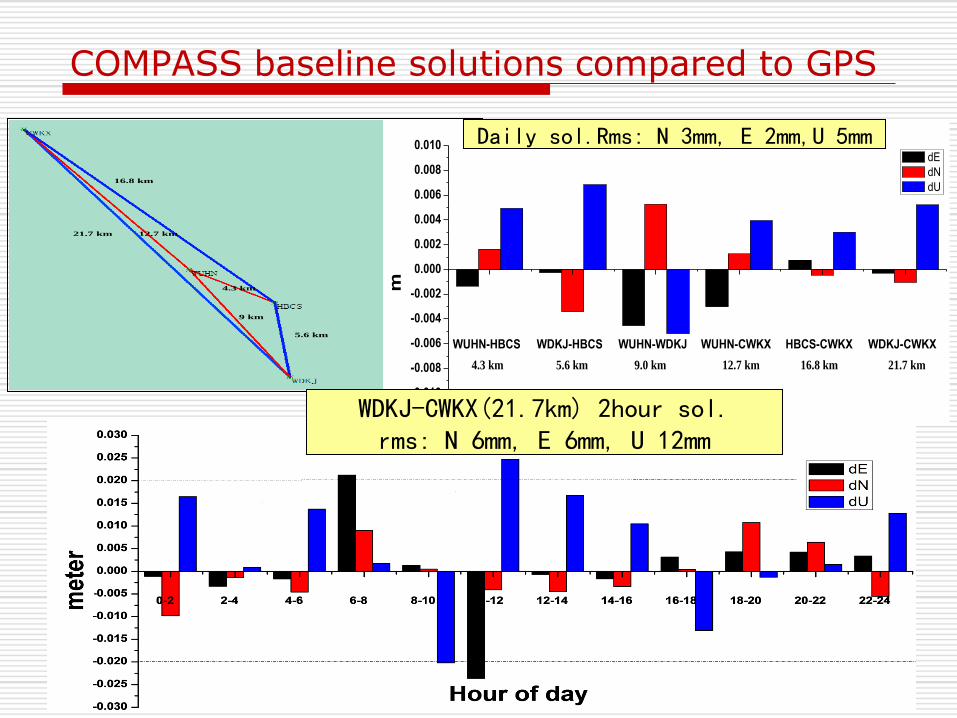
Beidou baseline static solutions compared to GPS
Baseline
4.3 km 5.6 km 12.7 km9.0 km 16.8 km 21.7 km
COMPASS baseline solutions compared to GPS
25
WDKJ-CWKX(21.7km) 2hour sol. rms: N 6mm, E 6mm, U 12mm
Daily sol.Rms: N 3mm, E 2mm,U 5mm
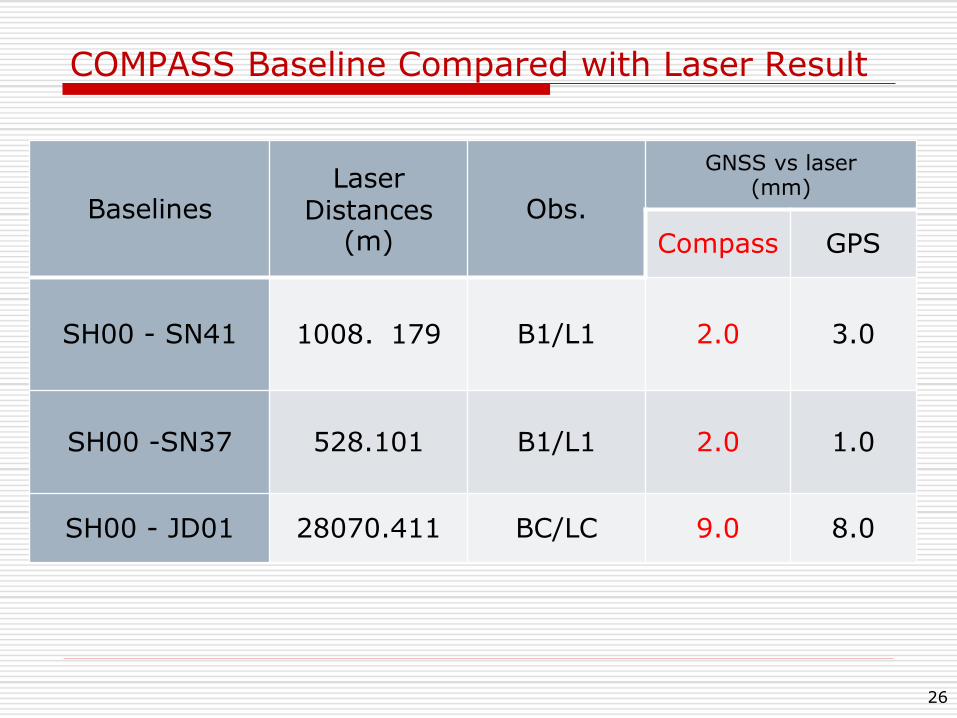
COMPASS Baseline Compared with Laser Result
26
Baselines Laser
Distances (m)
Obs.
GNSS vs laser (mm)
Compass GPS
SH00 - SN41 1008.179 B1/L1 2.0 3.0
SH00 -SN37 528.101 B1/L1 2.0 1.0
SH00 - JD01 28070.411 BC/LC 9.0 8.0
COMPASS Precise Positioning and Navigation
Status of COMPASS
Baseline Solutions (mm-level)
COMPASS RTK (cm level)
COMPASS PPP (dm level)
D-COMPASS Navigation (m level)
Benefit of GPS+COMPASS
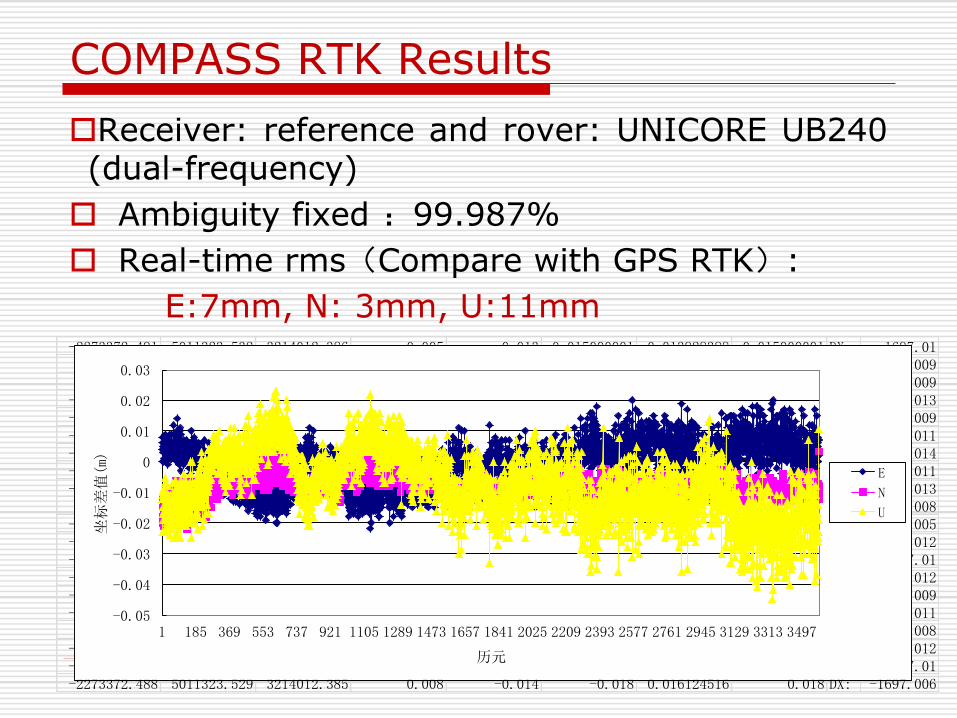
COMPASS RTK Results
Receiver: reference and rover: UNICORE UB240 (dual-frequency)
Ambiguity fixed :99.987%
Real-time rms(Compare with GPS RTK):
E:7mm, N: 3mm, U:11mm -2273372.491 5011323.532 3214012.386 0.005 -0.013 -0.015000001 0.013928388 0.015000001 DX: -1697.01-2273372.49 5011323.538 3214012.387 0.006 -0.012 -0.009000001 0.013416408 0.009000001 DX: -1697.009-2273372.49 5011323.53 3214012.385 0.006 -0.014 -0.017 0.015231546 0.017 DX: -1697.009-2273372.495 5011323.535 3214012.386 0.001 -0.013 -0.012 0.013038405 0.012 DX: -1697.013-2273372.491 5011323.531 3214012.384 0.005 -0.015 -0.016 0.015811388 0.016 DX: -1697.009-2273372.493 5011323.535 3214012.388 0.003 -0.011 -0.012 0.011401755 0.012 DX: -1697.011-2273372.496 5011323.542 3214012.389 0 -0.01 -0.005 0.01 0.005 DX: -1697.014-2273372.492 5011323.533 3214012.386 0.004 -0.013 -0.014 0.013601471 0.014 DX: -1697.011-2273372.495 5011323.54 3214012.385 0.001 -0.014 -0.007 0.014035669 0.007 DX: -1697.013-2273372.49 5011323.53 3214012.383 0.006 -0.016 -0.017 0.017088008 0.017 DX: -1697.008-2273372.487 5011323.525 3214012.381 0.009 -0.018 -0.022 0.020124612 0.022 DX: -1697.005-2273372.493 5011323.53 3214012.38 0.003 -0.019 -0.017 0.019235384 0.017 DX: -1697.012-2273372.492 5011323.53 3214012.383 0.004 -0.016 -0.017 0.016492423 0.017 DX: -1697.01-2273372.493 5011323.53 3214012.383 0.003 -0.016 -0.017 0.016278821 0.017 DX: -1697.012-2273372.491 5011323.531 3214012.384 0.005 -0.015 -0.016 0.015811388 0.016 DX: -1697.009-2273372.493 5011323.532 3214012.383 0.003 -0.016 -0.015000001 0.016278821 0.015000001 DX: -1697.011-2273372.49 5011323.534 3214012.388 0.006 -0.011 -0.013 0.012529964 0.013 DX: -1697.008-2273372.494 5011323.533 3214012.383 0.002 -0.016 -0.014 0.016124516 0.014 DX: -1697.012-2273372.492 5011323.527 3214012.38 0.004 -0.019 -0.02 0.019416488 0.02 DX: -1697.01-2273372.488 5011323.529 3214012.385 0.008 -0.014 -0.018 0.016124516 0.018 DX: -1697.006
-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
1 185 369 553 737 921 1105 1289 1473 1657 1841 2025 2209 2393 2577 2761 2945 3129 3313 3497
坐标差值(m)
历元
E
N
U
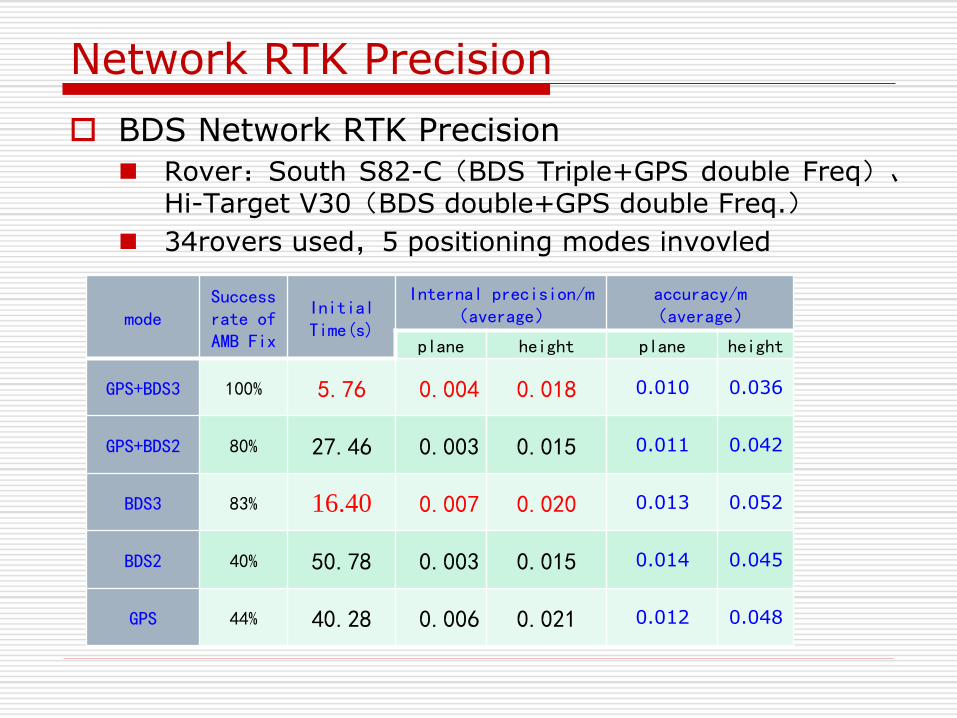
Network RTK Precision
BDS Network RTK Precision
Rover:South S82-C(BDS Triple+GPS double Freq)、Hi-Target V30(BDS double+GPS double Freq.)
34rovers used,5 positioning modes invovled
mode Success rate of AMB Fix
Initial Time(s)
Internal precision/m (average)
accuracy/m (average)
plane height plane height
GPS+BDS3 100% 5.76 0.004 0.018 0.010 0.036
GPS+BDS2 80% 27.46 0.003 0.015 0.011 0.042
BDS3 83% 16.40 0.007 0.020 0.013 0.052
BDS2 40% 50.78 0.003 0.015 0.014 0.045
GPS 44% 40.28 0.006 0.021 0.012 0.048
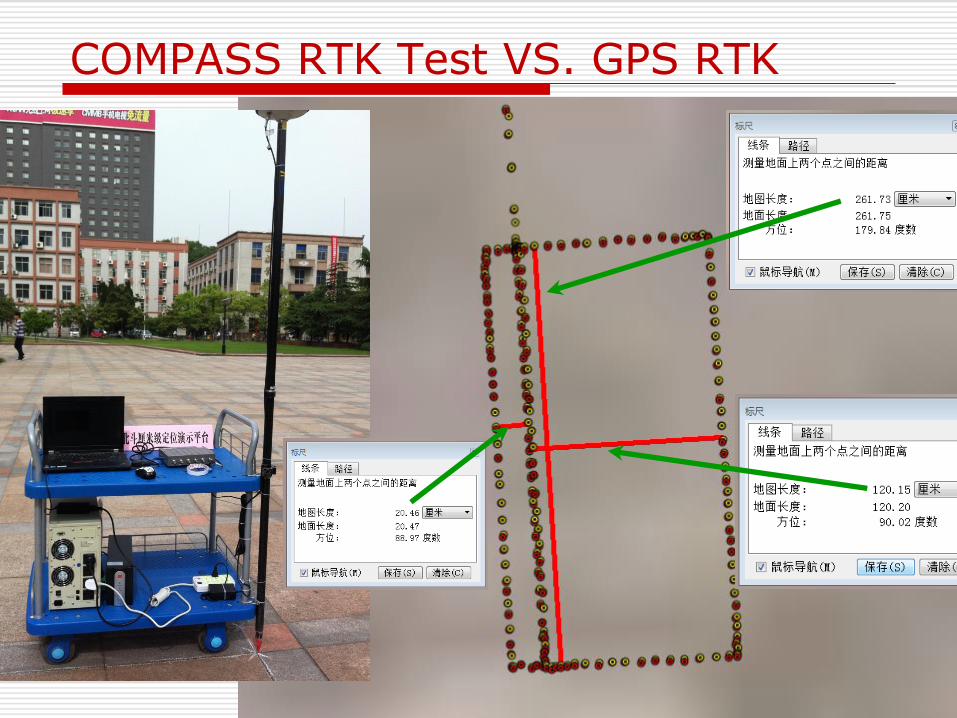
COMPASS RTK Test VS. GPS RTK
COMPASS Precise Positioning and Navigation
Status of COMPASS
Baseline Solutions (mm-level)
COMPASS RTK (cm level)
COMPASS PPP (dm level)
D-COMPASS Navigation (m level)
Benefit of GPS+COMPASS
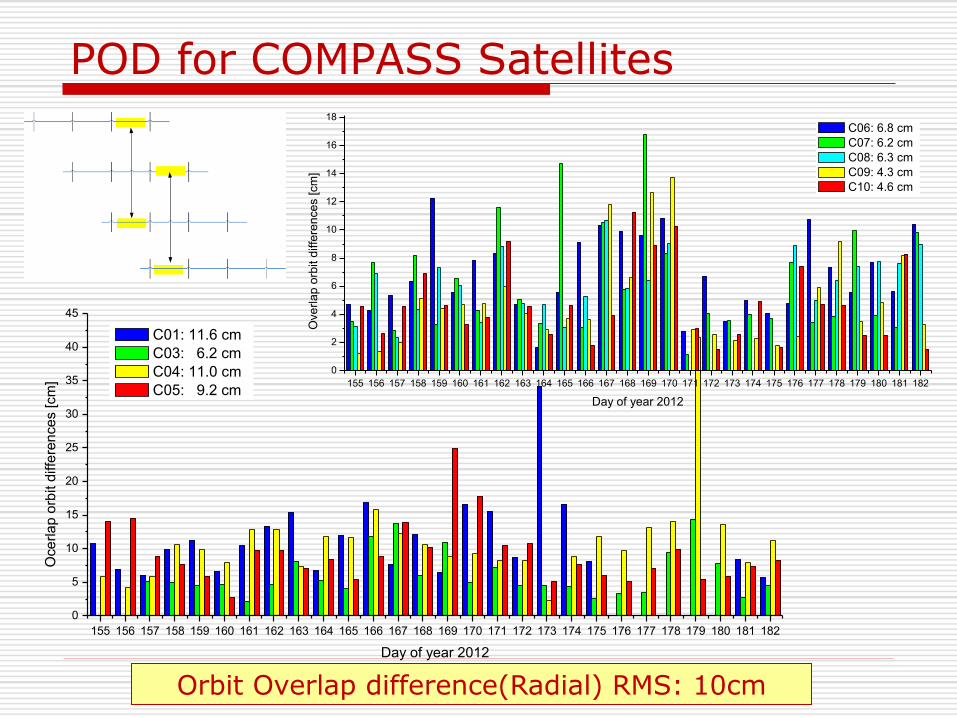
POD for COMPASS Satellites
Orbit Overlap difference(Radial) RMS: 10cm
155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182
0
5
10
15
20
25
30
35
40
45
Oce
rla
p o
rbit d
iffe
ren
ce
s [cm
]
Day of year 2012
C01: 11.6 cm
C03: 6.2 cm
C04: 11.0 cm
C05: 9.2 cm155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182
0
2
4
6
8
10
12
14
16
18
Ove
rla
p o
rbit d
iffe
ren
ce
s [cm
]
Day of year 2012
C06: 6.8 cm
C07: 6.2 cm
C08: 6.3 cm
C09: 4.3 cm
C10: 4.6 cm
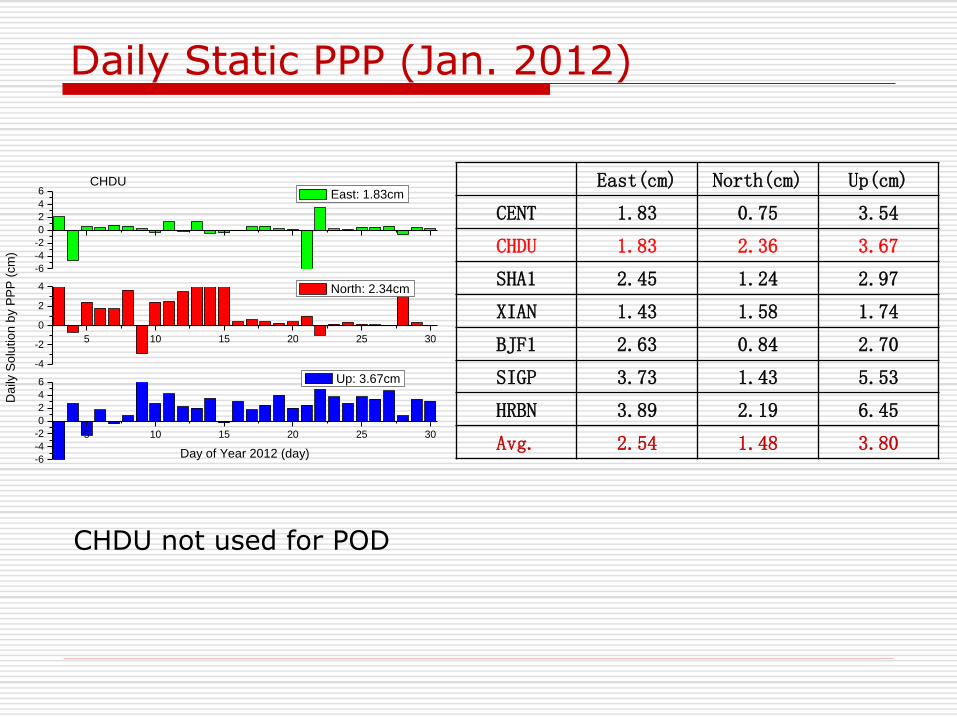
Daily Static PPP (Jan. 2012)
5 10 15 20 25 30
-6
-4
-2
0
2
4
6
Day of Year 2012 (day)
Up: 3.67cm
5 10 15 20 25 30
-4
-2
0
2
4
Da
ily S
olu
tio
n b
y P
PP
(cm
)
North: 2.34cm
CHDU
-6
-4
-2
0
2
4
6 East: 1.83cm
CHDU not used for POD
East(cm) North(cm) Up(cm)
CENT 1.83 0.75 3.54
CHDU 1.83 2.36 3.67
SHA1 2.45 1.24 2.97
XIAN 1.43 1.58 1.74
BJF1 2.63 0.84 2.70
SIGP 3.73 1.43 5.53
HRBN 3.89 2.19 6.45
Avg. 2.54 1.48 3.80
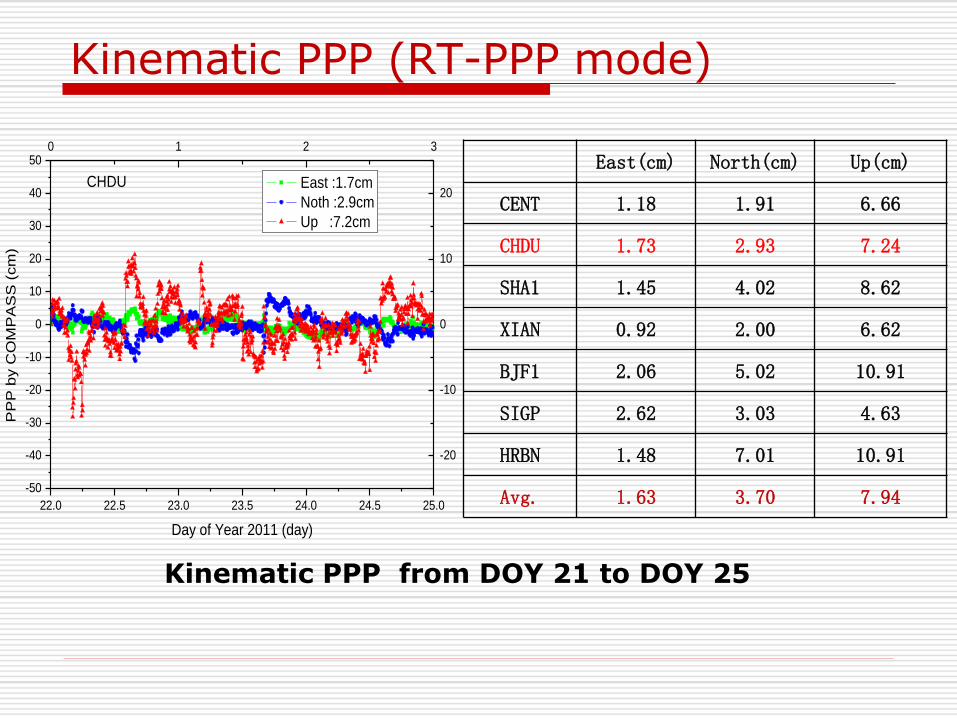
Kinematic PPP (RT-PPP mode)
22.0 22.5 23.0 23.5 24.0 24.5 25.0
-50
-40
-30
-20
-10
0
10
20
30
40
500 1 2 3
-20
-10
0
10
20 East :1.7cm
Noth :2.9cm
Up :7.2cm
PP
P b
y C
OM
PA
SS
(cm
)
Day of Year 2011 (day)
CHDU
Kinematic PPP from DOY 21 to DOY 25
East(cm) North(cm) Up(cm)
CENT 1.18 1.91 6.66
CHDU 1.73 2.93 7.24
SHA1 1.45 4.02 8.62
XIAN 0.92 2.00 6.62
BJF1 2.06 5.02 10.91
SIGP 2.62 3.03 4.63
HRBN 1.48 7.01 10.91
Avg. 1.63 3.70 7.94
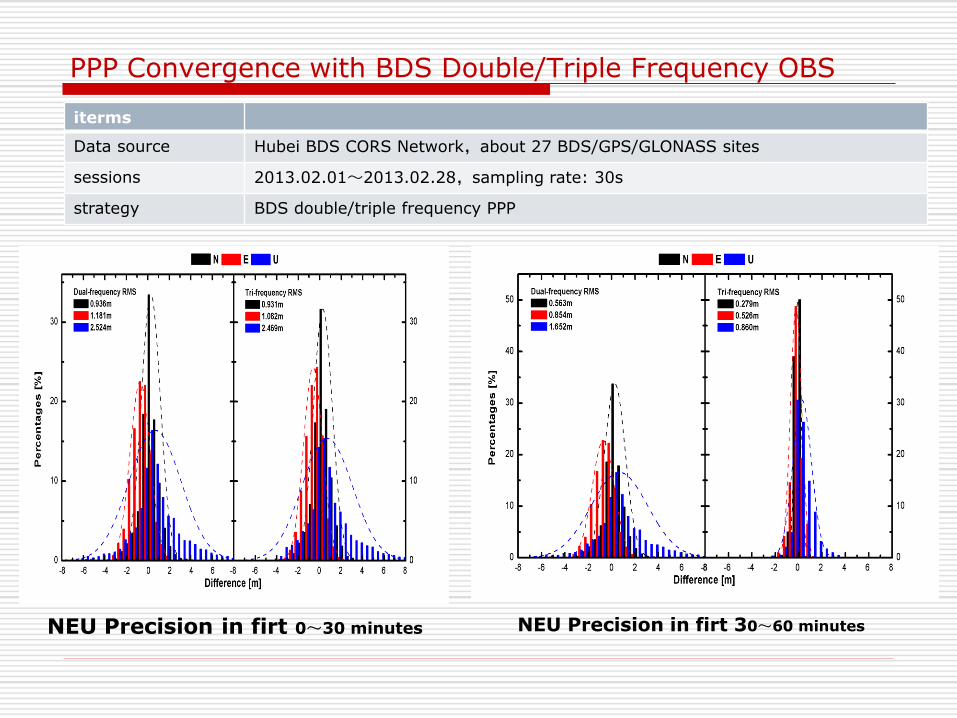
PPP Convergence with BDS Double/Triple Frequency OBS
iterms
Data source Hubei BDS CORS Network,about 27 BDS/GPS/GLONASS sites
sessions 2013.02.01~2013.02.28,sampling rate: 30s
strategy BDS double/triple frequency PPP
NEU Precision in firt 0~30 minutes NEU Precision in firt 30~60 minutes
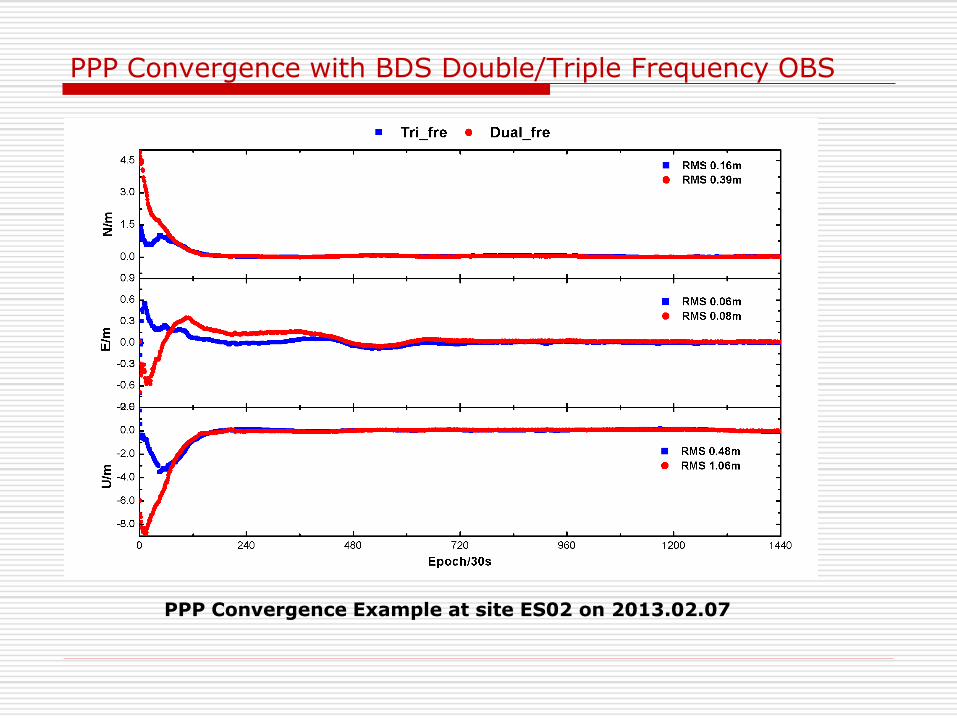
PPP Convergence with BDS Double/Triple Frequency OBS
PPP Convergence Example at site ES02 on 2013.02.07
COMPASS Precise Positioning and Navigation
Status of COMPASS
Baseline Solutions (mm-level)
COMPASS RTK (cm level)
COMPASS PPP (dm level)
D-COMPASS Navigation (m level)
Benefit of GPS+COMPASS
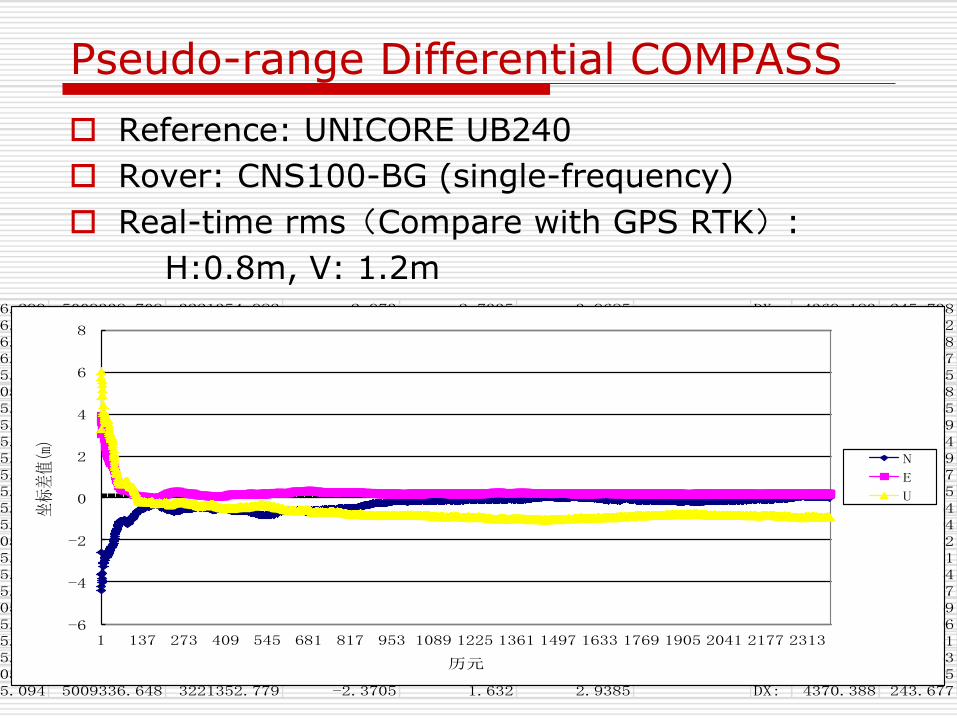
Pseudo-range Differential COMPASS
Reference: UNICORE UB240
Rover: CNS100-BG (single-frequency)
Real-time rms(Compare with GPS RTK):
H:0.8m, V: 1.2m
-2267306.299 5009338.708 3221354.982 -2.973 2.7335 3.9685 DX: 4369.183 245.738-2267306.092 5009338.472 3221354.741 -2.8695 2.613 3.8505 DX: 4369.389 245.502-2267306.027 5009338.299 3221354.533 -2.837 2.509 3.764 DX: 4369.455 245.328-2267306.002 5009338.167 3221354.347 -2.8245 2.416 3.698 DX: 4369.48 245.197-2267305.946 5009338.015 3221354.123 -2.7965 2.304 3.622 DX: 4369.536 245.045-2267305.89 5009337.951 3221353.939 -2.7685 2.212 3.59 DX: 4369.592 244.98-2267305.819 5009337.935 3221353.784 -2.733 2.1345 3.582 DX: 4369.663 244.965-2267305.816 5009338.109 3221353.761 -2.7315 2.123 3.669 DX: 4369.666 245.139-2267305.877 5009338.211 3221353.761 -2.762 2.123 3.72 DX: 4369.604 245.24-2267305.951 5009338.26 3221353.711 -2.799 2.098 3.7445 DX: 4369.531 245.29-2267305.986 5009338.427 3221353.705 -2.8165 2.095 3.828 DX: 4369.496 245.457-2267305.831 5009338.216 3221353.502 -2.739 1.9935 3.7225 DX: 4369.651 245.245-2267305.774 5009338.135 3221353.397 -2.7105 1.941 3.682 DX: 4369.708 245.164-2267305.823 5009338.165 3221353.431 -2.735 1.958 3.697 DX: 4369.659 245.194-2267305.77 5009337.902 3221353.327 -2.7085 1.906 3.5655 DX: 4369.711 244.932-2267305.641 5009337.611 3221353.211 -2.644 1.848 3.42 DX: 4369.841 244.641-2267305.497 5009337.31 3221353.083 -2.572 1.784 3.2695 DX: 4369.985 244.34-2267305.429 5009337.147 3221353.035 -2.538 1.76 3.188 DX: 4370.053 244.177-2267305.37 5009337.039 3221352.989 -2.5085 1.737 3.134 DX: 4370.112 244.069-2267305.302 5009336.966 3221352.946 -2.4745 1.7155 3.0975 DX: 4370.18 243.996-2267305.317 5009337.002 3221352.962 -2.482 1.7235 3.1155 DX: 4370.165 244.031-2267305.247 5009336.923 3221352.915 -2.447 1.7 3.076 DX: 4370.235 243.953-2267305.17 5009336.785 3221352.837 -2.4085 1.661 3.007 DX: 4370.312 243.815-2267305.094 5009336.648 3221352.779 -2.3705 1.632 2.9385 DX: 4370.388 243.677
-6
-4
-2
0
2
4
6
8
1 137 273 409 545 681 817 953 1089 1225 1361 1497 1633 1769 1905 2041 2177 2313
坐标差值(m)
历元
N
E
U
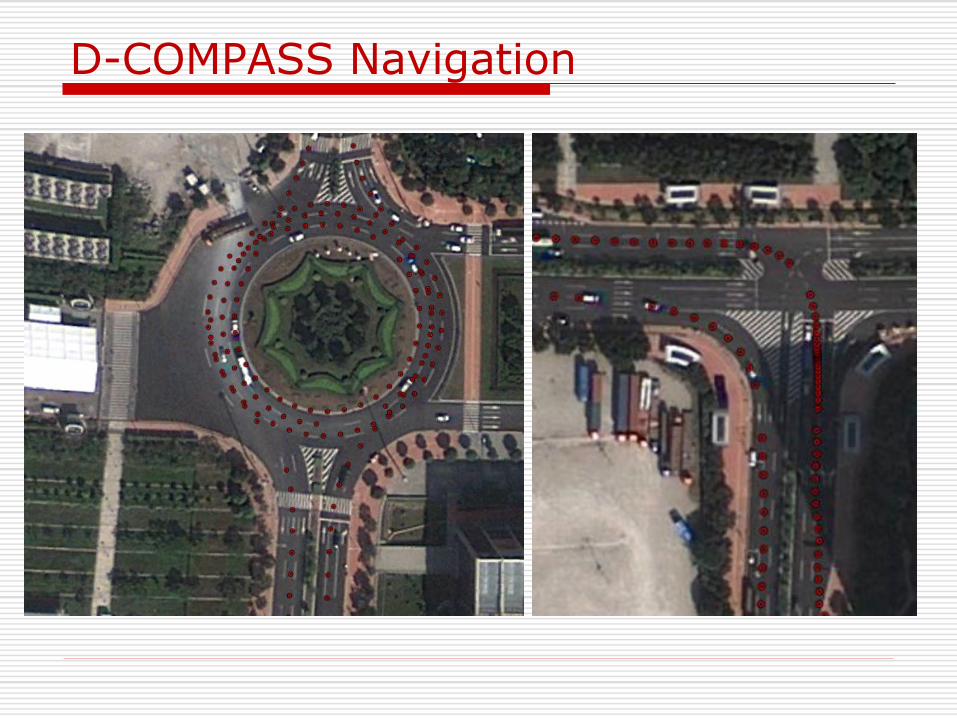
D-COMPASS Navigation
COMPASS Precise Positioning and Navigation
Status of COMPASS
Baseline Solutions (mm-level)
COMPASS RTK (cm level)
COMPASS PPP (dm level)
D-COMPASS Navigation (m level)
Benefit of GPS+COMPASS
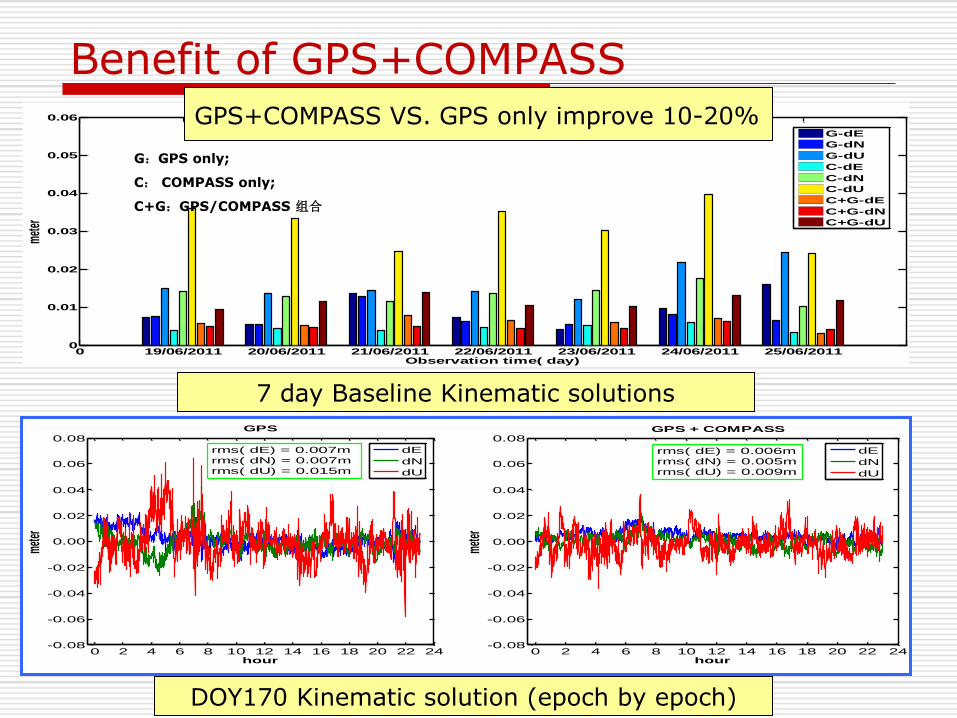
Benefit of GPS+COMPASS
DOY170 Kinematic solution (epoch by epoch)
7 day Baseline Kinematic solutions
0 2 4 6 8 10 12 14 16 18 20 22 24-0.08
-0.06
-0.04
-0.02
0.00
0.02
0.04
0.06
0.08
hour
met
er
GPS + COMPASS
dE
dN
dU
0 2 4 6 8 10 12 14 16 18 20 22 24-0.08
-0.06
-0.04
-0.02
0.00
0.02
0.04
0.06
0.08
hour
met
er
GPS
dE
dN
dU
rms( dE) = 0.006m
rms( dN) = 0.005m
rms( dU) = 0.009m
rms( dE) = 0.007m
rms( dN) = 0.007m
rms( dU) = 0.015m
0 19/06/2011 20/06/2011 21/06/2011 22/06/2011 23/06/2011 24/06/2011 25/06/20110
0.01
0.02
0.03
0.04
0.05
0.06
Observation time( day)
met
er
Time series of rms of baseline coordinate differences(kinematic)
G-dE
G-dN
G-dU
C-dE
C-dN
C-dU
C+G-dE
C+G-dN
C+G-dU
G:GPS only;
C: COMPASS only;
C+G:GPS/COMPASS 组合
GPS+COMPASS VS. GPS only improve 10-20%
Summary
PANDA software GNSS real-time products: orb., clo., ion., trop.,,,
Dm level RT-PPP
MASS developed in China Dm level RT-PPP for double-frequency
Better than 1m accuracy for single-frequency
COMPASS results Baseline: mm level @ 30km
RTK: cm level
PPP: dm level
Pseudo-range Differential: meter level
Comparing with GPS only, emerging Compass data could improve the accuracy of baseline kinematic solution about 10-20%
The GNSS Research Center of Wuhan University [email protected]













![Lecture 09 Prelimenary Itroduction to Well Logging [Compatibility Mode]](https://img.pdfslide.us/doc/110x75/545e8655af795937758b486c/lecture-09-prelimenary-itroduction-to-well-logging-compatibility-mode.jpg)














