Embed Size (px)
Citation preview

DFS, Langen
23.04.2013 1
FRENCH-GERMAN RESEARCH INSTITUTE OF SAINT-LOUIS
© ISL 2010– All rights reserved conform to ISO 16016
ww
w.i
sl.eu
Leif Walter Institute of
Flight System Dynamics
Optimal Control in Air Traffic Management
DGLR Workshop
“Bestimmung optimaler Trajektorien im Air Traffic Management”
23.04.2013
Deutsche Flugsicherung GmbH, Langen

DFS, Langen
23.04.2013 2
FRENCH-GERMAN RESEARCH INSTITUTE OF SAINT-LOUIS
© ISL 2010– All rights reserved conform to ISO 16016
ww
w.i
sl.eu
Leif Walter Institute of
Flight System Dynamics
. Hintergrund und Motivation
. Optimalsteuerung
. Initiale Resultate und Roadmap
Inhalt

DFS, Langen
23.04.2013 3
FRENCH-GERMAN RESEARCH INSTITUTE OF SAINT-LOUIS
© ISL 2010– All rights reserved conform to ISO 16016
ww
w.i
sl.eu
Leif Walter Institute of
Flight System Dynamics
Hintergrund und Motivation

DFS, Langen
23.04.2013 4
FRENCH-GERMAN RESEARCH INSTITUTE OF SAINT-LOUIS
© ISL 2010– All rights reserved conform to ISO 16016
ww
w.i
sl.eu
Leif Walter Institute of
Flight System Dynamics
Hintergrund und Motivation
• Lösung des Space Shuttle Reentry Problems mit Methoden der Optimalsteuerung
• Optimierung in ATM:
– Wegpunkt-Optimierung und Approximation der Trajektorien durch B-Splines
– Multi-Agent Optimierung
– Lineare Optimierung zur Wegpunkt-Generierung
– ...

DFS, Langen
23.04.2013 5
FRENCH-GERMAN RESEARCH INSTITUTE OF SAINT-LOUIS
© ISL 2010– All rights reserved conform to ISO 16016
ww
w.i
sl.eu
Leif Walter Institute of
Flight System Dynamics
Hintergrund und Perspektive
• Perspektive der Optimalsteuerung
– Betrachtung des Flugverkehrs aus einer Gesamtansicht
– Automatische und optimale Steuerung aller beteiligten Flugzeuge unter Einhaltung von Pfadbeschränkungen
Verkehrssituation
Generierung eines Optimal
Control Problems
Ground-System Optimierung
Ground-to-air
Data Comm
FMS/Pilot Realisierung
Steuere alle Flugzeuge simultan

DFS, Langen
23.04.2013 6
FRENCH-GERMAN RESEARCH INSTITUTE OF SAINT-LOUIS
© ISL 2010– All rights reserved conform to ISO 16016
ww
w.i
sl.eu
Leif Walter Institute of
Flight System Dynamics
Optimalsteuerung

DFS, Langen
23.04.2013 7
FRENCH-GERMAN RESEARCH INSTITUTE OF SAINT-LOUIS
© ISL 2010– All rights reserved conform to ISO 16016
ww
w.i
sl.eu
Leif Walter Institute of
Flight System Dynamics
Optimalsteuerung
• Finde einen optimalen Steuerungsverlauf u(t), der einen dynamischen Prozess dx/dt = f(t,x,u) von seinem Anfangszustand x0, zu seinem Endzustand xf, auf optimaler Weise führt.
• Der Prozess sei dabei Gegenstand von Pfadbeschränkungen auf Zustandsvariablen x(t) und Steuergrößen u(t).
US Navy, SM-3 Interceptor Soyuz Spacecraft
Nissan Skyline GT-R34
DFS, Langen
23.04.2013 8
FRENCH-GERMAN RESEARCH INSTITUTE OF SAINT-LOUIS
© ISL 2010– All rights reserved conform to ISO 16016
ww
w.i
sl.eu
Leif Walter Institute of
Flight System Dynamics
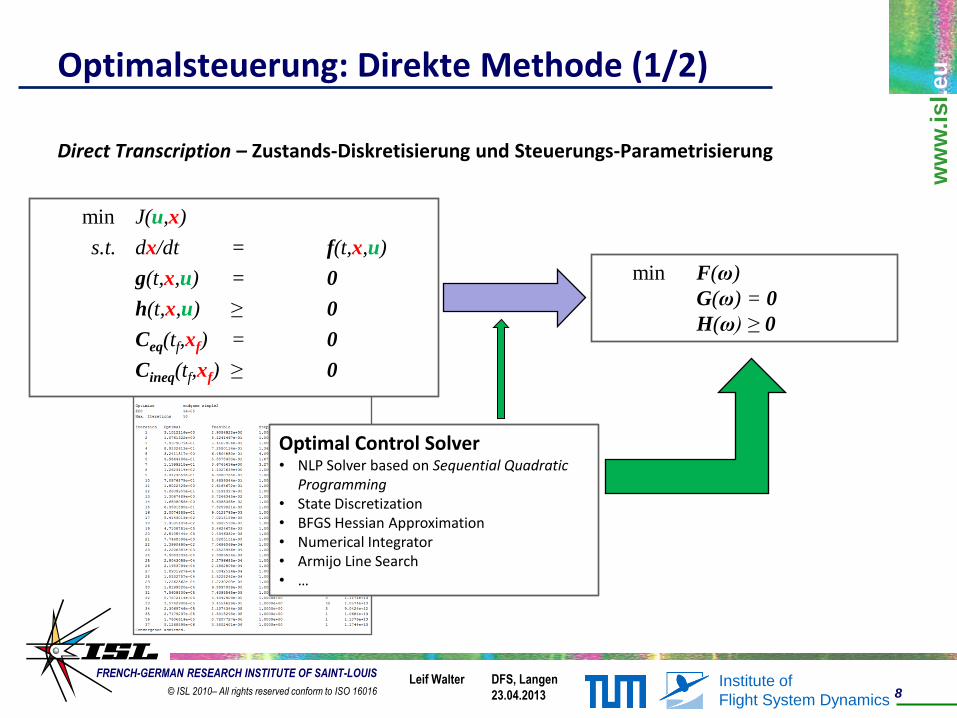
Direct Transcription – Zustands-Diskretisierung und Steuerungs-Parametrisierung
Optimalsteuerung: Direkte Methode (1/2)
min J(u,x)
s.t. dx/dt = f(t,x,u)
g(t,x,u) = 0
h(t,x,u) ≥ 0
Ceq(tf,xf) = 0
Cineq(tf,xf) ≥ 0
min F(ω)
G(ω) = 0
H(ω) ≥ 0
Optimal Control Solver • NLP Solver based on Sequential Quadratic
Programming • State Discretization • BFGS Hessian Approximation • Numerical Integrator • Armijo Line Search • …

DFS, Langen
23.04.2013 9
FRENCH-GERMAN RESEARCH INSTITUTE OF SAINT-LOUIS
© ISL 2010– All rights reserved conform to ISO 16016
ww
w.i
sl.eu
Leif Walter Institute of
Flight System Dynamics
Optimalsteuerung: Direkte Methode (2/2)
• Schritt 1: Transkription
– Zustandsdiskretisierung
– Parametrisierung der Steuergrößen
• Schritt 2: Lösen des NLP
– Iterativer Abstiegsalgorithmus
• ωk+1 = ωk + αkdk
• Erhalte Suchrichtung dk aus Lösung eines quadratischen Hilfsproblems
• Bestimme Schrittweite αk durch Armijo-Bedingung o.ä.
• Für jede Iteration – Überprüfe
– Nebenbedingungen
– Endpunkt-Bedingungen
– Zielfunktion
• Schritt 3: Re-Transkription der Lösung
– Erhalte finale Trajektorien aus Lösung

DFS, Langen
23.04.2013 10
FRENCH-GERMAN RESEARCH INSTITUTE OF SAINT-LOUIS
© ISL 2010– All rights reserved conform to ISO 16016
ww
w.i
sl.eu
Leif Walter Institute of
Flight System Dynamics
All-at-once Perspektive: Multiple Shooting
• Beispiel: Lotka-Voltera Räuber-Beute-Dynamik
• Simuliere Prozess und optimiere Steuerungen parallel
– Identifiziere Multiple Shooting Stützstellen si [Simulation]
– Identifiziere Steuerungen u(t) und Parameter p [Optimierung]
2 Zustände, 4 Parameter, 1 Steuerungsfunktion – 20 Variablen, ω=(s,p,u)T
2.6 s

DFS, Langen
23.04.2013 11
FRENCH-GERMAN RESEARCH INSTITUTE OF SAINT-LOUIS
© ISL 2010– All rights reserved conform to ISO 16016
ww
w.i
sl.eu
Leif Walter Institute of
Flight System Dynamics
minp ½pTHkp + (δFk/δx)Tp + Fk
(δG/δx)Tp + Gk = 0
(δH/δx)Tp + Hk ≥ 0
minp ½pTHkp + (δFk/δx)Tp + Fk
(δG/δx)Tp + Gk = 0
(δH/δx)Tp + Hk ≥ 0
Nichtlineare Optimierung (1/2)
• Aufgabe: Löse nichtlineares Optimierungsproblem für Vektor ω
• Lagrange-Ansatz
– δL/δx = δF/δx – (δG/δx)Tλ – (δH/δx)Tμ = 0
– Erhalte Suchrichtung dk aus quadratischem Hilfsproblem
• Taylorentwicklung von L
• Linearisierung der Nebenbedingungen
min F(ω)
G(ω) = 0
H(ω) ≥ 0

DFS, Langen
23.04.2013 12
FRENCH-GERMAN RESEARCH INSTITUTE OF SAINT-LOUIS
© ISL 2010– All rights reserved conform to ISO 16016
ww
w.i
sl.eu
Leif Walter Institute of
Flight System Dynamics
Nichtlineare Optimierung (2/2)
• Gradienten-Matrix bzw. Hesse-Matrix enttscheidend für die Performance des Algorithmus
– Ausnutzen der Struktur („Kondensierung“)
– Verwendung effizienter Update Verfahren zur Erzeugung der Hesse-Matrix (BFGS ...)
– Geschickte Problemskalierung
• Idealfall: Hessematrix nahe Identität in optimalem Punkt

DFS, Langen
23.04.2013 13
FRENCH-GERMAN RESEARCH INSTITUTE OF SAINT-LOUIS
© ISL 2010– All rights reserved conform to ISO 16016
ww
w.i
sl.eu
Leif Walter Institute of
Flight System Dynamics
Optimalsteuerung: Zusammenfassung
• Optimalsteuerung im Bereich ATM bedeuted nicht
– Entscheidungsbäume
– Instrinsische Lösungsheuristik
– Verschiedene Lösungen untersuchen
• Stattdessen ↔ F‘(x) = 0
– Übersetzung des Problems in ein mathematisches Optimierungsproblem
– Übersetzung der mathematischen Lösung in eine realisierbare und kommunizierbare Situationslösung

DFS, Langen
23.04.2013 14
FRENCH-GERMAN RESEARCH INSTITUTE OF SAINT-LOUIS
© ISL 2010– All rights reserved conform to ISO 16016
ww
w.i
sl.eu
Leif Walter Institute of
Flight System Dynamics
Initiale Resultate und Roadmap

DFS, Langen
23.04.2013 15
FRENCH-GERMAN RESEARCH INSTITUTE OF SAINT-LOUIS
© ISL 2010– All rights reserved conform to ISO 16016
ww
w.i
sl.eu
Leif Walter Institute of
Flight System Dynamics
Convergence achieved – Hmm...
• Erstes Resultat – August 2011

DFS, Langen
23.04.2013 16
FRENCH-GERMAN RESEARCH INSTITUTE OF SAINT-LOUIS
© ISL 2010– All rights reserved conform to ISO 16016
ww
w.i
sl.eu
Leif Walter Institute of
Flight System Dynamics
Lessons Learned
• Abbildung des Optimalsteuerungsproblems muss zu adäquaten Lösungen führen
– Zielfunktion
– Nebenbedingungen
– Dynamisches System
• Algorithmische Details
– Lokale Minima vermeiden
– Wahl der Hesse-Matrix Approximation

DFS, Langen
23.04.2013 17
FRENCH-GERMAN RESEARCH INSTITUTE OF SAINT-LOUIS
© ISL 2010– All rights reserved conform to ISO 16016
ww
w.i
sl.eu
Leif Walter Institute of
Flight System Dynamics
Beispielszenario (1/2)
• Lösung eines menschlichen Lotsen

DFS, Langen
23.04.2013 18
FRENCH-GERMAN RESEARCH INSTITUTE OF SAINT-LOUIS
© ISL 2010– All rights reserved conform to ISO 16016
ww
w.i
sl.eu
Leif Walter Institute of
Flight System Dynamics
Beispielszenario (2/2)
• Lösung des Algorithmus, MinSep 7.5 NM
Flugzeuge von links nach rechts

DFS, Langen
23.04.2013 19
FRENCH-GERMAN RESEARCH INSTITUTE OF SAINT-LOUIS
© ISL 2010– All rights reserved conform to ISO 16016
ww
w.i
sl.eu
Leif Walter Institute of
Flight System Dynamics
Ergebnisse (1/3)

DFS, Langen
23.04.2013 20
FRENCH-GERMAN RESEARCH INSTITUTE OF SAINT-LOUIS
© ISL 2010– All rights reserved conform to ISO 16016
ww
w.i
sl.eu
Leif Walter Institute of
Flight System Dynamics
Ergebnisse (2/3)

DFS, Langen
23.04.2013 21
FRENCH-GERMAN RESEARCH INSTITUTE OF SAINT-LOUIS
© ISL 2010– All rights reserved conform to ISO 16016
ww
w.i
sl.eu
Leif Walter Institute of
Flight System Dynamics
Ergebnisse (3/3)

DFS, Langen
23.04.2013 22
FRENCH-GERMAN RESEARCH INSTITUTE OF SAINT-LOUIS
© ISL 2010– All rights reserved conform to ISO 16016
ww
w.i
sl.eu
Leif Walter Institute of
Flight System Dynamics
Roadmap
• Initiale Fragestellungen (Anfang 2012)
– Welche Schwierigkeiten ergeben sich aus einer multikriteriellen Zielfunktion?
– Wie kann man adäquate Anfangswerte für die Optimierung generieren?
– Generierung von kommunizierbaren Lösungen
– Betrachtung von kontinuierlichen Szenarien mit „vielen“ Flugzeugen
– Closed-Loop Algorithmen zur Kompensierung von Fehlern und Ungenaugkeiten
• Ausblick (April 2013)
– Erweiterung der Modellierung auf 3D Szenarien
– Interface zum AFS Simulator
– Implementierung von Wind- und Wettereffekten

DFS, Langen
23.04.2013 23
FRENCH-GERMAN RESEARCH INSTITUTE OF SAINT-LOUIS
© ISL 2010– All rights reserved conform to ISO 16016
ww
w.i
sl.eu
Leif Walter Institute of
Flight System Dynamics
Q & A
Vielen Dank für die Aufmerksamkeit!
Fragen & Antworten





![Einheitenzertifikat - Fronius International/downloads/Solar Energy... · Referenz Prüfberichte [6] Bestimmung der elektrischen Eigenschaften des PV Wechselrichters "Fronius Symo](https://img.pdfslide.us/doc/110x75/5f29b0730c8a21074d3503e7/einheitenzertifikat-fronius-international-downloadssolar-energy-referenz.jpg)






![Implementierung einer LC-ICP-MS Methode zur Bestimmung von ... · Microsoft PowerPoint - Intertek_Arsenspeziation_CI_rev..ppt [Kompatibilitätsmodus] Author: Administrator Created](https://img.pdfslide.us/doc/110x75/5e068947f257367ed979ee46/implementierung-einer-lc-icp-ms-methode-zur-bestimmung-von-microsoft-powerpoint.jpg)














