Embed Size (px)
Citation preview

3 4o Trimestre de 2011 –
ABSTRACT
This work deals with the modeling and control of an aircraft for use in mission planning for Unmanned Aerial Vehicles (UAV). The methodology is as following: rst, a lateral-directional mode non-linear model of the chosen aircraft was obtained, and loops (stabilization, guidance and track generation) were designed to guarantee that the aircraft can follow a prescribed trajectory, which is generated appropriately to ac-complish the mission. Finally, complete mission simulations were performed using hybrid dinamical systems. In the future, these techniques could be implemented and validated on flight simulators or in experimental plataforms.
Keywords: Modeling, Control, Unmanned Aerial Vehicles, Mission Planning.
RESUMO
Este trabalho trata da modelagem e controle de uma aeronave para uso no plane-jamento de missões de veículos aéreos não-tripulados (VANT). A metodologia é a seguinte: primeiro, um modelo não-linear do modo látero-direcional da aeronave escolhida foi obtido, e as malhas (estabilização, guiamento e geração de trajetó-ria) foram projetados para garantir que a aeronave pudesse seguir uma trajetória específica, a qual é gerada adequadamente para cumprir a missão. Finalmente, simulações de missões completas foram realizadas utilizando sistemas híbridos dinâmicos. No futuro, essas técnicas poderiam ser implementados e validadas em simuladores de vôo ou em plataformas experimentais.
Palavras-chave: Modelagem, Controle, Veículos Aéreos Não-Tripulados, Pla-nejamento de Missão.
INTRODUÇÃO
Uma definição simples de planejamento de missão ´e a capacidade de ma-pear a melhor rota para o alvo com o maior nível de segurança e probabilidade de sucesso. Neste contexto, parte-se da premissa da existência de um modelo
PLANEJAMENTO E CONTROLE DE MISSÕES DE UM VANT DE ASA FIXA
Olinda de Lima Farias Alvesa e Antonio Eduardo Carrilho da Cunhab
aSeção de Armamento e Munição (SAM) Centro Tecnológico do Exército (CTEx)Av. das Américas, 28.705, Guaratiba, 23.020-470, Rio de Janeiro, RJ, Brasil.
bSeção de Engenharia Elétrica (SE/3) – Instituto Militar de Engenharia (IME) Praça General Tibúrcio, 80, Praia Vermelha, 22.290-270, Rio de Janeiro, RJ, Brasil.* [email protected]
4 – 4o Trimestre de 2011
aerodinâmico para uma aeronave de asas fixas, e desenvolve-se uma metodologia para o planejamento de missões de VANT -missões estas, que são complexas e compostas de diversas etapas.
Existem diversos trabalhos que empregam os ditos métodos formais em en-genharia para o planejamento e controle de missões de VANT. Especificamente, em Seibel et al. (1998) e Costa e Carrilho da Cunha (2008), a verificação de sis-temas híbridos (Frehse, 2005) é empregada, enquanto em Garrido e Carrilho da Cunha (2009) emprega-se a teoria de controle supervisório de Sistemas Híbridos (González et al., 2001).
A proposta deste artigo é fornecer um modelo matemático completo para o problema de pla nejamento de missões de VANT como um sistema dinâmico híbri-do (Goebel et al., 2009), com as malhas de estabilização e guiamento e algoritmos de geração de trajetórias projetadas, para o planejamento de missões segundo as abordagens de Seibel et al. (1998), Costa e Carrilho da Cunha (2008) e Garrido e Carrilho da Cunha (2009). Simulações computacionais foram utilizadas como forma de validação do modelo obtido. Um trabalho similar é Hemerly et al. (2006), onde se utiliza identificação paramétrica para o projeto das malhas de controle. Pode--se citar também Niculescu (2001), o qual apresenta leis de controle para o modo lateral sob inerência do vento (estabilização); Bélanger et al. (2008), que exibe um algoritmo de guiamento que utiliza modelos de controle preditivo e Pappas et al. (2004), que apresentam um algoritmo de geração de trajetória.
Assim, a contribuição deste artigo foi no sentido da abordagem de diferentes disciplinas que o assunto sobre aeronaves exige: modelagem, controle, planeja-mento de missões, etc. Desta forma, foi realizada uma integração entre a modela-gem e o controle em simulações de missão usando sistemas dinâmicos híbridos, e uma forma, então, de conscientizar o leitor das diversas etapas e da multidiscipli-naridade envolvidas na tarefa de planejamento e controle de missões de um VANT.
Este artigo está organizado da seguinte forma: na seção 2 é apresentada a formulação do problema, na seção 3 é descrito o modelo não-linear da aeronave e sua linearização. Na seção 4 foi especificado o controlador da malha de esta-bilização, na seção 5 foi especificado o controlador da malha de guiamento e na seção 6 foram abordados os algoritmos de geração de trajetórias retilínea e circu-lar e em seguida, na seção 7, foi gerado o sistema híbrido resultante do conjunto de trajetórias e foram realizadas simulações. Porém, na seção 8 encontram-se as conclusões deste trabalho, bem como as contribuições e propostas para trabalhos futuros.
FORMULAÇÃO DO PROBLEMASeleciona-se uma aeronave de asas fixas pois as aplicações militares reque-
rem alta velocidade a frente, grande raio operacional e baixa assinatura acústica. Além disso, os aviões podem ser projetados de forma a se comportarem de forma inerentemente estável e são, portanto, comparati vamente fáceis de pilotar a partir de uma estação de controle em terra. A aeronave escolhida foi o Cessna Skylane 182, devido à disponibilidade de uma plataforma de testes no Centro Tecnológico do Exército (CTEx) (Pereira e Neves, 2007; Jensen e Pedersen, 2005).
5 4o Trimestre de 2011 –
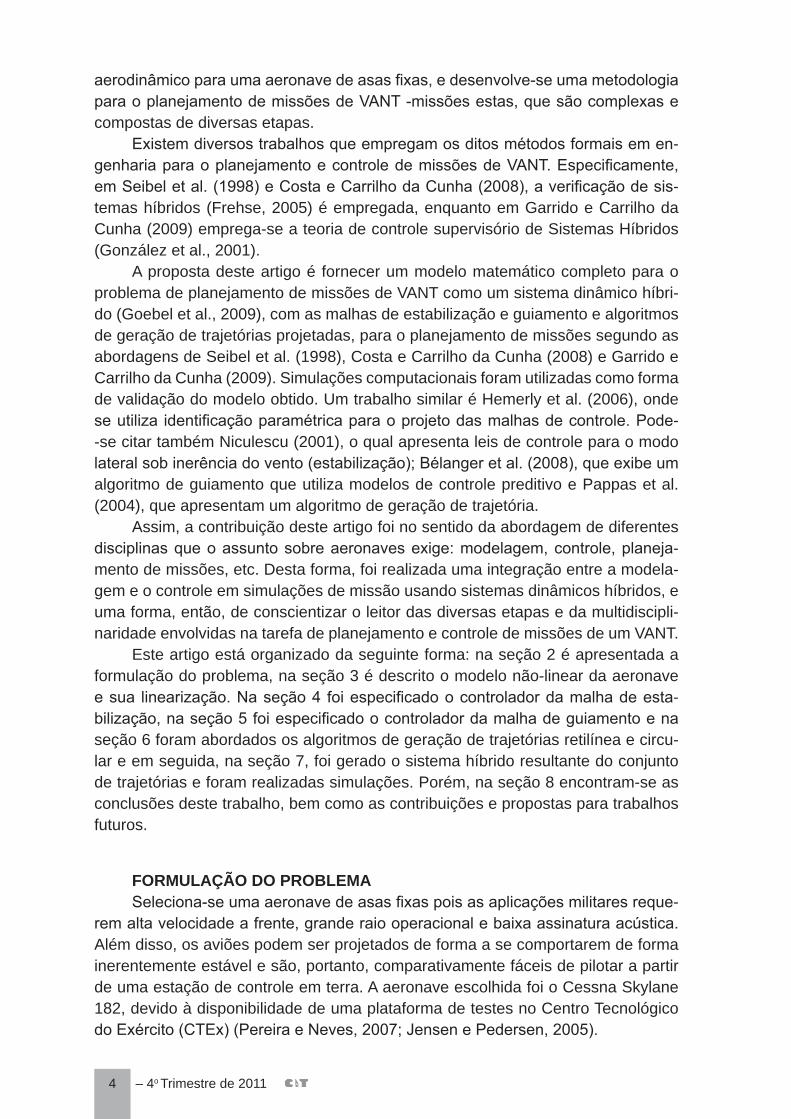
As malhas de controle interna e externa a serem utilizadas neste trabalho en-contram-se repre sentadas na Figura 1. A aeronave fornece as variáveis atualizadas aos sensores. Estas são enviadas ao bloco navegação responsável por fornecer a posição, altitude e velocidades angulares e lineares da aeronave, em relação a um sistema de coordenadas de referência. Estas informações são repassa das aos blocos guiamento, estabilização e geração de trajetória. A estabilização está relacionada à técnica de controle da atitude da aeronave em torno do seu centro de massa. O guiamento é responsável por dar o rumo da aeronave. A geração de trajetória tem a função de processar os dados produzidos pelo sistema de nave-gação e compará-los com os dados da aeronave, gerando os sinais de erros cor-respondentes e transformando-os em comandos de direção desejados. Esta malha interna realimenta a malha externa, controle da missão, responsável por gerar a trajetória a ser seguida pela aeronave.
Figura 1. Malhas de Controle.
O enfoque deste trabalho se dará no modo altero-direcional da modelagem da aeronave escolhida, sob as hipóteses de um desacoplamento instantâneo das di-nâmicas dos modos látero¬direcional e longitudinal, para pequenas perturbações, e de um efetivo controle para estabilização e guiamento longitudinal.
MODELAGEM O modelo aerodinâmico não-linear da aeronave utilizado foi extraído de Blake-
lock (1991). Versões com diferentes configurações podem ser encontradas em Nel-son (1989), Stevens e Lewis (1992) e Jensen e Pedersen (2005). Os parâmetros para a aeronave Cessna foram extraídos de Roskam (2001). Não se apresentam as equações completas do modelo neste artigo, apenas faz-se menção `as princi-pais variáveis. O modelo completo apresenta as seguintes variáveis de estado:
(1)
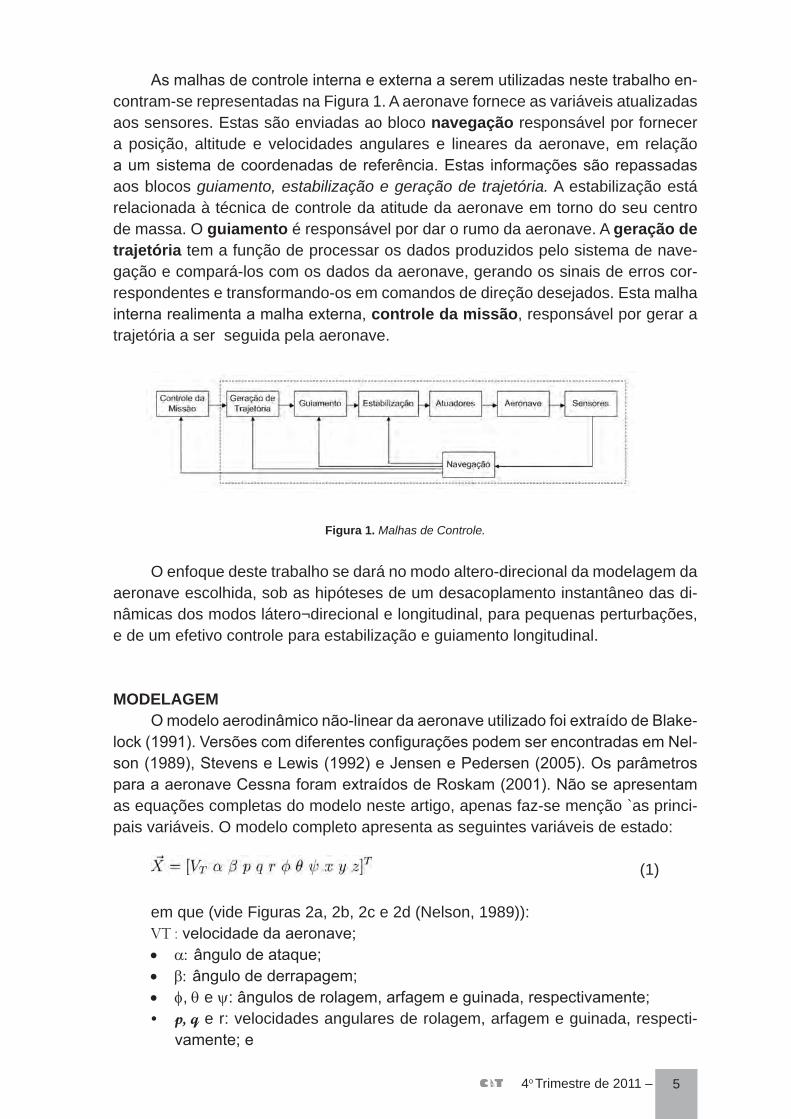
em que (vide Figuras 2a, 2b, 2c e 2d (Nelson, 1989)): VT : velocidade da aeronave; • α: ângulo de ataque; • β: ângulo de derrapagem; • φ,θ e ψ: ângulos de rolagem, arfagem e guinada, respectivamente; • p,q e r: velocidades angulares de rolagem, arfagem e guinada, respecti-
vamente; e

6 – 4o Trimestre de 2011
• x,yez: coordenadas da posição da aeronave no sistema de coordenadas de navegação (Pamadi, 1998).
As variáveis de entrada são:
(2)
em que (vide Figura 2 (Roskam, 1979):• η fração do empuxo máximo (T/TM); • δe deflexão do profundor (elevator); • δa deflexão dos ailerons e• δr deflexão do leme (rudder).
As equações dinâmicas que descrevem a aeronave precisam ser lineariza-das a fim de permitir a aplicação de determinadas técnicas de controle linear. De acordo com Stevens e Lewis (1992), equações não-lineares implícitas do modelo podem ser escritas como:
(3)
que são obtidas a partir de três equações de forças (VT ,α,β) (Stevens e Lewis, 1992), três equações de momento (p, q, r) (Stevens e Lewis, 1992) e duas equações cinemáticas (ϕ,θ) (Stevens e Lewis, 1992). As equações das coordenadas locais (x,y,z) e a equação do ângulo de guinada foram inseridas no modelo posterior-mente por intermédio de integração, pelo fato de que suas variáveis não entram na composição das demais equações diferenciais do modelo (Stevens e Lewis, 1992).
O vetor de estados reduzido correspondente àquele mostrado na EQ. 1, desprezando-se as variáveis , x, y e z. A partir da hipótese de pequenas perturba-ções na condição de estado estacionário (equilíbrio) , obtém-se um conjun-to de equações de estado lineares com coeficientes constantes. Expandem-se as equações de estado não-lineares (EQ. 3) em séries de Taylor em torno do ponto de equilíbrio e mantém-se somente os termos de primeira ordem.
7 4o Trimestre de 2011 –
Figura 2: Ângulos e Entradas da aeronave
A linearização é uma técnica de aproximação do sistema em torno de um ponto de operação. Esta só pode levar à predição do comportamento do sistema em uma vi-zinhança deste ponto. Nenhum outro comportamento não-local, muito menos o com-portamento global do sistema em todo o espaço de operação, podem ser preditos pelo modelo linearizado. Além disto, este ponto de operação deve ser um ponto de equilíbrio. De acordo com Stevens e Lewis (1992) e Nelson (1989), as condições para o estado de equilíbrio (estado estacionário) para o caso especifico de vôo reto e nivelado são:
(4)
Sendo assim, foram usadas as EQ. 3 para linearizar o siste-ma em torno do ponto de operação, utilizando as condições da EQ. 4. Primeiro foi suposto um ponto de equilíbrio em , o ângulo de tra-jetória inicial , foi considerado zero (voo plano e nivelado), sabendo-se que, de acordo com Stevens e Lewis (1992):

8 – 4o Trimestre de 2011
(5)
No programa de cálculo numérico utilizado neste trabalho os valores de e foram substituídos nas equações não-lineares e observou-se quais equações diferenciais eram não- nulas, ou seja, apareciam dependências em relação às outras variáveis, e foram encontradas quatro equações e quatro incógnitas, , em função de ,
Resolvendo este sistema foram encontrados os seguintes valores para o ponto de equilíbrio:
(6)
Assim, percebe-se que as perturbações no estado, as derivadas do estado e os vetores de entrada devem satisfazer a:
(7)
Cada termo da EQ. 7 é um produto escalar, portanto é a diferencial total de f1 devida às perturbações simultâneas em todos os elementos do vetor de estados. Estas equações podem ser escritas na forma de equações de espaço de estado lineares implí-citas da forma:
(8)
na qual, as letras minúsculas e em itálico, e representam as perturbações nos va-lores de equili±rio dos vetores de estado e de entrada. As matrizes dos coeficientes são:
(9)
9 4o Trimestre de 2011 –
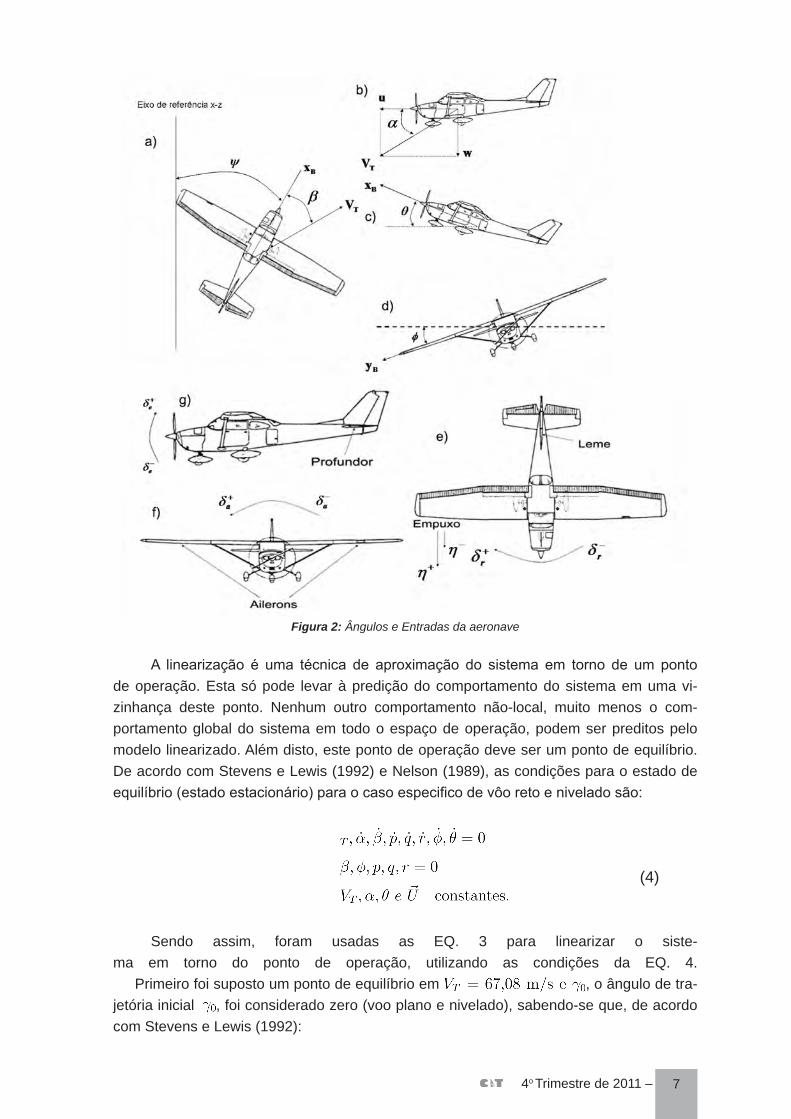
em que o subscrito indica que as matrizes são calculadas no pon-to de operação. Estas matrizes são chamadas de matrizes Jacobianas. As matrizes de espaço de estados do modelo linearizado são então:
O procedimento de linearização revela o desacoplamento instantâneo dos mo-dos longitudinal e látero-direcional para pequenas perturbações em torno do ponto de operação. Por inspeção da matriz A8 verifica-se que as variáveis relacionadas ao modo longitudinal , nas 1a, 2a 5a e 8a colunas, não fazem parte da composição das equações do modo látero-direcional , nas 3a, 4a 6a e 7a colunas, e vice-versa. Por outro lado, por inspeção da matriz B8, as variáveis do modo longitudinal são influenciadas apenas pelas entradas η e δr, enquanto as va-riáveis do modo látero-direcional são influenciadas apenas pelas entradas δa e δr.
Se, ao fato do desacoplamento instantâneo dos modos longitudinal e látero-di-recional para pequenas perturbações em torno do ponto de operação, for somada a hipótese de um efetivo controle para estabilização de cada modo, pode-se tratar o problema de controle dos dois modos separadamente. Neste trabalho então, foi tra-tado apenas o controle para estabilização e guiamento do modo látero-direcional.
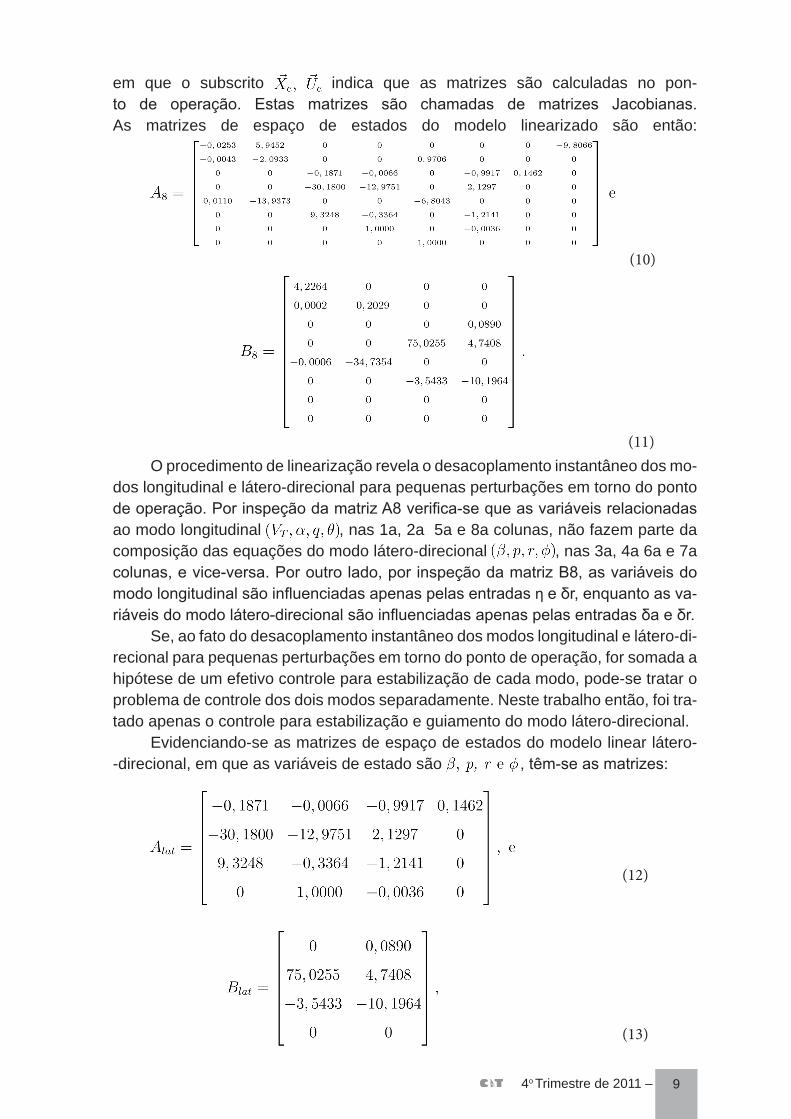
Evidenciando-se as matrizes de espaço de estados do modelo linear látero--direcional, em que as variáveis de estado são , têm-se as matrizes:
(10)
(12)
(11)
(13)
10 – 4o Trimestre de 2011
Os autovalores de Ajat são:
(14)
Analisando-se estes autovalores e comparando-os com (Nelson, 1989), observa--se que λ1 corresponde ao modo de rolamento, λ23 correspondem ao modo de rolamen-to holandês e λ4 indica o modo espiral, que caracterizam os movimentos da aeronave.
MALHA DE ESTABILIZAÇÃO
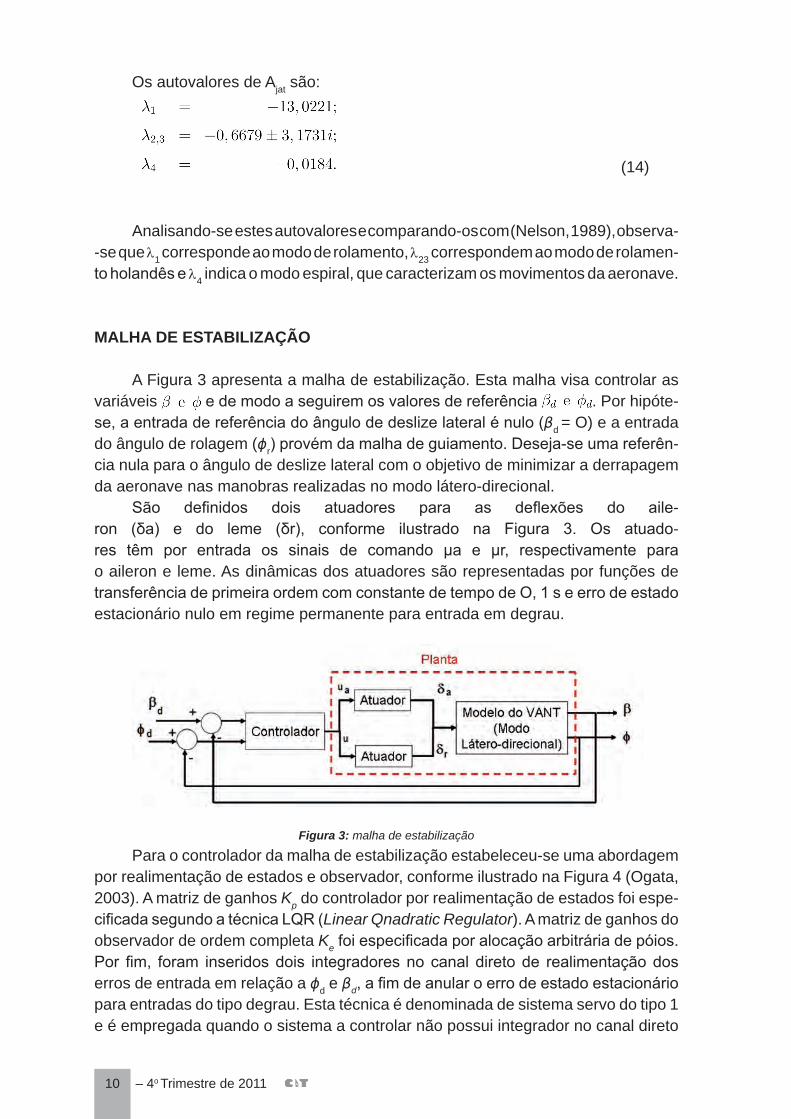
A Figura 3 apresenta a malha de estabilização. Esta malha visa controlar as variáveis e de modo a seguirem os valores de referência . Por hipóte-se, a entrada de referência do ângulo de deslize lateral é nulo (βd = O) e a entrada do ângulo de rolagem (ϕr) provém da malha de guiamento. Deseja-se uma referên-cia nula para o ângulo de deslize lateral com o objetivo de minimizar a derrapagem da aeronave nas manobras realizadas no modo látero-direcional.
São definidos dois atuadores para as deflexões do aile-ron (δa) e do leme (δr), conforme ilustrado na Figura 3. Os atuado-res têm por entrada os sinais de comando μa e μr, respectivamente para o aileron e leme. As dinâmicas dos atuadores são representadas por funções de transferência de primeira ordem com constante de tempo de O, 1 s e erro de estado estacionário nulo em regime permanente para entrada em degrau.
Figura 3: malha de estabilização
Para o controlador da malha de estabilização estabeleceu-se uma abordagem por realimentação de estados e observador, conforme ilustrado na Figura 4 (Ogata, 2003). A matriz de ganhos Kp do controlador por realimentação de estados foi espe-cificada segundo a técnica LQR (Linear Qnadratic Regulator). A matriz de ganhos do observador de ordem completa Ke foi especificada por alocação arbitrária de póios. Por fim, foram inseridos dois integradores no canal direto de realimentação dos erros de entrada em relação a ϕd e βd, a fim de anular o erro de estado estacionário para entradas do tipo degrau. Esta técnica é denominada de sistema servo do tipo 1 e é empregada quando o sistema a controlar não possui integrador no canal direto
11 4o Trimestre de 2011 –
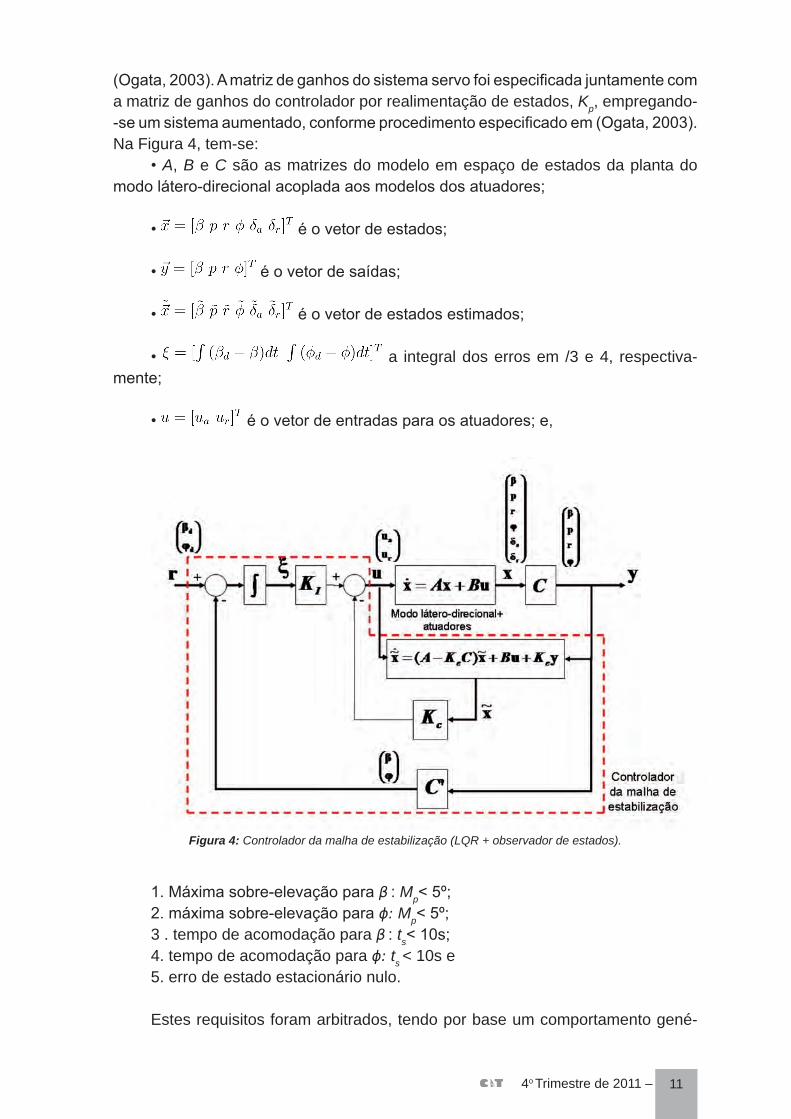
(Ogata, 2003). A matriz de ganhos do sistema servo foi especificada juntamente com a matriz de ganhos do controlador por realimentação de estados, Kp, empregando--se um sistema aumentado, conforme procedimento especificado em (Ogata, 2003). Na Figura 4, tem-se:
• A, B e C são as matrizes do modelo em espaço de estados da planta do modo látero-direcional acoplada aos modelos dos atuadores;
• é o vetor de estados;
• é o vetor de saídas;
• é o vetor de estados estimados;
• a integral dos erros em /3 e 4, respectiva-mente;
• é o vetor de entradas para os atuadores; e,
Figura 4: Controlador da malha de estabilização (LQR + observador de estados).
1. Máxima sobre-elevação para β : Mp< 5º; 2. máxima sobre-elevação para ϕ: Mp< 5º; 3 . tempo de acomodação para β : ts< 10s; 4. tempo de acomodação para ϕ: ts < 10s e5. erro de estado estacionário nulo.
Estes requisitos foram arbitrados, tendo por base um comportamento gené-

12 – 4o Trimestre de 2011
rico dos VANT. Na prática, devem ser oriundos do projeto do VANT, ou seja, do tipo de aplicação a qual este se destina. As especificações de desempenho em estabilidade podem depender, por exemplo, do tipo de carga que é utilizada, como estabilidade em apontar uma câmera para uma área etc.
Pode-se demonstrar que o par (A,B) é controlável e o par (A,C) é ob-servável (Alves, 2010), o que viabiliza a abordagem de controle adotada. As matrizes de ponderação para o cálculo das matrizes de ganho do controlador KC e do sistema servo KI foram ajustadas por tentativa e erro até que as especificações do comportamento fossem atingidas. As matrizes de ponderação encontradas foram
(15)
em que QC é a matriz de ponderação de estados, Rc é a matriz de ponde-ração de entradas e díag(λ1...;;λn) denota uma matriz diagonal com elemen-tos λ1...;;λn, na diagonal principal e com todos os outros elementos zerados. As matrizes de ganhos do controlador por realimentação de estados e do sistema servo calculadas são, respectivamente:
O esquema do observador está ilustrado na Figura 4. Observando que o pólo de maior valor absoluto do controlador LQR é -79,0803+34,8306i e que possui valor abso-luto 86, 4110. Escolheram-se então os pólos do observador em aproximadamente três vezes este pólo, isto é, em -260. Desta forma, os pólos desejados do observador foram:
(18)
Sendo assim, a alocação arbitrária de póios, obteve-se a matriz de ganhos do observador:
(19)
(16)
(17)
13 4o Trimestre de 2011 –
Para simulação do controlador, foi utilizado o modelo não-linear completo da aeronave Cessna, porém com as derivadas das variáveis do modo longitudinal
iguais a zero, tornando, desta forma, o voo somente no modo látero--direcional. Trabalha-se assim com a hipótese do desacoplamento instantâneo dos modos látero-direcional e longitudinal para pequenas perturbações somada à hipó-tese da existência de um efetivo controlador para estabilização do modo longitudinal. Para os saturadores, foram incluídos os valores encontrados no Flight Cear (Ol-son, 2010) para o aileron e para o leme, que correspondem aos valores
–15° < δa < 20° e – 16° < δr < 16°. O modelo não-linear foi então comparado com o mode-
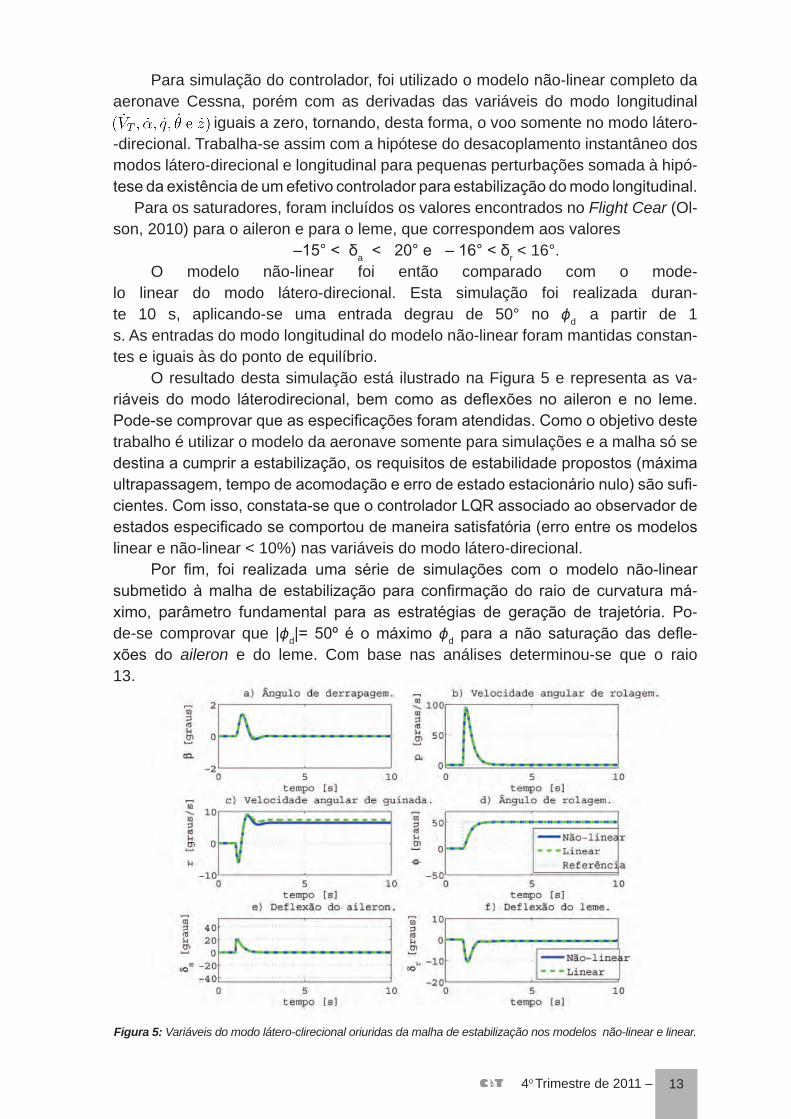
lo linear do modo látero-direcional. Esta simulação foi realizada duran-te 10 s, aplicando-se uma entrada degrau de 50° no ϕd a partir de 1 s. As entradas do modo longitudinal do modelo não-linear foram mantidas constan-tes e iguais às do ponto de equilíbrio.
O resultado desta simulação está ilustrado na Figura 5 e representa as va-riáveis do modo láterodirecional, bem como as deflexões no aileron e no leme. Pode-se comprovar que as especificações foram atendidas. Como o objetivo deste trabalho é utilizar o modelo da aeronave somente para simulações e a malha só se destina a cumprir a estabilização, os requisitos de estabilidade propostos (máxima ultrapassagem, tempo de acomodação e erro de estado estacionário nulo) são sufi-cientes. Com isso, constata-se que o controlador LQR associado ao observador de estados especificado se comportou de maneira satisfatória (erro entre os modelos linear e não-linear < 10%) nas variáveis do modo látero-direcional.
Por fim, foi realizada uma série de simulações com o modelo não-linear submetido à malha de estabilização para confirmação do raio de curvatura má-ximo, parâmetro fundamental para as estratégias de geração de trajetória. Po-de-se comprovar que |ϕd|= 50º é o máximo ϕd para a não saturação das defle-xões do aileron e do leme. Com base nas análises determinou-se que o raio 13.
Figura 5: Variáveis do modo látero-clirecional oriuridas da malha de estabilização nos modelos não-linear e linear.
14 – 4o Trimestre de 2011
máximo de curvatura (Rr) 933,56 m para |ϕd|= 50º.
GUIAMENTO
O controlador utilizado para a malha de guiarnento é um controlador do tipo proporcional (P). Este controlador foi escoffiido por ser o mais encontrado na maio-ria dos artigos e livros consultados e por ser, de certa forma, simples de ser especi-ficado. Ele transforma o erro do ângulo de guinada desejado em relação ao ângulo de guinada atual da aeronave no ângulo de rolagem a ser seguido pela aeronave.
A planta para a malha de guiamento tem como entrada o ângulo de rolagem comandado para a malha de estabilização ϕd e, como saída, o ângulo de rumo da aeronave . Pode-se observar que substituindo os valores de do ponto de equilíbrio na equação referente a , conclui-se que = , em que é a velocidade angular de guiagem, obtida como saída da malha de estabiização, vide Figura 4. A entrada de referência do ângulo de deslize lateral é mantida nula, βd = 0º.
Desta forma, a função de transferência para a malha de guiamento é obtida a partir das premissas acima é dada por:
(20)
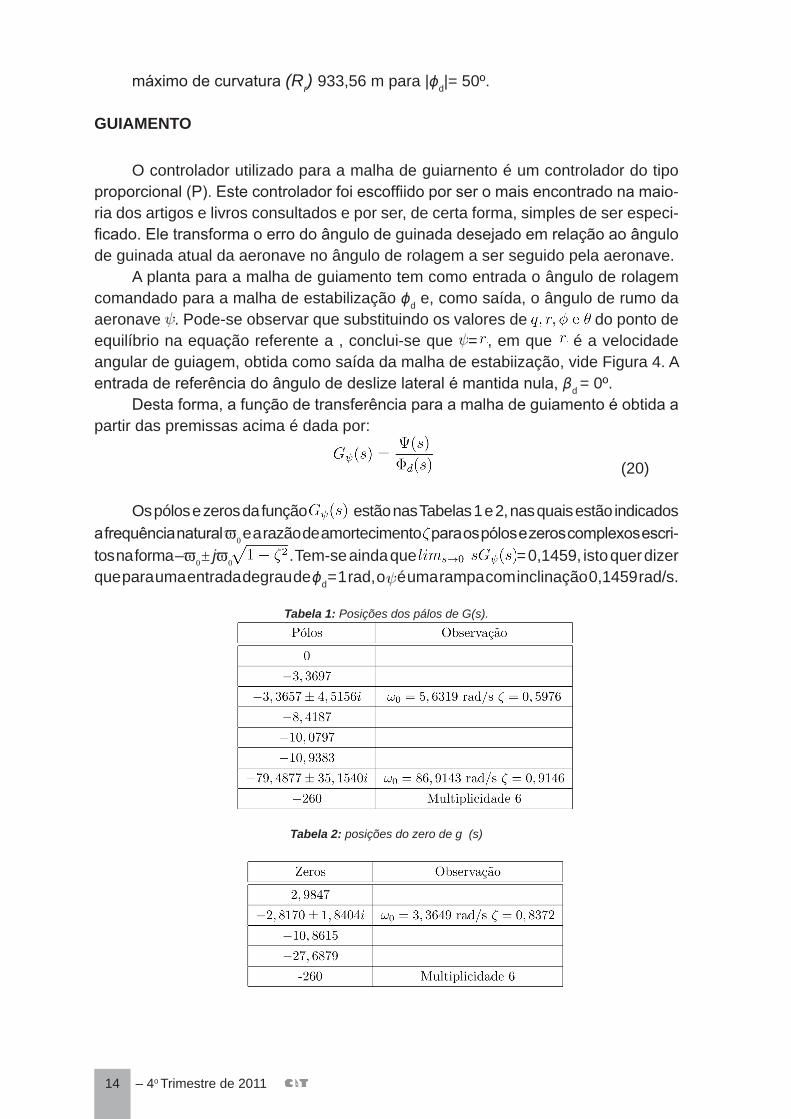
Os pólos e zeros da função estão nas Tabelas 1 e 2, nas quais estão indicados a frequência natural ϖ0 e a razão de amortecimento para os pólos e zeros complexos escri-tos na forma –ϖ0 ± jϖ0 . Tem-se ainda que = 0,1459, isto quer dizer que para uma entrada degrau de ϕd = 1 rad, o é uma rampa com inclinação 0,1459 rad/s.
Tabela 1: Posições dos pálos de G(s).
Tabela 2: posições do zero de g (s)
15 4o Trimestre de 2011 –
O controlador da malha de guiamento foi especificado por análise do lu-gar das raízes da função de transferência com entrada ϕd e saída (EQ. 20).
As especificações de desempenho do controlador da malha de guiamento são:
1. Não haver sobre-elevação em
2. Tempo de acomodação de em torno de 10 5;
3. Não saturar δa ou δr
Como visto na ϕd Seção 4, no controlador da malha de estabilização, a refe-
rência do ângulo de rolagem Çb de 50° (0, 8727 rad) é o limite aproximado para começar a saturação em e δa ou δr.
Por outro lado, a função possui um pólo na origem, sendo desnecessário um controlador integral ou derivativo. Desta forma, como o controlador proporcional (Kp) está no canal após a saída do erro do ângulo de guinada , tem-se que o valor máximo para Kp é ϕdmáx=0,8727 ou 50º.
Por tentativa e erro, chega-se então ao seguinte: fazendo Kp= 4, tem-se que o pólo dominante passa a ser s -0,986, por inspeção do lugar das raízes da função de transferência . Esse pólo corresponde a uma constante de tempo dominante
= 1,014 s e a um tempo de acomodação para a resposta ao degrau de apro-ximadamente 5 s. Por outro lado, o erro máximo em deve ser aproximadamente 12,5° para este Kp .
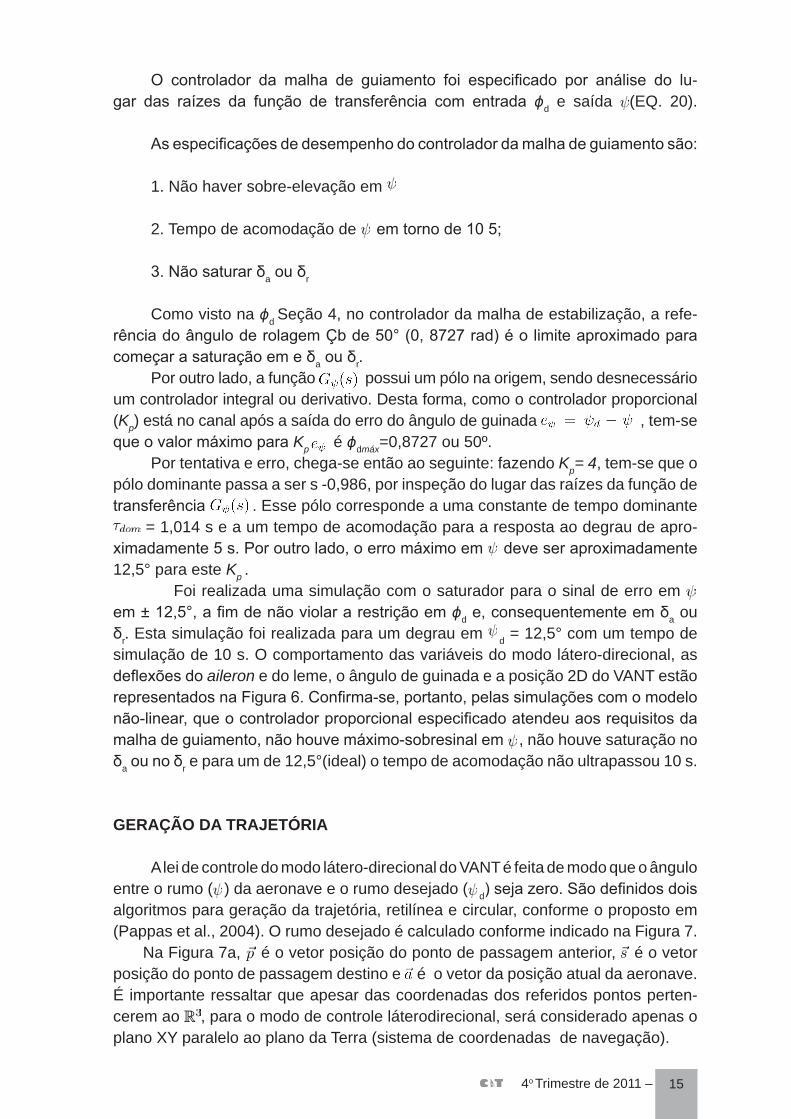
Foi realizada uma simulação com o saturador para o sinal de erro em em ± 12,5°, a fim de não violar a restrição em ϕd e, consequentemente em δa ou δr. Esta simulação foi realizada para um degrau em d = 12,5° com um tempo de simulação de 10 s. O comportamento das variáveis do modo látero-direcional, as deflexões do aileron e do leme, o ângulo de guinada e a posição 2D do VANT estão representados na Figura 6. Confirma-se, portanto, pelas simulações com o modelo não-linear, que o controlador proporcional especificado atendeu aos requisitos da malha de guiamento, não houve máximo-sobresinal em , não houve saturação no δa ou no δr e para um de 12,5°(ideal) o tempo de acomodação não ultrapassou 10 s.
GERAÇÃO DA TRAJETÓRIA
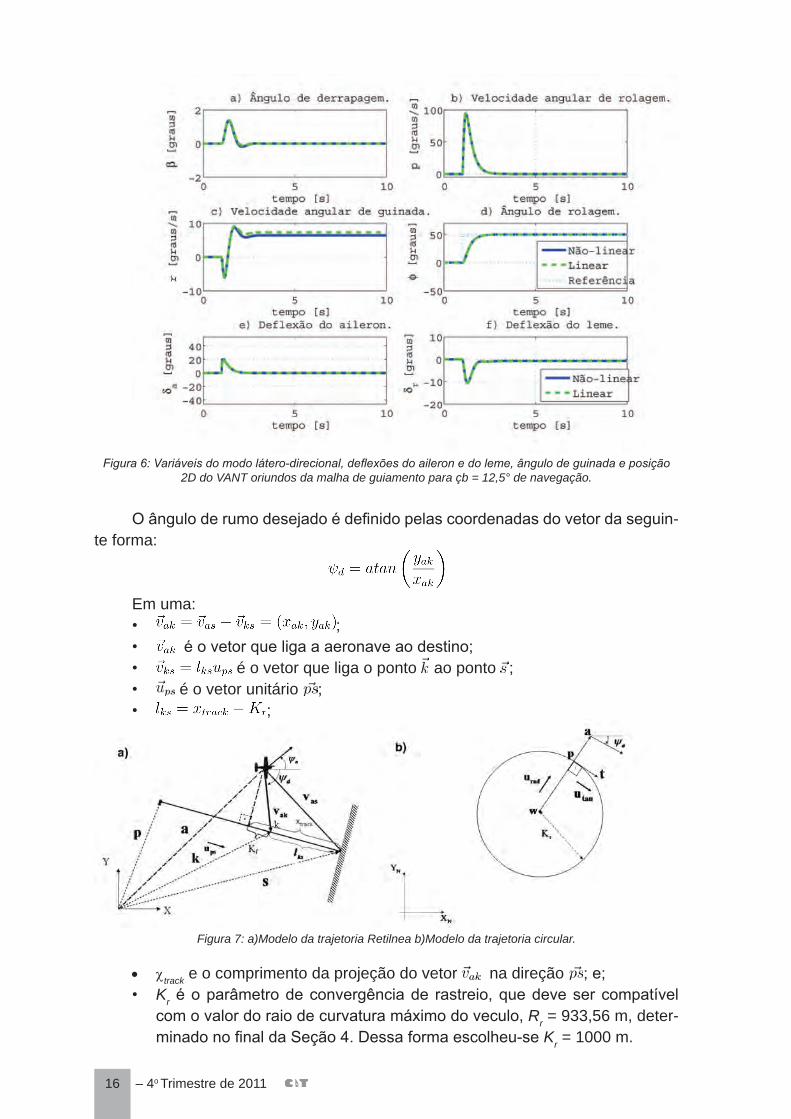
A lei de controle do modo látero-direcional do VANT é feita de modo que o ângulo entre o rumo ( ) da aeronave e o rumo desejado ( d) seja zero. São definidos dois algoritmos para geração da trajetória, retilínea e circular, conforme o proposto em (Pappas et al., 2004). O rumo desejado é calculado conforme indicado na Figura 7. Na Figura 7a, é o vetor posição do ponto de passagem anterior, é o vetor posição do ponto de passagem destino e é o vetor da posição atual da aeronave. É importante ressaltar que apesar das coordenadas dos referidos pontos perten-cerem ao , para o modo de controle láterodirecional, será considerado apenas o plano XY paralelo ao plano da Terra (sistema de coordenadas de navegação).
16 – 4o Trimestre de 2011
Figura6:Variáveisdomodolátero-direcional,deflexõesdoaileronedoleme,ângulodeguinadaeposição2D do VANT oriundos da malha de guiamento para çb = 12,5° de navegação.
O ângulo de rumo desejado é definido pelas coordenadas do vetor da seguin-te forma:
Em uma:• ;• é o vetor que liga a aeronave ao destino;• é o vetor que liga o ponto ao ponto ;• é o vetor unitário ;• ;
Figura 7: a)Modelo da trajetoria Retilnea b)Modelo da trajetoria circular.
• χtrack e o comprimento da projeção do vetor na direção ; e;• Kr é o parâmetro de convergência de rastreio, que deve ser compatível
com o valor do raio de curvatura máximo do veculo, Rr = 933,56 m, deter-minado no final da Seção 4. Dessa forma escolheu-se Kr = 1000 m.
17 4o Trimestre de 2011 –
A seguir, apresenta-se o cálculo do erro do ângulo de guinada e para alimen-tar o controlador proporcional da malha de guiamento. Seja ’a a normalização do ângulo de rumo atual da aeronave a para o intervalo de define-se o erro no rumo pela diferença e= d – ’a , também devendo ser normalizado de a ir. O erro e alimenta então o controlador da malha de guiamento.
O fim de uma etapa de trajet6ria retilínea é marca-do quando o veículo atinge o semiplano perpendicular a ps indica-do na região hachurada na Figura 7a, dado pela configuração: χtrack< 0. A trajetória circular é dada pela Figura 7b em que:
• é o ponto a ser sobrevoado;• é a posição atual de VANT;
• o vetor unitário na direção radial;• o vetor unitário na direção radial;• ’a é o rumo atual da aeronave;• ’next é próximo rumo a ser seguido e• ’next é próximo rumo a ser seguido e• Tobs é o tempo de observação.
Para o cálculo do rumo desejado na trajetória circular, aplica-se o algoritmo de gera-ção de trajetória retilínea com , em que é o parâmetro de convergência e
A condição de parada é que o tempo de sobrevoo seja maior ou igual ao tem-po de observação e quando ocorre o alinhamento com o próximo trecho, ou seja: t e O.
(22)
CONTROLE DA MISSÃO
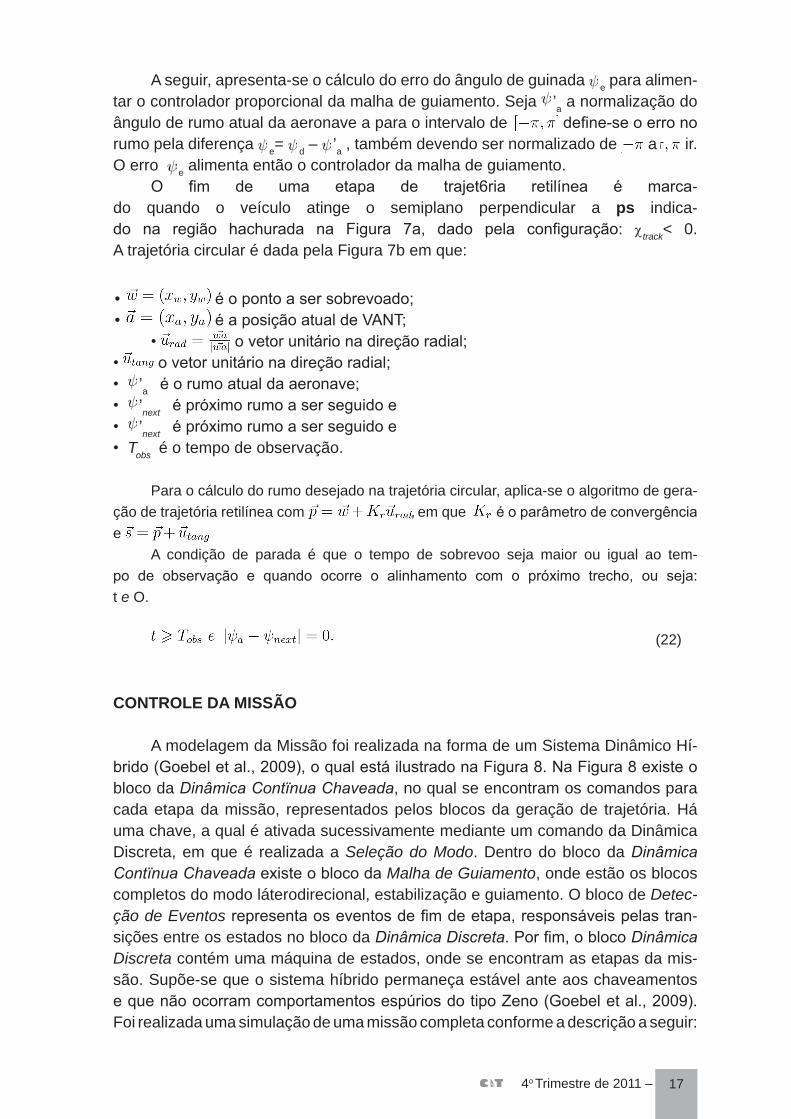
A modelagem da Missão foi realizada na forma de um Sistema Dinâmico Hí-brido (Goebel et al., 2009), o qual está ilustrado na Figura 8. Na Figura 8 existe o bloco da DinâmicaContïnuaChaveada, no qual se encontram os comandos para cada etapa da missão, representados pelos blocos da geração de trajetória. Há uma chave, a qual é ativada sucessivamente mediante um comando da Dinâmica Discreta, em que é realizada a Seleção do Modo. Dentro do bloco da DinâmicaContïnuaChaveada existe o bloco da Malha de Guiamento, onde estão os blocos completos do modo láterodirecional, estabilização e guiamento. O bloco de Detec-ção de Eventos representa os eventos de fim de etapa, responsáveis pelas tran-sições entre os estados no bloco da DinâmicaDiscreta. Por fim, o bloco DinâmicaDiscreta contém uma máquina de estados, onde se encontram as etapas da mis-são. Supõe-se que o sistema híbrido permaneça estável ante aos chaveamentos e que não ocorram comportamentos espúrios do tipo Zeno (Goebel et al., 2009). Foi realizada uma simulação de uma missão completa conforme a descrição a seguir:
18 – 4o Trimestre de 2011
• Etapa 1: Trajetória retilínea do ponto (Om, Om) até o ponto (9.000m, 9.000m),
• Etapa 2: Trajetória circular ao redor do ponto (10.000m, 10.000m) por 180 s no sentido horário, com rumo final de 450.
• Etapa 3: Trajetória retilínea do ponto (10.000m, 10.000m) até o ponto (19.000m, -1.000m),
• Etapa 4: Trajetória circular ao redor do ponto (20.000m, Om) por 180 s no sentido antihorário, com rumo final de -135°,
• Etapa 5: Trajetória retilínea do ponto (20.000m, Om) até o ponto (10.000m, -10.000m),
•Etapa 6: Trajetória retilínea do ponto (1O.000m, -1O.000m) até o ponto (1O.000m, Om),
• Etapa 7: Trajetória retilínea do ponto (tO.000m, Om) até o ponto (Om, Om).
Figura 8: Sistema Híbrido.
A trajetória do VANT para o modelo não-linear está ilustrada na Figura 9. É notório verificar o funcionamento dos algoritmos de geração de trajetória de acordo com o especificado, a estabilidade frente aos chaveamentos e a não violação das restrições das superfícies de controle e ângulos.
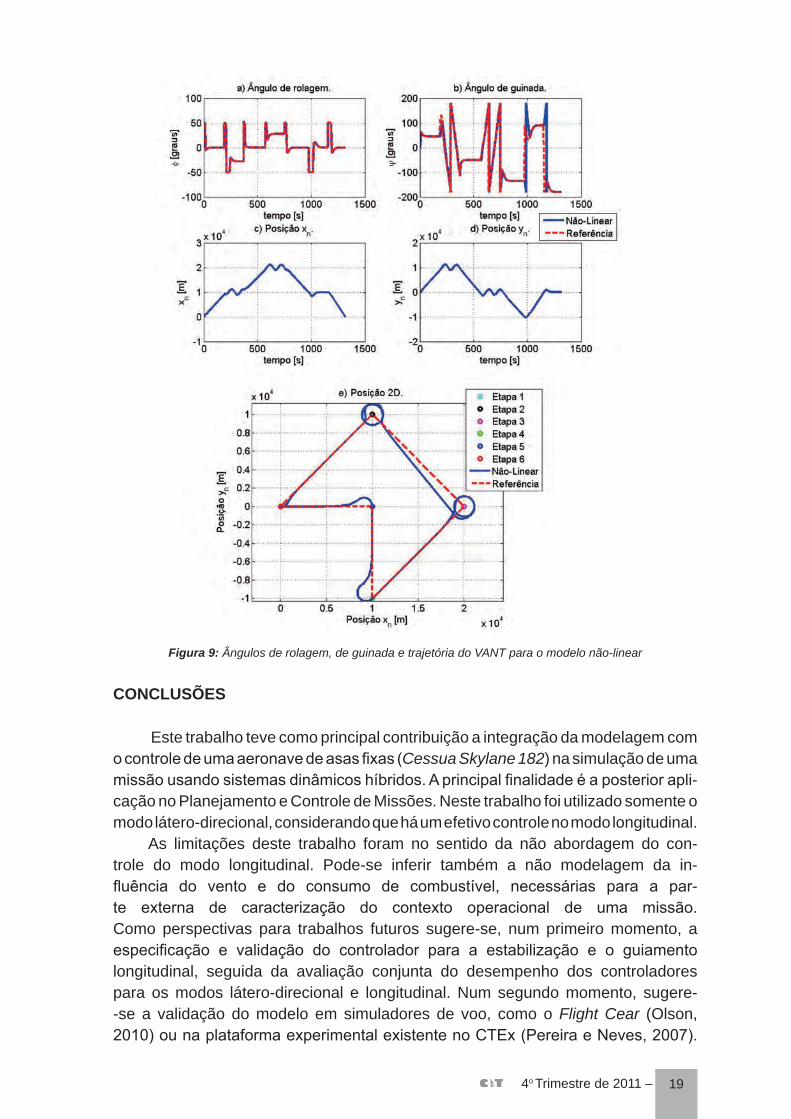
19 4o Trimestre de 2011 –
Figura 9: Ângulos de rolagem, de guinada e trajetória do VANT para o modelo não-linear
CONCLUSÕES
Este trabalho teve como principal contribuição a integração da modelagem com o controle de uma aeronave de asas fixas (Cessua Skylane 182) na simulação de uma missão usando sistemas dinâmicos híbridos. A principal finalidade é a posterior apli-cação no Planejamento e Controle de Missões. Neste trabalho foi utilizado somente o modo látero-direcional, considerando que há um efetivo controle no modo longitudinal. As limitações deste trabalho foram no sentido da não abordagem do con-trole do modo longitudinal. Pode-se inferir também a não modelagem da in-fluência do vento e do consumo de combustível, necessárias para a par-te externa de caracterização do contexto operacional de uma missão. Como perspectivas para trabalhos futuros sugere-se, num primeiro momento, a especificação e validação do controlador para a estabilização e o guiamento longitudinal, seguida da avaliação conjunta do desempenho dos controladores para os modos látero-direcional e longitudinal. Num segundo momento, sugere--se a validação do modelo em simuladores de voo, como o Flight Cear (Olson, 2010) ou na plataforma experimental existente no CTEx (Pereira e Neves, 2007).
20 – 4o Trimestre de 2011
REFERÊNCIAS BIBLIOGRÁFICAS
- Alves, O. d. L. E. (2010). Planejamento e Controle de Missões de um VANT de Asa Fixa, disserta-ção de mestrado, Instituto Militar de Engenharia, Rio de Janeiro. - Blakelock, J. H. (1991). Automatic Control ofAircraft and Missiles, 2 edn, John Wiley & Sons. - Bélanger, J., Desbiens, A. e Gagnon, E. (2008). Uav guidance with respect of arrival specifications,I6thMediterraneanConferenceonControlandAutomation- Costa, G. 5. e Carrilho da Cunha, A. E. (2008).Utilizaçãodaverificaçãodesistemashíbridosparaoplanejamento de missões de veículos aéreos não-tripulados, XVII Congresso Brasileiro de Automótica. - Erehse, G. (2005).Phaver:Algorithmverificationofhybridsystemspasthytech,HybridSystems: Computation and Control HSCC’05. - Garrido, R. O. e Carrilho da Cunha, A. E. (2009). Aplicação da síntese de supervisores de sistemas híbridos ao planejamento de missões de veículos aéreos não tripulados., IX Simpósio Brasileiro de Automação Inteligente - Goebel, R., Sanfelice, R. G. e Teel, A. R. (2009). Hybrid dynamical systems, IEEE Control Systems Magazine. - González, J. M. E., Carrilho da Cunha, A. E., Cury, J. E. R. e Krogh, B. H. (2001). Supervi-sion of event driven hybrid systems: Modeling and synthesis, in M. D. Benedetto e A. San-giovanniVincentelli (eds), Anais do th International Workshop on Hybrid Systems: Com-putation and Control (‘HSCC 2001), Vol. 2034 of LNCS, Rome, Italy, pp. 0247—0261. 21- Hemerly, E. M., Neto, N. 5. B., Maciel, B. C. O. e Góes, L. C. 5. (2006).Identificaçãoecontroledeveículosautônomosnão-tripuladoscomasafixa,CongressoBrasileirodeAutomatica-2006.- Jensen, E. e Pedersen, D. R. H. (2005). Autonomous aircraft: A nonlinear approach., Project period: 9-IOth. semester, Eaculty of Engineering and Science - Aalborg University - Institute of Electronic Systems - Department of Control Engineering. - Nelson, R. C. (1989). Flight Stability and Automatic Control, McGraw-Hill Book Company. - Niculescu, M. (2001). Lateral track control law for aerosonde uav, SPth AIAA Aerospace Sciences Meeting and Exhibit, University of Washington. - Ogata, K. (2003). Engenharia de Controle Moderno, 4 edn, Prentice-Hall. -Olson, C. L. (2010).Elightgear,http://www.br.flightgear.org/.- Pamadi, B. (1998). Performance, Stability, Dynamics and Control ofAirplanes, American Institute of Aeronautics ans Astronautics mc. ISBN 1-56347-222-8. - Pappas, G. J., Bayraktar, 5. e Eainekos, G. E. (2004). Experimental cooperative con-trol of fixedwing unmanned aerial vehicles, 3rd IEEE Conference on Decision and Control. - Pereira, A. R. e Neves, N. D. (2007). Planejamento de trajetórias e simulação de vôo autônomo de aeronave em escala reduzida., Revista CTEx P&D. - Roskam, J. (1979). Airplane Flight Dynamics and Automatic Flight Controls, Vol. 1, Lawrence 1(5: DARcorporation. - Roskam, J. (2001). Airplane Flight Dynamics and Automatic Flight Controls, Vol. Part 1, Design, Analysis and Reserch Corporation (DARcorporation). - Seibel, C., Farines, J.-M. e Cury, J. E. R. (1998). Towards using hybrid automata for the mission planning of unmanned aerial vehicles, in P. Antsaklis, W. Kohn, M. Lemmon, A. Nerode e 5. Sastry (eds), Hybrid Systems V, number 1567 in Lecture Notes in Computer Science, Springer-Verlag, pp. 324—340.

21 4o Trimestre de 2011 –
- Stevens, B. L. e Lewis, E. L. (1992). Aircraft Control and Simulation, 10 edn, John Wiley & Sons, mc, New York, Chichester, Brisbane, Toronto, Singapure 22.

















