Embed Size (px)
Citation preview

Applied Mathematics and Computation 205 (2008) 442–453
Contents lists available at ScienceDirect
Applied Mathematics and Computation
journal homepage: www.elsevier .com/ locate /amc
On the class of high order time stepping schemes based on Padéapproximations for the numerical solution of Burgers’ equation
M. YousufDepartment of Mathematics and Statistics, King Fahd University of Petroleum and Minerals, Dhahran 31261, Saudi Arabia
a r t i c l e i n f o
Keywords:Finite differencePadé approximationsBurgers’ equationHeat equationL-Stable methods
0096-3003/$ - see front matter � 2008 Elsevier Incdoi:10.1016/j.amc.2008.08.025
E-mail address: [email protected]
a b s t r a c t
Numerical solution of Burgers’ equation is presented using finite difference methods inspace and positivity preserving Padé approximations in time. A class of high order timestepping schemes is introduced. For practical purposes, first, second, third, and fourth orderschemes are constructed. Efficient parallel versions of these schemes are given using asplitting technique of rational functions. Accuracy of the schemes is demonstrated by solv-ing a test problem and comparing numerical results with the exact solution. Time evolu-tion graphs show the physical phenomenon of the problem. Convergence tables aregiven to verify the theoretical order of convergence.
� 2008 Elsevier Inc. All rights reserved.
1. Introduction
Burgers’ equation was first introduced by Bateman [1] and then treated by Burger [2,3] as a mathematical model for tur-bulence. Burgers’ equation can be solved exactly for a restricted set of initial functions. Hopf [6] and Cole [4] independentlyshowed that this equation can be transformed to a linear diffusion equation and solved exactly for arbitrary initial condi-tions. Study of the general properties of Burgers’ equation has motivated considerable attention due to its applications inareas such as number theory, gas dynamics, heat conduction and elasticity. Many researchers have introduced various meth-ods to solve Burgers’ equation. For example, recent developments in this area include: invariantization of the Crank–Nicolsonscheme for Burgers’ equation developed by Pilwon [16], a numerical method based on the Crank–Nicolson scheme devel-oped by Mohan et al. [13], Mustafa [15] used finite difference approach to solve Burgers’ equation, Katsuhiro [9] developeda numerical scheme based on a solution of nonlinear advection–diffusion equations, _Idris et al. [7] used cubic B-splines todevelop a numerical method for Burgers’ equation, Kutluay [11] developed a linearized numerical scheme for Burgers’-likeequations, Refik [17] developed fully implicit finite-difference scheme for two-dimensional Burgers’ equations, Kutluay et al.[10] developed explicit and exact-explicit finite difference methods for one-dimensional Burgers’ equation. Burgers’ equationis solved numerically in all these papers and the numerical solution is compared with the exact solution at various gridpoints.
We use the Hopf–Cole transformation to transform the Burgers’ equation into a heat equation. Spatial derivatives areapproximated using second order central finite difference methods which results in a tridiagonal system of semidiscretizedlinear equations. The exact solution of the discretized system is obtained using Duhamel’s principle. Matrix exponentialfunctions in the exact solution can be approximated using rational functions such as: rational functions with real poles[19,22] or rational Padé approximations [23–25]. We use positivity preserving Padé approximations to approximate the ma-trix exponential functions and construct a family of L-stable schemes. Computationally efficient parallel versions of these
. All rights reserved.

M. Yousuf / Applied Mathematics and Computation 205 (2008) 442–453 443
schemes are constructed using a splitting technique which saves computational cost by (almost) 50%. As a result of the split-ting, it is required to solve well-conditioned backward Euler type problems.
Accuracy and reliability of these schemes is verified by comparing numerical solutions with the exact solution. Conver-gence tables are given to verify the theoretical order of convergence of the schemes. Also, time evolution graphs for differentparameter values are given. These graphs show behavior (physical phenomenon of the given problem) of these schemes aswe march in the time domain.
2. The problem statement
We consider the one-dimensional quasi-linear parabolic partial differential equation in the form:
ouotþ u
ouox¼ 1
Reo2uox2 ðx; tÞ 2 X ¼ ð0;XÞ � ð0; T� ð2:1Þ
with initial and boundary conditions as
uðx;0Þ ¼ f ðxÞ; x 2 ð0;XÞ; ð2:2Þuð0; tÞ ¼ g1ðtÞ; t 2 ð0; T�; ð2:3ÞuðX; tÞ ¼ g2ðtÞ; t 2 ð0; T�; ð2:4Þ
where Re is the Reynolds number and f, g1 and g2 are sufficiently smooth given functions.Many problems can be modeled by Burgers’ equation (2.1), for example it can be considered as a simplified form of the
Navier–Stokes equations. Burgers’ equation contains a linear diffusion term and a nonlinear advection term and can besolved exactly but only for a restricted set of initial conditions. The Hopf–Cole transformation [4,6]:
uðx; tÞ ¼ � 2Re
/x
/; ð2:5Þ
relates Eq. (2.1) to the linear heat equation:
o/ot¼ 1
Reo2/ox2 ; ð2:6Þ
in the sense that if /ðx; tÞ is a solution of (2.6), then uðx; tÞ obtained by using (2.5) is a solution of (2.1), and conversely if uðx; tÞis a solution of (2.1) then /ðx; tÞ obtained by solving (2.5) is a solution of (2.6).
Transformed initial and boundary conditions for Eq. (2.6) are:
/ðx; 0Þ ¼ exp �Re2
Z x
0f ðnÞdn
� �; 0 6 x 6 X; ð2:7Þ
/xð0; tÞ ¼ /xðX; tÞ ¼ 0; t P 0; ð2:8Þ
where Neumann boundary conditions (2.8) hold iff g1ðtÞ ¼ g2ðtÞ ¼ 0.
3. Exact solution
The Fourier series solution of the transformed linear heat equation (2.6) along with initial and boundary conditions (2.7)and (2.8) is given as
/ðx; tÞ ¼ a0 þX1n¼1
an exp �n2p2tRe
� �cosðnpxÞ; ð3:1Þ
where the Fourier coefficients are:
a0 ¼Z 1
0exp �Re
2
Z x
0f ðnÞdn
� �dx; ð3:2Þ
and
an ¼ 2Z 1
0exp �Re
2
Z x
0f ðnÞdn
� �cosðnpxÞdx: ð3:3Þ
Exact solution of Burgers’ equation (2.1) obtained using Hopf–Cole transformation (2.5) is
uðx; tÞ ¼ 2pRe
� � P1n¼1an exp � n2p2t
Re
n on sinðnpxÞ
a0 þP1
n¼1an exp � n2p2tRe
� �cosðnpxÞ
: ð3:4Þ

444 M. Yousuf / Applied Mathematics and Computation 205 (2008) 442–453
4. Spatial approximations
We shall solve (2.6) with initial condition (2.7) and Neumann boundary conditions (2.8). Let N and M be the number ofgrid points in the x- and t-direction, respectively. Let h ¼ X=N, k ¼ T=M and let xi ¼ ihx; i ¼ 0; . . . ;N, tj ¼ jk; j ¼ 0; . . . ;M. Val-ues of the finite difference approximations of /ðx; tÞ at the grid are denoted by
/i;j ¼ /ðxi; tjÞ: ð4:1Þ
Assume that /ðx; tÞ is twice differentiable w.r.t. x and replace the partial derivatives in (2.6) with respect to x by the sec-ond order central differences:
o2/ox2 ¼
/ðxþ h; tÞ � 2/ðx; tÞ þ /ðx� h; tÞh2 þ Oðh2Þ; as h! 0;
which can be derived using the Taylor series expansion of /ðxþ hÞ and /ðx� hÞ. This discretization results in an initial-valueproblem of the form:
dUðtÞdt
¼ AUðtÞ; Uð0Þ ¼ U0; ð4:2Þ
where the matrix A is as follows:
A ¼ 1
h2
�2 21 �2 1
. .. . .
. . ..
1 �2 12 �2
26666664
37777775:
By Duhamel’s principle [21], the exact solution of (4.2) can be written as
UðtÞ ¼ EðtÞU0; ð4:3Þ
where EðtÞ ¼ etA is the solution operator. Replacing t by t þ k, we can write the exact solution (4.3) as
Uðt þ kÞ ¼ Eðt þ kÞU0 ¼ EðkÞEðtÞU0 ¼ EðkÞUðtÞ;
which satisfies the recurrence formula:
Uðtnþ1Þ ¼ ekAUðtnÞ; ð4:4Þ
where 0 < k 6 k0, for some k0, is the time step and tn ¼ nk.
5. Time stepping scheme
Recurrence formula (4.4) is the basis of different time stepping schemes depending upon how we approximate the matrixexponential functions. We shall use positivity preserving Padé approximations of the matrix exponential functions ekA toconstruct a family of time stepping schemes.
5.1. Padé approximations
Use of Padé approximations as rational function approximations of the matrix exponential functions is an important and awidely used tool (see [18,21,23–25]). Padé approximations are derived by expanding a function as a ratio of two power seriesand determining coefficients of both the numerator and the denominator. These are generalizations of the power seriesapproximations and are usually superior to Taylor expansions when functions contain poles, because the use of rationalfunctions allows them to be well-represented. Let Pn;mðzÞ and Qn;mðzÞ be two polynomials of degree n and m, respectively.Then the rational function Rn;m ¼ Pn;mðzÞ
Qn;mðzÞis an approximation of order nþm to a function f ðzÞ if:
f ðzÞ ¼ Pn;mðzÞQn;mðzÞ
þ Oðznþmþ1Þ:
The polynomials of the Padé approximations for e�z can be written as
Pn;mðzÞ ¼Xn
j¼0
ðmþ n� jÞ!n!
ðmþ nÞ!j!ðn� jÞ! ð�zÞj; and
Q n;mðzÞ ¼Xm
j¼0
ðmþ n� jÞ!m!
ðmþ nÞ!j!ðm� jÞ! ðzÞj:

M. Yousuf / Applied Mathematics and Computation 205 (2008) 442–453 445
It is well known [18] that Rn;mðzÞ ¼ e�z þ Oðjzjmþnþ1Þ as z! 0. The ðn;mÞ-Padé approximant Rn;mðzÞ to e�z is (see [12]):
(i) A-acceptable if n ¼ m.(ii) A0-acceptable if n 6 m.
(iii) L-acceptable if n ¼ m� 1 or n ¼ m� 2.
Because of the practical purpose, following examples of Padé approximations of e�z are of particular interest, backwardEuler, R0;1ðzÞ ¼ ð1þ zÞ�1, Crank–Nicolson, R1;1ðzÞ ¼ 1� 1
2 z�
1þ 12 z
� �1, as well as some other interesting schemes, such as
R0;2ðzÞ ¼ 1þ zþ 12
z2� ��1
;
R2;2ðzÞ ¼ 1� 12
zþ 112
z2� �
1þ 12
zþ 112
z2� ��1
;
R0;3ðzÞ ¼ 1þ zþ 12
z2 þ 16
z3� ��1
;
R0;4ðzÞ ¼ 1þ zþ 12
z2 þ 16
z3 þ 124
z4� ��1
:
In general, R0;mðzÞ ¼ P0;mðzÞQ0;mðzÞ
where P0;mðzÞ ¼ 1 and Q0;mðzÞ ¼Pm
j¼0zj
j!. An interesting development is the use of positivity pre-serving Padé schemes, which has arisen in the past decade. The notion of a positive scheme was introduced as a refinementof L0-stability. A positive scheme (for y0 þ ky ¼ 0) has a positive symbol on the positive real axis and is monotonicallydecreasing to 0.
Definition 1. A numerical scheme is called positivity preserving if the graph of its stability function is positive on thepositive x-axis and converges to zero monotonically.
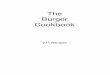
The ð0;mÞ-Padé schemes are positivity preserving and we shall take advantage of this property to construct our L-stablemethods. Figs. 1 and 2 show the amplification symbols and behavior of some Padé schemes.
5.2. Parallel splitting of Padé approximations
Use of higher order Padé approximations has until recently been mostly avoided because of difficulties in computing theinverses of polynomial functions of matrices. Inverting higher order matrix polynomials can cause computational inaccura-cies due to high condition numbers and roundoff error in computing the powers of the matrices, see [14]. It has become pos-sible to efficiently implement parallel and serial versions of the higher order Padé approximations using partial fractiontechniques and complex arithmetic [23–25].
Using the algorithms of Gallopoulos and Saad [5] and Khaliq et al. [8], we can implement the schemes in parallel (withcomplex arithmetic) that allows efficient and accurate computations on serial or parallel machines.
0 2 4 6 8 10-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
z
r(z)
Exp( z)Pade(1,1)Pade(2,2)
_
Fig. 1. Amplification symbols fðz; rðzÞÞ : z P 0g of two diagonal Padé approximations.

0 2 4 6 8 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
z
r(z)
Exp( z)Pade(0,1)Pade(0,2)Pade(0,3)Pade(0,4)
_
Fig. 2. Amplification symbols fðz; rðzÞÞ : z P 0g of four positivity preserving Padé approximations involved in the design of the schemes.
446 M. Yousuf / Applied Mathematics and Computation 205 (2008) 442–453
For n ¼ 0, we can write:
R0;mðzÞ ¼Xm1
i¼1
wi
z� ciþ 2
Xm1þm2
i¼m1þ1
Rwi
z� ci; ð5:1Þ
where R0;mðzÞ has m1 real and 2m2 nonreal poles fcig with corresponding weights wi ¼ 1Q 00;mðciÞ
.
6. Numerical schemes: some examples
The scheme for Unþ1 ¼ ekAUn, ð�z ¼ kAÞ where Un ¼ UðtnÞ, can be computed through the following algorithm:Algorithm:For i ¼ 1; . . . ;m1 þm2, solve (ciI � kAÞyi ¼ wiUn, and compute
Unþ1 ¼Xm1
i¼1
yi þ 2Xm1þm2
i¼m1þ1
RðyiÞ:
Second and higher order schemes involve matrix polynomial inverses with the order of polynomials equal to the order ofthe scheme. Second order central difference schemes for spatial approximations results in a tridiagonal matrix. Using theabove mentioned algorithm, we need only solve linear algebraic tridiagonal systems. These systems can be solved using atridiagonal solver which only requires storing three diagonals of the matrix A. The number of diagonals of A increases withthe powers of A. For example A2 is a five diagonal matrix, A3 is seven and A4 is a nine diagonal matrix. Without splitting, notonly can we not use a tridiagonal solver, but also more and more diagonals of A are required and involved in the computa-tions which can cause computational difficulties and make the schemes computationally less efficient.
Using the above-mentioned algorithm, we have constructed four L-stable numerical schemes using R0;mðkAÞ for m ¼ 1, 2,3 and 4:
(a) A first order scheme (Backward Euler):
Unþ1 ¼ ðI � kAÞ�1Un:
We solve ðI � kAÞy ¼ Un and compute Unþ1 ¼ y.(b) A second order scheme:
Unþ1 ¼ ðI � kAþ 12
k2A2Þ�1Un ¼ 2Rfw1ðc1I � kAÞ�1Ung
with w1 ¼ �i and c1 ¼ 1þ i. We solve ðc1I � kAÞy ¼ w1Un and compute Unþ1 ¼ 2RðyÞ.(c) A third order scheme:
Unþ1 ¼ I � kAþ 12
k2A2 � 16
k3A3� ��1
Un ¼ w1ðc1I � kAÞ�1Un þ 2Rfw2ðc2I � kAÞ�1Ung

M. Yousuf / Applied Mathematics and Computation 205 (2008) 442–453 447
with
w1 ¼ �1:4756865177957201;c1 ¼ 1:596071637983322;w2 ¼ 0:737843258897860þ i0:365017840801028;c2 ¼ 0:70196418100839� i1:807339494452022:
We solve ðc1I � kAÞy1 ¼ w1Un and ðc2I � kAÞy2 ¼ w2Un and compute:
Unþ1 ¼ y1 þ 2Rðy2Þ:
(d) A fourth order scheme:
Unþ1 ¼ I � kAþ 12
k2A2 � 16
k3A3 þ 124
k4A4� ��1
Un ¼ 2Rfw1ðc1I � kAÞ�1Ung þ 2Rfw2ðc2I � kAÞ�1Ung
with
w1 ¼ 0:541413348429154� i0:248562520866115;c1 ¼ 0:270555768932292� i2:50477590436244;w2 ¼ �0:541413348429182� i1:58885918222330;c2 ¼ 1:72944423106769þ i0:888974376121862:
We solve ðc1I � kAÞy1 ¼ w1Un and ðc2I � kAÞy2 ¼ w2Un and compute:
Unþ1 ¼ 2Rðy1Þ þ 2Rðy2Þ:
Note: Using ð1;1Þ-Padé approximation of e�z as R1;1ðzÞ ¼1�1
2z
1þ12z
results in the Crack–Nicolson scheme ðz ¼ �kAÞ,
Unþ1 ¼ I � 12
kA� ��1
I þ 12
kA� �
Un;
This is unconditionally stable but it is only A-stable. Clearly, jR1;1ðzÞj < 1 for z > 0, but R1;1ðzÞ ! �1 as z!1 as is also shownin Fig. 1. In general L-stable schemes are preferable to A-stable schemes. L-Stable schemes damp unwanted finite oscillationsin the numerical solution rapidly and this eliminates restrictions on the time step k in relation to space step h as occurs in theCrank–Nicolson method where k < hX
p (see [18]). It is common in A-stable methods that unwanted finite oscillations increasein magnitude as space step h is decreased to improve the accuracy.
7. Accuracy, stability, and convergence analysis
Accuracy of the schemes is evident from the fact that Rn;mðzÞ ¼ e�z þ Oðjzjmþnþ1Þ as z! 0 [18,21]. Stability of the schemesis discussed using matrix methods for the linearized heat equation with Neumann boundary conditions. Let r ¼ k
h2, then thefirst order scheme can be written as
Unþ1 ¼ ðI � rAÞ�1Un; ð7:1Þ
where (without 1=h2)
A ¼
�2 21 �2 1. .
. . .. . .
.
1 �2 12 �2
26666664
37777775:
The eigenvalues kj of A are given by
detðA� kIÞ ¼ 0;
which simplifies to (see Ref. [20] for details)
kj ¼ �2þ 2 cosð2j� 1Þp
N � 1
� �; j ¼ 1;2;3; . . . ;N:
Thus, all the eigenvalues of A are nonpositive.

448 M. Yousuf / Applied Mathematics and Computation 205 (2008) 442–453
Let D be the diagonal matrix:
D ¼
ffiffiffi2p
1. .
.
1 ffiffiffi2p
266666664
377777775;
such that A is similar to the symmetric matrix:
eA ¼ D�1AD ¼
�2ffiffiffi2pffiffiffi
2p
�2 1
. .. . .
. . ..
1 �2ffiffiffi2pffiffiffi
2p
�2
266666664
377777775:
Now let B ¼ ðI � rAÞ�1, then
eB ¼ D�1BD ¼ D�1ðI � rAÞ�1D ¼ ½D�1ðI � rAÞD��1 ¼ ðI � reAÞ�1:
Since ðI � reAÞ�1 is symmetric, therefore, eB is symmetric and similar to B. Hence qðBÞ � qðeBÞ, where
qðBÞ ¼ maxijlij
is the spectral radius of B. The necessary and sufficient condition for stability of the scheme is qðBÞ 6 1. Since all the eigen-values ki of A are nonpositive, all the eigenvalues li of B satisfy
li ¼1
1� rki6 1:
Hence the scheme (7.1) is unconditionally stable, since r > 0. For the second order scheme:
Unþ1 ¼ I � rAþ 12
r2A2� ��1
Un; ð7:2Þ
the eigenvalues li of the matrix B ¼ ðI � rAþ 12 r2A2Þ�1 satisfy
li ¼1
1� rki þ 12 k2
i
6 1;
and therefore the scheme (7.2) is unconditionally stable. Similarly, the schemes:
Unþ1 ¼ I � rAþ 12
r2A2 � 16
r3A3� ��1
Un;
Unþ1 ¼ I � rAþ 12
r2A2 � 16
r3A3 þ 124
r4A4� ��1
Un;
are also unconditionally stable with no restriction on the time step k. Unconditional stability of these schemes is also clearfrom the fact that these schemes can be written as the sum of backward Euler type schemes using spitting technique.
Convergence of the schemes follows from the following theorem from Thomée [21, Ch. 7].
Theorem 7.1. Assume that the time discretization scheme is accurate of order m and stable in a Hilbert space H. Then for thesolutions of (2.6) and (4.4), we have:
kUn � /ðtnÞk 6 Ckmj/0j2m; t > 0; ð7:3Þ
where /0 ¼ /ðx;0Þ.
Convergence of the schemes is also clear from Lax’s theorem [20] which states that ‘‘if a two level difference scheme isaccurate of order ðp; qÞ in the norm k � k to a well-posed linear initial-value problem and is stable with respect to the normk � k, then it is convergent of order ðp; qÞ with respect to the norm k � k”.
8. Numerical experiments
In this section, we shall demonstrate performance of the proposed schemes by solving a test problem in detail. The spatialdiscretization in all the experiments will be, for simplicity, a second-order central difference scheme on a uniform mesh of

M. Yousuf / Applied Mathematics and Computation 205 (2008) 442–453 449
size h, see [18] for details. We shall present graphs of the exact and numerical solutions for different parameter values. Todemonstrate accuracy of these schemes, we have computed convergence tables for the second, third, and fourth orderschemes. Reader should note that to implement our schemes, only basic algebraic operations are needed in our program-ming and no Matlab subroutine is required.
Exact solution obtained using a Hopf–Cole transformation is given in form of a Fourier series. Matlab numerical integra-tion subroutines are needed to compute these Fourier coefficients. In order to compute the convergence tables, we are care-ful to choose h sufficiently small so that the spatial component of the error is negligible. All the numerical schemes areimplemented in serial using the split versions described earlier. Without these splitting the higher polynomial functionsof the matrices that must be inverted could cause numerical difficulties.
Example 1. Consider Burgers’ equation (2.1) with initial and boundary conditions:
Table 1Exampl
Dt
0.10.050.250.01250.00625
Table 2Exampl
Dt
0.10.050.250.01250.00625
Table 3Exampl
Dt
0.10.050.250.01250.00625
uðx;0Þ ¼ sinðpxÞ; x 2 ð0;1Þ; ð8:1Þuð0; tÞ ¼ uð1; tÞ ¼ 0; t 2 ð0; T�: ð8:2Þ
The Hopf–Cole transformation (2.5) converts (2.1) to the linear heat equation (2.6) with transformed initial condition,
/ðx; 0Þ ¼ exp � Re2p½1� cosðpxÞ�
� �; x 2 ð0;1Þ; ð8:3Þ
and Neumann boundary conditions,
/xð0; tÞ ¼ /xð1; tÞ ¼ 0; t 2 ð0; T�: ð8:4Þ
Using the method of separation of variable the (exact) Fourier series solution to the linearized problem (2.6) with conditions(8.3) and (8.4), can be obtained as
/ðx; tÞ ¼ a0 þX1n¼1
an exp �n2p2tRe
� �cosðnpxÞ; ð8:5Þ
where the Fourier coefficients are
a0 ¼Z 1
0exp � Re
2p½1� cosðpxÞ�
� �dx; ð8:6Þ
e 1: Convergence properties of the second order scheme computed at t ¼ 1 using Re ¼ 1 and Dx ¼ 0:0005
kErrork1 Ratio Order
6:448� 10�5 – –1:665� 10�5 3.872 1.9534:485� 10�6 3.713 1.8931:191� 10�6 3.766 1.9133:092� 10�7 3.852 1.946
e 1: Convergence properties of the third order scheme computed at t ¼ 1 using Re ¼ 1 and Dx ¼ 0:0005
kErrork1 Ratio Order
1:040� 10�5 – –1:753� 10�6 5.929 2.5682:624� 10�7 6.681 2.7403:618� 10�8 7.253 2.8594:795� 10�9 7.546 2.916
e 1: Convergence properties of the fourth order scheme computed at t ¼ 1 using Re ¼ 1 and Dx ¼ 0:0005
kErrork1 Ratio Order
1:879� 10�6 – –1:728� 10�7 10.872 3.4431:327� 10�8 13.019 3.7039:648� 10�10 13.755 3.7828:011� 10�11 12.044 3.590

Table 4Example 1: Exact and numerical values computed at t ¼ 1 using Re ¼ 10, Dt ¼ 0:01 and Dx ¼ 0:0125
x Exact Pade(0, 1) kErrork1ð0;1Þ Pade(0, 2) kErrork1ð0;2Þ
0.10 0.06631583 0.06684038 5:246� 10�4 0.06631396 1:868� 10�6
0.20 0.13120962 0.13220241 9:928� 10�4 0.13120487 4:748� 10�6
0.30 0.19278611 0.19413756 1:351� 10�3 0.19277657 9:543� 10�6
0.40 0.24804108 0.24959564 1:555� 10�3 0.24802422 1:686� 10�5
0.50 0.29191636 0.29348648 1:570� 10�3 0.29188971 2:665� 10�5
0.60 0.31606802 0.31745971 1:392� 10�3 0.31603048 3:754� 10�5
0.70 0.30808967 0.30914443 1:055� 10�3 0.30804382 4:585� 10�5
0.80 0.25371881 0.25436672 6:479� 10�4 0.25367367 4:514� 10�5
0.90 0.14606563 0.14634852 2:829� 10�4 0.14603640 2:923� 10�5
Table 5Example 1: Exact and numerical values computed at t ¼ 1 using Re ¼ 10, Dt ¼ 0:01 and Dx ¼ 0:0125
x Exact Pade(0, 3) kErrork1ð0;3Þ Pade(0, 4) kErrork1ð0;4Þ
0.10 0.06631583 0.06630910 6:733� 10�6 0.06630905 6:778� 10�6
0.20 0.13120962 0.13119611 1:351� 10�5 0.13119604 1:359� 10�5
0.30 0.19278611 0.19276578 2:033� 10�5 0.19276569 2:042� 10�5
0.40 0.24804108 0.24801397 2:711� 10�5 0.24801390 2:718� 10�5
0.50 0.29191636 0.29188289 3:346� 10�5 0.29188287 3:349� 10�5
0.60 0.31606802 0.31602960 3:842� 10�5 0.31602964 3:838� 10�5
0.70 0.30808967 0.30804969 3:998� 10�5 0.30804980 3:987� 10�5
0.80 0.25371881 0.25368373 3:508� 10�5 0.25368387 3:493� 10�5
0.90 0.14606563 0.14604445 2:118� 10�5 0.14604456 2:107� 10�5
0 0.2 0.4 0.6 0.8 10
0.5
1
1.5
2
2.5
3
3.5x 104
x
u(x,
t)
Pade(0,1)Exact
0 0.2 0.4 0.6 0.8 10
1
2
3
4
5
6
7 x 105
x
u(x,
t)
Pade(0,2)Exact
0 0.2 0.4 0.6 0.8 10
1
2
3
4
5
6 x 105
x
u(x,
t)
Pade(0,3)Exact
0 0.2 0.4 0.6 0.8 10
1
2
3
4
5
6x 105
x
t
Pade(0,4)Exact
_ _
__
Fig. 3. Example 1: Graphs of Burgers’ equation using first, second, third and fourth order schemes at t ¼ 1, with Re ¼ 1, Dx ¼ 0:0125 and Dt ¼ 0:05.
450 M. Yousuf / Applied Mathematics and Computation 205 (2008) 442–453

M. Yousuf / Applied Mathematics and Computation 205 (2008) 442–453 451
and
Fig. 4
an ¼ 2Z 1
0exp � Re
2p½1� cosðpxÞ�
� �cosðnpxÞdx: ð8:7Þ
Exact solution of the Burgers’ equation (2.1) with (8.1) and (8.2) using Hopf–Cole transformation (2.5) is
uðx; tÞ ¼ 2pRe
� � P1n¼1an exp � n2p2t
Re
n on sinðnpxÞ
a0 þP1
n¼1an exp � n2p2tRe
� �cosðnpxÞ
: ð8:8Þ
Table 1 shows the convergence order of the second order scheme. Convergence orders for the third and fourth orderschemes, shown in Tables 2 and 3, are sufficiently good although they are not exactly equal to 3 and 4, respectively. Thisdeficiency is likely due to the second order spatial discretization. Taking h sufficiently small can make the spatial com-ponent of the error less than that of the temporal component. But, this requires a large system to solve which can accu-mulate large rounding error. In order to decrease the spatial component of the error, one can use fourth order centraldifference schemes or spectral methods. But there are some other computational and implementation difficulties asso-ciated with higher order finite difference as well as spectral methods. For example, higher order finite differenceschemes involve fictitious points and spatial differentiation matrices in the Chebyshev spectral methods are denseand have very high condition numbers. Exact and numerical values computed for Re ¼ 1 and 10 are given in Tables 4and 5. Figs. 3 and 4 show the graphs of the exact solution and numerical solutions using all four schemes. It is clearthat with the same parameter values, numerical solution approaches to the exact solution as we use higher and higherorder schemes.
Time evolution graphs of the numerical solution of Eq. (2.1) are shown in Fig. 5 for different values of Reynolds’ numbers.These graphs show the physical phenomenon of the problem.
0 0.2 0.4 0.6 0.8 10
0.05
0.1
0.15
0.2
0.25
0.3
0.35
x
u(x,
t)
0 0.2 0.4 0.6 0.8 10
0.05
0.1
0.15
0.2
0.25
0.3
0.35
x
u(x,
t)
0 0.2 0.4 0.6 0.8 10
0.05
0.1
0.15
0.2
0.25
0.3
0.35
x
u(x,
t)
0 0.2 0.4 0.6 0.8 10
0.05
0.1
0.15
0.2
0.25
0.3
0.35
x
t
Pade(0,4)Exact
Pade(0,3)Exact
Pade(0,1)Exact
Pade(0,2)Exact
. Example 1: Graphs of Burgers’ equation using first, second, third and fourth order schemes at t ¼ 1, with Re ¼ 10, Dx ¼ 0:0125 and Dt ¼ 0:05.

00.2
0.40.6
0.81
0
0.5
10
0.5
1
1.5
x
Time Evolution Graph for Re = 10
t
u(x,
t)
00.2
0.40.6
0.81
0
0.5
10
0.5
1
1.5
x
Time Evolution Graph for Re = 50
t
u(x,
t)
00.2
0.40.6
0.81
0
0.5
10
0.5
1
1.5
x
Time Evolution Graph for Re = 100
t
u(x,
t)
00.2
0.40.6
0.81
0
0.5
10
0.5
1
1.5
x
Time Evolution Graph for Re = 200
t
u(x,
t)
Fig. 5. Example 1: Time evolution graphs of Burgers’ equation using fourth order schemes at t ¼ 1, Dx ¼ 0:0125 and Dt ¼ 0:02.
452 M. Yousuf / Applied Mathematics and Computation 205 (2008) 442–453
9. Conclusion
Presented time stepping schemes, based on Padé approximations of the matrix exponential functions, are easy to imple-ment. Use of the splitting technique makes these schemes more efficient, stable and accurate. Higher order methods can alsobe implemented with essentially the same computational complexity as the first-order implicit Euler method. No Matlabsubroutine is required to implement these schemes, whereas numerical integration subroutines are required to computethe Fourier coefficients involved in the exact solutions. The proposed method of this article shows sufficiently accurate con-vergence rate in many cases, yet we do not see a full table of third and fourth order, likely due to the lower order spatialdiscretization and rounding effect. These schemes shall perform well and produce a smooth solution even if the initial datais of low regularity. Computed numerical results for the test problem are in good agreement with the exact solution.
Acknowledgement
The support of King Fahd University of Petroleum and Minerals, Saudi Arabia, is gratefully acknowledged.
References
[1] H. Bateman, Some recent researches on the motion of fluids, Mon. Weather Rev. 43 (1915) 163–170.[2] J.M. Burgers, Mathematical examples illustrating relations occurring in the theory of turbulent fluid motion, Trans. R. Neth. Acad. Sci. Amst. 17 (1939)
1–53.[3] J.M. Burgers, A mathematical model illustrating the theory of turbulence, Advances in Applied Mechanics, vol. I, Academic Press, New York, 1948. pp.
171–199.[4] J.D. Cole, On a quasilinear parabolic equation occurring in aerodynamics, Quart. Appl. Math. 9 (1951) 225–236.[5] E. Gallopoulos, Y. Saad, On the parallel solution of parabolic equations, CSRD Report, University of Illinois, Urbana-Champaigne, 1988, p. 854 (preprint).[6] E. Hopf, The partial differential equation ut þ uux ¼ vuxx, Commun. Pure Appl. Math. 3 (1950) 201–230.[7] _Idris Dag, Dursun Irk, Bülent Saka, A numerical solution of the Burgers’ equation using cubic B-splines, Appl. Math. Comput. 163 (2005) 199–211.[8] A.Q.M. Khaliq, E.H. Twizell, D.A. Voss, On parallel algorithms for semidiscretized parabolic partial differential equations based on subdiagonal Padé
approximations, Numer. Method PDE 9 (1993) 107–116.

M. Yousuf / Applied Mathematics and Computation 205 (2008) 442–453 453
[9] Katsuhiro Sakai, Isao Kimura, A numerical scheme based on a solution of nonlinear advection diffusion equations, J. Comput. Appl. Math. 173 (2005)39–55.
[10] S. Kutluay, A.R. Bahadir, A. Özde�, Numerical solution of one-dimensional Burgers equation: explicit and exact-explicit finite difference methods, J.Comput. Appl. Math. 103 (1999) 251–261.
[11] S. Kutluay, A. Esen, A linearized numerical scheme for Burgers-like equations, Appl. Math. Comput. 156 (2004) 295–305.[12] J.D. Lambert, Numerical Methods for Ordinary Differential Systems, John Wiley & Sons, Chichester, 2000.[13] Mohan K. Kadalbajoo, A. Awasthi, A numerical method based on Crank–Nicolson scheme for Burgers’ equation, Appl. Math. Comput. 182 (2006) 1430–
1442.[14] C. Moler, C. Van Loan, Nineteen dubious ways to compute the exponential of a matrix, twenty-five years later, SIAM Rev. 45 (2003) 3–49.[15] Mustafa Gülsu, A finite difference approach for solution of Burgers’ equation, Appl. Math. Comput. 175 (2006) 1245–1255.[16] Pilwon Kim, Invariantization of the Crank–Nicolson method for Burgers’ equation, Physica D 237 (2008) 243–254.[17] A. Refik Bahadir, A fully implicit finite-difference scheme for two-dimensional Burgers’ equations, Appl. Math. Comput. 137 (2003) 131–137.[18] G.D. Smith, Numerical solution of partial differential equations, third ed., Applied Mathematics and Computation Science Series, Clarendon Press,
Oxford, 1985.[19] Stev M. Serbin, A scheme for parallelizing certain algorithms for the linear inhomogeneous heat equation, SIAM J. Sci. Stat. Comput. 13 (2) (1992) 449–
458.[20] J.W. Thomas, Numerical partial differential equations, finite difference methods, Texts in Applied Mathematics, vol. 22, Springer-Verlag, New York,
1995.[21] V. Thomée, Galerkin finite element methods for parabolic problems, Series Computational Mathematics, vol. 25, Springer-Verlag, Berlin, 1997.[22] D. Voss, A.Q.M. Khaliq, Time-stepping algorithms for semidiscretized linear parabolic PDEs based on rational approximations with distinct real poles,
Adv. Comput. Math. 6 (1996) 353–363.[23] B.A. Wade, A.Q.M. Khaliq, M. Siddique, M. Yousuf, Smoothing with positivity-preserving Padé schemes for parabolic problems with nonsmooth data,
Numer. Method PDE 21 (3) (2005) 553–573.[24] B.A. Wade, A.Q.M. Khaliq, M. Yousuf, J. Vigo-Aguiar, Higher order smoothing schemes for inhomogeneous parabolic problems with applications to
nonsmooth payoff in option pricing, Numer. Method PDE 23 (2007) 1249–1276.[25] B.A. Wade, A.Q.M. Khaliq, M. Yousuf, J. Vigo-Aguiar, R. Deininger, On smoothing of the Crank–Nicolson scheme and higher order schemes for pricing
barrier options, J. Comput. Appl. Math. 204 (2007) 144–158.