Embed Size (px)
Citation preview
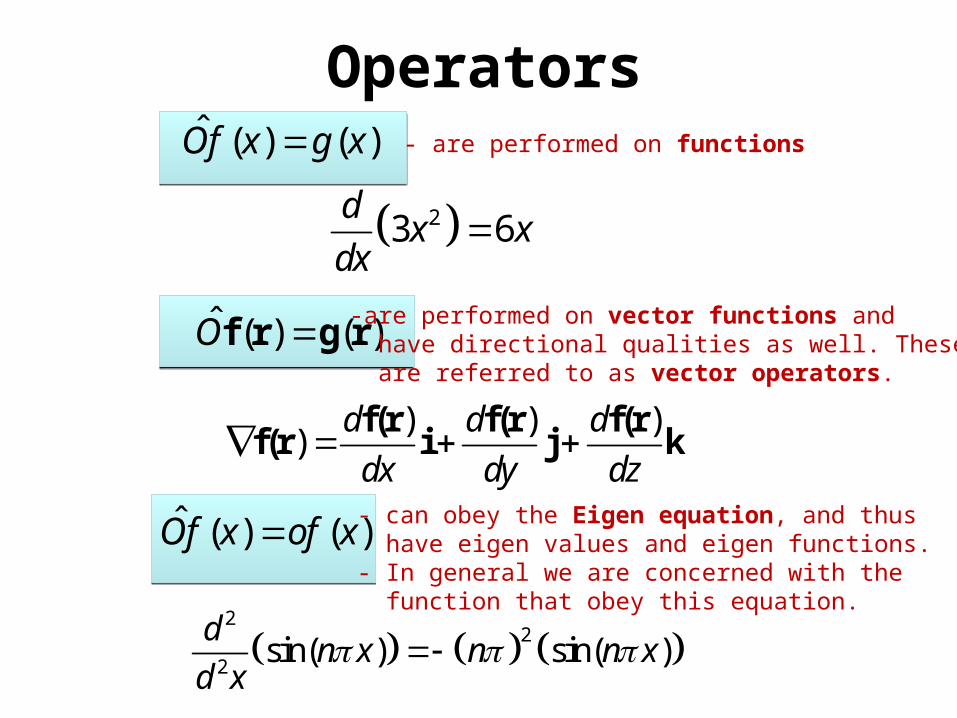
Operatorsˆ ( ) ( )Of x g x
23 6d
x xdx
ˆ ( ) ( )Of x of x
ˆ ( ) ( )O f r g r
) ) ))d d d
dx dy dz
f(r f(r f(rf(r i j k
2
2
2sin( ) sin( )
dn x n n x
d x
- are performed on functions
-are performed on vector functions and have directional qualities as well. These are referred to as vector operators.
- can obey the Eigen equation, and thus have eigen values and eigen functions.- In general we are concerned with the function that obey this equation.
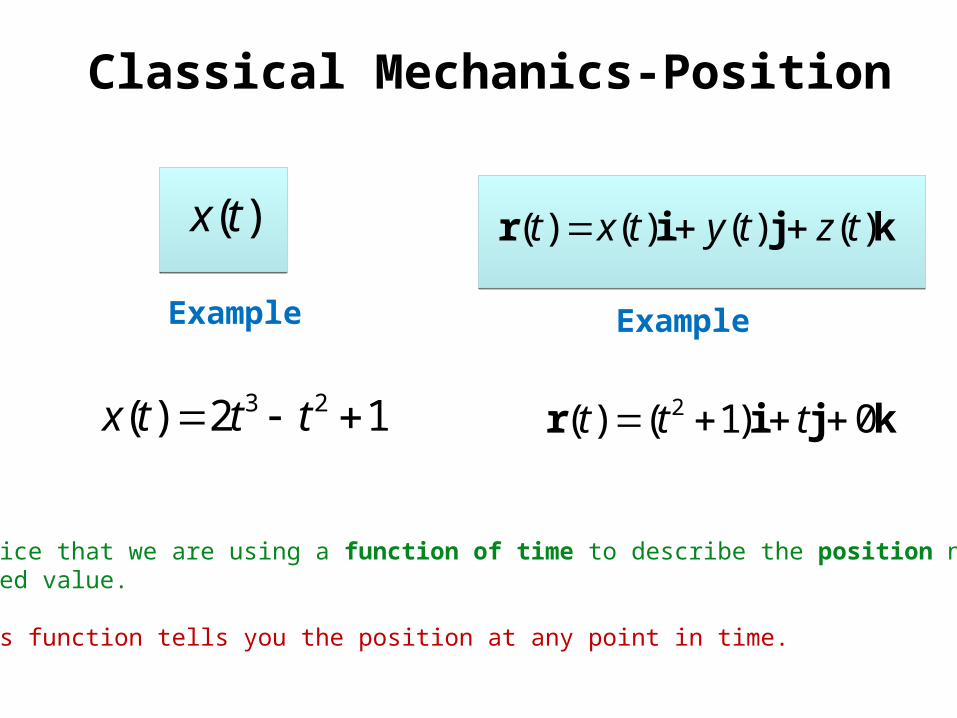
Classical Mechanics-Position
( )x t
3 2( ) 2 1x t t t
Example
( ) ( ) ( ) ( )t x t y t z t r i j k
2( ) ( 1) 0t t t r i j k
Example
Notice that we are using a function of time to describe the position not somefixed value.
This function tells you the position at any point in time.
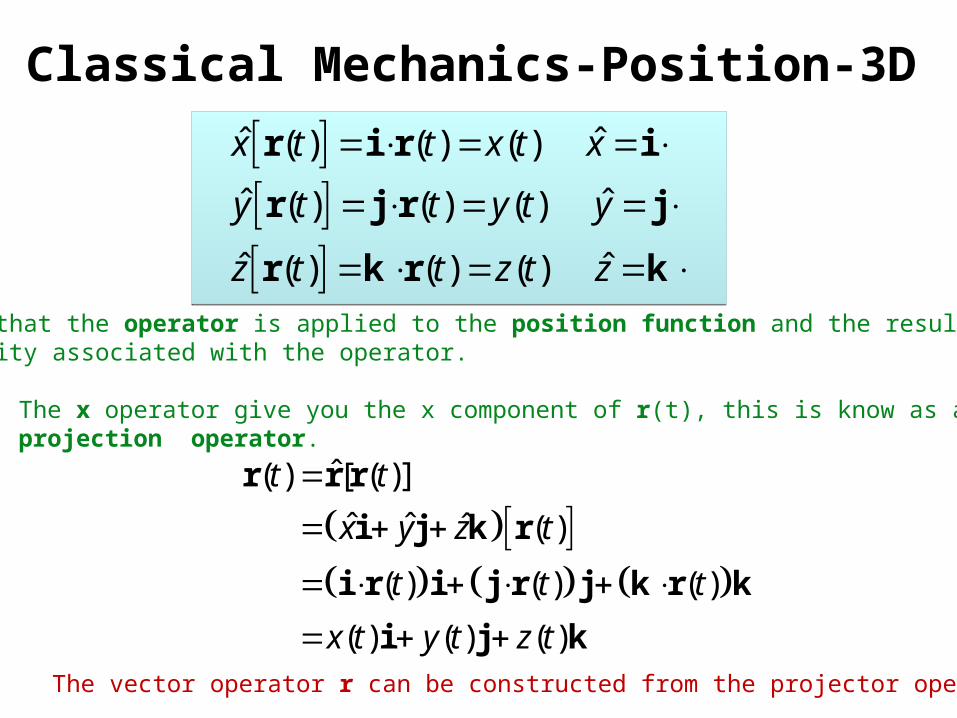
Classical Mechanics-Position-3D
ˆ ˆ( ) ( ) ( )x t t x t x r i r i
ˆ ˆ( ) ( ) ( )y t t y t y r j r j
ˆ ˆ( ) ( ) ( )z t t z t z r k r k
ˆ( ) [ ( )]
ˆ ˆ ˆ ( )
( ) ( ) ( )
( ) ( ) ( )
t t
x y z t
t t t
x t y t z t
r r r
i j k r
i r i j r j k r k
i j k
Note that the operator is applied to the position function and the result is the quantity associated with the operator.
Ie. The x operator give you the x component of r(t), this is know as a projection operator.
The vector operator r can be constructed from the projector operators.
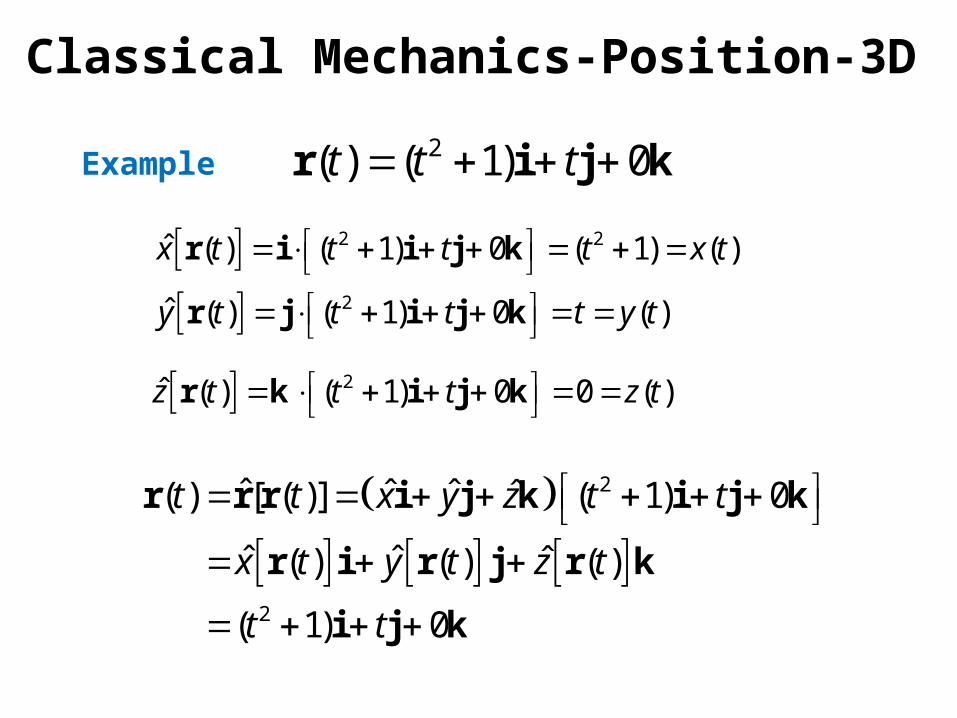
Classical Mechanics-Position-3D
2( ) ( 1) 0t t t r i j k
2 2ˆ ( ) ( 1) 0 ( 1) ( )x t t t t x t r i i j k
Example
2ˆ ( ) ( 1) 0 ( )y t t t t y t r j i j k
2ˆ ( ) ( 1) 0 0 ( )z t t t z t r k i j k
2
2
ˆ ˆ ˆ ˆ( ) [ ( )] ( 1) 0
ˆ ˆ ˆ( ) ( ) ( )
( 1) 0
t t x y z t t
x t y t z t
t t
r r r i j k i j k
r i r j r k
i j k
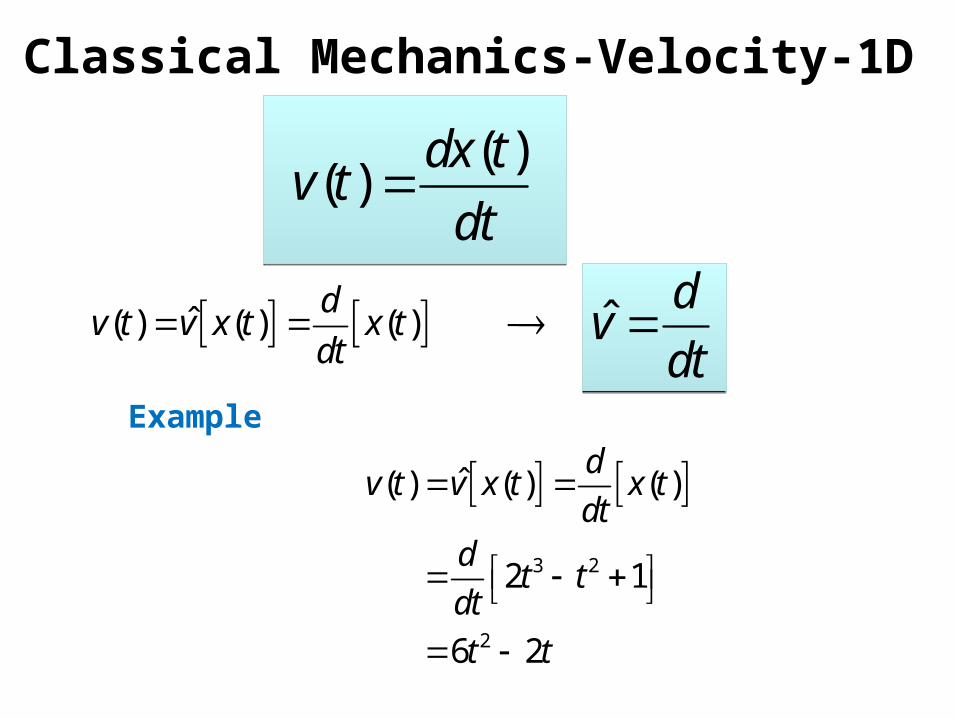
Classical Mechanics-Velocity-1D
( )( )
dx tv t
dt
ˆd
vdt
3 2
2
ˆ( ) ( ) ( )
2 1
6 2
dv t v x t x t
dtd
t tdt
t t
ˆ( ) ( ) ( )d
v t v x t x tdt
Example
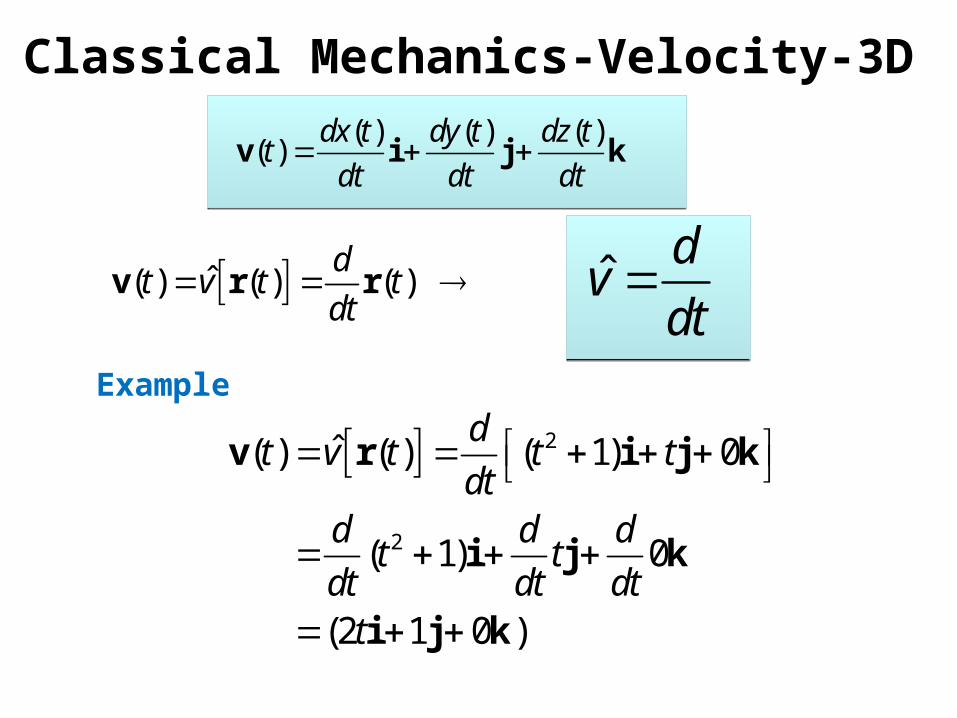
Classical Mechanics-Velocity-3D
( ) ( ) ( )( )
dx t dy t dz tt
dt dt dt v i j k
ˆd
vdt
ˆ( ) ( ) ( )d
t v t tdt
v r r
2
2
ˆ( ) ( ) ( 1) 0
( 1) 0
(2 1 0 )
dt v t t t
dtd d dt t
dt dt dtt
v r i j k
i j k
i j k
Example
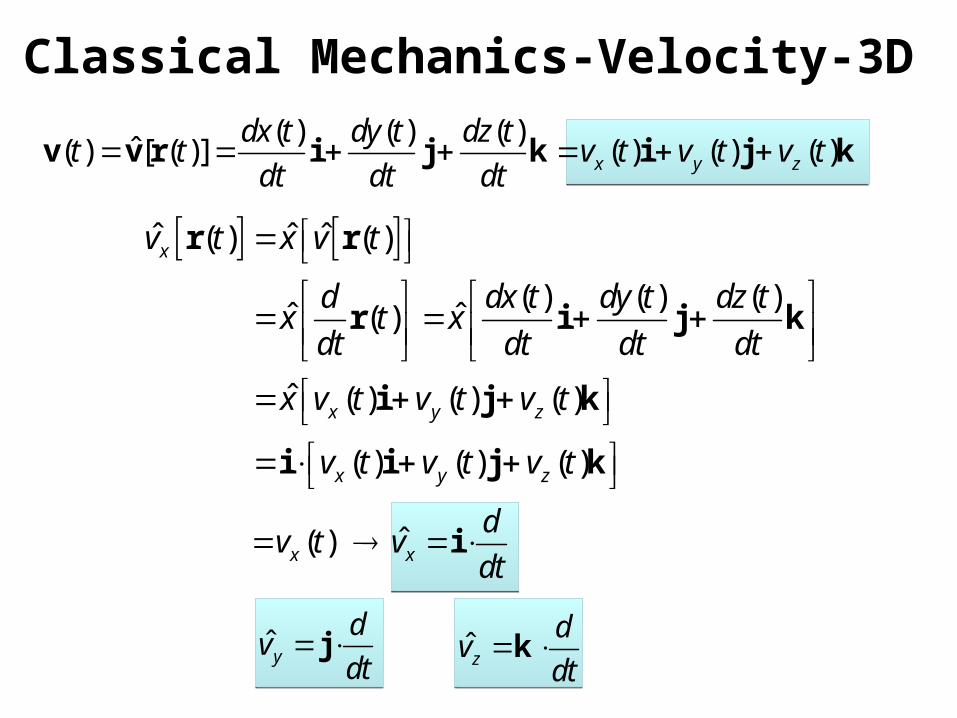
Classical Mechanics-Velocity-3D
( ) ( ) ( )ˆ( ) [ ( )] ( ) ( ) ( )x y z
dx t dy t dz tt t v t v t v t
dt dt dt v v r i j k i j k
ˆ ˆ ˆ( ) ( )
( ) ( ) ( )ˆ ˆ( )
ˆ ( ) ( ) ( )
( ) ( ) ( )
x
x y z
x y z
v t x v t
d dx t dy t dz tx t xdt dt dt dt
x v t v t v t
v t v t v t
r r
r i j k
i j k
i i j k
ˆ( )x x
dv t v
dt i
ˆyd
vdt
j ˆzd
vdt
k
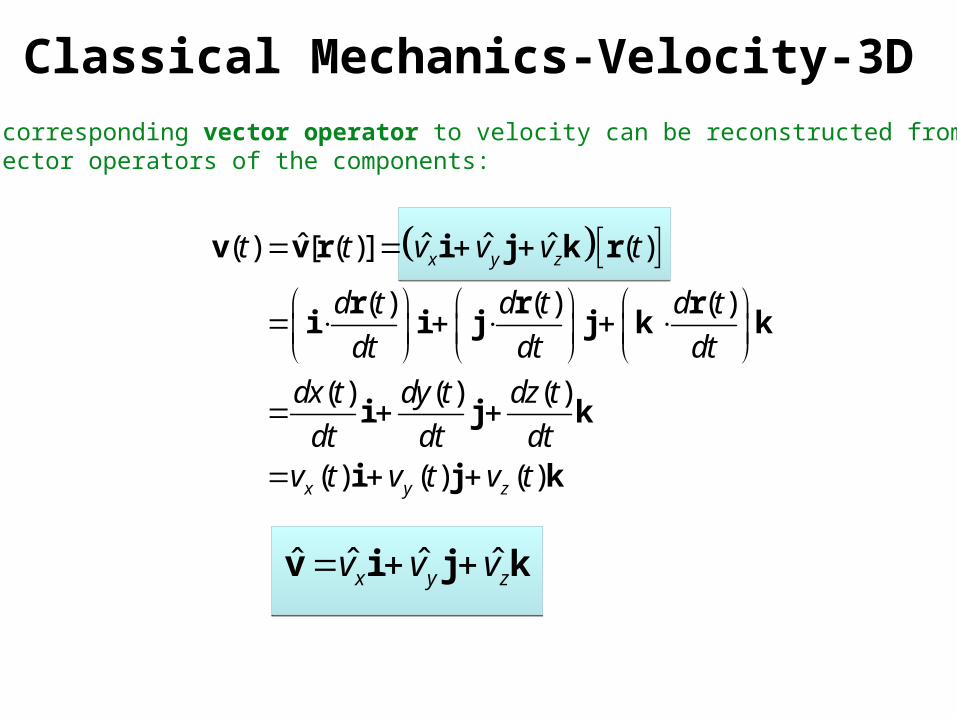
Classical Mechanics-Velocity-3D
ˆ ˆ ˆ ˆ( ) [ ( )] ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
x y z
x y z
t t v v v t
d t d t d t
dt dt dt
dx t dy t dz t
dt dt dtv t v t v t
v v r i j k r
r r ri i j j k k
i j k
i j k
ˆ ˆ ˆ ˆx y zv v v v i j k
The corresponding vector operator to velocity can be reconstructed from the projector operators of the components:
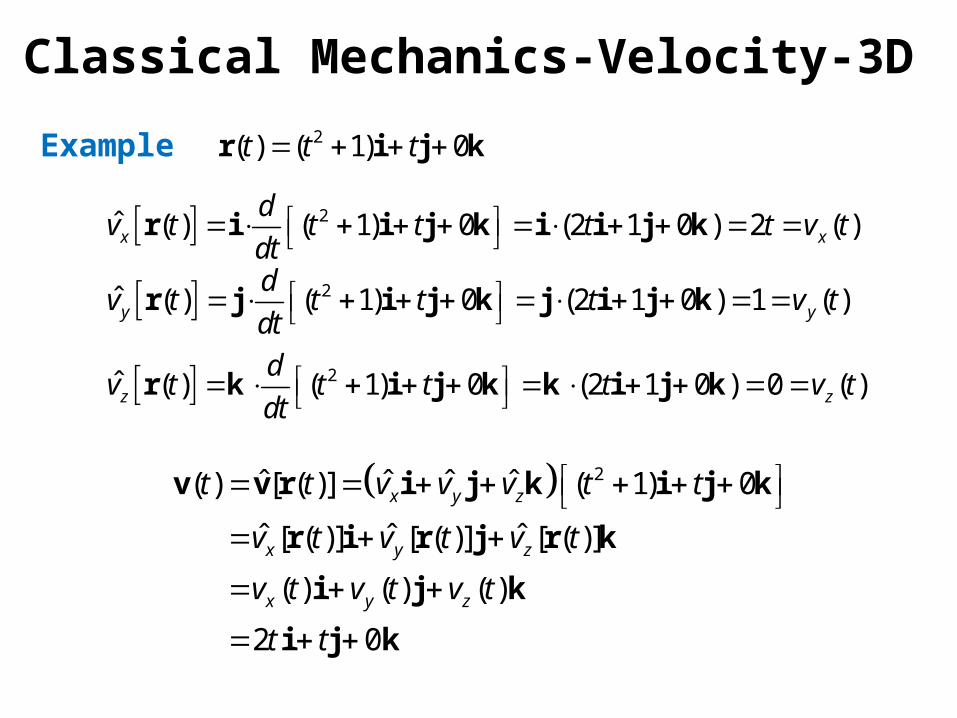
Classical Mechanics-Velocity-3D
Example
2ˆ ( ) ( 1) 0 (2 1 0 ) 2 ( )x x
dv t t t t t v t
dt r i i j k i i j k
2ˆ ( ) ( 1) 0 (2 1 0 ) 1 ( )y y
dv t t t t v t
dt r j i j k j i j k
2( ) ( 1) 0t t t r i j k
2ˆ ( ) ( 1) 0 (2 1 0 ) 0 ( )z z
dv t t t t v t
dt r k i j k k i j k
2ˆ ˆ ˆ ˆ( ) [ ( )] ( 1) 0
ˆ ˆ ˆ[ ( )] [ ( )] [ ( )]
( ) ( ) ( )
2 0
x y z
x y z
x y z
t t v v v t t
v t v t v t
v t v t v t
t t
v v r i j k i j k
r i r j r k
i j k
i j k
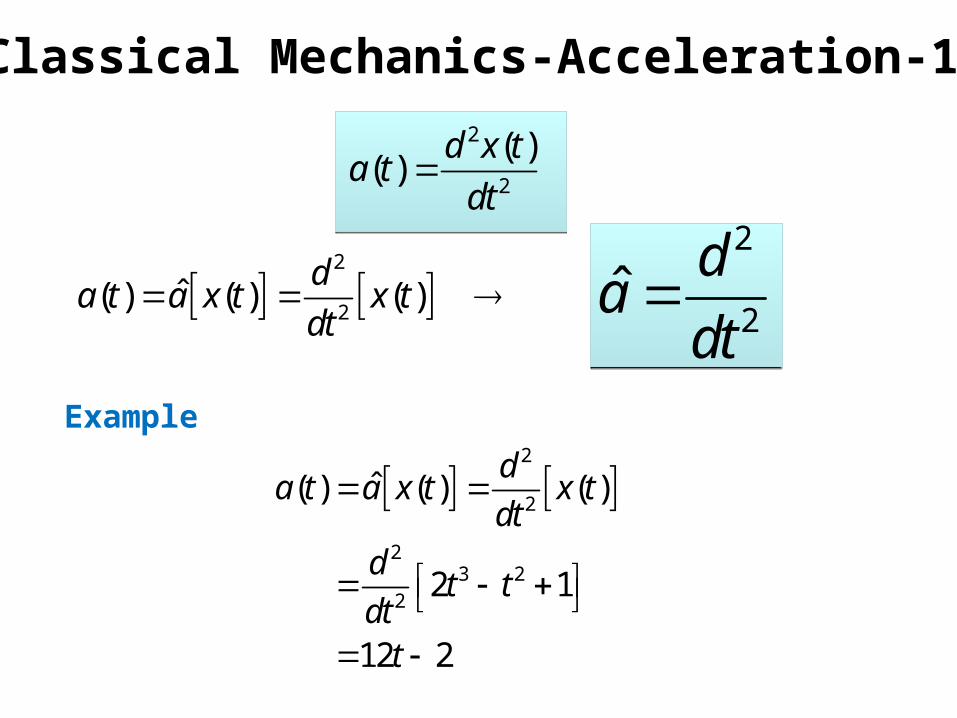
Classical Mechanics-Acceleration-1D
2
2
( )( )
d x ta t
dt
2
2ˆ
da
dt
2
2
23 2
2
ˆ( ) ( ) ( )
2 1
12 2
da t a x t x t
dt
dt t
dtt
2
2ˆ( ) ( ) ( )
da t a x t x t
dt
Example
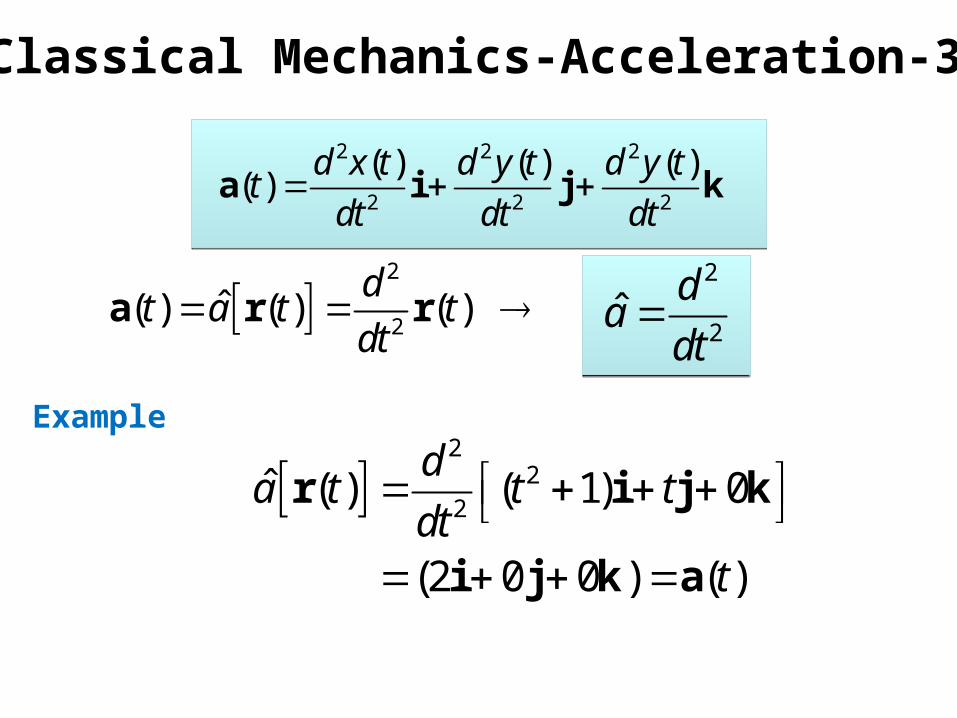
Classical Mechanics-Acceleration-3D
2 2 2
2 2 2
( ) ( ) ( )( )
d x t d y t d y tt
dt dt dt a i j k
2
2ˆ
da
dt
2
2ˆ( ) ( ) ( )
dt a t t
dt a r r
2
22
ˆ ( ) ( 1) 0
(2 0 0 ) ( )
da t t t
dtt
r i j k
i j k a
Example
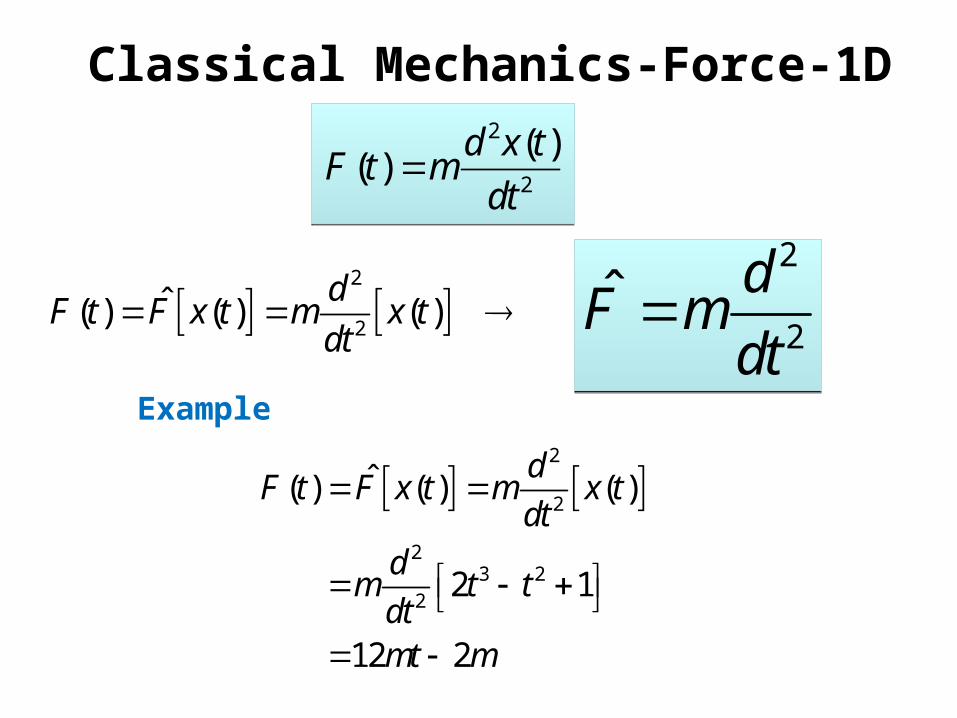
Classical Mechanics-Force-1D2
2
( )( )
d x tF t m
dt
2
2ˆ dF m
dt
2
2
23 2
2
ˆ( ) ( ) ( )
2 1
12 2
dF t F x t m x t
dt
dm t tdtmt m
2
2ˆ( ) ( ) ( )
dF t F x t m x t
dt
Example
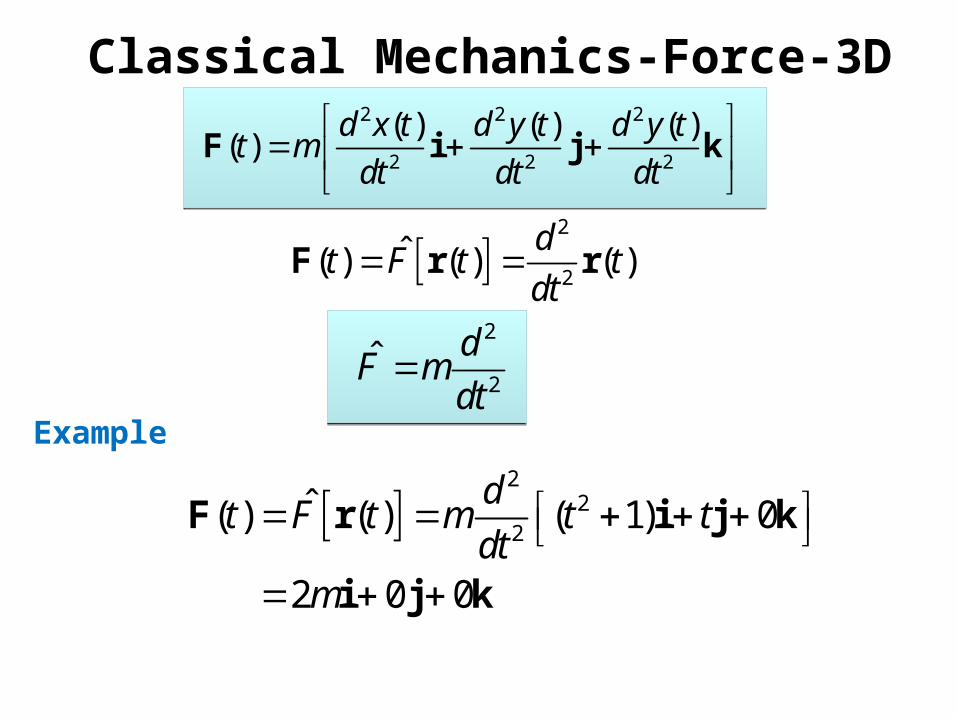
Classical Mechanics-Force-3D2 2 2
2 2 2
( ) ( ) ( )( )
d x t d y t d y tt m
dt dt dt
F i j k
2
2ˆ dF m
dt
2
2ˆ( ) ( ) ( )
dt F t t
dt F r r
2
22
ˆ( ) ( ) ( 1) 0
2 0 0
dt F t m t t
dtm
F r i j k
i j k
Example
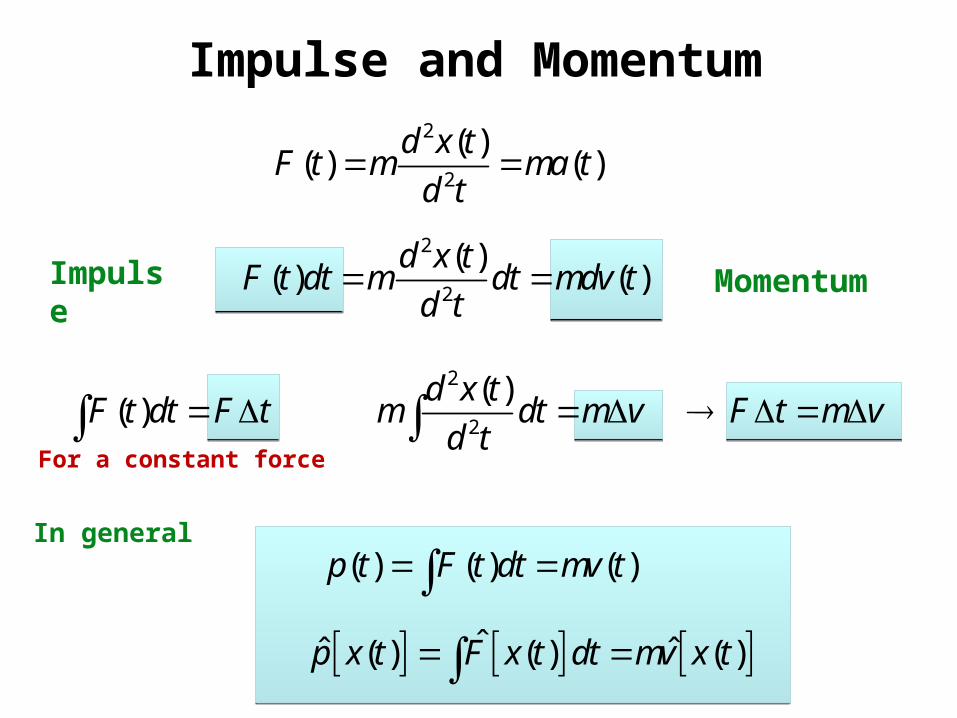
Impulse and Momentum2
2
( )( ) ( )
d x tF t m ma t
d t
ˆˆ ˆ( ) ( ) ( )p x t F x t dt mv x t
2
2
( )( ) ( )
d x tF t dt m dt mdv t
d t MomentumImpulse
2
2
( )( )
d x tF t dt F t m dt m v F t m v
d t
( ) ( ) ( )p t F t dt mv t In general
For a constant force
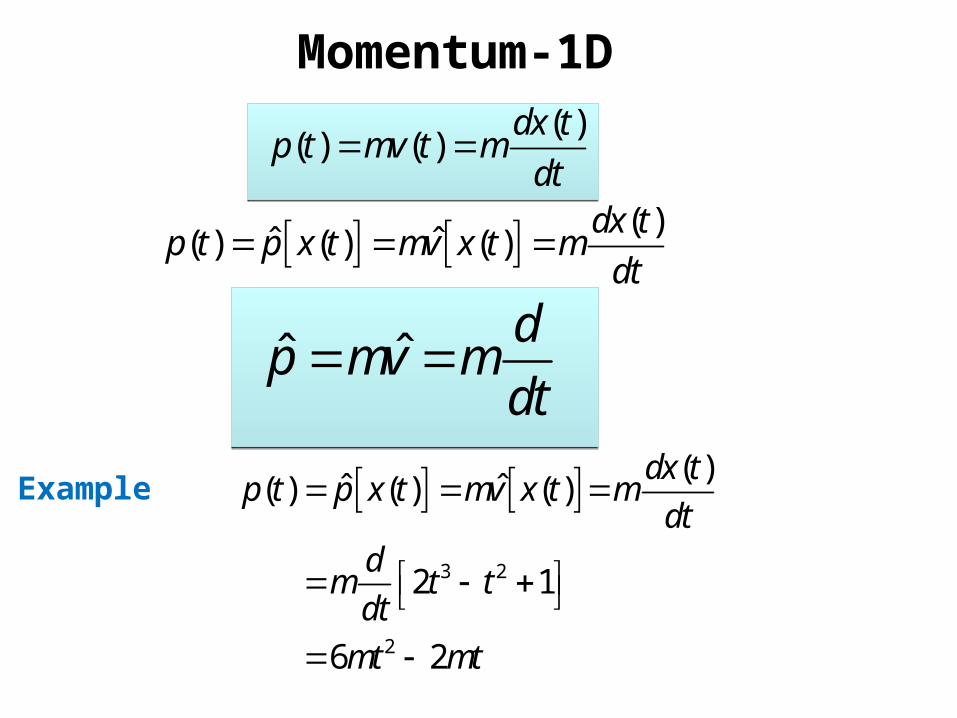
Momentum-1D( )
( ) ( )dx t
p t mv t mdt
ˆ ˆd
p mv mdt
( )ˆ ˆ( ) ( ) ( )
dx tp t p x t mv x t m
dt
3 2
2
( )ˆ ˆ( ) ( ) ( )
2 1
6 2
dx tp t p x t mv x t m
dtd
m t tdt
mt mt
Example
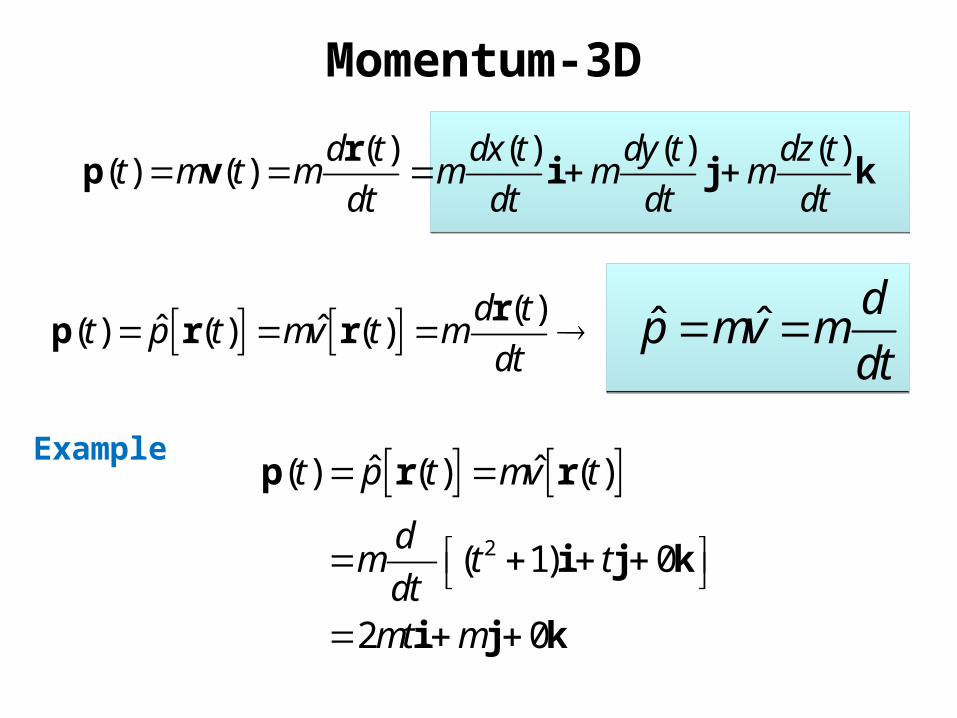
Momentum-3D
( ) ( ) ( ) ( )( ) ( )
d t dx t dy t dz tt m t m m m m
dt dt dt dt
rp v i j k
ˆ ˆd
p mv mdt
( )ˆ ˆ( ) ( ) ( )
d tt p t mv t m
dt
rp r r
2
ˆ ˆ( ) ( ) ( )
( 1) 0
2 0
t p t mv t
dm t tdtmt m
p r r
i j k
i j k
Example
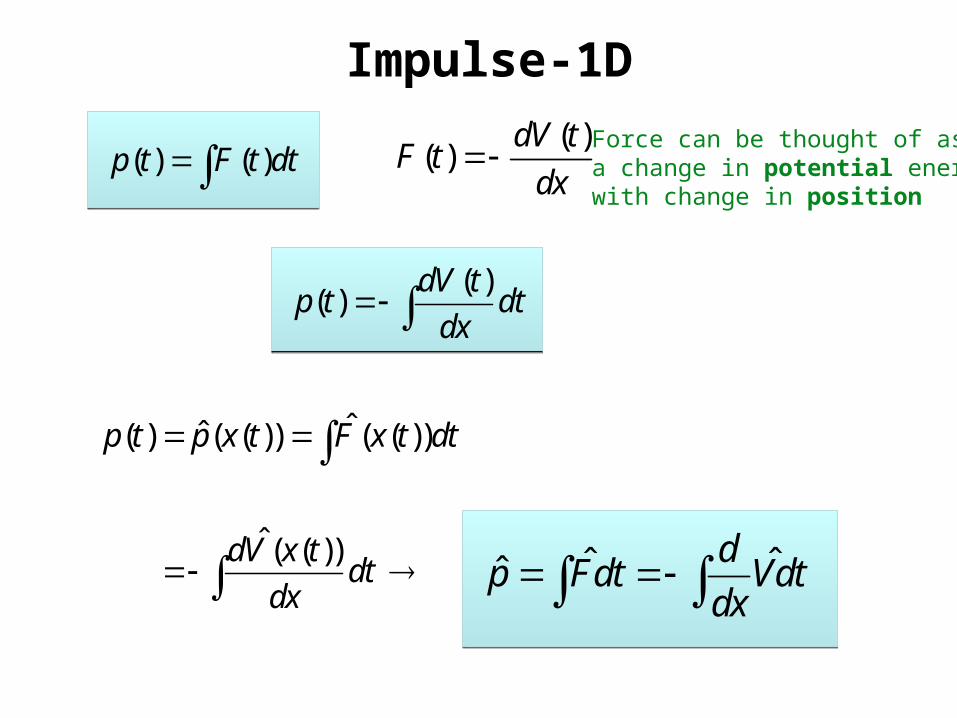
Impulse-1D
( ) ( )p t F t dt( )
( )dV t
F tdx
ˆ ˆˆd
p Fdt Vdtdx
( )( )
dV tp t dt
dx
ˆˆ( ) ( ( )) ( ( ))
ˆ( ( ))
p t p x t F x t dt
dV x tdt
dx
Force can be thought of asa change in potential energy with change in position
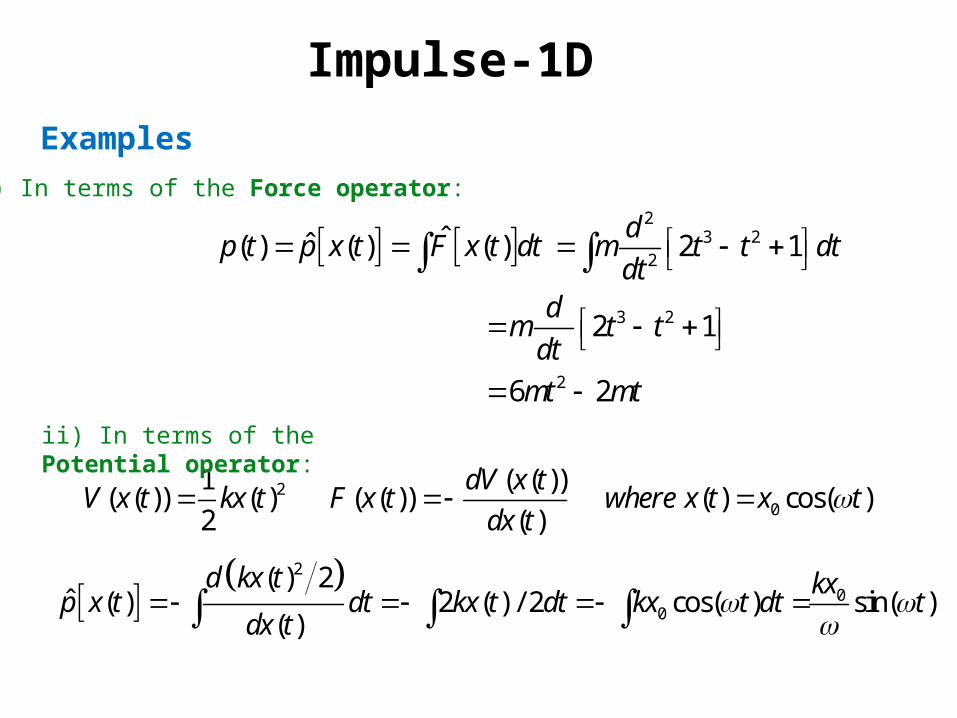
Impulse-1D
2
3 22
3 2
2
ˆˆ( ) ( ) ( ) 2 1
2 1
6 2
dp t p x t F x t dt m t t dt
dtd
m t tdt
mt mt
2
00
( ) 2ˆ ( ) 2 ( ) / 2 cos( ) sin( )
( )
d kx t kxp x t dt kx t dt kx t dt t
dx t
Examples
20
1 ( ( ))( ( )) ( ) ( ( )) ( ) cos( )
2 ( )
dV x tV x t kx t F x t where x t x t
dx t
i) In terms of the Force operator:
ii) In terms of the Potential operator:
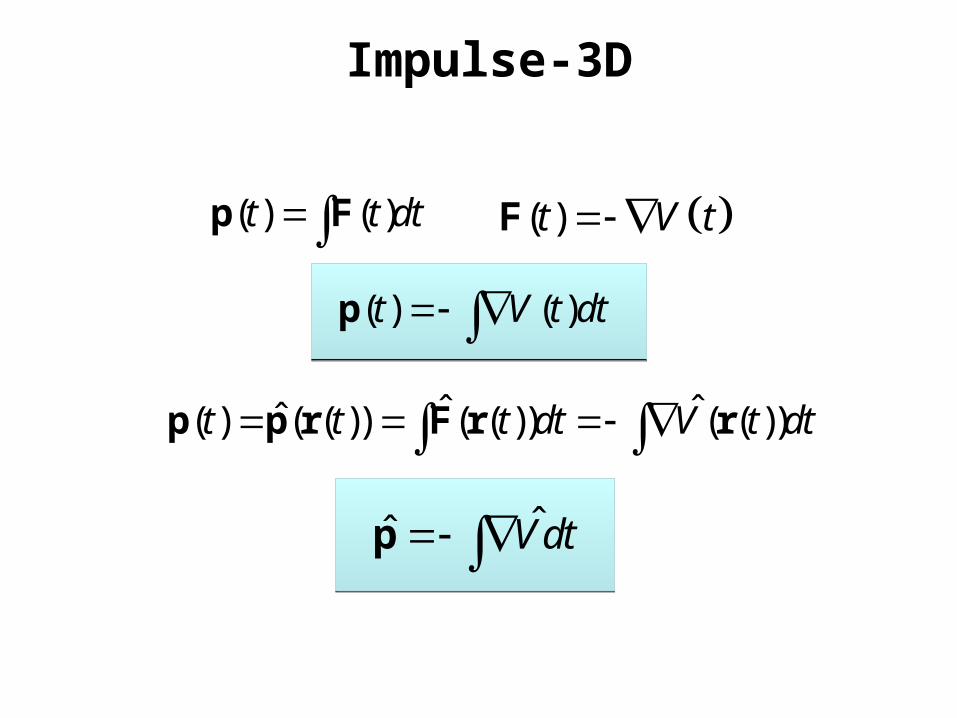
Impulse-3D
( ) ( )t t dtp F ( )t V t F
ˆˆ Vdt p
( ) ( )t V t dt p
ˆ ˆˆ( ) ( ( )) ( ( )) ( ( ))t t t dt V t dt p p r F r r
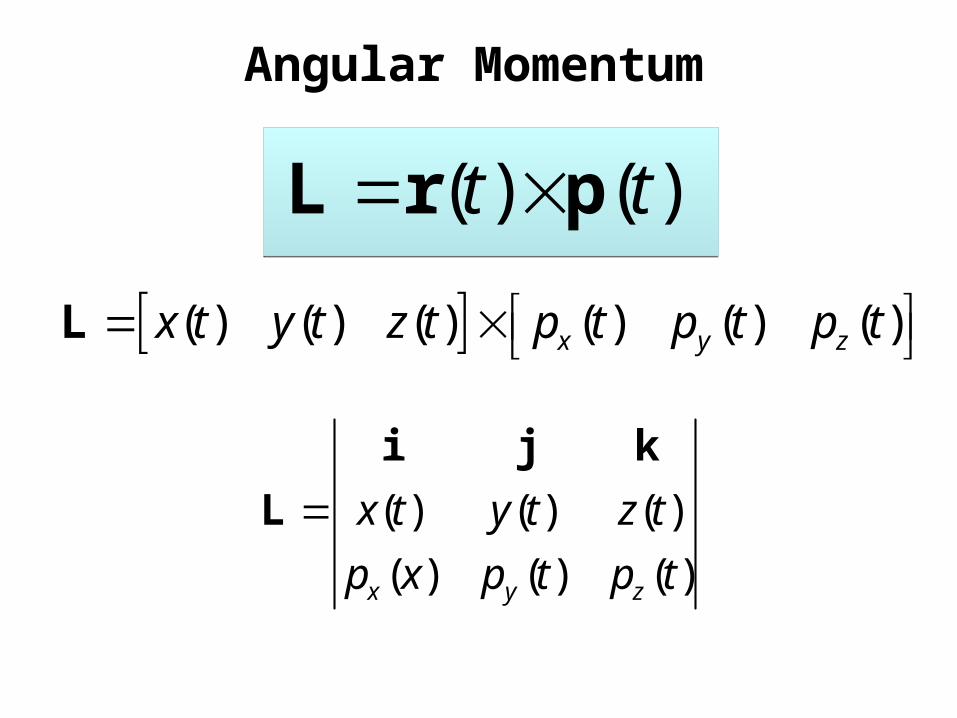
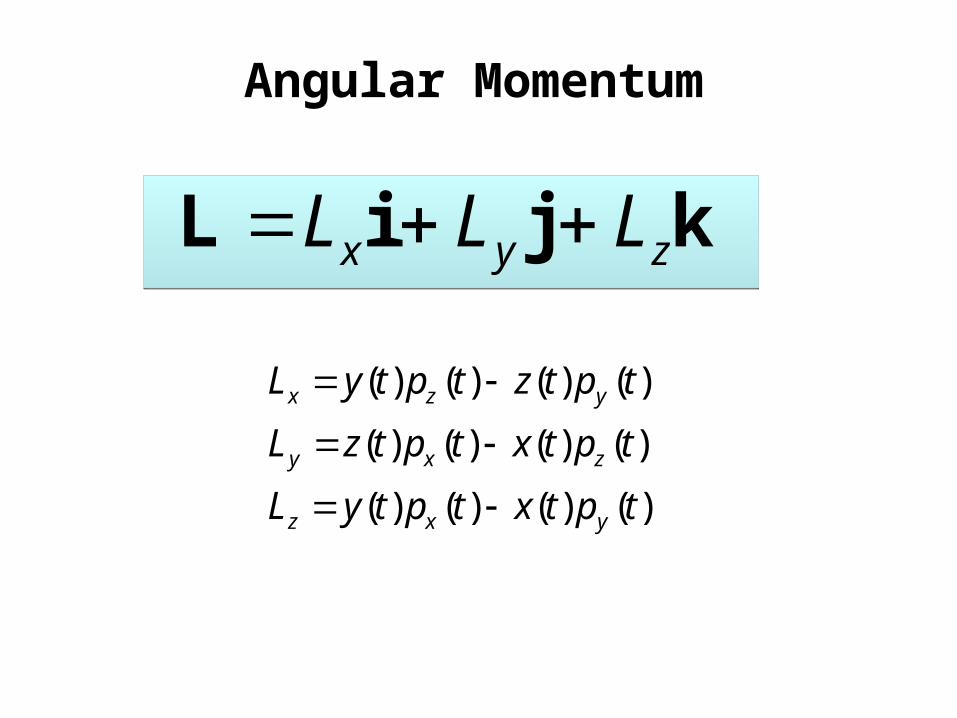
Angular Momentum
( ) ( )t t L r p
( ) ( ) ( ) ( ) ( ) ( )x y zx t y t z t p t p t p t L
( ) ( ) ( )
( ) ( ) ( )x y z
x t y t z t
p x p t p t
i j k
L
Angular Momentum
x y zL L L L i j k
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
x z y
y x z
z x y
L y t p t z t p t
L z t p t x t p t
L y t p t x t p t
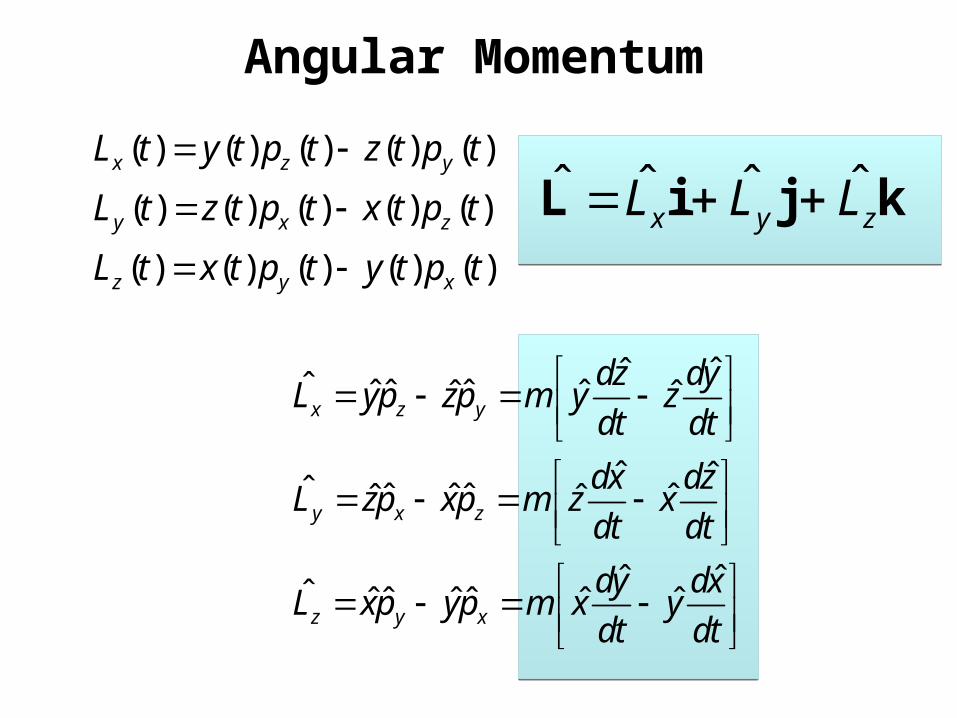
Angular Momentum
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
x z y
y x z
z y x
L t y t p t z t p t
L t z t p t x t p t
L t x t p t y t p t
ˆˆˆ ˆ ˆ ˆ ˆˆ ˆ
ˆ ˆˆ ˆ ˆˆ ˆˆ ˆ
ˆ ˆˆ ˆˆ ˆ ˆ ˆ ˆ
x z y
y x z
z y x
dz dyL yp zp m y z
dt dt
dx dzL zp xp m z x
dt dt
dy dxL xp yp m x y
dt dt
ˆ ˆ ˆ ˆx y zL L L L i j k
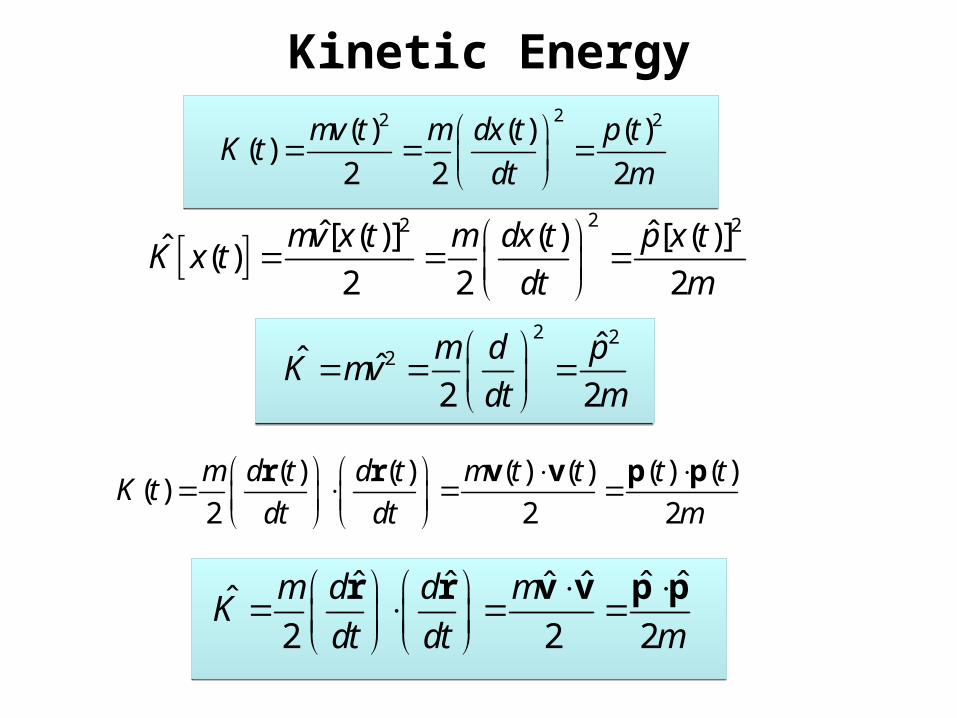
Kinetic Energy22 2( ) ( ) ( )
( )2 2 2
mv t m dx t p tK t
dt m
( ) ( ) ( ) ( ) ( ) ( )( )
2 2 2
m d t d t m t t t tK t
dt dt m
r r v v p p
2 22 ˆˆ ˆ
2 2
m d pK mv
dt m
ˆ ˆ ˆ ˆˆ ˆˆ2 2 2
m d d mK
dt dt m
r r v v p p
22 2ˆ ˆ[ ( )] ( ) [ ( )]ˆ ( )
2 2 2
mv x t m dx t p x tK x t
dt m
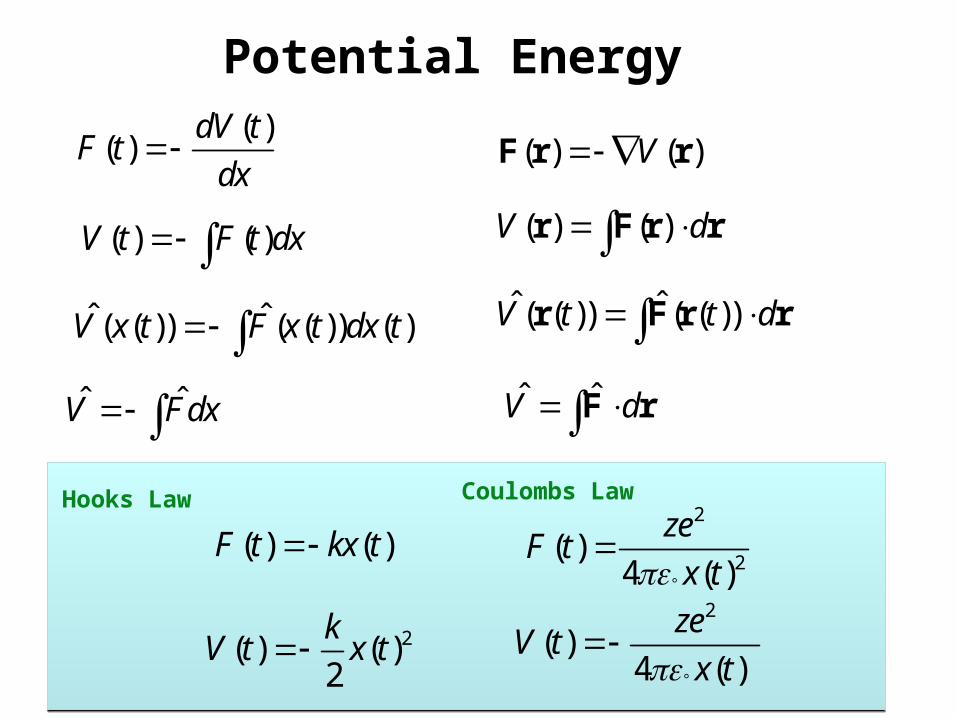
Potential Energy
( ) ( )V d r F r r( ) ( )V t F t dx
( )( )
dV tF t
dx ( ) ( )V F r r
Hooks Law
( ) ( )F t kx t
2( ) ( )2
kV t x t
Coulombs Law2
2( )
4 ( )
zeF t
x t
2
( )4 ( )
zeV t
x t
ˆ ˆ( ( )) ( ( )) ( )V x t F x t dx t ˆ ˆV Fdx
ˆ ˆ( ( )) ( ( ))V t t d r F r r
ˆ ˆV d F r
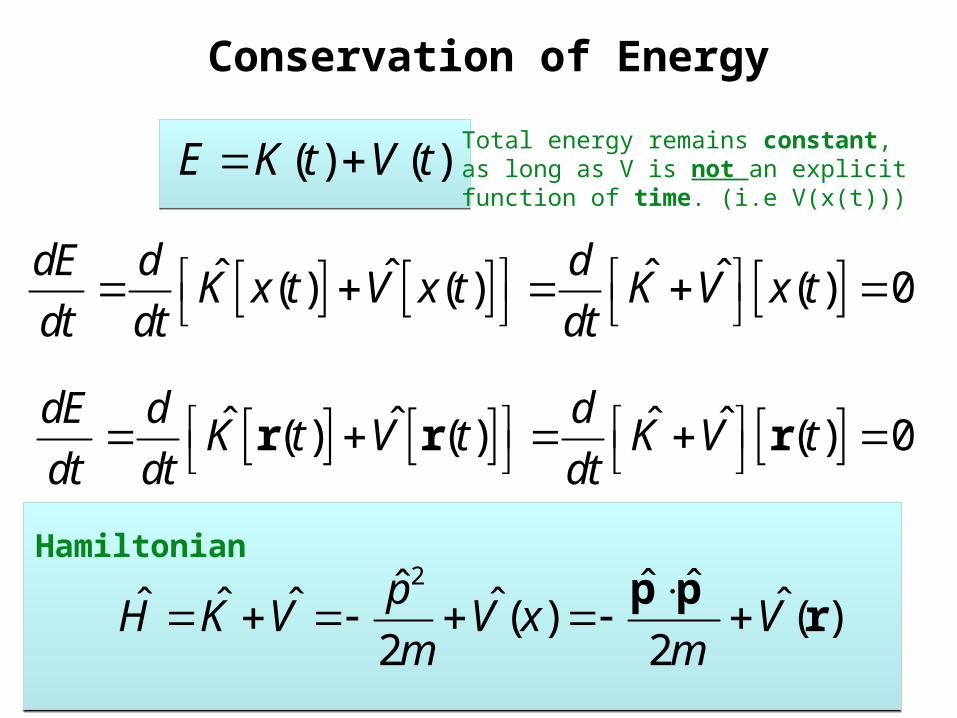
Conservation of Energy
( ) ( )E K t V t Total energy remains constant, as long as V is not an explicit function of time. (i.e V(x(t)))
ˆ ˆ ˆ ˆ( ) ( ) ( ) 0dE d d
K x t V x t K V x tdt dt dt
ˆ ˆ ˆ ˆ( ) ( ) ( ) 0dE d d
K t V t K V tdt dt dt
r r r
2 ˆ ˆˆˆ ˆ ˆ ˆ ˆ( ) ( )2 2
pH K V V x V
m m
p pr
Hamiltonian
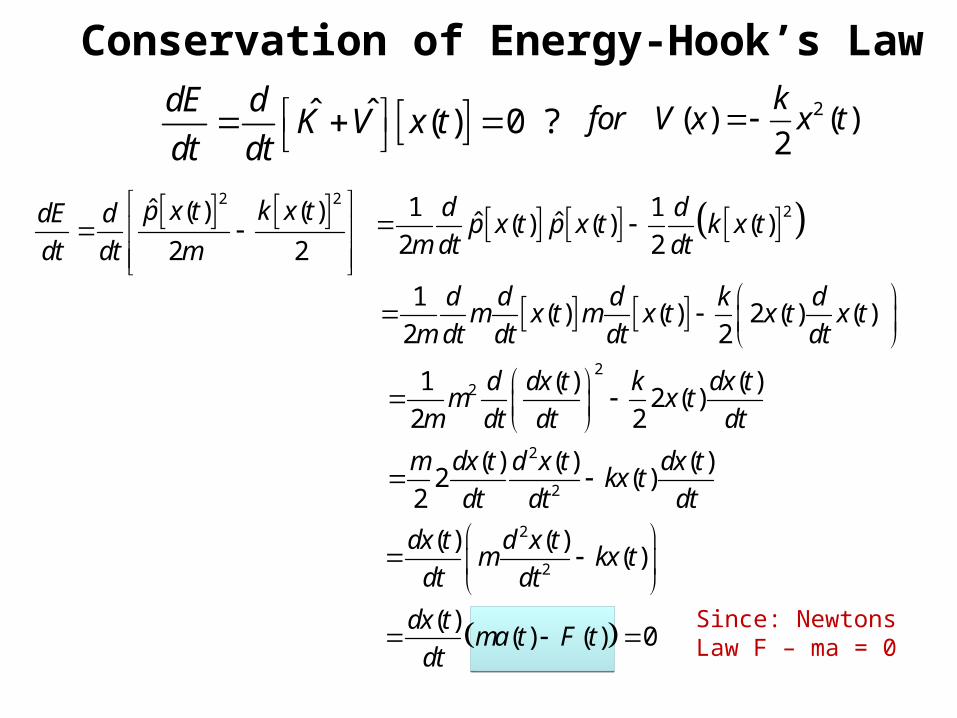
Conservation of Energy-Hook’s Law
ˆ ˆ ( ) 0 ?dE d
K V x tdt dt
2( ) ( )
2
kfor V x x t
2 2ˆ ( ) ( )
2 2
p x t k x tdE d
dt dt m
22
2
2
1 ( ) ( )2 ( )
2 2
( ) ( ) ( )2 ( )
2
d dx t k dx tm x t
m dt dt dt
m dx t d x t dx tkx t
dt dt dt
21 1ˆ ˆ( ) ( ) ( )
2 2
d dp x t p x t k x t
m dt dt
2
2
( ) ( )( )
( )( ) ( ) 0
dx t d x tm kx t
dt dt
dx tma t F t
dt
Since: Newtons Law F – ma = 0
1( ) ( ) 2 ( ) ( )
2 2
d d d k dm x t m x t x t x t
m dt dt dt dt





























