Embed Size (px)
Citation preview

Optimal Liability With Stochastic Harms,Judgement-Proof Injurers, and
Asymmetric Information
ROBERT INNES
University of Arizona, Tucson, Arizona, USAE-mail: [email protected]
This paper studies the use of ex post liability to regulate unilateral accidents wheninjurers have (1) different probability distributions for accident damages and, as aresult, different optimal levels of accident prevention effort, (2) private informationabout their damage distributions, and (3) liability that is limited to the injurer’savailable assets. When the asset bound on liability is in a plausible range, an optimaldamage-contingent legal rule is shown to take a threshold form, assessing maximalliability when ex post damages are above a given threshold and zero liability otherwise.© 1999 by Elsevier Science Inc.
I. Introduction
In many cases, parties who potentially cause injuries have better information thanothers about the risks and consequences of accidents that they may cause. Often, theyalso have financial resources that are insufficient to cover victims’ damages fromparticularly harmful accidents. Examples include medical product failures (e.g., , Tha-lidamide and the Dalcon Shield), industrial disasters (e.g., chemical releases such as theone that occurred at the Union Carbide plant in Bhopal, India), and hazardoussubstance releases of the sort covered by the U.S. Comprehensive EnvironmentalResponse, Compensation and Liability Act (CERCLA) (e.g., leakages from under-ground petroleum storage tanks or mine tailing ponds). In practice, such problems areregulated by both ex ante safety standards [e.g., citing and technology standards for theproduction and disposal of toxic wastes, as specified in the U.S. Resource Conservationand Recovery Act (1982)] and ex-post liability [e.g., as assessed under tort law andCERCLA (1980, 1986, 1990)].
I want to thank an anonymous reviewer and Rohan Pitchford for inspired comments on this paper. I am alsoindebted to Dennis Cory, Edna Loehman, John Antle, and seminar participants at Brigham Young University, theUniversity of Arizona, and American Association of Agricultural Economics meetings in San Diego for valuableencouragement and comments on earlier versions. The usual disclaimer applies.
International Review of Law and Economics 19:181–203, 1999© 1999 by Elsevier Science Inc. 0144-8188/99/$–see front matter655 Avenue of the Americas, New York, NY 10010 PII S0144-8188(99)00004-6

This paper studies these types of accident situations. In the analysis, injurers/firmsreduce accident risks by taking “care” and have different optimal levels of care becausethey have different accident damage distributions. The injurers have private informa-tion about their damage distributions and liability that is limited to their available assets.Because firms’ assets are sometimes exceeded by accident damages, the governmentcannot implement a liability rule under which injurers pay exactly the damages thatthey cause and which thereby elicits the care choices that most efficiently mitigateaccident risks.1 Moreover, asymmetric information rules out heterogeneous govern-ment standards on care that would be required to prompt efficient behavior by thedifferent firms.
In an important paper, Shavell (1984) argued that asymmetric information andlimited liability may together motivate joint use of liability regulation and government“safety” standards on permissable levels of care. In doing so, he fixes the liability rule ina model with nonstochastic damages. The present paper, in contrast, posits stochasticdamages, whether because of imperfections in the damage assessment process, inherentrandomness in damage creation, or both. Moreover, the liability rule is endogenized toaddress the following key question: Given that asymmetric information and limitedliability rule out simple resolutions to the problem of optimal accident regulation, whatis the most efficient design—or form—of a liability rule?
Despite a rich literature on liability rules in tort law, these design questions have notyet been studied.2 Recent work, for example, has focused on the problem of providingappropriate incentives for a plaintiff (victim) suit when there is both a costly courtprocess and a desire to achieve a given level of injurer precaution incentive. Such plaintiffincentive considerations lead to optimal award levels [Polinsky and Rubinfeld (1988)],optimal decoupling of plaintiff and defendant liability [Polinsky and Che (1991)], andoptimal penalties to losing plaintiffs [Polinsky and Rubinfeld (1996)]. Other work hasbeen concerned with injurer precaution incentives, but not with their implications forthe design of liability rules [e.g., Png (1987)]. An interesting paper by Spier (1994)studies how to design a liability rule that balances the benefits of efficient precautionand the benefits of cost-saving settlements, but it does not consider the problem ofheterogeneous injurers.3 In sum, despite recent strides in the analysis of legal games,there remains the unanswered question posed for this paper: How, in view of liabilitylimits, can liability be tied to stochastic damage realizations in a way that confrontsdifferent injurers with optimal precautionary incentives?
An injurer’s liability may depend on realized (measured) damages and, in principle,his care level. Because care choices are often complex combinations of precautionarymeasures that are difficult to observe and measure ex post [e.g., see Rose-Ackerman(1991) and Viscusi (1989)], this paper focuses on non-care-contingent liability rulesthat can take any functional form consistent with limited liability.4
1The implications of limited liability for accident regulation are studied in a number of illuminating papers,including Summers (1983), Shavell (1986), Schwartz (1985), Beard (1990), and Boyd and Ingberman (1992).However, to my knowledge, only Shavell (1984) analyzes accident regulation under both limited liability and asym-metric information.
2This literature dates back to the classic papers by Brown (1973), Diamond (1974), and Green (1976), amongothers. Thorough surveys of the field can be found in Shavell (1987) and Landes and Posner (1987).
3The papers cited here are only a few of the many excellent studies on settlement and trial games, the few that aremost closely related to the arguments made in this paper.
4In an expanded version of this paper (available from the author on request), optimal care-contingent liability rulesare also characterized. There it is found that a first-best can often be achieved with a care-contingent legal rule that
182 Optimal liability

Under conditions that often hold for the industrial and environmental accidents thatare of interest here, this setting gives rise to the following optimal liability rule: Ifdamages are above a given threshold, injurers are assessed maximal liability; otherwise,when damages are below the threshold, injurers have zero liability. For example,suppose that firms each have assets of $100,000 and that the threshold is $40,000. Then,if damages are below $40,000, a firm will pay nothing; and if damages are $40,000 ormore, a firm will pay $100,000.5,6
The presence of stochastic damages is crucial to the optimality of this damage thresholdliability rule. For example, consider a world with nonstochastic damages, in which theaccidents of different firms cause different levels of harm, but the harm caused by eachfirm is deterministic once an accident has occurred. In this case, it will be optimal tofine firms for the actual damage they have caused. Low-damage firms will be able to paytheir fines, and high-damage firms—those with damages above their assets—will only beable to pay their assets. This strict liability rule is efficient because it induces the lowerdamage firms to exert the optimal amount of care, and it prompts the higher damagefirms to take as much care as they can be induced to take, even though it is too little.Moreover, the damage threshold rule described above will elicit too little care by firmswith damages below the liability threshold (e.g., $40,000) because these firms paynothing for their accidents; in contrast, firms with damages between the threshold (e.g.,$40,000) and the asset limit (e.g., $100,000) will be prompted to exert excessive care.
With stochastic damages, these arguments no longer hold. For instance, suppose thatthe harm from a firm’s accident is continuously distributed in the interval from $1 to$150,000 according to a positive density, with the distribution of harm being “higher”for some firms (high-damage) than for others (low-damage). In this situation, strictliability always prompts too little care by sometimes assessing too little liability (whendamages are above the $100,000 asset limit) and never assessing too much. A damagethreshold liability (DTL) rule helps to cure the problem of too little care by sometimesimposing liability that is higher than harm. For some firms, however, the above-harmliability—if unmatched by a relaxation of liability for other levels of harm—will promptexcessive levels of care. The DTL rule mitigates this problem by requiring no paymentfor harms below the threshold. Although low-damage firms gain most from the zero-liability portion of the DTL rule (because they are more likely to cause damages belowthe threshold), they also pay their assets when the realized harm is above the threshold;indeed, because they are more likely to have harms between the threshold (e.g.,$40,000) and the asset level (e.g., $100,000)—whereas high-damage firms are morelikely to have harms above the asset level, when accidents are necessarily underpenal-ized—low-damage firms are often more subject to the overdeterrence problem createdby the above-harm liability than are high-damage firms. In sum, although a DTL rulewill clearly underpenalize low-damage firms when damages are deterministic, it often
resembles a rule of comparative negligence, wherein a firm’s proportionate liability declines with its care level. Theseresults build upon the important insights of Rubinfeld (1987).
5This liability rule has a simple negligence interpretation. When liability does not depend explicitly on ex ante carelevels, negligence may be thought to have occurred when damage realizations are sufficiently high; in this event, a courtor government may conclude that the prospective damages from an accident were sufficiently large that the injurer wasnegligent in allowing the accident to have occurred. Such negligence calls for the assessment of liability, while theabsence of negligence exempts a firm from liability.
6In a model with legal error and costs of court care, Rasmusen (1995) shows that optimal liability may sometimesbe discontinuous in the damage level, jumping from a low level of liability to a high level of liability when harm risesonly slightly. The optimal liability rule in this paper has a similar property, but is optimal for entirely different reasons.
183INNES

overpenalizes these firms when damages are stochastic. It is precisely when this occurs—when the damage threshold rule tends to overpenalize low-damage firms and under-penalize high-damage firms—that this rule will be optimal.
In general terms, a DTL rule is distinguished from other liability functions by theproperty that it maximizes liability when damages are high and minimizes liability whendamages are low. Among liability rules that deliver a common level of precautionaryincentive to some low-damage firm, DTL penalizes higher damage firms—those firmsthat have higher probabilities of creating high damages—as much as possible. More-over, limited liability often precludes the assessment of sufficient accident penalties onthe high-damage injurers—those that have higher probabilities of creating accidentdamages above the asset bound. In such cases, care-exertion incentives can be enhancedby the use of a DTL rule that, although providing a requisite precaution incentive tolow-damage firms, gets the high-damage injurers expected liability as high as possibleand, hence, as close as possible to their expected damages.
In practice, there are many examples of liability rules akin to that characterized in thispaper. For instance, in the United States, both federal and state environmental lawsrequire firms to report their own violations, providing liability protections when they doand imposing nonreporting penalties when they do not. In general, however, theliability protections are only available when the violations do not involve serious harm topublic health or to the environment; in essence, the self-reporting laws exempt “smalldamage” violations from liability and do not exempt “large damage” violations.7 Simi-larly, CERCLA distinguishes between “major” and “minor” accidents when it assessesliability for hazardous substance releases. Major accidents are subject to more onerousdamage assessments that include lost passive use values; minor accidents are exemptedfrom both exhaustive damage assessments and from liability for passive-use damagesthat often represent the bulk of environmental harm.8 In regulating agricultural pol-lution, Arizona laws also distinguish between “egregious violations” that are subject toasset-liquidating penalties and nonegregious violations that are exempted from thepenalties, with an “egregious violation” judged by the extent of harm that it causes[Cory (1997)]. In all of these cases, liability assessments exhibit the central qualitativeattribute of this paper’s damage threshold rule, subjecting violators with damages abovea threshold to large liability, while treating violators with damages below the thresholdto much lower, and often negligible, penalties.
The balance of the paper is organized as follows. Section II develops the modelframework and is followed by derivations of the paper’s main results in Section III.Section IV discusses a variety of extensions and implications of the analysis, includingthe scope for ex ante safety standards to improve on liability regulation alone.
II. The Model
Consider a set of risk-neutral firms/agents that engage in activities that can lead todamaging accidents. Firms are distinguished by their type, t, with higher t levelsassociated with higher accident damages in a sense made precise below. In the popu-
7For example, see von Oppenfeld (1996) for discussion of Federal law, and Anderson (1996) and ADEQ (1996) forrelevant discussions of State law.
8In the Exxon-Valdez case, for example, economists estimated lost active use values to be approximately $4 millionand lost passive use values to be in the range of $3 to 5 billion [Randall (1993)]. See Grigalunas and Opaluch (1988)for a detailed discussion of damage assessment procedures under CERCLA.
184 Optimal liability

lation of firms, t has the relative frequency (density) q(t), which has positive support on[t, t#]. Firms have private information about their type.
A type t firm either engages in the accident-related activity or does not operate. If afirm operates, it can exercise care that reduces the probability that an accident willoccur. The level of care will be denoted by x, which has the nonempty and compactfeasible set, X 5 [0, x#]. The probability that a type t firm has an accident is p(x, t), wherepx( ) , 0 and pxx( ) . 0 (care reduces accident risk at a decreasing rate). Excludingaccident-related costs, a type t firm obtains a net expected benefit of p(x, t), wherepx( ) , 0 and pxx( ) ¶ 0 for all x . 0 (care is increasingly costly).9 p( ) and p( ) areboth twice continuously differentiable, with an arbitrary dependence on the firm typeparameter t.10
When an accident occurs, damages to other parties are d, where d is the realizationof a random variable that has the positive and twice continuously differentiable densityfunction h(d; t) on the support [d, d#]. Higher t types have “higher” damage distribu-tions in the sense of the monotone likelihood ratio property (MLRP) [see Milgrom(1981)]11:
]
]dSht~d; t!
h~d; t!D . 0 ; ~d, t!. (1)
Condition (1) implies that expected damages, E(d; t), are increasing in t.When an accident occurs, the courts will assign liability to the injurer that is assumed
to depend only upon ex-post damages, l(d). A type t firm’s expected accident liabilitythus equals p(x, t) E(l(d); t), where E( ) is the expectation operator over damages.Given the liability rule l(d), each firm chooses its care level to maximize its net benefits:
maxx [ X
$p~ x, t! 2 p~ x, t! E~l~d!; t!% (2)
The solution to (2) will be denoted by x(l, t). For simplicity, it will be assumed thatx(l, t) is in the interior of X, the feasible care-choice set, for all firm types and all feasiblenonzero liability functions l(d).12 A firm will operate if and only if its net expectedbenefit from operation—the maximal net profit in equation (2)—is non-negative.
Under “pure” strict liability, l(d) equals d and, hence, each firm will pay the true expost damages; optimal (first-best) care choices and operation decisions will thus ensue.The main purpose of this analysis is to study implications of limited firm liability for the
9Any victim precaution measures are assumed to be fixed at their optimal levels to focus attention on injurerincentives for accident prevention. For the same reason, I abstract from multimarket effects and potential efficiencycosts of imperfect competition [e.g., see Sunding and Zilberman (1996)].
10When turning to entry and entry-deterrence effects of optimal liability in the third part of Section IV below, I willconsider possible restrictions on the nature of the dependence of p( ) and p( ) on t.
11The MLRP condition (1) holds for a wide class of distributional specifications and is a somewhat strongercondition than first-order stochastic dominance (FOSD) of higher t (versus lower t) damage distributions [Milgrom(1981)]. The MLRP is closely related to FOSD in the following sense: The MLRP holds if and only if FOSD holds forany possible conditional distribution for d [see Whitt (1980)]. The MLRP also implies that the outcome variable d canserve as a signal of firm type in that higher realizations of d imply a higher damage type [Milgrom (1981)].
12A nonzero liability function assesses strictly positive liability on a nondegenerate interval of the damage support,[d, d#]. With such functions, sufficient conditions for interior care choices, x(l, t) [ (0, x#), are: px(0, t) 5 0(infinitesimal care is approximately costless) and lim x 3 x# px(x, t) 5 2` (the marginal cost of maximal care isarbitrarily large).
185INNES

structure and effects of an optimal legal rule in the presence of asymmetric information.Therefore, it is assumed that strict liability cannot always be assessed because ex postdamages sometimes exceed the firm assets that are available for damage payment:
y 5 level of firm assets , d# . (3)
Although (3) defines a nonstochastic asset level, y can be interpreted as the meanlevel of ex post assets. With this interpretation, the following analysis constrains assets tobe stochastically independent of damages. In a related vein, it is assumed that y isinvariant to the firm’s type t. This assumption is made to focus the analysis on a legalrule that depends only on the damage assessment d and not on firm assets, y, except tothe extent that y limits the firm’s liability.13,14 If the firm’s monetary profits are includedin its assets, this specification requires that net firm benefits p(x, t) equal the differencebetween an exogenous profit/asset measure and a nonmonetary effort cost c(x, t).15
Given the asset level y, limited liability constrains the legal rule to satisfy: l(d) ¶ y @
d. Hence, by the assumed inequality in (3), pure strict liability is infeasible. It is alsoassumed that l(d) must be everywhere non-negative (so that injurers cannot be re-warded for accidents) and piecewise continuous (to ensure existence of the expecta-tion, E(l(d); t)).16 The feasible set for l(d) is thus defined as L 5 {1:0 ¶ 1(d) ¶ y andl( ) is piecewise continuous over the domain, [d, d#]}.
III. The Optimal Legal Rule
An optimal legal rule elicits care choices and operation decisions that maximize the sumtotal difference between firms’ expected profits and the expected costs of accidents:
max1
ET~l!
@p~ x~l, t!, t! 2 p~ x~l, t!, t! E~d; t!#q~t!dt s.t. 1 [ L ~l is feasible! (4)
where x(l, t) is the t-firm care choice under l(d), as described in (2), and
T~l ! 5 $t [ @t, t##:p~ x~l, t!, t! 2 p~ x~l, t!, t! E~l; t! > 0% 5 set of operating firms.
Under circumstances that are often likely to hold, this section will show that asolution to problem (4) must take the following DTL form:
13Beard (1990) analyzes an interesting model in which a firm’s ex ante care costs are deducted from a firm’s “no-careassets” to obtain the ex post assets available for damage payment. In the context of the present model, such aspecification would yield t-specific assets (or asset distributions) unless firms have common care levels. To avoidconditioning liability on assets as a mechanism to condition liability on the firm’s t-type, this paper abstracts from theissues addressed in Beard (1990).
14For a variety of reasons, there may be liability limits other than asset bounds. For example, a tighter (lower)liability limit may be motivated by firm costs of financial distress or a prohibition on confiscatory judgements (whichmay limit liability to a multiple of damages). For simplicity, I appeal to the simplest possible upper liability bound here,although the paper’s qualitative results are robust to other bounds.
15Alternately, this specification can be motivated by an ability of firms to pay out profit flows to their owners (asdividends, for example), leaving the asset level to be driven by operation requirements rather than profits. (I amindebted to the referee for these observations.)
16Given that l(d) is bounded on a compact set (0 ¶ l(d) ¶ y @d[ [d, d ]), a sufficient (but not necessary) conditionfor piecewise continuity is the restriction that a higher damage realization not be rewarded with lower liability; that is,if l(d) is constrained to be monotone nondecreasing, it will also be piecewise continuous.
186 Optimal liability

l~d! 5 lT~d; do! 5y when d . do
0 when d < do
(5)
for some critical do [ [d, d#]. The DTL rule lT(d; do) assigns maximal liability whendamages are above a given threshold and zero liability otherwise.
Optimality of the DTL rule can be established using the following five-step argument.(A more formal development of the argument can be found in the Appendix.)
First Step
Loosely speaking, the objective of problem (4) can be met by a legal rule that confrontseach firm with an expected ex post liability, E(l(d); t), that is as close as possible to thetrue expected ex post damages caused by the firm’s accident, E(d; t). Firms will thenchoose care levels that are as close as possible to their first-best levels,
x*~t! 5 argmax$p~ x, t! 2 p~ x, t! E~d; t!%.
In addition, a firm’s net benefit from operation, p( ) 2 p( )E(l( ); t), will be as closeas possible to the net social benefit from its operation, p( ) 2 p( )E(d; t), thusminimizing the extent to which firms operate or do not operate when it is sociallyinefficient for them to do so.
Given this logic, a necessary condition for optimality is that there be no other feasiblelegal rule l(d) that yields expected liability levels which are closer to expected damagelevels for all firm types. The object of the following arguments is to show that only a DTLrule can satisfy this necessary condition. For example, suppose that y ¶ E(d; t), that is,the asset level is so small that no injurer can be assessed liability amounts that, onaverage, cover the actual damages from an accident. Then liability should always be setas high as possible to make firms’ expected liabilities as close as possible to theirexpected damages. The optimal liability rule thus takes an extreme DTL form, l(d) 5y @ d.
A more interesting case arises when y . E(d; t); that is, some firms have assets that aresufficient to cover their expected accident damages, whether because expected dam-ages are sufficiently modest or because asset bounds are not exceedingly tight. Eventhough accident damages may sometimes be very large, so that limited liability is aconstraint in the sense of equation (3), this second case is likely to hold in most of theindustrial accident situations that are of interest in this paper. Because this case providesthe analytical challenge here, it is assumed to hold in what follows.
Second Step
Under an optimal legal rule, some firm type to pays exactly its expected damage when anaccident occurs. If this were not true, then because the expected liability function, E(l( );t), is continuous in the firm type t, either all firms would pay more than their expecteddamages or all would pay less. As a result, all firms’ expected liabilities could be setcloser to their expected damages by either a proportionate reduction in liability or afeasible increase in liability.17 By the “first-step” arguments above, such changes wouldincrease efficiency.
17This argument implicitly relies upon my premise that y . E(d; t). Liability increases are then possible with any rulethat underpenalizes all firms.
187INNES

Third Step
Consider two possible candidates for an optimal liability rule, both of which satisfy the“second step” necessary condition for optimality—confronting a given to firm withexpected liability equal to its expected damages. The first is a DTL rule, which I willdenote by l T
o (d). The second is an arbitrary nonthreshold rule, l Ao (d) (A for “alterna-
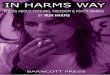
tive”). As depicted in Figure 1, it can be shown that the threshold rule l To (d) yields
higher expected liability for t types above to and lower expected liability for t types belowto. The reason is as follows: As shown in Figure 2, a move to the threshold rule reducesdamage payments in low-damage states, wherein low t firms have relatively moreprobability weight, and increases these payments in high-damage states, wherein high tfirms have relatively more probability weight. When these shifts are chosen to preservethe expected liability to a type to firm, they will thus increase (decrease) the expectedliability to higher (lower) t firms.18,19
18The MLRP equation (1) is crucial to this argument. Under the MLRP, if a higher t level implies a greaterprobability weight on some damage levels below do, it must also imply a proportionally larger increase in probabilityweight on damage levels above do. Hence, when one shifts liability from low- to high-damage realizations so as topreserve the to firm’s expected liability, the expected liability to higher t firms, t . to, rises. By concentrating liability
FIG. 2. Feasible liability rules.
FIG. 1. Expected liability under alternative legal rules.
188 Optimal liability

Fourth Step
Suppose that the threshold rule l To (d) yields high t firms (t . to) an expected liability
that is less than their expected accident damages and, conversely, yields low t firms (t ,to) an expected liability that is higher than their expected damages (see Figure 1). Thena move from l A
o (d) to l To (d) will uniformly reduce the divergence between expected
liability and expected damage. By the preceding three-step argument, the DTL rule willthen be optimal because, among all feasible legal rules that preserve firm to’s expectedliability, DTL yields the highest expected liability for firms with t . to and the lowestexpected liability for firms with t , to.
Fifth Step
The key premise underpinning this argument—and the resulting optimality of a DTLrule—is that DTL overpenalizes low-damage firms and underpenalizes the high-damagefirms, as depicted in Figure 1. The fifth and final step in the argument is to describeconditions under which this premise is valid.
To this end, Figure 3 compares a DTL rule to a strict liability rule that, if feasible,would confront all firms with exactly their average damages. Three differences betweenthese rules determine the extent to which firms are overpenalized or underpenalized bythe DTL rule: (1) limited liability for high levels of harm (in Region DA) underpenalizes(underdeters) accidents; (2) above-harm liability for intermediate levels of harm (inRegion DB) overpenalizes accidents; and (3) zero liability for low levels of harm (inRegion DC) underpenalizes accidents. By the design of the DTL rule, these three effectswill exactly balance out for the to firm, thus confronting the firm with exactly its averagedamages. However, for lower damage (t , to) and higher damage (t . to) firms, the
as much as possible in the high damage states, as is done by a damage threshold rule, the higher t firms’ expectedliability is thus maximized.
19The proof of this observation draws from arguments developed in Innes (1990). There, “live-or-die” financialcontracts concentrate the borrower’s rewards as much as possible in high-profit states and thereby maximize theborrower’s reward from higher (profit-improving) effort choices. Similarly, I show in the present paper that a liabilityfunction which concentrates payments as much as possible in high-damage states maximizes the firm’s cost of havinga “higher” damage distribution.
FIG. 3. DTL vs. strict liability.
189INNES

DTL rule’s incentive impacts are more complicated. To understand them, let ussuppose that the underdeterrence effect of zero liability, effect 3, is either relativelysmall or approximately the same for all firm types; then we only need to consider theother two impacts of threshold liability.
Turning first to the low-damage (t , to) firms, note that they have relatively moreprobability weight on the lower damage Region DB, and less weight on the high-damageRegion DA, than does a to firm. Therefore, the overdeterrence effect of above-harmliability will be stronger than for the to firm, the underdeterrence effect of limited liabilitywill be weaker, and because the DTL rule charges the to firm exactly its average damages,it will overpenalize (overdeter) accidents by the low-damage (t , to) types. Conversely,higher damage firms have relatively less probability weight on the lower damage RegionDB, and more weight on the high-damage Region DA; hence, the DTL rule will under-penalize (underdeter) accidents for these firms. In sum, when the underdeterrenceeffect of zero liability is sufficiently small, firms’ expected threshold liability and averagedamages are related in the presumed way (Figure 1).20
The final question thus becomes: when is the zero liability effect “small” or constantacross firms? There are three related answers to this question. First, if a higher t levelimplies a change in probability weight primarily from intermediate damage states(those in region DB) to high-damage states (those in DA), then the underdeterrenceeffect of zero liability in the lowest damage DC states will be approximately constantacross firms. Second, if the asset bound y is sufficiently small, then for the DTL rule toconfront the to firm with its true expected damages, there must be a correspondinglylow do threshold above which the DTL rule assesses (maximal) liability; as a result, theDC region in Figure 3—and the attendant zero liability effect—will be correspondinglysmall. Third, the same logic applies when there is a greater preponderance of higherdamage firms, those with expected damages that are relatively close to the asset boundy. In this case, an optimal DTL rule will again set the do threshold at a relatively low levelto confront the preponderance of firms with expected liabilities that are closer to theirtrue average damages.21
What follows is a sufficient condition for the foregoing circumstances to imply thedesired (Figure 1) premise—that the DTL rule overdeters low-damage firms, underde-ters high damage firms, and is, therefore, optimal:
CONDITION 1: Because of their higher expected damage levels, higher t types must be found liablein more (lower) damage states for the equation (5) DTL rule to cover their expected damages.22
20If the underdeterrence effect of zero liability is not small or approximately constant across firms, then it will bestronger for low damage firms who have more probability weight in the lowest damage DC region. As a result, the lowdamage (t , to) firms need not be overpenalized by the DTL rule and, hence, the Figure 1 relationship betweenexpected threshold liability and expected damages need not hold.
21The appendix verifies that these circumstances imply the desired (Figure 1) relationship between expectedthreshold liability and damages (see Lemma 5).
22Stated more precisely, Condition 1 has “weak” (less onerous) and “strong” forms, either of which is sufficient forour desired (Figure 1) premise to hold. Formally, let t 1 denote the maximum t level such that firm assets can coverthe firm’s expected damages, t 1 5 max{t [ [t, t#]:y Ä E(d; t)}. For t levels no greater than t 1, let do(t, y) denote theDTL damage threshold that equates a t type firm’s expected liability with its expected damages, do(t, y) 5 do:E(lT(d;do) 2 d; t) 5 0. Condition 1 can then be stated as follows: (C1)(a) (Weak Form.) Given an optimal level of to, do(t,y) Ä do(t0, y) for all t , to, and do(t, y) ¶ do(to, y) for all t [ (to, t 1]. (C1)(b) (Strong Form.) For all t [ [t, t 1), ]do(t,y)/]t ¶ 0.
190 Optimal liability

Condition 1 implies that our candidate DTL rule l To (d), by confronting the to firm
with its actual expected damages, assesses liability less frequently than is needed toconfront a higher damage (t . to) firm with its higher average damages; the high t firmsare thus underpenalized. Conversely, low-damage firms are overpenalized. Thus, wehave:
PROPOSITION 1: If Condition 1 is satisfied, an optimal legal rule will take the damage thresholdform of equation (5).
Although Section IV below discusses cases in which Condition 1 is violated, the follow-ing example illustrates circumstances under which this key condition will hold, verifyingsome of our earlier intuition.
Example
Suppose damages are exponentially distributed with mean parameter at:
h~d; t! 5 ~at!21 exp~2d/at! N H~d; t! 5 1 2 exp~2d/at! ; d > 0,
where a . 0. Then the following is the threshold level do such that the associated DTLrule confronts the t type firm with exactly its average damages
do~t, y! 5 @ln~ y! 2 ln~at!#at 5 do: E~lT~d; do! 2 d; t! 5 0. (6)
Differentiating (6) gives the following statement of Condition 1 (in a strong form):
y < exp~1!~at! 5 2.718 E~d; t! N ]do~t, y!/]t , 0 ; t [ ~t, t##. (7)
Roughly speaking, if the liability limit is less than treble the expected damages of theleast-damaging firm, a DTL rule will be optimal.
Condition 1, in a weaker form, imposes two less onerous requirements (see note 22):(1) ]do(t, y)/]t ¶ 0 at t 5 to,
y < exp~1!~ato!; (8)
and (2) under the optimal DTL rule, the lowest damage firm type, t, has an expectedliability that is no lower than its expected damages,
E~d 2 lT~d; do~to, y!; t! 5 at 2 y exp@~ln~ato! 2 lny!~to/t!# < 0.23 (9)
For instance, suppose that (1) t 5 1 and t# 5 5, so that the highest damage type has fivetimes the expected damages of the lowest damage type, and (2) at t 5 4, E(d; t) 5 y,so that only the very highest firm types, t . 4, have expected damages above their assets.Then both equations (8) and (9) will be satisfied if the optimal to equals at least two.24
A DTL rule will thus be optimal provided there is a sufficient preponderance of firmsin the interval, t [ [2, 5], rather than the interval [1, 2). If to is less than 4 (becausethere is a sufficient preponderance of profitable firms in the interval t [ [1, 4]), the
23Equations (8) and (9) are clearly necessary for the “weak form” of Condition 1 to hold (see note 22). An expandedversion of this paper (available on request) shows that they are also sufficient.
24With t 5 1, E(d; t 5 4) 5 y (so that y 5 4a), and to 5 2, (8) is satisfied with inequality and (9) holds with equality.Because the right-hand-side of (8) rises with to and the derivative in (9) falls with to [given the inequality in (8)], (8)and (9) also hold for to . 2.
191INNES

optimal DTL rule also exempts firms from liability in some low-damage states (settingdo . d).
The restrictions described in this example, equations (8) to (9), are rather mild inview of the paper’s premise that liability limits are a problem for the regulation ofaccidents. This premise is supported by the work of Ringleb and Wiggins (1990), whohave documented U.S. firms’ exploitation of bankruptcy laws to reduce their exposureto potential damage assessments. This exploitation has been manifested in the organi-zation of smaller corporate entities that have smaller maximal liability. Beyond observedefforts to reduce y, there are potential constitutional and economic motivations forliability limits that are serious bounds in the sense of Condition 1. On the constitutionalside, it can be argued that exceedingly large liability assessments would be confiscatory;particularly in view of imperfections in the damage assessment process (with well-respected economists, for example, deriving quite different damage estimates), thisargument may favor a liability limit linked to a measure of expected damages, much assuggested in the above example.25,26 On the economic side, deadweight costs of bank-ruptcy, costs that are incurred when firms face financial distress, may motivate liabilitylimits that are tighter than a restriction to available assets.
In sum, Condition 1 describes cases in which the liability limit is not exceedingly laxand the equation (5) damage threshold rule is uniquely optimal. If a sufficiently largeproportion of firms have expected damages above the asset bound, E(d; t) . y, this rulewill set liability uniformily equal to assets; however, if most firms’ average damages do notexceed their assets—even though their damage realizations may often do so—zeroliability will be assessed when damages are sufficiently low.
IV. Extensions and Implications
This paper has characterized an optimal liability rule for injuring firms/agents that (1)can have unilateral accidents that cause stochastic damages to victims, (2) can reducethe likelihood of an accident by taking ex ante care measures, (3) have private infor-mation about their damage distributions, and (4) have liability that is limited to theiravailable assets. When the liability rule cannot depend on care choices and the liabilitylimit is in a plausible range—neither too tight nor too loose relative to expectedaccident damages—an optimal legal rule is shown to take a damage threshold form,assessing maximal liability when ex post damages are above a given threshold andassessing zero liability otherwise.
In closing, let me comment on several extensions and implications of this analysis.
Ex Ante Safety Standards
Many scholars have been interested in whether or not economic efficiency can beenhanced by the joint use of ex post liability regulation and ex ante safety standards that
25It is also worth noting that imperfections in the damage assessment process give rise to an added economy of theequation (5) DTL rule. When damages are hard to measure, DTL economizes on the extent to which this measurementneeds to be made in assessing liability; rather than requiring that the specific damage level be identified, implemen-tation of DTL only requires that the damage level be identified as lying in one of two ranges.
26Suppose that liability limits are linked to ex post damage levels, such as l(d) ¶ min(g(d), y), where g(d) is somedamage multiple (e.g., g(d) 5 3d). Then, assuming that an appropriate analog of Condition 1 holds, the foregoinganalysis implies that an optimal non-care-contingent legal rule will take the equation (5) DTL, form with y replaced bythe augmented liability limit, min(g(d), y).
192 Optimal liability

directly require all firms to exercise care at or above a minimum level. Shavell (1984)studies the desirability of using safety standards in an accident regulation model thatalso features limited liability and asymmetric information.27 In doing so, Shavell positsboth an exogenous postprosecution legal rule (strict liability) and an exogenous prob-ability of prosecution that is less than 1. In this setting, each firm is confronted with anexpected accident penalty that is no greater than the prosecution probability times thetrue expected damage and, hence, is strictly less than the expected accident damage.Because liability underpenalizes all firms, all firms also exert too little care. By raisingsome firms’ care levels, ex ante safety standards can increase efficiency.
Here, however, the legal rule is endogenous and, although not explicitly modeled,permits a nonunity probability of prosecution, r [ (0, 1]. Specifically, if l P(d) is thepostprosecution liability rule, then the preprosecution liability rule characterized hereis l(d) 5 l P(d) r. Implicitly, therefore, this analysis permits the legal rule to compensatefor imperfect prosecution. For example, a strict liability rule in this paper, l(d) 5 d,compensates for imperfect prosecution by assessing “super-strict” postprosecution lia-bility l P(d) 5 d/r, rather than setting l P(d) 5 d as in Shavell (1984). In Shavell’s model,“super-strict” liability would elicit first-best care choices from all lower damage firms,thus removing the inadequate liability motivation for imposing care standards on thesefirms.
More generally in this paper’s model, Condition 1 implies that low-care firms are thelow t types that are assessed excessive liability and, hence, that exert too much care.28
An ex ante standard can make matters worse by compelling these firms to exert yet morecare. If the care standard were set sufficiently high—namely, above the first-best carelevel for the to firm that receives an expected liability assessment equal to its expecteddamage—then the standard can also have the beneficial effect of compelling somehigher t firms to exert more care. However, the same end can often be met at lower costby revising the liability rule and having no ex ante safety regulation. This argument isillustrated in Figure 4, where an initial liability rule sets to 5 toA and yields care choicesx A. Together with the care standard xs, the initial liability rule yields the care choicesdepicted in bold. Now consider replacing this liability-cum-standard policy with aliability-only policy that, relative to the initial liability rule, raises to from toA to toB asindicated. The new toB is selected so that the first-best care level of the toB firm equalsthe standard, xs. This change in liability would be achieved by lowering the criticaldamage level below which no liability is assessed, do; liability would thus be assessedmore frequently, leading to the higher care choices, x B, as depicted in the figure.Comparing the new care choices, x B, with those under the liability-cum-standard policy,one sees that care falls for the low-damage firms that exert excessive care and that care risesfor the high damage firms that exert too little care. The new liability-alone policy is, hence,more efficient that the standard-cum-liability policy.
This last argument hinges on an implicit assumption that the threshold damage level,
27See also Kolstad et al. (1990), Calfee and Craswell (1984), and Craswell and Calfee (1986). Like Shavell (1984),these papers posit a fixed liability rule (i.e., negligence), but unlike Shavell (1984), motivate their analysis withuncertainty in the legal process [as in Edlin (1994)]. For other important work on the relative merits and potential jointuse of ex ante regulation and ex post liability, see Wittman (1977), White and Wittman (1983), Viscusi (1989), andRose-Ackerman (1991).
28In this discussion, I am implicitly ruling out implausible cases in which care choices decrease with increases inexpected damages. My expanded paper presents a complete analysis of safety regulation, including cases in which carechoices decline with the firm’s t type. For these cases, care standards are shown to be optimal complements to liabilityregulation.
193INNES

do, can be lowered. In other words, it is presumed that the legal rule does not set liabilityuniformly equal to the asset bound. However, if a sufficiently large proportion of firmshave expected damages above the asset bound, E(d; t) . y, an optimal policy will assessmaximum possible liability and care standards may sometimes enhance efficiency byrequiring higher care exertion by the plentiful high-damage firms that are assessed toolittle liability, even under the “maximum liability” rule. In sum, the conclusion that exante safety standards are necessarily welfare decreasing is limited to the cases of mostinterest in this paper, those that lead to optimality of a nondegenerate damage thresh-old rule, one that sometimes assesses zero liability because there is not a sufficientpreponderance of firms with expected damages above the asset bound.
The following general conclusion is suggested: If there is imperfect prosecution anda strict liability legal rule in which multiple damages cannot compensate for imperfectprosecution, then ex ante safety standards will be an optimal complement to ex postliability in the regulation of accidents [Shavell (1984)]. Safety regulation will also bedesirable if there is a preponderance of potential injurers whose average accidentdamages are so large that they substantially exceed their available assets. However, if thelegal rule can be adjusted to achieve efficiency objectives and, in addition, most firms’average damages do not exceed their assets—even though damage realizations may oftendo so—then ex ante safety standards are unlikely to be justified by limited liability.
Linking Liability to Wealth
There has been recent debate about the relative merits of tying damage awards toavailable injurer assets. Citing principles of justice and an absence of economic logic,Abraham and Jeffries (1989) argue against such ties when injurers have heterogeneousasset/wealth endowments. However, this analysis provides a possible economic motiva-tion for linking damage awards to assets. In particular, suppose there are differentasset/y classes of firms, with firms’ asset levels uncorrelated with their t-types (so as toavoid the most obvious argument for linking liability to assets). Then, for each y level,the foregoing arguments apply and a DTL rule is optimal under the conditions de-
FIG. 4. Ex ante safety standards with a standard of xs . x*(to).
194 Optimal liability

scribed above. In moving from a lower y class of firms, y 5 yo, to a higher y class of firms,y 5 y1 . yo, and by increasing the liability assessment for the higher y firms from yo toy1 (fixing to), the expected DTL liability function in Figure 1 will pivot closer to theexpected damage function; hence, by tying liability to the higher y firms’ asset/y level,welfare gains will be achieved.29
On the other side of the coin, however, are prospective bankruptcy costs fromasset-linked liability and the potentially greater incentives created by asset-linked liabil-ity for adoption of costly measures to limit corporate assets. If these costs are sufficientlylarge, they may offset the gains from asset-linked damage awards, thus favoring liabilitylimits that are decoupled from—and are below—the asset level. It is important to note,however, that below-asset liability bounds do not affect the logic of this paper’s analysis;under appropriate generalizations of Condition 1, a damage threshold rule that assessesmaximal liability in high-damage states and zero liability in low-damage states remainsoptimal.30
Entry and Exit
In this paper’s model, the optimal liability rule may prompt either fewer operating firmsor a greater number of operating firms than is efficient. A damage threshold ruleoptimally mitigates the “excessive entry” or “excessive entry-deterrence” problem byconfronting firms with expected accident penalties that are as close as possible to theexpected accident damages from their activities. For example, let us suppose that thehigher damage firms are also more profitable overall, with pt( ) positive and largerelative to firm type effects on both the probability of an accident, p( ), and expectedliability.31 When Condition 1 holds in this case, the optimal liability rule entails exces-sive damage assessments on low-damage firms that are also the marginal operators inthe accident-creating activity. As a result, there is less entry in the limited-liabilityconstrained optimum than in either a first-best or a “second-best” in which a semi-omnicient government tells which firms to operate but cannot direct care choices; inthis sense, too few firms operate. By minimizing the extent to which expected liabilityassessments exceed expected damages for low-damage firms, a damage threshold ruleminimizes this excessive entry deterrence.
Figure 5 illustrates these conclusions using three curves: (1) net expected firm profitsunder the constrained optimal legal rule 1*, J(t, 1*); (2) net expected firm profits in afirst-best, J(t, ls) (where ls denotes a strict liability rule, l(d) 5 d); and (3) net expectedsocial surplus from firm operation when firms choose their privately optimal care levelsunder the constrained optimal legal rule, J*(t, l*) 5 p(x(l*, t), t) 2 p(x(l*, t), t) E(d; t).To determine whether there are firms that do not operate even though their operationwould increase social welfare, we can compare the “second-best” set of operating firms—those for which J*(t, l*) is positive—with the set of firms that actually operate under the
29Arlen (1992) develops another argument for asset-linked liability, one driven by injurer risk aversion.30In fact, to the extent that modified liability limits tighten the upper bound on liability, they also increase the
likelihood that an appropriate analog to Condition 1 will hold and, hence, that damage threshold rules will be optimal.31Alternately, the low-damage firms will be more profitable if the firm type parameter t affects mainly the damage
distribution, with pt small or negative and pt small or positive [as in Shavell (1984), where pt 5 pt 5 0]. WhenCondition 1 holds in this case, the optimal liability rule entails insufficient liability assessments on marginal high t firms.As a result, there is excessive entry at the limited liability constrained optimum; that is, too many firms operate. Bymaximizing expected liability assessments for high t firms, a damage threshold rule minimizes the extent to whichexcessive entry occurs.
195INNES

constrained optimal legal rule—those for which J(t, l*) is positive. Because J(t, 1*)intersects the zero-profit axis to the right of both the first-best profit curve, J(t, ls), and thesecond-best surplus curve, J*(t, l*), the constrained optimum is characterized by fewerfirms—and more entry deterrence—than in either a first-best or a second-best world.32
Notably, the possibility of too few operating firms conforms with a public debate onentry/exit effects of liability rules that is often concerned with the likelihood of deterringtoo many “good” firms from operating [e.g., see Huber (1988)].33
Violation of Condition 1
Condition 1 requires moderately tight liability limits, which are arguably plausible inmany situations. In the context of the foregoing model, violation of this condition maypermit nonthreshold, non-care-contingent legal rules that reduce the divergence be-
32Three features of Figure 5 imply excessive entry deterrence: (1) When t is above (below) the optimal to level, to5 t*o, Condition 1 implies that first-best expected firm profits J(t, ls) are below (above) J(t, l*), the corresponding profitlevels under the optimal legal rule l*. (2) By revealed preference (i.e., optimality of the first-best x choice, when E(l;t) 5 E(d; t)), J*(t, l*) is everywhere below J(t, ls) except when t 5 to (where J*(t, l*) 5 J(t, ls)). Furthermore, whent is less than to (so that E(d; t) , E(l*; t) by Condition 1), J*(t, l*) is above J(t, l*) (since J*(t, l*) 2 J(t, l*) 5 p(x(l*,t), t) (E(l*; t) 2 E(d; t))). (3) The to firm that pays exactly its expected damages when an accident occurs is interiorto the set of firm types that operate in a constrained optimum. The reason is that a change in to from outside or onone of the bounds of this set into its interior increases efficiency for all firms in the interior by reducing the divergencebetween expected liability and expected damages for these firms. (This argument assumes that there is some minimalability to choose to. That is, it requires y . E(d; t*), where t* is the lowest t type that operates in a first-best. Withoutthis premise, assets would be less than expected accident damages for all relevant firms; as a result, the optimal liabilityrule would take the degenerate form, l(d) 5 y @ d, and entry would nonetheless remain under-deterred.) A completederivation of these conclusions is available in the expanded version of this paper.
33In contrast, standard care-contingent negligence rules—rules that confront an injurer with zero liability if arequisite standard of care is met and a large positive liability if this standard is not met—elicit excessive entry into anaccident-creating industry [Polinsky (1980); Shavell (1980)].
FIG. 5. Entry deterrence effects of optimal liability when higher damage firms are more profitable.
196 Optimal liability

tween expected liability and expected damage for some firms. For example, supposethat there are two injurer types, tH . tL, with Condition 1 violated. Then a nonthresholdlegal rule with less severe penalties in higher damage states can support first-bestoutcomes by confronting both firms with expected liabilities that equal their expecteddamages; one such rule (among many possibilities) is modified strict liability, l(d) 5 dfor all d ¶ d1 and l(d) 5 k [ (d1, y) for all d . d1, with d1 and k chosen to solve E(l(d)2 d; tL) 5 E(l(d) 2 d; tH) 5 0.
This observation, however, exagerates the importance of Condition 1 for the opti-mality of the damage threshold liability rule characterized in this paper. Generically, aDTL rule maximally punishes the most damaging injurers and minimally punishes theleast damaging injurers. This property of the threshold rule makes it useful in moreinvolved models of ex post liability assessment and litigation, even when Condition 1 isviolated. For example, consider a game between a government regulator and a set ofinjuring firms, wherein damage realizations can only be uncovered in a costly courtproceeding that can be avoided if an injuring firm agrees to pay a fine set by theregulator. The court-level liability rule and the fine should be designed to elicit the mostefficient precautionary behavior possible, although in doing so it minimizes the extentto which the costly court process is invoked. A DTL rule may achieve these ends byminimizing the incentive for high-damage firms to appeal to the court process, therebyenabling the court appeal process to serve as a screening mechanism with fewergovernment prosecutions of low-damage firm appeals and correspondingly lower ex-penditures on the legal process. Similar logic is likely to apply in suit, settlement, andtrial games [e.g., see Bebchuk (1984); Grossman and Katz (1983); and Png (1987)].Although these ideas merit further development, they suggest a rather general scope forDTL rules to increase economic efficiency.
Appendix: Proof of the DTL Rule’s Optimality
In this appendix, I present the rigorous analog to the five-step argument developed inSection III. In making the argument, it is necessary first to rule out degenerate cases inwhich (1) no firms operate and the issue of liability design is moot, and (2) the extremeDTL rule, l(d) 5 y for all d, is trivially optimal:
ASSUMPTION 1: T(l*) is of positive measure.
ASSUMPTION 2: y . E(d; t).Under Assumptions 1 and 2, the formal analogs to the results developed in Section
III are as follows:
LEMMA 1 (FIRST STEP): If l*(d) solves problem (4), then there is no l [ L such that: (I) forall t [ [t, t#], either (a) E(l*(d); t) ¶ E(l(d); t) , E(d; t), or (b) E(l*(d); t) Ä E(l(d); t)Ä E(d; t); and (II) for some t [ T(l*), the first inequality in (a) or (b) is strict.
LEMMA 2 (SECOND STEP): An optimal liability rule has the following property:
E~l*~d!; to! 5 E~d; to!, some to [ @t, t##. (A1)
LEMMA 3 (THIRD STEP): If an equation (5) negligence rule, lTo(d), and a feasible non-
negligence legal rule, lAo(d) : 0 ¶ lA
o(d) ¶ y, both satisfy condition (A1) for to [ [t, t#],E(lT
o(d); to) 5 E(lAo(d); to) 5 E(d; to), then:
197INNES

E~l To ~d!; t! , E~l A
o ~d!; t! ; t , to, and (A2a)
E~l To ~d!; t! . E~l A
o ~d!; t! ; t . to. (A2b)
Finally, given Condition (1)’s “weak” ((C1(a)) and “strong” ((C1)(b)) forms, asdescribed in note 22, we have:
LEMMA 4 (FOUTH AND FIFTH STEPS): If (C1)(a) holds, then the DTL rule lTo(d) (as defined in
Lemma 3) satisfies:
E~l To ~d!; t! , E~d; t! for t [ ~to, t##, (A3a)
E~l To ~d!; t! . E~d; t! for t [ @t, to!. (A3b)
If (C1)(b) holds, then lTo(d) satisfies equation (A3) for any possible to [ [t, t1].
LEMMA 5 (FIFTH STEP): (1) If the asset bound y is sufficiently small, then (C1)(b) will hold.(2) Suppose that some firms have assets that are insufficient to cover their expected damages,t1 5 max {t [ [t, t#] : y Ä E(d; t)} , t#. Then there exists a t*, with t* , t1 , t#, such that(C1)(a) holds for all to Ä t*. Hence, if there are sufficiently many firms with t Ä t* that theoptimal to is no lower than t*, then Lemma 4’s equation (A3) will hold at the optimal to.
If Lemma 4’s equation (A3) holds, then Lemma 3 implies that DTL rules minimizethe difference between expected liability and expected accident damage for all firms.Thus, by Lemma 1, an optimal legal rule must take the DTL form whenever Condition1 holds, whether in its “weak” or its “strong” form.
Proof of Lemma 1: Preliminaries
Define:
J~t, f, D! 5 p~ x 1~f, t!, t! 2 p~ x 1~f, t!, t! D,
where x 1(f, t) 5 argmax {p(x, t) 2 p(x, t)f} (5 x(l, t) for l 5 f). With expectedliability of f, social surplus from a firm’s operation is J(t, f, E(d; t)) and the corre-sponding firm benefit from operation is J(t, f, f). Further define the social surplusproduced by firm t with liability rule 1 as:
J*~t, l ! 5 J~t, E~l; t!, E~d; t!!.
Some useful properties of J( ) are:
(P1) ]J(t, f, D)/]D 5 2p( ) , 0 (higher damages lead to lower surplus)
(P2)d
df~ J~t, f, f!! 5 2p~ ! , 0 (firm benefits fall when liability is raised)
(P3) ]J(t, f, D)/]f 5 2px( )[f 2 D]x f1(f, t) x 0 when f c D (surplus rises when
liability approaches damage)
(P1) follows from the envelope theorem (and the definition of x 1(f, t)). (P2) followsfrom simple differentiation. To establish (P3), differentiate J( ), substitute from thefirst-order condition for x 1(f, t) and note that x f
1(f, t) 5 px( )/[pxx( ) 2 pxx ( )f] .0.
PROOF: The Lemma states that if there is an l [ L satisfying conditions (I) and (II),then total social surplus is higher with l than with l*, contradicting the optimality of l*:
198 Optimal liability

ET~l!
J*~t, l ! q~t! dt . ET~l*!
J*~t, l*! q~t! dt. (A4)
Now suppose that the following conditions hold:
(A) l does not reduce social surplus: For all t [ T(l*), J*(t, l) Ä J*(t, l*), with strictinequality for some t9 [ T(l*).
(B) l does not subtract positive benefit firms: If t [ T(l*) and J*(t, l*) Ä 0, then t [ T(1).(C) l does not add negative benefit firms: If t ¸ T(l*) and J*(t, l) , 0, then t ¸ T(l).
Conditions (A) to (C) directly imply that l achieves at least the same social surplus asdoes l*. If t9 [ T(l) (for t9 as defined in A), then l strictly raises social surplus for a t9firm that continues to operate. And if t9 ¸ T(l), then by condition (B), the t9 firmgenerates negative surplus under l*, J*(t9, l*) , 0; hence, the exclusion of t9 under 1raises surplus. (A4) will thus follow if conditions (A) to (C) can be shown to hold underconditions (I) and (II) in the lemma.
CONDITION (A): Condition (I) and property (P3) imply condition (A).
CONDITION (B): Suppose the contrary, t ¸ T(1). Then, because t ¸ T(l*), firm tbenefits must be higher under liability rule l*:
J~t, f1, f1! , J~t, f1*, f1*!, (A5a)
where fl 5 E(l; t) and fl* 5 E(l*; t).By property (P1), (A5a) implies that f1 . fl* and hence, by condition (I), f1 ¶ E(d;
t). Together with (P3), these inequalities imply:
J~t, f1, E~d; t!! . J~t, f1*, E~d; t!! 5 J*~t, l*! > 0, (A5b)
with the last inequality holding by hypothesis. Finally, with fl ¶ E(d; t), property (P2)implies
J~t, f1, E~d; t!! < J~t, f1, f1!. (A5c)
Together, (A5b) and (A5c) contradict the initial supposition, t ¸ T(l) (because J(t, f1,f1) , 0) and thus establish condition (B).
CONDITION (C): Suppose the contrary, t [ T(1) because J(t, f1, f1) Ä 0. By hypothesis,we have J*(t, l) 5 J(t, f1, E(d; t)) , 0. Together with (P2), these two inequalities implythat f1 , E(d; t), and hence (by condition (I)), f1 Ä f1*. By (P1), we thus have
J~t, f1, f1! < J~t, f1*, f1*! , 0,
where the second inequality follows from the premise that t ¸ T(l*). This inequalitycontradicts the initial supposition that t [ T(1), and thus establishes condition (C).QED.
Proof of Lemma 2
First note that, by Assumption 2, there is a feasible legal rule such that (A1) holds. Nextnote that E(l(d) 2 d; t), is continuous in t (by piecewise continuity of l(d) anddifferentiability of h(d; t)). Thus, by the intermediate value theorem, if (A1) is violated,
199INNES

either (1) E(l(d) 2 d; t) . 0 @ t or (2) E(l(d) 2 d; t) , 0 @ t. Suppose first that E(l(d)2 d; t) . 0 @ t. In this case, one can replace l(d) with (1 2 e)l(d) (with e positive andarbitrarily small), thus reducing the difference between expected liability and expecteddamages, E(l(d); t) 2 E(d; t), for all t; hence, by Lemma 1 and Assumption 1, l(d)cannot be optimal. Conversely, suppose that E(l(d) 2 d; t) , 0 @ t. In this case,Assumption 2 implies that l(d) , y on some nondegenerate subset of the support ford, D. Thus, one can replace l(d) with
lA~d! 5l~d! for d [ Dc
l~d!~1 1 e! for d [ D,
where Dc is the complement of D on [d, d#]. This change will reduce the absolute valueof the difference between expected liability and damages, for all t, again contradictingoptimality of l(d). QED.
Proof of Lemma 3
Consider the following claim:
CLAIM: ]E(lAo(d); t)/]t , ]E(lT(d; do); t)/]t whenever E(lA
o(d); t) 5 E(lT(d; do); t).
PROOF: Given the liability bounds, 0 ¶ l(d) ¶ y, and the definition of negligence, thefollowing inequalities hold:
1Ao ~d! > lT~d; do! ; d < do, (A6a)
1Ao ~d! < lT~d; do! ; d . do, (A6b)
with both inequalities strict on sets of positive measure (recall Figure 2). Now, followingInnes (1990), define
f~d! 5 l Ao ~d! 2 lT~d; do! H > 0 ; d < do
< 0 ; d . do
, (A7)
and note that, by construction (i.e., E(lAo(d); t) 5 E(lT(d; do); t)),
Ed
do
f~d! h~d; t! dd 1 Edo
d
f~d! h~d; t! dd 5 0. (A8)
The claim will follow if the derivative,
]E~f~d!; t!/]t 5 Ed
d
f~d! ht~d; t! dd, (A9)
is negative. To evaluate this derivative, define
d~dL! 5f~dL!h~dL; t!
Ed
do
f~d! h~d; t! dd
5f~dL!h~dL; t!
2 Edo
d
f~d! h~d; t! dd
for dL [ @d, do!, (A10)
where the second equality follows from (A8). By construction, *ddo d(dL) ddL 5 1. Using
this fact and substituting for d(dL) from (A10), (A9) can be rewritten as
200 Optimal liability

Ed
d
f~d! ht~d; t! dd 5 Ed
do
d~dL!ht~dL; t!
h~dL; t!@2 E
do
d
f~d! h~dH; t! ddH# ddL
1 Edo
d#
f~dH! ht~dH; t! ddH Ed
do
d~dL! ddL,
5Ed
do Edo
d#
d~dL!f~dH! h~dH; t! Hht~dH; t!
h~dH; t!2
ht~dL; t!
h~dL; t!JddH ddL , 0, (A11)
where dH denotes the variable of integration over the interval [do, d#] and dL denotes thevariable of integration over [d, do]. The inequality in (A11) follows from d(dL) Ä 0 @ dL
, do (with strict inequality on a set of positive measure in the interval, [d, do]), f(dH) ¶0 @ dH . do (with strict inequality on a set of positive measure in the interval [d0, d#]),and the MLRP equation (1) (since dH . dL). The claim now follows from (A11) and thedefinition of f(d). QED Claim.
By the above claim,
' N~to!: E~l To ~d!; t! . E~l A
o ~d!; t! ; t:t . to and t [ N~to!, (A12)
where N(t) is a neighborhood of t. Now suppose that (A2b) is violated for some t . toand let t1 be the minimum t such that t . to and (A2b) is violated. By continuity ofE(l T
o (d) 2 l Ao (d); t) in t, condition (A12), and the definition of t1, we have: (1) the
interval (to, t1) is nondegenerate, (2) E(l To (d); t1) 5 E(l A
o (d); t1), and (3)
E~l To ~d!; t! . E~l A
o ~d!; t! ; t [ ~to, t1!. (A13)
But, with E(l To (d); t1) 5 E(l A
o (d); t1), the above claim implies that
' N~t1!: E~l To ~d!; t! , E~l A
o ~d!; t! ; t:t , t1 and t [ N~t1!. (A14)
Because equation (A14) contradicts equation (A13), condition (A2b) must hold. Sym-metric logic applies to inequality (A2a). QED.
Proof of Lemma 4
Consider an arbitrary to [ [t, t 1], noting that E(l To (d) 2 d; t) is continuously differ-
entiable in t. By Condition 1, ]E(l To (d) 2 d; t)/]t ¶ 0 at t 5 to. Now suppose that (A3a)
is violated—and hence, E[l To (d) 2 d; t] rises above zero for some t . to. Then there must
be a t [ (to, t 1] such that E(l To (d) 2 d; t) 5 0 (which requires t ¶ t 1) and ]E(l T
o (d)2 d; t)/]t . 0. However, these last two relations contradict Condition 1. Inequality(A3b) follows from a symmetric contradiction. QED.
Proof of Proposition 1
Suppose the contrary, that there is an alternative liability rule that solves problem (4),l*(d) 5 l A
o (d). By Lemma 2, there is a to [ [t, t#] such that E(l Ao (d); to) 5 E(d; to). Now
consider the DTL analog to l Ao (d) (as defined in Lemma 3), namely, l(d) 5 l T
o (d):E(l T
o (d); to) 5 E(l Ao (d); to). Given Assumption 1 and Condition 1, Lemmas 3 and 4 imply
that, with l*(d) 5 l Ao (d) and l(d) 5 l T
o (d), conditions (I) and (II) of Lemma 1 aresatisfied, and, hence, l A
o (d) cannot solve problem (4). QED.
201INNES

Proof of Lemma 5
1. Differentiating do(t, y) (as defined in note 22) gives:
]do~t, y!/]t 5 @]E~d; t!/]t 1 yHt~do; t!#/~2yh~do; t!!. (A15)
By the MLRP [equation (1)], there is, for each t, a critical d*(t) such that ht(d; t) , 0for all d , d*(t) and ht(d; t) . 0 for all d . d*(t). If
y < 2@]E~d; t!/]t#/Ht~d*~t!; t!, (A16)
then ]do(t, y)/]t in (A15) will be nonpositive and strictly negative if either do Þ d*(t)or the inequality in (A16) is strict. Therefore, if y satisfies (A16) for all t [ [t, t1], sothat
y < mint[@t, t 1# $2@]E~d; t!/]t#/Ht~d*~t!; t!%,
then (C1)(b) will hold.
2. With y , E(d; t#) and y . E(d; t) (by Assumption 2), there is a t 1 [ (t, t#): E(d; t 1)5 y and, hence, do(t 1, y) 5 d. Now, for a given do, define:
Q~do, t, y! 5 ]E~d 2 lT~d; do!; t!/]t 5 ]E~d; t!/]t 1 yHt~do; t!. (A17)
For (C1)(a) to hold, it suffices to show that Q( ) is non-negative for all t at do 5 do(to, y).If to 5 t1 and, hence, do 5 d, then Ht(do; t) 5 0 and Q( ) . 0 for all t. Therefore, thereexists a d1(y) 5 max d [ (d, d#]: Q( ) Ä 0 for all do ¶ d1(y) and all t. We can thus define
t* 5 mint [ @t, t 1!: do~ z, y! < d 1~ y! ; z > t.
Noting that d 1(y) . d 5 do(t 1, y) (because Q(d, t 1, y) . 0), we have that t* , t 1 and,by construction, Q( ) Ä 0 @t at do 5 do(to, y) for any to Ä t*. QED.
References
ABRAHAM, K., AND J. JEFFRIES. (1989). “Punitive Damages and the Rule of Law: The Role of Defendant’sWealth.” Journal of Legal Studies 18:415–425.
ANDERSON, M. (1996). “The State Voluntary Cleanup Program Alternative.” Natural Resources and Envi-ronmental Law Winter:22–26.
Arizona Department of Environmental Quality (ADEQ). (1996). Arizona Environmental Compliance Update.ARLEN, J. (1992). “Should Defendants’ Wealth Matter?” Journal of Legal Studies 21:413–429.BEARD, R. (1990). “Bankruptcy and Care Choice.” Rand Journal of Economics 21:626–634.BEBCHUK, L. (1984). “Litigation and Settlement Under Imperfect Information.” Rand Journal of Economics
15:404–415.BOYD, J., AND D. INGBERMAN. (1992). “Insolvency, Product and Environmental Risk, and Rule Choice.”
Working paper, Resources for the Future.BROWN, J. (1973). “Toward an Economic Theory of Liability.” Journal of Legal Studies 2:323–350.CALFEE, J., AND R. CRASWELL. (1984). “Some Effects of Uncertainty on Compliance with Legal Standards.”
Virginia Law Review 70:965–1003.CORY, D. (1997). “Potentially Polluting Activities and the Control of Environmental Risk: The Arizona
Approach to Aquifer Protection.” Initiative 8:115–119.CRASWELL, R., AND J. CALFEE. (1986). “Deterrence and Uncertain Legal Standards.” Journal of Law,
Economics and Organization 2:279–303.DIAMOND, P. (1974). “Single Activity Accidents.” Journal of Legal Studies 3:107–64.EDLIN, A. (1994). “Efficient Standards of Due Care: Should Courts Find More Parties Negligent Under
Comparative Negligence?” International Review of Law and Economics 14:21–34.
202 Optimal liability

GREEN, J. (1974). “On the Optimal Structure of Liability Laws.” Bell Journal of Economics 7:553–574.GRIGALUNAS, T., AND J. OPALUCH. (1988). “Assessing Liability for Damages under CERCLA.” Natural
Resources Journal 28:509–534.GROSSMAN, G., AND M. KATZ. (1983). “Plea Bargaining and Social Welfare.” American Economic Review 73:
749–757.HUBER, P. (1988). Liability: The Legal Revolution and Its Consequences. New York: Basic Books.INNES, R. (1990). “Limited Liability and Incentive Contracting with Ex-Ante Action Choices.” Journal of
Economic Theory 52:45–67.KOLSTAD, C., T. ULEN, AND G. JOHNSON. (1990). “Ex Post Liability for Harm vs. Ex Ante Safety Regulation:
Substitutes or Complements?” American Economic Review 80:888–901.LANDES, W., AND R. POSNER. (1987). The Economic Structure of Tort Law. Cambridge, MA: Harvard
University Press.MILGROM, P. (1981). “Good News and Bad News: Representation Theorems and Applications.” Bell
Journal of Economics 13:369–378.PNG, I. (1987). “Litigation, Liability and Incentives for Care.” Journal of Public Economics 34:61–85.POLINSKY, A. M. (1991). “Strict Liability vs. Negligence in a Market Setting.” American Economic Review 70:
363–367.POLINSKY, A. M., AND Y. CHE. (1991). “Decoupling Liability: Optimal Incentives for Care and Litigation.”
Rand Journal of Economics 22:562–570.POLINSKY, A. M., AND D. RUBINFELD. (1988). “The Welfare Implications of Costly Litigation for the Level
of Liability.” Journal of Legal Studies 17:151–164.POLINSKY, A. M., AND D. RUBINFELD. (1996). “Optimal Awards and Penalties When the Probability of
Prevailing Varies Among Plaintiffs.” Rand Journal of Economics 27:269–280.RANDALL, A. (1993). “Passive Use Values and Contingent Valuation: Valid for Damage Assessment.”
Choices 12–15.RASMUSEN, E. (1995). “How Optimal Penalties Change with the Amount of Harm.” International Review
of Law and Economics 15:101–108.RINGLEB, A., AND S. WIGGINS. (1990). “Liability and Large-Scale, Long-Term Hazards.” Journal of Political
Economy 98:574–595.ROSE-ACKERMAN, S. (1991). “Regulation and the Law of Torts.” American Economic Review 81:54–58.RUBINFELD, D. (1987). “The Efficiency of Comparative Negligence.” Journal of Legal Studies 16:375–394.SCHWARTZ, A. (1985). “Products Liability, Corporate Structure, and Bankruptcy: Toxic Substances and
the Remote Risk Relationship.” Journal of Legal Studies 14:689–736.SHAVELL, S. (1980). “Strict Liability Versus Negligence.” Journal of Legal Studies 9:1–25.SHAVELL, S. (1984). “A Model of the Optimal Use of Liability and Safety Regulation.” Rand Journal of
Economics 15:271–280.SHAVELL, S. (1986). “The Judgement Proof Problem.” International Review of Law and Economics 6:45–58.SHAVELL, S. (1987). Economic Analysis of Accident Law. Cambridge, MA: Harvard University Press.SPIER, K. (1994). “Settlement Bargaining and the Design of Damage Awards.” Journal of Law, Economics
and Organization 10:84–95.SUMMERS, J. (1983). “The Case of the Disappearing Defendant: An Economic Analysis.” University of
Pennsylvania Law Review 132:145–175.SUNDING, D., D. ZILBERMAN. (1996). “Allocating Product Liability in a Multi-Market Setting.” Working
Paper, University of California, Berkeley.VISCUSI, W. K. (1987). “Toward a Diminished Role for Tort Liability: Social Insurance, Government
Regulation, and Contemporary Risks to Health and Safety.” Yale Journal on Regulation 6:65–107.VON OPPENFELD, R. (1996). “Environmental Audits and Litigation: Use and Abuse.” Paper Presented at
Environmental Audit Seminar, Phoenix, Arizona, February 23, 1996.WHITE, M., AND D. WITTMAN. (1983). “A Comparison of Taxes, Regulation, and Liability Rules Under
Imperfect Information.” Journal of Legal Studies 12:413–425.WHITT, W. (1980). “Uniform Conditional Stochastic Order.” Journal of Applied Probability 17:112–123.WITTMAN, D. (1977). “Prior Regulation versus Post Liability: The Choice between Input and Output
Monitoring.” Journal of Legal Studies 6:193–212.
203INNES










![Lesson 91 Muslims Suffering Harms. [21] Quraysh harms the Prophet, peace be upon him](https://img.pdfslide.us/doc/110x75/56649cd05503460f9499c232/lesson-91-muslims-suffering-harms-21-quraysh-harms-the-prophet-peace-be.jpg)

![Don Harms V1[1]](https://img.pdfslide.us/doc/110x75/54b4bd0b4a79592a668b45b5/don-harms-v11.jpg)