Embed Size (px)
Citation preview

Special Issue Article
Proc IMechE Part M:J Engineering for the Maritime Environment2018, Vol. 232(1) 50–70� IMechE 2017Reprints and permissions:sagepub.co.uk/journalsPermissions.navDOI: 10.1177/1475090217731671journals.sagepub.com/home/pim
Power production assessment for waveenergy converters: Overcoming theperils of the power matrix
Alexis Merigaud and John V Ringwood
AbstractWave energy converter power production assessment, usually carried out using a power matrix, is essential for theappraisal of new wave energy converter technologies and for the planning of specific wave energy projects. Errors inpower assessment may arise, both from an inaccurate description of the wave energy converter dynamics and from anexcessively simplified representation of wave spectra in the power matrix approach. Ideally, the wave energy converteroutput should be computed in every individual sea state of the wave dataset considered, without the assumption of anyparametric spectral shape. However, computationally efficient methods are necessary to achieve such extensive waveenergy converter simulation. The non-linear frequency-domain technique is significantly faster than Runge–Kutta time-domain simulations, without affecting the representation of radiation forces and non-linear dynamics. In this article, thetwo main sources of errors in wave energy converter power assessment, namely the power matrix representation andwave energy converter modelling inaccuracies, are jointly studied and put into perspective, using four case studies (twowave energy converter systems in two locations). It is found that both types of errors can be of comparable magnitude.The non-linear frequency-domain technique simulation technique is shown to be a computationally efficient tool, retain-ing a realistic representation of the device dynamics while avoiding the use of a power matrix, thus preserving accuraterepresentation of both the sea states and the wave energy converter, at little computational expense. Aside from thosemain results, the issue of the length and number of simulations, necessary to achieve average power estimates with suffi-cient accuracy in every sea state, is addressed in detail.
KeywordsPower assessment, wave spectrum, numerical simulation, wave energy converter, average power estimates, powermatrix, non-linear models, non-linear frequency domain
Date received: 12 March 2017; accepted: 7 August 2017
Introduction
At the current development stage of wave energy con-verter (WEC) technologies, WEC power productionassessment is essential to evaluate and compare thepotential of various wave energy conversion technolo-gies at different locations.1–8 In the future, powerassessment will also be instrumental in determining theeconomic viability of specific wave energy projects. In awider sense, WEC power production assessment coversstudies concerning the variability of WEC productionover different time, and geographical, scales.7,9–12
The general methodology for power productionassessment consists of using historical wave data for aspecific location, over typically a year or more, andsimulating the WEC power output over the chosenduration. The findings of Torsethaugen13 suggest that a
1-year period is insufficient and that a 10-year assess-ment is necessary. At every time step of the period con-sidered, that is, typically every 1–3 h, the power outputis computed from the knowledge of the wavespectrum – or the wave elevation data if those are avail-able at the location of interest. As a consequence,power assessment involves the computation of theWEC output in a large number of sea states, which is
Centre for Ocean Energy Research, Department of Electronic
Engineering, Maynooth University, Maynooth, Ireland
Corresponding author:
Alexis Merigaud, Centre for Ocean Energy Research, Department of
Electronic Engineering, Maynooth University, Maynooth, Co. Kildare,
Ireland.
Email: [email protected]

carried out, in the vast majority of studies, using thepower matrix (PM) representation of the device.
The PM is a concise WEC representation, showingthe WEC response, in terms of average power produc-tion, as a function of two parameters describing the seastate. Thus, in a PM, sea states are characterised bymeans of only two parameters, generally the significantwave height Hm0
and the peak wave period Tp, assum-ing a parametric spectral shape such as a Joint NorthSea Wave Project (JONSWAP)14 or Bretschneider15
spectrum for the waves. The device output is computedover a range of Hm0
, Tp pairs, each pair representing acell of the PM. Then, in a given sea state, the poweroutput is predicted by matching the Hm0
, Tp para-meters of the spectrum with the corresponding cell ofthe PM, using interpolation between neighbouring PMcells, as necessary.
Furthermore, if only the annual power value is ofinterest, the PM can simply be multiplied by the scatterplot of the site considered,1 the value in each cell of thescatter plot representing the probability of occurrenceof a given Hm0
, Tp pair. The PM approach thereforehas appealing computational properties, compared tothe performance of a WEC simulation for every indi-vidual sea state.
The benefits of the PM are even more obvious whenthe WEC dynamical description includes non-lineareffects, such as quadratic viscous drag terms, non-linearpower take-off (PTO) forces, a non-linear Froude–Krylov force description or non-linear mooring effects.In such cases, for a given spectrum, time-domain simu-lations are the standard method of obtaining the WECoutput.16 The computational cost of time-domain simu-lations is significant, in comparison to linear frequency-domain WEC output calculations, which simply neces-sitate a multiplication of the input wave spectrum bythe WEC linear transfer function. Therefore, whilecomputing the WEC output by means of time-domainsimulations, for all individual spectra of the period con-sidered, would represent a significant computationalburden, filling in the cells of a PM and using the(Hm0
, Tp) scatter diagram is much less demanding.However, regardless of the linearity of the WEC
description, the PM approach can be subject to signifi-cant limitations in terms of accuracy, since two-parameter wave spectra cannot reflect the variety ofspectral shapes which can be encountered in real seas.In particular, bi- or multi-modal sea states are poorlyrepresented with just two parameters. Given that themore energetic sea states are closer to standard, theore-tical spectral shapes, it could be assumed that the errorcommitted when using a PM is relatively modest.17
However, recent work2 tends to show that, dependingon the WEC type and location, using a PM approach,and assuming a JONSWAP spectral shape, can resultin an error of up to 20% in terms of average annualenergy production, compared to computing the WECoutput using the actual spectra. On a sea state by
sea-state basis (i.e. for a given 3-h spectrum), the errorcommitted can amount to 200%.
In summary, there are two potential sources of errorin typical power production assessment computations:
� The dynamical description of the device can beinsufficiently realistic. In particular, linearfrequency-domain models, although computation-ally efficient, fail in capturing non-linear dynamics,especially under controlled conditions.18 Time-domain models can be used in order to includenon-linear effects; however, time-domain simula-tion over the entire set of sea states for an extendedperiod is computationally demanding. Therefore,time-domain models are normally used to fill ineach cell of a PM,1,5 rather than to simulate theWEC in every individual sea state.
� The sea-state description, through the two para-meters of a PM, can also be the cause of incorrectestimates.
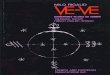
Finally, within the scope of power production assess-ment studies, four main types of WEC representationscan be identified and are shown in Figure 1:
1. A PM, with the entries determined from a linearWEC model, hereafter referred to as PM-L;
2. A PM, with the entries determined from a non-linear WEC model, or determined through experi-mental measurements (PM-NL);1,5
3. A linear WEC representation, simulated in everyindividual sea state without assuming any pre-defined spectral shape (S-L), such as in De Andreset al.2 for a Portuguese location;
4. A non-linear WEC representation, simulated inevery individual sea state without assuming anypre-defined spectral shape (S-NL).
PM-L requires negligible computational effort, butaccumulates the two sources of error described above,that is, in the description of sea states and WECdynamics.
Figure 1. Four main categories of WEC representations forpower assessment, along with the associated accuracy andcomputational cost.
Merigaud and Ringwood 51

PM-NL, although describing the system dynamicsaccurately, is subject to errors related to the misrepre-sentation of the sea spectra. Since only the PM cellshave to be filled in, the computational cost of PM-NLis moderate, even if time-domain simulations are used,such as in Babarit et al.1 and Rusu and Onea.5
S-L, in contrast, represents the wave spectra accu-rately, at the expense of the description of non-linearWEC dynamics. The computational cost associatedwith S-L is small, since linear power computation foreach individual spectrum is extremely fast.
There exists a ‘grey zone’ between PMs and full spec-trum representation. For example, it has been suggestedto add more spectral parameters to the PM entries.Such additional spectral parameters can characterisethe whole spectral shape, such as wave groupiness andspectral bandwidth.19 Describing individual wave sys-tems which compose the spectrum could also be consid-ered.20 However, a multi-dimensional PM involves alarge number of cells to be filled in; for example, withfour parameters, assuming that the range of values foreach parameter is discretised into 10 intervals, the num-ber of bins to fill in is in the order of 10,000.
Another interesting method is the MaxDiss selectiontechnique, used in De Andres et al.:2 the PM has threeentries, namely Hm0
, Tp and a broadness parameter e0.Within the historical wave data at a specific location, alimited number of spectra are chosen, which span therange of (Hm0
, Tp, e0) triplets encountered at the siteunder study. Then, instead of assuming a JONSWAPspectral shape, the PM is built using the selected seastates, combined with an interpolation technique. Theresulting PM is then based on a more faithful represen-tation of the spectra which characterise the location, atmoderate computational cost. Although the WEC mod-els studied in De Andres et al.2 are linear, the techniquecould be usefully applied to non-linear WEC descrip-tions. However, regardless of the WEC dynamics, theresulting WEC representation is site-specific, and theprocedure has to be carried out again for studies inother locations.
S-NL should represent the ideal WEC power assess-ment method, in terms of accuracy, since both the seastate and the device are accurately represented, withoutany approximation other than the limitations inherentto any physical WEC model. However, it is generallyconsidered that non-linearities in the WEC model haveto be handled by means of time-domain simulations(bottom right cell in Figure 1), which makes S-NL com-putation over the whole dataset relatively intractable.
Nevertheless, other calculation methods exist, whichallow for computationally efficient estimation of theWEC outputs while taking into account the systemnon-linearities. In particular, the recently proposednon-linear frequency-domain (NLFD) method21,22
enables the non-linear, steady-state system response toa periodic, polychromatic wave signal, to be efficientlyand accurately computed. NLFD relies on the projec-tion of the dynamical equations onto a basis of
harmonic sinusoids. The resulting set of non-linearequations is then solved using a gradient-based algo-rithm. NLFD can be successfully applied to WECsimulation,22 since:
� Without requiring any approximation of the radia-tion force, the computational gain is at least twoorders of magnitude lower than a typical second-order Runge–Kutta (RK2) integration (using adirect computation of the radiation force convolu-tion product).
� Due to the quadratic convergence rate of thegradient-based algorithm, the estimated WEC tra-jectory can be made arbitrarily accurate at little orno additional computational cost. The case studiesof Merigaud and Ringwood22 show that time-domain results converge to NLFD results, whenthe time-domain integration step tends to zero.
When such computationally efficient calculationmethods are available, the benefits of using a PM-NLare no longer obvious, with respect to a computation ofthe WEC output for all the individual spectra, using afrequency-domain formalism to solve for the non-linearWEC motion (last column, middle row in Figure 1).
This article puts into perspective the two mainsources of inaccuracies in WEC power assessment:those related to the WEC dynamical description, andthose due to the misrepresentation of the sea state inthe PM approach. Furthermore, it is shown that bothsources of error can be overcome simultaneously, bycomputing the non-linear WEC output in all individualsea states (S-NL) using the NLFD calculation method.
Two reactively controlled WEC systems, namely aflap-type WEC and a spherical heaving point absorber,are studied in two diverse locations off the Irish coast.For each WEC system, two models are built: a line-arised model, and a non-linear model which includesdevice-specific non-linear forces. Then, for each WECsystem and each location, the annual power output canbe computed in four different ways: by filling-in a PM,using either the linear WEC model (PM-L) or the non-linear WEC model (PM-NL), or by computing theWEC output in each individual spectrum, again usingeither the linear WEC model (S-L) or the non-linearWEC model (S-NL). All non-linear computations (inPM-NL and S-NL) are carried out at a modest compu-tational expense, using NLFD. In particular, S-NL isshown to be achievable at reasonable computationalcost, while being able to capture both the non-lineardevice dynamics and the complexity of real ocean wavespectral shapes.
Finally, although the wave elevation data itself wereavailable for this specific study, the power assessmentmethodologies considered are all based on a spectraldescription of the sea states. Indeed, except for thestrongest storms and for shallow water, the Gaussianmodel of ocean waves is accurate,23 and can then realis-tically describe the wave excitation when WECs are in
52 Proc IMechE Part M: J Engineering for the Maritime Environment 232(1)

operation. Furthermore, long enough wave elevationrecords are only available at specific locations wheremeasurement buoys have been operating consistentlyfor several years. In contrast, spectra can not only bemeasured but also reconstructed in areas of interest bymeans of advanced meteorological models, such as inGallagher et al.24 Therefore, power assessment methodsbased on a spectral description of ocean waves aremore widely applicable.
The rest of this article is divided into five sections:The section entitled NLFD simulation introduces theNLFD technique, which is the core of the proposedpower assessment methodology. Then, WEC models,supported by material in Appendix 1, presents the twoWEC systems, with their linear and non-linear variants.Wave dataset describes the two wave datasets consid-ered in the study, and section ‘Number and length ofsimulations per sea state’ addresses the important issueof the number of simulations to carry out for each seastate. Power assessment results, using the four types ofdevice representation (PM-L, PM-NL, S-L and S-NL),are shown and compared in section ‘Numerical results’,for the two WEC systems and the two locations.Finally, the main outcomes of the study are discussedin the sections ‘Discussion’ and ‘Conclusion’.
NLFD simulation
NLFD representation of the dynamical equations
The NLFD simulation method underpins all the non-linear, numerical investigations presented in this article.It constitutes a useful way to enhance the computa-tional efficiency in the context of extensive WEC powercalculations with non-linear dynamical models.
Let us consider a WEC with 1 degree of freedom(DoF) x. A generic formulation for the dynamicalequation is
gl(x, _x, €x)� fnl(x, _x, t)+ fe(t)=0 ð1Þ
where� gl includes the inertial terms (the presence of inertial
terms in gl is the reason why the notation g is usedinstead of f), and the linearly modelled forces;
� fnl denotes forces which are modelled in a non-linear way;
� fe denotes additive excitation forces (possiblyobtained from linear wave theory).
The formulation of equation (1) applies well to non-linear extensions of the well-known Cummins equa-tion.25 Although they are not theoretically consistent,such descriptions allow for including the most signifi-cant non-linear effects, such as viscous drag, mooringline forces, non-linear Froude–Krylov forces and non-linear PTO forces, while avoiding the computational
burden of computational fluid dynamics (CFD) andthe financial cost of physical experiments.16
Typically, if hydrodynamic radiation and hydro-static restoring forces are linearly modelled, gl can beexpressed as
gl(x, _x, €x)= (m+m‘)€x+
ðt�‘
krad(t� t) _x(t)dt+khx
ð2Þ
where
� m is the WEC inertia;� kh is the hydrostatic stiffness coefficient;� The radiation forces are computed as the sum of an
inertial term m‘€z and a convolution product
between the past values of the velocity and theradiation impulse response function krad.
If some terms of gl, for example, the restoring force,are to be modelled non-linearly, they have to be movedfrom gl to fnl.
Let us consider a periodic incoming wave or excita-tion force signal, h(t) or fe(t), which can be described asa weighted sum of harmonic sinusoids, such as
h(t)’XNk=1
ahkcos(vkt)+bhksin(vkt) ð3Þ
where 8k2 1;N½ �½ �, vk= kv0, v0 =2p=T, T is the timeperiod after which h is repeated, and the componentamplitudes ak and bk are derived from the wavespectrum.
It is assumed that the motion of the WEC, subject tothe wave signal h, has a periodic steady-state solution,which can also be described through a projection ontothe same trigonometric basis so that
x(t)’mx+XNk=1
axkcos(vkt)+bxksin(vkt) ð4Þ
This way, the dynamical equation (1) can be pro-jected onto the basis of trigonometric polynomials,resulting in a non-linear vector equation
MX� F(X)� Fe =0 ð5Þ
where
� Gl(X)=MX is the matrix transcription of the lin-ear terms of gl. In particular, the linear time-domain radiation terms simplify into the frequency-dependent radiation added mass and dampingArad(v) and Brad(v). For example, when both radia-tion and hydrostatic restoring forces are linearlymodelled, 8i, j2 1, . . . ,N½ �½ �2
Merigaud and Ringwood 53

Mij =�v2
i (m+Arad(vi))+kh, i= j0, i 6¼ j
�Mi+N, j+N =Mi, j
Mi, j+N =viBrad(vi), i= j0, i 6¼ j
�Mi+N, j = �Mi, j+N
and M2N+1, 2N+1 = kh
ð6Þ
� F(X) is the projection, similar to equation (3), of thenon-linear forces fnl onto the harmonic basis so that8i2 1, . . . ,N½ �½ �
Fi(X)=2
T
ðT0
fnl(xX, _xX, t)cos(vit)dt
Fi+N(X)=2
T
ðT0
fnl(xX, _xX, t)sin(vit)dt
ð7Þ
where the subscript X indicates that the time-domainperiodic trajectory x depends on the set of coefficientscontained in X;
� Fe represents the projection of additive force terms.For example, Fe can correspond to the linear excita-tion forces resulting from the wave signal h.
Solution method
Defining H(X) : =MX� F(X)� Fe, equation (5) is anon-linear vector equation which can be expressed as
H(X)=0 ð8Þ
The Jacobian of H can be computed, which makes itpossible to use Newton’s algorithm to solve forH(X)=0. The Newton procedure is iterated untilk H(X)k2 is smaller than some given threshold n. Thecomputation of the Jacobian of the non-linear term,F(X), at each iteration, necessitates 2N fast Fouriertransforms (FFTs). Details of the solution method andthe gradient computation can be found in Spanoset al.21 Further discussion about the NLFD method, inparticular in terms of a comparison with time-domainresults and computational performance, can be foundin Merigaud and Ringwood.22
As already stressed in the section ‘Introduction’, ithas to be noted that NLFD is not an approximation ofthe results obtained with time-domain integration. Onthe contrary, results presented in Merigaud andRingwood22 tend to show that time-domain resultsobtained from RK2 integration get closer and closer toNLFD results when the integration step goes to zero.
Finally, it is important to keep in mind that the cal-culation of the non-linear forces equation (7) and theirgradient, at each iteration of Newton’s method, impliesthat the non-linear forces can be expressed as analyticaland differentiable functions of x.
WEC models
Here, two generic WEC systems are considered: a flap-type oscillating wave-surge converter and a sphericalheaving point absorber. Two mathematical model typesare used to describe each system: a linear one, and anon-linear one, which includes more realistic dynamicaleffects.
The difference between results of the linear and non-linear models represents the error encountered whenexcessively simplifying the WEC description.
Flap-type WEC
The first device considered is a flap-type WEC, forwhich the radiation, hydrostatic restoring force andexcitation forces are modelled linearly. The flap is sub-ject to a quadratic viscous drag term with moment
fv( _x)= � Cv _xj _xj ð9Þ
where x denotes the angular displacement of the flap,and Cv is given, as in Bacelli,26 by
Cv =1
8rCdLH
4 ð10Þ
where H and L are the vertical and horizontal dimen-sions of the flap, r is the density of sea water andCd =1:9 is the drag coefficient of a plate orthogonal tothe flow.
The linear frequency-domain hydrodynamic coeffi-cients are computed using the hydrodynamic softwareNEMOH.2
In the linear version of the flap WEC system, thequadratic viscous damping term is simply omitted. Alinear approximation for the viscous damping termwould necessitate, for each simulation, the use of aniterative linearisation procedure, referred to as spectraldomain method in Folley.16
The PTO force consists of two terms. The first oneis a linear damping term �BPTO _x, and the second oneis a restoring term �KPTO _x, which, similarly to reactivecontrol, allows the device to resonate in the incidentwaves. KPTO and BPTO are optimised for every Hm0
, Tp
pair in the operational space (i.e. each cell of the PM),assuming a JONSWAP spectrum with g =3:3, result-ing in a two-dimensional (2D) look-up table. The opti-misation is carried out based on the linear model, bysimply evaluating a range of discrete KPTO,BPTO pairs.For each spectrum of the datasets, the Hm0
, Tp pair ofthe spectrum is matched, using interpolation, with thecorresponding KPTO, BPTO pair in the look-up table.
The parameter settings which resulted in (linear) WECangular position exceeding 45� were discarded so that insome cases the ‘best’ parameters are sub-optimal fromthe point of view of power production, but enable thedevice to remain within meaningful physical constraints.
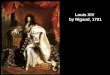
Finally, the linear and non-linear PMs for the flap,over its operational range (Hm0
44m), are shown inFigure 2. Significant differences can be observed
54 Proc IMechE Part M: J Engineering for the Maritime Environment 232(1)

between the PMs of the two models because the viscousdrag term plays a significant role, especially in the mostenergetic sea states, where typical angular velocities arelarger.
Spherical heaving point absorber
The secondWEC considered is a spherical heaving pointabsorber, with a 5-m diameter. The motion is con-strained to heave only. The buoy density is chosen to behalf that of sea water so that, at rest, the position of thegravity centre is z=0. The radiation force fr( _z, €z) anddiffraction forces fdiff(t) are linearly modelled. The radia-tion frequency-domain coefficients Ar(v) and Br(v) arecomputed using the hydrodynamic software NEMOH(https://lheea.ec-nantes.fr/doku.php/emo/nemoh/start),as well as the diffraction transfer function.
The Froude–Krylov force, which is the sum of thestatic pressure force and the incident dynamic pressureforce, is modelled non-linearly, taking into account theposition of the device with respect to the free surface.The hydrodynamic model is then similar to the onedeveloped in Gilloteaux,27 and used in Merigaudet al.28 and Penalba Retes et al.18 There are, however,three significant differences with respect to theapproaches used in Penalba Retes et al.,18 Gilloteaux27
and Merigaud et al.:28
� The dynamic pressure field is modified following aWheeler et al.29 stretching approach so that the
total incident pressure, measured at the free sur-face, is exactly zero.
� The sphere is considered to be significantly smallerthan the typical wave length so that, over the spherewetted surface, the pressure field dependence on thehorizontal coordinates is omitted. Furthermore, itis considered that the intersection between thedevice and the free surface is always on a horizontalplane, considering that h is everywhere equal to itsvalue at the origin of the horizontal plane.
� The integration of the pressure over the instanta-neous wetted surface is carried out analytically, asin Giorgi and Ringwood.30
The implementation, within NLFD, of the hydrody-namic model briefly described in this section, requires fur-ther steps, which are described in detail in Appendix 1.
The heaving sphere device is also subject to a quadraticviscous drag force, which depends on the relative velocityof the device with respect to the free surface, as follows
fv( _z� _h)= � Cv( _z� _h)j _z� _hj ð11Þ
The control force, similarly to the flap-type WEC,consists of two terms, a linear damping term � BPTO _z,and a restoring term �KPTO _z where KPTO is a ‘negativestiffness’ coefficient. Schematically, the role of therestoring term in the control force is to partly compen-sate for the natural hydrodynamic stiffness of thedevice so that the resonant frequency is brought closerto the peak wave period. However, since the Froude–
Figure 2. Linear (top) and non-linear (bottom) power matrices for the flap-type WEC (W).
Merigaud and Ringwood 55

Krylov forces are non-linearly modelled, the restoringterm of the control is adapted, as in Merigaud andRingwood,22 by introducing a saturation, in a formconsistent with non-linear hydrostatic restoring forcesfor a spherical buoy, as illustrated in Figure 3. Themodified control restoring term is given as
f�PTOres
(z)=
KPTO
R2
1
3z3 � R2z
� �z2½�R;R�
� 2
3KPTOR z5R
2
3KPTOR z4� R
8>>>>><>>>>>:
ð12Þ
In this way, the desired stiffness properties aroundthe average device position are well preserved, and thenon-linear modification avoids the occurrence ofunstable motions.22
In the linear version of the sphere model, no viscousdrag is included, and all the hydrodynamic forces aremodelled linearly, through a linear hydrostatic restor-ing force, a linear excitation force and linear radiationforces. Accordingly, the PTO restoring force is keptlinear.
Similar to the flap case, KPTO and BPTO are opti-mised for each Hm0
, Tp couple, based on the lineardevice model. Again, the optimisation is simply carriedout through an exhaustive search approach, by asses-sing a whole range of parameter settings until the bestcombination is found.
The parameter settings which resulted in (linear)WEC motions exceeding the device dimensions werediscarded so that in some cases the ‘best’ parametersare sub-optimal from the point of view of power pro-duction, but enable the device to remain within mean-ingful physical constraints.
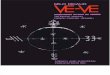
The non-linear effects, due both to the device geo-metry and to the viscous drag term, are amplifiedunder the effect of reactive control. Therefore, thenon-linear device dynamics significantly affect the
WEC trajectory, resulting in the power output to besignificantly smaller than what was expected from thelinear model.
The adverse effect of the non-linear dynamics onpower production is visible in Figure 4, by looking atthe differences between the linear and non-linear PMs.
Wave dataset
Wave data processing
The WECs are studied in two locations, subject to sig-nificantly different wave conditions. It is essential tochoose locations where full-wave spectra can be derived,without further assumptions about the spectral shape.The Irish Marine Institute has wave elevation measure-ment buoys operating at several locations off the coastof Ireland. Two of those locations were considered forthis study: Belmullet, off County Mayo and GalwayBay. For each location, the Marine Institute kindlyprovided 1 year of wave data (http://www.marine.ie/Home/site-area/data-services/real-time-observations/wave-buoys Belmullet buoy: Wave DataWell WaveRider ‘Berth B’, Lat. 54.2339, Long. 210.1429, year2010; Galway Bay buoy: DataWell Wave Rider, Lat.53.2308, Long. 29.2609, year from March 2012 toFebruary 2013).
Although the buoys record many variables, for thepurpose of this study, only free-surface elevation datawere used, and processed in order to obtain 3-h spectra.Wave elevation data are organised into files corre-sponding to 30min of wave elevation recorded at a rateof 1.28Hz. Unfortunately, for both locations, there is asignificant proportion of missing data, roughly 30–40%, corresponding to times where the buoys were notoperating properly. Therefore, not all the seasonalvariability of the meteorological conditions can bereflected in the data included in this study, and thus noseasonal analysis can be carried out.
Each 30-min wave elevation data file is processed, soas to obtain a 30-min wave spectrum estimate, in sev-eral steps:
� The 30min of data are split into overlapping 3-minsegments;
� In each segment, the signal is windowed through atapered cosine function (or Tukey window);31
� The spectral density function (SDF) is estimated foreach segment, by means of an FFT;
� Finally, the SDF estimates in all segments are aver-aged to obtain the 30-min SDF.
A few remarks are appropriate. First, the number offrequencies in the SDF is determined by the character-istics of the individual data segments. In particular, thecut-off frequency is determined as fmax=(1=2Dt)= (1=2)fs =0:64Hz, and the frequency step is equal toDf =(1=T)=0:0056Hz, where T is the duration ofindividual data segments. Second, it was found that the
Figure 3. Linear and non-linear hydrostatic restoring force andPTO restoring force models.
56 Proc IMechE Part M: J Engineering for the Maritime Environment 232(1)

methodology and settings used here to produce half-hourly spectra are very similar to those used within theWaveRider measurement buoys themselves, forthe same purpose (http://www.datawell.nl/Support/Documentation/Manuals.aspx). Finally, when wavedata were processed, measurement outliers can be eas-ily detected: for example, a few consecutive measure-ments indicating a zero free-surface elevation clearlyindicate that the buoy is not correctly operating.Similarly, a sudden ‘jump’ of several meters in an oth-erwise calm sea cannot be realistic. Such outliers alwaysresult in a significant pollution of the spectral estimate.Therefore, and since they only represented a smallamount of the data, the polluted 30-min records weresimply discarded from the analysis. For Belmullet,there were practically no outliers. For Galway bay,they represented less than 2% of the 30-min spectra.
Further to the processing of the individual 30-minrecord, the time resolution of the power assessmentmethodology was chosen as 3 h. Indeed, too short aduration (e.g. 30min) means that individual spectracapture a lot of the inherent randomness of Gaussianseas, in addition to the meteorological variability.
Conversely, too long durations (e.g. 12 h) imply thatwave records, corresponding to possibly significantlydifferent meteorological conditions, are averagedtogether into the same spectrum; in other words, thevariability due to changes in meteorological conditionsis not properly captured. For more details about therandomness of Gaussian seas, see for example.32 Eventhough there exists no perfect method to separate theeffect of meteorological changes from the randomvariability of Gaussian seas (at ‘constant’ meteorologi-cal conditions), a 3-h duration is deemed to be anappropriate compromise, and is used in other studies,for example, De Andres et al.2
As a result, every group of six consecutive 30-minspectra is averaged, to provide 3-h SDF estimates.Whenever one of the six spectra is missing, only theothers are taken into account in the average.
Overall, although there should, in theory, be 2920 3-h spectra in each year, the total number of spectra inwhich the WECs are simulated is significantly smaller(Table 1). The main reason, by far, is missing data (theequivalent of several months in both locations).However, the number of 30-min segments discarded
Figure 4. Linear (top) and non-linear (bottom) power matrices for the spherical WEC (W).
Table 1. Number of spectra in Belmullet and Galway Bay.
Number of 3-h spectra Belmullet Galway Bay
Within a year 2920 2920After removing missing data and outliers 1721 2046Total within operational range (Hm0
44 m) 1568 2046
Merigaud and Ringwood 57

because of the presence of outliers in the wave time-series had a negligible impact on the number of 3-hspectra. Finally, the operational space of the twodevices is limited to Hm0
44m, resulting in the discard-ing of a few additional spectra for the Belmulletlocation.
Comparison of the wave data in the two locations
The two chosen locations were considered for severalreasons: first, measurement data are available (as statedearlier in wave data processing). Second, both locationsare WEC test sites (for one-fourth scale devices inGalway bay, and for full-scale devices in Belmullet). Inaddition, the location in Galway Bay, sheltered by theAran Islands, does not only result in wave spectrabeing less energetic than those recorded off Belmullet,but also affects typical spectral shapes. Therefore,although only considering two sites, a significant diver-sity of wave conditions can be observed. For a moredetailed study of the wave conditions in Galway bay,see, for example, Barrett.33
The typical differences between the spectra recordedin Belmullet, and those recorded in Galway bay, areillustrated in Figures 5 and 6. Each dot on the scatterplots corresponds to a 3-h spectrum. For each sea state,characterised by the spectrum S(f), three different para-meters are annotated:
� The significant wave height, here defined asHm0
=4ffiffiffiffiffiffim0p
, where m0 =2t‘0S(f)df (recall that,with this definition, Hm0
generally differs fromH33%, which is the average height of the 33% high-est waves. Hm0
and H33% coincide only in the caseof a narrowband spectrum23);
� The mean wave energy period, defined asTe =m�1=m0;
� The e0 parameter, often referred to as broadnessparameter or spectral bandwidth,2,19 computed as
e0 =ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi(m0m�2=m2
�1)� 1q
. This latter parameter is a
measure of the spectral bandwidth, which isstrongly related to wave groupiness, that is, theprobability to observe groups of consecutive wavesbigger than a given threshold. Wave groupiness isbelieved to have a strong influence on WEC powerproduction. Also note that a higher e0 value tendsto indicate a wider spreading of the spectral energycontent across frequencies. Therefore e0 has beensuggested by De Andres et al.2 and Saulnier et al.19
as an additional parameter, along with Hm0and Tp,
to characterise the sea state and the WEC outputmore accurately.
In general, it can be seen that the sea states inGalway Bay are less energetic than the sea states inBelmullet, with typical significant wave heights beingsmaller by a factor of approximately 4. Furthermore,the mean energy period is also smaller in Galway com-pared to Belmullet, by a factor of approximately 2.
The e0 parameter, however, is in general signifi-cantly bigger in Galway Bay than in Belmullet, whichcan be explained by the spectra in Galway Bay havingmore various shapes than the ones in Belmullet, duein particular to the presence of the Aran Islands.Therefore, the spectra observed in Galway Bay arenot simply a downscaled version of the Belmulletones; they are also significantly distorted with respectto standard, uni-modal spectral shapes – which gener-ally have a small e0 value.
It is also interesting to observe that there is generallyan inverse correlation between the level of energy in thesea states (here characterised by the significant waveheight) and e0. This can be explained by the fact thatfully developed sea states, which are the most energeticand are better described by means of parametric spec-tral shapes, have a small e0 value, most of the spectralenergy being strongly concentrated around the spec-trum peak frequency.
Figure 6. Scatter plot at the Galway Bay location.Figure 5. Scatter plot at the Belmullet location.
58 Proc IMechE Part M: J Engineering for the Maritime Environment 232(1)

Number and length of simulations per seastate
Number of simulations and computationalrequirements within the NLFD framework
An important aspect of WEC power production assess-ment, neglected in most studies (with the notable excep-tion of Saulnier et al.34 and other works by the sameauthor), is the number and length of the simulations,necessary to obtain power output estimates, with adesired confidence interval.
Indeed, a finite-length realisation of a given sea spec-trum can result in power estimates which significantlydepart from the long-term average power output.Longer simulations, or equivalently a larger number ofthem, provide a more accurate power estimate, at theexpense of more computational effort. It is thereforenecessary to find the proper trade-off between the esti-mate accuracy and the corresponding computationaleffort, taking into account the specific requirements ofeach study.
In this study, the simulation method used, NLFD,has very specific implications. Due to the solutionmethod, two main parameters affect the computationaltime of one given simulation: the number of iterationsbefore convergence is achieved, and the central process-ing unit (CPU) time required by each iteration. The lat-ter, due to the computation of the gradient of the non-linear forces, depends on the size of the problem inN2ln(N), where 2NDt =T is the duration of the simu-lated, periodic signal. Therefore, while it is statisticallyequivalent to run one simulation of length T=1000 s,or to run 10 simulations of length T=100 s, the twosituations differ with respect to the computational time:if the sampling time is Dt =1s, the computational timein the first situation is proportional to 10002
ln(1000)=3ln(10) � 106 while, in the second situation,it is only proportional to 1031002ln(100)=2ln(10) � 105.
As a consequence, using NLFD makes it preferableto run many, relatively short, rather than fewer, largesimulations. However, excessively short simulationsimply that Df =1=T is not refined enough so that thefrequency content of the spectrum may be poorlyresolved.
Finally, two parameters must be set in a sensibleway: the length of each simulation, which guaranteesan accurate frequency discretisation, and the numberof simulations, which reduces the uncertainty on powerestimates.
Length of the simulations
The issue of the simulation length is investigated indetail, considering a variety of JONSWAP spectra witha range of (Hm0
, Tp) pairs spanning the operationalrange of the WECs considered. JONSWAP spectra area conservative choice, since their energy is sharply
concentrated around the peak frequency, and thereforethe sensitivity of the power estimates to the frequencydiscretisation can be expected to be stronger than inspectra with a larger bandwidth.
For each spectrum, various signal durations T areconsidered. For every T, the average power is estimatedfor both linear and non-linear WEC models (running alarge number of simulations in the latter case). Theresults of this convergence study are shown in Figure 7.
For the linear models, the sensitivity of the powerestimate to the simulation length (i.e. to the refinementof the frequency discretisation) is more pronouncedthan for the non-linear models. However, linear compu-tations being computationally cheap, a relatively longsimulation time (600 s) can be chosen. The results of thenon-linear models are less sensitive to the frequency dis-cretisation. A period of 200 s is chosen, allowing foraccurate power estimates while preserving the computa-tional benefits of the NLFD simulation method.
Methodology to determine an appropriate number ofsimulations
After choosing a given simulation length, an adequatenumber of simulations per sea state must be found. Theappropriate answer depends on the method throughwhich the wave elevation time-series are randomly gen-erated. As highlighted in Saulnier et al.34 and furtherstudied in Merigaud and Ringwood,32 there are twoharmonic superposition methods to generate random,finite-length samples from a target sea spectrum:
� In the ‘deterministic-amplitude scheme’ (DAS), aset of random phases fk is drawn, and the time-series is generated as
h(t)=XNk=1
Akcos(vkt+fk) ð13Þ
� With DAS, each generated signal contains the exactsame amount of energy, equal to m0T. This methodis not theoretically correct since it does not repro-duce the actual variability of a Gaussian processsampled over a finite duration. Nevertheless, in thecontext of WEC power calculations, the small var-iance of the average power, from one simulation tothe next, allows for using relatively few simulationsto obtain an accurate estimate for the long-termaverage power. However, the fact that DAS departsfrom the theoretical statistical properties of actualGaussian seas may introduce a bias in non-linearpower computation results32,34 although it does notseem to be the case for the non-linear WEC modelstudied in Saulnier et al.34 Therefore, preliminarytests should be carried out, prior to choosing DAS,to ensure that the resulting power estimates are notsignificantly biased.
Merigaud and Ringwood 59

� The ‘random-amplitude scheme’ (RAS) is the theo-retically consistent simulation scheme.35 The for-mulation is similar to equation (13), except that theAk coefficients, instead of being deterministic, arerandomly generated following a Rayleigh distribu-tion with variance 2S(vk)Df. With RAS, the gener-ated signals do not all contain the same amount ofenergy, reproducing accurately the statistical prop-erties of a Gaussian sea surface elevation processrecorded over a finite duration. Although RAS isperfectly realistic, the results of individual simula-tions are significantly more variable than withDAS, thus requiring a larger number of simulationsto achieve accurate power estimates. Hence, DAS ispreferable in most cases, provided that DAS resultsare not biased. Nevertheless, in other applicationssuch as extreme design loads, a proper stochasticrepresentation (RAS) is essential.
A preliminary study was carried out in order todetermine what time-series generation method was pre-ferable, and how many simulations were necessary to
achieve accurate estimates of the average power fromeach spectrum. The methodology retained is to makedecisions in a conservative manner, based on an ‘unfa-vourable’ spectrum with respect to the accuracy ofpower estimates, that is, a spectrum for which the sig-nal energy varies a lot from one simulation to another.
For a wave spectrum S(f), and for signals with dura-tion T longer than a few tens of seconds, the averagepower of the wave signal, estimated over T, has a var-iance approximately equal34 to
s2½m0�=1
T
ð‘0
S( f )2df ð14Þ
In addition, it can be assumed that more variance inthe energy content of the generated wave signals (larges2½m0�) implies more variance in the WEC power out-put estimate (large s2½P�), which can be justified in asimple manner: indeed, a more or less energetic wavesignal is likely to result in a similarly higher or lowerWEC power output. Therefore, for a given spectrum
Figure 7. Convergence studies to determine appropriate simulation lengths, for JONSWAP spectra with various (Hm0, Tp) values.
60 Proc IMechE Part M: J Engineering for the Maritime Environment 232(1)

S( f ), if the energy content of generated free-surface sig-nals presents a large variability from one simulation toanother, so will the WEC power output.
Given equation (14), the spectra which present thehighest s2½m0� are both the most energetic, andamongst them, the ones whose energy content issharply concentrated around a peak frequency.Energetic sea states with a sharply concentrated energycontent are fully developed ones, and are well describedby means of standard parametric spectral shapes.Therefore, choosing a JONSWAP spectrum with a highHm0
value guarantees that s2½m0� is high. Finally, it is
found that, for the same Hm0, JONSWAP spectra with
higher Te values have a larger s2½m0�. Based on thosesimple qualitative arguments, and given the operationalspace considered in this study (Figures 5 and 6), aJONSWAP spectrum with Tp =12 s and Hm0
=4m isbelieved to represent an appropriate spectrum for thepreliminary study.
For the chosen JONSWAP spectrum, 1000 simula-tions of duration T=200 s were run for the non-linearflap-type WEC and for the non-linear spherical heavingpoint absorber, both with RAS and DAS. In each case,the average power value and the variance of the power
Figure 8. Flap, Belmullet.
Table 2. Mean and variance of power estimates, and 95% confidence interval (in % of the mean) for N = 10 and N = 50 simulations of200 s.
Flap Sphere
DAS RAS DAS RAS
m½P� 1.73 3 106 1.71 3 106 5.43 3 104 5.40 3 104
s2½P� 2.82 3 109 2.19 3 1011 9.7 3 105 1.45 3 108
95% CI (N = 10) m62:2% m619% m61:3% m615%95% CI (N = 50) m60:9% m67:8% m60:5% m66:3%
DAS: deterministic-amplitude scheme; RAS: random-amplitude scheme.
Merigaud and Ringwood 61

estimate were evaluated, as shown in Table 2. Usingbasic statistical results, one can infer the half-width ofthe 95% confidence interval for various numbers ofsimulation runs. In Table 2, the 95% confidence inter-val is shown as a percentage of the average, for N=10and N=50. Since DAS does not seem to introduce anysignificant bias, it is found preferable to generate thetime-series using DAS rather than RAS. With DAS,choosing N=10 provides estimates with sufficientaccuracy (for both devices, the half-width of the 95%confidence interval is smaller than 2.5%). In contrast,although using RAS is theoretically more realistic, it
would require a large number of simulations to obtainaccurate power estimates.
Finally, note that the above considerations, concern-ing the ideal number of simulations, are only relevantto the simulation of non-linear WEC models. Indeed,as shown in Merigaud and Ringwood,32 DAS, appliedfor the simulation of a linear WEC model, alwaysresults in the same power value, which is the long-termaverage. Therefore, just one single DAS simulation isnecessary to estimate the long-term average power fora linear WEC model.
Numerical results
Numerical performance
For each of the two sites and two WEC systems consid-ered, power production assessment is carried out in fourdifferent ways: PM-L, PM-NL, S-L and S-NL. All thenon-linear computations, that is, to fill-in the non-linearPMs, and to compute the power output in every indi-vidual sea state with the non-linear models, are carriedout using the NLFD method.
For each location, the number of 3-h spectra is ofthe order of 2000. The PM-L and PM-NL approachesonly necessitate interpolation of each Hm0
, Tp couple
Figure 9. Flap, Galway Bay.
Table 3. Numerical performance of non-linear powerassessment (S-NL).
Flap Sphere
Nb of spectrum per loc. ~2000 ~2000Nb of sim. per loc. ~20,000 ~20,000tCPU/sim. (NLFD) ~0.006 s ~0.09 stCPU/loc. (NLFD) ~2 min ~3 mintCPU/sim. (RK2) ~2.4 s ~2.4 sEstimated tCPU/loc. (RK2) ~13h00 ~13h00
CPU: central processing unit; NLFD: non-linear frequency-domain; RK2:
second-order Runge–Kutta.
62 Proc IMechE Part M: J Engineering for the Maritime Environment 232(1)

in the linear and non-linear PMs, respectively, while forthe S-L approach, the average power output is deter-mined using only one single realisation of the sea state.Therefore, none of the three methods necessitates morethan a couple of seconds to cover the whole dataset ateach location (All numbers concerning the computa-tional performance are given for a 3.5GHz, 8-coreIntel� process).
For the S-NL case (Table 3), the number of 200-ssimulations run for each spectrum is 10, as deter-mined in the preliminary study detailed in section‘Number and length of simulations per sea state’. Thetotal number of NLFD simulations for each locationand WEC system is then of the order of 20,000. Forthe flap, the NLFD method takes only approximately2min to cover the whole range of simulations for eachlocation. The time necessary to carry out the 20,000simulations for the spherical point absorber is slightlyhigher, of the order of 3min, which remains relativelymodest.
The reason why the NLFD simulations are slowerfor the sphere than for the flap is that, in the spherecase, more iterations are needed for the Newton methodto converge, due to more significant non-linearities.
Overall, using NLFD computations, S-NL appearsto be within easy computational reach, while overcom-ing the limitations of PM-L, PM-NL, and S-L. A fewtime-domain simulations were run for the same WECmodels, using a simple RK2 scheme with direct integra-tion of the radiation force convolution, and the timeper simulation was estimated to be higher than 2 s (foran integration time step of 0.01 s). The total time neces-sary to perform the 20,000 simulations in each sea statewould then have been at least 13h00. More efficienttime-domain simulation methods could be chosen, byresorting to a state-space approximation of the radia-tion terms.36 However, unlike NLFD, the resultingcomputational gains would be at the expense of thesolution accuracy.
Detailed results per location and WEC system
Power assessment results are detailed for each site andWEC system, in Figures 8–13. Recall that the referencepoint of comparison, to assess the accuracy of all othermethods, is the S-NL configuration, where the device ismodelled non-linearly and simulated in every individualsea state, using NLFD.
Figure 10. Sphere, Belmullet.
Merigaud and Ringwood 63

In Figures 8–11, relevant comparisons between thefour power assessment methods (PM-L, PM-NL, S-Land S-NL) are visualised by means of scatter plots, in away identical to the results presented in De Andreset al.2 Each scattered point represents one 3-h spectrum,and has horizontal and vertical coordinates represent-ing the power output computed through the two meth-ods being compared. Therefore, the distance betweeneach point and the diagonal axis represents the discre-pancy between the power output computed using thetwo different methods. Furthermore, the colour indi-cates the value of the e0 parameter of the spectrumconsidered.
By looking at the comparison between the figuresobtained through a PM, and those resulting from com-putations in actual wave spectra (scatter plots of PM-Lagainst S-L, and PM-NL against S-NL), for all devicesand locations, it can be seen that the error due to thePM representation is significant for both devices andlocations, and tends to be larger for wave spectra hav-ing a larger e0 parameter. Such a correlation betweenthe e0 parameter and the error resulting from the PMapproximation is consistent with the results shown inDe Andres et al.2 Since the range of e0 values is much
more restricted in Belmullet, the effect of the spectralshape is proportionally more visible in Galway Bay, ascan be seen by considering the ‘PM-NL’ error bars inFigure 13.
Interestingly, in Figures 8–11, the top and bottomplots look relatively similar to each other, which impliesthat the errors due to the use of a PM are similar,whether the device is linearly or non-linearly modelled.The same goes for the left- and right-hand side plots,suggesting that the errors due to linear WEC modellingremain similar, whether the WEC power output is com-puted through a PM or using actual spectra. In each ofthe four figures, the central graph illustrates the overallerrors, encountered using a linear approximation of theWEC dynamics, and an excessively simplified sea-staterepresentation through a PM.
For the flap, in Belmullet (Figure 8), the errors dueto the use of a PM are significant, resulting in overesti-mating the average annual power by more than 20%(Figures 12 and 13). The errors due to the linear devicemodelling are, however, of an even larger order of mag-nitude, and are increasingly significant in more ener-getic sea states (PM-L/PM-NL and S-L/S-NLcomparisons on Figure 8) where viscous effects are
Figure 11. Sphere, Galway Bay.
64 Proc IMechE Part M: J Engineering for the Maritime Environment 232(1)

amplified. The resulting average power overestimationis of approximately 60%.
In Galway Bay, where the sea states are less ener-getic, the effect of viscous drag is less significant, result-ing in linear results matching the non-linear withreasonable accuracy (Figures 9, 12 and 13). In con-trast, the effect of describing the flap device by meansof a PM, whether it be linearly or non-linearly evalu-ated, has a clearly visible impact on power assess-ment, both on a sea state by sea-state basis (Figure 9)and on an annual basis (approximately 35% overesti-mation of the average annual power, as shown inFigures 12 and 13).
For the spherical point absorber, in Belmullet, it canbe seen in Figures 10, 12 and 13 that the errors, due toa linear approximation of the device dynamics, areapproximately five times larger (’35%) than thosecommitted using a PM instead of computing the WECoutput in actual sea states (’7%).
In Galway Bay, the two error sources are of a similarorder of magnitude: PM-NL results in overestimating theannual power output by 25%–30%, while S-L yields anoverestimation in the order of 45%. The error encoun-tered by accumulating the two sources of errors, that is,with PM-L, is more than the sum of the errors resultingfrom the two approximations considered separately.
The reason why the discrepancies, between the linearand non-linear model results, are so significant for bothdevices is that the reactive control strategy enables theWECs to resonate in all sea states, including those thatare less energetic, thus magnifying the non-linearitiesdue to the device geometry or to quadratic viscous drag.The latter is particularly significant for the flap in theBelmullet location.
The control strategy may also heighten the errorsdue to the use of a PM, especially in Galway Bay.Indeed, with the PTO stiffness term, the devices bothbecome of a resonant type, particularly sensitive toexcitation forces around a design frequency. The PTOparameters are optimised, assuming a JONSWAP spec-tral shape – for which the energy is sharply concen-trated around the peak frequency – while actual spectrain Galway Bay present a much larger spread of waveenergy across frequencies. Therefore, the power outputis significantly smaller in actual wave spectra thanassuming a standard JONSWAP spectrum.
Finally, in order to ensure that the conclusions ofthis study are not specific to the chosen control method,power production assessment was also carried out forthe same two devices and locations, this time using asimple passive linear damper, optimised for everyHm0
, Tp condition. Only the error in terms of annual
Figure 12. Annual power production for the different WECs, locations, and WEC representations.
Merigaud and Ringwood 65

average power is shown in Figure 14. It can be observedthat although the two types of errors are significantlysmaller than in the case with reactive control, both canbe significant. The errors due to the PM representationare larger in Galway Bay (approximately 20%) than inBelmullet (approximately 7%). In contrast, the errorsdue to the inaccurate description of the WEC dynamicsare more important in Belmullet than in Galway Bay,due to the occurrence of more energetic sea states.
Discussion and conclusion
Number and length of simulations
The issue of the number and length of simulations persea state deserves to be seriously addressed in everypower production assessment study. RAS simulationsare theoretically correct, since they exhibit the actualproperties of a finite-length realisation of a Gaussianprocess. However, using RAS simulations can result ina large variance of the power estimates, thus requiringan accordingly large number of simulations to obtainan estimate with acceptable accuracy. DAS, in contrast,results in a significantly smaller variance of the power
estimates. Therefore, although DAS is not theoreticallyconsistent with Gaussian process theory, the methodcan be useful to obtain power estimates within a rea-sonable number of simulations. Nevertheless, it has tobe ensured that DAS does not produce a biased powerestimate.
As a consequence, it is recommended that a prelimi-nary study is systematically carried out based, forexample, on a JONSWAP spectrum S�( f ) with highHm0
and Tp values, which constitutes an unfavourablecase from the point of view of the power estimate var-iance. The output of such a preliminary study couldconsist of:
� A choice of method (RAS or DAS), DAS being jus-tified only if it does not seem to introduce any sig-nificant bias;
� A number of simulations – for a fixed simulationlength;
� For the chosen number of simulations, a conserva-tive estimate of the uncertainty on power calcula-tions, for example the half-width of the 95%confidence interval – obtained with the spectrumS�( f ).
Figure 13. Relative error in annual power production (with respect to S-NL results).
66 Proc IMechE Part M: J Engineering for the Maritime Environment 232(1)

The PM and power assessment errors
Even with only two WECs and two locations, a widerange of scenarios in terms of power production assess-ment can be considered.
For some locations and WEC types, PM may resultin a relatively good approximation of power produc-tion, for example in the Belmullet location for the con-trolled sphere. However, that is not true anymore forlocations where spectra depart significantly from stan-dard spectral shapes, in which case a more refinedapproach, such as simulation in every individual spec-trum, is necessary.
Consistent with the results of De Andres et al.,2 alarger spectral spreading often implies a larger errordue to the PM approach. Nevertheless, even in loca-tions where spectra have a limited spreading, the errorscan be significant.
For resonant-type devices, which deliver better outputwhen wave energy is sharply concentrated around a spe-cific frequency, the errors related to the PM can be par-ticularly large, resulting in a significantly overestimatedpower assessment, both in individual sea states and on anannual basis. As a consequence, the presence of reactivecontrol, which tends to make the device resonant, height-ens the errors induced by the PM representation.
However, even for devices which are not controlled,in locations with relatively low energy and large e0
values, the approximation due to the PM can becomethe most significant source of error (such as the twouncontrolled device in Galway Bay).
Regardless of the wave spectral shape, describingnon-linear system dynamics accurately is essential forpower assessment. Non-linear effects become particu-larly significant in energetic sea states, or when thedevice undergoes large amplitude motion under theeffect of power-maximising control.
In the cases presented in this study, both the linearWEC dynamical representation and the sea-state descrip-tion through a PM tend to yield an overestimation of theWEC output, compared to more realistic calculations.Therefore, the errors due to the two approximations sum,and result in even larger errors, visible in the comparisonsbetween PM-L and S-NL. However, situations could beimagined, where the two sources of approximation offseteach other, thus minimising the overall error.
In summary, the errors encountered, using a PM rep-resentation on one hand, and describing the systemdynamics linearly on the other hand, can both be signif-icant, and of a similar order of magnitude. The presenceof control heightens all the differences observed; how-ever, both types of error remain significant in uncon-trolled conditions.
Therefore, it is essential to improve upon the PMapproach, while preserving the accuracy of the system
Figure 14. Relative error in annual power production (with respect to S-NL results), with passive linear damping.
Merigaud and Ringwood 67

dynamical description, which is made possible by theexistence of appropriate simulation tools.
NLFD as a suitable tool for fast and accurate powerassessment
As stated in sections ‘Introduction’ and ‘NLFD simula-tion’, NLFD is significantly faster than RK2 time-domain integration, without resulting in any importantapproximation of the WEC dynamics.
Although other computation methods can be con-sidered, NLFD simulations, based on a well-calibratednumber of relatively short simulations for each individ-ual sea state of the dataset, can make the S-NLapproach computationally feasible, which overcomesthe drawbacks of both PM-NL and S-L in terms ofaccuracy. For velocity-dependant non-linearities, suchas quadratic viscous drag, iterative linearisation proce-dures are also interesting candidates.16,22
Alternatively to simulations in every sea state,other approaches, such as the MaxDiss selection tech-nique,2 can also help refining power estimates, withthe limitation that the resulting device representationis site-specific. Combining the MaxDiss selectiontechnique with NLFD simulations could interestinglycumulate the computational advantages of bothmethods.
Finally, let us stress that the length of the dataset(1 year) considered here, and the fact that a significantfraction of the data are missing, makes the datasetinsufficient for accurate WEC power assessment, whichwould require significantly longer periods, covering thewave resource variability on both seasonal and annualscales. However, the relative benefits of the proposedapproach, in terms of accuracy and computation time,generalise to longer datasets.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interestwith respect to the research, authorship and/or publica-tion of this article.
Funding
The author(s) disclosed receipt of the following finan-cial support for the research, authorship, and/or publi-cation of this article: This article is based upon worksupported by Science Foundation Ireland under GrantNo. 12/RC/2302 for the Marine Renewable Ireland(MaREI) centre.
References
1. Babarit A, Hals J, Muliawan M, et al. Numerical bench-
marking study of a selection of wave energy converters.
Renew Energ 2012; 41: 44–63.
2. De Andres A, Guanche R, Weber J, et al. Finding gaps
on power production assessment on WECs: wave defini-
tion analysis. Renew Energ 2015; 83: 171–187.3. Rusu L and Onea F. Assessment of the performances of
various wave energy converters along the European con-
tinental coasts. Energy 2015; 82: 889–904.4. Rusu L and Onea F. The performance of some state-of-
the-art wave energy converters in locations with the
worldwide highest wave power. Renew Sust Energ Rev
2017; 75: 1348–1362.5. Rusu E and Onea F. Estimation of the wave energy con-
version efficiency in the Atlantic Ocean close to the Eur-
opean islands. Renew Energ 2016; 85: 687–703.6. Silva D, Rusu E and Soares CG. Evaluation of various
technologies for wave energy conversion in the Portu-
guese nearshore. Energies 2013; 6(3): 1344–1364.7. Carballo R and Iglesias G. A methodology to determine
the power performance of wave energy converters at a
particular coastal location. Energ Convers Manage 2012;
61: 8–18.8. Robertson B, Hiles C, Luczko E, et al. Quantifying wave
power and wave energy converter array production
potential. Int J Mar Energ 2016; 14: 143–160.9. Carballo R, Sanchez M, Ramos V, et al. The intra-
annual variability in the performance of wave energy
converters: a comparative study in N Galicia (Spain).
Energy 2015; 82: 138–146.10. Mackay EB, Bahaj AS and Challenor PG. Uncertainty in
wave energy resource assessment. Part 2: variability and
predictability. Renew Energ 2010; 35(8): 1809–1819.11. Parkinson SC, Dragoon K, Reikard G, et al. Integrating
ocean wave energy at large-scales: a study of the US
pacific Northwest. Renew Energ 2015; 76: 551–559.12. Halamay DA, Brekken TK, Simmons A, et al. Reserve
requirement impacts of large-scale integration of wind,
solar, and ocean wave power generation. IEEE T Sustain
Energ 2011; 2(3): 321–328.13. Torsethaugen K. Bølgedata for vurdering av bølgekraft.
Technical report STF60-A90120, 1990. Trondheim: SIN-
TEF, 20 September.14. Hasselmann K, Barnett T, Bouws E, et al. Measurements
of wind-wave growth and swell decay during the Joint
North Sea Wave Project (JONSWAP). Hamburg:
Deutsches Hydrographisches Institut, 1973.15. Bretschneider C. Wave variability and wave spectra for
wind generated gravity waves. Technical report 118,
August 1959. Washington, DC: Beach Erosion Board,
US Army Corps of Engineers.16. Folley M. Numerical modelling of wave energy converters.
London: Academic Press, 2016.17. Mackay EB, Bahaj AS and Challenor PG. Uncertainty in
wave energy resource assessment. Part 1: historic data.
Renew Energ 2010; 35(8): 1792–1808.18. Penalba Retes M, Merigaud A, Gilloteaux JC, et al. Non-
linear Froude-Krylov force modelling for two heaving
wave energy point absorbers. In: Proceedings of the 11th
European wave and tidal energy conference, Nantes, 6–11
September 2015.19. Saulnier JB, Clement A, de O, Antonio F, et al. Wave
groupiness and spectral bandwidth as relevant parameters
for the performance assessment of wave energy conver-
ters. Ocean Eng 2011; 38(1): 130–147.
68 Proc IMechE Part M: J Engineering for the Maritime Environment 232(1)

20. Kerbiriou MA, Prevosto M, Maisondieu C, et al.
Influence of sea-states description on wave energy
production assessment. In: Proceedings of the 7th Eur-
opean wave and tidal energy conference, Porto, 11–13
September 2007.21. Spanos P, Di Paola M and Failla G. A Galerkin
approach for power spectrum determination of nonlinear
oscillators. Meccanica 2002; 37(1–2): 51–65.22. Merigaud A and Ringwood JV. A non-linear frequency-
domain approach for numerical simulation of wave
energy converters. IEEE T Sustain Energ. Epub ahead of
print 16 June 2017. DOI: 10.1109/TSTE.2017.2716826.23. Ochi MK. Ocean waves: the stochastic approach, vol. 6.
Cambridge: Cambridge University Press, 2005.24. Gallagher S, Tiron R, Whelan E, et al. The nearshore
wind and wave energy potential of Ireland: a high resolu-
tion assessment of availability and accessibility. Renew
Energ 2016; 88: 494–516.25. Cummins W. The impulse response function and ship
motion. Schiffstechnik 1962; 47(9): 101–109.26. Bacelli G. Optimal control of wave energy converters. PhD
Thesis, National University of Ireland, Maynooth, May-
nooth, 2014.27. Gilloteaux JC. Mouvements de grande amplitude d’un
corps flottant en fluide parfait. Application a la recupera-
tion de l’energie des vagues. PhD Thesis, Ecole Centrale
de Nantes (ECN), Universite de Nantes, Nantes, 2007.28. Merigaud A, Gilloteaux JC and Ringwood JV. A non-
linear extension for linear boundary element methods in
wave energy device modelling. In: Proceedings of the
ASME 2012 31st international conference on ocean, off-
shore and arctic engineering, Rio de Janeiro, Brazil, 1–6
July 2012, pp.615–621. New York: American Society of
Mechanical Engineers.29. Wheeler J. Methods for calculating forces produced by
irregular waves. In: Proceedings of the offshore technology
conference, Houston, TX, 18–21 May 1969.30. Giorgi G and Ringwood JV. Computationally efficient
nonlinear Froude–Krylov force calculations for heaving
axisymmetric wave energy point absorbers. J Ocean Eng
Mar Energ 2017; 3: 21–33.31. Harris FJ. On the use of windows for harmonic analysis
with the discrete Fourier transform. P IEEE 1978; 66(1):
51–83.32. Merigaud A and Ringwood JV. Free-surface time-series
generation for wave energy applications. IEEE J Oceanic
Eng. Epub ahead of print 26 April 2017. DOI: 10.1109/
JOE.2017.2691199.33. Barrett SN. Floating wave energy converters: wave mea-
surement & analysis techniques. PhD Thesis, University
College Cork, Cork, 2015.34. Saulnier JB, Ricci P, Clement A, et al. Mean power out-
put estimation of WECs in simulated sea-states. In: Pro-
ceedings of the 8th European wave and tidal energy
conference (EWTEC 2009), Uppsala, 7–10 September
2009, vol. 710.35. Tucker M, Challenor P and Carter D. Numerical simula-
tion of a random sea: a common error and its effect
upon wave group statistics. Appl Ocean Res 1984; 6(2):
118–122.36. Armesto JA, Guanche R, Del Jesus F, et al. Comparative
analysis of the methods to compute the radiation term in
Cummin’s equation. J Ocean Eng Mar Energ 2015; 1(4):
377–393.
Appendix 1
Non-linear dynamical model for the spherical heavingpoint absorber
The hydrodynamic model used for the sphere is a non-linear extension of static and dynamic Froude–Krylovforces, inspired by the approach, first developed inGilloteaux,27 later used in other studies such asMerigaud et al.28 and Penalba Retes et al.,18 and whichconsists of integrating static and incident pressureforces over the instantaneous wetted surface of thedevice.
The sphere is restricted in heave, along the axis ~uzdefined by x= y=0. As mentioned in WEC models,three main differences have to be stressed with respect to:27
� The dynamic pressure field is modified following aWheeler stretching approach29 so that the totalincident pressure, measured at the free surface, isexactly zero.
� The sphere is considered to be significantly smallerthan the typical wave length so that, over thewetted surface of the sphere, the pressure field onlydepends on depth and time. Furthermore, the inter-section between the device and the free surface isgiven in a simplified way, considering that, at agiven instant t, the undisturbed free-surface heightis uniformly equal to its value in x= y=0.
� Pressure integration over the instantaneous wettedsurface is carried out analytically, like in Giorgiand Ringwood,30 instead of the panel method ofGilloteaux.27
With the above assumptions, the approach ofGilloteaux27 can be incorporated into the NLFDframework in a computationally efficient way, asdetailed further in this section.
The static pressure force can be expressed as
ps(z)= � rgz ð15Þ
For a monochromatic wave in infinite water depth,the dynamic incident pressure is written as
pdyn(z, t,v)=<frgA(v)ejvt+k(v)zg ð16Þ
where k(v)=v2=g is the wave number, and A(v)denotes the complex wave amplitude.
With the Wheeler stretching approach, the dynamicpressure is reformulated, replacing z with z = z� h, therelative elevation with respect to the free surface
pdyn(z, t,v)=<frgA(v)ejvt+k(v)zg ð17Þ
The total incident dynamic pressure, due to thesuperposition of waves of different frequencies, is then
pdyn(z, t)= rg
ð‘0
<fA(v)ejvtgek(v)zdv ð18Þ
Merigaud and Ringwood 69

It can be seen that, taken at the free surface (z =0),the static pressure equation (15) becomes ps = � rgh,and the dynamic pressure equation (18) reduces topdyn= rgh so that the total of the incident and staticpressure is zero at the free surface.
The total force due to the static pressure over theimmersed surface Sim of the body is
~FsðtÞ ¼ �Ð
P2Sim�rgzP~ndS
¼Ð
P2SimrgzP~ndSþ
ÐP2Sim
rghðtÞ~ndS
¼ rgV imðtÞ~uz � rghðtÞSintðtÞ~uz
ð19Þ
where V im denotes the immersed volume of the body,Sint denotes the area of the intersection between thebody and the free surface (considered to be horizontal),and~uz is the unit vertical vector, pointing upwards.
For a sphere in heave with radius R and density r=2,denoting zG the position of the sphere gravity centre rel-atively to the free surface, equation (19) can be analyti-cally derived as
~Fs(zG, t)=rgp2
3R3 � R2zG+
1
3z3G � h(t)(R2 � z2G)
� �~uz
ð20Þ
The total incident pressure force over the body canbe written as
~Fdyn ¼ �Ð
P2SimpdynðzPÞ~ndS
¼ �Ð
P2Simrg
Бv¼0<fAðvÞejvtgekðvÞzdv~ndS
¼ �rgБ
v¼0<fAðvÞejvtgð
ÐP2Sim
ekðvÞz~ndSÞdv
ð21Þ
For a sphere, the integral over the immersed surfacecan be analytically derived, yieldingÐ
P2SimekðvÞz~ndS ¼ 2p½� zG
kðvÞ � 1kðvÞ2
þð RkðvÞ þ 1
kðvÞ2Þe�kðvÞRekðvÞzG �~uz
ð22Þ
Let us define, for nr�
InðtÞ ¼ 2prg
ð‘0
<fAðvÞejvtgkðvÞndv ð23Þ
and
JðzG; tÞ ¼ 2prgБ0
<fAðvÞejvtg
3 RkðvÞ þ 1
kðvÞ2
� e�kðvÞRekðvÞzGdv
ð24Þ
Thus, equation (21) can be expressed as
~Fdyn(zG, t)= ½I�1(t)zG+I�2(t)� J(zG, t)�~uz ð25Þ
At each iteration of the NLFD algorithm, asexplained in NLFD simulation, equation (7), the
computation of non-linear forces and their derivativesnecessitates an analytical expression of the forces as afunction of the system variables in the time domain.However, using expression (25) into (7) would lead to acomputationally expensive double integration over v
and t.Thus, for a computationally efficient use within the
NLFD algorithm, it is interesting to carry out a devel-opment of J(zG, t), using a polynomial expansion of theexponential term, ezG . Defining
JnðtÞ ¼2prg
n!
ð‘0
<fAðvÞejvtg
R
kðvÞ þ1
kðvÞ2
!e�kðvÞRkðvÞndv
ð26Þ
Equation (25) can be formulated as
~Fdyn(zG, t)= I�1(t)zG+I�2(t)�X‘
n=0
Jn(t)znG
" #~uz ð27Þ
so that the dynamic pressure force can be expanded toany arbitrary order nmax to reach a target degree ofaccuracy.
In this way, for a given periodic sea-state realisation(i.e. a set of complex amplitudes A(v)), the functionsI�1(t), I�2(t) and Jn(t) are computed by means of FFTsprior to the start of the NLFD iterations. Then, at eachiteration of the Newton method, the non-linear forcesand their derivatives are computed in a simple polyno-mial form. Figure 15 shows the first three terms of thesum in equation (27), taken in the limit case zG =R,for a periodic wave signal derived from a typicalJONSWAP spectrum (Hm0
=2, Tp =10). As can beseen on Figure 15, the magnitude of the functions Jn(t)decreases rapidly with the order n so that, in practice,there is no noticeable difference between the resultsobtained with nmax=2 or nmax=3. In this article,nmax=3 is chosen.
Figure 15. Terms Jn(t)znG of expansion (27), taken at zG = R, for
a typical JONSWAP spectrum (Hm0= 2 m, Tp = 10 s).
70 Proc IMechE Part M: J Engineering for the Maritime Environment 232(1)



![Power Wave S700 Product Literature - Lincoln Electric · Power Wave S700 [ 2 ] | Power Wave ... Deluxe Adjustable . Gas Regulator and Hose Kit K586-1 Power Feed](https://img.pdfslide.us/doc/110x75/5af4dadf7f8b9a9e598d4c3d/power-wave-s700-product-literature-lincoln-wave-s700-2-power-wave-deluxe.jpg)