Embed Size (px)
Citation preview

PARTIAL DIFFERENTIAL EQUATIONS
I Introduction
An equation containing partial derivatives of a function of two or more independent
variables is called a partial differential equation (PDE).
e.g. y2∂u
∂x+
∂u
∂y= u where u(x, y) is the unknown function.
For convenience we denote
ux =∂u
∂x, uxx =
∂2u
∂x2, uxy =
∂2u
∂x∂y, etc.
so that the above PDE can be written y2ux + uy = u. The order of the PDE is the
order of the highest partial derivative. A PDE whose unknown function and its
partial derivatives appear linearly in the equation is said to be linear. For example,
A(x, y)uxx +B(x, y)uxy + C(x, y)uyy +D(x, y)ux +E(x, y)uy + F (x, y)u = G(x, y)
which is the general form of second-order linear PDE. If each term in the PDE contains
either the dependent variable or one of its derivatives, i.e., G(x, y) = 0, then it is said
to be homogeneous, otherwise it is nonhomogeneous.

2
Examples
1. ut = c2uxx 1 dimensional heat conduction equation
2. utt = c2uxx 1 dimensional wave equation
3. uxx + uyy = 0 2 dimensional Laplace equation
4. uxx + uyy = f(x, y) 2 dimensional Poisson equation
5. uxx + uyy =1
c2utt − λ2u 2 dimensional Klein-Gordon equation
6. utt = c2(uxx + uyy + uzz) 3 dimensional wave equation
In general, the solution of PDE presents a much more difficult problem than
the solution of ODE and except for certain special types of linear PDE, no general
method of solution is available. It is remarkable and fortunate that a large number
of the important equations in practice are not only linear, but also of second order,
for which solutions are relatively easy to find.
A solution of a PDE in some region R of the space of the independent variables
is a function that has all the partial derivatives appearing in the equation in some
domain containing R, and satisfies the equation everywhere in R.
In general, the totality of solutions of a PDE is very large.
Example. The functions
(i) u = x3 − 3xy2 (ii) u = sinx cosh y
(iii) u = ln(x2 + y2) (iv) u = tan−1³yx
´are all solutions of the 2 dimensional Laplace equation uxx + uyy = 0, altough they
are entirely different from each other.
The Heat Equation (Diffusion equation) 3
Theorem
(i) If u1 and u2 are two solutions of a linear homogeneous PDE in some region,
then u = k1u1+ k2u2 is also a solution of the PDE in that region, where k1 and
k2 are constants.
(ii) u ≡ 0 is always a solution of a linear homogeneous PDE.
Proof Trivial.
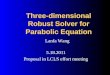
II The Heat Equation (Diffusion equation)
Consider a thin metal rod with cross-section area A. Assume that the lateral surface
is wrapped with insulation such that heat conducts along the x-direction only.
x 0x
L
x∆
Figure 1
Let u(x, t) denote the temperature at position x, at time t.
Newton’s law of cooling (Fourier’s law) =⇒ the quantity of heat (flux) flowing across
x0 per unit time is proportional to the temperature gradient at x0.
Therefore Qx0 = −kAux(x0, t) where k is the thermal conductivity of the metal.
The quantity of heat loss along a small segment [x0, x0 +4x] per unit time is given
byH = Qx0 −Qx0+4x = kA [ux(x0 +4x, t)− ux(x0, t)] .

4
The average change in temperature 4u in the time interval 4t is proportional to the
amount of heat loss and inversely proportional to the mass 4m of the element.
Therefore 4u =H4t
s4m, where s is the specific heat of the metal. This gives
4u
4t=
kA [ux(x0 +4x, t)− ux(x0, t)]
sρA4x
=k
sρ
[ux(x0 +4x, t)− ux(x0, t)]
4x−→ k
sρuxx(x0, t) as 4x→ 0.
On the other hand, 4x→ 0 =⇒ 4t→ 0 =⇒ 4u
4t→ ut(x0, t), therefore
ut(x, t) =k
sρuxx(x0, t) =⇒ ut = c2uxx
where c2 =k
sρis called the thermal diffusivity of the material (note that k, s, ρ are
all properties of the material and are all positive).
Note If heat is added or removed from the rod, then the equation becomes ut =
c2uxx+f(x, t) which is nonhomogeneous and f(x, t) is the heat source or sink density.
Suppose that the ends x = 0 and x = L of the rod are kept at temperatures T0 and
T1, and the initial temperature distribution of the rod is f(x), then the boundary
conditions (B.C.) are u(0, t) = T0 and u(L, t) = T1, while the initial condition (I.C.)
is u(x, 0) = f(x).
The problem becomes an initial boundary value problem (IBVP):
ut = c2uxx; 0 < x < L, 0 < t <∞,
B.C.
u(0, t) = T0,
u(L, t) = T1,
0 < t <∞,
I.C. u(x, 0) = f(x), 0 < x < L.

The Heat Equation (Diffusion equation) 5
Separation of Variables
As the heat equation is linear and homogeneous, the approach is to seek solu-
tions of the differential equation and boundary conditions and then superposing them
to satisfy the initial conditions. First we solve the PDE ut = c2uxx by a method
known as seperation of variables. Assume u(x, t) = X(x)T (t). Then
ut = XT 0 and uxx = X 00T,
hence ut = c2uxx =⇒ XT 0 = c2X 00T =⇒ T 0
c2T=
X 00
X.
As the L.H.S. is a function of t only and the R.H.S. is a function of x only,
T 0
c2T=
X 00
X= −λ, where λ is some constant.
Hence T 0 + λc2T = 0 =⇒ T = e−λc
2t
X 00 + λX = 0
and there are three cases for the solution of X:
(i) λ = 0 =⇒ X 00 = 0 =⇒ X = α+ βx.
(ii) λ < 0 (let λ = −k2) =⇒ X 00 − k2X = 0 =⇒ X = αekx + βe−kx.
(iii) λ > 0 (let λ = k2) =⇒ X 00 + k2X = 0 =⇒ X = α cos kx+ β sin kx.
Therefore,
u =
α+ βx if λ = 0,
e−k2c2t(αekx + βe−kx) if λ = −k2 < 0,
e−k2c2t(α cos kx+ β sin kx) if λ = k2 > 0.

6
Note that α, β and λ (or k) are arbitrary in the above solution, whose values
will be determined by the boundary and initial conditions, which depend on the type
of such conditions. Consider the following homogeneous boundary conditions:
B.C.
a1u(0, t) + a2ux(0, t) = 0, (a1, a2) 6= (0, 0)
a3u(L, t) + a4ux(L, t) = 0, (a3, a4) 6= (0, 0); t > 0,
and the initial condition: I.C. u(x, 0) = f(x), 0 ≤ x ≤ L.
A PDE together with the initial and boundary conditions is called an IBV P
(Initial Boundary Value Problem).
We now discuss how to find the solution to the IBVP for the heat equation
with different cases of (a1, a2, a3, a4).
Case I ut = c2uxx; 0 < x < L, 0 < t <∞.
B.C.
u(0, t) = 0,
u(L, t) = 0,
0 < t <∞,
i.e., (a1, a2) = (1, 0)(a3, a4) = (1, 0)
I.C. u(x, 0) = f(x), 0 < x < L.
(i) λ = 0 =⇒ u = α+ βx
u(0, t) = u(L, t) = 0 =⇒ α = β = 0 =⇒ u ≡ 0 (trivial solution).(ii) λ < 0 =⇒ u = e−k
2c2t(αekx + βe−kx) (λ = −k2),
u(0, t) = 0 =⇒ α+ β = 0, u(L, t) = 0 =⇒ αekx + βe−kx = 0.
Therefore α = β = 0 =⇒ u ≡ 0 (trivial solution)
(iii) λ > 0 =⇒ u = e−k2c2t(α cos kx+ β sin kx) (λ = k2),
u(0, t) = 0 =⇒ α = 0, u(L, t) = 0 =⇒ β sin kL = 0.

The Heat Equation (Diffusion equation) 7
To get non-trivial solution, we must keep β 6= 0, hence sin kL = 0 =⇒ k =nπ
L=⇒
λ = k2 =³nπL
´2, n = 1, 2, · · · . Thus for each n = 1, 2, · · · ,
un = βne−(nπ/L)2c2t sin
nπx
L
is a solution of the PDE which satisfies the B.C.
Note. λn =³nπL
´2are called the eigenvalues and the corresponding un the
eigenfunctions of the IBVP problem. Hence an eigenfunction is a solution to the
PDE which satisfies the boundary conditions, but not the initial condition in general.
In order to satisfy the initial condition, we add all un together (known as the
principle of superposition):
u(x, t) =∞Xn=1
un =∞Xn=1
βne−(nπ/L)2c2t sin
nπx
L
and then determine βn so that the initial condition is satisfied.
I.C. u(x, 0) = f(x) =⇒
f(x) =∞Xn=1
βn sinnπx
L, 0 < x < L.
Using Fourier sine series expansion, we get βn =2
L
LZ0
f(x) sinnπx
Ldx.
Therefore the solution to the IBVP is given by
u(x, t) =∞Xn=1
βne−(nπ/L)2c2t sin
nπx
Lwith βn =
2
L
LZ0
f(x) sinnπx
Ldx.
(Note : limt→∞
u(x, t) = 0 when B.C. are u(0, t) = u(L, t) = 0.)

8
Case II ut = c2uxx; 0 < x < L, 0 < t <∞.
B.C.
ux(0, t) = 0,
ux(L, t) = 0,0 < t <∞,
i.e., (a1, a2) = (0, 1)(a3, a4) = (0, 1)
I.C. u(x, 0) = f(x), 0 ≤ x ≤ L.
Note that as u = XT =⇒ ux = X 0T, the B.C. become X 0(0)T (t) = 0 and
X 0(L)T (t) = 0, t > 0, which lead to X 0(0) = X 0(L) = 0 if we want nontrivial
solutions. Now again,
λ = 0 =⇒ u = α+ βx. Hence
ux(0, t) = 0 =⇒ X 0(0) = 0 =⇒ β = 0 =⇒ u ≡ α.
λ < 0 =⇒ X = αekx + βe−kx and so X 0(x) = αkekx − βke−kx.
Thus u = ek2c2t(αekx + βe−kx) and
X 0(0) = X 0(L) = 0 =⇒ α = β = 0 =⇒ X(x) = 0 =⇒ u ≡ 0.
λ > 0 =⇒ X = α cos kx+ β sin kx and X 0 = −αk sin kx+ βk cos kx =⇒
u = e−k2c2t(α cos kx+ β sin kx).
Hence X 0(0) = 0 =⇒ βk = 0 =⇒ β = 0 =⇒ X 0(L) = −αL sin kL = 0. To
get nontrivial solutions we must take k =nπ
L, n = 1, 2, · · · . Therefore X =
α cosnπx
L, n = 1, 2, · · · . It follows that
u0(x, t) ≡ α0, un(x, t) = αn cosnπx
Le−(nπ/L)
2c2t, n = 1, 2, · · · .
Applying the principle of superposition,
u(x, t) =∞Xn=0
un = α0 +∞Xn=1
αne−(nπ/L)2c2t cos
nπx
L.

The Heat Equation (Diffusion equation) 9
The initial condition u(x, 0) = f(x) then yields
u(x, 0) = f(x) = α0 +∞Xn=1
αn cosnπx
L, 0 ≤ x ≤ L,
and so by half-range cosine series we obtain
α0 =1
L
LZ0
f(x)dx, αn =2
L
LZ0
f(x) cosnπx
Ldx n = 1, 2, · · · .
Thus the solution to the IBVP is
u(x, t) = α0 +∞Xn=1
αne−(nπ/L)2c2t cos
nπx
L.
with above α0 and αn.
Note : limt→∞
u(x, t) = α0 =1
L
LZ0
f(x)dx which is the average initial temperature.
Case III ut = c2uxx; 0 < x < 1, 0 < t <∞.
B.C.
u(0, t) = 0,
u(1, t) + ux (1, t) = 0;
0 < t <∞,
(a1, a2) = (1, 0)
(a3, a4) = (1, 1)
I.C. u(x, 0) = f(x), 0 ≤ x ≤ 1.
u = X(x)T (t), u(0, t) = 0 =⇒ X(0) = 0,
ux = X 0(x)T (t), u(1, t) + ux(1, t) = 0 =⇒ X(1) +X 0(1) = 0.
λ = 0 =⇒ X = α+ βx
X(0) = 0 =⇒ α = 0 =⇒ X(x) = βx =⇒ X 0(x) = β
X(1) +X 0(1) = 0 =⇒ β + β = 0 =⇒ β = 0
=⇒ X ≡ 0 =⇒ u ≡ 0 (trivial solution).

10
λ < 0 =⇒ X = αekx + βe−kx =⇒ X 0 = αkekx − βke−kx
X(0) = 0 =⇒ α+ β = 0 =⇒ α = −β.
X(1) +X 0(1) = 0
=⇒ (αek + βe−k) + k(αek − βe−k) = β(−(1 + k)ek + (1− k)e−k) = 0
=⇒ β = 0, α = −β = 0 =⇒ X = 0 =⇒ u ≡ 0 (trivial solution).
λ > 0 =⇒ X = α cos kx+ β sin kx and u = e−k2c2t(α cos kx+ β sin kx).
Hence X(0) = 0 =⇒ α = 0 =⇒ X = β sin kx =⇒ X 0 = βk cos kx,
X(1) +X 0(1) = 0 =⇒ β sin k + kβ cos k = 0 =⇒ k = − tan k (if β 6= 0).
It can be shown that tan k = −k has infinitely many roots 0 < k1 < k2 < · · · <∞,
hence X(x) = β sin kx =⇒ un = βne−k2nc2t sin knx, n = 1, .2, · · · . It follows that
u(x, t) =∞Xn=1
βne−k2nc2t sin knx
u(x, 0) = f(x) =⇒ f(x) =∞Xn=1
βn sin knx, 0 < x < 1.
To find βn, use the fact that
1Z0
sin knx sin kmxdx = 0, m 6= n, to obtain
1Z0
f(x) sin kmxdx =
1Z0
à ∞Xn=1
βn sin knx
!sin kmxdx
=∞Xn=1
βn
1Z0
sin knx sin kmxdx = βm
1Z0
sin2 kmxdx.
Hence βm =
1R0
f(x) sin kmxdx
1R0
sin2 kmxdx
, m = 1, 2, · · · .
Other cases for (a1, a2, a3, a4) can be dealt with in the similar way.

The Heat Equation (Diffusion equation) 11
Summary: Heat conduction equation ut = c2uxx; 0 < x < L, 0 < t <∞ with
B.C.
a1u(0, t) + a2ux(0, t) = 0, (a1, a2) 6= (0, 0)
a3u(L, t) + a4ux(L, t) = 0, (a3, a4) 6= (0, 0); t > 0,
I.C. u(x, 0) = f(x), 0 < x < L.
By means of separation of variables, i.e. let u(x, t) = X(x)T (t), we get
T 0(t) + λc2T (t) = 0 (*)
and X 00(x)+λX(x) = 0 with
a1X(0) + a2X
0(0) = 0,
a3X(L) + a4X0(L) = 0.
(**)
(**) is referred to as the Sturm-Liouville Problem (S-L) associated with the PDE
and B.C. To solve the S-L problem, those λ which gives non-trivial solution of X are
called the eigenvalues and the corresponding solutions X(x) are the eigenfunctions
of the S-L problem. The solution to the IBVP has the form
u(x, t) =∞Xn=1
βne−λnc2tXn(x)
where λn and Xn are the eigenvalues and eigenfunctions of the S-L problem.
The following theorem about the eigenfunctions of the S-L problem is useful:
Sturm-Liouville Theorem (simplified)
If φ1(x) and φ2(x) are two eigenfunctions of the Sturm-Liouville problem
y00 + λy = 0, 0 < x < L, with
a1y(0) + a2y
0(0) = 0
a3y(L) + a4y0(L) = 0
corresponding to eigenvalues λ1 and λ2 respectively and if λ1 6= λ2, then φ1(x) and
φ2(x) are orthogonal in the sense that
LZ0
φ1(x)φ2(x)dx = 0.

12
III Non-homogeneous boundary Conditions
1. ut = c2uxx; 0 < x < L, 0 < t <∞ with
B.C. u(0, t) = T1, u(L, t) = T2, 0 < t <∞, (T1, T2 are constant)
I.C. u(x, 0) = f(x), 0 < x < L.
As the boundary conditions are not homogeneous, the method of separation
of variables cannot be used. Let u(x, t) = v(x) + w(x, t) where v(x) is time-
independent representing the “steady state” solution and w(x, t) represents the
“transient” solution. Then
ut = wt and uxx = vxx + wxx.
PDE becomes wt = c2(vxx + wxx).
B.C. becomesu(0, t) = v(0) + w(0, t) = T1
u(L, t) = v(L) + w(L, t) = T2
t > 0,
I.C. becomes u(x, 0) = v(x) + w(x, 0) = f(x), 0 < x < L.
Take v(x) =x
L(T2 − T1) + T1. Then
vxx = 0 with v(0) = T1 and v(L) = T2.
The problem then becomes
wt = c2wxx; 0 < x < L, 0 < t <∞.
B.C. w(0, t) = 0, w(L, t) = 0, 0 < t <∞,
I.C. w(x, 0) = f(x)− v(x), 0 < x < L.
which has homogeneous boundary conditions and so can be solved as before.

Non-homogeneous boundary Conditions 13
2. ut = c2uxx; 0 < x < L, 0 < t <∞ with
B.C. u(0, t) = T1(t), u(L, t) = T2(t), 0 < t <∞,
I.C. u(x, 0) = f(x), 0 < x < L.
Here T1(t) and T2(t) are functions of t. Hence we consider
u(x, t) = v(x, t) + w(x, t).
Then ut = vt + wt and uxx = vxx + wxx.
PDE becomes (vt + wt) = c2(vxx + wxx).
B.C. becomesu(0, t) = v(0, t) + w(0, t) = T1(t)
u(L, t) = v(L, t) + w(L, t) = T2(t)
t > 0,
I.C. becomes u(x, 0) = v(x, 0) + w(x, 0) = f(x), 0 < x < L.
Therefore w(0, t) = T1(t)− v(0, t), w(L, t) = T2(t)− v(L, t),
w(x, 0) = f(x)− v(x, 0).
Again, in order to obtain homogeneous boundary condition, put vxx = 0 such
that v(0, t) = T1(t) and v(L, t) = T2(t), giving
v(x, t) = T1(t) +x
L(T2(t)− T1(t))
and vt(x, t) = T 01(t) +x
L(T 02(t)− T 01(t)).
Hence, wt = c2wxx − vt = c2wxx −hT 01(t) +
x
L(T 02(t)− T 01(t))
iwith B.C. w(0, t) = 0, w(L, t) = 0, 0 < t <∞,
I.C. w(x, 0) = f(x)− v(x, 0), 0 < x < L,
where the boundary conditions are homogeneous, but the equation is now non-
homogeneous.

14
IV Non-homogeneous Heat Equation (Eigenfunction expansion)
ut = c2uxx + g(x, t); 0 < x < L, 0 < t <∞.
B.C.
a1u(0, t) + a2ux(0, t) = 0
a3u(L, t) + a4ux(L, t) = 0; t > 0,
I.C. u(x, 0) = f(x), 0 < x < L.
Consider the corresponding homogeneous problem ut = c2uxx with the same
B.C. and I.C. as above. Its solution is of the form∞Pn=1
βne−λnc2tXn(x), where λn and
Xn(x) are eigenvalues and eigenfunctions of the associated S-L problem respectively.
We now seek a solution of the form u(x, t) =∞Pn=1
Tn(t)Xn(x) for the non-homogeneous
equation by choosing appropriate Tn(t) (note that Tn(t) = βne−λnc2t when g = 0, but
it has to be adjusted when g 6= 0).
Let g(x, t) =∞Pn=1
gn(t)Xn(x) and substitute u(x, t) =∞Pn=1
Tn(t)Xn(x) into the
non-homogeneous equation we get
∞Xn=1
T 0n(t)Xn(x) = c2∞Xn=1
Tn(t)X00n(x) +
∞Xn=1
gn(t)Xn(x).
which is satisfied if
T 0n(t)Xn(x) = c2Tn(t)X00n(x) + gn(t)Xn(x), n = 1, 2, · · · .
However, since Xn satisfies the S-L problem, i.e. X 00n(x) + λXn(x) = 0, the above
equations become
T 0n(t)Xn(x) = −c2λnTn(t)Xn(x) + gn(t)Xn(x)
=⇒ T 0n(t) + c2λnTn(t) = gn(t).

Non-homogeneous Heat Equation (Eigenfunction expansion) 15
The last equation is a first-order linear ODE and its solution is given by
Tn(t) = e−λnc2t
Tn(0) +
tZ0
gn(p)eλnc2pdp
.
It remains to determine Tn(0) and gn(t), and to satisfy the I.C. To do so,
note that Xm(x) and Xn(x) are orthogonal for m 6= n (i.e.,LR0
Xm(x)Xn(x)dx = 0) by
the Sturm-Liouville theorem as they are solutions of the S-L problem. Hence
LZ0
g(x, t)Xm(x)dx =
LZ0
" ∞Xn=1
gn(t)Xn(x)
#Xm(x)dx
=∞Xn=1
gn(t)
LZ0
Xm(x)Xn(x)dx = gm(x)
LZ0
X2m(x)dx.
Therefore.
gn(t) =
LR0
g(x, t)Xn(x)dx
LR0
X2n(x)dx
.
Furthermore, the I.C. =⇒
u(x, 0) =∞Xn=1
Tn(0)Xn(x) = f(x).
By similar manipulation as above we obtain
Tn(0) =
LR0
f(x)Xn(x)dx
LR0
X2n(x)dx
.
Finally, the solution of the original non-homogeneous PDE is given by
u(x, t) =∞Xn=1
Tn(t)Xn(x).

16
Example: PDE : ut = c2uxx + sin 3πx, 0 < x < 1, t > 0.
B.C. u(0, t) = u(1, t) = 0, t > 0,
I.C. u(x, 0) = sinπx, 0 < x < 1.
First we look for λn and Xn(x), which are the eigenvalues and eigenfunctions
of the homogeneous equation
ut = c2uxx, 0 < x < 1, t > 0 with B.C. u(0, t) = u(1, t) = 0, t > 0.
Hence λn = n2π2 and Xn(x) = sinnπx, n = 1, 2, 3, · · · .
Next, calculate
gn(t) =
LR0
g(x, t)Xn(x)dx
LR0
X2n(x)dx
=
1R0
sin 3πx sinnπxdx
1R0
sin2 nπxdx
=
1, n = 3
0, n 6= 3
and
Tn(0) =
LR0
f(x)Xn(x)dx
LR0
X2n(x)dx
=
1R0
sinπx sinnπxdx
1R0
sin2 nπxdx
=
1, n = 1,
0, n 6= 1.
From these we obtain
Tn(t) = e−λnc2t
Tn(0) +
tZ0
gn(p)eλnc2pdp
as follows:
n = 1, g1(t) = 0, T1(0) = 1 =⇒ T1(t) = e−λ1c2t = e−π
2c2t,
n = 2, g2(t) = 0, T2(0) = 0 =⇒ T2(t) = 0,
n = 3, g3(t) = 1, T3(0) = 0 =⇒
T3(t) = e−λ3c2t
tZ0
eλ3c2pdp = e−9π
2c2t
tZ0
e9π2c2pdp = e−9π
2c2t
"e9π
2c2p
9π2c2
#t0
=e−9π
2c2t(e9π2c2t − 1)
9π2c2=
1
9π2c2(1− e−9π
2c2t),
n ≥ 4 =⇒ gn(t) = Tn(0) = 0 =⇒ Tn(t) = 0.

More Heat Conduction Equations 17
Finally, we obtain the solution as
u(x, t) = T1(t)X1(x) + T3(t)X3(x)
= e−π2c2t sinπx+
1
9π2c2(1− e−9π
2c2t) sin 3πx.
V More Heat Conduction Equations
ut = c2uxx − αu; 0 < x < 1, 0 < t <∞.
B.C. u(0, t) = u(1, t) = 0; t > 0,
I.C. u(x, 0) = f(x), 0 ≤ x ≤ 1,where −αu represents heat flow across the lateral boundary.
As diffusion along the x direction is represented by c2uxx, the term −αu would
affect the solution in t only.
Let u(x, t) = φ(t)w(x, t). Then
ut = φwt + φtw and uxx = φwxx.
Therefore PDE =⇒ φwt + φtw = c2φwxx − αφw
=⇒ wt = c2wxx −µα+
φtφ
¶w.
Let φt/φ = −α. Then φt + αφ = 0 =⇒ φ = e−αt and the PDE becomes
wt = c2wxx
with B.C. w(0, t) = w(1, t) = 0
I.C. w(x, 0) = f(x).
Thus w(x, t) may be obtained as previously and u(x, t) = e−αtw(x, t).
18
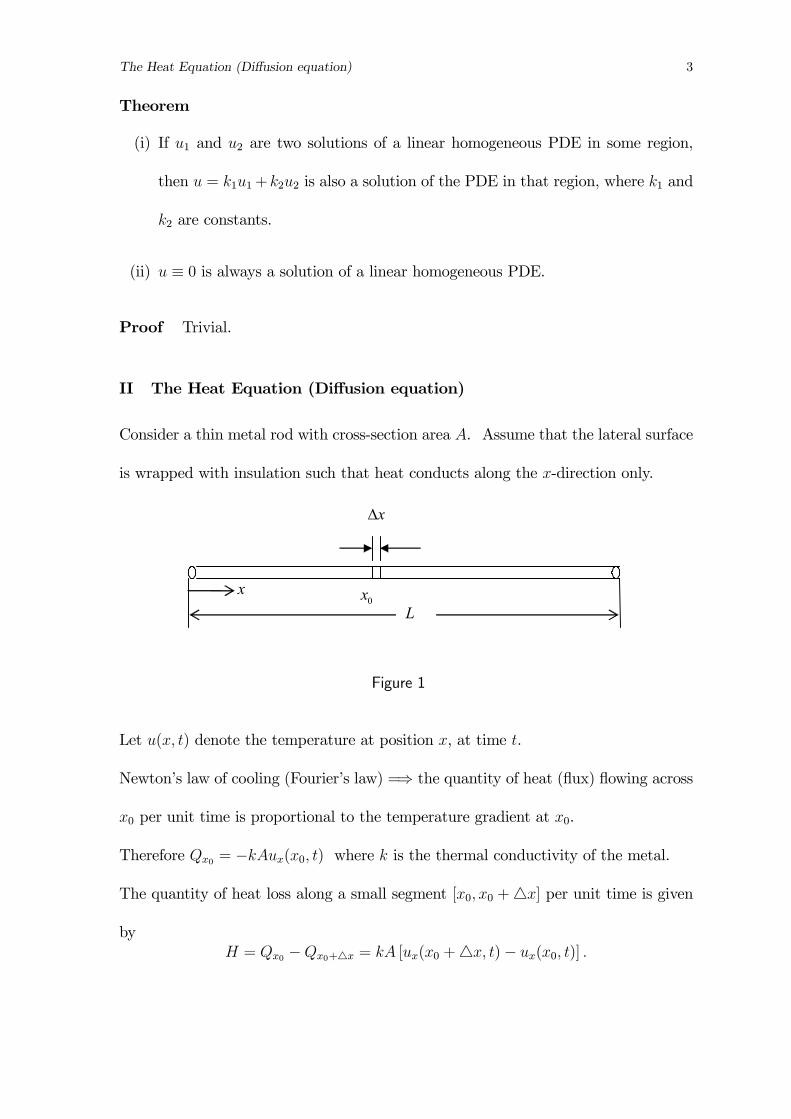
VI The Wave Equation
Consider a perfectly flexible string of uniform density ρ stretched to a uniform tension
T between two end points x = 0 and x = L.
Suppose that the string is distorted and then at a certain instant, t = 0 say,
it is released and allowed to vibrate, the problem is to determine the vibration of the
string or to find its deflection u(x, t) at any point x and at each instant time t > 0.
u
x
xxx ∆+00
T2
T1
A B
L O
α
β
Figure 2
Assumptions : (i) the string offers no resistance to bending so that the tension
is tangential to the string at each point.
(ii) gravitational force on the string is negligible compared to the
tension on the string.
(iii) the motion of the string is only in a vertical plane.
Let T1 and T2 be the tensions at the points A and B respectively. As there is
no motion in the horizontal direction, the horizontal components of the tension must
be constant, i.e. T1 cosα = T2 cosβ = T0 (constant). Vertically, the resultant of these

The Wave Equation 19
forces leads to the vertical vibration of the string and
Newton’s 2nd law =⇒ T2 sinβ − T1 sinα = ρδxutt
(ρδx is the mass of the string between A and B).
It follows that
tanβ − tanα = T2 sinβ
T2 cosβ− T1 sinα
T1 cosα=
ρδx
T0utt.
As tanβ = ux(B, t) = ux(x+ δx, t) and tanα = ux(A, t) = ux(x, t), we get
1
δx[ux(x+ δx, t)− ux(x, t)] =
ρ
T0utt.
Letting δx → 0 =⇒ uxx =ρ
T0utt =⇒ utt = c2uxx (c2 = T0/ρ), which is called
the wave equation.
IBVP for Wave equation
PDE: utt = c2uxx; 0 < x < L, t > 0.
B.C. u(0, t) = u(L, t) = 0, t > 0,
I.C.
u(x, 0) = f(x)
ut(x, 0) = g(x)
, 0 < x < L.
By the method of separation of variables, take u(x, t) = X(x)T (t). Then
utt = c2uxx =⇒ X(x)T 00(t) = c2X 00(x)T (t) =⇒T 00(t)c2T (t)
=X 00(x)X(x)
= −λ (constant) =⇒
(i)X 00(x) + λX(x) = 0
X(0) = X(L) = 0
associated Sturm-Liouville problem
(ii) T 00(t) + c2λT (t) = 0.

20
(i) =⇒ λn =n2π2
L2; Xn(x) = sin
nπx
L, n = 1, 2, · · ·
(ii) =⇒ Tn(t) = αn cosnπc
Lt+ βn sin
nπc
Lt.
Therefore the solution is given by
u(x, t) =∞Pn=1
³αn cos
nπc
Lt+ βn sin
nπc
Lt´sin
nπx
L,
u(x, 0) = f(x) =⇒ αn =2
L
LZ0
f(x) sinnπx
Ldx,
ut(x, 0) = g(x) =⇒ βn =2
nπc
LZ0
g(x) sinnπx
Ldx.
Note that αn cosnπc
Lt+βn sin
nπc
Lt = γn cos
hnπcL(t+ φn)
i(where γn =
pα2n + β2n
and φn =L
nπcarctan
αn
βn). Hence the solution may also be expressed as
u(x, t) =∞Xn=1
γn coshnπcL(t+ φn)
isin
nπx
L.
VII Classification of 2nd order linear PDE in 2 independent variables
Consider the 2nd order linear PDE
A(x, y)uxx+B(x, y)uxy+C(x, y)uyy+D(x, y)ux+E(x, y)ux+F (x, y)u = G(x, y) (∗)
If B2 − 4AC > 0 for (x, y) ∈ Ω ⊂ R2, (∗) is said to be hyperbolic in Ω.
If B2 − 4AC < 0 for (x, y) ∈ Ω ⊂ R2, (∗) is said to be elliptic in Ω.
If B2 − 4AC = 0 for (x, y) ∈ Ω ⊂ R2, (∗) is said to be parabolic in Ω.
Example utt = c2uxx =⇒ c2uxx − utt = 0. Let y = t. Then A = c2, B = 0,
C = −1. Hence B2 − 4AC = 4c2 > 0. Thus the wave equation is hyperbolic.
For ut = c2uxx, A = c2, B = C = 0, so B2 − 4AC = 0. Hence the heat equation is
parabolic.

Laplace Equations 21
For uxx + uyy = 0, A = 1, B = 0, C = 1, so B2 − 4AC = −4 < 0. Hence the
Laplace equation is elliptic.
VIII Laplace Equations
Consider ∇2u = uxx + uyy = 0.
Note that solutions of Laplace equation are called harmonic functions. Particular
solutions are :
(i) u(x, y) = a+ bx+ cy, (ii) u(x, y) = xy,
(iii) u(x, y) = x2 − y2, (iv) u(x, y) = ex cos y,
(v) u(x, y) =x
x2 + y2.
2-dimensional polar coordinates: x = r cos θ, y = r sin θ =⇒
∇2u = urr +1
rur +
1
r2uθθ = 0.
3-dimensional cylindrical coordinates: x = ρ cosφ, y = ρ sinφ, z = z =⇒
∇2u = uxx + uyy + uzz = uρρ +1
ruρ +
1
ρ2uφφ + uzz = 0.
3-dimensional spherical coordinates:
x = r sin θ cosφ, y = r sin θ sinφ, z = r cos θ =⇒
∇2u = urr +2
rur +
1
r2uθθ +
cot θ
r2uθ +
1
r2 sin2 θuφφ = 0.
Simple solutions of Laplace equation
1. Consider the 2-D Laplace equation with cylindrical symmetry (e.g. steady state
temperature distribution in a infinitely long homogeneous cylindrical metal
pipe).

22
∇2u = urr +1
rur +
1
r2uθθ = 0.
Cylindrical symmetry =⇒ uθ = 0 so that uθθ = 0. Therefore
∇2u =d2u
dr2+1
r
du
dr= 0 =⇒ r
d2u
dr2+
du
dr= 0 =⇒ d
dr
·rdu
dr
¸= 0
=⇒ rdu
dr= k (constant) =⇒ du = k
dr
r
=⇒ u = A ln r +B, r 6= 0.
This gives the solution to ∇2u = 0 with cylindrical symmetry.
2. Consider the 3-D Laplace equation with spherical symmetry, i.e. uθ = uφ = 0.
∇2u = 0 =⇒ d2u
dr2+2
r
du
dr= 0 =⇒ r2
d2u
dr2+ 2r
du
dr= 0
=⇒ d
dr
·r2du
dr
¸= 0 =⇒ r2
du
dr= k (constant)
=⇒ u =A
r+B, r 6= 0.
Laplace equation in a rectangle region
∇2u = 0 in Ω = (x, y) : 0 < x < a, 0 < y < b
u(0, y) = u(a, y) = 0; 0 < y < b,
u(x, 0) = 0
u(x, b) = f(x)
; 0 < x < a.
Solution By the method of separation of variables, let u(x, y) = X(x)Y (y)
=⇒ X 00(x)X(x)
= −Y00(y)
Y (y)= −λ (constant)
Therefore X 00(x) + λX(x) = 0 (*)
and Y 00(y)− λY (y) = 0 (**)

Laplace Equations 23
Boundary conditions =⇒ X(0) = X(a) = 0 and Y (0) = 0.
(*) is the associated Sturm-Liouville problem with eigenvalues and eigenfunctions
asλn =
n2π2
a2, Xn = sin
³nπxa
´, n = 1, 2, · · ·
(**) =⇒ Yn(y) = αn sinh³nπy
a
´.
Therefore un(x, y) = Xn(x)Yn(y) = αn sin³nπx
a
´sinh
³nπya
´and so
u(x, y) =∞Xn=1
un(x, y) =∞Xn=1
αn sin³nπx
a
´sinh
³nπya
´.
It remains to find αn. Use the nonhomogeneous boundary condition on u we get
f(x) = u(x, b) =∞Xn=1
αn sin³nπx
a
´sinh
µnπb
a
¶.
Therefore, αn =2
a sinh¡nπba
¢ aZ0
f(x) sinnπx
adx
Theorem on the principle of superposition
The Dirichlet problem ∇2u = 0 in Ω = (x, y) : 0 < x < a, 0 < y < b
with boundary conditions
u(0, y) = f1(y); u(a, y) = f2(y); 0 < y < b
u(x, 0) = f3(x); u(x, b) = f4(x); 0 < x < a
has the solution u = u1 + u2 + u3 + u4 where u1, u2, u3, u4 satisfy ∇2u = 0 and
(i) u1(0, y) = f1(y), 0 < y < b; u1 = 0 on other boundaries,
(ii) u2(a, y) = f2(y), 0 < y < b; u2 = 0 on other boundaries,
(iii) u3(x, 0) = f3(x), 0 < x < a; u3 = 0 on other boundaries,
(iv) u4(x, b) = f4(x), 0 < x < a; u4 = 0 on other boundaries.
Proof Exercise.

24
Laplace equation in circular regions
∇2u = 0 in Ω = (x, y) : x2 + y2 < A,
u(x, y) = f(x, y) on the of boundary of .Ω.
In polar coordinates, the equation becomes ∇2u = urr +1
rur +
1
r2uθθ = 0,
and the boundary condition becomes u(A, θ) = f(θ), 0 < θ < 2π.
Note that u(r, θ) is periodic in θ of period 2π and is bounded as r → 0.
Let u(r, θ) = R(r)Θ(θ) and substitute it into the equation we obtain
R00Θ+1
rR0Θ+
1
r2RΘ00 = 0 =⇒ r2
R00
R+ r
R0
R= −Θ
00
Θ= −λ (constant)
which leads to (i) Θ00 + λΘ = 0, Θ(θ) is periodic with period 2π.
(ii) r2R00 + rR0 − λR = 0, limr→0
R(r) <∞.
For (i), λ = 0 =⇒ Θ(θ) = α+ βθ and Θ(θ) is periodic =⇒ β = 0 =⇒ Θ(θ) = α.
λ < 0 (λ = −k2) =⇒ Θ = αekθ + βe−kθ and
Θ(θ) is periodic =⇒ α = β = 0 =⇒ Θ(θ) ≡ 0 (trivial solution).
λ > 0 (λ = k2) =⇒ Θ = α cos kθ + β sin kθ and
Θ(θ) is periodic with period 2π =⇒ k = n = 1, 2, · · · .
Therefore we get a sequence of solutions for Θ(θ) as
Θ0(θ) = α0, Θn(θ) = αn cosnθ + βn sinnθ; n = 1, 2, · · · .
For (ii), λ = 0 =⇒ r2R00 + rR0 = 0 =⇒ rR00 +R0 = 0 =⇒ (rR0)0 = 0
=⇒ rR0 = c1 =⇒ R = c2 + c1 ln r.
However, limr→0
R(r) <∞ =⇒ c1 = 0 =⇒ R(r) = c2.
λ = k2 = n2 =⇒ r2R00 + rR0 − n2R = 0 (Euler equation)
Let R = rm and by substitution into Euler equation we get m = ±n.
Thus R(r) = c3rn + c4r
−n and limr→0
R(r) <∞ =⇒ c4 = 0 =⇒ R(r) = Rn(r) = rn.

Laplace Equations 25
It follows that un(r, θ) = Θn(θ)Rn(r) = rn(αn cosnθ + βn sinnθ); n = 0, 1, 2, · · · .
By the principle of superposition,
u(r, θ) = α0 +∞Xn=1
rn(αn cosnθ + βn sinnθ)
where αn and βn are determined from the boundary conditions
u(A, θ) = f(θ) =⇒ f(θ) = α0 +∞Xn=1
An(αn cosnθ + βn sinnθ),
which leads to α0 =1
2π
Z 2π
0
f(θ)dθ,
αn =1
πAn
Z 2π
0
f(θ) cosnθdθ (n = 1, 2, ...),
βn =1
πAn
Z 2π
0
f(θ) sinnθdθ (n = 1, 2, ...).
*******************************
Reference Books:
Kreyszig E., Advanced Engineering Mathematics, Wiley International Edition.
Farlow S.J., Partial Differential Equations for Scientists and Engineers, Wiley Inter-
national Edition.
Boyce W.E. and DiPrima R.C., Elementary Differential Equations and Boundary
Value Problems, Wiley International Edition.
Derrick W.R. and Grossman S.I., Elementary Differential Equations with Boundary
Value Problems, Addison Wesley.








![Abstract. arXiv:1406.3283v1 [math.AP] 12 Jun 2014FRACTAL SOLUTIONS OF DISPERSIVE PDE 5 To construct solutions of VFE we consider the Schro¨dinger map equation (SM) (2) ut = u× uxx,](https://img.pdfslide.us/doc/110x75/5f896e5edaa08a4ec73f2988/abstract-arxiv14063283v1-mathap-12-jun-2014-fractal-solutions-of-dispersive.jpg)