Embed Size (px)
Citation preview

Photometry with dispersed images: overview of BP/RP dataprocessing
Anthony BrownLeiden Observatory
GAIA-C5-SP-LEI-AB-009-1
02.06.2006
Abstract. This document provides an overview of the data processing task for the BP and RPphotometers in the new EADS-Astrium Gaia design. The intention is to provide a framework forthe discussion of the details of the BP/RP data processing. Some initial ideas are provided onhow to carry out certain tasks. This document also clarifies what the boundaries and the expecteddata products of the BP/RP data processing are in order to facilitate the derivation of functionalanalyses, requirements, work breakdown structures and development schedules.
A conceptual problem is identified concerning the combination of BP/RP spectra of the samesource measured in different parts of the focal plane. This problem should be studied with highpriority.
The ideas presented in the text arose out of discussions with David Mary and Paola Marrese andalso represent a more worked-out version of the ideas presented in GAIA-C5-TN-ARI-BAS-016.

2
Revision History
Rev. No. Date Author Comments1 02.06.2006 AB Extensive comments were received from U. Bastian, D. Mary, and
C. Bailer-Jones and included in this version of the document. Afew products were added to the data and science products lists andthe numbering was slightly changed. Section 2 was substantiallyrevised an includes a more thorough discussion of the meaning ofdispersed images obtained in TDI mode.
D 03.05.2006 AB draft version

CONTENTS 3
Contents
1 Introduction 5
2 The BP/RP images 52.1 Data pixels vs. physical pixels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.2 BP/RP image formation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3 BP/RP data processing goals 83.1 Aims in the context of the overall Gaia data processing . . . . . . . . . . . . . . . . . . . . . 93.2 Scientific goals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
4 Boundaries of the BP/RP data processing 104.1 Connections to other CUs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
5 Colour and flux estimates from the BP/RP spectra 115.1 Astrometric processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115.2 RVS processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115.3 Processing in CU4, CU7, and CU8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115.4 Deriving colour and flux estimates . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
6 Combining the individual BP/RP spectra 126.1 What is the meaning of the ‘combined’ BP/RP spectrum? . . . . . . . . . . . . . . . . . . . . 136.2 Modelling the combined spectrum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
7 Differential flux calibration 14
8 Differential wavelength calibration 14
9 PSF and LSF calibration 14
10 A detailed optical model of the dispersed images 1510.1 Changes in the dispersion curve as a function of prism parameters . . . . . . . . . . . . . . . 15
11 Absolute flux calibration 16
12 Absolute wavelength calibration 17
13 Effects of CTI on the spectra 17
14 Multiple sources, contaminating background sources, crowded regions 1814.1 Faint background sources . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1814.2 Double and multiple stars . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1814.3 Crowded regions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
15 Extended sources 19
16 But let’s not give up... 19
A Acronyms 21

4 CONTENTS
B Notes on the representation of continuous functions discretized into pixel level data 22B.1 Conventions for pixel coordinates . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22B.2 Discretizing a continuous function on a pixel grid . . . . . . . . . . . . . . . . . . . . . . . . 22B.3 Discretization of continuous functions for arbitrary sub-pixel positions through oversampling . 26

1 Introduction 5
1 Introduction
Up to the beginning of 2006 the planning of the photometric data processing was centred on the concept ofcarrying out all the photometry with a set of pass-bands, which in the Gaia-2 baseline design consisted of thewhite-light G and GS bands and the 5 broad and 14 intermediate bands from the C1B+C1M system. However,in the new EADS-Astrium design there is no longer a separate Spectro telescope and the broad and intermediateband photometry has been replaced with low-resolution slit-less spectroscopy carried out with the aid of prismsplaced in front of the focal plane array. There will be two of these slit-less spectrographs, for clarity and todistinguish from RVS referred to as photometers, one of which operates in the blue (BP; ∼ 330–680 nm) andthe other in the red (RP; ∼ 640–1050 nm). Although the measurement of dispersed images does not alter therole of photometry within the data processing nor its scientific goals, it does require a fundamental rethinking ofthe photometric data processing. The multi-colour information for all objects measured by Gaia will now haveto be extracted from spectra which in turn have to be extracted and calibrated from the raw data coming fromthe satellite. This document is meant as a framework for the discussion of the details of the data processing forBP and RP.
In order to facilitate further discussion the image formation process for the dispersed BP/RP images isdescribed first. Subsequently the overall goals for the BP/RP processing will be given followed by a moredetailed description of the various components of this data processing task. The data processing for the G-bandis not discussed in this document. Throughout the text questions and open issues are highlighted in yellow.
2 The BP/RP images
2.1 Data pixels vs. physical pixels
Before discussing the details of the image formation for BP and RP it is important to establish what the meaningis of dispersed images acquired with CCDs operated in TDI mode. A CCD consists of a rectangular array ofpixels of a certain size which are light sensitive, these will be called physical pixels. The data from a CCDconsists of rectangular arrays of photo-electric charges read from the chip. The elements of the latter arrays willbe called data pixels. For ordinary pointed mode operations of a CCD each data pixel corresponds uniquely toa specific physical pixel on the chip. However for TDI mode the charge in each data pixel is produced by allthe physical pixels along one of the CCDs columns. Thus in the case of Gaia the data pixels are very differentfrom the physical pixels on the CCD. This issue is discussed much more extensively by Bastian & Biermann(2005) (from which these notes are derived) and also in GAIA-ARI-BAS-003.
An important consequence is that Gaia will never observe the optical projection from the sky onto the focalplane array. Instead the transformation from the sky to Gaia’s data space will have to be modelled from theobservations (the so-called geometrical calibration). This also means that the dispersion curve for the prismswill not be observed as some relation between wavelength and location in the focal plane array. The dispersioncurve can only be defined in terms of a relation between wavelength and the offset in the data space with respectto some reference point in the dispersed image (see below).
This distinction between the physical and data pixels has important consequences for the calibration processfor the BP/RP data processing as will be apparent from subsequent sections.
2.2 BP/RP image formation
Here a more complete description of the formation of dispersed images than in GAIA-CA-TN-LEI-AB-005 isgiven. The photon flux of the source SED is N(λ)1 given in photons s−1 m−2 nm−1 for some normalizationwhich will be left unspecified for now. I will use a notation which is consistent with GAIA-ARI-BAS-003 andalso repeat some of the definitions from section 6 of GAIA-C5-TN-ARI-BAS-016 for ease of reference. The
1It assumed that the effects of extinction are already included in the source SED.

6 2 The BP/RP images
Table 1: Quantities in equation (2).F telescope pupil areaτ integration time per CCDN(λ) source SED in units of photons s−1 m−2 nm−1
T0(λ) telescope (mirrors) transmittance (T 6Ag)
Tp(λ) prism (fused silica) transmittanceTf (λ) prism filter coating transmittanceQ(λ) CCD quantum efficiencyPλ monochromatic PSF at wavelength λ
AL and AC data pixel coordinates (or data pixel running numbers) are indicated as k and m. The correspondingcontinuous coordinates in the data space (for example of the exact image centroid in AF) are indicated with(κ, µ). The location in the data space of some reference point (defined by a reference wavelength λ0) in thedispersed image is given by (κ0, µ0). This location can be computed if the complete geometrical calibration ofthe instrument, the instantaneous scan rate, and the centroid of the corresponding SM image are all preciselyknown (GAIA-C5-TN-ARI-BAS-016).
The dispersion curve of the prisms can now be defined with respect to this reference point and is given by:
κ− κ0 = κp(λ, κ0, µ0) and µ− µ0 = µp(λ, κ0, µ0) . (1)
These equations give the offsets κ − κ0 and µ − µ0 as a function of wavelength. Keep in mind from thediscussion above that the dispersion curve only has a meaning in the data space in which the dispersed imageis defined. There is no such thing as a relation between the wavelength of the recorded light and its location onthe CCD or in the focal plane array! This is because due to the along-scan motion of the image the light fromevery wavelength travels across the focal plane array.
The equation for the dispersed image can now be given. Following the notation used in GAIA-LL-050 the2D image I(κ, µ) on the BP/RP detectors is:
I(κ, µ) = Fτ
∫N(λ)T0(λ)Tp(λ)Tf (λ)Q(λ)Pλ(κ− [κp + κ0], µ− [µp + µ0])dλ , (2)
where the different quantities in the equation are listed in Table 2.1 and the PSF Pλ is centred on the point(κp + κ0, µp + µ0). Note that this equation defines the image entirely in the data space. Implicit in theequation are: 1) the dependence of the monochromatic PSFs on the position in the focal plane; 2) the grossvariation of the dispersion curve across the focal plane caused by the tilt of the prisms with respect to theFPA; and 3) the wavelength dependent effects of the transformation from the sky to the data space (i.e. thegeometrical calibration). The latter leads to an additional variation of dispersion curve, depending on theacross-scan position of the image in the focal plane. The PSFs in equation (2) are taken to be monochromaticeffective PSFs, which include the effects listed in Table 2.2 (see also GAIA-CB-02). Note that the PSFs areconvolved with a top-hat function representing a pixel so that they already include the effect of pixel sizeintegration. Thus I(κ, µ) represents the dispersed image before it is sampled by the detector pixel grid. Thiscontinuous representation of what are in reality discretely sampled, or ‘pixelized’, data was described already inthe appendix of GAIA-C8-SP-LEI-AB-006. For convenience I have added this again to the present documentas appendix B.
In the equations above I have made explicit that the dispersion curves themselves depend on the positionin the focal plane where the image was recorded and that the dispersion direction may not be aligned perfectlywith the AL direction (i.e., the function µp(λ, κ0, µ0) is not necessarily constant). This misalignment can occurif the prisms are not perfectly aligned with the CCD pixel grid. Another type of misalignment can occur dueto the optical field not being perfectly aligned with the pixel grids (for example an M1 mirror is rotated about

2.2 BP/RP image formation 7
Table 2: Effects included in the PSF in equation (2). The additional rate errors refer to focal length mismatchbetween the two telescopes and the optical distortion added in orbit when performing the WFE compensation.Both contribute to the TDI error budget (see GAIA-CB-02).
PSF CauseOptical (OTF) optical diffraction
optical aberrations (WFE)Effective (MTF) pixel size integration
TDI smearingattitude induced motionattitude rate errorsoptical design distortionsadditional rate errorscharge diffusioncharge transfer inefficiency
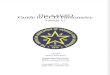
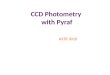
the axis perpendicular to its surface). This type of misalignment is included in the PSF and leads to imagestilted with respect to the AL direction. The different types of misalignment that may occur are illustratedschematically in Fig. 1.
The actual data that will be acquired is the sampled (discretized) version I of I limited to a windowcontaining most of the flux:
I(k, m) =∫I(κ, µ)δ(κ−κ0−k, µ−µ0−m)dκdµ+εI(k, m) k = 0, . . . ,K−1; m = 0, . . . ,M−1 (3)
where the array I consists of K ×M AL×AC pixels and the coordinates κ0 and µ0 again indicate the locationof some reference wavelength λ0 in the data space. The function δ(x) in the equation above represents theimpulse or Dirac delta-function which has the property:∫
f(x)δ(x− a)dx = f(a) . (4)
Thus equation (3) represents the discrete sampling of the continuous function I at the points κ = κ0, κ0 +1, κ0 + 2, . . . , κ0 + K − 1 and µ = µ0, µ0 + 1, µ0 + 2, . . . , µ0 + M − 1. The phase of the sampling withrespect to the pixel grid is included in κ0 and µ0.
In general the 2D dispersed image will not be measured. Instead a 1D vector S of photon counts is measuredby a summation of I in the AC direction:
S(k) =∑m
∫I(κ, µ)δ(κ− κ0 − k, µ− µ0 −m)dκdµ + εS(k) k = 0, . . . ,K − 1 , (5)
where the vector S consists of K samples (each sample consisting of 1 × M pixels). The summation isperformed over a sufficient number of AC pixels (12) so that S contains most of the flux in I. Note that thesamples in S consist of electronically binned pixels (i.e. summed before read-out), therefore I did not writeS =
∑m I which would be correct for numerical binning after read-out. The quantities ε indicate the noise
added to the data due to the measurement process. So variations in S caused by a varying source SED (e.g.,variable star) are not considered noise.
Alternatively, one can think of S as representing an incomplete measurement of a one-dimensional dis-persed image S which is built from wavelength dependent line spread functions or LSFs. The monochromaticLSF is obtained by integrating Pλ in the across-scan direction (this integration is done before the pixel size

8 3 BP/RP data processing goals
(a) nominal case (b) dispersion AL, PSF not aligned
(c) dispersion not AL, PSF aligned (d) combined case
AC
AL, image motion
Figure 1: Different alignment possibilities for the dispersed images produced by BP and RP. The colouredcrosses schematically indicate three of the monochromatic PSFs that build up the dispersed image. The linethrough the middle of the PSFs indicates the dispersion direction and the rectangle indicates the window fromwhich the measurements are extracted.
integration is applied). One can then write for the one-dimensional dispersed image S:
S(κ) = Fτ
∫N(λ)T0(λ)Tp(λ)Tf (λ)Q(λ)Lλ(κ− [κp + κ0])dλ , (6)
where Lλ is the LSF which contains the same effects mentioned in Table 2.2 for the PSF. This equation properlytakes into account the misalignment of the PSFs with respect to the data pixel grid through a broadening of theLSF. The misalignment of the dispersion curve will result in wavelength dependent flux losses outside thewindow because of the AC shift of the PSF centroid (see Fig. 1, panel (c)). Note however that one cannot viewS as a sampled version of S. This is because the LSF is obtained from the PSF by integration from µ = −∞to µ = +∞, whereas the summation over I in equation (5) is only over a limited range in µ.
A proper understanding of the formation of the dispersed images and how this translates to the acquireddata is very important for the data processing so please review the text above critically!
3 BP/RP data processing goals
The goals for the BP and RP data processing are to provide the necessary photometric information to otherparts of the Gaia data processing chain and to provide photometric data as science data in its own right. Thegoals are provided as a numbered list for ease of reference, where ‘DP’ stands for ‘data processing’ and ‘SCI’for ‘science’.

3.1 Aims in the context of the overall Gaia data processing 9
3.1 Aims in the context of the overall Gaia data processing
To support the overall Gaia data processing chain the BP/RP processing must provide:
DP-1 Broad band colours for the chromatic corrections in the astrometric global iterative solution.
(a) Instantaneous colours and fluxes during the initial data treatment (IDT).
(b) Calibrated (mean) colours for the re-processing steps during the intermediate data update (IDU).
DP-2 The flux in the RVS-band for RVS processing.
(a) Instantaneous RVS fluxes during IDT.
(b) Calibrated (mean) RVS fluxes for the re-processing steps during IDU.
DP-3 Diagnostics generated from the raw BP/RP spectra that can be used in the science Quick-Look anddetailed First-Look processing.
DP-4 An internal flux scale, constructed separately for BP and RP, to which all the BP/RP spectra can bereferred.
DP-5 A mean internal pseudo-wavelength (or data pixel) scale, constructed separately for BP and RP, to whichall the BP/RP spectra can be referred.
DP-6 A local internal pseudo-wavelength (or data pixel) scale. Here ‘local’ refers to the fact that the pseudo-wavelength scale will vary as a function of position in the focal plane.
DP-7 Mean BP/RP spectra calibrated onto the internal flux and mean pseudo-wavelength scales defined in DP-4 and DP-5. These spectra can subsequently be tied to a physical flux and wavelength scale to generatemean end-of-mission spectra.
DP-8 Epoch BP/RP spectra calibrated onto the internal flux and mean pseudo-wavelength scales defined in DP-4 and DP-5. These spectra can be used for a variability analysis. Should the epoch spectra be calibratedon a physical flux and wavelength scale in order to be used in CU7?
DP-9 Epoch BP/RP spectra calibrated onto the internal flux scale (DP-4) and the local pseudo-wavelength scaledefined in DP-6. For these spectra the resolution intrinsic to a certain focal plane position is preserved.
DP-10 A provisional automatic classification of the BP/RP spectra. This refers to an independent (rough)classification which will be used internally in CU5.
DP-11 Spectral variability indicators (again for internal CU5 use).
DP-12 CCD calibrations in terms of their response (differences) on all spatial (from pixel columns to the wholeCCD) and temporal scales and as a function of wavelength.
DP-13 Calibration of the PSF and LSF as a function of wavelength and position in the focal plane. The cali-bration of the PSF/LSF must include a detailed understanding of the effects of TDI operation of the focalplane, especially the effects of charge transfer inefficiency (flux loss and PSF/LSF shape distortions).
DP-14 Reconstruction of the BP/RP response curves, including the evolution of the response during the mis-sion.

10 4 Boundaries of the BP/RP data processing
3.2 Scientific goals
The photometric data will form a scientific product on their own and the aim is to provide:
SCI-1 An absolute (external) flux calibration (i.e., converting the internal flux scale from counts to physicalunits).
SCI-2 An absolute (external) wavelength calibration (converting the internal pixel or pseudo-wavelength scaleto wavelengths in nm). The calibration should be derived for both the mean and local pseudo-wavelengthscales.
SCI-3 Mission-averaged BP/RP spectra reduced to the internal flux and mean pseudo-wavelength scale andflux and wavelength calibrated according to SCI-1 and SCI-2.
SCI-4 Epoch BP/RP spectra reduced to the internal flux and mean pseudo-wavelength scale and flux and wave-length calibrated according to SCI-1 and SCI-2.
SCI-5 Epoch BP/RP spectra reduced to the internal flux and local pseudo-wavelength scale and flux and wave-length calibrated according to SCI-1 and SCI-2.
SCI-6 Calibrated mean and epoch colours for a selected set of ‘photometric bands’.
SCI-7 Classification based science alerts.
The difference between SCI-4 and SCI-5 is that the epoch spectra calibrated to a mean pseudo-wavelengthscale can be directly compared to each other. The epoch spectra calibrated to the local pseudo-wavelength scaleprovide a means of examining the BP/RP spectra at their best ‘resolution’ (i.e., highest dispersion and/or bestquality PSF).
In the case of SCI-7 a duplication of effort between CU5 and CU8 should be avoided and it should also beassessed to what extent this type of alert makes sense. Many BP/RP spectra may be of unknown type at thebeginning of the mission (e.g. due to data mismatch) but will later turn out to be ordinary sources.
4 Boundaries of the BP/RP data processing
The boundaries of the BP/RP processing can be derived from the boundaries of the CU5 processing as a whole(see GAIA-C5-TN-CAMB-FVL-001) and I highlight here just a few issues that will require some further dis-cussion.
Input data This consists of windows centred on the dispersed image of each source, containing most of theflux. The provisional sampling scheme is as follows. For sources brighter than G = 10 the windows willbe read and transmitted as 60× 12 (AL×AC) samples, each sample consisting of 1× 1 pixel (full reso-lution read-out). For sources with 10 < G < 13 a fraction of the windows will be read and transmittedas 60× 12 samples of 1× 1 pixel and the rest is read as 60× 12 samples of 1× 1 pixel but transmittedas 60× 1 samples (numerical binning of 1× 12 samples). For all stars fainter than G = 13 the windowswill be read and transmitted as 60 × 1 samples of 1 × 12 pixels (electronic binning). This scheme maychange depending on telemetry and other constraints. Notably an AL numerical binning may be appliedfor stars fainter than G = 18 (for example summing every two samples and transmitting 30 instead of60).
Classification and variability analysis Goals DP-10 and DP-11 are intended to support the BP/RP process-ing and the classification based science alerts. The detailed variability studies and classification andastrophysical parametrization of sources based on the BP/RP spectra will be left to CU7 and CU8, re-spectively. Maybe the classification needs of CU5 — in terms of the algorithms to be developed — arealready covered by CU8? This needs to be sorted out.

4.1 Connections to other CUs 11
End of mission data product The end-of-mission science data should consist of mean and epoch BP/RP spec-tra that have been reduced to the same flux scale and a mean wavelength scale (SCI-3 and SCI-4). Thismeans that variations in the dispersion curve, and the evolution of the response curve and CTI effectshave been corrected for. In addition we should provide epoch BP/RP spectra that have been reduced tothe same flux scale and to the local wavelength scale (SCI-5).
In all cases the resulting spectra will still contain the effects of the (mean) PSF, which includes all theeffects mentioned in Table 2.2. Thus no attempt will be made to remove the PSF smearing from thespectra (note that this smearing, as is clear from equation (2), is not a simple convolution). This is myview on how far we should take the data analysis but this is open for discussion!
4.1 Connections to other CUs
A number of data products from CU5 will be used by other CUs. A brief listing is provided here. Note that‘calibrated’ can refer to different levels of calibration applied to the data, depending on the purpose of the dataand on the phase of the mission.
CU3 raw and calibrated colours, fluxes, as indicated by U. Bastian the full BP/RP spectra are most likelynot useful for CU3 data processing (e.g., for the chromaticity corrections colours will suffice)
CU4 calibrated colours, calibrated spectraCU6 fluxes in RVS band (raw and calibrated), colours (TBC), calibrated spectra (TBC)CU7 calibrated colours and spectra for every epochCU8 calibrated mean colours and mean spectra (the spectra should probably be on a physical wavelength
scale)CU9 end-of-mission calibrated colours, fluxes and spectra (mean and epoch)
The use of colours and fluxes will be explained in more detail in the next section.
5 Colour and flux estimates from the BP/RP spectra
5.1 Astrometric processing
In order to perform a proper centroiding and chromaticity correction during the astrometric processing, colourinformation on each source from BP/RP is essential. In principle the whole continuous spectrum can be used forthis purpose but this may introduce unnecessary complications and could be very noisy during IDT. Thereforethe thinking at the moment is to estimate several (5–6) broad band colours from the raw and/or combinedspectra and use these for IDT/IDU.
5.2 RVS processing
For the RVS data processing an estimate of the source flux in the RVS wavelength range is needed. For theon-board processing this is necessary in order to drive the selection procedure for RVS observations. For on-ground processing it is necessary to know the flux and colour of all sources (including those not measured inRVS) in the RVS-band in order to correctly disentangle overlapping spectra and to make a proper correction forbackground sources.
5.3 Processing in CU4, CU7, and CU8
The simple broad band colours and RVS flux estimates may also be very useful for the data processing in theseCUs (TBC, CU8 will probably only use the full spectra).

12 6 Combining the individual BP/RP spectra
5.4 Deriving colour and flux estimates
A simple estimate for fluxes and colours can be obtained from the spectra through summation of the photoncounts over the wavelength range of the ‘photometric bands’ one is interested in. However, this requires atleast a rough wavelength scale calibration and a good knowledge of the position of the source in the BP/RPwindow. An alternative procedure is to use a description of the shape of the spectra (for example in terms ofsimple functions like B-splines, see below) to extract colour information for every source.
This is an important issue to be investigated during the development of the CU5 data processing algorithmsfor BP and RP.
6 Combining the individual BP/RP spectra
The BP/RP spectrum observed for a given source and transit is a flux vector S(k) which is a sampled (i.e.discretized), summed, and noisy version of the continuous dispersed image I (equation 5) produced by thephotometric instruments. Alternatively S can be seen as a measurement of the one-dimensional dispersedimage S. As explained in Sect. 2.2 I and S include all the effects of the optics and detectors, including thepixel size integration. The goals DP-7 and SCI-3 from Sect. 3 would ideally correspond to deriving the bestestimates for S and I by combining all the measurements of these quantities obtained during the mission. Ican be derived for a small fraction of the stars only so I will concentrate below on S.
If the only difference between spectra S(k) measured at different transits would be the pixel fraction onwhich the source is centred S could be obtained by interleaving the observed spectra and correcting for wave-length dependent flux losses outside the window.
In practice the spectra cannot trivially be combined and only a mean spectrum 〈S〉 (averaged over thedifferent positions in the focal plane where S was measured) can be obtained. I list here the effects that haveto be taken into account when combining the transits for a given source. All these effects lead to a variation ofthe flux vector S(k) from transit to transit and are caused solely by the measurement process.
‘Optical’ effects:
• The dispersion curves of the prisms vary (by ±8.8% and ±4% for BP and RP, respectively) in the ACdirection because the prisms are mounted at a slight angle with respect to the focal plane and because theoptical beam reaching the prisms is non-telecentric (leading to angle of incidence variations).
• The geometrical calibration changes across the focal plane from one CCD to the next and possibly withina CCD. If the change is wavelength dependent this leads effectively to a varying dispersion curve. Theeffect is probably (much) smaller than the variation due to the prism mounting?
• The dispersion curve may evolve with time as the prism material becomes contaminated by radiation inthe L2 environment (TBC).
• The dispersed BP/RP images may be tilted with respect to the AL direction and this tilt may vary acrossthe focal plane. This is illustrated in panel (b) of Fig. 1.
• The dispersion direction may not be aligned along-scan and the misalignment angle may vary across thefocal plane. This is illustrated in panel (c) of Fig. 1. Note that this is not the same as the previous item(compare panels (b) and (c) of Fig. 1). The effect will be a wavelength dependent loss of flux outside thewindow.
‘Discretization’ effects:
• A given source will not always be centred on the same pixel fraction (i.e. the values of κ0 and µ0 inequation (3) are not always the same). This leads to a different S(k) even if the source was observed atexactly the same scan angle.

6.1 What is the meaning of the ‘combined’ BP/RP spectrum? 13
‘Response’ effects:
• The transmission curve of the prism and the filter coatings deposited on their surface may vary across theprism surface and will evolve with time due to radiation effects.
• The CCD QE curve will vary from one CCD to the next.
• Within a CCD there will be large scale and small scale response variations.
• The reflectivity curves of the mirrors and the QE curves of the CCDs will evolve in time during themission.
‘PSF’ effects:
• The PSF and LSF vary across the focal plane due to varying wavefront errors, optical distortion, TDIsmearing, charge transfer diffusion, CTI, etc.
• The PSF and LSF will also vary with time mainly due to increasing radiation damage to the CCDs. Thiswill cause an increasing loss of flux and an evolving shape distortion of the PSF/LSF.
• The PSF/LSF may be under-sampled for certain wavelength ranges in the spectrum (especially in theblue).
6.1 What is the meaning of the ‘combined’ BP/RP spectrum?
Given all the effects just discussed it is not clear what the meaning is of the average 〈S〉 of S taken over the focalplane. This is an issue that was also discussed in GAIA-C5-TN-ARI-BAS-016. Let us consider a simplifiedone-dimensional version of equation (6):
S(κ) = Fτ
∫N(λ)T (λ)Lλ(κ− [κp + κ0])dλ , (7)
where T (λ) now encapsulates all the different contributions to the overall response curve. At a different posi-tions in the focal plane a different spectrum S ′ is obtained:
S ′(κ) = Fτ
∫N(λ)T ′(λ)L′
λ(κ− [κ′p + κ′0])dλ . (8)
All quantities in the integral except N(λ) will be different (for constant point sources). The dispersion curvemay be very different. What then does it mean to try and measure (S + S ′)/2? The two spectra are measuredwith respect to a different wavelength scale, have different spectral resolutions, and different amounts of smear-ing due to the LSF. In addition the flux in the higher-dispersion spectrum will be lower roughly by the factor bywhich the dispersion is increased. Thus even if the spectra S and S ′ are brought onto the same wavelength orpixel scale (assuming a good differential wavelength calibration exists) it is still not clear what the averagingmeans. Especially the noise properties of an ‘average’ spectrum are ill-defined. It may well be that we can onlycombine spectra be degrading all the spectra of the same source to the lowest ‘resolution’ at which the sourcewas observed (i.e., lowest dispersion and worst PSF). In this context I think a ‘deconvolution’ of the spectra(whatever that means) is not desirable.
Additional problems are that epoch spectra are difficult to compare, especially if one is after subtle changesin the spectra, and that the determination of astrophysical parameters for sources will surely suffer from anyaveraging process.
I may have missed something but I think the combination of spectra is an important issue that needs to beunderstood properly in order to avoid going down the wrong path with the data processing.

14 9 PSF and LSF calibration
6.2 Modelling the combined spectrum
Assuming that a mean BP/RP spectrum 〈S〉 can be defined, I mention here briefly some possibilities of derivingthis quantity during data processing2.
1. Make use of existing methods that were developed for the combination of images onto a common under-lying pixel grid, such as the ‘drizzle’ or ‘aXedrizzle’ methods developed for HST data processing (seeFruchter & Hook, 2002; Kummel et al, 2004). It is not at all clear whether these methods are applicableto BP and RP.
2. Model 〈S〉 in terms of simple fitting functions such as B-Splines. The idea being that the description of〈S〉 improves as more and more data are accumulated. An advantage here would be that the descriptioncould be used to easily extract pseudo broad-band colours from the BP/RP spectra. These could forexample be related to the B-Spline coefficients. Also for this approach it is an open question whether itwill work given the complications described above.
3. Adapt the image reconstruction methods developed by Claire Dollet (Dollet, 2004; Dollet et al., 2005)to the problem of modelling the BP/RP measurements in terms of the 1D or 2D continuous dispersedimage.
The combination of the spectra will in any case involve the establishment of differential flux and wavelengthcalibrations as well as a PSF/LSF calibration. These tasks are discussed in the next sections.
7 Differential flux calibration
The task of differential flux calibration for the BP/RP spectra is aimed at placing all spectra on a single internal(instrumental) flux scale, thereby correcting for all response effects mentioned in Sect. 6.
This task will have to be iterated with the differential wavelength calibration because a meaningful com-parison of the fluxes of the spectra can only be made if they are on the same pixel or pseudo-wavelength scale.
8 Differential wavelength calibration
This is the task of correcting for all influences that lead to a changing relation between wavelength and thesample offset (κ−κ0) within the dispersed image. The aim is to place all BP/RP spectra on the same underlyingdata pixel or pseudo-wavelength scale. This means removing all the optical and discretization effects mentionedin Sect. 6.
It is not clear if this differential calibration can be achieved in isolation from the absolute wavelength cali-bration.
9 PSF and LSF calibration
Because no direct images can be obtained for BP and RP the calibration of the PSF and LSF will be complicated.For bright stars (G < 13) it is foreseen to transmit windows with the full pixel resolution (i.e. a 2D dispersedimage) and this can be used to get a handle on the variations of the PSF AC as a function of wavelength. Forthe AL direction the PSF may be constrained using emission line objects with strong and narrow lines.
The main open issue here is to formulate to what level of detail the calibration of the PSF/LSF is neededand what is actually feasible in the context of working with dispersed images.
2These ideas are currently being worked out by David Mary in Heidelberg.

10 A detailed optical model of the dispersed images 15
10 A detailed optical model of the dispersed images
From Sect. 2.2 it is clear that a detailed optical model of how the dispersed images are formed will be essentialto the goal of obtaining mean end-of-mission spectra that accurately approximate the continuous spectrum S.Such a model includes the following items:
• The physical dispersion curve of the prisms derived from the measured index of refraction for fused silica(at the operating temperature), the top angle and the distance of the prism to the focal plane.
• The variation of the physical dispersion curve across the focal plane due to the mounting details of theprisms and the effects of a non-telecentric optical beam.
• The relation between the physical dispersion curve and the dispersion curve as defined in the data space(which is the only one we will observe!).
• The relation between the geometrical calibration and the resulting apparent variations with position inthe focal plane of the prism dispersion curves.
• An understanding of the causes of possible tilts in the dispersed images with respect to the AL direction.
• An understanding of the causes of possible tilts in the dispersion direction with respect to AL.
• A model for the evolution of the properties of fused silica under the influence of the radiation environmentat L2. This includes the transmission and the index of refraction as a function of wavelength.
10.1 Changes in the dispersion curve as a function of prism parameters
The first two items above can be studied analytically once the index of refraction as a function of wavelengthis known. A couple of the equations are given here. For the spectra of BP and RP the distances of the prismto the focal plane are of the order of 20–30 cm, while the length of the spectra AL is of the order of 40 pixels.Thus the difference in refraction angle between the reddest and bluest wavelengths is ∼ 0.0016 radians whichmeans that one can write for the dispersion curve:
s(λ) = h(ξ(λ)− ξ0) , (9)
where the s(λ) is the linear distance in the dispersion direction, h the height of the prism above the focal planeand ξ the angle of refraction. Note that this formulation assumes that we can actually observe the relationbetween wavelength and position in the focal plane. This will not be the case as discussed in section 2 anda proper modelling of the dispersion curve in the data space is needed. Nevertheless I provide the followingmathematical discussion as a starting point.
The angle of refraction for some reference wavelength is ξ0, which can be set to zero for this discussion.The exact equation for the angle of refraction is:
ξ(λ) = θ + arcsin(sinα
√n2(λ)− sin2 θ − sin θ cos α)− α , (10)
where θ is the angle of incidence on the prism, α is the top angle of the prism, and n(λ) is the refractiveindex of fused silica. For θ ≈ 0◦ and small top angles (about 10 degrees or less) one can write to very goodapproximation:
s(λ) ≈ h(n(λ)− 1)α . (11)
The spectral dispersion in units of, e.g., nm/pixel is given by:
dλ
ds=
(ds
dλ
)−1
, (12)

16 11 Absolute flux calibration
where
ds
dλ=h
dξ
dλ
=h
(1
1− (sinα(n2 − sin2 θ)1/2 − sin θ cos α)2
)1/2
sinαn
(n2 − sin2 θ)1/2
dn
dλ. (13)
The functional form for n(λ) may be given as n2(λ)− 1 = f(λ) and in that case the derivative dn/dλ can beobtained from:
dn
dλ=
12n
d
dλ(n2 − 1) . (14)
Using the same approximation as for equation (11) one can write:
ds
dλ≈ hα
dn
dλ. (15)
For the modelling of the change of the dispersion curve as a function of one of the parameters h, α or θ itis interesting to know whether the relative change 1/s(ds/dh), etc, is constant with wavelength (making thechange of the dispersion curve a simple multiplicative factor). This is obviously the case for a change of h. Fora change of the angle of incidence the exact relation is:
1s
ds
dθ=
1ξ
dξ
dθ, (16)
where
dξ
dθ= 1−
(1
1− (sinα(n2 − sin2 θ)1/2 − sin θ cos α)2
)1/2 cos θ(sin θ + (n2 − sin2 θ)1/2 cos α)(n2 − sin2 θ)1/2
. (17)
For a change in the top angle of the prism one obtains:
1s
ds
dα=
1ξ
dξ
dα, (18)
where
dξ
dα=
(1
1− (sinα(n2 − sin2 θ)1/2 − sin θ cos α)2
)1/2
(cos α(n2 − sin2 θ)1/2 + sinα sin θ)− 1 . (19)
From a numerical evaluation of these equations one can show that 1/s(ds/dθ) is constant to within 1% overthe wavelength range of BP or RP, while the value of 1/s(ds/dα) is constant to within 0.6% (for the values ofα used by Astrium which are about 3 and 10 degrees). So to first order one can consider the variations in thedispersion curve due to changes in h, θ or α to lead to a simple stretching or squeezing of the wavelength scalewith respect to the pixel grid.
11 Absolute flux calibration
Ultimately the BP/RP spectra should be tied to a physical flux scale once they have been referred to an internalflux scale (cf. Sect. 7). This requires spectrophotometric observations of standard sources over the wavelengthrange 300–1100 nm. This can realistically only be achieved through ground-based observations. A plan forproviding such observations is given in GAIA-C5-TN-BO-MBZ-001.

12 Absolute wavelength calibration 17
12 Absolute wavelength calibration
The combined BP/RP spectrum will be given on an internally defined pixel or pseudo-wavelength scale afterall the effects mentioned in Sect. 6 have been accounted for. This internal scale has to be converted into anabsolute wavelength scale. This comprises two steps; on-ground and in-orbit calibration.
The calibration on-ground can be done in the laboratory with arc-lamps and should provide a wavelengthcalibration as a function of position in the focal plane. This will not be applicable to the in-orbit situation(see section 2) but will provide a starting point for modelling the variations across the focal plane. Ideallythese measurement should be done by acquiring dispersed images in TDI mode in the laboratory. This is acalibration task that Astrium should take up and we should make sure that they provide us with the necessarymeasurements.
In orbit the wavelength calibration can only be achieved by making use of natural features in the spectra ofobserved sources. Candidate calibrators are:
• Emission line stars; Be stars and other Hα emitters, Wolf-Rayet stars, Symbiotic stars, etc.
• A-stars through the Hβ line.
• QSOs at varying red-shifts.
• Planetary nebulae.
For all these sources their suitability in terms of wavelength coverage, sharpness of the lines and numbersas a function of magnitude should be investigated.
13 Effects of CTI on the spectra
During the Gaia mission the CCDs in the focal plane will be damaged mainly by particles in the solar wind,especially during solar flares. Gaia will be launched during solar maximum which means that the effects ofradiation damage will dominate the CCD calibration.
One of the effects caused by particles passing through the CCDs is that so-called traps are created which canhold electrons in the same position on the CCD for a while before releasing them again. The leads to two effectsin a PSF image which is clocked through the CCD lines during TDI operation (GAIA-CH-TN-ESA-AS-009):
1. Some fraction of the signal charge will be lost from the PSF if the electrons are trapped and not releaseduntil after the PSF image has moved on.
2. The PSF will be distorted due to more trapping occurring from the front of the PSF than from the rearand because very fast traps tend to remove charge from the leading edge of the PSF and release them intothe trailing edge.
This has the following effect on the BP/RP spectra:
1. The leading edge of the spectra will suffer charge loss and towards the end of the mission may be lostcompletely (as the radiation damage effects accumulate).
2. The rest of the spectrum will be contaminated by charges removed from the leading edge and releasedwhen the trailing part of the spectrum passes over the traps.
Because of the length of the dispersed images the total charge lost due to CTI effects may be small. How-ever, the distorted PSF (containing a long trailing tail) will lead to much more smearing of the spectral featuresin the SED of a source. The length of the spectra may also cause a so-called self-curing effect in that the

18 14 Multiple sources, contaminating background sources, crowded regions
pixels at the leading edge of the spectrum will loose charges and thus fill the traps. The subsequent parts of theBP/RP spectrum then suffer much less CTI effects. This will only work if we ensure that the leading edge ofthe spectrum is also the one with the highest photon counts. In general this will be the red edge of the BP/RPspectra. It remains to be seen to what extent this self-curing will really work.
The calibration of CTI effects will have to be taken into account in the BP/RP data processing from the startand will form a very important component of the whole effort.
14 Multiple sources, contaminating background sources, crowded regions
The real sky does not consist of isolated point sources but contains binaries and multiple stars, crowded regions,and faint background sources located very near target stars. In all these case a disentangling of the BP/RPspectra for different sources is required. I mention a number of cases here and make some remarks on eachof them. This section is mainly meant for stimulating the thinking about the processing of BP/RP data fornon-isolated point sources.
14.1 Faint background sources
This category refers to sources with magnitudes fainter than G = 20 that are close and bright enough tocontribute a significant amount of flux to the BP or RP window around a target source. These can be opticalprojections or physical companions of the target source. The presence of these sources can be determinedfrom the images that will be reconstructed from the SM1+2 and AF5 data. This can be done for sources upto 3 magnitudes (TBC) fainter than G = 20. This information can be used to take the disturbing source intoaccount. The position in the BP or RP window where the disturbing source contributes most of its flux will beknown and in some case a colour might be estimated from the BP/RP data.
14.2 Double and multiple stars
These are optical or physical binaries and multiple sources that are close enough together that only a singleBP/RP window can be assigned to them. The processing here will depend heavily on the separation andbrightness ratio of the sources and on the information available from the astrometric processing. Unresolvedbinaries may only be recognized as sources with peculiar spectra during the automatic classification of sources.There is a work-package in CU8 for identifying unresolved binaries in the discrete source classifier and a WPfor attempting to determine astrophysical parameters for these sources.
More thinking on the different possibilities for binaries an multiple stars is needed as well as the definitionof the exact boundaries between CU5 and CU4 processing.
14.3 Crowded regions
In dense regions of the sky the dispersed images may overlap and also the windows that should be assigned totarget sources may overlap. Overlapping images will lead to sources contaminating each other’s spectra. In thecase of overlapping windows Astrium foresees to transmit a full window for one of the sources involved andtruncated windows for the others. This means that in crowded regions we will in principle have all informationavailable to disentangle spectra. The positions and brightness of sources relative to each other will be knownfrom the astrometric processing.
A much more extensive discussion on crowding issues is given in GAIA-CA-TN-LEI-PM-001 althoughthis report still assumes that window overlaps are not allowed.
An important issue to tackle for crowded regions will be the reliable estimation of the sky background. Thismay well involve modelling in terms of known background sources (with G > 20) which will be known fromthe images reconstructed from SM1+2 and AF5.
Keep in mind that the data for crowded regions also mostly consists of the 1D spectra S(k)!

15 Extended sources 19
15 Extended sources
In the case of extended sources (such as galaxies or planetary nebulae) the dispersed image will in additioninclude a convolution with the light distribution of the source on the sky. This will lead to an additionalsmearing of spectral features. This smearing will depend on the orientation of the source shape with respect tothe scan angle.
16 But let’s not give up...
Lest we all end up feeling a bit depressed after reading this document let me stress again that it is intended tostimulate thinking about the data processing for BP/RP by first considering all the complications. This is toensure that we do not miss important issues that need to be taken into account. However, many of the effectsmentioned in section 6 may not be important and we may be able to come up with some simplifications oncewe understand to which accuracy certain effects need to be controlled.
Therefore the next steps to take are:
• Gain a detailed understanding of the level at which all the effects mentioned in section 6 enter the cali-bration process. Which of them can be ignored and to what accuracy do we need to control the others?
• How accurately do we need to establish the internal and external wavelength calibrations?
• Is the noise on the spectra large enough that we may ignore a lot of the complications that arise whentrying to combine the spectra from different transits?
• What calibration measurements can we get (both on-ground and in-orbit) to help constrain the calibrationprocess? We should make sure that the appropriate calibration measurements are indeed done.
Detailed simulations of the effects discussed in this document will play a very important role in thesestudies.
Finally, keep in mind that the approach to the BP/RP data processing (and Gaia data processing in general)should be flexible enough to allow us to adapt our algorithms during the operational phase of the mission.
References
Babusiaux C., Chereau F., Arenou F., 2004, Simulation of the Gaia Point Spread Functions for GIBIS, GAIA-CB-02
Bastian U., 2004, Reference systems, conventions and notations for Gaia, GAIA-ARI-BAS-003
Bastian U., Biermann M., 2005, Astrometric meaning and interpretation of high-precision time delay integra-tion CCD data, A&A 438, 745
Bastian U., 2006, Astronomical photometry from dispersed images (Initial considerations on the usage of Gaia’sRP and BP spectra), GAIA-C5-TN-ARI-BAS-016
Bellazini M., Bragaglia A., Federici L., Dioliati E., Cacciari C., Pancino E., 2006, Absolute calibration of Gaiaphotometric data. I. General considerations and requirements, GAIA-C5-TN-BO-MBZ-001
Brown A.G.A., 2006, Simulating Prism Spectra for the EADS-Astrium Gaia Design, GAIA-CA-TN-LEI-AB-005
Brown A.G.A., 2006, Interface Document for Ad-hoc Simulations of Prism Spectra for the EADS-AstriumGaia Design Design, GAIA-C8-SP-LEI-AB-006

20 REFERENCES
CU5 management group, 2006, Gaia photometric data processing, GAIA-C5-TN-CAMB-FVL-001
Dollet C., 2004, Compression et restauration pour l’imagerie du ciel a haute resolution angulaire
Dollet A., Bijaoui A., Mignard F., 2005, The windows design and the restoration of object environments, inProc. of Symposium ”The Three-dimensional Universe with Gaia”, Paris, France, 4–7 October 2004, ESASP-576, p. 429
Fruchter A., Hook R., 2002, Drizzle: A Method for the Linear Reconstruction of Undersampled Images, PASP114, 144
Lindegren L., Høg E., Jordi C., 2004, Basic assumptions for comparing and optimizing Gaia’s PhotometricSystem, GAIA-LL-050 (v2)
Kummel M., Walsh J.R., Larsen S.S., Hook R., 2004, Drizzling and the aXe Slitless Spectra Extraction Soft-ware, ST-ECF Newsletter 36, p.10–12 (available at http://www.stecf.org/software/aXe/)
Marrese P.M., 2006, Crowding and consequences for windowing schemes for BP and RP, GAIA-CA-TN-LEI-PM-001
Short A., 2006, Calibration of radiation effects in Gaia CCDs, GAIA-CH-TN-ESA-AS-009

A Acronyms 21
A Acronyms
The following table has been generated from the on-line Gaia acronym list:
Acronym DescriptionAC ACross scan (direction)AF Astrometric Field (in Astro)AL ALong scan (direction)BP Blue PhotometerCCD Charge-Coupled DeviceCTI Charge Transfer InefficiencyCU Coordination Unit (in DPAC)FFT Fast Fourier TransformFITS Flexible Image Transport System (data format in Parameter Database)FPA Focal Plane Assembly (Focal Plane Array)GIBIS Gaia Instrument and Basic Image SimulatorHST Hubble Space TelescopeLSF Line-Spread FunctionMTF Modulation Transfer Function (CCD)OTF Optical Transfer FunctionPSF Point-Spread FunctionQE Quantum Efficiency (CCD)QSO Quasi-Stellar ObjectRP Red PhotometerRVS Radial Velocity SpectrometerSED Spectral Energy DistributionSM Sky MapperTBC To Be ConfirmedTDI Time-Delayed Integration (CCD)WBS Work Breakdown StructureWFE WaveFront ErrorWP Work Package

22 B Notes on the representation of continuous functions discretized into pixel level data
B Notes on the representation of continuous functions discretized into pixellevel data
This appendix contains notes on a number of issues concerning the simulation of continuous functions that havebeen discretized at the level of pixels in the process of, for example, detecting optical signals with CCDs.
B.1 Conventions for pixel coordinates
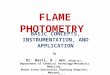
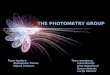
A continuous function f(x, y) is to be discretized into pixel data on a grid of pixels (i, j) where the discretizedfunction takes the values Fij . What is the relation between (x, y) and (i, j)? Two possible conventions areshown in Fig.2.
1. The centres of pixels correspond to integer values of the underlying continuous coordinate system (x, y).In this case the relation between (x, y) and (i, j) is given by:
i = b(x + 0.5)c and j = b(y + 0.5)c , (20)
where the function bzc indicates the truncation of z to the nearest integer smaller than z (the ‘floor’function in computer language). Thus for example the coordinate interval [−0.5, 0.5) maps to pixel 0and [2.5, 3.5) maps to pixel 3.
2. The centres of pixels correspond to half-integer values of the underlying continuous coordinate system(x, y). In this case the relation between (x, y) and (i, j) is given by:
i = bxc and j = byc . (21)
In this case the coordinate interval [0.0, 1.0) maps to pixel 0 and [3.0, 4.0) maps to pixel 3.
The choice of convention does not really matter as long as one applies it consistently. The FITS conventioncorresponds to option 1 and I will use this throughout the rest of the appendix.
B.2 Discretizing a continuous function on a pixel grid
For simplicity I will consider a one-dimensional function f(x) for the following discussion. Extending this totwo (or more) dimensions is trivial. The values Fi of the discretized version of f(x) are calculated for l pixels.Figure 3 shows a simplistic illustration of the discretization of the function f(x) = (sin(2x)/2x)2. Here thepixel level values Fi are generated by integrating f(x) over the interval corresponding to each pixel i:
Fi =∫ i+0.5
i−0.5f(x)dx . (22)
where it is assumed here that f(x) is centred on pixel 0 at the position x = 0.0. Figure 4 shows what happensif f(x) is centred on pixel 0 at the position x = 0.4. Obviously the discretized version is now different withdifferent values for each of the pixels. In general for a function f(x) centred on x = x0
3 one obtains:
Fi =∫ i+0.5
i−0.5f(x− x0)dx . (23)
Thus the discretization of f(x) depends on where the function is centred4 on the pixel (or detector) array. Thisis an especially important effect for functions which are only just sampled with enough pixels. This raises thequestion of how to treat this effect in simulations or in data processing.
3Note that only position shifts in the interval [−0.5, +0.5] need to be considered as the pixel values will be the same for f(x)centred on x0 and x′
0 = x0 ± k, where k is an integer.4‘Centred’ in this context should taken to refer to the location of some reference feature of f(x) on the pixel array. This could in
practice be the centroid or, for example, a reference wavelength in a spectrum.

B.2 Discretizing a continuous function on a pixel grid 23
0.0 1.0 2.0 3.0 4.0
1.0
0.0
2.0
3.0
−0.5 0.5 1.5 2.5 3.5
−0.5
0.5
1.5
2.5
y
x
(0,0) (0,1) (0,2) (0,3)
(1,0) (1,1) (1,2) (1,3)
(2,0) (2,1) (2,2) (2,3)
0.0 1.0 2.0 3.0 4.0
1.0
0.0
2.0
3.0
−0.5 0.5 1.5 2.5 3.5
−0.5
0.5
1.5
2.5
x
y
(0,0) (0,1) (0,2) (0,3)
(1,3)(1,2)(1,1)(1,0)
(2,0) (2,1) (2,2) (2,3)
Figure 2: Conventions for pixel coordinates. The solid lines indicate the pixel grid (i, j) and the red dashedlines show the underlying continuous coordinate system (x, y). The upper panel shows the option where thecentres of the pixels (i, j) correspond to integer values of the underlying coordinate system (x, y). The lowerpanel shows the option where the centres of the pixels (i, j) correspond to half-integer values of (x, y).

24 B Notes on the representation of continuous functions discretized into pixel level data
-5 -4 -3 -2 -1 0 1 2 3 4 5x and i
0.0
0.2
0.4
0.6
0.8
1.0
f(x)
and
Fi
[sin(2.0x)/(2.0x)]2
peak position: 0.00
Figure 3: Discretization of the function f(x) = (sin(2x)/2x)2 when the function is centred on pixel 0 atposition x = 0.0. The solid line is f(x), while the shaded histogram and the black dots show the discretizedversion Fi of f(x).
-5 -4 -3 -2 -1 0 1 2 3 4 5x and i
0.0
0.2
0.4
0.6
0.8
1.0
f(x)
and
Fi
[sin(2.0x)/(2.0x)]2
peak position: 0.40
Figure 4: Same as Fig. 3 when f(x) is centred on pixel 0 at position x = 0.4.

B.2 Discretizing a continuous function on a pixel grid 25
-5 -4 -3 -2 -1 0 1 2 3 4 5x and i
0.0
0.2
0.4
0.6
0.8
1.0
f(x)
and
Fi
[sin(2.0x)/(2.0x)]2
peak position: 0.00
Figure 5: Same as Fig. 3 where the dotted line shows the pixel-smeared version F (x) of f(x) and the aster-isks show the positions where F (x) should be sampled in order to obtain the values of Fi (dots and shadedhistogram). Here the asterisks and dots coincide.
-5 -4 -3 -2 -1 0 1 2 3 4 5x and i
0.0
0.2
0.4
0.6
0.8
1.0
f(x)
and
Fi
[sin(2.0x)/(2.0x)]2
peak position: 0.40
Figure 6: Same as Fig. 5 with f(x) centred on x = 0.4.

26 B Notes on the representation of continuous functions discretized into pixel level data
Another (and more clever) way of viewing the discretization problem is to consider the discretized functionFi as a sampled version of an underlying smooth function F (x) which is the convolution of f(x) with the pixelsmearing function Π(x), where:
F (x) =∫
f(t)Π(x− t)dt , Π(x) =
12 for x = ±1
2
1 for − 12 < x < +1
2
0 elsewhere
(24)
This is illustrated in Figs. 5 and 6 which show the same situation as in Figs. 3 and 4 but including the pixel-smeared version F (x) of f(x). Note that F (x) is always centred on x = 0.0. The asterisks show the positionswhere F (x) has to be sampled in order to obtain the pixel values Fi (dots). It is easy to see that in general for afunction f(x) centred on position x0 one can obtain the values Fi by sampling F (x) at the positions:
xi = δx± n , where n = 0, 1, 2, 3, . . . and δx = −(x0 − b(x0 + 0.5)c) (25)
where Fi will be centred on pixel p = b(x0 + 0.5)c.
B.3 Discretization of continuous functions for arbitrary sub-pixel positions through oversam-pling
The question of how to take arbitrary sub-pixel positions of f(x) into account when simulating Fi now has aclear answer. Instead of applying Eq.(23) repeatedly for many possible values of x0 (or δx) one can calculatethe continuous version F (x) of Fi once and for all using Eq.(24) and then sample it according to Eq.(25).
If f(x) is available in analytical form or can be obtained from straightforward numerical calculations (suchas FFTs applied to a pupil function plus wavefront errors) then one can directly calculate F (x) by convolution.However it may not be possible to easily obtain f(x) for arbitrary values of x and for storage space reasons itis not always desirable to use the continuous (very densely sampled) version of F (x).
The solution is to calculate the values of F (x) only for enough sub-pixel positions δx such that any arbitrarysub-pixel positions can be obtained through simple interpolation schemes. Thus one obtains an oversampleddiscretization of f(x) which consists of N interleaved arrays Fi where N is the oversampling factor. Forexample for N = 4 one could calculate F (x) for δx = −0.25, 0.0, +0.25, +0.5 and then store the results inan array F ′
j of length N × l. If Fi is desired for δx = −0.25 one reads off every fourth value of F ′j starting
from the appropriate index j. For arbitrary values of δx one calculate the corresponding grid of positions andinterpolate the values of F ′
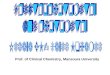
j .The four times oversampled case is illustrated in Fig. 7. Each symbol represents F (x) sampled at a different
sub-pixel position. The dots are for δx = −0.25, the open circles for δx = 0, the triangles for δx = +0.25, andthe asterisks for δx = +0.5. Note that the peak of f(x) in these cases is centred on some pixel p with sub-pixelpositions +0.25, 0.0, −0.25, −0.5 (see Eq.(25)). Thus, for example, the pixel values Fi when f(x) is centredon position x0 = p + 0.25 correspond to the dots.
Note that the set of values for δx chosen above is arbitrary, another choice could have been δx = −0.4,−0.15, +0.10, +0.35 or δx = 0.0, 0.25, 0.50, 0.75. This former choice has the practical drawback that thediscretized version of f(x) centred on a certain pixel has to be obtained through interpolation. To make adefinitive choice one can use the following convention.
1. Assume that the discretized version of f(x) is desired for l pixels.
2. For N times oversampling generate simulated values of Fi corresponding to f(x) centred on the coordi-nates x0(i):
x0(i) = {0,1N
, . . . ,N − 1
N}+ δx0 , where i = {0, 1, . . . , l − 1} . (26)
The position δx0 corresponds to the sub-pixel location (in the interval [−0.5,+0.5)) of the centroid orsome other feature of f(x). The total number of simulated values will thus be N × l.

B.3 Discretization of continuous functions for arbitrary sub-pixel positions through oversampling 27
-5 -4 -3 -2 -1 0 1 2 3 4 5x
0.0
0.2
0.4
0.6
0.8
1.0
F’ j(
x)
[sin(2.0x)/(2.0x)]2
4 times oversampled
Figure 7: Four times oversampled discretization of the function f(x) = (sin(2x)/2x)2. Each symbol representsF (x) sampled at a different sub-pixel position. The dots are for δx = −0.25, the open circles for δx = 0, thetriangles for δx = +0.25, and the asterisks for δx = +0.5. Note that the peak of f(x) in these cases is centredon some pixel i with sub-pixel positions +0.25, 0,−0.25,−0.5 (see Eq.(25)).