Embed Size (px)
Citation preview

International Journal of Engineering Trends and Technology (IJETT) – Special Issue – April 2017
ISSN: 2231-5381 http://www.ijettjournal.org Page 240
Performance Calibration of Photogrammetic Optical
Systems T. Saikanth1, R.S. Chandrasekhar2, B.Venu gopal Rreddy
2 ,V. Punna Rao1, C. Gireesh1, Pamidighantam V. Ramana1
1Vasavi College of Engineering, Ibrahimbagh, Hyderabad 500 031.
2Research CentreImarat, Vignyakancha, Hyderabad 500 058.
Abstract: The performance of a digital optical imaging system
with a CCD sensor depends on the precision of the optical elements
in the design and assembly. The lens fabrication and assembly
introduces offset and misalignment between mechanical and optical
axis. A precise analysis and experimental estimation of optical
system parameter errors can be used to improve the image quality
through software algorithms. In this manuscript, we report our work
about a method to measure optical system parameters like principal
point, focal length, and distortion etc of optical imager using
Simulation Tools, Open CV and an Autocollimator Theodolite. These
parameters are very crucial for the synthetic error analysis of digital
optical imaging system. The calibration experiments result in
estimation of optical performance parameters, which are used to
develop image enhancement algorithms. The parameters are
extracted from a set of image templates using different methods. In
part I, we present the calibration analysis and in part II, the
experiment results are presented that show excellent agreement with
the calibration model.
Keywords: Photogrammetic , Principal point, Focal length,
Distortion, OpenCV, Autocollimator Theodolite, MATLAB.
I. INTRODUCTION
Imager calibration is used to determine intrinsic and
extrinsic parameters for imaging systems, but it is also used to
determine the complete lens distortion model. The intrinsic
parameters include focal length, principal point, skew
coefficient, distortions. The extrinsic parameters can include
the rotation matrix and translation vector between the imager
coordinate system and the world coordinate system. Imager
calibration has been studied extensively in computer vision
and photogrammetry, and even recently new techniques have
been proposed. In the first part, we presented the theoretical
analyasis of optical parameters using pin hole imager model.
In the present part, we describe the experimental results.
1.1. Types of parameters: Two types of parameters need to be
recovered are
Intrinsic imager parameters
Extrinsic imager parameters
Intrinsic imager parameters: These are the parameters that
characterize the optical, geometric, and digital characteristics
of the imager
Effective focal length f.
The transformation between image planes
coordinates and pixel coordinates.
The geometric distortion introduced by the optics.
Extrinsic imager parameters: These are the parameters that
identify uniquely the transformation between the unknown
imager reference frame and the known world reference frame.
1) Finding the translation vector between the relative
positions of the origins of the two reference frames.
2) Finding the rotation matrix that brings the corresponding
axes of the two frames into alignment.
Recently, many calibration methods were compared and
described. Most of them were based on Tsai, Heikkila &
Silven or Zhang methods [1] [2]. All three methods are based
on the pinhole camera model and include radial distortion
models.
Zhang’s method uses a checkerboard pattern, which is
placed in front of the camera. At least three different images in
various angles and positions must be acquired for the
computation of camera calibration model. After the
acquisition of the images the algorithms for detection of
corners are used and corners of the checkerboard pattern are
extracted. These points are used in calculations for camera
calibration. This method is also used in OpenCV and Camera
calibration.
Imager Calibration: The imager calibration is implemented
by 3D reference object based calibration. Before the
calibration it is necessary to adjust the 3D scanning system. It
must be set to cover the whole scanning area. This means
determining the position of the imager, zoom and focus on the
scanning surface. It is necessary to use appropriate calibration
objects, patterns or shapes. These patterns are then used in the
calculations of intrinsic and extrinsic parameters of the system
based on images acquired by the digital imager. The most
commonly used is the checkerboard pattern and Asymmetric
pattern Fig. 1.1. This pattern is printed on a solid flat surface
and has predefined dimensions and parameters (for example.
checkerboard pattern of 6x6 squares and 20x20mm size each).
Fig.1.1. Standard imager calibration patterns
II. MATLAB CALIBRATION TOOL BOX
Imager calibration toolbox is a robust tool in the
mathematical computing environment of MATLAB, which
allows us to calibrate the imagers of the optical based 3D
scanning systems. It represents a fundamental building block
that can be extended to cover the overall calibration of the 3D
scanning system.
The procedure involves
grabbing a set of images of the grid pattern
International Journal of Engineering Trends and Technology (IJETT) – Special Issue – April 2017
ISSN: 2231-5381 http://www.ijettjournal.org Page 241
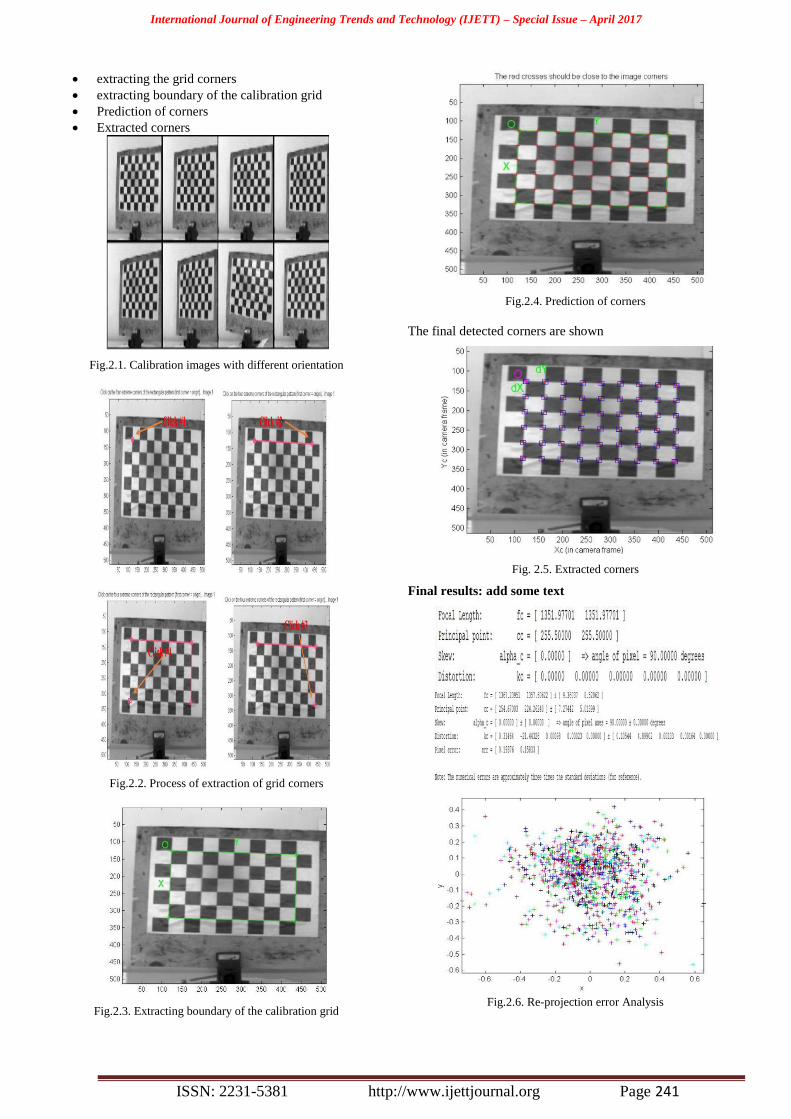
extracting the grid corners
extracting boundary of the calibration grid
Prediction of corners
Extracted corners
Fig.2.1. Calibration images with different orientation
Fig.2.2. Process of extraction of grid corners
Fig.2.3. Extracting boundary of the calibration grid
Fig.2.4. Prediction of corners
The final detected corners are shown
Fig. 2.5. Extracted corners
Final results: add some text
Fig.2.6. Re-projection error Analysis
International Journal of Engineering Trends and Technology (IJETT) – Special Issue – April 2017
ISSN: 2231-5381 http://www.ijettjournal.org Page 242
Disadvantages
The main disadvantage of camera calibration toolbox
is the need of carrying out certain steps manually
(especially in comparison with fully automated
calibration method via OpenCV), Thereby extending
the time of calibration.
The most time consuming is the determination of
borders of calibration pattern. Because in every
calibration image (there are normally more than 20
images) it is necessary to define four border points as
we done in section of “Extract the grid corners”.
It is necessary to manually enter some configuration
parameters and also confirm and execute individual
calibration steps.
The another main disadvantage is matlab tool box
wouldn’t work for the asymmetric pattern which is
most accurate pattern to compute the calibration
process, as it would be done by centroiding of circles,
whereas chessboard pattern will be done by corners
extraction of squares.
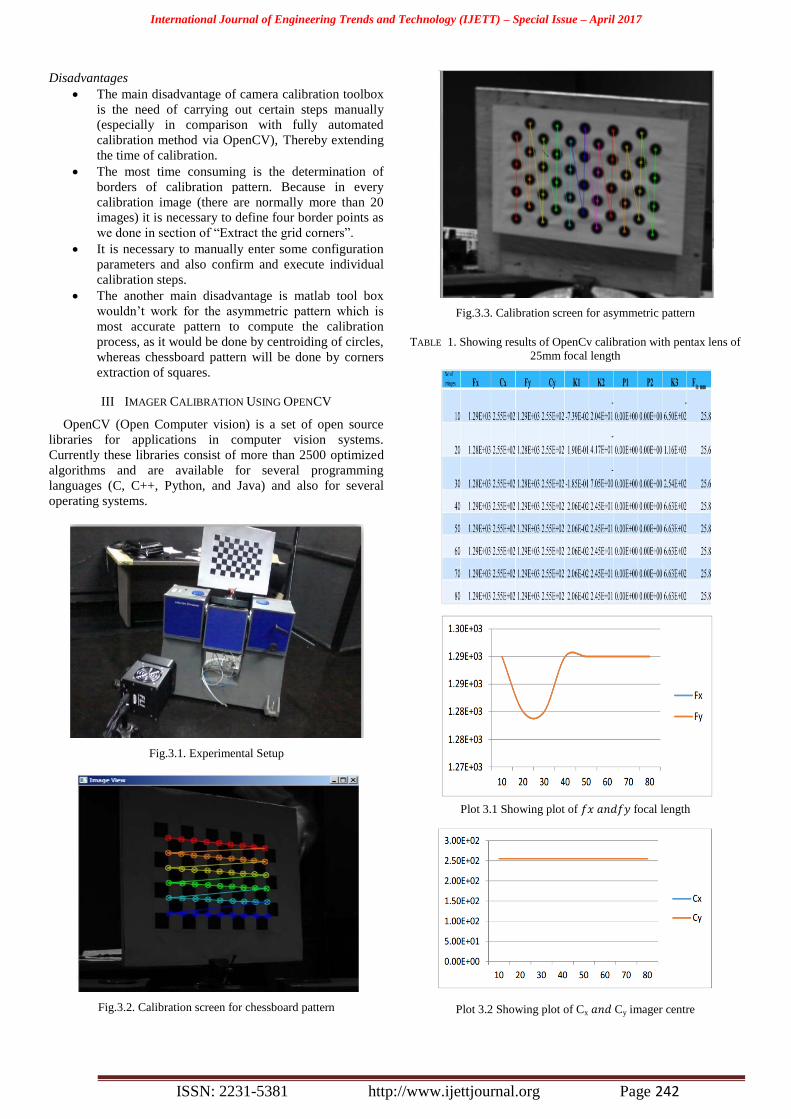
III IMAGER CALIBRATION USING OPENCV
OpenCV (Open Computer vision) is a set of open source
libraries for applications in computer vision systems.
Currently these libraries consist of more than 2500 optimized
algorithms and are available for several programming
languages (C, C++, Python, and Java) and also for several
operating systems.
Fig.3.1. Experimental Setup
Fig.3.2. Calibration screen for chessboard pattern
Fig.3.3. Calibration screen for asymmetric pattern
TABLE 1. Showing results of OpenCv calibration with pentax lens of
25mm focal length
Plot 3.1 Showing plot of 𝑓𝑥 𝑎𝑛𝑑𝑓𝑦 focal length
Plot 3.2 Showing plot of Cx 𝑎𝑛𝑑 Cy imager centre
International Journal of Engineering Trends and Technology (IJETT) – Special Issue – April 2017
ISSN: 2231-5381 http://www.ijettjournal.org Page 243
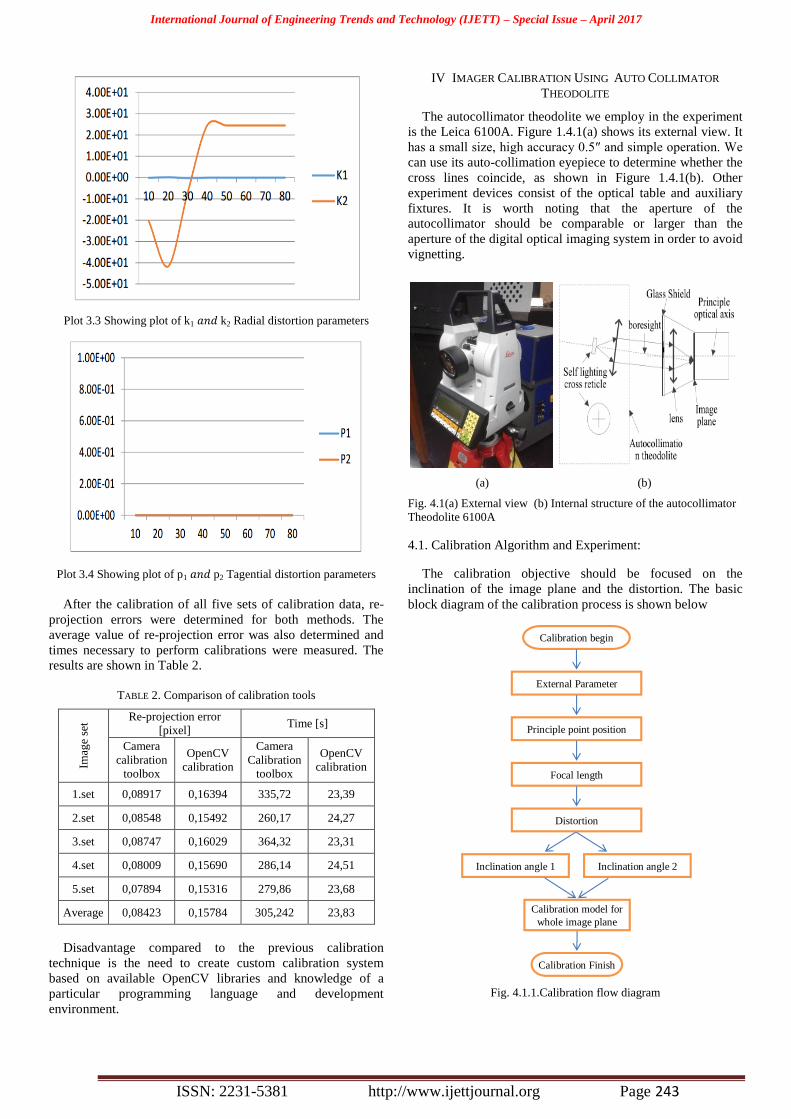
Plot 3.3 Showing plot of k1 𝑎𝑛𝑑 k2 Radial distortion parameters
Plot 3.4 Showing plot of p1 𝑎𝑛𝑑 p2 Tagential distortion parameters
After the calibration of all five sets of calibration data, re-
projection errors were determined for both methods. The
average value of re-projection error was also determined and
times necessary to perform calibrations were measured. The
results are shown in Table 2.
TABLE 2. Comparison of calibration tools
Imag
e se
t
Re-projection error
[pixel] Time [s]
Camera
calibration
toolbox
OpenCV
calibration
Camera
Calibration
toolbox
OpenCV
calibration
1.set 0,08917 0,16394 335,72 23,39
2.set 0,08548 0,15492 260,17 24,27
3.set 0,08747 0,16029 364,32 23,31
4.set 0,08009 0,15690 286,14 24,51
5.set 0,07894 0,15316 279,86 23,68
Average 0,08423 0,15784 305,242 23,83
Disadvantage compared to the previous calibration
technique is the need to create custom calibration system
based on available OpenCV libraries and knowledge of a
particular programming language and development
environment.
IV IMAGER CALIBRATION USING AUTO COLLIMATOR
THEODOLITE
The autocollimator theodolite we employ in the experiment
is the Leica 6100A. Figure 1.4.1(a) shows its external view. It
has a small size, high accuracy 0.5″ and simple operation. We
can use its auto-collimation eyepiece to determine whether the
cross lines coincide, as shown in Figure 1.4.1(b). Other
experiment devices consist of the optical table and auxiliary
fixtures. It is worth noting that the aperture of the
autocollimator should be comparable or larger than the
aperture of the digital optical imaging system in order to avoid
vignetting.
(a) (b)
Fig. 4.1(a) External view (b) Internal structure of the autocollimator
Theodolite 6100A
4.1. Calibration Algorithm and Experiment:
The calibration objective should be focused on the
inclination of the image plane and the distortion. The basic
block diagram of the calibration process is shown below
Fig. 4.1.1.Calibration flow diagram
Calibration begin
External Parameter
Principle point position
Focal length
Distortion
Inclination angle 1 Inclination angle 2
Calibration model for
whole image plane
Calibration Finish
International Journal of Engineering Trends and Technology (IJETT) – Special Issue – April 2017
ISSN: 2231-5381 http://www.ijettjournal.org Page 244
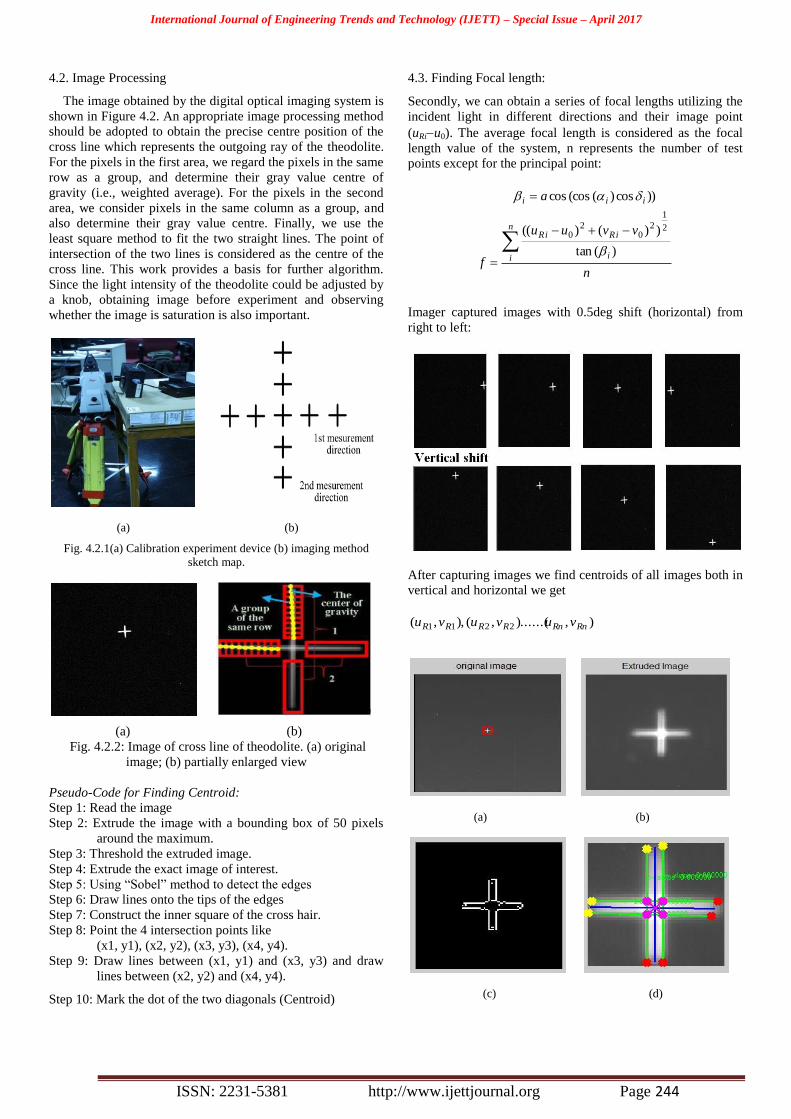
4.2. Image Processing
The image obtained by the digital optical imaging system is
shown in Figure 4.2. An appropriate image processing method
should be adopted to obtain the precise centre position of the
cross line which represents the outgoing ray of the theodolite.
For the pixels in the first area, we regard the pixels in the same
row as a group, and determine their gray value centre of
gravity (i.e., weighted average). For the pixels in the second
area, we consider pixels in the same column as a group, and
also determine their gray value centre. Finally, we use the
least square method to fit the two straight lines. The point of
intersection of the two lines is considered as the centre of the
cross line. This work provides a basis for further algorithm.
Since the light intensity of the theodolite could be adjusted by
a knob, obtaining image before experiment and observing
whether the image is saturation is also important.
(a) (b)
Fig. 4.2.1(a) Calibration experiment device (b) imaging method
sketch map.
(a) (b)
Fig. 4.2.2: Image of cross line of theodolite. (a) original
image; (b) partially enlarged view
Pseudo-Code for Finding Centroid:
Step 1: Read the image
Step 2: Extrude the image with a bounding box of 50 pixels
around the maximum.
Step 3: Threshold the extruded image.
Step 4: Extrude the exact image of interest.
Step 5: Using “Sobel” method to detect the edges
Step 6: Draw lines onto the tips of the edges
Step 7: Construct the inner square of the cross hair.
Step 8: Point the 4 intersection points like
(x1, y1), (x2, y2), (x3, y3), (x4, y4).
Step 9: Draw lines between (x1, y1) and (x3, y3) and draw
lines between (x2, y2) and (x4, y4).
Step 10: Mark the dot of the two diagonals (Centroid)
4.3. Finding Focal length:
Secondly, we can obtain a series of focal lengths utilizing the
incident light in different directions and their image point
(uRiu0). The average focal length is considered as the focal
length value of the system, n represents the number of test
points except for the principal point:
n
vvuu
f
a
n
i i
iRiR
iii
)(tan
))()((
))cos)((coscos
2
1
20
20
Imager captured images with 0.5deg shift (horizontal) from
right to left:
After capturing images we find centroids of all images both in
vertical and horizontal we get
),)......(,(),,( 2211 RnRnRRRR vuvuvu
(a) (b)
(c) (d)
International Journal of Engineering Trends and Technology (IJETT) – Special Issue – April 2017
ISSN: 2231-5381 http://www.ijettjournal.org Page 245
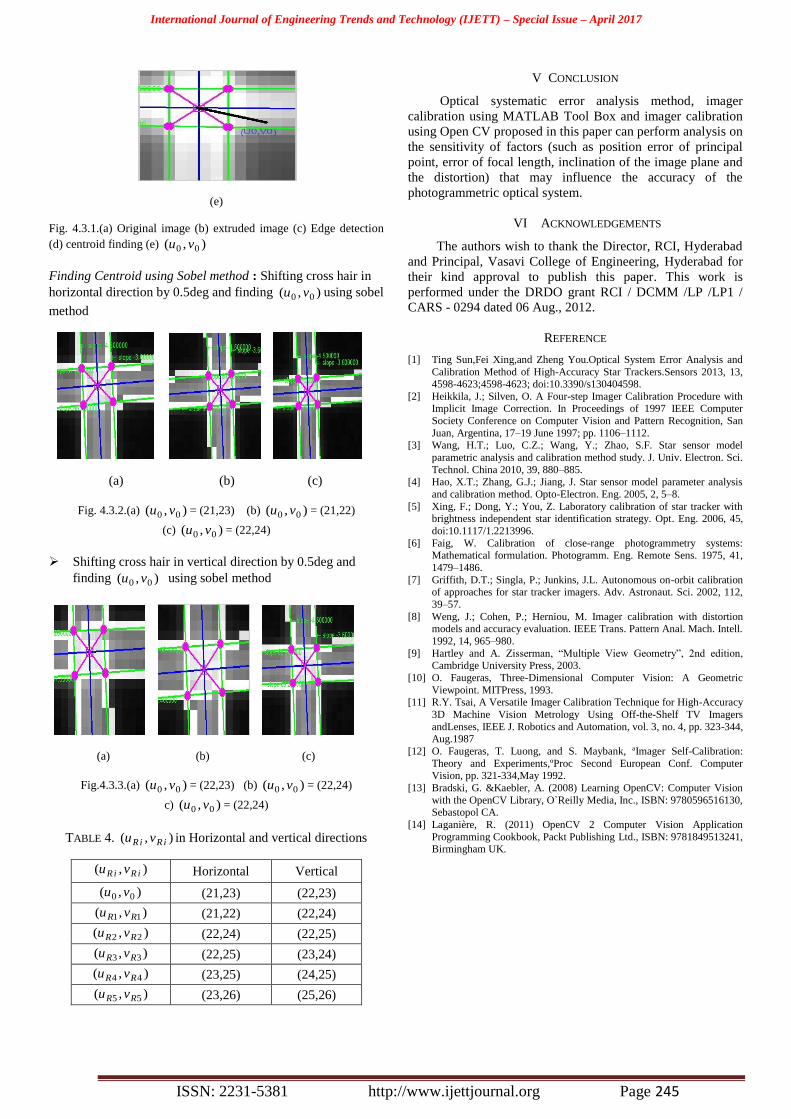
(e)
Fig. 4.3.1.(a) Original image (b) extruded image (c) Edge detection
(d) centroid finding (e) ),( 00 vu
Finding Centroid using Sobel method : Shifting cross hair in
horizontal direction by 0.5deg and finding ),( 00 vu using sobel
method
(a) (b) (c)
Fig. 4.3.2.(a) ),( 00 vu = (21,23) (b) ),( 00 vu = (21,22)
(c) ),( 00 vu = (22,24)
Shifting cross hair in vertical direction by 0.5deg and
finding ),( 00 vu using sobel method
(a) (b) (c)
Fig.4.3.3.(a) ),( 00 vu = (22,23) (b) ),( 00 vu = (22,24)
c) ),( 00 vu = (22,24)
TABLE 4. ),( iRiR vu in Horizontal and vertical directions
),( iRiR vu Horizontal Vertical
),( 00 vu (21,23) (22,23)
),( 11 RR vu (21,22) (22,24)
),( 22 RR vu (22,24) (22,25)
),( 33 RR vu (22,25) (23,24)
),( 44 RR vu (23,25) (24,25)
),( 55 RR vu (23,26) (25,26)
V CONCLUSION
Optical systematic error analysis method, imager
calibration using MATLAB Tool Box and imager calibration
using Open CV proposed in this paper can perform analysis on
the sensitivity of factors (such as position error of principal
point, error of focal length, inclination of the image plane and
the distortion) that may influence the accuracy of the
photogrammetric optical system.
VI ACKNOWLEDGEMENTS
The authors wish to thank the Director, RCI, Hyderabad
and Principal, Vasavi College of Engineering, Hyderabad for
their kind approval to publish this paper. This work is
performed under the DRDO grant RCI / DCMM /LP /LP1 /
CARS - 0294 dated 06 Aug., 2012.
REFERENCE
[1] Ting Sun,Fei Xing,and Zheng You.Optical System Error Analysis and
Calibration Method of High-Accuracy Star Trackers.Sensors 2013, 13, 4598-4623;4598-4623; doi:10.3390/s130404598.
[2] Heikkila, J.; Silven, O. A Four-step Imager Calibration Procedure with Implicit Image Correction. In Proceedings of 1997 IEEE Computer
Society Conference on Computer Vision and Pattern Recognition, San
Juan, Argentina, 17–19 June 1997; pp. 1106–1112. [3] Wang, H.T.; Luo, C.Z.; Wang, Y.; Zhao, S.F. Star sensor model
parametric analysis and calibration method study. J. Univ. Electron. Sci.
Technol. China 2010, 39, 880–885. [4] Hao, X.T.; Zhang, G.J.; Jiang, J. Star sensor model parameter analysis
and calibration method. Opto-Electron. Eng. 2005, 2, 5–8.
[5] Xing, F.; Dong, Y.; You, Z. Laboratory calibration of star tracker with brightness independent star identification strategy. Opt. Eng. 2006, 45,
doi:10.1117/1.2213996.
[6] Faig, W. Calibration of close-range photogrammetry systems: Mathematical formulation. Photogramm. Eng. Remote Sens. 1975, 41,
1479–1486.
[7] Griffith, D.T.; Singla, P.; Junkins, J.L. Autonomous on-orbit calibration of approaches for star tracker imagers. Adv. Astronaut. Sci. 2002, 112,
39–57.
[8] Weng, J.; Cohen, P.; Herniou, M. Imager calibration with distortion models and accuracy evaluation. IEEE Trans. Pattern Anal. Mach. Intell.
1992, 14, 965–980.
[9] Hartley and A. Zisserman, “Multiple View Geometry”, 2nd edition, Cambridge University Press, 2003.
[10] O. Faugeras, Three-Dimensional Computer Vision: A Geometric
Viewpoint. MITPress, 1993. [11] R.Y. Tsai, A Versatile Imager Calibration Technique for High-Accuracy
3D Machine Vision Metrology Using Off-the-Shelf TV Imagers
andLenses, IEEE J. Robotics and Automation, vol. 3, no. 4, pp. 323-344, Aug.1987
[12] O. Faugeras, T. Luong, and S. Maybank, ªImager Self-Calibration:
Theory and Experiments,ºProc Second European Conf. Computer Vision, pp. 321-334,May 1992.
[13] Bradski, G. &Kaebler, A. (2008) Learning OpenCV: Computer Vision
with the OpenCV Library, O`Reilly Media, Inc., ISBN: 9780596516130, Sebastopol CA.
[14] Laganière, R. (2011) OpenCV 2 Computer Vision Application
Programming Cookbook, Packt Publishing Ltd., ISBN: 9781849513241, Birmingham UK.