Embed Size (px)
Citation preview

Lavrik and Datskos Microsystems & Nanoengineering (2019) 5:47 Microsystems & Nanoengineeringhttps://doi.org/10.1038/s41378-019-0087-9 www.nature.com/micronano
ART ICLE Open Ac ce s s
Optically read Coriolis vibratory gyroscope basedon a silicon tuning forkN. V. Lavrik 1 and P. G. Datskos 2
AbstractIn this work, we describe the design, fabrication, and characterization of purely mechanical miniature resonatingstructures that exhibit gyroscopic performance comparable to that of more complex microelectromechanical systems.Compared to previous implementations of Coriolis vibratory gyroscopes, the present approach has the key advantageof using excitation and probing that do not require any on-chip electronics or electrical contacts near the resonatingstructure. More specifically, our design relies on differential optical readout, each channel of which is similar to the“optical lever” readout used in atomic force microscopy. The piezoelectrically actuated stage provides highly efficientexcitation of millimeter-scale tuning fork structures that were fabricated using widely available high-throughput wafer-level silicon processing. In our experiments, reproducible responses to rotational rates as low as 1.8 × 103° h−1 weredemonstrated using a benchtop prototype without any additional processing of the raw signal. The noise-equivalentrate, ΩNER, derived from the Allan deviation plot, was found to be <0.5° h−1 for a time of 103 s. Despite the relativelylow Q factors (<104) of the tuning fork structures operating under ambient pressure and temperature conditions, themeasured performance was not limited by thermomechanical noise. In fact, the performance demonstrated in thisproof-of-principle study is approximately four orders of magnitude away from the fundamental limit.
IntroductionOver the past two decades, micromechanical inertial
sensing devices, such as accelerometers and gyroscopes,have been the subjects of extensive research1–3. Althoughaccelerometers and gyroscopes based on microelec-tromechanical systems (MEMS) have already beenimplemented in many commercial devices, there is stillboth fundamental and industrial interest in continuedresearch efforts in this area. This interest is stimulatedprimarily by the need for miniature inertial sensingdevices with figures of merit orders of magnitude betterthan those of the existing state-of-the-art. Miniaturizinggyroscopes using innovative designs and microfabricationprocesses is an attractive solution to inertial sensing thatopens up new market opportunities2. Further advances in
this area are beneficial for not only navigation applicationsbut also fundamental geophysical studies and even tests ofgeneral relativity theory and laws of gravity and inertia.Micromachined accelerometers and gyroscopes are
some of the most important types of silicon-based devicessuccessfully commercialized after the establishment ofcomplementary metal oxide-semiconductor technology1.Since the first demonstration of a micromachined gyro-scope4, similar devices have been implemented usingsurface, bulk, and hybrid surface-bulk micromachiningapproaches. Although numerous gyroscope designs basedon a variety of physical principles have been described, themajority of MEMS gyroscopes are based on vibratingmechanical elements that successfully utilize the effect ofthe Coriolis force. These devices, known as Coriolisvibratory gyroscopes (CVGs), are based on the transfer ofenergy between two vibration modes of a structure causedby Coriolis acceleration5. When rotated, a vibrating ele-ment is subjected to a sinusoidal Coriolis force that causessecondary vibration orthogonal to the original vibrating
© The Author(s) 2019OpenAccessThis article is licensedunder aCreativeCommonsAttribution 4.0 International License,whichpermits use, sharing, adaptation, distribution and reproductionin any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if
changesweremade. The images or other third partymaterial in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to thematerial. Ifmaterial is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtainpermission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
Correspondence: P G. Datskos ([email protected])1Center for Nanophase Materials Sciences, Oak Ridge National Laboratory, OakRidge, TN 37931-6054, USA2Mechanical and Thermal Engineering Sciences, National Renewable EnergyLaboratory, Golden, CO 80401, USA
1234
5678
90():,;
1234
5678
90():,;
1234567890():,;
1234
5678
90():,;

direction. By sensing the secondary vibration, the rate ofrotation can be detected6. Interestingly, a similar principleis used by nature in certain insects that have vibratingdumbbell-shaped organs, known as halteres, to aid theirflight7,8.A number of MEMS-based gyroscopic devices suitable
for less demanding applications are now commerciallyavailable9. However, low-cost and high-performancedevices are not yet available. Current state-of-the-artmicromechanical CVGs require a few orders of magni-tude improvement in stability to be useful for navigationapplications without assistance from the Global Posi-tioning System. It is important to emphasize that therelatively poor performance of existing MEMS gyroscopesis often limited by the multiple sources of readout noiseand drifts present in practical devices10. Although themore sophisticated MEMS gyroscope designs developedand implemented more recently have exhibited improvedperformance11, they are also associated with substantiallyincreased fabrication and operational complexity.The various sources of noise in micromechanical sys-
tems12 and nanoscale resonators13 have been extensivelystudied with regard to their impact on the performance ofMEMS sensors. It is well-established that evaluation ofthermomechanical noise in CVGs can be useful inassessing the ultimate limit of their performance14 and, inturn, making conclusions about potential improvementsin practically achievable figures of merit15. However, thereal-world performance of any MEMS gyroscope is typi-cally affected more strongly by the multiple additionalsources of noise and drifts associated with the readout andoverall mechanical stability of the device rather than bythermomechanical noise. As a result, various advanceddesigns and transduction methods that minimize driftsand noise in MEMS have been explored to implementCVGs with improved performance16,17. It should be notedthat these strategies focus mostly on complex designs thatincrease the Q factor, optimize the transduction efficiency,improve the sensitivity of the electronic readout method,and facilitate integration of CVGs onto MEMS chips. Onthe other hand, the important question of whether min-iature CVGs with navigation-grade performance are fun-damentally feasible has received relatively little attentionin the recent literature.In our present proof-of-principle study, we use a dif-
ferential optical readout and focus on a micromechanicalCVG design that closely mimics the halteres, the gyro-scopic sensory organs of insects7,18. This type of design,with its inherent simplicity, can be straightforwardlyimplemented using well-established wafer-level proces-sing while also addressing traditional challenges in sen-sing extremely small mechanical deformations. Moreimportantly, due to advances in additive manufacturing,similar resonating structures can now be printed19 in
three dimensions using titanium-based alloys20. Further-more, recent advances in coherent light sources point to apromising path toward optical readout of CVGs withmeasurement of mechanical displacement that is belowthe shot-noise limit and that has a substantially improvedsignal-to-noise ratio21.
ResultsAnalytical models of CVGsTypically, the operation of a CVG is described by a
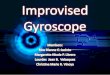
simplified model that involves a pair of coupled resonat-ing beams (tines) that can oscillate in two mutuallyorthogonal planes (Fig. 1). The Coriolis force can bedetected as the differential deflection of the tines in thedirection perpendicular to the elliptical structures shownin Fig. 1. The dynamics of oscillating structures in theCVG studied in this work can be described by two cou-pled second-order differential equations22. The equationsof motion for the combined system shown in Fig. 1 underthe influence of a periodic external force, Fy, and anangular frequency, Ωz, have been described previously22.An applied periodic force, Fy, causes the tines to oscil-
late along the drive axis with a maximum amplitude, Δy,and a maximum velocity, vy= ωyΔy. When a rotation rate,Ωz, is introduced along the z-axis, the Coriolis force, Fc=2mΩzvy, forces the tines to oscillate along the sense axiswith an amplitude, Δx, related to the rotation rate, Ωz, by
Sense axis
Fc = 2 m�
z Vy
Drive axisX
y
Vy
�y
�xz
�z
Fig. 1 Physical model of a double-tine CVG. The CVG is on aplatform that rotates horizontally, and the tines are actuatedperpendicularly to the platform. Note that this model is applicable to awide variety of resonator shapes, such as a tuning fork or similar
Lavrik and Datskos Microsystems & Nanoengineering (2019) 5:47 Page 2 of 11

ref. 23
Δx ¼ 2Δy ωy
ω2x
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
1� ω2y
ω2x
� �2þ 1
Q2x
ω2y
ω2x
r Ωz ð1Þ
where Ωz is the angular frequency along the z-axis, ωy=(ky/m)1/2 and ωx= (kx/m)1/2 are, respectively, the reso-nance frequencies of the tines along the y axis (drive axis)and x axis (sense axis), Qy and Qx are, respectively, thequality factors of the oscillation along the drive axis andsense axis, and m is the effective mass of the oscillator.
To determine the sensitivity of the CVG studied in thiswork and its ultimate performance limit, we need toevaluate the noise-equivalent rotational rate, ΩNER, whichis defined as the rotational rate at which the signal-to-noise ratio of the CVG equals unity24. Using Nyquist’srelation14,23 for the spectral density of the fluctuatingforce related to the CVG, we obtain for a bandwidth, B,the thermal noise-equivalent rate, ΩNER
23.
ΩNER ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
kBTBωx
mΔy2 ω2yQx
s
ð2Þ
In inertial navigation systems, the measured rotationrate is integrated over time to determine the orientation,and depending on the integration time, different noisesources can introduce errors25,26. Thermomechanicalnoise represents the lowest noise floor fundamentallyachievable in any MEMS CVG. Therefore, Eq. (2) can beused to analyze the fundamentally limited performance ofa CVG as a function of resonance parameters, mass, anddriving amplitude.The tuning fork used in the present work can be excited
in such a way that two equal-proof masses are forced intoantiphase oscillations along the drive axis. The oscillationdue to the driving force is parallel to the support plane,whereas the sensing direction (sense axis) is perpendicularto the driving force. Under these conditions, the oscil-lating tines respond to angular rate inputs in directionsopposite to each other because of opposite Coriolis forces.The differential response is expected to be nearly immuneto linear acceleration, which causes deflection of the tinesin the same direction.From Eq. (2), the fundamentally limited performance of
the CVG has a straightforward dependence on the valuesof the proof mass, driving amplitude and quality factor ofthe sensing tines. From this perspective, it would bebeneficial to have the largest possible tuning fork struc-ture driven with the largest possible amplitude while alsominimizing any losses that negatively impact the qualityfactor. However, these measures would counteract thegoal of miniaturization. Therefore, there is a nontrivialtrade-off between the concept of scaling down CVG
designs and their optimization from the standpoint offundamentally limited performance. This trade-off, alongwith the multidimensional nature of the parameter spaceinvolved in Eq. (2), represents the main challenge inoptimizing CVG designs. Furthermore, all the parametersin Eq. (2), particularly the proof mass, resonance fre-quencies, and driving amplitude, are interrelated andimpose boundaries on the values for realistic designs.To address this challenge, we made two important
assumptions regarding the CVG resonance frequencies,ωx and ωy. First, we assumed that the difference Δωbetween ωx and ωy is relatively small. This assumptionimplies mode-matching resonance conditions for thedrive and sense modes, which is known to provide max-imum gain and sensitivity due to a Q-amplified senseresponse27. However, in mode-matched operation, somenoise and drift sources tend to also be amplified. Thesense mode being shifted from the drive mode leads toimproved thermal stability while also reducing gain andsensitivity. Therefore, a small difference between ωx andωy can be considered optimal. Second, we assumed thatthere is a limited range of practically feasible resonancefrequencies for miniature CVGs. While this range is dif-ficult to rigorously determine, it can be estimated fromprevious experimental and theoretical studies oncantilever-like structures and MEMS devices. Most CVGsoperate in the kHz range28–30 due to the susceptibility oflower-frequency mechanical resonators to externalvibrations. Microcantilevers used in scanning probemicroscopy have resonance frequencies in the range from~2 to 200 kHz. The lower end of this range is of particularinterest to us because the lower the frequency is, thegreater the amplitude that can be achieved in a CVG for agiven Q factor, proof mass, and driving force.To guide our designs, we calculated the noise-
equivalent rotation (NER) limited by the thermo-mechanical noise as a function of proof mass for CVGswith different Q factors while maintaining the resonancefrequency and driving amplitude constant. In Fig. 2, weshow the calculated ΩNER for a CVG as a function ofeffective mass, meff, and different quality factors. In thesecalculations, we used a realistic (for our design) actuationamplitude, Δy= 10–3 m, drive and sense-mode fre-quencies, ωy= 2.1 × 104 rad s−1 and ωx= 1.7 × 104 rad s−1.In Fig. 2, we also show the limits of performance requiredfor gyroscopes for different applications (e.g., consumer,automotive, tactical, and navigation)16,25,31.Figure 2 shows that navigation-grade CVGs are funda-
mentally possible when the proof mass is >10−6 kg, evenwith Q factors in the range from 103 to 105. It should benoted that the dependence of ΩNER on the proof massshown in Fig. 2 is likely to overestimate the performanceof smaller CVGs because their excitation with millimeter-scale amplitudes is not necessarily feasible.
Lavrik and Datskos Microsystems & Nanoengineering (2019) 5:47 Page 3 of 11

A series of iterative parametric sweeps performed inCOMSOL allowed us to identify a CVG geometry with aproof mass on the order of 10−6 kg and resonance fre-quencies close to 3 kHz (Fig. 3). The total mass of a silicontuning fork with this geometry was calculated to be 2.45 ×10−6 kg. It is important to note that effective proof massesand bending rigidities are somewhat different for eachmode. As a reasonable approximation, we can calculatethe effective mass for antiphase modes by assuming thateach tine is analogous to a cantilever with an effectivemass equal to one-fourth of its total mass. For the siliconfork shown in Fig. 3, this approximation gives an effectiveproof mass of ~4.2 × 10−7 kg. The antiphase drive andsense-mode spring constants are calculated to be 170 and190 Nm−1, respectively.Our eigenfrequency analysis performed in COMSOL
revealed the four lowest modes that are of the greatestimportance to the operation of the designed CVG. Inaccordance with the type of deformation involved in thesefour modes (shown in Fig. 3a–d), we will refer to them as(a) in-phase drive, (b) in-phase sense, (c) antiphase drive,and (d) antiphase sense modes. The values of the reso-nance frequencies corresponding to these modes are (a)
10–3
10–4
10–5
10–6
10–7
10–8
10–11
Strategic
Navigation
Tactical
Q = 10 4
Q = 10 3
Q = 10 5
10–9 10–7
meff (kg)
�N
ER (
° s–1
)
10–5 10–3
Fig. 2 Calculated NEΩ as a function of CVG proof mass, m, fordifferent quality factors, Q. The driving amplitude is 10–3 m, and thedrive and sense-mode frequencies are ωy= 2.1 × 104 rad s−1 and ωx
= 1.7 × 104 rad s−1, respectively. The dashed lines show the NEΩ fordifferent grade gyroscopes
e
fc d
a b
In-phasemode
Antiphasemode
1 mm
1 mm
Fig. 3 Eigenfrequency analysis for the CVG structures showing the four lowest modes. a in-phase (bending) drive mode of 2.01 kHz, b in-phase(bending) sense mode of 2.64 kHz, c antiphase (bending) drive mode of 3.2 kHz, and d antiphase (torsional) sense mode at 3.38 kHz. Also shown isthe stroboscopic visualization of the driving modes: e in-phase motion of the tines (asymmetric mode) and f out-of-phase motion of the tines(symmetric mode). The double arrow indicates the direction of the applied excitation
Lavrik and Datskos Microsystems & Nanoengineering (2019) 5:47 Page 4 of 11

2.01 × 103 Hz, (b) 2.64 × 103 Hz, (c) 3.2 × 103 Hz, and (d)3.38 × 103 Hz.It should be noted that the exact shape of the defor-
mations associated with each mode is very important fortwo main reasons. First, analysis of the deformationsallowed us to differentiate in-phase and antiphase modesand conclude that the Coriolis response should contributeto the antiphase sense mode when the antiphase drivemode is excited. Second, we can identify the regionswhere the greatest deformations and, in turn, stresses(color coded red corresponding to the maximum stress inFig. 3a–d) are localized. The latter is key to further opti-mization of the CVG designs in terms of mode coupling,mechanical robustness, and ability to operate with verylarge vibration amplitudes. While such optimization isbeyond the scope of the current study, our simulationsindicate that among the four modes, the in-phase driveand sense modes are associated with the most significantstresses localized in the neck region of the tuning fork.Because the in-phase drive and sense modes can bereadily excited by linear acceleration, an increase in thecross-section of this region and/or a decrease in its lengthcan lead to CVG designs that are more immune to shockand linear acceleration. At the same time, a narrower neckregion would lead to reduced clamping losses and, in turn,higher Q factors. Finally, frequency spreads betweenvarious modes are strongly affected by the exact shapeand sizes of the neck region. In the tuning fork designselected for fabrication, the antiphase drive and sensemodes are separated by only 180 Hz according to oursimulations. This frequency spread can be furtherdecreased by making the cross-section of the neck region
somewhat smaller. However, the effect of a narrower neckis not limited to a reduced frequency spread betweenthese modes. It will also lower the frequencies of in-phasesense and drive modes and make the whole structuremore susceptible to linear acceleration and mechanicalshocks. Therefore, further improvements in the CVGdesign would involve a nontrivial optimization of the necksize and overall shape geometry of the structure.
Experimental characterizationWe verified that the implemented CVG structures could
be resonantly driven with amplitudes approaching 10−3 mnear a frequency of 3 kHz. Depending on the way that thetuning fork was mounted in the piezo-driven stage,asymmetric (in-phase) or symmetric (antiphase) drivemodes could be excited. In Fig. 3e, f, we also show opticalimages of the tuning fork oscillating in the asymmetricmode (Fig. 3e) and symmetric mode (Fig. 3f) understroboscopic lighting. Owing to stroboscopic lighting, thetines captured in each image in Fig. 3e, f correspond todifferent phases of the oscillation. The approximateamplitude of the drive-mode oscillation was estimatedfrom these images to approach 10−3 m. An overview ofthe frequency response of the actuated CVG is shown inFig. 4a. The frequency response was measured using alock-in amplifier with a sweep generator connected to theposition-sensitive detector (PSD) and the piezo-actuator.The measured frequency spectrum shows a clear sign of
resonance response at ~2.67 kHz. Taking into accountour COMSOL simulations, we can conclude that thisresonance corresponds to the in-phase sense mode. Fromthe measured frequency response shown in Fig. 4a, we
Sensefrequency
Sensemode
Drivemode
1 V excitationNo excitation
10–8
a b
10–9
Am
plitu
de, �
x (m
)
Am
plitu
de, �
x (m
Hz–1
/2)
10–10
10–11
10–8
10–7
10–9
10–10
10–11
101 102 103 1042400 2600 2800 3000
Frequency (Hz) Frequency (Hz)
3200 3400
Actuatorfrequency
Drivefrequency
Fig. 4 CVG response as a function of frequency. a Frequency response of the actuated CVG. The sense-mode frequency was smaller than thedrive-mode frequency, which, in turn, was smaller than the piezo-actuator resonance: fsens < fdr < fpiezo. b Frequency response of the CVG with andwithout excitation demonstrating the readout noise, driving and sensing modes, and coupling between modes during excitation. The readout noiseis <10−10 m Hz−1/2. The actuation does not affect the baseline noise for f > 100 Hz. Mode coupling can cause the sensing tine to oscillate when CVG isactuated
Lavrik and Datskos Microsystems & Nanoengineering (2019) 5:47 Page 5 of 11

determined the value of Qs= 6.8 × 103. On the otherhand, the antiphase sense mode corresponds to dynamicdeformations under Coriolis force.The resonance feature shown in Fig. 4a at 3.207 × 103 Hz
matches the frequency used to excite the antiphase drivemode in our previous experiments (Fig. 3f) and is close tothe prediction for the antiphase drive mode from oureigenfrequency analysis. We want to point out that deflec-tion of the tines in the drive mode does not directly con-tribute to deflection of the probing beam, which can explainthe absence of the conventional Lorentzian shape in thefrequency response around the drive mode. Finally, themore distinct resonance at 3.238 × 103 Hz was due to theresonance in the sample stage coupled to the piezo-stack.In Fig. 4b, we show a comparison of frequency
responses measured for the CVG with and without exci-tation in a wider range. As shown in Fig. 4b, the opticalreadout has a noise floor below 10−10 mHz−1/2 in thefrequency range above 100 Hz. In this frequency range,there was no measurable increase in the noise floor whenthe drive mode was excited. Nonetheless, excitation of thedrive mode caused a significant increase in the noise inthe low-frequency part of the spectrum (below 100 Hz).This increase can be explained by substantial mode cou-pling in the implemented device.In addition, we characterized the CVG by measuring the
temporal responses to rotation using both nondifferentialand differential optical readouts. The motion of each sensingtine was detected either separately using a nondifferentialreadout or as the difference between Coriolis responses fromthe two tines using a differential readout scheme.The CVG was driven at 3.207 × 103 Hz by applying an
excitation voltage of 1 V to the piezo-stack and excitingthe symmetric (antiphase) mode. This mode has the
advantage of generating the Coriolis forces exerted oneach tine in the opposite direction, while any spuriouslinear acceleration generates forces in the same direction.Figure 5a shows the temporal responses obtained in thenondifferential readout over a period of 80 s of continuousmeasurement by applying rotation rates Ωz of 2.5, 5, and10° s−1.A typical calibration plot obtained using the non-
differential readout is shown in Fig. 5b. The calibrationplot can be approximated by a linear trend with a negli-gible offset and a correlation coefficient of 0.999.From the data obtained with the nondifferential mea-
surement method, we estimated the lowest resolvablerotational rate to be <0.5° s−1. Next, we recorded theresponses of the CVG to rotation using the differentialmeasurement method (Fig. 6). Compared to the non-differential measurements, the differential measurementsresulted in a signal-to-noise ratio approximately threetimes higher. The lowest rotational rate resolvable withdifferential readout was estimated to be <0.16° s−1. In thiswork, the maximum rotational rate we measured was 9 ×103° s−1, which gives a dynamic range32 of ~90 dB. For ourexperimental conditions, using Eq. (2), we estimated thethermal noise-equivalent rate, ΩNER, to be 4.4 × 10−7° s−1
and a scale factor [Eq. (1)] of ~8.1 × 10−9 m (° s−1)−1.To quantify the performance of the CVG more rigor-
ously and characterize its Allan variance, we measured thebaseline for a time period of 103 s. Figure 7 shows theresulting Allan deviation (solid curve) as a function oftime, τ. The Allan deviation fits on a straight line with aslope of −0.956 for times >4 s. For shorter times, theobserved leveling off of the Allan deviation is due to thelock-in amplifier integration time (0.3 s) used in ourmeasurements. The slope of approximately −1 in the
1500a b
1000
500
0
–500
–1000
–1500
15
10
5
0
–5
–10
–150 20 40
Time (s) Rotation rate, �z (° s–1)
�z = –1.156 + 6.812 �xR = 0.999
Am
plitu
de, �
x (n
m)
Am
plitu
de, �
x (n
m)
60 80 –80 –60 –40 –20 0 20 40 60 80
2.5° s–1
5° s–1
10° s–1
Fig. 5 Temporal and rotational response of the CVG. a Responses of the CVG measured using nondifferential measurements. b A typicalcalibration curve obtained for a CVG structure in a nondifferential regime. The optical readout gain is 2.5 mV nm−1
Lavrik and Datskos Microsystems & Nanoengineering (2019) 5:47 Page 6 of 11

Allan deviation plot is characteristic of quantizationnoise33. Therefore, for the differential measurements, thegyroscope with our optical readout exhibits a quantizationnoise of 0.11° and a bias instability of <0.5° h−1. Thedashed curve corresponds to the estimated thermo-mechanical noise of the CVG, with a theoretical anglerandom walk of 2.1 × 10−5° h−1/2.
DiscussionIn the current proof-of-principle study, we used an open
control loop system to drive a piezo-transducer. Whenoperated in a controlled laboratory environment (T=22 ± 1 °C), it provided stable amplitudes of the tuning forktines to within 0.1%. Furthermore, using stroboscopicvisualization, we were able to visually monitor the tuningfork motion. However, a closed control loop will be
required in the actual implementation of a fieldable gyrobased on the principles described in this work. We envi-sion that in an actual practical device, the amplitude ofboth the actuating and sensing tines will be read usingsimilar optical methods. We should point out that highprecision motion control using optical PSD technologyhas already been successfully implemented in variouscommercial devices, such as the latest generation ofscanning galvanometers, which exhibit very high stabilitywith a reproducibility of 10−6 rad34.An important question arises regarding the key factors
responsible for the experimentally measured noise presentin our CVG prototype at levels 3–4 orders of magnitudeabove the thermomechanical noise limit. Depending onthe averaging time, a variety of stochastic processes canaffect the overall noise level and stability of a CVG. Froma purely phenomenological viewpoint, these stochasticprocesses can be classified as angle random walk, corre-lated noise, bias instability, and rate random walk. ForMEMS gyroscopes in general, the three most commonlydiscussed noise mechanisms are thermal noise, electro-nics flicker noise, and accumulation of white noise22. Asapplied to the optically read CVG studied in our presentwork, the flicker noise manifests itself in both laser noiseand PSD noise. Laser noise is known to be a dominantfactor that limits the spatial accuracy and stability ofoptical readouts at the level of tens of picometers, which isconsistent with our experimentally measured frequencyresponses shown in Fig. 4a, b. To approach the theoreticallimit of 1.6 × 10−4° h−1, surmounting the limitationsimposed by laser noise would be critical.In the present study, we used an “optical lever” readout
assembled in-house using readily available off-the-shellcomponents without any further optimization. It is well-established that the dominant noise source in unopti-mized optical readouts, such as the one used in the pre-sent study, is laser noise12. The readout noise floor in thiswork was approximately < 10−10 Hz−1/2. In our previousstudies, we have shown that one way to overcome thelaser noise threshold is to operate laser diodes slightlybelow their lasing threshold35. In fact, optimized opticalreadouts can achieve very low noise floors and are com-parable to other types of MEMS readouts. For example, anoptical readout of 35–125 μm long cantilevers provided adefection sensitivity better than 10−15 m Hz1/236. Com-mercially implemented optical readouts in Doppler vib-rometers can reach a resolution of 30 fmHz−1/237.Commercially available atomic force microscopes with anoptical readout routinely reach a noise level of ~10−12
m38. Perhaps a promising path toward optical readouts ofCVGs with substantially improved signal-to-noise ratios21
is adaptation of approaches developed recently in theareas of gravitational wave detection and optical quantumcomputing.
100
50
0
–50
–1000 200 400
Time (s)
Am
plitu
de, �
x (n
m)
600
0.5° s–1
800
Fig. 6 Temporal response of the CVG. Responses of the CVGmeasured using the differential optical readout method
103
102
101
100
10–1
10–2
10–3
10–4
1 10 100Integration time (s)
CVG + readoutThermomechanical
Slope = –0.5
Slope = –0.956
Alla
n de
viat
ion
(° h
–1)
1000
Fig. 7 Allan deviation plot of the CVG. The response of the CVG wasmeasured using differential measurements. The dashed curvecorresponds to the estimated thermomechanical noise of the CVG
Lavrik and Datskos Microsystems & Nanoengineering (2019) 5:47 Page 7 of 11

Our analysis indicates that navigation-grade perfor-mance (10−2° h−1) is fundamentally feasible for a CVGwith a proof mass in the 10−6 kg range driven tomillimeter-scale amplitudes at frequencies of a few kHz.According to theoretical and computational guidance, weimplemented an entirely mechanical silicon CVG struc-ture with a thermomechanical noise floor well belownavigation-grade performance. However, the experimen-tally determined performance of the implemented CVGwas not limited by the fundamental noise source. Inparticular, the smallest resolvable rotational rates mea-sured were ~0.16°s−1, whereas our analysis of the Allandeviation plot revealed a bias instability noise of ~0.5° h−1.It can be concluded that these experimentally determinedfigures of merit are limited by the noise and instabilities ofthe optical readout, which are on the order of a fewnanometers in terms of detectable deflections of the CVGtines. This conclusion points to two immediate strategiesfor developing a miniature CVG approaching navigation-grade performance. First, larger responses can be achievedby increasing the Q factors of both drive and sense modeswhen the CVG is operated under vacuum conditions.Second, the readout noise can be minimized by using thesame coherent source to generate two light beams for thetwo channels of the differential readout. Additionalimprovements can be achieved by combining signals fromdifferent coherent sources as well as by averaging signalsfrom several tuning fork structures32,39. Optimization ofthe CVG design can further reduce the noise and increaseperformance. In Table 1, we highlight specifications andperformance metrics for the CVG studied in this workalong with alternative existing state-of-the-art gyroscopetechnologies.In the present study, the CVG with an optical readout
was found to exhibit a bias instability of <0.5° h−1, which isa factor of ~50 lower than the performance of 0.01° h−1 for
state-of-the-art gyroscopes. For example, a MEMS diskresonator gyroscope40 was recently shown to have a biasinstability of <0.04° h−1 with a long decay time of 74.9 s.This impressive performance for a MEMS gyroscoperequires complex mechanical structures with a nontrivialfabrication process. The fabrication of the CVG structureswe report in this work are relatively simple, and since thesensitivity of the optical readout can be substantiallyimproved, we expect that in future studies, the perfor-mance of the CVG described here will also be improved.For example, in the present study, the position sensitivitywas < 10−10 Hz−1/2, and achieving a 50× or betterimprovement in the performance of the CVG gyro willrequire an optical readout sensitivity of ~10−12 mHz−1/2.This requirement seems realistic since optical readoutsensitivities of <10−14 m have already been demonstratedin commercially available optical readouts37.A potential path to miniaturization for the CVG based
on the principle described in this work is clearly indicatedby recent advances in on-chip optical processing. Opticalreadouts have already been made smaller (digital versatiledisc and Blu-Ray players use miniaturized optical read-outs), and on-chip integration of optical sources is anactive area of research. In a recent work, the combinationof integrated silicon photonics and MEMS was used todemonstrate position measurement on the picometerscale under ambient conditions41. The path toward fur-ther miniaturization of a device based on the MEMSCVGs described in this work is directly linked to con-tinued advances in on-chip optical processing. While fullyintegrated photonic circuits are not a mature technologyyet, a number of complex on-chip optical systems havealready been demonstrated42–46. Ultimately, this work hasthe potential to make feasible optical readouts that inte-grate multiple lasers sources, optical elements and opticalsensing and electronic processing on a chip with a
Table 1 Performance metrics of the optically read micromechanical CVG and state-of-the-art gyroscopes40,50–52
Parameter Optically read CVG FOGa MEMS MEMS DRGb Units
Dimensions
Sensing element (8 × 5 × 2.5) × 10−11 (8 × 6 × 7) × 10−9 (4 × 4 × 3) × 10−12 (0.03)2 × 5 × 10−4π m3
Gyroscope 0.2 × 0.4 × 1 (2 × 7 × 7) × 10−6 (1 × 1 × 4) × 10−7 (1 × 1 × 4) × 10−7
Mass
Sensing element 2.45 × 10−6 kg
Gyroscope ~10 (lab system) <1.5 × 10−2 5 × 10−2 10−2
Drive mode 3.238 × 103 ~104 ~2 × 103 Hz
Sense mode 2.670 × 103 ~104 ~2 × 103 Hz
Minimum displacement 2.5 × 10−9 N/A <10−14 <10−14 m
Quantization noise 1.1 × 10−1 <10−3 <10−2 <10−3 °
Bias instability <5 × 10−1 <5 × 10−3 <10−1 0.04 ° h−1
Angle random walk ~10 <10−2 <10−1 10−2 ° h−1/2
Range ±9 × 103 ±103 ±103 ±102 ° s−1
aFiber optic gyroscopebDisc resonator gyroscope
Lavrik and Datskos Microsystems & Nanoengineering (2019) 5:47 Page 8 of 11

footprint similar to currently commercialized MEMSgyroscopes.Finally, in the present proof-of-principle study, we used
a relatively simple design and fabrication process of purelymechanical resonating structures that can be used asgyroscopes with an optical readout. Although similardesigns have been studied before, the combination of aMEMS CVG with an optical readout offers new oppor-tunities in both research and applications. As photoniccircuits continue to improve and be integrated on-chipwith mechanical devices, success on the path toward CVGminiaturization will strongly depend on the implementa-tion of suitable materials, photon sources, optical sensingsystems, and processes compatible with foundry-levelfabrication47.
Materials and methodsTo overcome the limitations and drawbacks of previous
CVG designs, we focused on an approach that takesadvantage of silicon resonating structures that can bebatch-fabricated using relaxed design rules due to theabsence of on-chip electronics. Using well-establishedphotolithographic patterning and wafer-scale proces-sing48, we implemented resonator geometries compatiblewith large oscillation amplitudes and, in turn, oscillationvelocities. Furthermore, a modular optical readout basedon discrete components eliminates potential electronicinterference without increased fabrication cost andcomplexity.
CVG design and finite-element analysisTo generate tuning fork geometries for fabrication, we
used the following rationale. We focused on a symmetricgeometry with an anchoring region crossing the symmetryplane to minimize clamping losses using an analogy to aclassic macroscopic tuning fork. A short neck region witha curved geometry provided mechanical coupling betweenthe two tines. Smooth transitions between differentregions of the CVG structure were aimed at minimizinglocalized stresses and reducing the likelihood ofmechanical failures of the CVG when driven to highamplitudes or subjected to mechanical shocks. The nearlysquare cross-section of the tines ensures that their flexuralrigidities in two mutually orthogonal planes correspond-ing to the drive and sense modes are approximately thesame. Because both the effective proof masses andbending rigidities corresponding to the drive and modesare similar, these modes have similar frequencies and canbe made to match.The vibrational modes corresponding resonance fre-
quencies inherent to a specific tuning fork geometry werequantified by performing eigenfrequency analysis inCOMSOL multiphysics software. Our models relied onlinear elastic approximations. To calculate resonance
frequencies as a function of the tuning fork size andshape, we compiled a series of three-dimensional modelsand carried out geometrical sweeps.
MicrofabricationWe used a straightforward microfabrication sequence
that relied on single-layer photolithography and deepreactive etching as the main steps. The CVG geometrywas a V-shaped tuning fork type with two elliptical fea-tures at the end of each tine. The process flow started withphotolithographic patterning of CVG shapes on a 100-mm Si wafer that had 1 μm of thermally grown SiO2 onboth sides. After exposing and developing the photoresist(SPR 220-3.0 MicroChem Inc.), the patterns were etchedinto the oxide on the front side of the wafer usingfluorine-based (CHF3/O2 or C4/F8 processing gases)reactive ion etching. Once the oxide was etched throughthe patterned areas, the wafers were processed using adeep reactive etch (Bosch process). The etch processcontinued until the etching through the wafer stopped onthe SiO2 layer present on the backside of the Si wafer. Thefinal step included removal of any residual photoresistwith oxygen plasma and removal of SiO2 with a solutionof hydrofluoric acid. Using the processing sequence out-lined earlier, we fabricated a series of V-shaped CVGstructures with varying sizes. A wafer with the fabricatedCVG structures is shown in Fig. 8a, and Fig. 8b shows aclose-up of one of the CVG structures used in the presentstudy. The CVG structures had a length l= 8 × 10−3 m, awidth w= 5 × 10−4 m, and a thickness t= 2.50 × 10−4 m.
CVG characterizationWe characterized individual CVG structures using the
experimental setup shown in Fig. 8c, d. The overall size ofthe system we used in our studies was ~0.2 m3 andincludes all the measurement equipment, the electronicsand the rotation table. The size of the gyroscope MEMSdevice with the readout lasers and detectors was ~10−6
m3. The CVG structures used were measured as stand-alone devices in an open-loop configuration using a net-work analyzer and a lock-in amplifier. The individualCVG structures were secured in an aluminum fixtureactuated using a miniature piezo-stack connected to asignal generator. The frequency generator provided eithera constant drive frequency or a frequency sweep in therange from ~100 Hz to 20 kHz.Optical readout techniques for MEMS are typically
based on reflecting a focused or collimated laser beamfrom the free end of a cantilever and subsequently mea-suring the position of the reflected light spot projectedonto a segmented photodiode or position-sensitive pho-todetector. The use of a spatially sensitive photodiodeallows the measurement of the position of the reflectedlaser spot, which, in turn, allows the determination of the
Lavrik and Datskos Microsystems & Nanoengineering (2019) 5:47 Page 9 of 11

cantilever deformation. This particular implementation ofthe optical readout method was first proposed for use inatomic force microscopy49. The dynamic deformations ofthe CVG tines were detected and quantified using thiscontactless optical readout method. To measure themotion of both tines, two separate laser beams werefocused on the elliptical features at the ends of each tine,as shown in Fig. 8c. The laser photons reflected from eachtine were captured by two position-sensitive detectors.This configuration allowed us to measure the motion ofeach tine separately (nondifferential measurement) anddetermine the difference in displacement between the twotines (differential measurement).Nondifferential and differential signals of the oscillating
tines were analyzed in the frequency range from 1 to20 kHz using a lock-in amplifier. Geometrical evaluationsof our setup along with calibration allowed us to convertthe PSD output signal into a physically meaningfulmechanical deflection of each tine. The conversion coef-ficient for our configuration was 2.5 mV nm−1. A digitalcamera operating at 60 frames per second was used tovisualize the motion of CVG tines under stroboscopicillumination. The complete system was mounted on astepper motor-driven rotational stage that provided con-sistent rotational rates in the range from 2.78 × 10−3 to
278° s−1. The temporal responses of the CVG to rotationwere recorded without any additional signal processing orfiltering.Spectral analysis of the motion of the CVG tines was
carried out to gain insights into the CVG operation,performance, and noise. The resonance frequencies andquality factors of the CVG modes were evaluated byanalyzing the output signal from each PSD using either aspectrum analyzer or a lock-in amplifier and were con-sistent with the eigenfrequency analysis of the CVG tun-ing fork geometry.
AcknowledgementsThe work performed was supported by the Laboratory Directed Research andDevelopment program at Oak Ridge National Laboratory. A portion of thisresearch was conducted at the Center for Nanophase Materials Sciences,which is a DOE Office of Science User Facility. Oak Ridge National Laboratory isoperated for the U.S. Department of Energy by UT-Battelle under Contract No.DE-AC05-00OR22725. This work was authored [in part] by the NationalRenewable Energy Laboratory, operated by the Alliance for Sustainable Energy,LLC, for the U.S. Department of Energy (DOE) under Contract No. DE-AC36-08GO28308. Funding is provided by the U.S. Department of Energy Office ofEnergy Efficiency and Renewable Energy Wind Energy Technologies Office.The views expressed in the article do not necessarily represent the views of theDOE or the U.S. Government. The U.S. Government retains and the publisher,by accepting the article for publication, acknowledges that the U.S.Government retains a nonexclusive, paid-up, irrevocable, worldwide license topublish or reproduce the published form of this work, or allow others to do so,for U.S. Government purposes.
ca
b d
PSD 2 PSD 1
Laser 1Laser 2
CCDcamera
Laser 2Laser 1
PSD 2PSD 1
Fig. 8 Microfabricated CVG and experimetal setup. a Si wafer with the microfabricated CVG structures. For CVG fabrication, we used 100-mm-diameter Si wafers that were 250-μm thick. b A close-up of an individual CVG structure. c Schematic illustration of the experimental setup, and d aphotograph of the implemented differential “optical lever” readout. The optical setup was mounted on a precision turntable for rotational ratemeasurements. The piezo-driven holder vibrates vertically at its point of attachment to the silicon tuning fork. All the optical readout componentsand the piezo-driven stage are mounted on the rotating platform and rotate together during characterization of rotational responses
Lavrik and Datskos Microsystems & Nanoengineering (2019) 5:47 Page 10 of 11

Authors’ contributionsN.V.L. microfabricated the arrays, helped with the measurements, and helpedwrite the manuscript. P.G.D. designed the experiments and helped with thepreparation of the manuscript.
Conflict of interestThe authors declare that they have no conflict of interest.
Supplementary information accompanies this paper at https://doi.org/10.1038/s41378-019-0087-9.
Received: 11 March 2019 Revised: 6 June 2019 Accepted: 7 July 2019
References1. Yazdi, N., Ayazi, F. & Najafi, K. Micromachined inertial sensors. Proc. IEEE 86,
1640–1659 (1998).2. Acar, C. & Shkel, A. MEMS Vibratory Gyroscopes: Structural Approaches to
Improve Robustness (Springer Science & Business Media, 2008).3. Yoon, S., Park, U., Rhim, J. & Yang, S. S. Tactical grade MEMS vibrating ring
gyroscope with high shock reliability. Microelectron. Eng. 142, 22–29 (2015).4. Greiff, P., Boxenhorn, B., King, T. & Niles, L. Silicon monolithic micromechanical
gyroscope. In 1991 International Conference on Solid-State Sensors and Actua-tors, 1991. Digest of Technical Papers, TRANSDUCERS'91, 966–968 (1991).
5. Lutz, M. et al. A precision yaw rate sensor in silicon micromachining. Solid StateSens. Actuators 2, 847–850 (1997).
6. Norgia, M. & Donati, S. Hybrid opto-mechanical gyroscope with injection-interferometer readout. Electron. Lett. 37, 756–758 (2001).
7. Chan, W. P., Prete, F. & Dickinson, M. H. Visual Input to the efferent controlsystem of a Fly's "Gyroscope". Science 280, 289–292 (1998).
8. Droogendijk, H., Brookhuis, R. A., de Boer, M. J., Sanders, R. G. P. & Krijnen, G. J.M. Towards a biomimetic gyroscope inspired by the fly's haltere. J. R. Soc.Interface 11, 20140573 (2014).
9. Shaeffer, D. K. MEMS inertial sensors: a tutorial overview. IEEE Commun. Mag.51, 100–109 (2013).
10. Wen, H., Daruwalla, A. & Ayazi, F. Resonant pitch and roll silicon gyroscopeswith sub-micron-gap slanted electrodes: Breaking the barrier toward high-performance monolithic inertial measurement units. Microsyst. Nanoeng. 3,16092 (2017).
11. Marek, J., Hoefflinger, B. & Gomez, U. M. CHIPS 2020 Vol. 2, 221–229 (Springer,2016).
12. Datskos, P. G., Lavrik, N. V. & Rajic, S. Performance of uncooled microcantileverthermal detectors. Rev. Sci. Instrum. 75, 1134–1148 (2004).
13. Cleland, A. N. & Roukes, M. L. Noise processes in nanomechanical resonators. J.Appl. Phys. 92, 2758–2769 (2002).
14. Gabrielson, T. B. Mechanical-thermal noise in micromachined acoustic andvibration sensors. IEEE Trans. Electron Devices 40, 903–909 (1993).
15. Annovazzi-Lodi, V. & Merlo, S. Mechanical–thermal noise in micromachinedgyros. Microelectron. J. 30, 1227–1230 (1999).
16. Allen, J. Micro-system inertial sensing technology overview. Rapp. Tech., SandiaNatl Lab. 48, 52 (2009).
17. Zhanshe, G. et al. Research development of silicon MEMS gyroscopes: areview. Microsyst. Technol. 21, 2053–2066 (2015).
18. Hengstenberg, R. Biological sensors: Controlling the fly's gyroscopes. Nature392, 757–758 (1998).
19. Credi, C. et al. Design, fabrication and testing of the first 3D-printed and wetmetallized z-axis accelerometer. Multidiscip. Digit. Publ. Inst. Proc. 1, 614 (2017).
20. Fiaz, H. S., Settle, C. R. & Hoshino, Ki Metal additive manufacturing for micro-electromechanical systems: Titanium alloy (Ti-6Al-4V)-based nanopositioningflexure fabricated by electron beam melting. Sens. Actuators A Phys. 249,284–293 (2016).
21. Pooser, R. C. & Lawrie, B. Ultrasensitive measurement of microcantilever dis-placement below the shot-noise limit. Optica 2, 393–399 (2015).
22. Trusov, A. A. Allan Variance Analysis of Random Noise Modes in Gyroscopes.Ph. D. Thesis, University of California, Irvine, CA, USA (2011).
23. Bao, M. H. Micro Mechanical Transducers: Pressure Sensors, Accelerometers andGyroscopes Vol. 8 (Elsevier, 2000).
24. Lavrik, N. V., Sepaniak, M. J. & Datskos, P. G. Cantilever transducers as a platformfor chemical and biological sensors. Rev. Sci. Instrum. 75, 2229–2253 (2004).
25. Grewal, M. & Andrews, A. How good is your gyro [ask the experts]. IEEE ControlSyst. 30, 12–86 (2010).
26. Kim, D. & M'Closkey, R. T. Spectral analysis of vibratory gyro noise. IEEE Sens. J.13, 4361–4374 (2013).
27. Jaber, N., Ramini, A. & Younis, M. I. Multifrequency excitation of a clamped-clamped microbeam: analytical and experimental investigation. Microsyst.Nanoeng. 2, 16002 (2016).
28. Guan, Y., Gao, S., Liu, H. & Niu, S. Acceleration sensitivity of tuning fork gyro-scopes: theoretical model, simulation and experimental verification. Microsyst.Technol. 21, 1313–1323 (2015).
29. Leland, R. P. Mechanical-thermal noise in MEMS gyroscopes. IEEE Sens. J. 5,493–500 (2005).
30. Xie, L. et al. A z-axis quartz cross-fork micromachined gyroscope based onshear stress detection. Sensors 10, 1573–1588 (2010).
31. Fitzgerald, A. M. Stanford Postion, Navigation and Time Symposium (StanfordUniversity, Stanford, CA, 2013).
32. Apostolyuk, V. Coriolis Vibratory Gyroscopes (Springer, 2016).33. El-Sheimy, N., Hou, H. & Niu, X. Analysis and modeling of inertial sensors using
Allan variance. IEEE Trans. Instrum. Meas. 57, 140–149 (2007).34. https://nutfieldtech.com/qs-7-opd-galvanometer-scanner/.35. Grbovic, D. et al. Uncooled infrared imaging using bimaterial microcantilever
arrays. Appl. Phys. Lett. 89, 073118 (2006).36. Fukuma, T. & Jarvis, S. P. Development of liquid-environment frequency
modulation atomic force microscope with low noise deflection sensor forcantilevers of various dimensions. Rev. Sci. Instrum. 77, 043701 (2006).
37. https://www.polytec.com/us/vibrometry/products/microscope-based-vibrometers/uhf-120-ultra-high-frequency-vibrometer/.
38. https://usa.jpk.com/products/atomic-force-microscopy/nanowizard-4-nanoscience/specifications.
39. Waters, R. L. & Swanson, P. D. Waters, R. L., & Swanson, P. D. U.S. Patent No.8,991,250. U.S. Patent and Trademark Office, Washington, DC (2015).
40. Li, Q. et al. 0.04 degree-per-hour MEMS disk resonator gyroscope with high-quality factor (510 k) and long decaying time constant (74.9 s). Microsyst.Nanoeng. 4, 32 (2018).
41. Putrino, G., Martyniuk, M., Keating, A., Faraone, L. & Dell, J. On-chip read-out ofpicomechanical motion under ambient conditions. Nanoscale 7, 1927–1933(2015).
42. Guzman, F., Kumanchik, L. M., Spannagel, R. & Braxmaier, C. Compact fullymonolithic optomechanical accelerometer. Preprint at http://arXiv.org/1811.01049 (2018).
43. Othman, A. M., Kotb, H. E., Sabry, Y. M., Terra, O. & Khalil, D. A. Toward on-chipMEMS-based optical autocorrelator. J. Light. Technol. 36, 5003–5009 (2018).
44. Rudé, M. et al. Interferometric photodetection in silicon photonics for phasediffusion quantum entropy sources. Opt. Express 26, 31957–31964 (2018).
45. Urino, Y. et al. High-density optical interconnects by using silicon photonics.-Gener. Opt. Netw. Data Cent. Short. Reach Links 9010, 901006 (2014).
46. Zhou, Z., Yin, B. & Michel, J. On-chip light sources for silicon photonics. Light.Sci. Appl. 4, e358 (2015).
47. Midolo, L., Schliesser, A. & Fiore, A. Nano-opto-electro-mechanical systems. Nat.Nanotechnol. 13, 11 (2018).
48. Datskos, P. G., Lavrik, N. V., Hunter, S. R., Rajic, S. & Grbovic, D. Infrared imagingusing arrays of SiO2 micromechanical detectors. Opt. Lett. 37, 3966–3968(2012).
49. Meyer, G. & Amer, N. M. Erratum: Novel optical approach to atomic forcemicroscopy [Appl. Phys. Lett. 5 3, 1045 (1988)]. Appl. Phys. Lett. 53, 2400–2402(1988).
50. https://www.draper.com/news-releases/draper-offers-high-performance-mems-gyroscope-autonomous-vehicle-market.
51. https://northropgrumman.litef.com/fileadmin/downloads/Datenblaetter/Datenblatt_uFors-3U_-3UC_-6U_-6UC.pdf.
52. El-Sheimy, N., Goodall, C., Abdelfatah, W., Atia, M. & Scannell, B. in Proc. of the25th International Technical Meeting of the Satellite Division of the Institute ofNavigation 1634–1640 (Ion Gnss, 2012).
Lavrik and Datskos Microsystems & Nanoengineering (2019) 5:47 Page 11 of 11





![Optomechanical sensing of wine-glass modes of a …...optically interrogated BAW resonator system is for it to be used as a Coriolis force sensing z-axis gyroscope. REFERENCES [1]](https://img.pdfslide.us/doc/110x75/5eaf06fb00d8ae6d1f134a6b/optomechanical-sensing-of-wine-glass-modes-of-a-optically-interrogated-baw-resonator.jpg)





![ELEC 7970 Advanced Sensors 2/4/15 - Auburn Universitydeanron/Lecture_20415.pdf · 2015-02-04 · ELEC 7970 Advanced Sensors 2/4/15 1) Tuning Fork Style MEMS Vibratory Gyroscope [1]](https://img.pdfslide.us/doc/110x75/5b28ac1f7f8b9a93618b484c/elec-7970-advanced-sensors-2415-auburn-deanronlecture20415pdf-2015-02-04.jpg)