Embed Size (px)
Citation preview




Initial Requirements
Engineering Requirement #
Importance Description Unit of Measure Marginal Value Test (how are you going to verify
satisfaction)
1.1 9 Accuracy and Minimum Angular Error of Attitudes Roll and Pitch degrees 2.5
Visual Measurement based on Aiming device ability to point at specified
target
1.2 9 Accuracy of Attitude Yaw degrees 2.5
Visual Measurement based on Aiming device ability to point at specified
target
1.3 9 Position Accuracy Error Horizontal meters 1.5
Visual Measurement based on Aiming device ability to point at specified
target
1.4 9 Position Accuracy Error Vertical meters 2.5
Visual Measurement based on Aiming device ability to point at specified
target
1.5 9 Position Accuracy Error Velocity meters/sec 0.1
Visual Measurement based on Aiming device ability to point at specified
target
Established December
2014
2.1 9 Accuracy of Error Over Time of Attitudes Roll and Pitch degrees/hr 3
Time-trial Visual Measurement based on Aiming device ability to point at
specified target
2.2 9 Accuracy of Error Over Time of Attitude Yaw degrees/hr 3
Time-trial of Visual Measurement based on Aiming device ability to point
at specified target
3.1 3 Number of Videos per Demo number 1 N/A
4.1 1 Geo-PNT is Mounted to a Mobile Object meters/sec >0 Basic Observation
5.1 9 Motion in Yaw degrees 360
Range of Motion Measurement and Analysis
5.2 9 Motion in Pitch and Roll degrees 180
Range of Motion Measurement and Analysis
6.1 9 System Functionality Continues without User Intervention N/A indefinate N/A
7.1 3 Provide User Manual N/A Y/N N/A 8.1 9 Provide Written and Visual Test Reports N/A Y/N N/A

Engineering Requirement #
Importance Description Unit of Measure Marginal
Value Test (how are you going to verify
satisfaction)
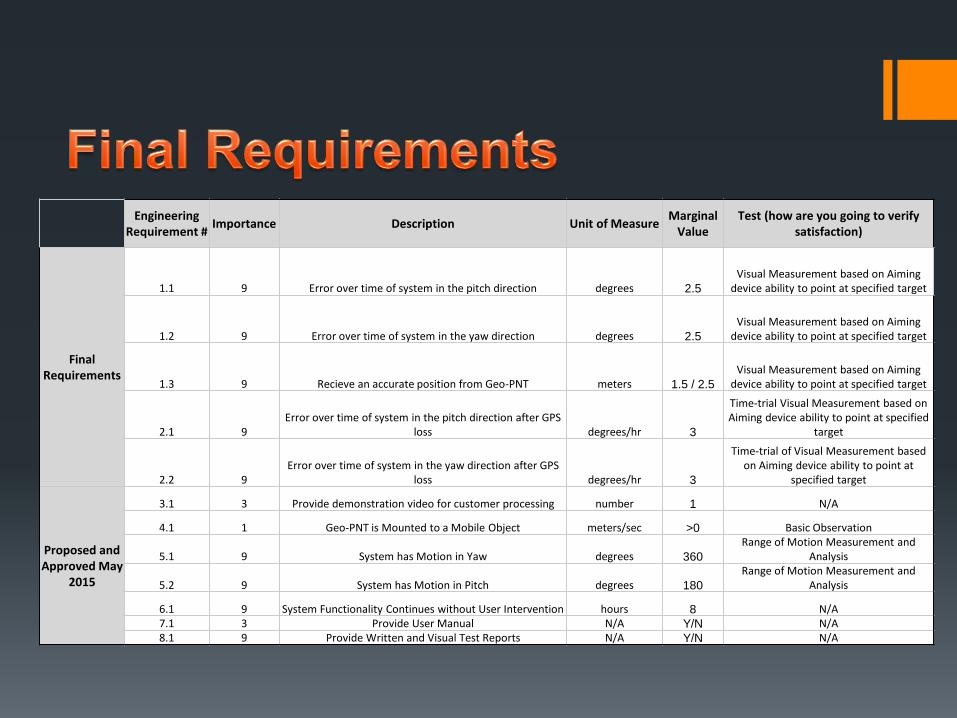
Final Requirements
1.1 9 Error over time of system in the pitch direction degrees 2.5
Visual Measurement based on Aiming device ability to point at specified target
1.2 9 Error over time of system in the yaw direction degrees 2.5
Visual Measurement based on Aiming device ability to point at specified target
1.3 9 Recieve an accurate position from Geo-PNT meters 1.5 / 2.5
Visual Measurement based on Aiming device ability to point at specified target
2.1 9 Error over time of system in the pitch direction after GPS
loss degrees/hr 3
Time-trial Visual Measurement based on Aiming device ability to point at specified
target
2.2 9 Error over time of system in the yaw direction after GPS
loss degrees/hr 3
Time-trial of Visual Measurement based on Aiming device ability to point at
specified target
Proposed and Approved May
2015
3.1 3 Provide demonstration video for customer processing number 1 N/A
4.1 1 Geo-PNT is Mounted to a Mobile Object meters/sec >0 Basic Observation
5.1 9 System has Motion in Yaw degrees 360
Range of Motion Measurement and Analysis
5.2 9 System has Motion in Pitch degrees 180
Range of Motion Measurement and Analysis
6.1 9 System Functionality Continues without User Intervention hours 8 N/A 7.1 3 Provide User Manual N/A Y/N N/A 8.1 9 Provide Written and Visual Test Reports N/A Y/N N/A

Cost of Each Category
Internal Box Mechanical Hardware: $168.07
External Mechanical Hardware: $63.48
External Electrical Hardware: $544.84
Internal Box Electrical Hardware: $260.61
Demonstration/Video Costs: $50.00
PCB: $78.12
Total Cost without Contingency: $1,165.12
20 % Contingency: $233.02
Total Cost + Contingency: $1,398.14
* Note All Costs w/o Shipping
Cost of Each Category
Sub Total $1,737.94
Sales Tax $16.10
Shipping $51.94
Grand Total $1,805.98



Device Required Voltage [V] Required Current [A] Total Power
Consumption [W]
Geo-PNT 10V Minimum
30V Maximum
2A 20W Minimum
60W Maximum
Arduino Mega
Microcontroller
5V Minimum
12V Maximum
9V Optimum
0.500A 2.5W Minimum
6W Maximum
ServoCity PT785
Motorized Camera
Mount
6V Minimum
7.2V Maximum
3A 18W Minimum
21.6W Maximum






Frame Second X_Pixel Y_Pixel Degrees Off:
1 1 1001 496 6.70276642
31 2 841 501 4.26600774
61 3 637 484 2.15514534
91 4 539 484 2.77877008
121 5 513 484 3.08402262
151 6 563 475 2.40468146
181 7 616 484 2.19449898
211 8 645 475 2.00002651
241 9 686 483 2.28170457
271 10 678 482 2.2202113
301 11 680 475 2.11555911
331 12 691 483 2.31356753
361 13 704 476 2.30192473
391 14 716 462 2.21012619
421 15 715 499 2.74427906
451 16 712 492 2.61251556
481 17 709 502 2.74312372
511 18 706 566 3.75849188
541 19 708 543 3.39206667
571 20 671 434 1.39402181
601 21 658 546 3.24687022
631 22 665 532 3.01992382
661 23 667 526 2.92217287
691 24 658 520 2.7975562
721 25 664 509 2.62226195
751 26 668 521 2.83938382
781 27 662 502 2.49670257
811 28 646 534 3.02506777
841 29 638 547 3.24933326
871 30 617 532 3.01512155
901 31 613 513 2.69946968
931 32 602 512 2.72229929
961 33 613 521 2.83645841
991 34 603 550 3.3632865
1021 35 582 547 3.40184262
1051 36 565 538 3.35609787
1081 37 529 587 4.39044219
1111 38 492 587 4.70840105
1141 39 455 579 4.98111691
1171 40 403 590 5.73823696
Actual
0
1
2
3
4
5
6
7
8
0 5 10 15 20 25 30 35 40
Erro
r (d
egr
ees)
Time (seconds)
Degrees Error over Time
Degrees Error
Acceptable Error
Engineering Requirement #
Importance Description Unit of Measure Marginal
Value Test (how are you going to verify
satisfaction)
Final Requirements
1.1 9 Error over time of system in the pitch direction degrees 2.5
Visual Measurement based on Aiming device ability to point at specified target
1.2 9 Error over time of system in the yaw direction degrees 2.5
Visual Measurement based on Aiming device ability to point at specified target
1.3 9 Recieve an accurate position from Geo-PNT meters 1.5 / 2.5
Visual Measurement based on Aiming device ability to point at specified target
2.1 9 Error over time of system in the pitch direction after GPS
loss degrees/hr 3
Time-trial Visual Measurement based on Aiming device ability to point at specified
target
2.2 9 Error over time of system in the yaw direction after GPS
loss degrees/hr 3
Time-trial of Visual Measurement based on Aiming device ability to point at
specified target
Proposed and Approved May
2015
3.1 3 Provide demonstration video for customer processing number 1 N/A
4.1 1 Geo-PNT is Mounted to a Mobile Object meters/sec >0 Basic Observation
5.1 9 System has Motion in Yaw degrees 360
Range of Motion Measurement and Analysis
5.2 9 System has Motion in Pitch degrees 180
Range of Motion Measurement and Analysis
6.1 9 System Functionality Continues without User Intervention hours 8 N/A 7.1 3 Provide User Manual N/A Y/N N/A 8.1 9 Provide Written and Visual Test Reports N/A Y/N N/A

Engineering Requirement
#
Unit of Measure
Marginal Value
Value Acheived
Performance Description Bottomline
Performance vs Final
Requirements
1.1 degrees 2.5 2.65
At the current time, this requirement is satisfied however we realize that the initial marginal value may not have been acceptable to our customer Spectracom despite being approved and therefore we aim to provide more accurate tracking video and data by handoff.
Satisfied
1.2 degrees 2.5 2.65
At the current time, this requirement is satisfied however we realize that the initial marginal value may not have been acceptable to our customer Spectracom despite being approved and therefore we aim to provide more accurate tracking video and data by handoff.
Satisfied
1.3 meters 1.5 / 2.5 2 Fully met. Satisfied
2.1 degrees/h
r 3 -
At the current time, this capability to fufill this requirement has been developed but the requirement has not been met. We are aiming to satisfy this requirement by handoff.
Unsatisfied
2.2 degrees/h
r 3 -
At the current time, this capability to fufill this requirement has been developed but the requirement has not been met. We are aiming to satisfy this requirement by handoff.
Unsatisfied
May 2015
3.1 number 1 1 Full promotional and inital tracking and error video provided. Conditionally met. (80%). P15310 aims to provide more accurate tracking video and error data by handoff.
Satisfied
4.1 meters/se
c >0 0<x<20 Fully met. Satisfied
5.1 degrees 360 360 Fully met. Satisfied
5.2 degrees 180 180 Fully met. Satisfied
6.1 hours 8 12 Fully met. Satisfied
7.1 N/A Y/N Y Fully met. Satisfied
8.1 N/A Y/N Y Fully met. Satisfied




![[PPT]PowerPoint Presentationedge.rit.edu/edge/OldEDGE/public/Archives/P06201/PDR.ppt · Web viewTitle PowerPoint Presentation Last modified by brl4482 Created Date 1/1/1601 12:00:00](https://img.pdfslide.us/doc/110x75/5ab71b827f8b9ab7638e764e/pptpowerpoint-viewtitle-powerpoint-presentation-last-modified-by-brl4482-created.jpg)

























