Embed Size (px)
DESCRIPTION
Supersonic Tailless Aircraft Research
Citation preview

Parametric Geometry Model for Design Studiesof Tailless Supersonic Aircraft
Craig C. Morris,∗ Darcy L. Allison,† Joseph A. Schetz,‡ Rakesh K. Kapania,§ and Cornel Sultan¶
Virginia Polytechnic Institute and State University, Blacksburg, Virginia 24061
DOI: 10.2514/1.C032340
This paper presents an extension of the Kulfan class-shape transformation method for the parameterization ofaircraft component geometry. The VT-CST code represents a practical implementation of the class-shape transfor-mation method in an object-oriented C++ code for use within a multidisciplinary design optimization framework fordesign studies of a tailless supersonic aircraft. Extensions to the class-shape transformation method incorporated intoVT-CST include the generation of a blended wing–fuselage, cowls and inlet ramps for embedded engines, automatichandling of centerline continuity, shape normalization and scaling, fuselage area-ruling capabilities, conical cambering,airfoil shapematching, and control surfaces, among others. Examples demonstrating the utility of themethod are given.
NomenclatureAr = amplifying coefficient of the rth shape function, Srb = total wingspanC!·" = class functionCc!·" = cross-section class functionCd!·" = distribution class functionc = airfoil chord lengthHbot = height of fuselage section below X-Z planeHtop = height of fuselage section above X-Z planeKr;n = the combination of r and nky = Y-axis fuselage scaling coefficientkz = Z-axis fuselage scaling coefficientNamp = total number of chordwise amplifiersNx = user input to control number of chordwise amplifiersNy = user input to control number of spanwise amplifiersNC = cross-section class function exponentND = distribution class function exponentN1 = first class function exponent, two dimensionsN2 = second class function exponent, two dimensionsS!·" = shape functionSc!·" = cross-section shape functionSd!·" = distribution shape functionSn!·" = composite nonunity shape functionSr!·" = rth term of a parameterized shape function, two
dimensionsWf = fuselage widthzl = lower-surface z coordinatezN!·" = spanwise shear, or dihedral, function
zu = upper-surface z coordinateβ = conical camber surface ray angleΔzTE = airfoil trailing-edge thicknessζ = nondimensional z coordinateη = nondimensional y coordinateηg = global nondimensional y coordinateθ = conical camber cone half-angleψ = nondimensional x coordinateψg = global nondimensional x coordinate
I. Introduction
T HE present-day global mission of the U.S. Air Force neces-sitates the deployment of airmen and the establishment of bases
around the world at a significant cost. Additionally, increasinglycomplex political landscapes mixed with foreign technologicalinnovation have led tomore regions of theworld that are exclusionaryto foreign bases [1]. In an effort to reduce the required number offorward operating bases and individuals in harm’s way, this effortaddresses a geometry tool to complement the development of anaircraft with long-range supersonic cruise capabilities. This efficientsupersonic air vehicle (ESAV) (Fig. 1) must rapidly reach worldwidelocations and be capable of stealthily delivering munitions andperforming reconnaissance operations in diversewarfare theaters. Lowobservability requirements exclude the use of a traditional vertical tailand necessitate the use of embedded engines, edge alignment, andother stealth design philosophies. The highly coupled aerostructural-propulsive phenomena associated with these configurations create aformidable set of design challenges not seen in more conventionalaircraft.With the rising costs of aircraft development and the shrinkingof defense budgets, it is critical that 21st-century designers leveragemodern computing and multidisciplinary optimization methods tobetter understand the complex physical couplings between disciplineswhenmaking early design decisions. Thus, the ESAViswell suited fordesign through the use of multidisciplinary design optimization(MDO). In MDO, multifidelity tools from various aircraft designdisciplines can be woven together with an optimizer to generate andanalyze hundreds or thousands of feasible designs and focus the designspace toward an optimum region.As with the development of any new aircraft, the outer mold line
(OML) is key to designers in almost every discipline. The aerody-namicist is concerned with the external flows surrounding the body;the structural analyst must deal with internal volumes in which tobuild the airframe; the control designer is interested in the availableeffectors and their locations; and the propulsion expert must considerthe available fuel volume and the specifics of the engine design. Coredifferences in the utilization of the aircraft geometry often leads to thedevelopment of multiple aircraft representations that cater to oneparticular design discipline, only later to be merged into one finalaircraft design. Not only is this process inefficient, it is also
Presented as Paper 2012-4850 at the AIAA Modeling and SimulationTechnologies Conference, Minneapolis, MN, 13–16 August 2012; received18March 2013; revision received 8 February 2014; accepted for publication 9February 2014; published online 5 June 2014. Copyright © 2014 bythe American Institute of Aeronautics and Astronautics, Inc. The U.S.Government has a royalty-free license to exercise all rights under thecopyright claimed herein for Governmental purposes. All other rights arereserved by the copyright owner. Copies of this paper may be made forpersonal or internal use, on condition that the copier pay the $10.00 per-copyfee to the Copyright Clearance Center, Inc., 222 Rosewood Drive, Danvers,MA 01923; include the code 1542-3868/14 and $10.00 in correspondencewith the CCC.
*Graduate Research Assistant, Department of Aerospace and OceanEngineering; currently Aerospace Testing Alliance. Member AIAA.
†Graduate Research Assistant, Department of Aerospace and OceanEngineering; currently Optimal Flight Sciences. Senior Member AIAA.
‡Holder of the Fred Durham Chair, Department of Aerospace and OceanEngineering. Lifetime Fellow AIAA.
§Mitchell Professor, Department of Aerospace and Ocean Engineering.Lifetime Associate Fellow AIAA.
¶Associate Professor, Department of Aerospace and Ocean Engineering.Senior Member AIAA.
1455
JOURNAL OF AIRCRAFTVol. 51, No. 5, September–October 2014
Dow
nloa
ded
by JO
HN
S H
OPK
INS
UN
IVER
SITY
on
Janu
ary
29, 2
015
| http
://ar
c.ai
aa.o
rg |
DO
I: 10
.251
4/1.
C032
340

impossible for implementation in an MDO framework that executesautonomously. A single parametric geometry model capable ofserving the needs of each design discipline is, therefore, highlydesirable for MDO. The model must be intuitive to its users, detailedenough for high-fidelity analysis, and simple enough to be alteredhundreds or thousands of times during an optimization loop withoutexcessive computing time.
II. Kulfan Class-Shape TransformationA thorough review of existing parametric geometry methods was
conducted, including Kulfan’s class-shape transformation (CST) [2],Bezier curves [3], nonuniform rational B-splines (NURBS) [3],NASA’s Vehicle Sketch Pad [4], and full CAD packages. Both Beziercurves and NURBS proved to be powerful options, but they do notoffer the user intuitive adjustments to the aircraft OML and arerelatively difficult to implement. NASA’s Vehicle Sketch Pad seemedpromising due to the immense amount of development alreadyperformed and its intuitive aircraft design variables, yet the front- andback-end interfaces with other programs were cumbersome andlimited to a few formats. Full CAD packages lack intrinsic designvariables and are developed primarily for use through a graphical userinterface, makingMDO implementation quite difficult. Despite theselimitations, the power of CAD tools has spurred development in thisarea [5,6]. An excellent review of the limitiations of CAD, as well asthorough description of MDO geometry generation requirements,can be found in Vandenbrande et al. [7]. Ultimately, Kulfan’s CSTmethod was chosen for its simplicity of implementation and congru-ency with the requirements of an ESAVMDO geometry model. CSTproduces smooth, differentiable surfaces that are watertight andmalleable, with local refinement being easily achieved through themodification of very intuitive “amplifiers”. Kulfan groups shapesinto two broad classes that can be easily described using CST: theairfoil-type cross section and the body-type cross section. She beginsby developing themethod for airfoil cross sections and later extends itto arbitrary three-dimensional bodies [2].Kulfan argues that the “general and necessary” [2] mathematical
equation to describe an airfoil geometry must take the followingform:
z
c#
!!!x
c
r "1 −
x
c
#XN
i#0
$Ai
"x
c
#i%$ xc
ΔzTEc
(1)
where x and z represent coordinates in the Cartesian frame, c is theairfoil chord length, Ai represents a vector of constants, N is thevector length, and ΔzTE is the trailing-edge thickness. The pieces ofthis equation represent the fundamental equations of the CSTmethod. The first piece is the class function,
C
"x
c
##
!!!x
c
r "1 −
x
c
#(2)
and it provides the rounded nose and tapered ends necessary to drawtypical airfoil shapes. The shape function,
S
"x
c
##XN
i#0
$Ai
"x
c
#i%
(3)
describes the distribution of thickness along the chord length of theairfoil. TheAi vector represents the coefficients in front of each termin the Nth degree polynomial and will be elaborated on in a latersection. Kulfan notes that, although a polynomial shape function isnot necessary, it is among the simplest to implement and is used in thework to be presented here. Another possible example is given byStraathof et al. [8], where in addition to the Bernstein polynomials,B-splines are also included.The final piece of Eq. (1) represents the trailing-edge thickness of
the airfoil as a fraction of the local chord,
TEThickness #x
c
ΔzTEc
(4)
This term allows for a controlled finite thickness at the trailing edge, atechnique that can be very useful in the design of transonic airfoils.Further control of the shape being represented by CST can be
achieved by modification of the exponents in Eq. (2). The classfunction can be rewritten with exponents N1 and N2 as
C
"x
c
##"x
c
#N1"1 −
x
c
#N2
(5)
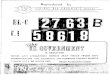
For the standard round-nosed airfoil, the class function exponents areN1 # 0.5 andN2 # 1, as in Eq. (2). By modifying these exponents,however, many different classes of shapes can be defined. Figure 2shows several examples of geometric classes that can be created usingthe (N1, N2) sets of (0.5, 1.0), (0.75, 0.75), (0.75, 0.25), and (1.0,0.001),withΔzTE equal to zero, the chord length equal to five, and theshape function set to unity. The lower surfaces are also plotted bytaking the mirror image of the upper surface.Once a general class geometry has been defined, the shape function
is used to control the specifics of the shape. Kulfan uses a Bernsteinpolynomial to define the shape function due to its utility as a partitionof unity [2], a special function that, when evaluated on the domain!x∕c" ∈ %0; 1&, will always returns unity. Thus, when used as theshape function, the Bernstein polynomial, decomposed into itspolynomial basis functions, provides a means of parameterizing thegeometry without modifying the general class shape. The rth basisfunction of an nth-degree Bernstein polynomial (n$ 1 total terms)can be written as
Sr
"x
c
## Kr;n
"x
c
#r$1 −
"x
c
#%n−r
(6)
Here, r is an integer with values from zero to n, and Kr;n arecoefficients defined as
Kr;n ≡"nr
#≡
n!
r!!n − r"! (7)
Once parameterized, the unit shape function can then be modifiedfrom unity by including amplifying coefficients Ar, such that thecomposite nonunity shape function is
Sn
"x
c
##Xn
r#0
$ArSr
"x
c
#%(8)
Note the similarity between Eqs. (3) and (8). The level of shapemanipulation achievable is controlled through the polynomial degreen in Eq. (8). Increasing n will increase the number of availableamplifiers Ar and allow for finer control of the class function geom-etry; decreasing n has the opposite effect. Therefore, a careful trademust be made to determine the best value of n for a given applicationsuch that the number of design variables is minimized while therequired geometric flexibility is still obtained. The amplifiers behave
Fig. 1 Notional efficient supersonic air vehicle.
1456 MORRIS ETAL.
Dow
nloa
ded
by JO
HN
S H
OPK
INS
UN
IVER
SITY
on
Janu
ary
29, 2
015
| http
://ar
c.ai
aa.o
rg |
DO
I: 10
.251
4/1.
C032
340

as “handles” placed chordwise in this two-dimensional geometryalong the surface to increase or decrease the thickness while main-taining a smooth shape. The influence of the handles is mostsignificant locally about its location on the geometry, but they do holdan influence over the entire length of the airfoil that diminishes withdistance. Changing multiple handles in combination can therefore beused to arbitrarily change the shape of the basic class functioncategory. In addition, the upper and lower surfaces can be definedwith different values for their respective handles and trailing-edgethicknesses, enabling both camber and variable thickness distribu-tions.An airfoil’s geometry is thus described by two related equations[Eqs. (9) and (10)], which make up one shape by using the functionsdefined in Eqs. (6–8):
"z
c
#
upper
# C"x
c
#Supperr
"x
c
#$"x
c
#ΔzupperTE
c(9)
"z
c
#
lower
# −C"x
c
#Slowerr
"x
c
#$"x
c
#ΔzlowerTE
c(10)
This method can be extended to a three-dimensional geometrywith many additional options like twist, taper, sweep, leading-edgebreaks, trailing-edge breaks, etc. The details follow from the previoustwo-dimensional theoretical derivation and can be found in aprevious work of Kulfan [2].
III. Virginia Tech Class-Shape TransformationStarting with the theoretical background reviewed in Sec. II, the
Virginia Tech class-shape transformation (VT-CST) builds upon theCSTmethod with the specific goal of drawing ESAV configurations.These configurations are of the blendedwing–body typewith embed-ded engines but no empennage assembly. Because of the necessity forlow observable edge alignment, the planform is composed of straightleading and trailing edges. Therefore, the following assumptionswere made to expedite the development of the VT-CST method.A vertical plane of symmetry exists down the centerline of thefuselage (X-Z plane).All leading and trailing edges are straight (linear) but may contain afinite number of breaks.Engines are embedded and located symmetrically on the planform.There are no vertical aerodynamic surfaces.There is no horizontal tail.Although these assumptions are valid for the particular ESAV
application, the underlying CST method can incorporate the featuresexcluded by them. For example, it is possible to modify the model toallow features like a horizontal tail or round nacelles.Several goals for theVT-CSTcodewere established. First, to retain
the intuitive nature of the original CST geometric representations, aplanform definition had to be adopted that was tractable to a designeryet still held a unique mathematical definition. Second, if the modelwas to be used by every discipline involved in an MDO framework,including aerodynamics, it was very important that the shape remainwatertight and smooth. Different disciplines require different fileformats and resolution of discretized surface data; thus, the ability toextract the desired information and export it in a particular format arealso necessities. Third, the code implementation had to run very
Fig. 2 Sample two-dimensional class function geometries in the CST method.
MORRIS ETAL. 1457
Dow
nloa
ded
by JO
HN
S H
OPK
INS
UN
IVER
SITY
on
Janu
ary
29, 2
015
| http
://ar
c.ai
aa.o
rg |
DO
I: 10
.251
4/1.
C032
340

quickly and autonomously if it is to be used for MDO, where evenmodest run times can become unwieldy when executed hundreds orthousands of times. This goal was accomplished as VT-CST takesonly a few seconds to run. During these few seconds, all necessarygeometric output files required by each disciplinary analysis arecreated. Finally, it needed to remain versatile. With too manysimplifying assumptions, the design space can be narrowed and theperformance potential of the designed aircraft limited before theoptimization even begins.
A. Object-Oriented Implementation
VT-CSTwas developed within an object-oriented C++ framework.The program was written with the greatest degree of generalitypossible while remaining in the scope of thework to be accomplished.Aclasswith thename"plane" exists that contains all of the componentsnecessary to create an ESAV aircraft. These components includefuselage, wing, inlet ramp, and engine cowl objects. A plane object ismade up of a fuselage, wing, and some combination of cowl(s) andinlet ramp(s). However, a plane object could also just be a wing, forexample. Some details of the object-oriented design are given in Fig. 3.The plane class possesses all of the necessary operators to
assemble and analyze the components of the airplane geometry.Through the use of standard vectors and loop statements, it is possibleto add multiples of the ramp and cowl component types to facilitatethe creation of multi-engined aircraft. All of the information requiredto construct the aircraft is passed into the executable through a singleordered input file. This input file uses flags so that the code can easilyparse data for the correct definition of the individual objects thatmakeup the airplane. The use of flags also allows for flexibility in thelength of the input file; for example, the user can choose to include asecond cowl and ramp and place the necessary data for these objectsanywhere in the input file. File input is favored over a graphical userinterface to define the geometry because the geometrymodel must beable to accept and pass datawithout any human interactionwithin theautonomous MDO framework.
B. Wing Definition
The first step in constructing a wing is defining the planform. Agood planform definition must be composed of intuitive design
variables and be as general as possible to draw a wide variety ofplanforms (under the ESAVassumptions). Figure 4 shows a planformrepresentative of an ESAV configuration with the design variableslabeled, along with a table identifying the associated C++ data type.The planform is defined by the root chordCroot, the tip chordCtip, thehalf-span of the wing (Semi_b), C++ standard vectors of leading-edge and trailing-edge sweep angles (LE_sweep andTE_sweep), andC++ standard vectors of the nondimensional leading-edge andtrailing-edge break locations (LE_break and TE_break). By storingthe leading- and trailing-edge sweep angles and break locations in avector, the code can efficiently handle planforms ranging from verysimple delta wings to complex wings with multiple breaks andsweeps. As the input file is read, the vectors are populated with all of
Fig. 3 Visualization of the VT-CST object-oriented structure.
Fig. 4 VT-CST wing planform definition.
1458 MORRIS ETAL.
Dow
nloa
ded
by JO
HN
S H
OPK
INS
UN
IVER
SITY
on
Janu
ary
29, 2
015
| http
://ar
c.ai
aa.o
rg |
DO
I: 10
.251
4/1.
C032
340

the inputs provided by the user and/or optimizer. The choice ofvectors not only facilitates the object-oriented framework desired, butit also provides the user with a large suite of powerful methods for thevector data type, a capability that has reduced development time fornew processes and features.Looking carefully at the design variables labeled in the figure, one
may notice the absence of a label on the outermost trailing-edgesweep angle. To ensure that the planform is always closed, thistrailing-edge angle is calculated internally to close the figure betweenthe wing tip and the outermost break along the trailing edge. It canalso be seen that the indices for the break vectors on both the leadingand trailing edges begin at unity rather than zero. Immediately afterthe input file is read, break locations are appended to the LE_breakand TE_break vectors at both the root chord [y∕!b∕2" # 0.0] and thetip chord [y∕!b∕2" # 1.0], where b is the total wingspan; thus, theindex for the first user input break is shifted to 1.Following the definition of the planform, the airfoil cross sections
must be defined to give the geometry thickness. Borrowing directlyfrom the Kulfan CST method, VT-CST makes no modifications tothe airfoil class and shape functions. All upper- and lower-surfaceamplifiers are made available to the designer through the input file,but of course there are some constraints to maintain watertight andfeasible airplanegeometries. For example, all values of z for the uppersurface must be above the corresponding lower surface so that theupper surface does not intersect the lower surface. Also, the forward-most amplifiers (along the leading edge) must be equal on the top andbottom to ensure leading-edge continuity [2]. In fact, this latterconstraint reduces the number of required design variables becausesetting the upper-surface leading-edge amplifiers necessarily sets thelower. The number of chordwise amplifiers is controlled with theinput variable Nx, and is given by the function
Namp # 2!Nx$ 1" − 1 (11)
whereNamp is the number of chordwise amplifiers. The factor of 2 iscaused by the presence of the upper and lower surface, and thesubtraction of 1 is due to the leading-edge continuity constraint.One additional constraint is enforced on the cross sections at each
leading- or trailing-edge break location.Although intuitive, the use ofsweep angles as design variables can lead to the bow-tie wing asdescribed by Vandenbrande et al. [7]. To prevent the generation ofnonsensical wing planforms where the leading and trailing edgescross, the chord length at each value of η forwhich awing break existsis checked to ensure the chord always has positive length and anexception thrown if a failure occurs. However, this approach can limitthe continuity of feasible designs in the design space [7], and futurecode development may exchange sweep angle design variables forcross-section descriptors such as x, y, and z location of the leadingedge and the chord length.With the chord sections defined, the complete wing can be
constructed. First, define the nondimensional coordinates ψ , η,and ζ as
ψ # x
c!η" ; η # y
b∕2; ζ # z
c!η" (12)
where c!η" is the local chord as a function of the spanwise location.For a flying wing or blended wing–body configuration, like somepossible ESAV configurations, the absence of a prominent fuselagestructure down the center raises an additional challenge in using theCSTmethod. To construct both sides of the aircraft, the CSTmethodis simply mirrored across the X-Z plane, a process that works quitewell for configurations where the section at η # 0 is hidden inside ofa fuselage. There is no mathematical guarantee built into the originalCST method that any form of spanwise continuity of class C1 orgreater exists along the centerline. Yet, it is important for the integrityof aerodynamic analyses that the aircraft possess a smooth andcontinuous OML. To do so, the VT-CST program internally deter-mines the required value for the first chordwise column of surfaceamplifiers such that
for η # 0 and ∀ ψ ∈ %0; 1&; ∂z∂η# 0 (13)
The designer retains control of the centerline thickness through thesecond column of surface amplifiers, but the first column is calcu-lated internally to satisfy the centerline continuity constraint. Theupper-surface z coordinate zu at some nondimensional !ψ ; η"location is
zu!ψ ; η" # ζu!ψ ; η" · c!η" $ zN!η" (14)
where ζu is the upper-surface nondimensional z coordinate, and zN!η"is a spanwise “shear” term, which can be used to facilitate the wingdihedral. Note that the lower surface differs only by a negative sign;see Eq. (10). Amplifiers in the first column are calculated by takingthe derivative of the upper- and lower-surface z-coordinate equationswith respect to the nondimensional spanwise coordinate η as
∂zu!ψ ; η"∂η
# ∂ζu!ψ ; η"∂η
· c!η" $ ζu!ψ ; η" ·∂c!η"∂η$ ∂zN!η"
∂η(15)
After some differentiation and algebra, Eq. (15) can then be evaluatedat Nx$ 1 different ψ locations corresponding to the Nx$ 1chordwise amplifier locations given by
ψ i #N1$ i
N1$ N2$ Nx for i # 0 to Nx (16)
EvaluatingEq. (15) at eachψ iwithη # 0 creates a set ofNx$ 1 linearalgebraic equations with Nx$ 1 unknowns, which are the amplifiersclosest to the wing root chord. Figure 5 provides an example of theelimination of the first column of amplifiers on a unit wing ofchordwise degree Nx # 2 and spanwise degree Ny # 4.Although the elimination of centerline amplifiers might seem to
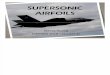
limit the design space, by increasing the spanwise degree of theBernstein polynomial !Ny", the designer can increase the number ofavailable amplifiers and minimize the wing segment for which thethickness distribution is most influenced by the internally calculatedamplifiers. The influence of the centerline continuity calculation canbe seen in Fig. 6. An arbitrary Y-Z cross section was chosen, and it iseasily seen that the bottom surfacewas calculated with the continuityconstraint engaged, while it was disengaged on the top.An additional feature added to the CST method to better facilitate
the creation of supersonic wings is conical camber. Conical camber isa wing design technique that can reduce the drag due to lift of highlyswept wings [9]. The technique involves a sharp cambering of theleading edge of an airfoil such that it follows the contour of a coneemanating from the wing apex toward the wing tip. Figure 7 shows ahalf-section of a notional wing, along with a surface ray of the conelying in the plane of the wing. The surface ray is characterized by theangle β, measured from the wing centerline. Points outside the conesurface ray, that is, the points along the leading edge of the planformup to the surface ray, are those that are to be modified by the conicalcamber.
Fig. 5 Unit wing example of amplifier handles to be internallycomputed.
MORRIS ETAL. 1459
Dow
nloa
ded
by JO
HN
S H
OPK
INS
UN
IVER
SITY
on
Janu
ary
29, 2
015
| http
://ar
c.ai
aa.o
rg |
DO
I: 10
.251
4/1.
C032
340

Figure 8 shows a cone tangent to the semiwing along the surfaceray. The cone is described by its half-angle θ, and it shares an apexwith thewing. The cone’s directrix lies in a plane that is perpendicular
to the plane described by the cone surface ray and thewing centerline.Points that are to be cambered are projected from the wing surfaceonto that of the cone. Thus, by changing the surface ray angle β andthe cone half-angle θ, the user can manipulate what portion of thewing is to be cambered as well as the severity of the camber.With only two added design variables, the conical camber
capability greatly expands the range of possible wing designs. Thisfeature is currently only supported for delta wing configurations, butfuture efforts will focus on a multisegmented wing implementation.Figure 9 provides an example of a delta wing with conical camberattached to a fuselage.
C. Fuselage Definition
The basic fuselage definition for VT-CST is not unlike that of theKulfan CST method. It is drawn from a cross-section class function(in the Y-Z plane) defined along a distribution class function (in theX-Z plane), both of which are scaled with the length and width of thedesired fuselage. The required design variables necessary to drawthe VT-CST fuselage object are listed in Table 1, followed by adescription of their use.For the purposes of drawing an ESAV, the cross section and
distribution class function exponents were held fixed to ensure thatthe fuselage would blend well with the wing and remain a practicalshape. This reduces the design space dimension by two, where thedimension is equal to the number of design variables. Although thisassumption served the purposes of the ESAV, these exponents areeasily accessible through the configuration input file, and thereforethere is no reason they could not be used. The choice of cross sectionand distribution shapes are shown in the fuselage schematics:Figs. 10, 11. Xo in Fig. 11 is the fuselage x-coordinate offset relativeto the leading edge of thewing root chord. The necessity ofXo arisesfrom the arbitrary choice of the wing as the reference coordinatesystem aboutwhich all other components of the assembly are located.The fuselage is assumed to be centered about the x axis but can beshifted along that axis.
Fig. 6 Y-Z cross-section view of example wing. Centerline continuity has been enforced on the bottom and disabled on the top.
Fig. 7 Notional semiwing illustrating the cone surface ray on the wingand its angle to the centerline, β.
Fig. 8 Illustration of wing conical cambering. Region enclosed in the dotted line is to be projected onto the surface of the cone to provide conical camber.
1460 MORRIS ETAL.
Dow
nloa
ded
by JO
HN
S H
OPK
INS
UN
IVER
SITY
on
Janu
ary
29, 2
015
| http
://ar
c.ai
aa.o
rg |
DO
I: 10
.251
4/1.
C032
340

Length, width, and height definitions can also be seen in Figs. 10,11, as well as the limits of the nondimensional length and widthvariables ψ and η. It is important to note the fundamental differencebetween the fuselage definition of ψ and η as compared to the wingdefinition previously used. The nondimensional ψ now spans themaximum length of the fuselage down the centerline, rather than justthe local chord length like the wing, and the nondimensional ηstraddles the X axis such that η # 0.5 lies on the axis, while η # 0.0and η # 1.0 correspond to the negative and positive Y-axis limits ofthe fuselage, respectively. Thewidth of the fuselage,Wf, is defined atthe midlength of the body (ψ # 0.5) and across the whole fuselagespan (from η # 0.0 to η # 1.0).In an effort to maintain an intuitive geometry model, the Kulfan
CST fuselage functions were modified to always provide a unitheight and unit width when Wf # Htop # Hbot # 1, regardless ofthe value chosen for the class function exponents for the cross sectionand the axial distribution,NC andND, respectively. These exponentsare used to change the characteristic shape of the fuselage in the sameway as N1 and N2 did for the airfoil cross section, but they also alsohave an influence on the width and height of the resultant geometry.For example, the original CST equation for the y coordinate of anarbitrary body is
y!ψ ; η" # −%Sd · Cd!ψ"& · %1 − 2η& · Wf
2(17)
where Sd and Cd are the distribution shape function and classfunction defined by Kulfan as [2]
Sd # !1∕2"2·ND; Cd!ψ" # ψND!1 − ψ"ND
When Eq. (17) is evaluated at ψ # 0.5 (the midlength) and η # 1.0(the positive y boundary), along with the definitions of Sd and Cd,
y!0.5; 1.0" # −%Sd · Cd!0.5"& · %1 − 2!1"& · Wf
2
gives
y!0.5; 1.0" # −%!1∕2"2·ND · 0.5ND!1 − 0.5"ND& · %1 − 2!1"& · Wf
2
# −%!1∕2"4·ND& · %−1& · Wf
2
# −!1∕2"4·ND ·Wf
2(18)
When the desired total fuselage width Wf is unity, the value ofy!0.5; 1.0" should be 1
2. Clearly, from Eq. (18), withWf # 1,
y!0.5; 1.0" # !1∕2"4·ND ·1
2
or
y!0.5; 1.0" # 1
ky·1
2
where
ky # !1∕2"−4·ND (19)
the value of y!0.5; 1.0" is not 12 but rather a function of the distributionclass function exponent ND. By including ky as a Y-axis scalingcoefficient in the arbitrary body equation,
y!ψ ; η" # −ky%Sd · Cd!ψ"& · %1 − 2η& · Wf
2(20)
VT-CST returns the width Wf input by the user regardless of thechoice made for the exponent ND. An identical process can befollowed in the determination of the Z-axis scaling coefficient kz byevaluating the original CST z-coordinate function at ψ # 0.5 (themidlength) and η # 0.5 (the centerline of the fuselage). The scalingcoefficient is then determined to be
kz # !1∕2"−4·ND−4·NC−1 (21)
and the z-coordinate function becomes
z!ψ ; η" # 'kz%Sd · Cd!ψ"& · %Sc · Cc!η"& ·H
2(22)
whereH is the height of the top or bottom half of the fuselage section,Htop or Hbot, and Sc and Cc!η" are the cross-section shape and classfunctions given by
Sc # !1∕2"2·NC; Cc!η" # ηNC!1 − η"NC
Similar to the Kulfan CST method, the top and bottom halves of thefuselage (as defined by an X-Y horizontal cutting plane) are drawnfrom identical functions with opposite signs, allowing the height ofeach half to be defined independently with a simple scaling factor.This allows for fuselage asymmetry about the horizontal plane.Further modifications to the Kulfan CST fuselage functions were
made to facilitate the well-known concept of "area ruling" insupersonic aircraft design. First proposed by Whitcomb [10], arearuling is a strategic design technique used to reduce thewave drag ona body that arises from the presence of shock waves in a supersonicflow. The wave drag equation is described by Ashley and Landahl[11] and is a complex triple integral with a very physicalinterpretation:
Dw#−ρ∞U2
∞8π2
Z2π
0dθZl
0
Zl
0S 0 0!x1;θ"S 0 0!x2;θ" ln jx1−x2jdx1 dx2
(23)
Fig. 9 Example delta wing aircraft with conical camber and magnified view of representative wing cross section.
Table 1 VT-CST fuselage designvariables
Fuselage design
Variable DescriptionNC Cross-section class function exponentND Distribution class function exponentL Total lengthWf Maximum theoretical widthHtop Height of section above X-Z planeHbot Height of section below X-Z planeX0 Leading edge of fuselage x locationkloc Area-ruling location gainkmag Area-ruling magnitude gainkwidth Area-ruling width gain
MORRIS ETAL. 1461
Dow
nloa
ded
by JO
HN
S H
OPK
INS
UN
IVER
SITY
on
Janu
ary
29, 2
015
| http
://ar
c.ai
aa.o
rg |
DO
I: 10
.251
4/1.
C032
340

A few of the terms in the Eq. (23) are easily recognizable as thefreestream density and velocity, ρ∞ and U∞. The most importantterm is the function S!x; θ", where S is the cross-sectional area in aplane inclined at theMach angle and rotated through an angle θ aboutthe y axis as a function of the longitudinal location along the body, x.This can be difficult to visualize, and the interested reader is referredto Ashley and Landahl [11]. S appears in Eq. (23) as a secondderivative with respect to xwithin a double integral; thus, the goal ofminimizing the total wave drag Dw is achieved not just throughminimization of the total cross-section area but also the rate of changeof the area. It is therefore desirable for the cross-sectional areadistribution along the x axis to be smooth and continuous to avoiddiscontinuities or large rates of change, thus reducing the integral ofthe second derivative.To best incorporate a simplified form of area ruling that would
provide the user with sufficient capability to smooth the overall areadistribution with minimal added complexity, VT-CST includes threeadditional fuselage variables that allow for the control of fuselagenecking or “coke bottling”, an easily identified design feature onarea-ruled aircraft. To mathematically implement a function capableof area ruling, a phase-shifted half-period sinusoidal “pinching”function is superimposed upon the VT-CST y- and z-coordinateequations [Eqs. (20) and (22)]. The area-ruling sinusoidal pinchingfunction AR!ψ" is only a function of the nondimensional fuselagelength and was chosen due to its ease of manipulation. The half-period of 0 to π is used because the first derivatives at theseboundaries are zero, facilitating a smooth blend into and out of thearea-ruled region. The area-ruling function is given by
AR!ψ" #
8>>>><>>>>:
Wf!Htop $Hbot" if ψ < kloc$1$ kmag
2
&sin&
2πkwidth!ψ − kloc" $ π
'− 1
'%Wf!Htop $Hbot" if kloc ≤ ψ ≤ kloc $ kwidth
Wf!Htop $Hbot" if ψ > kloc $ kwidth(24)
The three additional fuselage area-ruling design variables arekloc ≡ the nondimensional ψ location of the start of area ruling,kwidth ≡ the nondimensional width over which to apply area rule,and kmag ≡ the normalizedmagnitude of the area ruling, and they canbe easily visualized in Fig. 12. To better understand the behavior ofthe area-ruling function, it is best to first look at the area-ruled yfuselage coordinate function as an example:
y!ψ ; η" # −ky2%Sd · Cd!ψ"& · %1 − 2η& ·
"AR!ψ"!W∕H"ratio
#1∕2
(25)
where
!W∕H"ratio #Wf
Htop $Hbot
(26)
Manipulation of the fuselage cross-sectional area, through the useof Eq. (24), is achieved by subtracting a phase-shifted sinusoid ofmagnitude kmag∕2 and half-period of kwidth from unity andmultiplying that by a “pseudoarea” termWf!Htop $Hbot".When thearea-ruling function is implemented, it effectively scales the cross-sectional area distribution in ψ by the half-period of a sine wave,phase shifted by π, of magntiude kmag, and within the region ofkloc ≤ ψ ≤ !kloc $ kwidth". Then, the presence of !W∕H"ratio inEq. (25) serves to maintain a consistent ratio between the width andthe height of the fuselage under an area-ruling operation. Figure 13
Fig. 10 Sample Y-Z cross section of the fuselage without area ruling.
Fig. 11 Sample X-Z distribution section of the fuselage without area ruling.
1462 MORRIS ETAL.
Dow
nloa
ded
by JO
HN
S H
OPK
INS
UN
IVER
SITY
on
Janu
ary
29, 2
015
| http
://ar
c.ai
aa.o
rg |
DO
I: 10
.251
4/1.
C032
340

shows one aircraft with several different variations of areamanipulation applied. Superimposed upon each graphic is a plot ofthe normal cross-sectional area distribution versus nondimensionallength to illustrate the achievable variations in cross-sectional area.
D. Embedded Engine Cowl Definition
Although the Kulfan CST method provided for a means to drawpod-hung nacelles, the rendering of embedded engine cowls was notaddressed. Mathematically, the engine cowl is a simplified extensionof the wing drawing methods. The unit planform definition of thecowl is identical to that of the wing, working in the nondimensional ψand η space, but the transformation to the physical domain is muchmore simple. Figure 14 shows the front view of a single cowl,highlighting the cowl dimension design variables available to the user.The cowl is simply a rectangular wing that has been “bent” to providethe sloped sides described by the top widthWtop, bottom widthWbot,and height h. Bending is accomplished through a simple lineartranslation of the z coordinate such that the desired widths and heightare achieved. The length design variable l can be seen in Fig. 15.Several assumptions have been made to simplify the construction
of the engine cowl; however, these could quickly be discarded shouldthe user find them limiting. First, the degree of the Bernsteinpolynomial shape function for both the streamwise and spanwisedirections defaults to 2, allowing for a 3 × 3 distribution of top andbottom amplifiers. Conceptual designMDOdoes not require a highlydetailed engine cowl design, and so the reduced number of amplifiersis not limiting for the originally intended ESAV MDO use ofVT-CST. Further simplification is made by assuming that all of theleading-edge amplifiers are the same across the span (uniform
leading-edge radius) as well as all of the midchord (uniformmaximum thickness) and trailing-edge amplifiers (uniform trailing-edge angle). This effectively reduces the design variables to three forthe basic cowl shape: the leading-edge radius, the maximumthickness, and the trailing-edge angle for the entire span. The cowl isnot a lifting body, and camber is unnecessary, and so it is assumed thatthe top and bottom amplifiers are equivalent and that a chord slice ofthe cowl is symmetrical.Two other designvariables, x0 and y0, are used to place the cowl on
the aircraft. The x0 coordinate location specifies the x value of thefront face relative to the wing’s root chord leading edge. The object-oriented nature of VT-CSTallows for the creation of multiple enginecowls, should the designer desire both fuselage-embedded and wing-embedded engines simultaneously, or multiple wing-embeddedengines. By simply changing the variable y0, the user can move thecenterline of the cowl outward along the span to place the enginesoutboard on thewing (Fig. 15). The engine cowl and ramp centerlinevariables are prescribed together. Because X-Z plane symmetry is acore assumption of the VT-CST geometry model, if a cowl and rampy0 is prescribed such that they do not lie entirely off the centerline,
Fig. 12 Visualization of the added area-ruling fuselage design variables.
Fig. 13 Notional ESAV planforms with varying degrees of area ruling applied to the fuselage. (Plots represent the total cross sectional area distributionnormal to the x-axis versus nondimensional vehicle length.)
Fig. 14 Engine cowl front view (Y-Z cross section) showing some of theavailable design variables. Fig. 15 Isometric view of engine cowls when placed on the wing.
MORRIS ETAL. 1463
Dow
nloa
ded
by JO
HN
S H
OPK
INS
UN
IVER
SITY
on
Janu
ary
29, 2
015
| http
://ar
c.ai
aa.o
rg |
DO
I: 10
.251
4/1.
C032
340

then the code will automatically enforce the creation of a centerlinecowl and ramp. Therefore, y0 must be greater than or equal toWbot∕2in order for the engines to move off the centerline. The z location ofthe cowl is constrained to lie on the wing’s mean plane (the X-Yplane). Currently, no filleting of the intersection between the cowland the wing is performed due to the fact that the conceptualMDO level aerodynamic analysis tools in use cannot resolve theexcrescence drag that would result from such a sharp intersection.Future efforts to increase the fidelity of aerodynamic analyses willrequire this limitation to be revisited.
E. Engine Ramp Definition
Much like the relationship betweenwing and cowl, the engine rampis an extension of the fuselage object generation methods. The designvariables necessary to describe the shape are identical, with theexception of the three area-ruling variables, which are not necessary.Specifics of inlet and nozzle design are not handled in conceptualdesign MDO; therefore, the need for a high degree of ramp manipula-tion like sinusoidal pinching is superfluous. Because the engine rampdoes not extend below the body of the aircraft, only one half of thefuselagelike cross section is needed, reducing the number of rampdesign variables further to four (x0, length, width, and height). The y0parameter is fixed by the corresponding cowl because the ramp isconstrained to be centered under the engine cowl. An isometric view ofa complete aircraft with wing embedded engines is shown in Fig. 16,along with labels identifying the engine cowl and ramp objects.
F. Control Surface Definition
The Kulfan CST method proposes the ability to modify two-dimensional airfoil cross-sections to model deflected control surfaces,
but details on the three-dimensional implementation are absent fromthe published work. High-lift devices and elevons are a critical designfeature on tailless aircraft. An inability to model the aircraft with thesedevices for analysis would be a significant limitation in any geometrymodel. To address this, VT-CST currently has the ability to modelmultiple trailing-edge devices. These devices, and their deflections,can be described with the addition of just five design variables per flappair. The design variables are shown graphically in Fig. 17 and includethe nondimensional inboard and outboard span locations (ηflapin andηflapout), the flap chord length cflap, and the port and starboard sideangular deflections (δprt and δstrbd).Flap deflections are accomplished through a coordinate transfor-
mation about the axis described by the forward flap chord line,through an angle prescribed by the input deflections; the top andbottom surface are rotated separately through their respective hingelines. It is noted that, although this method maintains the watertightnature of the geometry, it does distort the shape of a flap that has finitethickness at the hingeline. This distortion is minor, however, and forreasonable deflection angles does not pose a geometric conflict. Anotional ESAV wing–body is shown in Fig. 18 with the controlsurfaces deflected.
G. Global Nondimensional Coordinates ψg and ηgIn an effort to make the implementation of VT-CST even easier
for the user, a global definition for ψ and η were developed. Aswith the individual components, this new ψg and ηg represent thenondimensional local chord and the nondimensional spanwiselocation, respectively. Whenever VT-CST is queried for a given ψgand ηg, the program first converts these values to an x and ycoordinate, respectively. It then automatically establishes existencecriteria for each of the components at that point. Next, it transformsthe global ψg and ηg into local ψ and η values for each of the
Fig. 16 Notional ESAV aircraft with wing embedded engines. Note thecenterline of the engine cowls and ramps have the same y-coordinatevalue.
Fig. 17 Graphical depiction of control surface design variables on notional ESAV planform.
Fig. 18 Notional ESAV wing–body with deflected control surfaces.
1464 MORRIS ETAL.
Dow
nloa
ded
by JO
HN
S H
OPK
INS
UN
IVER
SITY
on
Janu
ary
29, 2
015
| http
://ar
c.ai
aa.o
rg |
DO
I: 10
.251
4/1.
C032
340

geometric components that exist. It then uses these local coordinatesto calculate the zupper and zlower values for each component at thequeried x and y location. Finally, it returns the maximum zupper andminimum zlower coordinate from all components that exist to describethe OML representation of the aircraft.
By implementing the existence criteria and global ψ and ηdefinitions, the use of VT-CST is drastically simplified for the enduser. There is no need to keep track of planform or componentarrangement after the input file has been created, and creating surfacemeshes is accomplished with iterators through the two globalnondimensional coordinates. All local nondimensional coordinatesystems for the individual components in the plane object remaincompletely unaffected by the global definition. Therefore, thedrawing functions that accompany the individual object componentscan still be used in addition to the global drawing functions.
H. Additional Capabilities
The first and foremost function of the VT-CST geometry model isto provide discipline analyses within the MDO framework ageometric representation of the ESAV. The versatility of VT-CST isshown in its ability to interfacewith all disciplinemodels in the ESAVMDO framework, regardless of the fidelity level of the discipline.Two examples are given in this section but are not intended to be allinclusive of the capabilities of VT-CST. A ubiquitous geometricalformat is the triangulated representation known as the stereolitho-graphic (.stl) file format. This simple and robust surface geometrysplits the surface into triangles, each represented by a surface-normalvector and three-dimensional coordinates for each vertex. Beyondmost CAD programs, many other software programs accept this typeof geometry input. In accordance with this, the .stl format wasprogrammed into the VT-CST model as an output option. Anexample of a notional ESAV in this format is given in Fig. 19.A second example is the interface with the aerodynamic analysis.
The medium-fidelity aerodynamic model in the ESAVMDO frame-work requires a discretized aircraftOML input in the formof trianglesand/or quadrilateral panels. This meshing is done automatically inVT-CST for arbitrary shapes, at the cost of not always having an idealaerodynamic mesh. This meshing tradeoff is acceptable because theframework must be automated to perform MDO, and aerodynamicanalyses can be completed with the resulting panel representation ofthe ESAV.Themain challenge to the automaticmeshing are the cowlsand ramps, but the internal VT-CSTalgorithms used to automaticallycreate the panel mesh have been crafted to represent these geometriesso that their shape is preserved. An example of a coarse aerodynamicmesh with a cowl and ramp on the fuselage is shown in Fig. 20.The coarse mesh is likely to be too coarse for accurate aerodynamicanalysis, but it is shown for the purposes of demonstrating theautomatic meshing capabilities with varying degrees of meshrefinement.For the purposes of MDO framework validation, it is often desired
to use VT-CST to match the geometry of an existing shape. In thiscase, the power of the VT-CST geometry model was tapped to matchexisting three-dimensional wing shapes of existing aircraft. Thedesired planform shape is input by the user, and the wing thicknessand camber are matched using the geometric handles, or amplifiers(discussed in Sec. II). Unfortunately, there is no intuitive way for theuser to set the handles to the correct values to produce a desired winggeometry. The three-dimensional matching process, therefore,begins with known root and tip airfoils (or other airfoils along thespan, if known) and any other known shaping effects, like a conical
Fig. 19 Notional ESAV configuration output in the .stl file format.
Fig. 20 Notional ESAV configuration output in a coarsely meshedmedium-fidelity aerodynamics file format.
Fig. 21 F-5 wing planform and desired airfoil sections on the left, with results of matching process demonstrated at the tip airfoil on the right.
MORRIS ETAL. 1465
Dow
nloa
ded
by JO
HN
S H
OPK
INS
UN
IVER
SITY
on
Janu
ary
29, 2
015
| http
://ar
c.ai
aa.o
rg |
DO
I: 10
.251
4/1.
C032
340

camber profile. The known airfoil sections and other known geomet-rical features are then used as equality constraints in an optimizationprocess to match the VT-CST geometry model definition of the wingto the actual wing. The designvariables in thismatching optimizationproblem are the wing-shaping handles and the conical cambervariables, while the objective function to be minimized during theoptimization is the difference (error) between the VT-CST model ofthe shape and the actual shape at the discrete locations where it isdefined.The wing matching process was performed for an F-5 wing. The
resulting VT-CST geometry representation of the F-5 geometrymatched very closely with the actual geometry. The optimizationprocess was able to find the wing-shape handles so that the finaloptimum wing OML varied smoothly between the defined root andtip chord airfoil shapes (no wavy geometry between handle loca-tions). This process has also been applied to other aircraft shapessuccessfully [12]. Figure 21 illustrates the F-5 wing matchingprocess, including a comparison of the desired and the resultant tipairfoil sections.
IV. ConclusionsBuilding upon the class-shape transformation aircraft geometry
method originally developed by Kulfan [2], VT-CST is a practicalimplementation with a particular focus on tailless supersonicconfigurations. Several enhancements have beenmade to the originalCST method, including generation of a blended wing–fuselageshape, supersonic area-ruling capabilities, automatic centerlinecontinuity enforcement, conical cambering, shape normalization andscaling, deflected control surfaces, and embedded engine generation.Each of these enhancements is necessary to support the design of theaircraft under study. VT-CST is an object-oriented code and verygeneral by nature. It is capable of drawing a breadth of taillessconfigurations that arewatertight and are described by intuitive designvariables, both of which are highly desirable features in conceptualaircraft multidisciplinary design optimization. The program’s lowCPU time allows for repeated geometry generation within anoptimization loop at very little cost. The analytical formulation of thegeometry allows for easy file output to the various required formats foreach of the analyses within the MDO framework. Although the VT-CST geometry code is the centerpiece to performing design studies foradvanced tailless aircraft, the methods are general, and it could beextended togenerate geometries for other classes of aircraft.VT-CSTiscurrently in routine use as part of an MDO development effort fortailless supersonic aircraft and is thus under regular development. Acase in point is the current effort to use VT-CST to design both theOML and the internal structure of thewing. This processwill highlightany limitations of the code when used for the purpose of structuraldesign. As those limitations become obvious, remedies will bedeveloped to overcome them.
AcknowledgmentsThis material is based on research sponsored by the U.S. Air Force
Research Laboratory under agreement number FA8650-09-2-3938.The U.S. Government is authorized to reproduce and distributereprints for governmental purposes notwithstanding any copyrightnotation thereon. The views and conclusions contained herein arethose of the authors and should not be interpreted as necessarilyrepresenting the official policies or endorsements, either expressed orimplied, of the U.S. Air Force Research Laboratory or the U.S.Government.
References[1] Krepinevich, A.,Watts, B., andWork, R., “Meeting theAnti-Access and
Area-Denial Challenge,” Center for Strategic and Budgetary Assess-ments TR, Washington, D.C., 2003.
[2] Kulfan, B. M., “Universal Parametric Geometry RepresentationMethod,” Journal of Aircraft, Vol. 45, No. 1, 2008, pp. 142–158.doi:10.2514/1.29958
[3] Farin, G., Curves and Surfaces for CAGD: A Practical Guide, 4th ed.,Academic Press, San Diego, CA, 1996.
[4] Vehicle Sketch Pad User Manual, 1st ed, NASA Aeronautics SystemsAnalysisBranch,NASALangleyResearchCenter,Hampton,VA, 2012.
[5] Rocca, G. L., and van Tooren,M. J. L., “Knowledge-Based EngineeringApproach to Support Aircraft Multidisciplinary Design and Optimiza-tion,” Journal of Aircraft, Vol. 46, No. 6, 2009, pp. 1875–1885.doi:10.2514/1.39028
[6] Ledermann, C., Ermanni, P., and Kelm, R., “Dynamic CADObjects forStructural Optimization in Preliminary Aircraft Design,” AerospaceScience and Technology, Vol. 10, No. 7, 2006, pp. 601–610.doi:10.1016/j.ast.2006.07.001
[7] Vandenbrande, J. H.,Grandine,T.A., andHogan,T., “TheSearch for thePerfect Body: Shape Control for Multidisciplinary Design Optimiza-tion,” 44th AIAA Aerospace SciencesMeeting and Exhibit, AIAA Paper2006-0928, Jan. 2006.
[8] Straathof, M. H., van Tooren, M. J., Voskuijl, M., and Koren, B.,“Aerodynamic Shape Parameterisation and Optimization of NovelConfigurations,” Proceedings of the RAeS Aerodynamic Shape Param-eterisation and Optimization of Novel Configurations Conference,Royal Aeronautical Soc., London, Oct. 2008, pp. 1–14.
[9] Boyd, J. W., Migotsky, E., and Wetzel, B. E., “A Study of ConicalCamber for Triangular and Sweptback Wings,” NACA RM-A55G19,Nov. 1955.
[10] Whitcomb, R. T., “AStudy of the Zero-Lift Drag-Rise Characteristics ofWing–Body Combinations Near the Speed of Sound,” NACA Rept.1273, 1956.
[11] Ashley, H., and Landahl, M., Aerodynamics of Wings and Bodies,Dover, New York, 1985, pp. 184–188.
[12] Allison, D. L., Morris, C. C., Schetz, J. A., Kapania, R. K., and Deaton,J. D., “AMultidisciplinary Design Optimization Framework for DesignStudies of an Efficient Supersonic Air Vehicle,” 14th AIAA/ISSMOMultidisciplinary Analysis and Optimization Conference, AIAA Paper2012-5492, Sept. 2012.
1466 MORRIS ETAL.
Dow
nloa
ded
by JO
HN
S H
OPK
INS
UN
IVER
SITY
on
Janu
ary
29, 2
015
| http
://ar
c.ai
aa.o
rg |
DO
I: 10
.251
4/1.
C032
340