Embed Size (px)
Citation preview

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 1/44
Selected Topics in ControlsDr. Muhammad Bilal Kadri

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 2/44
Controller Design SpecificationsTime Domaina) Maximum Overshootb) Rise Time
c) Settling Timed) Steady State AccuracyFrequency Domaina) Gain Margin
b) Phase Marginc) M r d) Bandwidth

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 3/44
Some History� Historically the design of linear control systems
was developed with a wealth of graphical toolssuch as Bode, Nyquist, Nichols chart etc.
� The advantage of these tools is that they can allbe sketched by following approximation methodswithout detailed plotting.
� High order systems do not pose any problem.� Design in time domain using rise time, settling
time etc is possible analytically only for secondorder systems. General design procedures usingtime domain specifications are difficult toestablish for system with order higher than thesecond.

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 4/44
Contd..
� With the help of software time domaindesign has become much easier.
� The design specifications are generallygiven in time domain rather than frequencydomain.

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 5/44
Controller Configuration� The design objective is to have the controlled
variables represented by the output vector y(t)behave in certain desirable way.
� The problem essentially involves thedetermination of the control signal u(t) over theprescribed time interval so that the designobjectives are satisfied.
� Most of the conventional design methods rely on
the so called µfixed configuration design¶.� The problem then involves the design of theelements of the controller.

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 6/44
Contd..
a) Series (Cascade) compensation (1D)b) Feedback Compensation (1D)
c) State feedback compensation (1D)The disadvantage with one degree of freedom controller is that the
performance criteria that can be realized are limited.
a) Series feedback compensation (2D)b) Feedforward compensation (2D)

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 7/44

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 8/44
PD Controller

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 9/44
Contd..
� PD control is equivalent to adding a simplezero at s=-K P /KD
2
2
( )( 2 )
( )( )
( )( 2 )
n p
n
c P D
n p D
n
G s s s
G s K K s K K s
G s s s
[ ^[
[
\[
!
!
!

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 10/44
Time Domain Interpretation

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 11/44
Contd..

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 12/44
Contd..

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 13/44
Contd..

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 14/44
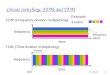
Frequency Domain Interpretation� The bode plot is shown on the next slide.
� The high pass characteristics of the PD are easily shownon the Bode plot.� The magnitude characteristic of the PD push the gain
crossover frequency to a higher value.� The design principle of the PD controller involves the
placing of the corner frequency of the controller,=Kp/K D such that an effective improvement of the
phase margin is realized at the new gain crossover frequency.
� Due to the high pass characteristic in most cases it willincrease the BW of the system and reduce the rise timeof the step response.
� The practical disadvantage of the PD controller is thedifferentiator portion which usually accentuates any highfrequency noise that enters at the input.

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 15/44

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 16/44
Summary of Effects of PD Control
1. Improving damping and reducingmaximum overshoot.
2. Reducing rise time and settling time3. Improving GM, PM, Mr.4. Increasing BW.
5. Possibly accentuating noise at higher frequencies.

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 17/44
Example 1

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 18/44

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 19/44
Contd..

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 20/44
Contd..

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 21/44

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 22/44
Contd..

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 23/44

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 24/44
Step Response

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 25/44
Summary

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 26/44
Alternate Procedure

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 27/44
Kp VS K D

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 28/44
Frequency Domain
damped system. Let us give the following performance criteria:Steady State Error due to ramp <=0..0043
PM>=80Mr<=1.05
BW<=200 rad/sec

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 29/44

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 30/44
Contd..

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 31/44
Summary

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 32/44
Assignment # 3
� These questions are from 9 th edition whichis available in pdf.
� 9.1,9.3,9.4,9.5,9.6,9.7,9.9,9.10,9.14� Solve 9.9 In the class and submit it as aclass assignment.

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 33/44
Example # 2

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 34/44

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 35/44

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 36/44

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 37/44

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 38/44
Conclusions

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 39/44

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 40/44
Frequency Domain Design

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 41/44

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 42/44

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 43/44

8/7/2019 (PD Time & Frequency)
http://slidepdf.com/reader/full/pd-time-frequency 44/44