-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
1/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
1
Abstract: Motors play an important role in daily lifelike in
industrial manufacturing and in many other applications. Induction
motors are robust, simple, small
in size, low in cost, almost maintenancefree and possess a wide
range of speedscompared to DC motors. However, complexity of signal
processing and poor precision limits its usage. Speed estimation in
an induction motor is very difficult because of its non-linear
dynamic nature. Filed Oriented Control or Vector Control developed
by Blaschke(1972) and Vas (1900) respectively is used in motor
control. But it gives incorrect measurement of flux at low speed
and lacks robustness. It has high drive cost, low reliability and
noise immunity. Also these methodsemploy speed sensors. However,
the algorithm of vector control theory requiresmanipulation of the
electric parameters of the motor so that the governing equations in
rectangular coordinates can be developed, prior knowledge of the
state equations is necessary when the estimation theory is used to
estimate the speed precisely. However, the values of the electric
parameters may deviate from the de
signated values due to changes in the working environment,
temperature, speed, external load and noise. The speed estimation
technique employed here is dependent on expressions obtained from
the induction motor dynamic equations. The equations have
singularity therefore direct speed estimation cannot be employed.
Two ANNs are used here to recover the speed from these two
equations. The two equations are then combined and singularities
are removed. This method is robust and iseasily implementable using
commercially available ANN tools.
1
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
2/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
2
LIST OF FIGURES FIGURE PAGE NO. FIG 1.1 Induction Motorcuit on
Stationary Frame 14 FIG 1.4 Dynamic Equivalent Circuit on Arbitrary
Fra
Axis Equation of Induction Motor..17 FIG 2.1 Numerator Curve
2
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
3/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
3
Table of Contents CERTIFICATE02 ACKNOWLEDGEMENT..03 Anciple
1.1.3 Construction 1.2 Speed of Induction Motor 1.3 Speed Control
of Indu
ction Motor 1.4 Dynamic Nature of Induction Motor 1.4.1 Per
phase equivalent Circuit 1.4.2 Stationary Frame Circuit 1.4.3
Arbitrary Frame Circuit 1.5 d-q Axis Equation 1.6 Characteristic
Equation 2. SPEED FUNCTION 2.1 Speed expression 2.2 Method of
Singular Point 2.2.1 Non-Singularity 2.2.2 Continuity 2.2.3 Square
integrable 223
08 08 08 08 09 09 11 12 14 15 17 17 19 19 21 21 21
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
4/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
4
3. ARTIFICIAL NEURAL NETWORK 3.1 Neural Network 3.2 Definitions
3.3 Function Approximation 3.4 Data 3.5 Training 4. CONCLUSION 5.
REFERENCES 6. APPENDIX
24 24 25 27 27 30 49 50 51
A. MATLAB Command B. Plots
51 52
4
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
5/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
5
CHAPTER 1
INDUCTION MOTOR
1.1 Introduction 1.1.1 Induction Motor Induction motor is the
most popular typeof a.c. motor. It is very commonly used for
industrial drives since it is cheap,robust, efficient and reliable.
It has good speed regulation and high startingtorque. It has a
reasonable overload capacity. Along with variable frequency
ACinverters, induction motors are used in many adjustable speed
applications whichdo not require fast dynamic response. 1.1.2
Principle: It works on the principle of electromagnetic induction.
A rotating magnetic field is produced when a 3-phase supply is
connected to the 3- phase winding of the stator. 1.1.3
Construction: A three phase induction motor consists of mainly two
parts: 1. Stator 2. Rotor The stator is the stationary part and the
rotor is the rotating part. The st
ator is built up of highgrade alloy steel laminations to reduce
eddy current losses. The rotor is also built up of thin laminations
of the same material as stator. The laminated cylindrical core is
mounted directly on the shaft or a spidercarried by the shaft.
There are two types of induction motor rotors: 1. Squirrelcage
rotor 2. Wound rotor
5
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
6/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
6
FIG 1.1
1.2 Speed of induction motor: Induction motor speed is given by
following formula:
Where, v = speed of rotor f = frequency of rotor And, n = number
of poles
1.3 Speed control of induction motor: The main method employed
for speed controlof induction motor are as follows:
1. 2. 3. 4. 5.
Pole changing methods Stator voltage control Supply frequency
control Rotor resistance control Slip energy recovery
6
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
7/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
7
1. Pole changing methods: The number of stator poles can be
changed by amultiple stator windings, bmethods of consequent poles
cpole-amplitude modulation PAM. The met
ds of speed control by pole changing is suitable for cage motors
only because the cage rotor automatically develops number of poles
equal to the poles of the rotor winding.
2. Stator voltage control: The speed of a 3-phase induction
motor can be variedby varying the supply voltage .Torque developed
in induction motor is proportional to square of the supply voltage.
Speed control is obtained by varying the supplying voltage until
the torque required by the load is developed at the
desiredspeed.
3. Variable-frequency control: The synchronous speed of an
induction motor is given by: Ns=120f/P The synchronous speed and,
therefore, the speed of the inducti
on motor can be controlled by varying the supply frequency.
4. Rotor resistance control: The speed of wound induction motor
can be controlled by connecting external resistance in the rotor
circuit through slip rings. This method is not applicable to cage
motors.
7
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
8/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
8
5. Supply energy frequency: In the rotor resistance control,the
slip power in rotor circuit is wasted as I2 R Loss during the low
speed operation. The efficienc
y of the drive system by this Method of speed control is,
therefore, reduced. The slip power from the rotor Circuit can be
recovered and fed back to the a.c. source so as to utilize it
outside the motor. Thus, the overall efficiency of thedrive system
can be increased. This method of speed control is used in large
power applications where variation of speed over a wide range
involves a large amount of slip power.
1.4 Dynamic model of induction motor: The concept of vector
control has opened up a new possibility that induction motors can
be controlled to achieve dynamic performance as good as that of DC
or brushless DC motors. In order to understandan analyze vector
control , the dynamic model of induction motor is necessary .it has
been found that the dynamic model equations developed on a rotating
refer
ence frame is easier to describe the characteristic of induction
motors. It is the objective of the project to derive and explain
induction motor model in relatively simple terms by using the
concept of space vectors and d-q variables .whenwe choose a
synchronous reference frame in which rotor flux lies on the
d-axis,dynamic equations of induction motor is simplified and
analogous to a DC motor.
1.4.1 CONVENTIONAL PER PHASE EQUIVALENT CIRCUIT :
8
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
9/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
9
FIG 1.2 The inductance of rotor and stator is given by:
Inductance of rotor circuit Lr = Llr + Lm Where, Inductance of
stator circuit Ls = Lls + Lm, Where, Lr =
rotor inductance, Llr = rotor leakage inductance, Ls = stator
inductance, Lls =stator leakage inductance, Lm = magnetizing
inductance of motor. If the excitation frequency injected into the
stator is e and the actual speed converted into electrical
frequency unit is o, slip s is defined by,
s = e o e
9
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
10/54
Generated by Foxit PDF Creator Foxit Soft are http:// .foxitsoft
are.com For evaluation only.
10
= r/ e Where r is called the slip frequency, hich is the
frequency of actual rotor current. The po er consumption in stator
circuit is given by, Is2Rs The po er
consumption in rotor circuit and load (output) is given by ,
Ir2Rs/s Torque produced is given by: T =Ir2Rr (P/2)(1-s)/s e
=Ir2Rr(P/2 e) Where P is the no. of poles, although the per-phase
equivalent circuit is useful in analyzing and predicting
steady-state performance, it is not applicable to explain dynamic
performance of the induction motor. In the next section, e ill
develop dynamic model of induction motors in general frame ork and
introduce several equivalent circuits as special cases. With space
vector notation, voltage equations on the statorand rotor circuits
of induction motors are, Vs s = Rs Is s + p s s Vr = Rr Ir + p r0
(1) (2)
It is very convenient to transform actual rotor variables (Vr,
Ir,r) from eqs.2 . ona rotor reference frame into a ne variables (
Vr s, Ir s, r s) on a stator refe
rence frame as in the derivation of conventional steady-state
equivalent circuit. Vs s = Rs Is s + p s s 0 = Rr Ir s + (p - jo) r
s (3) (4)
Where o = p o, is the speed of the motor in electrical fre uency
unit and s s = LsIs s + Lm Ir s r s = Lm Is s + Lr Ir s (5) (6)
1.4.2 DYNAMIC EQUIVALENT CIRCUIT ON STATIONARY REFERENCE
FRAME:
10
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
11/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
11
FIG 1.3 EQUATIONS: It is very convenient to transform actual
rotor variables (Vr,Ir, r) from . on a rotor reference frame into a
new variab
es ( Vr s, Ir s, r s) on
a stator reference frame as in the derivation of conventiona
steady-state equiva
ent circuit. Let the stator to rotor winding turn ratio be n and
the angu
ar
position of the rotor be , and define Ir s = (1/n) exp (j ) Ir,
r s = n exp (j ) r)
Aso, by defining referred rotor impedances as Rr = n2 Rr, etc.,
we have Vs s = R
s Is s + p s s 0 = Rr Ir s + (p - jo) r s (8) (9)
Where o = p o, is the speed of the motor in electrical fre uency
unit and s s = LsIs s + Lm Ir s r s = Lm Is s + Lr Ir s (10)
(11)
The above 4 equations (8-11) constitute a dynamic modeof the
induction motor o
n a stationary (stator) reference frame in space vector form.
These mode
equations may be simp
ified by e
iminating f
ux
inkages as Vs s = (Rs + Ls p) Is s +Lm p Ir s 0 = (Rr + Lr (p -
jo)) Irs + Lm (p - jo) Is s. (12) (13)
From (12-13) , The dynamic equivalent circuit model on a
stationary reference frame can be dra n as in Fig.1.2 For
steady-state operation ith excitation frequency e, p in may be
replaced by je and after some algebraic manipulation, e get11
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
12/54
Generated by Foxit PDF Creator Foxit Soft are http:// .foxitsoft
are.com For evaluation only.
12
Vs s = (Rs + je Ls ) Is s + Lm p Ir s 0 = (Rr/ s + je Lr) Ir s +
je Lm Is s.
(14) (15)
hich exactly describes the conventional steady-state equivalent
circuit of Fig.1.1.
1.4.3 DYNAMIC EQUIVALENT CIRCUIT ON ARBITRARY REFERENCE
FRAME:
FIG 1.4
Equations: No , the previous procedure can be generalized so
that the dynamic model is described on an arbitrary reference frame
rotating at a speed a, here isa special case ith a,= 0 To do that,
define the ne space vector on the arbitrar
y frame as Y a = exp(- ja ) Y s (16)
and reconstruct all the model equations in terms of the ne space
vectors. In the arbitrary reference frame, Eqs are modified to Vs a
= (Rs + Ls p) Is a + Lm pIr a + ja s a (17)12
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
13/54
Generated by Foxit PDF Creator Foxit Soft are http:// .foxitsoft
are.com For evaluation only.
13
0 = (Rr + Lr p) Ir a + Lm p Is a + j (a - o) r a, ith ne flux
linkage equations defined by, s a = Ls Is a + Lm Ir a r a = Lm Is a
+ Lr Ir a As before, by substitut
ing Eqs. into Eqs,
e have Vsa = (Rs + Ls (p + ja)) Is a + Lm (p + ja ) Ir a 0 = (Rr
+ Lr (p + ja - jo)) Ir a + Lm (p + ja - jo) Is a here eliminated
flux linkage variables are eliminated. (21) (19) (20)
(18)
(22)
The generalized equivalent circuit on a arbitrarily rotating
frame based on Eq.is sho n in .. No , depending on a specific
choice of a, many forms of dynamic equivalent circuit can be
established. Among them, the synchronous frame form canbe obtained
by choosing a = e. This form is very useful in describing the
concept
of vector control of induction motors as
ell as of PM synchronous motors because at this rotating frame,
space vector is not rotating, but fixed and have a constant
magnitude in steady-state. Since space vectors in the synchronous
frame ill frequently be used, they are denoted ithout any
superscript indicating the type of frame. Another possible
reference frame used in vector control is the rotor reference frame
by choosing c = o hich is , in fact, the reverse step of . ith n
=1.
1.5 d-q axis equations of induction motor:
13
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
14/54
Generated by Foxit PDF Creator Foxit Soft are http:// .foxitsoft
are.com For evaluation only.
14
FIG 1.5 In many cases, analysis of induction motors ith space
vector model is complicated due to the the fact that e have to deal
ith variables of complex nu
mbers. For any space vector Y, define t
o real quantities Sq and Sd as, S = Sq -j S d . In other ords,
Sq = Re (S) and Sd = - Im (S) illustrates the relationship bet een
d-q axis and complex plane on a rotating frame ith respect to
stationary a-b-c frame. Note that d- and q-axes are defined on a
rotating reference frame at the speed of a = p a ith respect to
fixed a-b-c frame. Fig. 3.1 Definition of d-axis and q-axis on an
arbitrary reference frame ith the above definitioncan be translated
into the follo ing 4 equations of real variables expressed ina
matrix form.
1.6 Characteristic equation:
The d-q axis dynamic equations for the squirrel cage induction
motor are given b
y [l]
14
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
15/54
Generated by Foxit PDF Creator Foxit Soft are http:// .foxitsoft
are.com For evaluation only.
15
V = AI (1)
here, In the above equations, subscript s denotes stator
quantities, r denotesrotor quantities, q and d refer to the
quadrature and direct axis quantities respectively and L, is the
magnetizing inductance.
CHAPTER-215
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
16/54
Generated by Foxit PDF Creator Foxit Soft are http:// .foxitsoft
are.com For evaluation only.
16
SPEED FUNCTION
2.1 Speed Expression: If the stator voltages and stator currents
are kno
n along ith the machine parameters. We have only three unkno ns
r , ird and irq . We can thus solve for r (speed of induction
motor) in terms of stator quantities only.First , e obtain the
rotor currents as function of stator quantities and r ,from the
first t o ro s of characteristic equation . since the rotor
currents are not accessible in a squirrel cage induction motor .
the expressions for ird and irq are obtained as:
ird= 1/Lm [(Vsd-Rsisd)dt- Lsisd]
irq=1/Lm[(Vsq-Rsisq)dt-Lsisq]
We can substitute ird and irq in the last t o ro s of
characteristic equation and obtain the equations of rotor speed r
as: r = -[2disd/dt RrLsisd + RrVxddt + LrVxd
] /[2isq+Lr
Vxqdt] Where,
2=Lm2-LrLs, Vxd=Vsd-Rsisd, Vxq=Vsq-Rsisq The speed can berecover
from this equation directly but due to singularities in this
function it
is difficult to calculate speed for regular induction motor
operation.
16
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
17/54
Generated by Foxit PDF Creator Foxit Soft are http:// .foxitsoft
are.com For evaluation only.
17
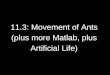
FIG 2.1
FIG 2.2
It can be seen from the above figures of numerator and
denominator functions that both aveforms are in phase, resulting in
simultaneous zero-crossings, and hence singular points. Hence e
cannot obtain the speed of induction motor directly. So for
calculating the speed of induction motor e use artificial neural
net ork.
17
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
18/54
Generated by Foxit PDF Creator Foxit Soft are http:// .foxitsoft
are.com For evaluation only.
18
2.1 METHOD OF SINGULAR POINTS : One of the necessary conditions
for an ANN to approximate a function is that the function should be
square integrable, non-linea
r, singular and continuous.
2.1.1 Non singularity: A square matrix is nonsingular if Ax = 0n
implies x = 0n.Other ise it is a singular matrix Properties of
singular matrix: 1.A nn is nonsingular if and only if r(A) = n. 2.A
is nonsingular if and only if A has a linearinverse A1.
2.1.2 Continuity:
FIG 2.3
A continuous function is a function for which, intuitively,
small changes in the
input result in small changes in the output continuity of a
function in the following intuitive terms: an infinitesimal change
in the independent variable corresponds to an infinitesimal change
of the18
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
19/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
19
dependent variable .We call a function continuous, if, and only
if, it is continuous at every point of its domain. More generally,
we say that a function is con
tinuous on some subset of its domain if it is continuous at
every point of thatsubset. 2.1.3 S uare integrable: A real or
complex
valued function of a real or
complex variable is s uare
integrable on an interval if the integral of the s uare of its a
absolute value, over that interval, is finite.
The basic idea in this method is to partition the main speed
function having singularities into smaller function which do not
have any singularities , and to train small ANNs to identify these
smaller functions. The desired output can be obtained from the
outputs of these ANNs by avoiding the singular points of the
mainfunctions. In this case one of the simplest ways to partition
the functions is to consider their numerators and denominators
separately.
N1=
[2disd/dt
RrLsisd+RrVxddt+LrVxd]
D1= 2is +LrVx
dt
ANNs can be trained to approximate N1 and D1. The output of
these ANNs can then bepassed through a filter which performs the re
uired division at points where both the numerators and denominators
are non
zero. Inputs given to the numerator ANN are:
Isd,disd/dt,vsd,vsddt and isddt Input given to thedenominator ANN
are: vs
,vs dt and is
dt
19
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
20/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
20
Block diagram of ANN
FIG 2.4
CHAPTER
320
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
21/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
21
NEURAL NETWORK
3.1 Neural Network An Artificial Neural Network (ANN) is an
information processing paradigm that is inspired by the way
biological nervous systems, such as thebrain, process information.
The key element of this paradigm is the novel structure of the
information processing system. It is composed of a large number of
highly interconnected processing elements (neurons) working in
unison to solve specific problems. ANNs, like people, learn by
example. An ANN is configured for aspecific application, such as
pattern recognition or data classification, through a learning
process. Learning in biological systems involves adjustments to
thesynaptic connections that exist between the neurons. This is
true of ANNs as well.
Use Neural networks, with their remarkable ability to derive
meaning from compli
cated or imprecise data, can be used to extract patterns and
detect trends thatare too complex to be noticed by either humans or
other computer techni ues. A trained neural network can be thought
of as an "expert" in the category of information it has been given
to analyse. This expert can then be used to provide projections
given new situations of interest and answer "what if" uestions.
Other advantages include: 1. Adaptive learning: An ability to learn
how to do tasks based on the data given for training or initial
experience. 2. Self
Organisation: An ANN can create its own organisation or
representation of the information it receives during learning time.
3. Real Time Operation: ANN computations may be carried out in
parallel, and special hardware devices are being designed and
manufactured which take advantage of this capability. 4. Fault
Tolerance via RedundantInformation Coding: Partial destruction of a
network leads to the correspondingdegradation of performance.
However, some network capabilities may be retained
even with major network damage.
21
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
22/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
22
FIG 3.1
3.2 Definitions:
Feed forward network: Feed
forward networks have the following characteristics:1.
Perceptrons are arranged in layers, with the first layer taking in
inputs andthe last layer producing outputs. The middle layers have
no connection with theexternal world, and hence are called hidden
layers. 2. Each perceptron in one layer is connected to every
perceptron on the next layer. Hence information is constantly "fed
forward" from one layer to the next., and this explains why
thesenetworks are called feed
forward networks. 3. There is no connection among perce
ptrons in the same layer.
Feedback Network: By using loops in the network, Feedback
networks transfer sign
als in both directions. Feedback networks are powerful and
complex. Feedback networks state is changing dynamically until they
reach an e uilibrium point. Untilthe input changes, they remain at
the e uilibrium point. Feedback architecturesare called as
interactive or recurrent
Back propagation: It is a supervised learning method, and is an
implementation of the Delta rule. It re uires a teacher that knows,
or can calculate, the desired output for any given input. It is
most useful for feed
forward networks (netwo
rks that have no feedback, or simply, that have no connections
that
22
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
23/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
23
loop). The term is an abbreviation for "backwards propagation of
errors". Back propagation re uires that the activation function
used by the artificial neurons
(or "nodes") is differentiable.
FIG 3.2
Supervised learning: Supervised learning incorporates an
external teacher, so that each output unit is told what its desired
response to input signals ought tobe. During the learning process
global information may be re uired. Paradigms ofsupervised learning
include error
correction learning, reinforcement learning a
nd stochastic learning. An important issue concerning supervised
learning is theproblem of error convergence, i.e. the minimisation
of error between the desired and computed unit values. The aim is
to determine a set of weights which minimizes the error.
Neuralwares Predict: NeuralWorks Predict is an integrated,
state
of
the
art tool for rapidly creating and deploying prediction and
classification applications. Predict combines neural network
technology with23
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
24/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
24
genetic algorithms, statistics, and fuzzy logic to automatically
find optimal ornear
optimal solutions for a wide range of problems. Predict
incorporates years
of modeling and analysis experience gained from working with
customers faced with a wide variety of analysis and
interpretationproblems. Predict re uires no prior knowledge of
neural networks. With only minimal user involvement it addresses
all the issues associated with building robust models from
available empiricaldata. Predict analyzes input data to identify
appropriate transforms, partitions the input data into training and
test sets, selects relevant input variables,and then constructs,
trains, and optimizes a neural network tailored to the problem. For
advanced users, Predict also offers direct access to all key
training and network parameters. 3.3 FUNCTION APPROXIMATION When
input data originates from a function with real
valued outputs over a continuous range, the neural networ
k is said to perform a traditional function approximation. An
example of an approximation problem could be one where the
temperature of an object is to be deter
mined from secondary measurements, such as emission of
radiation. Another more trivial example could be to estimate shoe
size based on a persons height. These two examples involve models
with one input and one output. A more advanced model of the second
example might use gender as a second input in order to derive a
more accurate estimate of the shoe size.
3.4 DATA FOR NEURAL NETWORK TRAINING: Induction motor parameters
used in simulation work: Parameters Stator resistance Rotor
resistance Stator inductance Rotorinductance Magnetizing inductance
Symbol Rs Rr Ls Lr Lm Value 0.49 0.45 0.0388mH 0.0354mH
0.0354mH
24
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
25/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
25
Numerator X1 9.54 8.9 9.3 9.1 10.1 10.5 9.5 8.4 9.4 8.3 8.7 8.5
9.6 10.4 10.9 11.1 11.5 11.8 11.3 11.4 11.7 12.3 12.5 12.8 12.6
12.4 12.9 13.2 13.4 13.6 X2 7.8
8.7 8.4 8.2 9.3 9.4 8.9 8.6 10.1 10.5 10.8 10.7 8.5 9.2 9.8 10.3
10.2 10.7 10.410.6 9.6 11.2 11.3 11.6 11.4 11.7 11.5 12.1 12.5 13.8
X3 4.9 4.79 2.51 1.52 2.341.21 2.4 1.59 4.5 4.4 4.35 3.4 2.9 2.5
2.4 2.1 2.12 1.9 1.8 1.6 2.1 2.5 2.4 2.24.35 4.45 4.5 4.9 5.2 5.35
X4 6.8 6.34 3.23 2.45 1.9 0.78 1.75 2.34 6.7 6.54 6.48 6.3 2.41 1.8
0.6 0.45 0.4 0.35 0.32 0.3 0.4 0.5 2.1 2.8 6.4 6.6 6.8 7.1 7.5 7.9
X5 5.1 5.31 7.13 7.81 8.12 9.89 8.3 7.9 4.98 4.95 5.1 5.15 7.9 8.5
10.15 13.515.1 15.9 16.8 17.5 14.5 13.2 10.5 9.9 5.2 5.1 4.9 3.9
3.5 3.2 N1
2.111
1.870.02 0.562 0.84 1.7761 0.961 0.6287
2.0787
2
1.94
1.82 0.54 0.97 1.87 2.695
3.0669 3.2732 3.4882 3.6583 2.93 2.5905 1.28 0.84011.889
2.005
2.1413
2.51
2.789
3.0403
X1=disd/dt ,X2=isd, X3=Vsd, X4=Vsddt, X5=isddt
25
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
26/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
26
Y1 80.9 70.8 90.4 99.3 120 130.1 140.3 120.25 135.55 112.9 115.7
132.7 122.5 134.45 145.85 129.89 124.6 127.7 154.85 149.65 148.43
152.35 145.76 155.91 143.87 1
56.24 165.34 130.5 135.9 141.95
Y2 46.27 69.13 70 113 130 204 127 93 95 100 98 97.5 88 102 131.1
153 160 161 154168 149 156 101 84 137 136 134 130 125 120
Y3 700 610 138 120 108 98 100 91 490 460 425 390 130 125 116 110
108 116 112 133140 175 137 128 390 394 402 410 416 420
D10.0105
0.00813 0.000072 0.00193 0.00275 0.00553 0.00278 0.001722
0.00513
0.004440.00391
0.0033 0.000892 0.00144 0.00263 0.00354 0.0038 0.003719
0.0035
4 0.00365 0.00285 0.00251 0.001219 0.000785
0.00189
0.00201
0.00214
0.002510.00279
3.04403
Y1=dis /dt, Y2=Vs dt, Y3=is
dt
26
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
27/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
27
3.5 TRAINING STEPS FOR NEURAL NETWORK:
27
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
28/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
28
28
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
29/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
29
29
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
30/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
30
30
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
31/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
31
31
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
32/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
32
32
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
33/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
33
33
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
34/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
34
34
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
35/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
35
35
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
36/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
36
36
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
37/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
37
37
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
38/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
38
38
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
39/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
39
39
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
40/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
40
40
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
41/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
41
41
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
42/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
42
42
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
43/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
43
43
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
44/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
44
44
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
45/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
45
45
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
46/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
46
CONCLUSION:
This project outlines techni
ue for speed estimation of induction motor using artificial
neural networks. The dynamic model of induction motor is considered
andexpression for rotor speed is obtained . The expression obtained
have singularities thus ANNs cannot be used to obtain the speed
directly from speed function. Amethod is used in this project in
which two ANNs are trained to approximate thenumerator and the
denominator functions in the speed expression. By training such
ANNs and using a filter to avoid singular points , the speed can be
recovered .
REFERENCES: 1. Electrical Machinary by A.E. Fitzgerald. 2.
Electric Machines byAshfa Hussain. 3. Control System Engineering by
I. J. Nagrath and M. Gopal46
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
47/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
47
4. Dynamic model of induction motors for vector control Dal Y.
Ohm, Drivetech Inc., Blacksburg,Virginia. 5. Speed Estimation Of
Induction Motor Using Artificial Ne
ural Networks by Prashant Mehrotra, John E. Quaicoe and R.
Venkatesan. 6. Motor Speed Identification Via Neural Network by
L.Ben Brahim. 7. Neural Network Documentation by Wolframesearch. 8.
www.google.com 9. www.wikipedia.com 10. Neuralware predict
APPENDIX:
A. MATLAB COMMANDS:
>> y1= [80.9 70.8 90.4 99.3 120 130.1 140.3 120.25 135.55
112.9 115.7 132.7 122.5 134.45 145.85 129.89 124.6 127.7 154.85
149.65 148.43 152.35 145.76 155.91 143.87 156.24 165.34 130.5 135.9
141.95];
47
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
48/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
48
>> y2= [46.27 69.13 70 113 88 102 131.1 153 137 136 134
130 >> y3= [700 130 390610 125 394 138 116 402 120 110
410
130 160 125 108 108 416
204 127 161 154 120]; 98 100 116 112 420];
93 168
95 149
100 156
98 101
97.5 84
91 133
490 140
460 175
425 137
390 128
>> d1= 0.12*(10^ 9)*y1+0.0354*(10^ 3)*y2 0.01734*(10^
3)*y3; >> plot(d1); >> x1=[9.54 8.9 9.6 10.4 12.6 12.4
>> x2=[7.8 8.5 11.4 >> x3=[4.9 2.9 4.35 >>
x4=[6.82.41 6.4 >> x5=[5.1 7.9 5.2 8.7 9.2 11.7 4.79 2.5 4.45
6.34 1.8 6.6 5.31 8.5 5.1 9.3 10.9 12.9 8.4 9.8 11.5 2.51 2.4 4.5
3.23 0.6 6.8 9.1 11.1 13.2 8.2 10.3 12.1 1.52 2.1 4.9 2.45 0.45 7.1
10.1 11.5 13.4 9.3 10.2 12.5 2.34 2.12 5.2 1.9 0.47.5 8.12 15.1 3.5
10.5 9.5 11.8 11.3 13.6]; 9.4 8.9 10.7 10.4 13.8]; 1.21 2.4 1.9 1.8
5.35]; 0.78 0.35 7.9]; 9.89 15.9 3.2 1.75 0.32 8.4 11.4 9.4 11.7
8.3 12.38.7 12.5 8.5 12.8
8.6 10.6
10.1 9.6
10.5 11.2
10.8 11.3
10.7 11.6
1.59 1.6
4.5 2.1
4.4 2.5
4.35 2.4
3.4 2.2
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
49/54
2.34 0.3
6.7 0.4
6.54 0.5
6.48 2.1
6.3 2.8
7.13 7.81 10.15 13.5 4.9 3.9
8.3 16.8
7.9 17.5
4.98 14.5
4.95 13.2
5.1 10.5
5.15 9.9
>> n1=
(
0.12*10^(
9)*x1
0.03474*10^(
3)*x2+0.0354*x3+0.45*x4
0.22*x5); >> wr=n1./d1; >> plot(wr)
B. PLOTS:
48
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
50/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
49
Numerator plot
49
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
51/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
50
Denominator plot
50
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
52/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
51
Speed plot
51
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
53/54
Generated by Foxit PDF Creator Foxit Software
http://www.foxitsoftware.com For evaluation only.
52
52
-
8/2/2019 of Induction Motor Using Artificial Neural Network and
Implementation in MATLAB
54/54