Embed Size (px)
Citation preview

PARALLEL VARIABLE DISTRIBUTION FOR TOTAL LEAST
SQUARES
HONGBIN GUO AND ROSEMARY A. RENAUT
Abstract. A novel parallel method for determining an approximate to-
tal least squares (TLS) solution is introduced. Based on domain dis-
tribution, the global TLS problem is partitioned into several dependent
TLS subproblems. A convergent algorithm using the parallel variable
distribution technique (Ferris and Mangasarian, 1994) is presented. Nu-
merical results support the development and analysis of the algorithms.
Keywords: Total least squares, Variable distribution, Errors-in-variables
regression.
AMS(MOS) subject classification: 65F20, 90C06, 90C26, 90C30
1. Introduction
Total least squares (TLS), which has existed in statistics under the name “errors-
in-variables regression” for a long time as a natural generalization of least squares
(LS), was introduced to numerical specialists in 1973 by Golub([7]). In the last
two decades, the TLS problem has been researched from many different numerical
perspectives, [14, 2, 8, 5, 16, 13, 20], excepting the development of a parallel algo-
rithm. Among these references, [14] includes a complete introduction and analysis
of basic algorithms. Here, we consider large-scale well-posed problems; for ill-posed
TLS problems refer to [8, 5, 13, 20].
In contrast to the standard LS model for the TLS model both the matrix A and
the right hand side b in the overdetermined linear system Ax ≈ b, A ∈ Rm×n,m >
n, are assumed to contain errors. The TLS solution xTLS solves the following
optimization problem:
(1.1) minE,f
‖[E, f ]‖2F subject to (A+E)x = b+ f,
Date: September 10, 2004.
This work was partially supported by the Arizona Center for Alzheimer’s Disease
Research, by NIH grant EB 2553301 and for the second author by NSF CMG-02223.
Email:hb [email protected].
Email:[email protected].
1

2 HONGBIN GUO AND ROSEMARY A. RENAUT
where ‖.‖F denotes the Frobenius norm. If UΣV T is a singular value decomposition
of the augmented matrix [A, b], the smallest singular value σn+1 is simple and
v(n + 1, n + 1) 6= 0 (generic), then xTLS = −v(1 : n, n + 1)/v(n + 1, n + 1) and
[E, f ] = −σn+1un+1vTn+1, where here ui, vi are the columns of matrices U and V ,
respectively. Moreover, xTLS satisfies,
f =AxTLS − b
1 + ‖xTLS‖2,(1.2)
E = −f · xTTLS,(1.3)
and minimizes the sum of squared normalized residuals,
(1.4) xTLS = argminxφ(x) = argminx
‖Ax− b‖2
1 + ‖x‖2,
[10, 14]. Here φ is the Rayleigh quotient (RQ) of matrix [A, b]T [A, b]. For conve-
nience we denote the TLS problem for the augmented matrix [A, b] by TLS(A, b)
and say that xTLS solves the problem TLS(A, b).
For a large-scale problem, the singular value decomposition (SVD) calculation
is expensive. Because we only need one singular vector, iterative methods can
be used to improve the computational speed. For example, inverse power, in-
verse Chebyshev iteration [14] and Rayleigh quotient iteration (RQI) [2] could be
used. Related methods for computing smallest singular value(s) (and vector(s))
are Jacobi-Davidson [22], trace minimization [21] and Inverse Rayleigh Ritz itera-
tion [12]. We also note that block Lanczos and block Davidson methods, based on
parallel sparse matrix-vector multiplication, were discussed for computing the sin-
gular subspace associated with the smallest singular values [18]. Here, rather than
computing the singular vectors, we use the TLS minimization formulation (1.4),
and solve the optimization problem by application of the parallel variable distri-
bution(PVD) approach of Ferris and Mangasarian, [4]. This approach is suitable
for both sparse and dense data structures. The specialization of PVD to the linear
least squares problem was presented in [19], [3] and a more general approach was
presented in [6].
To apply the PVD approach we introduce the decomposition of the space Rn
as a Cartesian product of lower dimensional subspaces Rnj , j = 1, · · · , p, where∑p
j=1 nj = n. Accordingly, any vector x ∈ Rn is decomposed as (Px)T = (xT1 , x
T2 ,
· · · , xTp ), where P is a permutation matrix. Matrices A and E are partitioned

PARALLEL VARIABLE DISTRIBUTION FOR TOTAL LEAST SQUARES 3
consistently
AP = [A1, A2, · · · , Ap],
EP = [E1, E2, · · · , Ep].
Without loss of generality, we ignore the permutation matrix P in the analysis and
theoretical development of the algorithms. For ease we introduce the notation xi
to be the complement of xi, namely the vector x with zeros in block i.
Consistent with application of the PVD approach we assume for the iterative
algorithm that there are p processors, each of which can update a different block-
component, xj . Each of these processors may be designated a slave processor, which
is coordinated by a single master processor. The slaves solve the local problems and
are coordinated for solution of the global problem by the master processor. If there
are insufficient available processors, the algorithms are modified appropriately to
consider the separate processes, rather than processors. If∑p
j=1 Rnj = Rn and
∑p
j=1 nj > n, the spatial decomposition is designated as an overlapped decompo-
sition, otherwise it is without overlap. In the theoretical analysis we assume that
the subproblems are not overlapped, although our numerical experiments consider
both situations.
In the presentation of the basic algorithms we do not give all details of the
parallel implementation for the linear algebra operations. For example, calculation
of matrix vector products, where the matrix is distributed over several processors
with local memory, requires local computation, global communication and global
update. Such operations are by now well documented, see for example [10], and
dependent on the local architecture employed for problem solution.
We reemphasize that the focus of this work is the development of a domain
decompostion approach and the study of its feasibility. The remaining sections of
this paper are organized as follows. We provide the development of the algorithms
and analyze their properties in Section 2. Convergence analysis is presented in
Section 3, computational considerations in Section 4, numerical experiments in
Section 5 and conclusions in Section 6.
2. Algorithms

4 HONGBIN GUO AND ROSEMARY A. RENAUT
2.1. Development. Domain decomposition applied to the Rayleigh quotient for-
mulation for the TLS problem, (1.4), suggests the local problems are given by
(2.5) zi = argminz∈Rni
‖Aiz − b(xi)‖22
1 + ‖z‖22 +
∑
j 6=i ‖xj‖22
,
where
(2.6) b(xi) = b−∑
j 6=i
Ajxj = r(x) +Aixi, r(x) = b−Ax.
Setting
(2.7) β2i = 1 +
∑
j 6=i
‖xj‖2, wi = zi/βi and bi = b(xi)/βi,
(2.5) is replaced by
(2.8) wi = argminw∈Rni
‖Aiw − bi‖22
1 + ‖w‖22
,
which now looks like (1.4) for TLS(Ai, bi). In other words, wi solves
minEi,fi
‖[Ei, fi]‖ subject to (Ai + Ei)wi = bi + fi.
Equivalently zi is the solution of the weighted TLS subproblem :
(2.9) minEi,fi
‖[Ei, β2i fi]‖
2F subject to (Ai +Ei)zi = b(xi) + β2
i fi.
2.2. Global Update. The parallel algorithm requires both a mechanism to find
local solutions Yi, = 1 . . . p, where Yi is vector x with component xi replaced by zi,
for each local problem, the parallelization phase, and the process by which a global
update is obtained, the synchronization phase. Of course, if parallelism is not
required, then a Gauss-Seidel update can be formed, in which the local problems
are solved using the most uptodate information from each subproblem. On the
other hand, for true parallelism, there are various approaches for the global update
at the synchronization step. These mimic the alternatives presented in [19] for the
multisplitting solution of the least squares problem.
Before listing all synchronization approaches, we introduce a mechanism for an
optimal global update at synchronization.
Theorem 2.1. Let D ∈ Rn×p and γ ∈ Rp, and define
ψ(γ) =‖A(x+Dγ) − b‖2
2
1 + ‖x+Dγ‖22
.

PARALLEL VARIABLE DISTRIBUTION FOR TOTAL LEAST SQUARES 5
Then γmin = argminγ∈Rpψ(γ) satisfies
(2.10) (DTATAD − ψ ·DTD)γ = DTAT r + ψ ·DTx,
where r = b−Ax.
Proof. We introduce the notation ψ = ψ1/ψ2, where
ψ1(γ) = ‖A(x+Dγ) − b‖22 ≥ 0,(2.11)
ψ2(γ) = 1 + ‖x+Dγ‖22 ≥ 1.(2.12)
Then at a stationary point
ψ′1 − ψ · ψ′
2 = 0.
Replacing ψ′1, ψ
′2 by the corresponding gradient vectors, we immediately obtain
condition (2.10). �
This result shows how we find an optimal update using the updated local solu-
tions, specifically it leads to the updates S1 and Sp given below.
Synchronization approaches: At iteration k,solution x(k) is updated by one of
the following four methods.
• Block Jacobi(BJ) Given the local solutions z(k)i , i = 1 . . . p, form the
block update x(k) = z(k).
• Convex Update: Form the global update using the convex combination
(2.13) x(k)i = (1 − αi)x
(k−1)i + αiz
(k)i
for each block i, where the weights αi satisfy 0 < αi < 1, with∑p
i=1 αi = 1,
and without any optimality imposed it is practical to choose αi = 1/p.
• Line Search (S1): Define search direction d(k) = z(k) − x(k−1), and find
scalar α such that solution x(k) = x(k−1) + αd(k) solves the global mini-
mization:
PVDTLS-S1
(2.14) minα∈R
ψ(α), ψ(α) =‖A(x(k−1) + αd(k)) − b‖2
2
1 + ‖x(k−1) + αd(k)‖22
.

6 HONGBIN GUO AND ROSEMARY A. RENAUT
The solution α is a root of the quadratic equation %1α2 + %2α + %3 = 0,
where
%1 = (d(k))Tx(k−1) · ‖Ad(k)‖2 + (Ad(k))T (r(k−1)) · ‖d(k)‖2,
%2 = ‖Ad(k)‖2 · (β2(x(k−1)) − ‖r(k−1)‖2 · ‖d(k)‖2,
%3 = −(Ad(k))T r(k−1) · (β2(x(k−1)) − ‖r(k−1)‖2 · (d(k))Tx(k−1),
and is chosen such that ψ(α) is minimal. Here we introduce the use of the
residual r(k) = b−Ax(k).
• p−dimensional update (Sp): Search in a p−dimensional subspace Sp
as follows: Consider the update x(k) = x(k−1) +∑p
i=1 γid(k)i , where the
d(k)i = [0, · · · , 0, (z
(k)i )T − (x
(k−1)i )T , 0, · · · , 0]T are the components of the
global search direction, and the parameters γi determine the weight in each
subdirection. We use D(k) to denote the matrix with columns d(k)i , γ the
vector with components γi, and solve the global minimization:
PVDTLS-Sp
(2.15) minγ∈Rp
‖A(x(k−1) +D(k)γ) − b‖22
1 + ‖x(k−1) +D(k)γ‖22
.
By Theorem 2.1, the conditions for optimality yield
((D(k))TATAD(k) − ψ · (D(k))TD(k))γ(2.16)
= (D(k))TAT r(k−1) + ψ · (D(k))Tx(k−1),
where
(2.17) ψ =‖AD(k)γ − r(k−1)‖2
2
1 + ‖x(k−1) +D(k)γ‖22
.
Because p is assumed small relative to n we can assume that problems
(2.16) and (2.17) are small. Again γ is chosen such that ψ(γ) is minimal.
Remark 2.1. A secular equation with ψ as variable can be derived from equations
(2.16) and (2.17). Because we want to minimize the function ψ(x), the smallest
root of the secular equation is of interest. Thus the iteration may be initialized with
ψ0 = 0.
Remark 2.2. Observe that the two search techniques, S1 and Sp, are more general
forms of the update (2.13). In particular S1 corresponds to (2.13) with αi = α, but
without the constraint on each αi, and Sp finds an optimal set of αi in (2.13) each
step to minimize the global objective. Clearly, S1 is the specification of Sp for the

PARALLEL VARIABLE DISTRIBUTION FOR TOTAL LEAST SQUARES 7
case p = 1. As presented the optimal updates S1 and Sp do not impose convexity
which is important for convergence in the LS case, but we will see is irrelevant for
TLS because of its lack of convexity.
Remark 2.3. We do not expect that use of the BJ update at each step would
generate a convergent algorithm. However, as in [19], it may speed up the iteration
if at a given step the BJ update is adopted if it has generated a smaller objective
value than that given by (2.13), and the sequence of objective function values is
decreasing.
2.3. Algorithm.
Algorithm 1. (PVDTLS) Given a tolerance τ and an initial vector x(0), set k = 0,
and calculate r(0) = b− Ax(0). Compute solutions x(k) iteratively until |φ(x(k)) −
φ(x(k−1))|/φ(x(k)) < τ as follows:
(1) While not converged Do
(a) Parallelization (slave processor i):
(i) k = k + 1.
(ii) Calculate b(x(k)i ) = r(k−1) +Aix
(k−1)i .
(iii) Find solution w(k)i of TLS(Ai, bi), and calculate zi using (2.7).
(b) Synchronization (master processor):
(i) Use a global update algorithm to find yopt and update x(k) =
x(k−1) + yopt, where
(2.18) φ(x(k)) < φ(x(k−1)).
(ii) Test for convergence. Break if converged.
(iii) Else Update necessary data values over all processors. Continue.
End Do
3. Convergence analysis
Discussion of convergence for the TLS PVD algorithms is far more complex than
that for the least squares PVD for which the objective function is convex. Consider

8 HONGBIN GUO AND ROSEMARY A. RENAUT
−5
0
5
−4−2024
0
0.2
0.4
0.6
0.8
1
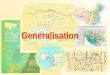
Figure 1. Function φ(x) for (3.19) with maximum point
(2,−1, 1), minimum point (−1,−1, 0.1) and saddle point (0, 1, 0.5).
the following low-dimensional example, for which φ(x) is illustrated in Figure 1.
(3.19)
[A, b] =
−2√6
0 0√
33
1√6
√2
2 0√
33
1√6
−√
22 0
√3
3
0 0 −1 0
∗
1
0.5
0.1
0 0 0
∗
−2√6
0√
33
1√6
√2
2
√3
3
1√6
−√
22
√3
3
T
.
We see that not only is φ(x) not convex but it also possesses saddle points. Fig-
ure 2 illustrates two curves which cross the saddle point (0, 1) of φ(x) for (3.19).
Obviously, if the iteration starts from x(0) = (0, 1), the update will not move from
the saddle point, neither in the parallelization nor the synchronization step, (in the
latter D(1) = 0). Thus, even if the given algorithms converge to some point, this
point may not be at the global minimum, and may be a saddle point which traps
the subsequent iterative updates.
The difficulty exhibited by the example illustrated in Figure 1 is general, as
demonstrated by the following result for the stationary points of the non-concave
function φ(x).
Lemma 3.1. ( FACT 1-8 in [17] ) The Rayleigh quotient of a symmetric matrix is
stationary at, and only at, the eigenvectors of the matrix.

PARALLEL VARIABLE DISTRIBUTION FOR TOTAL LEAST SQUARES 9
−4 −2 0 2 40.25
0.3
0.35
−4 −2 0 2 40.2
0.3
0.4
0.5
0.6
0.7
φ([0,x2]) φ([x
1,1])
Figure 2. Curves crossing saddle point (0, 1) in coordinate direc-
tions, φ((0, x2)) and φ((x1, 1)).
Lemma 3.2. ([20]) If the extreme singular values of the matrix [A, b] are simple
then φ(x) has one unique maximum point, one unique minimum point and n-1
saddle points.
In particular, this result shows that if the iteration defined by the preceding
algorithm starts at a stationary point, the iteration may not converge to the global
minimum of the objective.
3.1. Convergence Proof. First, note that when we relate a right singular vector
vi(1 : n+ 1) of matrix [A, b] to (xT ,−1)T we assume vi(n+ 1) 6= 0.
We use the notation that ∇2i φ(x) is the ni−dimensional Hessian matrix with
respect to xi ∈ Rni . Also, for a bounded sequence {x(k)} with accumulation point
x∗, we use the indices kj , j = 1, 2 · · · for the subsequence {x(kj)} → x∗, when
j → ∞.
Theorem 3.3. Suppose {x(k)} is the sequence generated by Algorithm 1. Then
(1) {φ(x(k)} converges.
(2) If {x(k)} is bounded, any accumulation point, x∗, is a stationary point of
φ(x) and ∇2iφ(x∗) ≥ 0 on the subspace Rni for i = 1, · · · , p.
(3) If {x(k)} is bounded and the singular values of matrix [A, b] are distinct
{x(k)} converges.
Proof. (1) By the synchronization step it is guaranteed that the objective func-
tion decreases with {x(k)}. Moreover, the objective function is bounded
below by 0 and thus converges.

10 HONGBIN GUO AND ROSEMARY A. RENAUT
(2) Because {x(k)} is bounded there exists at least one accumulation point x∗.
Denote φ(x∗) by φ∗. Suppose that this accumulation point is not at a
minimum of φ with respect to its first block component. Then there exists
xnew1 ∈ Rn1 such that
(3.20) φ(xnew1 , x∗
1) < φ∗.
Here 1 denotes the complement of element 1 in {1, · · · , p}, i.e., 1 = {2, · · · , p}.
By the requirement of objective function decrease, however, we must have
φ(x(kj )) ≤ φ(x(kj−1+1))
≤ φ(z(kj−1+1), x(kj−1)
1)
≤ φ(xnew1 , x
(kj−1)
1).
In the limit j → ∞ this yields
φ∗ ≤ φ(xnew1 , x∗
1),
which contradicts (3.20). The same argument applies with respect to the
other block components.
(3) We first prove that {x(k)} has an unique accumulation point provided that
the singular values of matrix [A, b] are distinct. Suppose the contrary, then
there exists two accumulation points x∗ and x∗∗, which by the previous
statement are stationary points of φ(x). Then, by Lemma 3.1, ((x∗)T ,−1)T
and ((x∗∗)T ,−1)T are two eigenvectors of matrix [A, b]T [A, b] corresponding
to two distinct eigenvalues σ2k < σ2
l . Moreover, φ(x∗) = σ2k < σ2
l = φ(x∗∗).
But, by statement (1), {φ(x(k))} converges, φ(x∗) = φ(x∗∗). Thus {x(k)}
must converge to an unique accumulation point. Otherwise, because of
the boundedness of the sequence we could construct another accumulation
point, which by the above is not possible.
�
4. Computational Considerations
We assess the maximal theoretical efficiency of PVDTLS for solution of (1.4)
through analysis of its computational cost in comparison to the traditional serial
direct method and its parallelization using PARPACK [23]. Comparison with indi-
rect techniques, [14], is not so immediate because the cost of each indirect algorithm
depends on both its specific implementation, and the condition of the underlying

PARALLEL VARIABLE DISTRIBUTION FOR TOTAL LEAST SQUARES 11
problem. See, for example, [2] for a thorough discussion of approaches for imple-
mentation of the RQI to solve (1.4). Also, the use of an indirect algorithm for (2.5)
confounds the discussion in this paper, for which the major intent is to assess the
overall viability and stability of PVDTLS for large scale applications. Thus, while
we do not specifically exclude that indirect techniques can be useful for solving
each of the local problems, here we propose the use of a very efficient SVD update
algorithm.
Measuring computational cost only in terms of number of flops, without con-
sideration of any hardware related issues for measure passing, or memory or cache
usage, the direct SVD solution of (1.4) cost is Cs = 2mn2 + 12n3, see Algorithm
12.3.1 in [10]. It is efficient to use this same direct SVD algorithm for the solution
of each (2.5), because the first ni columns of Ai = [Ai, bi] are fixed over all outer
iterations. Hence, having calculated the initial SVD, the SVD update algorithm,
[11], can be utilized, yielding a total local cost Cl(K), where K is the number of
outer iterations to convergence,
(4.21) Cl(K) ≈ 2n2i (m+ 6ni) +K(2ni(m+ 5ni) + 4nim),
Here the last term is the cost of updating b(xi) and generatingAidi as needed for the
global update. The cost of the global update, other than by Sp, is negligible. The
major costs associated with the solution of (2.15) are Lp3/3, where L is the number
of iterations for the minimization, and 2m(p+1) which accounts for the initialization
of the products (AD(k))TAD(k) and (r(k−1))TAD(k). In the implementation, L ≤ 5
is limited under the assumption, verified numerically, that exact global solution each
outer iteration is unnecessary. Hence,
(4.22) CSp(K) ≈ K(2m(p+ 1) +
L
3p3),
and, using L = 5, the total parallel cost used in our theoretical estimates is
Cp(K) ≈ Cl(K) + CSp(K)(4.23)
≈ 2n2i (m+ 6ni) + 2K(5n2
i + 3nim+ (p+ 1)m+5
6p3).(4.24)
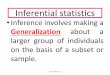
Not surprisingly, there must be a balance between the size of the local problems, in
order to reduce local cost, and maintaining p small enough that p3 stays relatively
small. This is illustrated in Figure 3, in which the maximal efficiency,
(4.25) Eff(p,K) =Cs
pCp(K),

12 HONGBIN GUO AND ROSEMARY A. RENAUT
0 20 40 60 80 100 120 140 160 180 20010
−1
100
101
102
K
effic
ienc
y
p=16
p=8
p=32
p=2
p=4
m=162, n=160.
0 50 100 150 200 250 300 350 400 450 50010
0
101
102
103
K
effic
ienc
y
p=2
p=4
p=8
p=16
p=32
m=3200, n=1600.
0 50 100 150 200 250 300 350 400 450 50010
0
101
102
103
K
effic
ienc
y
m=2050, n=2048
p=2
p=4
p=8
p=16
p=32
Figure 3. Theoretical efficiency of PVD-Sp against number of
iterations to convergence for different problem sizes, ignoring over-
heads of parallel communication and memory access.

PARALLEL VARIABLE DISTRIBUTION FOR TOTAL LEAST SQUARES 13
is calculated for problems of increasing size and different numbers of domain blocks.
Note that ideal efficiency Eff(p) = 1 is potentially exceeded for problems with size
n = O(103), with p <= 32, and 500 � K � 1000.
A standard alternative to the design of a new algorithm for large scale prob-
lems is the parallelization of the most computationally demanding steps of a se-
rial algorithm. Here we consider the cost of PARPACK for the parallel implicit
restart Lanczos method (IRLM), [23],to calculate the smallest eigen pair of ma-
trix [A, b]T [A, b]. We use the default number, 20, of Lanczos basis vectors and
request only one eigenvalue needed for the explicit representation of the TLS solu-
tion. The parallelizable cost of the IRLM includes the initial cost of generating a
20-dimensional Krylov subspace, 20(n+ 1)(4m+ 9 + 2 ∗ 20), and the per iteration
cost of 20(n+ 1)(4m+ (6 + 9) + 4 ∗ 20), [1]. The serial cost in each iteration for 19
implicitly shifted QR steps is 6 ∗ 202 ∗ 19, [10]. Hence the total parallel cost for K
iterations is
(4.26) CIRLMp (K) =
80(K + 1)mn+ (960 + 1900K)n
p+ 45600K,
where, unlike PVDTLS, K is independent of the number of processors. This esti-
mate is used to compare the efficiencies for the numerical experiments reported in
Section 5.
5. Numerical Experiments
5.1. Evaluation of the PVDTLS Algorithms. To evaluate the algorithms we
use both a standard test problem, staar, [24] and a three different versions of a test
problem which can be modified to change the underlying condition of the problem.
In each case the problem size and number of subdomains are chosen so that each
subdomain is of equal size. All tests are run with Matlab 7.0 with x(0) = 0. We
design the test data in such a way that the exact TLS solution xTLS and optimal
objective function value φmin = σ2n+1 are known. For stopping criterion we use
tolerance τ = .00001. In each case we report the number of outer iterations K to
the given convergence, the relative errors of the converged x(K) to xTLS and of the
converged φ(x(K)) to φmin. Each case is tested for solution by Gauss-Seidel and
PVD techniques PVDTLS-S1 and PVDTLS-Sp. A selection strategy, denoted by
“Sel” in the results indicating Selection, is also tested in which at each step the
update chosen is that which gives the greatest reduction in the objective function
when chosen from the local solutions Yi, the BJ update z(k) and the convex update

14 HONGBIN GUO AND ROSEMARY A. RENAUT
given by (2.13). This is consistent with the approach presented for the convex cases
in [6], [19], and permits evaluation of whether the optimal update is necessary for
obtaining a good solution. For the second test problem, the third situation leads
to a case in which one block converges to a poor solution. In this case we evaluate
also the use of truncated TLS for regularization of the local solution on this block.
Test 1.
We consider problem staar [24] form = 162. The Rayleigh quotient is φ(xTLS) =
m, [14] (Chapter 2.4). For all cases the iteration converges to the correct solution
and minimal φ in just two steps.
Test 2.
Based on the sensitivity analysis presented in [9], Bjorck et al. [2] suggest that
the ratio σ′1/(σ
′n − σn+1) be used as an approximate measure of the condition
of a TLS problem. Here σi and σ′i represent the ith singular values of matrices
[A, b] and A respectively. The approximate condition numbers partially reveal the
local structure of the surface of φ(x) near the minimum point. A large condition
number predicts that locally the surface is flat which makes the problem difficult
to solve, while a small condition number indicates that the surface is locally steep.
The TLS condition number for Test 1 is just 30.7, suggesting that staar is rather
well-conditioned. In contrast, the following set up leads to examples with different
condition numbers such as to evaluate PVDTLS with respect to the condition of
the problem.
We construct [A, b] ∈ Rm×(n+1)
[A, b] = UΣV T ,
U = Im − 2χχT ,
V = In+1 − 2ςςT ,
Σ =
Σ1
0
,
where
χ(i) = sin(4πi/m), i = 0, 1, · · · ,m− 1,
ς(j) = cos(4πj/(n+ 1)), j = 0, 1, · · · , n,

PARALLEL VARIABLE DISTRIBUTION FOR TOTAL LEAST SQUARES 15
0 50 100 150 200−0.03
−0.02
−0.01
0
0.01
0.02
0.03
0 50 100 150 200−10
0
10
20
30
40
0 50 100 150 200−10
0
10
20
30
40
50
0 50 100 150 200−10
0
10
20
30
40
50
Figure 4. The four lowest stationary points of φ(x) for Test 2.
The lower right is the solution at the lowest stationary point, xTLS.
and are normalized such that‖χ‖2 = ‖ς‖2 = 1. In the tests we set m = 162 and
n = 160 and Σ1 is one of the following three diagonal matrices:
a: Σ1 = diag(v1, v2, v3, v4, 0.001)), where v1, v2, v3 and v4 are constant row
vectors with length n/4 and values 4/n, 2/n, 4/(3n) and 1/n respectively.
This test has condition 4.76 and φ = σ2n+1 = 1.0e− 6.
b: Σ1 = diag(1, 1/2, · · · , 1/n, 0.001). The condition is 190.5 and φ = σ2n+1 =
1.0e− 6.
c: Σ1 = diag(1, 1/2, · · · , 1/(n + 1)). The condition is 2576 and φ = σ2n+1 =
(1/161)2.
In these examples, the stationary points are all the same, the ith, i ≤ n, of which
is close to [0, · · · , 0, hi, 0, · · · , 0], where hi is a positive number, see Figure 4. In
each example, however, the function values at these stationary points are different.
In turn the matrix spectra are different and the condition increases from Test 2 (a)
to (c). Results of the numerical experiments are detailed in Tables 1-3, in which
x.y(−t) indicates x.y × 10−t and N indicates that convergence has not occured by
the 500th iteration.

16 HONGBIN GUO AND ROSEMARY A. RENAUT
Table 1. Test 2 (a): Outer iteration steps / relative error to φmin
/relative error to TLS solution.
Method p ovlp 0 ovlp 1 ovlp 2 ovlp 5
2 10/ 6.5(−06)/7.5(−04) 10/4.4(−06)/6.6(−04) 10/ 2.5(−06)/5.2(−04) 8/ 3.6(−06)/6.3(−04)
P S1 4 26/3.4(−05)/3.8(−03) 25/2.0(−05)/3.2(−03) 25/3.4(−05)/4.2(−03) 24/2.5(−05)/3.5(−03)
8 54/9.8(−05)/6.8(−03) 50/8.8(−05)/6.4(−03) 49/7.9(−05)/6.1(−03) 46/8.2(−05)/6.2(−03)
2 8/7.3(−07)/2.9(−04) 8/3.9(−06)/8.8(−04) 8/5.7(−07)/3.5(−04) 7/1.7(−07)/1.9(−04)
V Sp 4 2/4.2(−16)/3.7(−12) 2/4.2(−16)/3.7(−12) 2/4.2(−16)/3.7(−12) 2/0.0(+00)/3.7(−12)
8 2/0.0(+00)/3.7(−12) 2/0.0(+00)/3.7(−12) 2/4.2(−16)/3.6(−12) 2/4.2(−16)/3.7(−12)
2 7/7.3(−06)/1.0(−03) 7/3.5(−06)/7.3(−04) 7/1.6(−06)/5.3(−04) 7/1.7(−07)/2.6(−04)
D Sel 4 32/6.4(−05)/5.8(−03) 31/2.8(−05)/3.7(−03) 25/5.6(−05)/5.3(−03) 22/3.3(−05)/3.8(−03)
8 45/1.7(−04)/7.5(−03) 46/4.7(−05)/4.8(−03) 41/6.3(−05)/5.1(−03) 39/9.9(−05)/6.4(−03)
G 2 6/9.1(−08)/1.1(−04) 6/3.1(−07)/2.0(−04) 6/5.2(−08)/7.6(−05) 5/2.5(−08)/5.8(−05)
S1 4 8/2.1(−07)/3.1(−04) 8/5.8(−07)/4.1(−04) 6/8.1(−07)/5.8(−04) 7/1.8(−08)/7.5(−05)
S 8 12/1.2(−06)/7.6(−04) 11/6.4(−06)/1.4(−03) 11/3.3(−06)/1.0(−03) 11/3.7(−06)/1.1(−03)
Table 2. Test 2 (b): Outer iteration steps / relative error to φmin
/relative error to TLS solution.
Method p overlap 0 overlap 1 overlap 2 overlap 5
2 N/7.5(−03)/2.5(−02) 54/3.7(−05)/1.8(−03) 24/9.0(−06)/8.8(−04) 17/1.3(−05)/1.0(−03)
P S1 4 N/2.9(−01)/3.0(−01) 80/5.6(−05)/3.6(−03) 60/2.3(−04)/8.6(−03) 37/1.3(−03)/2.0(−02)
8 N/ 8.2(−01) / 5.1(−01) 442 / 1.8(−02) / 8.1(−02) 338/2.2(−03)/2.9(−02) 225/1.3(−02)/6.7(−02)
2 364/1.4(−03)/1.1(−02) 17/6.9(−07)/2.6(−04) 13/5.1(−07)/2.4(−04) 8/5.0(−06)/1.4(−03)
V Sp 4 N/1.3(−02)/7.2(−02) 57/2.5(−04)/9.2(−03) 28/5.2(−05)/4.6(−03) 24/2.4(−05)/2.9(−03)
8 79/3.6(−04)/1.0(−02) 202/1.0(−03)/1.9(−02) 219/1.4(−03)/2.2(−02) 196/1.2(−03)/2.0(−02)
2 10/1.6(−03)/1.2(−02) 22/1.0(−04)/2.4(−03) 16/4.7(−05)/1.1(−03) 9/9.2(−07)/4.5(−04)
D Sel 4 N/6.8(−01)/5.3(−01) 195/1.1(−03)/1.9(−02) 108/1.2(−02)/5.7(−02) 150/3.1(−04)/9.3(−03)
8 N/1.3(+00)/7.7(−01) N/6.8(−01)/5.4(−01) 465/2.2(−01)/3.1(−01) N/3.9(−01)/3.9(−01)
G 2 33/1.2(−03)/1.0(−02) 14/4.0(−12)/6.4(−07) 8/8.8(−06)/7.2(−04) 5/2.3(−08)/3.3(−05)
S1 4 91/1.3(−03)/1.8(−02) 32/2.8(−04)/8.3(−03) 26/2.3(−06)/7.0(−04) 12/7.1(−06)/1.5(−03)
S 8 119/2.5(−03)/2.7(−02) 73/1.7(−04)/6.5(−03) 67/6.8(−05)/4.6(−03) 69/1.6(−05)/1.9(−03)
Also illustrated in Figure 5 is the estimate of the q-factor in each case, which
demonstrates the q-linear convergence behavior, [15]. Indeed, in most cases the
convergence rate is nearly linear, which is consistent with the result for strongly
convex problems, Theorem 2.3 of [4]. Theoretically, the converged point may be
a saddle point, see Figure 1, but we did not encounter this in any of our tests.

PARALLEL VARIABLE DISTRIBUTION FOR TOTAL LEAST SQUARES 17
Table 3. Test 2 (c): Outer iteration steps / relative error to φmin
/relative error to TLS solution.
Method p overlap 0 overlap 1 overlap 2 overlap 5
2 329/1.9(−03)/9.1(−02) 29/9.2(−05)/2.0(−02) 21/3.2(−05)/1.1(−02) 5/9.1(−04)/1.3(−01)
P S1 4 454/7.7(−03)/5.3(−01) 78/8.4(−05)/7.6(−02) 35/4.5(−03)/4.2(−01) 41/4.3(−05)/4.6(−02)
8 410/1.2(−02)/6.4(−01) 54/8.2(−03)/7.2(−01) 47/8.4(−03)/8.0(−01) 33/8.7(−03)/9.6(−01)
2 6/1.6(−03)/8.4(−02) 14/3.5(−09)/1.3(−04) 10/3.2(−06)/3.7(−03) 6/5.7(−06)/8.8(−03)
V Sp 4 16/6.3(−03)/6.7(−01) 38/3.2(−04)/1.4(−01) 28/2.8(−04)/1.2(−01) 18/6.8(−05)/6.1(−02)
8 20/2.5(−03)/8.0(−01) 8/2.7(−03)/8.3(−01) 9/2.6(−03)/8.0(−01) 10/2.9(−03)/8.1(−01)
2 8/4.4(−05)/2.1(−02) 8/2.0(−05)/1.3(−02) 8/7.9(−06)/1.0(−02) 2/3.4(−02)/7.7(−01)
D Sel 4 3/1.5(−02)/1.1(+00) 10/1.1(−02)/8.6(−01) 48/2.9(−03)/3.7(−01) 157/1.3(−04)/6.9(−02)
8 2/7.7(−03)/1.5(+00) 2/7.7(−03)/1.5(+00) 3/7.7(−03)/1.5(+00) 3/7.7(−03)/1.5(+00)
G 2 24/1.2(−03)/7.4(−02) 10/1.3(−05)/7.3(−03) 5/2.0(−06)/2.6(−03) 4/5.6(−08)/5.8(−04)
S1 4 8/2.2(−01)/2.2(+00) 14/2.6(−02)/1.5 10/4.0(−02)/1.9(+00) 14/1.7(−04)/9.2(−02)
S 8 6/6.0(−02)/6.5(+00) 4/1.1(−01)/9.9(+01) 2/1.1(−01)/8.8(+01) 2/1.1(−01)/6.7(+01)
Instead, we did find some cases that converged to a point which is neither a saddle
nor the true solution. Illustrated in Figure 6 is one such case, Test 2 (c), using
S1 for the global update, with p = 2 and overlap of 5. Here, it is apparent that
the converged solution is close to the true solution, and even iterating to 50000
iterations, the solution is still not improved. This does not contradict Theorem 3.3
because the structure of objective function is so flat near to the true solution that
(2.18) can not be satisfied to double float accuracy. In this case, it is possible to
obtain a solution which does converge with relative error less than 1.0 × 10−11 if
we pick the initial guess as the true TLS solution with 10% noise added.
5.1.1. Discussion. The numerical results show
(1) a simple selection strategy, “Sel”, does not provide satisfactory convergence
behavior for PVDTLS. When the TLS condition number is not small, and
the number of blocks increases, this approach does not succeed, even if
regularization is applied to the “bad” block. In particular it is essential
that the global update is optimized using an approach such as S1 or Sp.
This contrasts the LS case in which convex updates or BJ updates were
often sufficient to maintain satisfactory convergence at less cost than the
optimal recombination global update.

18 HONGBIN GUO AND ROSEMARY A. RENAUT
0 500 1000 1500 2000 2500 3000 3500 4000 4500 500010
−16
10−14
10−12
10−10
10−8
10−6
10−4
10−2
100
102
Test1(b)PVD−S1p=2, ovlp=0q−factor=0.994
0 10 20 30 40 5010
−16
10−14
10−12
10−10
10−8
10−6
10−4
10−2
100
TEst1(a)PVD−Spp=2, ovlp=5q−factor≈0.34
0 20 40 60 80 10010
−20
10−15
10−10
10−5
100
105
Test1(b)PVD−Spp=2, ovlp=5q−factor≈0.60
0 5 10 15 20 25 3010
−12
10−10
10−8
10−6
10−4
10−2
100
Test1(c)PVD−Spp=2, ovlp=5q−factor≈0.42
Figure 5. Convergence history for 4 examples. In each case the
solid line indicates the relative error of x(k) to xTLS (solid) and
the dotted line the relative error of φ(k) to φmin (dots). The ap-
proximate q-factors of linear convergence are also presented.
0 10 20 30 40 5010
−20
10−15
10−10
10−5
100
105
0 20 40 60 80 100 120 140 160−0.03
−0.02
−0.01
0
0.01
0.02
0.03
0.04
true solutioncalculated solution
Figure 6. Test 2 (c), PVD-S1, p = 2, overlap 5. Left: convergence
history, the solid line indicates the relative error of x(k) to xTLS,
the dotted line the relative error of φ(k) to φmin and the crosses the
estimated relative error of objective |φ(x(k)) − φ(x(k−1))|/φ(x(k))
Right: converged solution and true TLS solution.

PARALLEL VARIABLE DISTRIBUTION FOR TOTAL LEAST SQUARES 19
(2) Use of a p-dimensional optimal update reduces the total number of itera-
tions, and is more reliable at obtaining a good converged solution, than the
line search S1, for minimal extra cost, when p is small.
(3) When using a Gauss-Seidel approach, results show that it is essential to do
some global update optimization, as indicated here by use of the line search
S1. Moreover, as for the selection strategy, the Gauss Seidel approach
is not successful when the TLS condition number increases and a given
block needs some regularization. Use of Sp may be useful to improve the
convergence of GS.
(4) As p increases the number of iterations to convergence increases.
(5) Increasing overlap can be used to reduce the number of iterations to con-
vergence.
These latter two results are completely expected for any parallel appproach. The
former results are specific to the PVD for TLS.
Our implementation does not use the forget-me-not term in the global update
as used in [4, 3]. While its inclusion might increase the speed of the convergence,
it would also exclude the use of the efficient SVD update scheme. Moreover, the
formulation as presented, also easily permits, independently of other domains, the
inclusion of regularization for a specific subdomain, [13], [5].
5.2. Comparison with IRLM. To compare with parallel IRLM we also solve the
second test case to achievable accuracy by both the parallel IRLM and PVDTLS-
Sp and evaluate the relative efficiency. We present the number of iterations to find
in each case the best achievable accuracy measured in terms of the relative error
to the true TLS solution. Representative cases for PVDTLS-Sp with overlap of 5,
and 2, 4 and 8 subdomains are given in Table 4. From these results we observe
that the PVD has better achievable accuracy for the Test 2 (b), regardless of the
number of subdomains. Moreover, it is apparent by the high number of iterations
required to achieve a converged solution, that for this specific test subdomain size is
too small when the global problem is split into 8 local problems. The convergence
history for parallel IRLM, shown in Figure 7, confirms that the IRLM does not
improve with iteration after a certain number of iterations. On the other hand, in
terms of accuracy parallel IRLM outperforms PVDTLS in two cases. Moreover the
convergence history for PVDTLS in these cases has also stagnated, Figure 5 (a)-(d).

20 HONGBIN GUO AND ROSEMARY A. RENAUT
0 100 200 300 400 500 600 700 800 90010
−15
10−10
10−5
100
105
Test1cTest1b
Figure 7. Convergence history for Test 2 (b) and Test 2 (c) with IRLM.
Table 4. Best reachable accuracy for PVDTLS Sp with overlap
5 and IRLM: iteration steps / relative error to TLS solution.
Method Test 2 (a) Test 2 (b) Test2 (c)
IRLM 2/5.36(−15) 41/9.61(−12) 814/1.72(−08)
PVDTLS p = 2 25/1.03(−12) 60/9.12(−14) 12/8.71(−05)
p = 4 2/3.67(−12) 161/7.78(−14) 72/9.78(−05)
p = 8 2/3.67(−12) 4446/6.61(−13) 9450/5.48(−05)
MAY NEED SOME OTHER ESTIMATES OF EFFICIENCY - STILL THINK
WE NEED THIS NOT RELATIVE TO Cs but SAY RELATIVE TO P = 2 cases,
or IRLM relative to PVD, as we discussed Table 5 shows the efficiency to reach the
optimal accuracy, demonstrating that parallel IRLM is less efficient than PVDTLS-
Sp for the examples with higher condition number.
STILL NEED TO ADDRESS THIS : However, it cost to much, if not impossible,
to determine whether the converged solution is a saddle point. To do this, we have
to solve the eigenproblem of Hessian matrix with the same size as oringinal problem!

PARALLEL VARIABLE DISTRIBUTION FOR TOTAL LEAST SQUARES 21
Table 5. Efficiency calculated by (4.25) using iteration steps for
which the best accuracy is reached, refer to Table 4.
Method Test 2 (a) Test 2 (b) Test2 (c)
IRLM p = 2 8.02 4.75 0.03
p = 4 7.82 4.61 0.028
PVDTLS p = 2 2.44 1.71 2.90
p = 4 10.26 1.38 2.68
6. Conclusion
We have presented a domain decomposition strategy for solution of the TLS
problem, using PVD techniques combined with optimal global update. The method
can be implemented in a serial GS manner, or a parallel BJ approach. To obtain
a satisfactory convergence history it is essential to optimize the global update at
each outer iteration. The use of inexact local solutions is not needed because the
local solutions use an optimal SVD update scheme. The algorithm can be adapted
to handle problems in which some regularization is needed to on a local subdo-
main because of ill-conditioning of the local problem. As compared to a parallel
implementation of the implicitly restarted Lanczos algorithm, PVDTLS-Sp offers a
viable strategy for those large problems which are also poorly conditioned.
References
1. Z. Bai, J. Demmel, J. Dongarra, A. Ruhe, and H. van der Vorst, Templates for the solution
of algebraic eigenvalue problems: A practical guide, SIAM, Philadelphia, 2000.
2. A. Bjorck, P. Heggernes, and P. Matstoms, Methods for large scale total least squares problems,
SIAM Journal on Matrix Analysis and Applications 22 (2000), no. 2, 413–429.
3. J.E. Dennis and T. Steihaug, A Ferris-Mangasarian technique applied to linear least squares
problems, Tech. Report CRPC-TR 98740, Rice University, 1998.
4. M. C. Ferris and O. L. Mangasarian, Parallel variable distribution, SIAM Journal on Opti-
mization 4 (1994), no. 4, 815–832.
5. R. D. Fierro, G. H. Golub .and P. C. Hansen, and D. P. O’Leary, Regularization by truncated
total least squares, SIAM Journal on Scientific Computing 18 (1997), 1223–1241.
6. A. Frommer and R. Renaut, A unified approach to parallel space decomposition methods,
Journal of Computational and Applied Mathematics (1999), 205–223.
7. G. Golub, Some modified matrix eigenvalue problems, SIAM Review 15 (1973), 318–334.
8. G. H. Golub, P. C. Hansen, and D. P. O’Leary, Tikhonov regularization and total least squares,
Numerical Linear Algebra with Applications 21 (1999), no. 1, 185–194.

22 HONGBIN GUO AND ROSEMARY A. RENAUT
9. G. H. Golub and C. Van Loan, An anlysis of the total least squares problem, SIAM Journal
on Numerical Analysis 17 (1980), 883–893.
10. G. H. Golub and C. van Loan, Matrix computations, third ed., John Hopkins Press, Baltimore,
1996.
11. M. Gu and S. C. Eisenstat, A stable and fast algorithm for updating the singular value de-
composition, Tech. Report YALEU/DCS/RR-966, Yale University, 1994.
12. H. Guo, IRR: An algorithm for computing the smallest singular value of large-scale matrices,
International Journal of Computer Mathematics 77 (2001), no. 2, 89–104.
13. H. Guo and R. A. Renaut, A regularized total least squares algorithm, in Sabine Van Huffel
and Philippe Lemmerling, total least squares and errors-in-variables modeling: Analysis, al-
gorithms and applications, pp. 57–66, Kluwer Academic Publishers, 2002.
14. S. Van Huffel and J. Vandewalle, The total least squares problem: computational aspects and
analysis, SIAM, Philadelphia, 1991.
15. C. T. Kelley, Iterative methods for optimization, Frontiers in Applied Mathematics, SIAM,
1999.
16. N. Masttronardi, P. Lemmerling, and S. Van Huffel, Fast structured total least squares al-
gorithm for solving the basic deconvolution problem, SIAM Journal on Matrix Analysis and
Applications 22 (2000), no. 2, 533–553.
17. B. N. Parlett, The symmetric eigenvalue problem, Prentice-Hall, 1980.
18. B. Philippe and M. Sadkane, Computation of the singular subspace associated with the small-
est singular values of large matrices, Tech. Report 754, IRISA, 1993.
19. R. A. Renaut, A parallel multisplitting solution of the least squares problem, Numerical Linear
Algebra with Applications 5 (1998), 11–31.
20. R. A. Renaut and H. Guo, Efficient solution of regularized total least squares, SIAM Journal
on Matrix Analysis and Applications , to appear.
21. A. H. Sameh and J. A. Wisniewski, A trace minimization algorithm for the generalized eigen-
value problem, SIAM Journal on Numerical Analysis 19 (1982), no. 6, 1243–1259.
22. G. L. G. Sleijpen and H. A. Van der Vorst, A Jacobi–Davidson iteration method for linear
eigenvalue problems, SIAM Review 42 (1996), no. 2, 267–293.
23. D. C. Sorensen, Implicit application of polynomial filters in a k-step arnoldi method, SIAM
J. Matrix Anal. Appl. 13 (1992), 357–385.
24. J. Staar, Concepts for reliable modelling of linear system with application to on-line identifi-
cation of multivariable state space descriptions, Ph.D. thesis, Katholieke Universiteit Leuven,
Leuven,Belgium, June 1982.
Department of Mathematics and Statistics, Arizona State University, Tempe, AZ
85287 1804