Embed Size (px)
Citation preview

Appendix A
Phasor Analysis
A.l Vector Representation of Sinusoids: The Concept of Phasors
Consider the harmonic, or sinusoidal, time functions
u(t) = urnax sin wt;
v(t) = vrnax sin(wt - a). (A.l)
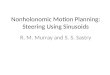
These functions may represent steady-state voltages, currents, velocities, or any other physical variables. Graphically, the functions may be depicted (Figure A.I) as the vertical projections of the rotating vectors U and V. These vectors have the lengths urnax and vrnax ' respectively, and rotate with the angular velocity, w, [rad/s].
The algebraic sum
wet) = u(t) + vet) (A.2)
is also sinusoidal and can be represented by the projection of a third rotating vector, W. This vector is obtained as the vectorial sum of the vectors U and V as shown in Figure A. I.
It is clear that analysis of sinusoidally varying quantities can be carried out by a geometric study of vectors. The studies can be further simplified by "freezing" the rotating vectors in a given position. Such "time-frozen" vectors are often referred to as phasors. One may think of a phasor as a snapshot of a rotating vector.
Example A-I
Find the sum w of the two sinusoids
u(t) = 6 sinwt,
v(t) = 5 sin(wt - 37°). (A.Ll)
Solution: The two vectors U and V are shown in an x-y coordinate system (Figure A.2). For simplicity they have been "frozen" at the instant when the U vector
405

406 Appendix A Phasor Analysis
FigureA.l
y
u x
---- -- ----v w
FigureA.2

A.1 Vector Representation of Sinusoids: The Concept of Phasors 407
coincides with the x axis. According to our definition, the rotating vectors have been turned into phasors. The U phasor, which coincides with the x axis, is referred to as the reference phasor.
If the sum of the two phasors U and V is the phasor, W we first determine its components, Wx and Wy along the x and y axes, respectively, and obtain
Wx = 6 + 5 cos 37° = 9.993,
Wy = 0 - 5 sin37° = -3.009. (A.1.2)
I wi is given by
Iwi = \1'9.993 2 + 3.009 2 = 10.436. (A. 1.3)
The angle I W of phasor, W relative to the reference phasor is
( Wy) (-3.009) ~= tan-I - = tan- I = -16.76°. Wx 9.993
(A. 1.4)
For the time function, wet), we can write
wet) = 10.436 sin(wt - 16.76°). (A. 1.5)
ExampleA.2
A sinusoidal current,
i = imax sin wt [A], (A.2.1)
is injected into a circuit consisting of a resistor, R, in series with an inductor, L, and a capacitor, C. Describe the steady-state voltages vR , vL , and Vc defined in Figure A.3.
Solution: The voltage across the resistor, according to Ohm's law, equation (3.23) is
V R = Ri = Rimax sin wt [V].
The voltage across the inductor, from equation (3.70), is
i L C
-=----A.M.J\r--.rmnI~---1~ -
, y v
FigureA.3
y vc
(A.2.2)

408 Appendix A Phasor Analysis
di vL = L- [V],
dt
= wLimax cos wt [V],
= wLimax sin (wt + 90°) [V].
The voltage across the capacitor, from equation (3.11) is
1 1 f Vc = CQ = C idt
= - i sin wt dt = - - cos wt 1 f imax C max wC
= imax sin (wt - 90°) [V]. wC
(A.2.3)
(A.2.4)
Summary: The resistor voltage vR is a sinusoid and in phase with the current i. The inductor voltage vL and capacitor voltage Vc are likewise sinusoidal but, respectively, leading and lagging the current by 90°. If we represent the above time variables by the phasors VR , VL , Vc ' and I, respectively, we obtain the phasor diagram shown in Figure A.4.
y
I x
FigureA.4

A.l Vector Representation of Sinusoids: The Concept of Phasors 409
ExampleA.3
For the circuit in Example A2, we have the following numerical values:
imax = 10 [A],
R = 20 [0],
w = 377 [rad/s] (60 Hz), (A3.1)
L = 0.040 [H],
e = 300 [JLF]'
Find the amplitudes of the voltages across R, L, and e, and also the total voltage across the circuit.
Solution: From equation (A2.2) we get,
vR max = Rimax = 20 . 10 = 200
From equation (A2.3),
[V].
vLmax = wLimax = 377 . 0.040 . 10 = 150.8
From equation (A2.4),
v = imax = 10 = 88.4 C max we 377 . 300 . 10-6
(A3.2)
[V]. (A3.3)
[V]. (A3.4)
The total voltage v across the circuit in Figure A3 is the sum of the individual voltages. By representing v by its phasor V, we obtain the latter simply by vectorial addition (Figure AS) of the phasors VR , VL , and Vc. We get
y
v Vc
FigureA.5

410 Appendix A Phasor Analysis
Ivl = Y200 2 + (150.8 - 88.4)2 = 209.5 [V]. (A.3.5)
I (
150.8 - 88.4) fl: = tan- = l7.33°. 200
(A.3.6)
For the total voltage we can write,
v = 209.5 sin(wt + 17.33°) [V]. (A.3.7)
A.2 Phasor Representation Using Complex Numbers
Complex algebra is a most valuable analytical tool for the study of phasors. We first give a very brief expose of complex algebra followed by examples.
A.2.1 Complex Numbers: Definition
Figure A.6 shows a complex number plane. The complex number z is defined by its coordinates, x andjy, along the real and imaginary axes, respectively. We write the complex number z in the cartesian form:
z = x + jy. (A.3)
The factor j is defined by
(A.4)
We say that x is the "real part of z," and y the "imaginary part." The distance I z I from the origin to the coordinate point z is referred to as the modulus or magnitude of z.
jy-axis
~~------------~z
Izl
x x-axis
Figure A.6

A.2 Phasor Representation Using Complex Numbers 411
We have
(A.5)
The angular orientation I..!:. of z in reference to the real axis is obtained from
From Figure A.6 we have
Euler's theorem 1 states that
I..!:. = tan- 1 C)
x = Izl cos I..!:., y = Iz I sin I..!:..
ej ~ = cos I..!:. + j sin I..!:. The complex number z can be written in the alternate polar form:
z = x + jy,
I z I cos I..!:. + j I z I sin I..!:., Izl(cosl..!:. + jsinl..!:.) = Izlej / z •
A.2.2 Complex Algebra
(A. 6)
(A.7)
(A.8)
(A.9)
Addition, subtraction, multiplication, and division of complex numbers are defined in terms of the same operations valid for real numbers. We give one example of each operation.
ExampleA.4
Given the two complex numbers
z\ = 3 + jl and Z2 = 4 - j2, (A.4.1)
I This theorem can be proved as follows: From the series
x 2 x 3 X4
eX = 1 + x + 2! + 3! + 4! + ... ,
we obtain
. . ~2 .~3 ~4 e1<P = 1 + J~ - - - J - + - + ...
2! 3! 4!
= cos~ + jsin~

412
find:
(i) ZI + Z2'
(ii) ZI - Z2'
(iii) ZI Z2'
(iv) ZI/Z2'
Solution:
Appendix A Phasor Analysis
(i) The sum of the complex numbers is obtained as follows:
ZI + Z2 = (3 + jl) + (4 - j2)
= (3 + 4) + j(l - 2) = 7 - jl.
Note that the real and imaginary parts are added separately.
(A.4.2)
Note also (Figure A.7) that if each complex number is associated with a phasor, then the complex sum of the numbers corresponds to a vectorial addition of the phasors.
(ii) The difference:
ZI - Z2 = (3 + j1) - (4 - j2)
=(3-4)+j(1 +2)= -1 +j3.
(iii) The product:
Z,Z2 = (3 + j1)(4 - j2)
= 3 ·4 + (j 1)( - j2) + j(1 ·4 - 3 . 2)
= 14 - j2.
jy t
Figure A.7
x ---
(AA.3)
(A.4A)

A.2 Phasor Representation Using Complex Numbers 413
(iv) The quotient:
Zl _ 3 + j1 _ (3 + jl)(4 + j2) Z2 - 4 - j2 - (4 - j2)(4 + j2)
3·4 + (j I) (j2) + j(1. 4 + 2·3)
16 + 4
10 10 = 20 + j 20 = 0.5 + jO.5.
By using the polar fonn of complex numbers, we obtain (v) The product:
ZlZ2 = (3 + j1)(4 - j2) = 3.162ejI8.435° ·4.472e-j26.5W
= 14.140e-j8.13Qo = 14.140(0.990 - jO.141)
= 14.00 - j2.oo (as before).
(vi) The quotient:
(as before).
ExampleA.5
3 162ej 18.4350 Zl = . _ j45° Z2 4.472e-j26.5W - 0.707e ,
= 0.5 + jO.5
Use complex algebra to solve Example A.3.
(A.4.5)
(A.4.6)
(A.4.7)
Solution: If we express the voltage phasors, VR , VL , and Vc as complex numbers we get
VR = 200 [V].
VL = j 150.8 [V]. (A.5.1)
Vc = - j88.4 [V].
The applied voltage represented by the phasor V is then obtained by the applicationofKVL:
V = VR + VL + Vc = 200 + j150.8 - j88.4,
= 200 + j62.4 = 209.5ejI7.33° [V].
When the total voltage is expressed as a function of time, we get
vet) = 209.5 sin(wt + 17.33°)
Compare this to equation (A.3.7).
[V].
(A.5.2)
(A.5.3)

414 Appendix A Phasor Analysis
A.3 Impedances
Consider the phasor P and the complex number z. The product zp can be written as
zp = Iz kilo Ip ki.e = Iz lip k(il+ i.e). (A 10)
We make the following observation:
Multiplication by z results in a magnitude amplification of I z I and a phase advancement by L.!:. degrees.
In particular, when a phasor is multiplied by the factor j, it is rotated counterclockwise through the angle 90° with an unchanged magnitude. Multiplication by the factor -j results in a clockwise rotation through 90°. Consider the four phasors shown in Figure A4. In view of equations (A.2.2), (A2.3), and (A2A), and in consideration of the multiplication rules above, we can write:
VR = RI [V];
[V]; (All)
I I Vc = -j-I = - [V].
wC jwC
The voltage phasor V, representing the applied voltage across the circuit, is the sum (Figure A.5) of the individual voltage phasors, that is,
1 V = RI + jwLI + - I [V]
jwC (AI2)
= (R + jwL + -. 1_) I [V]. }wC
The multiplication factors R,jwL, and l/jwC, which when multiplied by the current phasor, I give us the voltage phasors, are referred to as the impedances of the individual elements (Ohm's law applied to impedances). We use the symbol, Z for impedances and for the resistor, inductor, and capacitor, respectively, we get
ZR == R [0]
ZL ==jwL [0] (A 13)
1 [0]. Z =-
c - jwC
The total impedance, Z, for the series circuit is, according to equation (AI2),
I Z = R + jwL +
jWC [0]. (A14)

A.3 Impedances 415
v
FigureA.8
In symbolic form, the relationships between impedances and current and voltage phasors are shown in Figure A8.
ExampleA.6
Find the impedance of the R-L-C circuit assuming the numerical values given in Example A3.
Solution: We obtain
~=R=20 [0],
~ = jwL = j377· 0.040 = j15.08 [0],
I I Zc = jwC = j377. 300 . 10-6 [0];
8.84 [ ] =-. =-j8.84 O. ]
The total impedance is equal to
Z = 20 + j15.8 - j8.84 = 20 + j6.24 [fl].
ExampleA.7
(A6.1)
(A 6.2)
(A6.3)
(A6.4)
If a voltage of 100 V rms is applied across the circuit of Example A6, find the rms values of the current and voltages across each of the three circuit elements and write all voltages and current as functions of time.
Solution: If we chose the applied voltage Vas our reference phasor, that is,
V = looeW = 100 [V]. (A7.1)
(Note that the "length" of the phasor has been assumed to be proportional to its rms value, that is, vrnaxtV2. This is practical because we are usually interested in the rms values of ac variables rather than their peak values.)
From equation (AI2) we then get

416 Appendix A Phasor Analysis
V 100eW 1= - = [A];
Z 20 + j6.24
.00
100e} _ -j17.330
20.95ej17.330 - 4.773e
(A.7.2)
[A].
(Note that the value of the current is in rms because the voltage was expressed in rms.) For the voltages across the components, we have
VR = ZR 1 = 20. 4.773e-j17.33° = 95.47e-jI7.33°
VL = ZL 1 = j15.0S. 4.773e-jI7.33° = 71.9Sej72.67°
[V];
[V];
Vc = Zcl = -jS.S4·4.773e-jI7.33° = 42.1gejI07.33° [V].
(A.7.3)
Note that if we show the above phasors in a phasor diagram, we obtain the same diagram as in Figure A.5 but reduced in scale and rotated clockwise by 17.33°.
If we express the voltages and current as functions of time we obtain
v(t) = 100\12 sin wt = 141.4 sinwt [V],
i(t) = 6.750 sin(wt - 17.33°) [A],
vR(t) = 135.0 sin(wt - 17.33°) [V], (A.7.4)
vL(t) = I01.S sin (wt + 72.67°) [V],
vC<t) = 59.67 sin(wt - 107.33°) [V].
ExampleA.8
The spring-mass-dashpot system shown in Figure A.9 is subjected to a sinusoidally varying force, f(t). Find the displacement, x, and the velocity, s, of the mass when it is in the steady state.
Solution: The restraining forces of the spring and dashpot are
fsp = kx [N] (A.S.I)
and
[N], (A.S.2)
respectively, where k and kd are constants. According to Newton's laws of motion, the acceleration, d 2x/ dt2, of the mass
will be proportional to the force acting on it, hence
dx d 2x f(t) - kx - kd dt = m dt 2 [N], (A.S.3)

A.3 Impedances
Equilibrium __ -.level
f(t) = f max sin wt
FigureA.9
or, in terms ofthe velocity,
f ds f(t)=fmaxsinwt=k sdt+kds+m
dt
In steady state, the velocity will be sinusoidal and of the form:
s = Smax sin(wt + i..!..). [mls].
By substitution of equations (A.8.S) into (A.8.4) we obtain
[N].
k f max sin wt = - smax sin (wt + i..!.. - 900 )
w [m/s];
+ kdsmax sin(wt + i..!..) [m/s];
+ mwsmax sin (wt + i..!.. + 900 ) [m/s].
417
(A.8.4)
(A.8.S)
(A.8.6)
We now represent the force,f(t), by the phasor, F, and the velocity, s(t), by the phasor, S, in accordance with
F = f maxejOO [N];
[m/s] (A.8.7)
These phasors are shown in Figure A.I 0, where we have also shown the displacement phasor, X. (X lags S by 900 • Why?)
In terms of these phasors we can write equation (A.8.6) as follows:

418 Appendix A Phasor Analysis
s
F (Reference phasor)
FigureA.I0
k F = ---:- S + kdS + jwmS
JW [N]. (A8.8)
This equation is similar to equation (AI2) and we can therefore define the mechanical impedance, Zm as
k Zm == kd + jwm + ---:
JW [N· s/m].
We then can write equation (A8.8) in the shorter form:
ExampleA.9
F S=-
Zm [mls].
For Example A8 we have the following numerical values:
f max = 10 [N],
m = 1 [kg],
k = 100
kd = I
[N/m] ,
[N· s/m].
Determine the amplitude of the velocity, smax' as a function of w.
Solution: We have
100 Zm = I + jw + -.
JW [N· s/m].
(A8.9)
(A8.1O)
(A9.1)
(A9.2)

A.3 Impedances 419
Combining equations (A8.?) and (A8.1O) we obtain
lOew 1 + jew - 100/w)
[mls] (A9.3)
that is
10 s = --;======"'::
max VI + (w - 100/w)2 [m/s]. (A9.4)
I.!. = -tan-1 (w _ 1~0) (A9.5)
We have plotted Smax and I.!. against w in Figure All. Note that the peak: of the velocity occurs at w = 10 radls. This is the resonance frequency. It is interesting to note that I.!. = 0 at resonance; that is, at resonance the velocity and the force are in phase:
f res = f max sin wt [N];
[m/s].
Smax mist t I!.. degrees
5 smax
FignreA.ll
20
(A9.6)
-w rad/s

420 Appendix A Phasor Analysis
A.4 Admittances
Consider the parallel circuit shown in Figure A12. For the currents, II and 12 flowing in the impedances ZI and Z2 we have
[A].
The total current, I is
I = I + I = ~ + ~ = V(~ + ~) I 2 ZI Z2 ZI Z2
We introduce the concept of admittance as follows:
and the total admittance,
[S].
Equation (A16) can then be written in the form:
1= V(Y1 + Y2 ) = VY
Example A.tO
[S].
[A].
(A15)
[A]. (AI6)
(AI7)
(AI8)
(AI9)
Connect the three impedances in Example A6 in parallel and feed this circuit from an ac generator delivering 100 V rms, at 60 Hz. Find the current drawn from the generator.
Solution: The three parallel elements represent a total admittance of
1 1 1 Y=- + --+ [S]
20 j15.08 -j8.84
= 0.0500 - jO.06631 + jO.l131 [S] (A1O.1)
= 0.0500 + jO.0468 [S]
I -v
Figure A.12

A.4 Admittances 421
Equation (A. 19) then gives
1= lDO(0.0500 + jO.0468) = 5.00 + j4.68 = 6.85ej43.1l" [A]. (A.lD.2)
Note: The current I leads the voltage V by 43°, that is, the parallel circuit draws a leading current-it is capacitive. When the three circuit elements were connected in series across a lDO-V source (Example A.7), the current was 4.7 A, and it lagged the voltage by 17°-the series circuit was inductive. The explanation of this phenomenon is left as an exercise for the reader.

Appendix B
Spectral Analysis
B.1 Periodic Waveforms
A function or "wave," f(t), is said to be periodic if, for all values of t, it satisfies the equation
f(t) = f(T + t), (B.l)
where Tis the period (see Figure B.l). According to Fourier's theorem, it is possible to express a periodic function as
an infinite sum of harmonic components in accordance with 00
f(t) = Ao + ~ Av sin (vwt + cf», v=)
where
27T w=-
T [radls].
is the base orfundamental radian frequency. If we make use of the trigonometric identity
sin (a + f3) = sin a cos f3 + cos a sin f3 ,
we can write the series (B.2) in the alternate form: 00
f(t) = Ao + ~ (Bvsinvwt + Cvcosvwt). v=)
(B.2)
(B.4)
(B.5)
The amplitudes Ap and phase angles CPv in the series (B.2) are related to the coefficientsBvand C)n the series (B.5) by
A = VB 2 + C2 v v v (B.6)
422

, ,
f(t)
t
B.2 Finding the Amplitudes of the Harmonics
FigureB.l
, ,
--t
423
The constant Ao represents the "de" component or average value of the periodic wave. The coefficients AI' A2 , ••• are the amplitudes of the first, second, ... harmonies. The "first" harmonic (of frequency w) is also referred to as the "fundamental" or "base" component.
B.2 Finding the Amplitudes of the Harmonics
It can be shown 1 that the coefficients in equation (B.5) may be derived from the following:
2 IT Bv = - f(t) sin vwt dt; T 0
(B.7)
Cv = ~ IT f(t) cos vwt dt. T 0
The de component is computed from
1 IT Ao = - f(t) dt. T 0
(B.8)
1 The proof is carried out as follows: 1. Multiply both sides of equation (B.5) by the factor sin (11M). 2. Integrate both sides over one full time period. In so doing, one finds that all integrals on the
right side are equal to zero except the integral: T L sin 211wtdt
which is equal to BJ/2. The first line of equation (B.7) is obtained. The second line of equation (B.7) can likewise be confIrmed by following the above steps, but
using cos (11M) as a multiplication factor. Finally, equation (B.8) is obtained by integrating both sides of equation (B.5) over one full cycle.

424 Appendix B Spectral Analysis
If the average value of the periodic wave is zero, it clearly has no de component. Certain features of the wave (symmetry) may simplify the task offinding the harmonics, as demonstrated in the following example.
Example B.1
Consider the periodic "triangular" wave shown in Figure B.2. Find the fundamental component and all higher harmonics of this wave.
Solution: We first explore the symmetry features of this wave. We note in particular that the wave is characterized by
f(t) = - f(T- t), (B. 1.1)
and
(B.1.2)
On the basis of equations (B.l.l) and (B.1.2) we can make the following observations:
Observation 1. Write the integral (B.8) in two parts:
Ao = ! fT f(t) dt = ! [fT!2 f(t) dt + ( f(t) dt] ToT 0 JT/2
(B.1.3)
Because of equation (B .1.1), the two parts of the integrals are equal but of opposite sign. Therefore, Ao = 0; the wave contains no de component; its average value is zero.
Observation 2. For a cosine wave we have,
cos vwt = cos vw(T - t). (B.IA)
In view of equation (B.I.I), it is clear that the second set of integrals (B.7) vanishes for all v. Therefore,
C v =0 for v=I,2,3, ... ,oo,
that is, the wave contains no cosine terms.
Observation 3. For a sinewave we have
sin vwt = sin vw(f - t) for odd v's,
sinvwt = -sinvw(f - t) for even v's.
(B.1.5)
(B.1.6)
(B.1.7)

B.2 Finding the Amplitudes of the Harmonics 425
Because of equation (B.l.2) it is clear that the first set of integrals of (B.7) vanishes for all even values of P;
Bp = 0 for p = 2,4, 6, ... , 00. (B. 1.8)
It follows that the wave contains only odd harmonics.
Observation 4. In view of equation (B.l.2), (B. 1.6), and (B.l. 7) the product
f(t) sinpwt (B.1.9)
attains identical values for t, (f - t), (f + t) and (T - t) (assuming p is odd).
Thus we need to perform the integration of (B. 7) over only one-quarter cycle; that is,
8 LT/4 Bp = - f(t) sin pM dt for P = 1,3, 5, ... ,00
T 0 (B.LlO)
In the interval 0 < t < T/4 the functionf(t) (see Figure B.2) is a straight line of the form:
A f(t) = 4-t.
T
Substituting into equation (B.LlO) we get
" T/4 Bp = 32 A2 L t sin PlLIt dt
T 0 for p == 1,3,5, .... 00.
, , ,
f(t)
t
FigureB.2
/ / ,
-+t
(B.Lll)
(B.Ll2)

426 Appendix B Spectral Analysis
The integral gives the following for Bp : A
B =~2A2(-1)(P+3)/2 for v=1,3,5, ... ,oo. p 7T v
(B.1.13)
The triangular waveform is described by the infinite series
8 A[ 1 1 J j(t) = -2 A sinwt - - sin3wt + - sin5wt - ... 7T 9 25
(B.1.14)
In practice, one obtains very good accuracy by including only the first few terms in the series. Figure B.3 shows the original triangle compared to the waveform obtained by including only the first three terms in the series.
B.3 Spectral Analysis by Numerical Integration
In many practical cases one cannot perform the analysis as neatly as the previous example would have us believe. Often the periodic wave is obtained experimentally and the functionj(t) is available not in analytic form but as a graph.
In such situations, the spectral analysis must be carried out numerically using approximations for the integrals (B.7) and (B.8).
f(t)
_41------------"""7'......---Triangular wave
..
Figure B.3

B.3 Spectral Analysis by Numerical Integration 427
9 t i(/) amps
8
7
6
5 ~------~--------~-----T----------------------~ 4
3
6 12 14 16 20_ 1 millisecs
FigureB.4
ExampJeB.2
Figure B.4 shows the magnetization current in a power transformer as recorded in an experiment (see Figure 5.9). The base frequency is 50 Hz, which means that the period, T is equal to 20 ms. Carry out a spectral analysis of the waveform. Specifically, find the amplitude of the 50-Hz component.
Solution: Because the functionJ(t) cannot be expressed in an analytical form, we must calculate BI and CI by using the J(t) values obtained from the graph.
We can write the integrals (B.7) as the approximations:
211t n
BI "'" --~ ir sinwtr; T r~1
(B.2.1)
We have divided the time interval 0 < t < Tinto n time segments of width I1t. In Figure B.4, we have chosen n = 20, which corresponds to I1t = 1 ms. The value

428 Appendix B Spectral Analysis
Table B.t
r ir wtr number amperes degrees sinwtr ir sinwtr coswt ir coswt
1 2.1 9 0.156 0.329 0.988 2.074 2 2.9 27 0.454 1.317 0.891 2.584 3 3.3 45 0.707 2.333 0.707 2.333 4 4.5 63 0.891 4.010 0.454 2.043 5 6.2 81 0.988 6.124 0.156 0.970 6 8.0 99 0.988 7.902 -0.156 -1.251 7 9.0 117 0.891 8.019 -0.454 -4.086 8 6.0 135 0.707 4.243 -0.707 -4.243 9 0.6 153 0.454 0.272 -0.891 -0.535
10 -1.8 171 0.156 -0.282 -0.988 1.778
Sum 34.267 1.667
of the current, ir, in the center of each time segment is recorded. We then compute and tabulate wtr, sin wtr, and cos wtr for each value of tr in the interval. Finally the products ir sin wtr and ir cos wtr are computed. The results are shown in Table B.I. Because of the symmetrical nature of the waveform, we can use
f(t) = -f(T/2 + t) (B.2.2)
and perform the summation over half the period. This means that we compute B1 and C1 from the following expressions:
4 dt ./2 BI = --L ir sin wtr,
T r=1
4 dt ./2 C1 = -- L ir cos wtr·
T r=1
By using the values obtained from Table B.l we get
4· 0.001 BI = 0.020 ·34.267 = 6.853,
4·0.001 C1 = 0.020 . 1.667 = 0.333.
(B.2.3)
(B.2.4)
By using equation (B.6) we compute the amplitude and phase angle of the base harmonic or the fundamental as

8.4 Periodic Waveforms in the Space Domain
Al = Y6.853 2 + 0.333 2 = 6.853;
4> = tan- 1 (0.333) = 278° 1 6.853··
The fundamental component of the current in the wavefonn is
where
i(t) = 6.861 sin (wt + 2.78°) [A],
27T W = -- = 314
0.020 [rad/s].
B.4 Periodic Waveforms in the Space Domain
429
(B.2.5)
(B.2.6)
(B.2.7)
So far, we have assumed that the independent variable is time, t. This is nonnally the case, as harmonic analysis is most often used in communication theory where time is the variable.
However, there are areas of science and technology where the periodic phenomena to be analyzed involves space variables. For example, the periodic current, emf, and magnetic flux found in the air gaps of electric machines belong to this category.
ExampleB.3
Figure B.5 shows the "sheet of current" in one phase of the distributed stator winding of a three-phase induction machine. We remember from Section 8.4.2
[(x) t 1 -----;~~~~~-__l 1-+ One (distance between pole pain)
" A
,
= 2frD p
1-+-__ frD ____ I
P = Distance between
adjacent poles
FigureB.S

430 Appendix B Spectral Analysis
that this sheet current was created by representing a macroscopic (or "smeared") view of the current distribution in the stator slots.
We also remember that, because the current is ac, the sheet current will pulsate in time. Figure B.5 is therefore a snapshot taken at a given moment in time (e.g, when the current has reached its peak).
Find the amplitude of the fundamental waveform of the sheet current.
Solution: By placing the origin as shown in Figure B.5, the waveform will have the same symmetrical features as the triangular wave in Example B.l. The observations made concerning the harmonics of the triangular wave apply here. The fundamental waveform must therefore be a sinusoid, as shown by the dashed line in Figure B.5. We want to find its amplitude, B,.
The equations derived earlier were in terms of the independent variable, t, and the period, T. Now the independent variable is x and the period is 27TD/p.2 We can therefore use the previous formula after making the following changes to the variable:
t~x
27TD T~~-
p
27T P w=~~~.
T D
Substituting equation (B.3.1) into (B.1.1O), we get
Bv = 4p ('TD/2P f(x) sin (v p x) dx 7TD Jo D
In this case the functionf(x) has the following values (see Figure B.5):
f(x) = 0 for 0 < x < 7TD/3p;
f(x) = A for 7TD/3p < x < 7TD/2p.
The integral (B.3.2) gives
B, = 4p [r1TD/3P o. sin (px) dx + f1TD
/2P A . sin (px) dx],
7TD Jo D 1TD/3p D
= 4p [0 + ~D] = 1 A 7TD 2p 7T
[A/m].
2 The expression 211D/p is the peripheral width of one pole pair.
(B.3.l)
(B.3.2)
(B.3.3)
(B.3.4)
(B.3.5)

B.4 Periodic Waveforms in the Space Domain 431
Example B.4
Use the result obtained in Example B.3 to show analytically that the flux in all three stator phases of an induction motor as well as a synchronous machine, jointly create a rotating "flux wave." (In Sections 4.7.1 and and 8.3, this was shown graphically.)
Solution: The result in Example B.3 can be stated as follows:
[Wb]. (B.4.l)
This represents the fundamental of the stator flux due to the current in phase a as viewed at a particular instant in time. If we multiply equation (B.4.I) by sin wt, we express the pulsating nature of the wave as
2 A (p) <Pal (X, t) = 7r <P sin D x sinwt [Wb]. (B.4.2)
The currents in phases band c give rise to similar fluxes, but they are shifted both in space and time by 27r/3 and 47r/3 radians, respectively, that is,
2 A • (p 27r). ( 27r) <PhI (x, t) = 7r <P sm D x - 3 sm wt - 3 [Wb];
2 A • (p 47r). ( 47r) <Pel (X, t) = 7r <P sm D x - 3 sm wt - 3 (B.4.3)
[Wb].
The total flux is obtained by the sum
<Ptot 1 (x, t) = <Pal + <PhI + <Pel [Wb]. (B.4.4)
Using the same trigonometric manipulations shown in Section 4.4, we determine that the total flux of the fundamental waveform takes the form
3 A • (p ) <Ptot I (x, t) = 7r <P sm D x - wt [Wb]. (B.4.5)
This is the equation for a wave revolving with constant speed and constant amplitude in the positive x direction.

Appendix C
The SI Unit System
C.1 General
The British System of Units, at present the most popular in the United States, has roots that go back to Roman times. Internationally, it is losing ground very fast to the Metric System introduced by the French Academy of Sciences, in the eighteenth century.
C.2 Basic Units
We have summarized in Table C.I the most important features of the SI system as it is related to electric energy engineering.
C.3 Derived Units
Other units derived from the above are called "derived units" of the SI. For example, the unit of force in the SI system is the newton [N]. It is derived from Newton's Second Law (force = mass X acceleration) and is defined as the force
432
Table C.I Basic SI Units
Physical Quantity Name of Unit Symbol
Length meter m Mass kilogram kg Time second Electric Current ampere A Temperature degree Kelvin K
(Other basic units for radioactivity, luminous intensity, and "amount of substance" exist.)

C.S Conversion Between Unit Systems 433
Table C.2 Derived SI Units
Physical Quantity Name of Unit Symbol
Force newton N = kg· mls2
Work (or energy) joule [J] = [N' m] Power watt [W] = [J/s]
Pressure pascal [Pal = [N/m2]
Electric charge coulomb [C] = [A' sl Electric potential volt [V] = [J/C] = [W/A]
Electric capacitance farad [F] = [eN] Electric resistance ohm [0,] = [VIA]
Magnetic flux weber [Wb] = [V, s] Magnetic flux density tesla [T] = [Wb/m 2]
Magnetic inductance henry [H] = [Wb/A]
needed to impart an acceleration of 1 [m/s 2 ] to a mass of 1 [kg]. Force therefore has the dimension "kilogram times acceleration," which is written as [kg· m/s 2].
Consider another example. The SI unit for energy is the joule [J]. It is derived (see Section 2.3) from the basic equation for energy (energy = force X distance) and is defined as the work done or energy generated by a force of 1 [N] acting over a distance of 1 [m]. Energy has the dimension "force times distance," which is written as [N . m].
Table C.2 shows some of the more important derived SI units.
C.4 Multiplication Factors and Prefixes
The SI system is based on decimal units, formed by multiplying or dividing a single base unit by powers of 10. In this manner, widely different unit ranges can be accommodated. For example, a communications engineer is interested in microwatts [J.L W] of power, and his power colleague works with megawatts [MW]. These two units differ by a factor of 10 12.
Table C.3 shows the prefixes and letter symbols for the unit multipliers.
C.S Conversion Between Unit Systems
Conversion between other unit systems and SI units is possible from a knowledge of the basic conversion constants. The most useful ones are given in Table CA.
The conversion factors for the most commonly used energy and power units are given in Appendix D.

434 Appendix C The SI Unit System
Table C.3 Multiplication Factors and Prefixes for Forming Decimal Multiples and Submultiples of the SI Units
Multiplier Exponent Prefix
1 000 000 000 000 000 000 10 18 exa I 000 000 000 000 000 10 15 peta
1 000 000 000 000 10 12 tera 1000 000 000 109 giga
1000000 106 mega 1000 103 kilo
100 102 hecto 10 10 1 deca
0.1 10- 1 deci 0.01 10-2 centi
0.001 10-3 milli 0.000 001 10-6 micro
0.000 000 001 10-9 nano 0.000 000 000 001 10- 12 pico
0.000 000 000 000 00 1 10- 15 femto 0.000 000 000 000 000 001 10- 18 atto
Table C.4 Some Useful Conversion Constants
I m = 3.28083990 ft = 39.37007874 inches I ft = 0.3048000 m I kg = 2.204622621b = 35.27396195 oz I Ib = 0.45359237 kg 1 m3 = 264.1720 gallons (U.S.) 1 gallon (U.S.) = 0.003785412 m3
degrees Kelvin = 5/9 (degrees Fahrenheit) + 255.37 degrees Fahrenheit = 9/5 (degrees Kelvin) - 459.67
Symbol
E P T G M k h da d c m
J.L n p f a
References
ASTM/IEEE Standard Metric Practice, IEEE Standard STD 268-1986. This Booklet may be obtained from IEEE Service Center, 445 Hoes Lane, Piscataway, NJ 08854.

.j>. '" (J1
Uni
t
elec
tron
-vol
t jo
ule
Bri
tish
ther
mal
uni
t w
att-
hour
ki
loca
lori
e to
nnes
oil
equi
v.
Sym
bol
eV
J Btu
W
h kc
al
toe
Tab
le D
.l C
onve
rsio
n of
Uni
ts o
f Ene
rgy
eV
J B
tu
Wh
kcal
1 1.
602
X 1
0-1
9 1.
519
X 1
0-2
2 4.
448
X 1
0-2
3 3.
826
X 1
0-2
3
6.24
X 10
18
1 9.
479
X 1
0-4
0.
278
X 1
0-3
0.
239
X 1
0-3
6.58
6 X
10
21
1.05
5 X
10
3 1
0.29
31
0.25
2 2.
247
X 10
22
3.60
X 10
3 3.
412
1 0.
860
2.61
4 X
10
22
4.18
5 X
10
3 3.
968
1.16
3 1
0.26
2 X
10
30
4.2
X
1010
3.
985
X
107
1.16
6 X
10
7 1.
003
X 10
7
toe
3.81
X 1
0-3
0
2.38
X 1
0-1
1
2.51
X 1
0-8
8.57
X 1
0-8
9.97
X 1
0-8
1
» "'0
"'
0
CD
::J
0- >< o

~
~
Tab
le D
.2 C
onve
rsio
n o
f U
nits
of
Pow
er
Uni
t S
ymbo
l W
hp
B
tu/s
ec
kcal
lsec
» "0
"0
w
att
W
I 1.
34 X
1
0-3
0.
948
X 1
0-3
0.
239
X 1
0-3
CD
::
l ho
rsep
ower
hp
74
6 I
0.70
7 0.
178
a.
x' B
riti
sh th
erm
al u
nits
per
sec
ond
Btu
/sec
1.
055
X
103
1.41
4 1
0.25
2 0
kilo
calo
ries
per
sec
ond
kcal
/sec
4.
184
X 1
03
5.60
7 3.
966
1

Appendix D 437
To convert British thermal units to joules, one must go to the left-hand side of Table D.I and find the row for Btu (row 3). One then follows the row to the column corresponding to joules (column 4). The number given there (1.055 X 103) is the multiplicant for the conversion.
To convert kilocalories per second to horsepower, one must go to the left-hand side of Table D.2 and find the row for kilocalories per second (row 4). One then follows the row to the column corresponding to horsepower (column 4). The number given there (5.607) is the multiplicant for the conversion.

Answers To Selected Exercises
Chapter 1
1.1 m = 445.1 kg
1.2 About 18.31 billion dollars
Chapter 2
2.1 a) 16.5% (or 1.62 b) 1.62 [J/leg]
2.2 a) 0 b) 17,900 [MW] (or 24.0 million hp)
2.3 678.6 [kW]
2.4 The kinetic energy of the elevator must also be included. This energy component amounts to
W kin = t .5000.52 = 62,500 [1].
2.5 9.26 miles per gallon
2.7 .. (M - m)go
rmlsl x= m + M + I/R 2
2.10 !1T = 1.55°C
2.12 a) 30.5 [MJ/kg] b) 4.8% and 95.2%, respectively
Chapter 3
3.1 a) 3vo [V].
438
b) we = (3/2) Cv 2 [1]. c) A force is required to pull the plates apart (the opposite charges
attract). The work done by this force adds to the energy of system.

3.3
3.7
3.9
Answers To Selected Exercises
V a) i(t) = - e-2t/ RC
R [A]
b) The two capacitor voltages can be written as
f (1 + e-2t/ RC ) and f (1 - e-2t/ RC ),
respectively. c) Wo = ~CV2 [J]
439
d) Note that Wo is independent of the R value. Thus, charge redistribution via a very small R (short circuit) results in the same heat loss as a large R. (How is this possible?)
a) 15.6' 10 -3 [N]. (The force on each charge is directed outward in a direction perpendicular to the line between the other two charges.)
b) 11.98 [k Vim ] (directed perpendicular to the base) c) Each charge contributes a field component vector directed away
from the charge. As the three-component vectors have equal magnitudes they cancel.
a) f= 50 [Hz] b) d = 0.00398
3.10 a) i = 0.686
[mm]
[A] b) p = 8.23 c) p = 0.00823
[W] [W/m]
3.12 a) 1.333 [kA] b) 44.8 [MW] c) 633.6 [kV] d) 844.8 [MW] e) 94.7%
3.15 T = 1000 3.18 L = 62.5
L = 2.42
Chapter 4
4.1 Q = ±13.85
[N 'm]
[mH] (without air gap)
[mH] (with 2-mm air gap)
[kVAr]
4.3 Induced voltage = O. (Note that flux linked with stator coil is zero for all rotor positions.)
4.4 a) 459.3 [kW] b) 1377.8 [kW] c) 11022 [kWh]
4.5 a) 15.29 [kV] b) 7.647 [kV per phase] (or 13.24 [kV line to lineD

440 Answers To Selected Exercises
4.8 a) 84.8 [A] b) 146.9 [A] c) S = 215.9 + j 134.7 (3-phase, kilo values)
4.10 a) 0 = 38.68° b) III = 918 [A] (leading the voltage by 19.34°) c) Q = -6.319 MV Ar. (Generator absorbs reactive power, acting like
a shunt reactor.)
. PXs 4.12 a) smo = IvllEI
If P, I vi, and Xs are constants, it follows that sin 8 (and thus 8) will decrease if I E I is increased.
) I v II E I cos <5 - I V 12 bQ=-'------.!--'-----'~~----'------'-
Xs The generator absorbs reactive power if Q < 0; that is, if I E I cos 0 < I vi· If I E I is increased, <5 will decrease (see part a) and cos 8 will increase. Thus the product I E I cos {) will increase, meaning that II E I cos 8 - I vii will decrease, thus decreasing I Q I
c) By 17.9%
4.13 a) 0 = 16.48° b) cf> = 26.57° c) lEI = 14.69
4.14 lEI = 10.76
Chapter 5
[kV]
[kV]
5.1 a) 60 [A] and 150 b) Izi = 1.33 [0]
[A], respectively
5.2 a) 120% of normal flux value b) 100% (200 [YD. The high flux may possibly result in core losses
(and temperatures) that may damage the transformer.
5.3 a) Zs = 0.0806 + j0.418 [0] (on HV side) Zs = 0.0129 + jO.0669 [0] (on LV side)
b) 5.11 % of normal value c) Because the core flux is only 5% of normal value, the core losses
likewise are minute (actually less than 5% of normal values because core losses increase almost by the square of the flux).
5.5 a) 63.66 [A] and 159.2 [A], respectively; Secondary voltage = 200 [V] b) 61.23 [A] and 153.1 [A], respectively; Secondary voltage = 192.4
[V] c) Yes, slightly.
5.7 105 [kV A]

Answers To Selected Exercises 441
5.8 a) 1167 [V] b) Due to the high flux densities (233% of normal. Why?) the core
losses will be very high with overheating as a result.
5.11 150 [kVA] tertiary resistive load in combination with 150 [kVA] secondary resistive load will result in 300 [kV A] primary [kV A]. This is the limit of the primary.
5.12 a) R = 538.2 [0] b) 74.7 [A] c) 545.4 [A] (primary); 129.3 [A] (secondary)
5.14 By 0.953%
Chapter 6
6.1 The primary winding carries 0.358 [A]. The secondary winding carries 22.6 [A] in one section and 13.5 [A] in the other.
6.3 a) 12.0 [MW] (3-phase) b) 10.83 [MW] (3-phase)
6.4 Increase by 0.604%
6.7 a) 149.48 [kV] b) Sending end powers: 102.48 [MW], 17.85 [MVAr]. Receiving end
powers: 98.01 [MW],O [MV Ar].
6.8 a) 27.1 [A per phase] b) Line consumes 5.04 [kW] and generates 6.58 [MV Ar] c) I v2 1 = 141.19 [kV]
6.10 a) C = 106.1 [,uF per phase] b) 31.18 [kV]
6.13 The load flow will appear as follows:
~ 3 + j3.202 3 + j1.202~
.. 2 - jO.202 2 + jO.202
5 + j3 1 + j1
Figure Ans.1

442 Answers To Selected Exercises
6.15 The load flow will appear as follows:
~ 0 + j3.230
l 5 - jO.230
5 + j3
Figure Ans.2
Chapter 7
7.1 a) Maximum force occurs for S = 0 BLV
7.2
7.5
b) fmmax = R [N]
a) Maximum power occurs for s = ~ So
1 V2 b) P mmax - 4R
1 V2 c) Po = 4R d) Tf = 50%
1 V2 _ a
Pmmax - 4R a
6 + j1.020 ~
I 5 + jO.020
1 + jl
No. It would be overheated. For example, the motor in Example 7.8 would deliver 13.7 [kW] and dissipate an equal amount in ohmic heat. (Its normal heat losses are only 256 [W] according to Example 7.8.)
7.6 x = 2.193
7.7 a) e = 498.0 b) e = 523.0
[V]; ia = 9.30 [V]; ia = 9.86
[A] fA]
7.9 The motor will deliver 86.79 [kW] (116 [hp]) to the load. Operating efficiency = 84.67%. Shaft torque = 361 [N . m].
7.12 Rmin = 2.29 [0]. Generated power = 9l.56 [kW]. Diesel output =
105.55 [kW].
ChapterS
8.2 a) 3.17% b) 196.83% c) 156.8 [A per phase]

Answers To Selected Exercises 443
8.3 a) PI = 12.01 [kW] Pm = 10.64 [kW] Po = 1.37 [kW] Tm = 88.39 [N . m]
b) PI = -13.98 [kW] (delivers power to netvork) Pm = -15.86 [kW] (draws this power from prime mover) Po = 1.88 [kW] Tm = -121.2 [N· m] (instead of delivering torque to load, will now require torque from a prime mover to run at this speed)
c) PI = 27.33 [kW] Pm = -5.54 [kW] (needs power from prime mover) Po = 32.87 [kW] (With these losses the motor would burn up in a hurry. Note that 83.2% of this lost power is drawn from the network and 16.8% from prime mover.) Tm = -44.1 [N . m]
d) PI = 23.57 [kW] Pm = -11.99 [kW] Po. = 35.56 [kW] (see comment under part c) Tm =0
8.S Pm = 75.15 [kW] = 100.7 [hpJ 1111 = 107 [A per phase] cos f/J = 0.988 'YJ = 93.3% Tm=823 [N·m]
8.6 635 [A] (if 1M model is used); 646.5 [A] (if magnetization current is included)
8.7 Stator current = 111 [A per phase] Motor output power = 73.30 [kW] = 98 [hpJ Efficiency = 89.5% Power factor = 0.970
8.9 93.07 [kW]
8.11 Let the transformer series impedance be
[0 per phase].
(We neglect its magnetizing impedance.) Then the formula for maximum torque will be
T = 45 Ivl2 max 7Tns V(RI + RT)2 + (XI + X~ + XT)2 + RI + RT
where I vi is the primary transformer voltage (which we consider constant).

Alternating current comparison to direct current, 126 generation of, 90 in dc machine, 290
Amber, 53 Ammeter, 121,209 Arnortisseur, 186 Amplifier, 249 Apparent power, 134 Armature, 137
current, 296 reaction, 299 resistance, 295 winding, 287
Asynchronous machine, 335 Atomic lattice, 73 Automatic excitation control (AEC), 256 Automatic Load-Frequency Control
(ALFC),248 Autotransformers, 218 Average power, 127-130
Back emf, 279, 300 Balanced load, 245 Baseload, 13 Benjamin Franklin, 53 Boiling-water reactor (BWR), 45 Bound currents, 114 Boyle's law, 34 British thermal unit (Btu), 40 Brushless dc motor, 396 Bus, 241 Bushings, 214
Capacitance, 63 Capacitor-Start Motor, 379 Capacitor, 66 Carbon brushes, 281, 286, 287, 337 Centrifugal switch, 378 Chemical energy, 39 Chemical potential energy, 78 Chernobyl, 4 Cheval vapeur, 26 Circle Diagram: Induction machine, 345 Coercive intensity or force, 112 Cogging, 328, 397 Coil, 83
rotation, 90 Commutator, 287, 288, 396
INDEX
Compensation windings, 299 Complex algebra, 131 Complex power, 134 Computer disc drive, 392 Computer dispatched power, 251 Conductance, 73 Conjugate current, 134 Control rods, 45 Controlled-rectifier, 317 Cooling capacity, 280 Core losses, 185,205,297 Corona discharge, 59 Coulomb, 54 Coulomb's law, 54 Crawling, 328 Critical .mass, 45
Damper, 186 A-phase currents, 160 Dielectric constant of vacuum, 55 Differential equation, 81 "Digital" motor, 391 Diode, 315 Direct current
comparison to alternating current, 126 Direct current machine
back emf, 292 core losses, 297 equivalent circuit, 295 generator, 300 linear motor, 276 no-load speed, 278, 303, 306 prototype, 286-287 speed control of dc motor, 306 speed-torque characteristics, 302-308,
313-315 windage, brush and bearing friction, 297
Distribution network, 239 parameters, 252 transformers, 193
Drift velocity, 73 Dynamic braking, 302, 337
Eddy current, 185, 205 Effective or rms values, 130 Einstein's equation, 45 Electric
charge, 53 current, 70
445

446
Electric (cont.) energy storage, 13 field, 56 field intensity, E, 109 potential, 58 power network, 239 solar panels, 285 sources, 76 traction, 390
Electrical degrees, 139 Electromagnet, 286 Electromagnetic force law, 93 Electromagnetic induction, 86 Electromechanical torque, 163,288 Electromotive force (emf), 76 Electron, 53 Electrostatic energy, 56 Electrostatic force, 55 Elektron, 53 Elevators, 274 End rings, 326 Energy, 20 Entropy, 38 Equipotential, 59 Error detector, 398 Exciter, 137 Exponential growth, 6, 7, 15 Extra-high-voltage (EHV), 62
Farad [Fl, 63 Faraday's Law, 86,194 Fault conditions, 244 Ferromagnetism, 104 Ferrum, 104 Field coils, 108, 137 Filter, 318 Fission, 45 Forced cooling, 168,215 Fossil fuel, 2, II Fractional-horsepower motor, 365 Free electrons, 72 Frequency sensor-comparator, 249 Frequency error, 249 Full-wave Rectifier, 319 Fusion, 46
Gate, 317 Generating stations, 241 Generator
alternating current, 90, 135, 148
Index
direct current, 300 induction machine, 336
Geometric series, 147 Gravitation, 16
force, 17 Grid or power grid, 52, 169,222,239
loop structure, 241 radial structure, 241
Half-wave Rectifier, 318 Hall effect, 398 Harmonic analysis, 207 High-grade heat, 13, 39 Hoists, 274 Homo-Polar Machine, 281 Horse-power, 2, 5, 26 HVDC transmission, 129 Hybrid solar-electric energy, 47 Hydro-storage, 31 Hydrocarbon fossils, 3 Hydroelectric Power, 10 Hydroturbine, 274 Hysteresis, 205
losses, 185
Induced Electromotive Force, 76, 292 Induction machine
circle diagram, 346 equivalent circuit, 339 external rotor resistance, 361 generator, 336 modified circle diagram, 355 rotational losses, 329 rotor current referred to the stator, 344 speed-torque characteristics, 335 wound-rotor, 337 Y -6. starting method, 362
Infinite network bus, 186 Insulator strings, 252 Internal combustion engine (ICE), 274 Inverter, 390 Iron or core losses, 185 Isotopes, 54
louie, 4, 21 louIe's constant, 40
Kilo-calorie, 40 Kinetic energy, 2, 14,36,248 Kirchoff's Voltage Law (KVL), 100,295

Lagging phase angle, 129 Lamination, 138, 185,287 Lap winding, 289 Leading phase angle, 129 Leakage reactance, 208 Left-Hand-Rule, 94 Lenz's law, 86, 87, 329 Line current, 160
voltage, 154 voltage profile, 256
Linear induction motor, 386 Linear de motor, 276 Linked flux, 87 Load flow analysis, 250, 266 Load-frequency control (LFC), 244 Loss1ess elements, 129 Low grade heat, 12,39
Magnetic field, 81 field intensity, H, 110
Magnetic flux, 84 distribution, 291
Magnetic moment, 102 orbital moment, 113 saturation, 168, 188,310 spin moment, 113
Magnetization current, 202 curves, 110 impedance, 355 reactance, 203
Magnetohydrodynamic generators, 285 Magnetomotive force (rnrnf), 106 Mechanical degrees, 139 Moment of inertia, 37, 286 Multi-phase alternating current, 127 Mutual inductance, 97
Negative ion, 54 Neutral conductor 148 Neutrons, 53 Newton's law, 36 Nuclear energy, 44
fission 45 fusion 46 reaction, 13
Nuclear-powered generator, 190 Nucleus, 53 Numerical control machinery, 395
Index
Ohm's law, 73, 277 Ohm's Law for a magnetic circuit, 105 Ohmic power dissipation, 75 Open-loop control systems, 392 Optimum generation, 250 Optimum power dispatch, 250
Pantograph, 390 Peak load, 14 Peaking generator, 31
power, 14 Pelton turbine, 28, 74 Periodic wave, 91 Periodic Table of Elements, 104 Permanent magnet, 121,286,329,392,396 Permeability, 194,341,354
of vacuum, 83 Phase current, 157 Phase sequence, 148, 152, 171 Phase voltage, 154 Phase-to--ground voltage, 154 Phase-to-phase or line voltage, 154 Phasor diagram, 130 Phasor representation, 129 Positive ions, 53 Potential energy, 10, 22 Power angle, 3, 176,258 Power grid or grid 52, 169,222,239 Power demand, 246
stations, 239 transmission, 75
Power or rate of energy, 25 Pressurized-water reactor (PWR), 45 Primary winding, 193, 216 Protons, 53
Radioactive leaks, 13 Reactive loads, 246 Reactive power, 130 Real power, 130 Rectifier circuits, 316-322
447
Regenerative braking, 30, 280, 302, 336-337 Relative permeability, 105 Reluctance, 106, 381
torque, 117 Residual flux, 311
flux density, 112 magnetism, 114
Resistance, 74 Resistance split-phase motor, 378

448
Resistivity, 74, 191 Right-hand rule, 82 Right-hand screw, 103 Road vehicles, 274 Robotics, 392 Rotational Loss, 297, 329
Saliency effect, 185 Salient rotor, 139,381 Satellite dish antenna, 392 Seebeck effect, 39 Self-inductance, 98 Separately excited dc machine, 295, 302 Series--excited dc machine, 313 Servo systems, 395 Servomechanisms, 398 Shaded-pole motor, 380 Shaft power, 297 Sheet current, 331 Shunt dc motor, 305-306 Shunt dc generator, 309-312 SI unit system, 16 Single-phase
ac generator, 135 ac power, 129 current, 127 transformer, 193
Slip, 329, 333 Slip frequency, 343 Slip rings, 337, 382 Slots, 137 Solar energy, 46 Solar --electric cells, 9 Sparkover, 299 Squirrel---<:age motor, 326, 340 Stall,336 Standard surface gravity, 20 Standstill, 300, 330, 334
torque, 352 Starter
winding, 377 compensator, 361 resistor, 277, 300
Stator, 135, 287, 326 flux wave, 328
Stepper motor, 391 Stray Loss, 297 Sub-synchronousspeed,365 Super-flywheels, 37 Superconducting magnets, 14
Index
Supercooling, 168 Surface current density, 166 Surface or "sheet" current, 164 Switching stations, 241 Synchronization, 156, 171
coefficient, 260 Synchronous machine, 135
balanced loading, 156 condenser, 169 distribution effects, 145 field---<:urrent control, 176 impedance, 177 inductor, 169 machine control, 174 overexcitation, 176 pull-out power, 181 reactance, 178 reaction torque, 163 speed,335 stator current wave, 164 three-phase winding design, 151 underexcitation, 176
Synchro, 398
Tesla [T], 83 Thermal energy, 38 Thermodynamics, 4, 29, 38
nonreversible transformation, 39 reversible transformation, 39
Third harmonic current in transformers, 224
Three-Mile Island, 4 Three-phase transformer
power, 219 three-phase core, 223
Three-phase generator or synchronous machine, 148 rectifier, 321 power system, 127
Thunderstorm, 68 Thyristors, 315 Time---<:onstant, 81 Timing diagram, 395 Toroid,82
coils, 96 Torque, 94
reluctance, 117,381 Transformer
/l-Y Connection, 223 ideal,193

impedance, 199 laminations, 213 open-circuit (OC) test, 209 power, 198 primary winding, 193,216 ratings, 215 turns ratio, 194, 399 secondary winding, 193,216 secondary current referred to the
primary, 200 secondary voltage referred to the
primary, 200 short-circuit (SC) test, 209 step--down, 218 step-up, 218 tertiary winding, 193,216 voltage-per-turn (VTP), 195
Transistors, 315 Transmission line
collapse, 259 electrically short line, 252 power limit, 259 line parameters, 252 links, 239 loop structure, 241
Index
loss, 76 load characteristics, 245 network, 239 reactive line power, 261 real line power, 257 voltage, 76 radial structure, 241
Unbalanced grid loading, 246 Underground cables, 252 Universal gravitational constant, 17 Universal motor, 315, 365 Uranium isotope U-235, 45
Vector cross product, 94 Viscous damper, 42 Volt [V], 58 Volt-amperes reactive (V Ar), 131 Voltage profile, 261, 256
Waterwheel,2, 17 Windage friction, 297
Y -connected 3-phase generator, 148, 156 Y-Y connected transfonner, 221
449

















![Presentation ABB Phasor [Recovered]](https://img.pdfslide.us/doc/110x75/55cf8527550346484b8b5387/presentation-abb-phasor-recovered.jpg)