Embed Size (px)
Citation preview

Composites Science and Technology 69 (2009) 176–185
Contents lists available at ScienceDirect
Composites Science and Technology
journal homepage: www.elsevier .com/ locate /compsci tech
On the influence of membrane inertia and shear deformation on the geometricallynon-linear vibrations of open, cylindrical, laminated clamped shells
Pedro Ribeiro *
DEMEGI/IDMEC, Faculdade de Engenharia, Universidade do Porto, R. Dr. Roberto Frias, s/n, 4200-465 Porto, Portugal
a r t i c l e i n f o a b s t r a c t
Article history:Received 20 May 2008Received in revised form 16 September 2008Accepted 27 September 2008Available online 7 October 2008
Keywords:B. VibrationB. Non-linear behaviourC. Shell theoryA. LaminateC. Finite element analysis (FEA)
0266-3538/$ - see front matter � 2008 Elsevier Ltd. Adoi:10.1016/j.compscitech.2008.09.038
* Corresponding author. Tel.: +351 225081716.E-mail address: [email protected]
It is the objective of this work to verify the validity of different approximations in the analysis of geomet-rically non-linear vibrations of open, cylindrical, laminated, fully clamped shells. Namely, it is intended toverify if membrane inertia and transverse shear deformation can be neglected and when. p-version finiteelements with hierarchic basis functions are employed to define the models. A simple comparison of thedifferent stiffness and mass terms is carried out first, to assess the relative importance of membrane iner-tia and shear deformation. Then a few numerical tests are carried out in non-linear vibrations by solvingthe ordinary differential equations of motion by Newmark’s method. It is found that what are usuallyconsidered to be thin panels actually require the consideration of shear deformation.
� 2008 Elsevier Ltd. All rights reserved.
1. Introduction
Laminated composite shells provide stiff, aerodynamically effi-cient surfaces, have good corrosion and fatigue properties, and giveweight reduction in comparison to metal based structures. Thus,laminated shells encounter a wide number of applications and insome of these, e.g. in aeronautic structures, they may experiencelarge amplitude vibrations. This work is on forced, geometricallynon-linear vibrations of cylindrical, laminated, open panels andhas the purpose of verifying if approximations that are frequentlyadopted are valid. The specific interest is in:
(1) comparing thin shell theory, that neglects shear strains, withfirst-order shear deformation theory (FSDT). There are a num-ber of ‘‘rules of the thumb”, namely the 1/20 relation betweenlength and thickness, that are employed by engineers tochoose between thin or FSD shell theories, but a validationof these rules is absent in non-linear vibrations;
(2) analysing the influence of the membrane inertia in the non-linear dynamics of laminated shallow shells. In fact, althoughit is very popular to neglect membrane inertia, it is not certainthat this approximation is reasonable in shells vibrating withlarge amplitude displacements.
A literature review focused on the above aspects is carried outin Section 2. In Section 3 the models are presented. A simple com-
ll rights reserved.
parative analysis is executed in Section 4 using a model with onedegree of freedom per displacement component. Multi-degree-of-freedom models are employed in Section 5, where numerical testsare performed to compare the different models and discuss theirvalidity. The numerical tests will employ a p-version finite element[1] with hierarchic basis functions, which was first used in [2].Newmark’s method [3] will be used to solve the differential equa-tions of motion in the time domain. The thickness and the curva-ture radius will be changed in order to analyse how sheardeformation and membrane inertia affect the shells.
2. Literature review
Several theories exist for the analyses of laminated shells. Forintroductions to these theories and general reviews on shell vibra-tions, review papers [4–7] and books [8–12] may be consulted. Aliterature review focused on studies that addressed the importanceof shear deformation and membrane inertia is carried out in thenext sub-sections. We are in particular interested in open, cylindri-cal, composite laminated, shallow shells, but will include someworks on plates in this review.
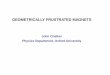
In a shallow shell (Fig. 1) the raise is small in comparison withthe spans, being generally accepted that the smallest radius of cur-vature should be lower than twice the projected length b, or morerestrictively, b/R 6 0.4 according to [13]. When the shell is shallow,Cartesian coordinates can be used and the strain displacementrelations slightly differ from the ones of plates [10]. The analysisof this paper is restricted to cylindrical open shells, and the geom-etry of a shell prior to deformation is defined from a reference

z
x
y
R
b
a
Fig. 1. Open cylindrical shell.
P. Ribeiro / Composites Science and Technology 69 (2009) 176–185 177
plane by an initial ‘‘displacement” w1 in the z direction written asw1(x,y) = �y2/(2R) where R is the principal curvature radius.
2.1. Effect of membrane inertia
This review starts with works on linear vibrations and in particu-lar with the paper by Leissa and Kadi [13], where the effect of mem-brane inertia on the linear natural frequencies of a rather thinisotropic shallow shell was analysed. Neglecting the membraneinertia caused small errors – below 1%. In [14] boundary-domain ele-ment methods were applied. The effects of neglecting the membraneand the rotary inertias on the linear natural frequencies of lowermodes of thick, very shallow shells (h/a = 0.1, a/R 6 0.1) were small.
A number of studies on non-linear vibrations followed a single-mode approach or severely reduce models. Abe et al. [15] examinedthe non-linear free vibrations of laminated shallow shells withclamped edges, considering one or two degrees of freedom. The sameauthors [16] analysed the response of simply supported, symmetriclaminated shallow shells using a model with three degrees of free-dom. Both in [15] and [16] the membrane and rotary inertias wereneglected. After a literature search, Przekop et al [17] concluded thatthe membrane inertia has been generally neglected in the analysesof large-amplitude free vibration of shallow shells or that, when itwas considered, it was in conjunction with simple one degree of free-dom models. One exception occurs in [18] where a multi-degree-of-freedom model was applied following FSDT and apparently themembrane inertia was considered; however the oscillations wereassumed to be harmonic, which is an important restriction. Przekopet al [17] applied two types of modal reduction to investigatefree vibrations of isotropic shells: one formulation does not neglectmembrane inertia and the other uses bending modes only andneglects the membrane inertia. It was concluded that the two modalformulations can predict completely different characteristics. In[19], the effect of membrane inertia on large amplitude vibrationsof a complete circular cylindrical isotropic shell was investigatedand it was shown that membrane inertia should be included tohave an accurate model in that case. In [20], it is considered that inshallow open panels the effect of membrane inertia should be lessimportant than for complete circular shells, but the membraneinertia is employed in the analysis of isotropic shells. The rotaryinertia and transverse shear strains were neglected in [19,20].
It is concluded from an overview of the literature, that mostauthors accept that the membrane inertia can be neglected in theanalyses of large amplitude vibrations of open shallow shells, but ref-erence [17] indicates that this may not be always true.
2.2. Shear deformation
The first-order shear deformation theory (FSDT) [10] has someadvantages in comparison with the classical laminate thin shell
theory. First of all, since the transverse shear deformation andthe rotary inertia are not neglected more accurate results are gen-erally achieved using FSDT. This becomes more significant in com-posite laminates, because their shear moduli are generally smallerthan the shear modulus of isotropic materials. Second, FSDT finiteelements only require C0 continuity whilst the thin shell ones re-quire C1 continuity.
In the FSDT, the displacement components in the x, y and zdirections, respectively represented by u, t and w are given by
uðx; y; z; tÞ ¼ u0ðx; y; tÞ þ zh0yðx; y; tÞ; vðx; y; z; tÞ
¼ v0ðx; y; tÞ � zh0x ðx; y; tÞ; wðx; y; z; tÞ ¼ w0ðx; y; tÞ ð1Þ
where u0, t0 and w0 are the values of u, t and w at the reference sur-face, and h0
x and h0y are the independent rotations of the normal to
the middle surface about the x and y axis.Thin shell theories follow assumptions often attributed to Love,
which can be found, for example in p. 6 of Ref. [9]. Due to its rele-vance to this work, we recall the following assumption, known asKirchhoff’s hypothesis: ‘‘normals to the undeformed middle sur-face remain straight and normal to the deformed middle surfaceand suffer no extension”. Transverse shear is hence neglected,and h0
yðx; y; tÞ ¼ �w0;xðx; y; tÞ and h0
x ðx; y; tÞ ¼ w0yðx; y; tÞ. Naturally,
the thinner the panel the more accurate Kirchhoff’s hypothesis is.The effect of shear deformation depends upon the dimensions,lamination and boundary conditions [8].
In his book [8], Chia states that ‘‘the transverse shear effect ondeflection, buckling load, and fundamental frequency of compositeplates is generally significant at the span-to-thickness ratio of 2000.In the same book it is stated that a span-to-thickness relationapproximately equal to 25 requires using theories of higher orderthan the thin one. In [21], Berger hypothesis and a one modeapproximation were adopted to analyse the large-amplitude vibra-tion of rectangular plates with span-to-thickness relation equal to10 and 20. Shear deformation and rotary inertia played a consider-able role in the large-amplitude vibration of orthotropic plates,causing an increase in the period. The effect of thickness upon thelarge amplitude vibrations of isotropic shallow shells was alsoinvestigated in [22], where membrane and rotary inertia were ne-glected arriving at a one degree of freedom model. It was found thatthin shell theory underestimates the hardening spring effect forthick shells. In [23], a third-order expansion in the thickness coor-dinate for the in-plane displacements was assumed to computethe linear natural frequencies of laminated plates. The authors con-clude that thin plate theory is accurate for plates where a/h P 40, ifan average error of 5.5% is acceptable. FSDT theory provided the10th natural frequency of plates, where a/h = 5 with a differenceof about 3% in relation to higher order theories; smaller differencesoccurred in the lower modes. A higher order theory is again used in[24]; the FSDT gives fundamental frequencies that are quite close tothe ones computed with higher order theories and with the theoryof elasticity in plates until, at least a/h = 5. Thin plate theory onlyprovided reasonably accurate fundamental frequencies for a/habove 25 (error over 5%, when a/h = 25). In a work carried out onisotropic beams and plates [25], it was found that FSDT and thintheory may predict differently the stability of the solutions. InRef. [26], linear natural frequencies are computed using both thinand FSDT models. In a fully clamped rectangular plate, where a/h = 50, the thin theory provides the first natural frequency withan error approximately equal to 2.4% and the fourth natural fre-quency with an error slightly larger than 3%. When the span tothickness ratio is 25, the errors are greater than 9%.
2.3. Shear correction coefficient
When a first order shear deformation theory is followed, shearcorrection coefficients, k, are required. There are a few studies

178 P. Ribeiro / Composites Science and Technology 69 (2009) 176–185
[27–29], where more or less elaborate procedures are suggested inorder to define the shear correction coefficients. However, the com-parison between different approaches provided in Ref. [29] showsthat, in most situations, the classical shear correction factor k = 5/6provides results that are rather accurate and which are not worsethan the ones obtained with the more onerous procedures tested.In fact, in numerical tests carried out in a quite thick laminated cylin-drical shell – thickness to radius relation of 0.3 – the first order sheardeformation theory with k = 5/6 provided the first seven natural fre-quencies with relative errors between +0.9% and –3.68%; the errorswere lower in thinner plates and shells. This issue was also ad-dressed in Chapter 2 of Ref. [30], where it was shown that with FSDTand k = 5/6 fairly accurate transverse shear stresses of moderatelythick (h/a 6 0.1) laminated plates are computed. In the present workthe relation between the thickness and the projected length is equalor lower than 0.1; hence the shear correction factor k = 5/6 isdeemed to be appropriate and will be used.
2.4. Conclusion of literature review
The published literature indicates that first-order-shear defor-mation theory becomes necessary in shells where the span tothickness ratio is below 40 or 50. But this conclusion uses a fewstudies where only static problems are addressed, some studiesbased on plates instead of shells, a number of studies on linearvibrations and some researches where severely reduced modelswere employed and membrane inertia neglected.
Although there are a large number of publications on vibrationsof laminated shallow shells, the importance of the membrane iner-tia on these vibrations is still unclear, particularly in the non-linearregime. To investigate this, a multi-degree-of-freedom model iscertainly more appropriate than one degree-of-freedom modelsand a method to solve the equations of motion that does not re-strain the type of solution has obvious advantages.
To answer the latter requests, the principle of the virtual workand the p-version finite element method will be employed in thenext section to obtain a multi-degree-of-freedom model repre-sented by ordinary differential equations of motion. These equa-tions will be solved by direct numeric integration in Section 5.
3. Formulations
P-version finite elements are here employed. If FSDT is fol-lowed, then in each element, the middle plane displacements aregiven by
u0ðn;g; tÞv0ðn;g; tÞw0ðn;g; tÞhxðn;g; tÞhyðn;g; tÞ
8>>>>><>>>>>:
9>>>>>=>>>>>;¼
Nuðn;gÞT 0 0 0 00 Nuðn;gÞT 0 0 00 0 Nwðn;gÞT 0 00 0 0 Nhy ðn;gÞT 00 0 0 0 Nhx ðn;gÞT
26666664
37777775
quðtÞqvðtÞqwðtÞqhyðtÞ
qhxðtÞ
8>>>>><>>>>>:
9>>>>>=>>>>>;
ð2Þ
M11u 0 0 0 0
0 M22v 0 0 0
0 0 M33w 0 0
0 0 0 M44Rx 0
0 0 0 0 M55Ry
266666664
377777775
€quðtÞ€qvðtÞ€qwðtÞ€qhx ðtÞ€qhy ðtÞ
8>>>>>><>>>>>>:
9>>>>>>=>>>>>>;þ
K11Luu K12
Luv K13Lus
K21Lvu K22
Lvv K23Lvs
K31Lsu K32
Lsv K33Lss þ K33
Lc
0 0 K43Lc
0 0 K53Lc
2666666664
þ
0 0 KNLðqwðtÞÞ132
0 0 KNLðqwðtÞÞ232
2KNLðqwðtÞÞ13T2 2KNLðqwðtÞÞ
23T2 KNLðqwðtÞÞ
334 þ KNLðqwðtÞÞ
332s þ 2
0 0 00 0 0
266666664
The letters n and g represent local coordinates; Ni(n,g) are vectorsof shape functions and qi(t) are vectors of generalized displacements(i = u, t, w, hx and hy). Unlike in the classical h-version of the FEM, inthe p-version the mesh is kept unchanged and the discretization er-ror is reduced by increasing the number of shape functions. It hasbeen proven by analysing the error and demonstrated in severalnumerical examples that the p-version of the FEM generally con-verges faster than the h-version [1,30,31]. The basis functions cho-sen in this work are the ones previously employed in[25,26,30,31]; Ref. [31] may be consulted for more details on thesefunctions. The set of basis functions is hierarchic because the finiteelement space Sp�1, spanned by polynomial basis functions with de-gree up to p�1, is completely embedded into the space Sp, spannedby basis functions up to degree p.
In finite elements of thin shell theory a relation similar to (2)takes place, but only the displacement components u, t and wappear.
To obtain the shallow shell strain displacement relations ofFSDT, we may add the Von Kármán terms [8] to the linear straindisplacement relations derived, for example, in Ref. [10]; the out-come is the following:
ex
ey
cxy
8><>:
9>=>; ¼
1 0 0 �z 0 00 1 0 0 �z 00 0 1 0 0 �z
264
375 em
0 þ ei þ enl
eb0
( ) !ð3Þ
em0 ¼
u0;x
v0;y
u0;y þ v0
;x
8><>:
9>=>;ei ¼
0w0
R
0
8><>:
9>=>;eb
0 ¼�h0
y;x
h0x;y
�h0y;y þ h0
x;x
8>><>>:
9>>=>>;enl ¼
ðw0;xÞ
2=2
ðw0;yÞ
2=2
w0;xw0
;y
8>><>>:
9>>=>>; ð4Þ
where ex, ey represent the membrane strain components in the xand y directions and cxy the membrane shear strain. R representsthe principal radius of curvature. Partial derivation is representedby a comma. In Eqs. (3) and (4) function arguments are not ex-pressed in order to simplify the notation (e.g. u0
;x is actuallyu0;xðx; y; tÞ); this simplified notation is often used in this text.
The following linear strain displacement relation is employedfor the transverse shear strains in the FSDT model
czx
cyz
( )¼
w0;x þ hy
w0;y � hx
( )ð5Þ
The stress–strain relations are obtained from the relations of anorthotropic lamina, which may be found in [8,10,11]. Defining thevirtual work of the inertia, internal and external forces and apply-ing the principle of the virtual work, the equations of motion areobtained. For moderately thick shells, these equations are of thefollowing form:
0 0
0 0
K34Lc K35
Lc
K44Lb þ K44
Lc K45Lb þ K45
Lc
K54Lb þ K54
Lc K55Lb þ K55
Lc
3777777775
quðtÞqvðtÞqwðtÞqhxðtÞ
qhyðtÞ
8>>>>>><>>>>>>:
9>>>>>>=>>>>>>;
0 0
0 0
KNLðqwðtÞÞ33T2s 0 0
0 00 0
377777775
quðtÞqvðtÞqwðtÞqhxðtÞ
qhyðtÞ
8>>>>>><>>>>>>:
9>>>>>>=>>>>>>;¼
PuðtÞPvðtÞPwðtÞMhx ðtÞMhy ðtÞ
8>>>>>><>>>>>>:
9>>>>>>=>>>>>>;
ð6Þ

P. Ribeiro / Composites Science and Technology 69 (2009) 176–185 179
Matrices Miik (where i = 1–5 and k = u, t, w, Rx and Ry) are mass
matrices and matrices KijLk are stiffness matrices, all constant.
Matrices of type KNLðqwðtÞÞi3k , where i can be 1, 2 or 3, and k = 2,
2s, depend linearly on the transverse generalized coordinatesqw(t) and matrix KNLðqwðtÞÞ
334 depends quadratically on these coor-
dinates; therefore the equations of motion have quadratic and cu-bic non-linear terms. The vector on the right hand side of Eq. (6) isthe vector of generalized external forces, which is explicitly depen-dent on time. These matrices and vectors are equal to the ones em-ployed in [2].
The second model of interest in this work is obtained from Eq.(6) by neglecting the membrane inertia, thus condensing the equa-tions of motion. This approximation is justified by the argumentthat the membrane accelerations are generally smaller than thetransverse ones and that membrane inertia forces are less impor-tant than membrane elastic forces. This approach is commonlydesignated as mass condensation and has been used in linear prob-lems at least since 1965 [32,33]. In this case, the generalised mem-brane displacements are computed from
quðtÞqvðtÞ
� �¼ �
K11Luu K12
Luv
k21Lvu K22
Lvv
" #�1k13
Lus
K23Lvs
" #þ
K13NL2ðqwðtÞÞ
K23NL2ðqwðtÞÞ
" # !qwðtÞ
þK11
Luu K12Luv
K21Lvu K22
Lvv
" #�1PuðtÞPvðtÞ
� �
ð7Þ
and the reduced set of equations of motion is obtained from (6)(function arguments totally dropped):
M33w 0 0
0 M44Rx 0
0 0 M55Rx
264
375
€qw
€qhx
€qhy
8><>:
9>=>;þ
K33Lss þK33
Lc K34Lc K35
Lc
K43Lc K44
Lb þK44Lc K45
Lb þK45Lc
K53Lc K54
Lb þK54Lc K55
Lb þK55Lc
2664
3775
qw
qhx
qhy
8><>:
9>=>;þ
K33NL4 þK33
NL2s þ 2K33TNL2s 0 0
0 0 00 0 0
264
375
qw
qhx
qhy
8><>:
9>=>;
�K31
Lsu K32Lsv
� � K11Luu K12
Luv
K21Lvu K22
Lvv
" #�1K13
Lus
K23Lvs
" #qw
00
8>>>><>>>>:
9>>>>=>>>>;�
K31Lsu K32
Lsv
� � K11Luu K12
Luv
K21Lvu K22
Lvv
" #�1K13
NL2
K23NL2
" #qw
00
8>>>><>>>>:
9>>>>=>>>>;�
2 K13T
NL3 K23T
NL3
h i K11Luu K12
Luv
K21Lvu K22
Lvv
" #�1K13
Lus
K23Lvs
" #qw
00
8>>>><>>>>:
9>>>>=>>>>;
�2 K13T
NL3 K23T
NL3
h i K11Luu K12
Luv
K21Lvu K22
Lvv
" #�1K13
NL2
K23NL2
" #qw
00
8>>>><>>>>:
9>>>>=>>>>;¼
Pw
Mhx
Mhy
8><>:
9>=>;�
K31Lsu K32
Lsv
� � K11Luu K12
Luv
K21Lvu K22
Lvv
" #�1Pu
Pv
� �
00
8>>>><>>>>:
9>>>>=>>>>;
�2 K13T
NL3 K23T
NL3
h i K11Luu K12
Luv
K21Lvu K22
Lvv
" #�1K13
Lus
K23Lvs
" #Pu
Pv
� �
00
8>>>><>>>>:
9>>>>=>>>>;
ð8Þ
Another model here employed is based on classical, thin shallowshell theory. In this case, the shear stresses are neglected and theequations of motion only contain as unknowns the generalizedmembrane and transverse displacements; they are of the form:
M11u 0 0
0 M22v 0
0 0 M33w
2664
3775
€qu
€qv
€qw
8><>:
9>=>;þ
K11Luu K12
Luv K13Lus
K21Lvu K22
Lvv K23Lvs
K31Lsu K32
Lsv K33Lss þ K33
Lb
2664
3775
qu
qv
qw
8><>:
9>=>;
þ0 0 K13
NL2
0 0 K23NL2
2K13TNL2 2K23T
NL2 K33NL4 þ K33
NL2S þ 2K33TNL2S
2664
3775
qu
qv
qw
8><>:
9>=>; ¼
PuðtÞPvðtÞPwðtÞ
8><>:
9>=>;ð9Þ
If the membrane inertia is neglected the generalised membrane dis-placements are again given by Eq. (7); the ensuing condensed equa-tions of motion of the thin shell model are
M33w
h i€qwf g þ ½K33
Lss þ K33Lb � qwf g þ ½K33
NL4 þ K33NL2S þ 2K33T
NL2S�fqwg
� K31Lsu K32
Lsv
� � K11Luu K12
Luv
K21Lvu K22
Lvv
" #�1K13
Lus
K23Lvs
" #þ K13
NL2 ðqwÞK23
NL2 ðqwÞ
" # !qw
� 2 K13T
NL2 K23T
NL2
h i K11Luu K12
Luv
K21Lvu K22
vv
" #�1K13
Lus
K23Lvs
" #þ K13
NL2 ðqwÞK23
NL2 ðqwÞ
" # !qw
¼ fPwg � K31Lsu K32
Lsv
� � K11Luu K12
Luv
K21Lvu K22
Lvv
" #�1Pu
Pv
� �
� 2 K13TNL2 K23T
NL2
� � K11Luu K12
Luv
K21Lvu K22
Lvv
" #�1Psu
Pv
� �
ð10Þ
4. Comparative analysis with a reduced model
To have a first idea about the relative weight of each mass andstiffness term, a model with one degree of freedom per eachdisplacement or rotation component will be used in this sec-tion. The panel considered is a [0�/45�/–45�/90�]s shell, withquadrangular planform (a = b = 0.25 m) and all boundariesclamped and immovable, that is: u0(–a/2,y, t) = u0(a/2,y, t) = u0(x,–b/2, t) = u0(x,b/2, t) = 0, hx(–a/2,y, t) = hx (a/2,y, t) = hx(x,–b/2, t) =hx(x,b/2, t) = 0. Similar conditions hold for t0(x,y, t) and hy(x,y, t).
The material properties here employed are the ones given in [34]for a graphite-epoxy lamina: E1 = 155 GPa, E2 = 8.1 GPa, G12 =4.6 GPa, q = 1550 kg m�3, t12 = 0.22. It is assumed that G13 =G23 = kG12, where k is the shear correction factor; as explained inSection 2.3 the value 5/6 is used. These properties and boundaryconditions are the ones of all tests carried out in this paper.
In these conditions the mass matrix is
M ¼ qha2
4225 0 0 0 00 4
225 0 0 00 0 4
99225 0 0
0 0 0 1675 h2 0
0 0 0 0 1675 h2
266666664
377777775
ð11Þ

180 P. Ribeiro / Composites Science and Technology 69 (2009) 176–185
In a crude comparison – we are comparing terms with differ-ent units, displacements and rotations – it is apparent that themembrane mass is larger then all the others (except for an ab-surdly large thickness, where the value of rotary inertia termswould be larger than the values of the membrane terms). Ifthe thickness is below a certain value (in this particular case0.165 m) the rotary inertia terms have, as expected, the lowermagnitudes.
In the same conditions, the linear stiffness matrix becomes
KL ¼ h
0:154� 1011 0 0 0 00 0:154� 1011 0 0 0
0 00:448� 107k
þ 0:258�107 a2
R2
0 0
0 0 00:820� 108ka2
þ0:189� 1010h2 �0:204� 109h2
0 0 0 �0:204� 109h2 0:820� 108ka2
þ0:664� 109h2
2666666666666664
3777777777777775
ð12Þ
The membrane stiffness terms are about four orders of magni-tude larger than the transverse ones, agreeing with the well knownfact that the membrane stiffness is larger than the transverse. Thestiffness terms that multiply by the rotations also have smaller val-ues than the membrane terms, although this comparison is biasedbecause the units of these terms differ.
KNLðqwðtÞÞ132 and KNLðqwðtÞÞ
232 are null matrices in this simplified
model. Hence, only one matrix depends linearly on the unknowntransverse displacements and this matrix is given by
KNLðqwðtÞÞ332s ¼ 128000
hqwðtÞR
� �ð13Þ
The non-linear matrix that depends quadratically on the trans-verse displacements is
KNLðqwðtÞÞ334 ¼ 48000
hq2wðtÞa2
" #ð14Þ
By multiplying the inverse of the mass matrix by the completestiffness matrix (i.e., including the non-linear terms) we obtain:
M�1K ¼ 1q�
0:866� 1012 1a2 0 0 0 0
0 0:866� 1012 1a2 0 0 0
0 01:111�1011k
a2 þ 6:400�1010
R2 þ
3:1752� 109 qwðtÞRa2 þ 1:19070� 109 q2
wðtÞa2
24
35 0 0
0 0 05:535� 1010k 1
h2þ
þ1:2758� 1012 1a2
" #�0:138� 1012 1
a2
0 0 0 �0:138� 1012 1a2
5:535� 1010k 1h2þ
þ4:482� 1011 1a2
" #
26666666666666666664
37777777777777777775
ð15Þ
The first line of the above matrix corresponds to the displace-ment component in the x direction, and the following lines to, inthis order, displacement components in the y direction, in the zdirection, rotation about the x axis and rotation about the y axis.Obviously, the heavier the material (higher density, q), the moreimportant the inertia of all displacement components is. MatrixM�1K also confirms that the larger the shell the more importantwill be the inertia in comparison with stiffness (not surprising,
since a larger shell is more flexible and heavier). It is confirmedthat the ratio (membrane stiffness)/(membrane inertia) is largerthan the ratio (bending stiffness/transverse inertia) even in geo-metrically non-linear vibrations (term qw(t) cannot be extremelylarge). This provides a primary justification to neglecting mem-brane inertia.
Expression M�1K shows that as the shell becomes flatter, one ofthe inertia terms of the transverse displacement component be-comes more important in comparison with the stiffness, which isdue to the obvious fact that the stiffness of this term – which isdue to curvature – tends to zero as the shell approaches a plate.Still regarding the transverse displacement, as the vibration ampli-tude increases, the mass terms loose some influence in comparisonwith the stiffness, due to the non-linear terms in the latter. Sincethe non-linear terms are common to the thin and FSD theories,the difference between the two theories may diminish as theamplitude of vibration increases.
The rotary inertia becomes more important as the thickness hincreases. With the exception of the shear terms, which are identi-fied by the presence of k, the relations between the stiffness andinertia do not depend upon the thickness of the panel. Hence, a lar-ger thickness should not turn membrane inertia more important inlaminated shells.
The analysis in this section employs a severely restricted model,with only one degree of freedom per displacement component.Moreover, inertia is connected with acceleration and the elasticforces involve the displacements and, therefore, an inspection ofmatrix terms alone may lead to erroneous conclusions. The numer-ical tests carried out in the following section intend to shed a bet-ter light on the importance of membrane inertia and sheardeformation in geometrically non-linear vibrations of fullyclamped laminated panels.
5. Numerical tests and discussion
The models here employed were partially validated by compar-ing their results with the linear natural frequencies and non-lineartransient vibrations obtained elsewhere (including [35–37]).Numerical investigations are now carried out on the fully clamped[0/45�/�45�/90�]s shell of Section 4. The excitation is alwaysharmonic and at the first linear natural frequency; the initial con-
ditions are zero displacement and zero velocity. Stiffness propor-tional damping is assumed and the proportionality dampingparameter is defined as a = 0.01/xl1, where 0.01 is the value em-ployed for a non-dimensional damping coefficient in Ref. [16].The results will be presented in non-dimensional plots, whichactually hide part of the difference between the diverse models,but the values of the linear natural frequencies in rad/s are givenin Appendix A.

P. Ribeiro / Composites Science and Technology 69 (2009) 176–185 181
Errors of about 10% were predicted in [38] if FSDT is employedin the place of higher order theories to analyse a/h = 10 shells withquite low transverse shear modulus. However, several compari-sons with higher order theories or with the theory of elasticity, car-ried out by other authors, suggest that the FSDT provides goodestimates for the natural frequencies and displacements untila/h = 10 or even lower relations, as a/h = 5 (for example[23,24,28,29]). We consider here that the FSDT model with mem-brane inertia provides truthful results until, at least, relationsbetween span and thickness equal to 10, and this model will beused as reference in the following analyses.
In tests carried out in the frame of this work on shells wherea/h = 10, and with various curvature radius, the influence of themembrane inertia on the displacements was very small. It wasslightly important in the definition of velocities when morepronounced non-linear behaviour occurred. The data computedfollowing thin shell theory differed significantly from the FSDT,as expected when a/h = 10. It must be clear that the numerical testson these very thick shells intended to verify the importance of themembrane inertia in the response. Because large displacementamplitudes occur, quite probably a model that takes plasticityand/or damage into account would be required [39].
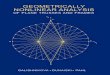
Fig. 2 shows time histories and projections of the trajectories ina phase plane (defined by the transverse displacement, w, and thetransverse velocity, _w) of a point on a panel where the length tothickness ratio is a/h = 20 and b/R = 0.4. The external force is
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
139 139.2 139.4 139.6 139.8 140
a w/h
2t
πω
Fig. 2. (a) Time histories and (b) phase plots of response at the middle point of shell a/hFSDT without membrane inertia (d); thin shell theory with membrane inertia (h) and
-0.04
-0.02
0
0.02
0.04
0.06
180 180.2 180.4 180.6 180.8 181 -0
a bw/h
2t
ωπ
Fig. 3. (a) Time histories and (b) phase plots at the middle point of shell a/h = 50, b/R = 0.4inertia (d); thin shell theory with membrane inertia (h) and without membrane inertia
applied in the vertical direction and is equally distributed overthe shell. We see that the difference in the computed displace-ments with and without membrane inertia are very small. Datacomputed following thin shell theory is quite different from dataobtained using FSDT. In tests carried out on an a/h = 20 and b/R = 0.2 shell (not shown here), a visible difference between thinand FSDT results was again found. In addition, one should bear inmind that the natural frequencies of the a/h = 20 shells computedwith thin and FSDT theories differ significantly (Appendix A).
By reducing the thickness to a/h = 50 and imposing an externalforce with amplitude 104 N m�2 to shell b/R = 0.4, the time histo-ries and phase plots shown in Fig. 3 were obtained. According tomany authors, this would be considered to be a thin shell; never-theless this example shows that the thin theory gives values thatdiffer appreciably from the FSDT values, under predicting displace-ments and velocities. The membrane inertia also has some effect,but lower than the one of shear deformation. The non-linear termsare not very significant in this example.
Still in the same shell, but with a larger amplitude force, the re-sults shown in Figs. 4 and 5, were achieved. It is obvious that thedifferent approaches (thin, FSDT, with/without membrane inertia)lead to different oscillations. An investigation of the Poincaré sec-tions revealed that the steady state oscillation had not been yetachieved at the 725th excitation cycle in the case of the FSDTand with membrane inertia model. This oscillation is very slowlytending towards either a periodic oscillation or to a quasi-periodic
-6
-4
-2
0
2
4
6
8
-1 -0.75 -0.5 -0.25 0 0.25 0.5 0.75
b
w/h
2w
h
πω
.
= 20, b/R = 0.4, to a force with 1.25 � 106 N m�2: FSDT with membrane inertia (—);without membrane inertia (j).
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
.06 -0.04 -0.02 0 0.02 0.04 0.06
w/h
2w
hωπ .
, force with 1 � 104 N m�2: FSDT with membrane inertia (—) and without membrane(j).

-12
-7
-2
3
8
13
-1.75 -0.75 0.25 1.25
-15
-10
-5
0
5
10
15
20
-2 -1 0 1 2
-10
-5
0
5
10
15
-2.5 -1.5 -0.5 0.5 1.5
-10
-5
0
5
10
15
-1.75 -0.75 0.25 1.25
2w
h
πω
.
w/h
2w
h
πω
.
w/h
2w
h
πω
.
w/h
2w
h
πω
.
w/h
Fig. 5. Phase plots of response at the middle point of shell a/h = 50, b/R = 0.4, to a force with 105 N m�2: FSDT with membrane inertia (—) and without membrane inertia(—d—); thin shell theory with membrane inertia (—h—) and without (—j—).
-2
-1.5
-1
-0.5
0
0.5
1
1.5
400 400.5 401 401.5 402 402.5 403
w/h
2t
ωπ
Fig. 4. Time histories at the middle point of shell a/h = 50, b/R = 0.4, force with 105 N m�2: FSDT with membrane inertia (—) and without membrane inertia (d); thin shelltheory with membrane inertia (h) and without (j).
182 P. Ribeiro / Composites Science and Technology 69 (2009) 176–185
oscillation in a torus. The other three models apparently predictquasi-periodic oscillations, because the respective collections ofpoints in the Poincaré sections define closed lines [40].
In a numerical test carried out in the b/R = 0.2 shell (not por-trayed), the difference between FSDT and thin theory was againevident, although smaller than the one verified in the two tests justdiscussed and in other tests on the b/R = 0.4 shell.
Now let us examine thinner shells, by choosing a/h = 100. Theinfluence of neglecting the membrane inertia or shear deformationat low amplitude excitations was found to be very small. Neverthe-less, if a larger excitation is applied, then a different behaviour isfound. The differences in the displacements computed with andwithout membrane inertia are small in the first cycles, butFig. 6a shows that they already appear after the 10th excitation cy-

-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
10 10.5 11 11.5 12 12.5 13 13.5 14 14.5 15
-1.75-1.5
-1.25
-1.25
-1-0.75
-0.75
-0.5-0.25
00.25 0.250.5
0.750.751
1.25
1.251.51.75
2
-2.25 -1.25 -0.25 0.75 1.75 -0.25-0.25-1.75 -1.25 -0.75 0.25 0.75 1.25
a
cb
w/h
2w
h
πω
.
w/h
2w
h
πω
.
w/h
2t
πω
Fig. 6. Time histories (a) and phase plots, (b) and (c), of response at the middle point of shell a/h = 100, b/R = 0.2, due to a force with 104 N m�2: FSDT with membrane inertia(—) and without membrane inertia (d); thin shell theory with membrane inertia (h) and without membrane inertia (j).
P. Ribeiro / Composites Science and Technology 69 (2009) 176–185 183
cle. To distinguish the different solutions, only very limited timesegments are shown in Fig. 6. As time evolves, the differences inthe solutions from the diverse models become more and moreimportant. Figs. 6b and c show phase plots where only later cyclesare considered, and the difference between the four models is evi-dent. From these phase plots and from the Poincaré sections (notshown due to space limitations) we infer that all models predictquasi-periodic motions [40], except the thin shell without mem-brane inertia model, which predicts a periodic solution.
Having in mind that shear deformation becomes less importantas the thickness decreases, the behaviour of shell a/h = 200 wasinvestigated. The response to low amplitude excitations was notsignificantly influenced by shear deformation or membrane inertia.But applying large amplitude excitations responses like the onesshown in Fig. 7 were obtained: although this shell is rather thin,all models predict a different behaviour. The difference is qualita-tively very large, since the FSDT model with membrane inertia pre-dicts a periodic motion, and the models without membrane inertiapredict quasi-periodic motions (conclusions achieved also with thehelp of Poincaré sections).
As a limit case in the lower end, a shell where a/h = 500 wasanalysed, considering excitations with different amplitudes andat different frequencies. It should be pointed out that we arenot really concerned with the feasibility of building such a shellwith the particular value of a chosen in Section 4 (a = 0.25 m):these tests were carried out in order to verify how the differentmodels behave in very thin shells. No significant difference re-
sulted from using thin or FSDT models, with or without mem-brane inertia. This indicates that there is a thickness at whichshear and membrane inertia become eventually not importantin non-linear dynamics.
Some examples on plates were also carried out, and thedynamics were not so affected by shear deformation or mem-brane inertia as in shells. Plate dynamics are different for a num-ber of reasons. First, unlike a shell, a perfect plate withoutmembrane compression forces (due, e.g., to moving boundariesor to thermal expansion) does not buckle. Second, as noticed in[17], when an initially flat plate vibrates the membrane strainsare always tensile. In a shell, the outbound part of oscillation isalso associated with positive membrane strains, but in the in-bound part of oscillation the membrane strain becomes negative,causing an apparent stiffness reduction. For that reason the timewhen shallow shell remains below the equilibrium configurationis longer than half of the period, and the negative deflection haslarger absolute value than the positive deflection. These intrinsicasymmetry characteristics of shells promote the appearance ofhigher harmonics, hence higher frequencies, in the oscillations,turning shear deformation and membrane inertia more importantin shells than in plates.
6. Final comments
The importance of shear deformation and membrane inertiaon the large amplitude vibrations of shallow laminated shells

-1.5
-1
-0.5
0
0.5
1
200 200.5 201 201.5 202
-12
-10
-8
-6
-4
-2
0
2
4
6
8
10
-1.5 -1 -0.5 0 0.5 1
-12-10-8-6-4-202468
10
-1.75 -0.75 0.25
-10
-8
-6
-4
-2
0
2
4
6
8
-1.75 -0.75 0.25
a b
c d
w/h
2w
h
πω
.
w/h 2
tπ
ω
2w
h
πω
.
2t
πω
2w
h
πω
.w/h
2t
πω
Fig. 7. Time histories (a) and phase plots (b–d) of shell a/h = 200, b/R = 0.2, excitation 5 � 103 N m�2, computed at the middle point with FSDT with membrane inertia (—) andwithout membrane inertia (—d—); thin shell theory with membrane inertia (—h—) and without (—j—).
Table A1Linear natural frequencies (rad/s) of shell a/h = 20 and b/R = 0.2.
Mode FSDT MI FSDT MI TST MI TST WMI
1 12500.4 12502.1 14012.9 14014.82 18499.0 18513.4 21216.8 21233.13 25637.7 25640.5 32531.3 32534.74 28718.9 28726.0 34003.2 34011.45 31258.9 31268.3 39864.2 39876.66 39228.0 39237.7 49789.4 49804.5
Table A2Linear natural frequencies (rad/s) of shell a/h = 20 and b/R = 0.4.
Mode FSDT MI FSDT MI TST MI TST WMI
1 14557.2 14565.6 15880.9 15889.92 18794.5 18852.9 21465.6 21531.73 26766.6 26778.2 33430.7 33444.94 28975.5 29002.7 34179.7 34211.75 31681.5 31719.7 40204.5 40254.86 39409.0 39448.1 49866.2 49927.1
184 P. Ribeiro / Composites Science and Technology 69 (2009) 176–185
was analysed. The literature review and the analyses of this paperindicate that the consideration of shear deformation is, with nodoubt – meaning whatever the motion experienced by the panel– required when a/h = 25 or lower, and strongly recommendeduntil at least a/h = 50. Membrane inertia was verified to be, inmost instances, less important than shear deformation. Whenthe motions are periodic and not very affected by higher frequen-cies, it is apparent that the membrane inertia has a limited effecton the dynamics of laminated shells with clamped boundaries,vibrating under transverse excitations. As general rules, shear be-comes less important as the thickness diminishes and the influ-ence of the membrane inertia does not depend much onthickness.
Important exceptions to the above rules occur in non-linearvibrations. For example, although the first linear natural frequenciesare rather well predicted by thin shell theory without membraneinertia at a/h = 50, the non-linear oscillations require the consider-ation both of shear deformation and of membrane inertia: totallydifferent motions were predicted by the diverse theories at a/h = 50 and for even larger length to thickness relations, as for exam-ple a/h = 200.
Hence, it is a major result of this paper that what are not usuallyconsidered to be thick shells may require in fact a FSDT model, ifnon-linear vibrations are to be analysed. This advice is justifiedby two reasons characteristic of non-linear oscillations: (1) the dif-ferent models may lead to different attractors for the same excita-tion frequency and initial conditions, and (2) higher frequencycomponents may appear in the motion, due to non-linear modalcoupling, increasing the importance of shear deformation andmembrane inertia.
Appendix A. Linear natural frequencies
The following tables (Tables A1–A7) give the linear natural fre-quencies of shells analysed in Section 5, computed with the fourmodels that are compared in this paper. FSDT stands for first ordershear deformation theory, TST for thin shell theory, MI for mem-brane inertia and WMI for without membrane inertia. The TST ele-ments employed had 49 transverse and 200 membrane shape

Table A3Linear natural frequencies (rad/s) of shell a/h = 50 and b/R = 0.2.
Mode FSDT MI FSDT MI TST MI TST WMI
1 6757.83 6758.82 6855.40 6856.402 8479.01 8485.28 8694.45 8700.863 13058.9 13060.3 13642.1 13643.64 13312.9 13315.9 13744.7 13747.85 15426.4 15430.8 16209.9 16214.66 19066.8 19071.6 20002.2 20007.4
Table A4Linear natural frequencies (rad/s) of shell a/h = 50 and b/R = 0.4.
Mode FSDT MI FSDT MI TST MI TST WMI
1 9166.05 9192.88 9367.82 9395.162 9716.15 9724.58 9824.32 9832.543 14036.1 14044.7 14416.2 14425.54 15115.2 15122.4 15634.9 15642.15 16358.4 16377.1 17105.3 17124.96 19400.2 19420.1 20283.6 20305.2
Table A5Linear natural frequencies (rad/s) of shell a/h = 100 and b/R = 0.2.
Mode FSDT MI FSDT MI TST MI TST WMI
1 4667.71 4671.10 4694.18 4697.582 4901.45 4902.48 4915.25 4916.273 7161.13 7162.26 7211.58 7212.734 7750.68 7751.57 7820.16 7821.055 8459.17 8461.55 8560.01 8562.436 10031.7 10034.3 10150.0 10152.6
Table A6Linear natural frequencies (rad/s) of shell a/h = 100 and b/R = 0.4.
Mode FSDT MI FSDT MI TST MI TST WMI
1 5790.12 5805.99 5814.16 5830.112 6515.27 6523.93 6559.46 6568.173 9858.10 9862.13 9892.10 9895.344 10063.6 10072.6 10143.2 10153.05 10125.8 10136.4 10225.8 10236.46 10676.2 10687.9 10772.9 10784.6
Table A7Linear natural frequencies (rad/s) of shell a/h = 200 and b/R = 0.2.
Mode FSDT MI FSDT MI TST MI TST WMI
1 2910.01 2912.00 2913.06 2915.052 3277.40 3278.49 3283.00 3284.093 4943.30 4943.72 4947.27 4947.674 5064.76 5065.97 5075.27 5076.505 5104.17 5105.48 5116.86 5118.186 5378.60 5380.06 5390.85 5392.31
P. Ribeiro / Composites Science and Technology 69 (2009) 176–185 185
functions; the FSDT elements had, in addition, 162 rotation shapefunctions.
References
[1] Szabó BA, Babuska I. Finite element analysis. New york: John Wiley and Sons;1991.
[2] Ribeiro P. Forced non-linear vibration of cylindrical laminated shells by the p-version finite element method. In: Proceedings of the 45th AIAA/ASME/ASCE/
AHS/ASC structures, structural dynamics & materials conference, AIAA 2004-1865, 2004.
[3] Petyt M. Introduction to finite element vibration analysis. Cambridge:Cambridge University Press; 1990.
[4] Liew KM, Lim CW, Kitipornchai S. Vibration of shallow shells: a review withbibliography. Appl Mech Rev 1997;50(8):431–44.
[5] Yang HTY, Saigal S, Masud A, Kapania RK. A survey of recent shell finiteelements. Int J Numer Methods Eng 2000;47:101–27.
[6] Moussaoui F, Benamar R. Non-linear vibrations of shell-type structures: areview with bibliography. J Sound Vib 2002;255(1):161–84.
[7] Amabili M, Pa MP. Review of studies on geometrically nonlinear vibrations anddynamics of circular cylindrical shells and panels, with and without fluid–structure interaction. Appl Mech Rev 2003;56:349–81.
[8] Chia CY. Nonlinear analysis of plates. New York: McGraw-Hill; 1980.[9] Leissa AW. Vibration of shells. Acoustical Society of America; 1993.
[10] Qatu MS. Vibration of laminated shells and plates. Amsterdam: Elsevier; 2004.[11] Reddy JN. Mechanics of laminated composite plates and shells: theory and
analysis. Boca Raton: CRC Press; 2004.[12] Amabili M. Nonlinear vibrations and stability of shells and
plates. Cambridge: Cambridge University Press; 2008.[13] Leissa AW, Kadi AS. Curvature effects on shallow shell vibrations. J Sound Vib
1971;16(2):173–87.[14] Wang J, Schweizerhof K. Study on free vibration of moderately thick
orthotropic laminated shallow shells by boundary-domain elements. ApplMath Model 1996;20(8):579–84.
[15] Abe A, Kobayashi Y, Yamada G. Nonlinear vibration characteristics of clampedlaminated shallow shells. J Sound Vib 2000;234(3):405–26.
[16] Abe A, Kobayashi Y, Yamada G. One-to-one internal resonance of symmetriccrossply laminated shallow shells. J Appl Mech, Trans ASME 2001;68:640–9.
[17] Przekop A, Azzouz MS, Guo X, Mei C. Finite element multiple-mode approachto nonlinear free vibrations of shallow shells. AIAA J 2004;42(11).
[18] Singh AV. Linear and geometrically nonlinear vibrations of fiber reinforcedlaminated plates and shallow shells. Comput Struct 2000;76(1–3):277–85.
[19] Amabili M. Comparison of shell theories for large-amplitude vibrations ofcircular cylindrical shells: Lagrangian approach. J Sound Vib2003;264:1091–125.
[20] Amabili M. Theory and experiments for large-amplitude vibrations of circularcylindrical panels with geometric imperfections. J Sound Vib 2006;298:43–72.
[21] Sathyamoorthy M. Vibration of plates considering shear and rotatory inertia.AIAA J 1978;16:285–6.
[22] Kobayashi Y, Leissa AW. Large amplitude free vibration of thick shallow shellssupported by shear diaphragms. Int J Non-Linear Mech 1995;30(1):57–66.
[23] Santos JVA dos, Araújo AL, Soares CMM. Eigenfrequency analysis of completelyfree multilayered rectangular plates using a higher-order model and Ritztechnique. Mech Compos Mater Struct 1998;5(5):55–80.
[24] Shen H-S, Zheng J-J, Huang X-L. Dynamic response of shear deformablelaminated plates under thermomechanical loading and resting on elasticfoundations. Compos Struct 2003;60:57–66.
[25] Ribeiro P. Non-linear forced vibrations of thin/thick beams and plates bythe finite element and shooting methods. Comput Struct 2004;82:1413–23.
[26] Ribeiro P. First-order shear deformation, p-version, finite element forlaminated plate nonlinear vibrations. AIAA J 2005;43(6):1371–9.
[27] Tessler A, Hughes TJR. A three-node Mindlin plate element with improvedtransverse shear. Comput Methods Appl Mech Eng 1985;50:71–101.
[28] Noor AK, Burton WS. Stress and free vibration analyses of multilayeredcomposite plates. Compos Struct 1989;11:183–204.
[29] Noor AK, Burton WS. Predictor–corrector procedure for stress and freevibration analyses of multilayered composite plates and shells. ComputMethods Appl Mech Eng 1990;82:341–63.
[30] Han W. The analysis of isotropic and laminated rectangular platesincludinggeometrical non-linearity using the p-version finite element method. PhDthesis, University of Southampton; 1993.
[31] Ribeiro P. A hierarchical finite element for geometrically non-linear vibrationof doubly curved, moderately thick isotropic shallow shells. Int J NumerMethods Eng 2003;56:715–38.
[32] Irons B. Structural eigenvalue problems – elimination of unwanted variables.AIAA J 1965;3(5):961–2.
[33] Guyan RJ. Reduction of stiffness and mass matrices. AIAA J 1965;3(2):380.[34] Cheng GF, Mei C. Finite element modal formulation for hypersonic panel
flutter analysis with thermal effects. AIAA J 2004;42:687–95.[35] Librescu L, Khdeir AA, Frederick D. A shear deformable theory of laminated
composite shallow shell-type panels and their response analysis I: freevibration and buckling. Acta Mech 1989;76:1–33.
[36] Reddy JN, Liu CF. A higher-order shear deformation theory of laminated elasticshells. Int J Eng Sci 1985;23:319–30.
[37] Akay HU. Dynamic large deflection analysis of plates using mixed finiteelements. Comput Struct 1980;11:1–11.
[38] Touratier M. A refined theory of laminated shallow shells. Int J Solids Struct1992;29(11):1401–15.
[39] Qatu MS. On the validity of nonlinear shear deformation theories for laminatedplates and shells. Compos Struct 1994;27(4):395–401.
[40] Nayfeh AH, Balachandram B. Applied nonlinear dynamics: analytical,computational, and experimental methods. New York: John Wiley and Sons; 1995.