Embed Size (px)
Citation preview

April 20, 2023
Keith FrancoisCNRS
Continuity of the stack of tasks under discrete scheduling operations
Francois Keith (CNRS-UM2 LIRMM, France – CNRS-AIST JRL, UMI3218/CRT Japan)
Pierre-Brice Wieber (INRIA Rhône-Alpes, France)
Nicolas Mansard (CNRS-LAAS, France)
Abderrahmane Kheddar(CNRS-UM2 LIRMM, France – CNRS-AIST JRL, UMI3218/CRT Japan)
Continuity of the Stack of Tasks under discrete scheduling operations
Keith Francois
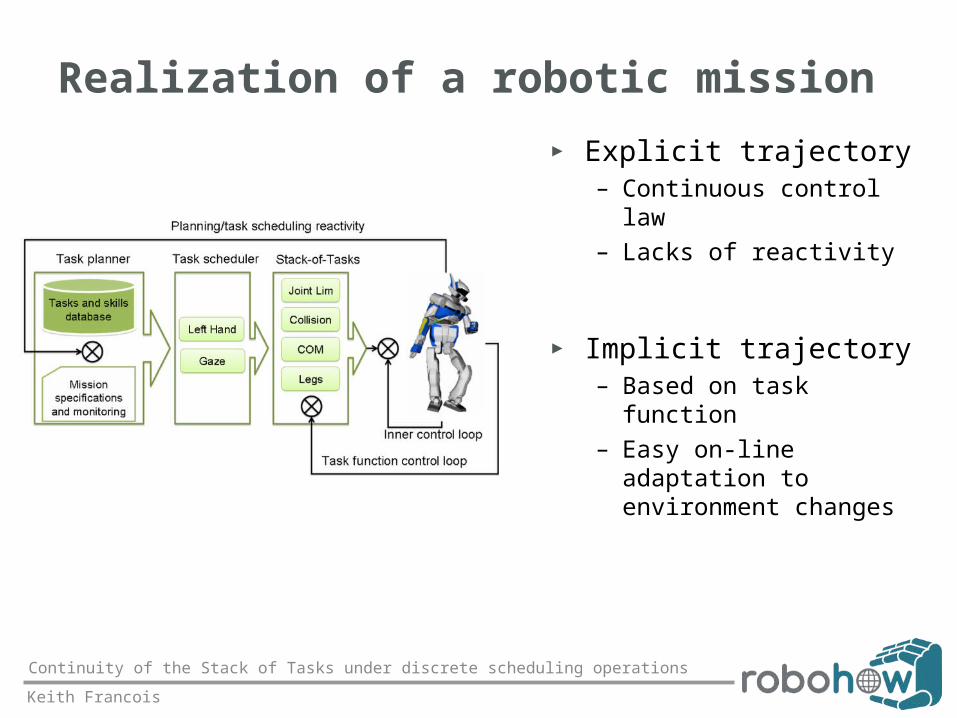
Realization of a robotic mission
► Explicit trajectory – Continuous control law– Lacks of reactivity
► Implicit trajectory– Based on task function– Easy on-line adaptation
to environment changes

Continuity of the Stack of Tasks under discrete scheduling operations
Keith Francois
Task Function
► Defined by three elements:– A task space
(error between current and desired sensor values)– A reference behavior of the error
– A Jacobian
► Regulation of the error
q= J + e *
SensorSensor
- +
[Samson91]
Continuity of the Stack of Tasks under discrete scheduling operations
Keith Francois
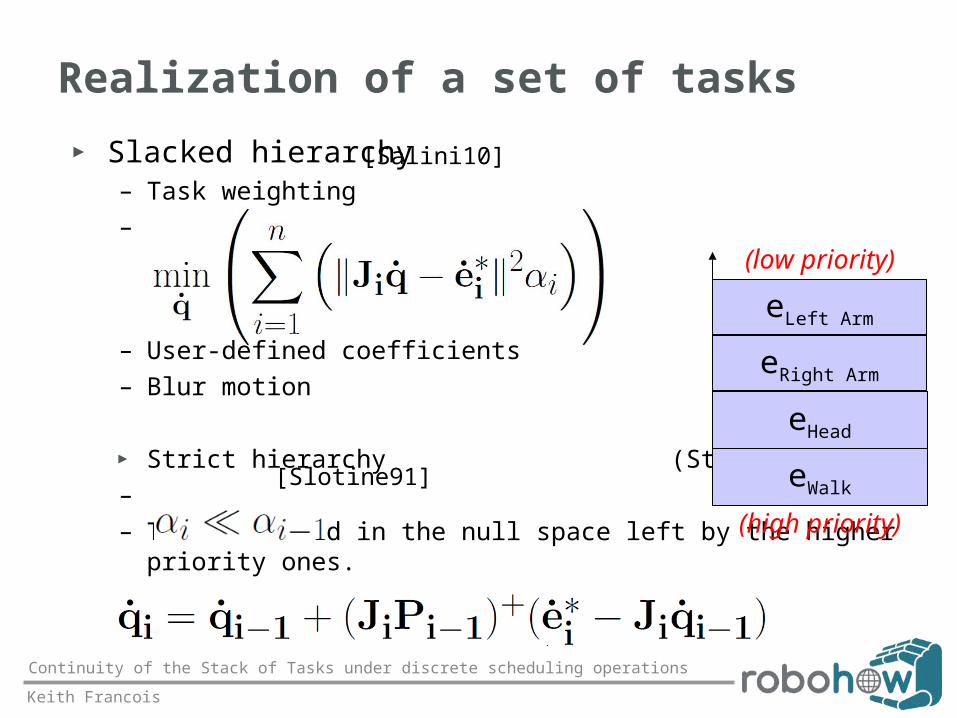
Realization of a set of tasks
► Slacked hierarchy – Task weighting–
– User-defined coefficients– Blur motion
► Strict hierarchy (Stack of tasks)– – Task realized in the null space left by the higher priority ones.
eWalk
eHead
eRight Arm
eLeft Arm
[Salini10]
[Slotine91]
(high priority)
(low priority)
Continuity of the Stack of Tasks under discrete scheduling operations
Keith Francois
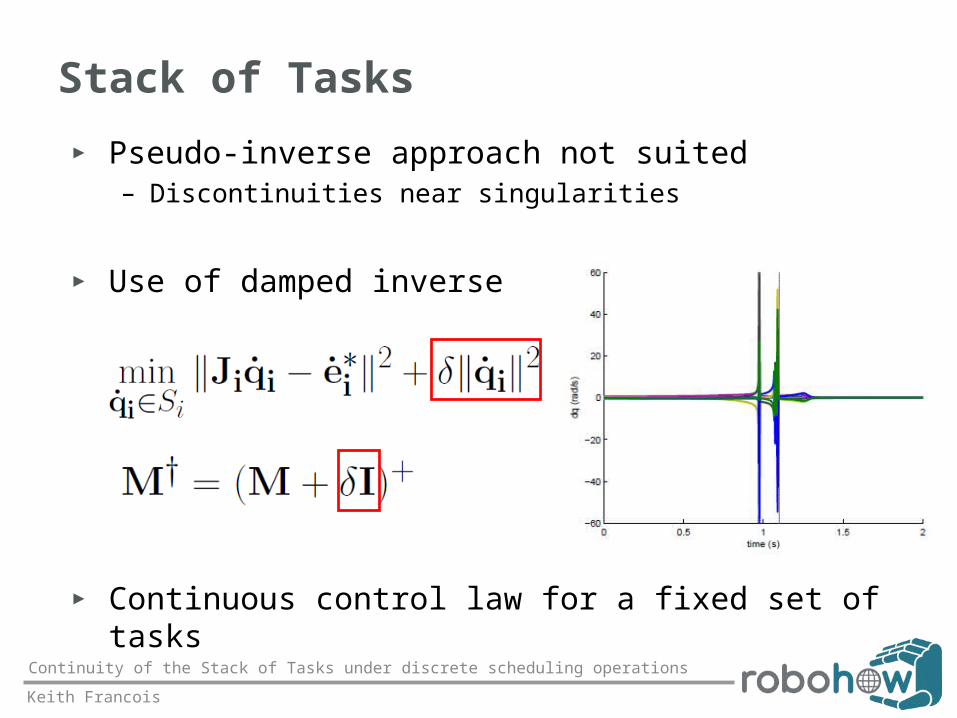
Stack of Tasks
► Pseudo-inverse approach not suited– Discontinuities near singularities
► Use of damped inverse
► Continuous control law for a fixed set of tasks

Continuity of the Stack of Tasks under discrete scheduling operations
Keith Francois
Event related discontinuities
► Discontinuity due to– Additional control value– Change of null space
for lower priority tasks
Smoothing methods– Additional control insertion gain– Null space ?
eWalk
eHead
eRight Arm
eLeft Arm

Continuity of the Stack of Tasks under discrete scheduling operations
Keith Francois
Swap-based approach
► Operation between neighbouring tasks– Insertion and removal only
at the end of the stack– Pairewise swaps
eWalk
eRight Arm
eLeft Arm
eWalk
eRight Arm
eLeft Arm
eWalk
eRight Arm
eLeft Arm
eWalk
eRight Arm
eLeft Arm
eHead
eHead
eHead

Continuity of the Stack of Tasks under discrete scheduling operations
Keith Francois
Swap process
► 2-task layer (without damping)
eWalk
era
eHead
eLeft Arm
eWalk
eLeft Arm
eWalk
eLeft Arm
eHead
eRight Arm
eRight Arm
eHead
Swap phase
1-0+

Continuity of the Stack of Tasks under discrete scheduling operations
Keith Francois
Swap process
► 2-task layer (without damping)► At the limits ( ), the two following problems are
equivalent.–
(control law during the swap)
–
(control law corresponding to a strict hierarchy)
► Continuity at the limits if there is no damping process.
[Van Loan 84]

Continuity of the Stack of Tasks under discrete scheduling operations
Keith Francois
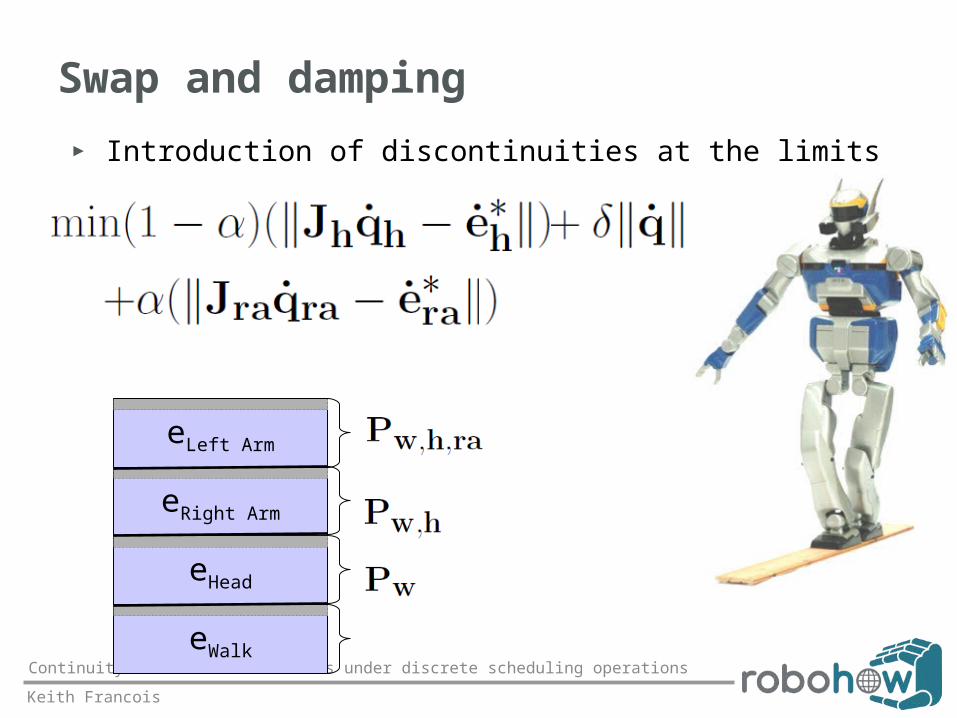
Swap and damping
► Introduction of discontinuities at the limits
eWalk
eLeft Arm
eHead
eRight Arm
Continuity of the Stack of Tasks under discrete scheduling operations
Keith Francois
Swap and damping
► Introduction of discontinuities at the limits
eWalk
eLeft Arm
eHead
eRight Arm
Continuity of the Stack of Tasks under discrete scheduling operations
Keith Francois
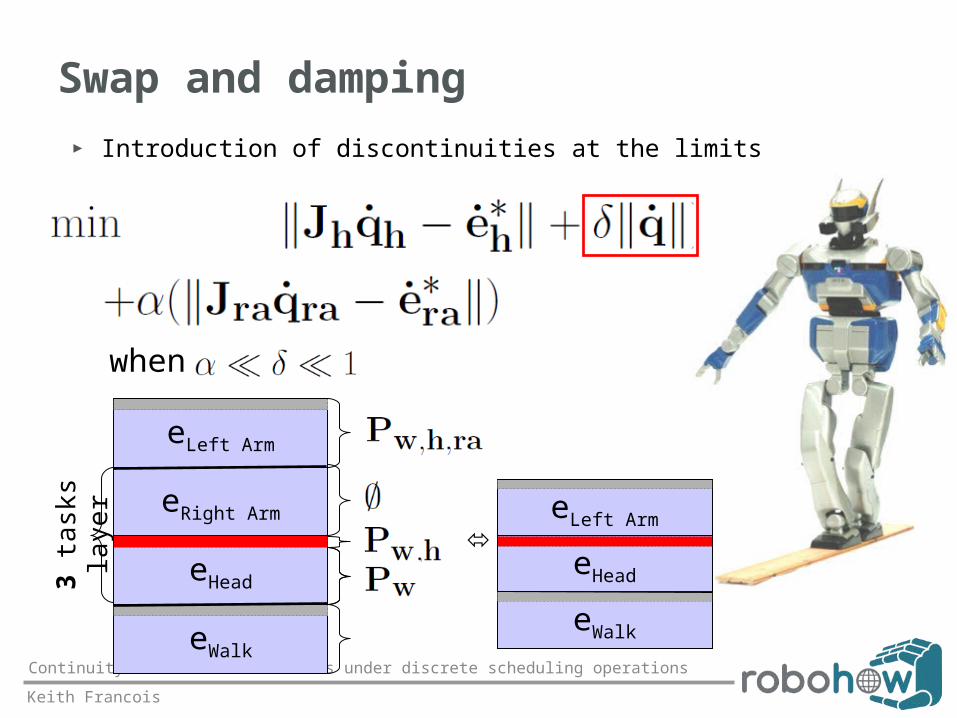
Swap and damping
► Introduction of discontinuities at the limits
eWalk
eLeft Arm
eHead
eWalk
eLeft Arm
eHead
eRight Arm
3 ta
sks
laye
r
when
Continuity of the Stack of Tasks under discrete scheduling operations
Keith Francois
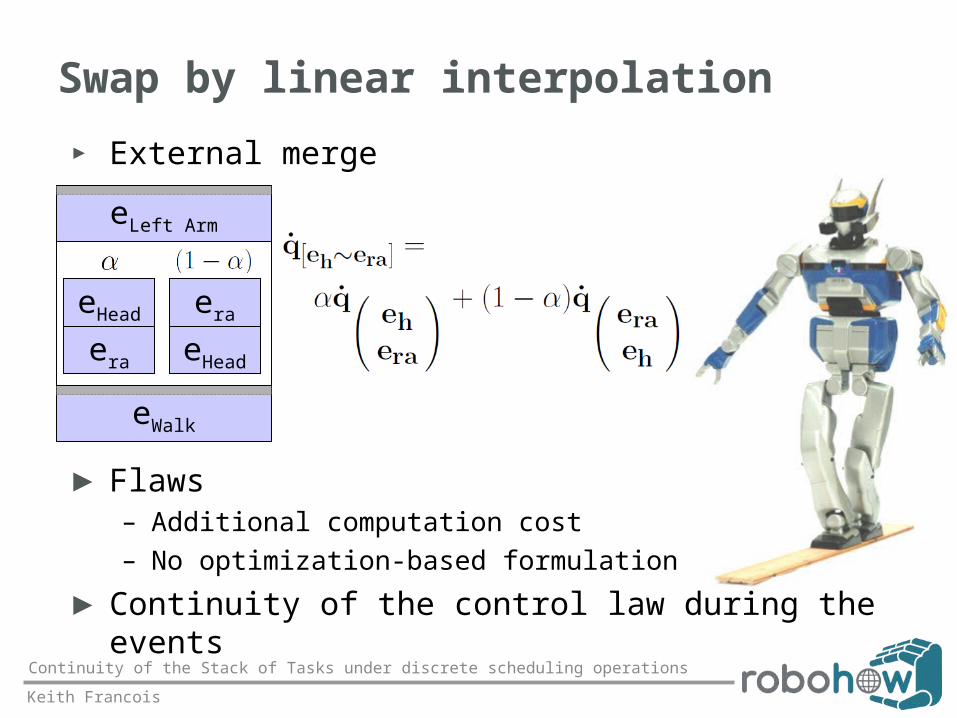
Swap by linear interpolation
► External merge
eWalk
eLeft Arm
eHead
era
era
eHead
►Flaws– Additional computation cost– No optimization-based formulation
►Continuity of the control law during the events
Continuity of the Stack of Tasks under discrete scheduling operations
Keith Francois
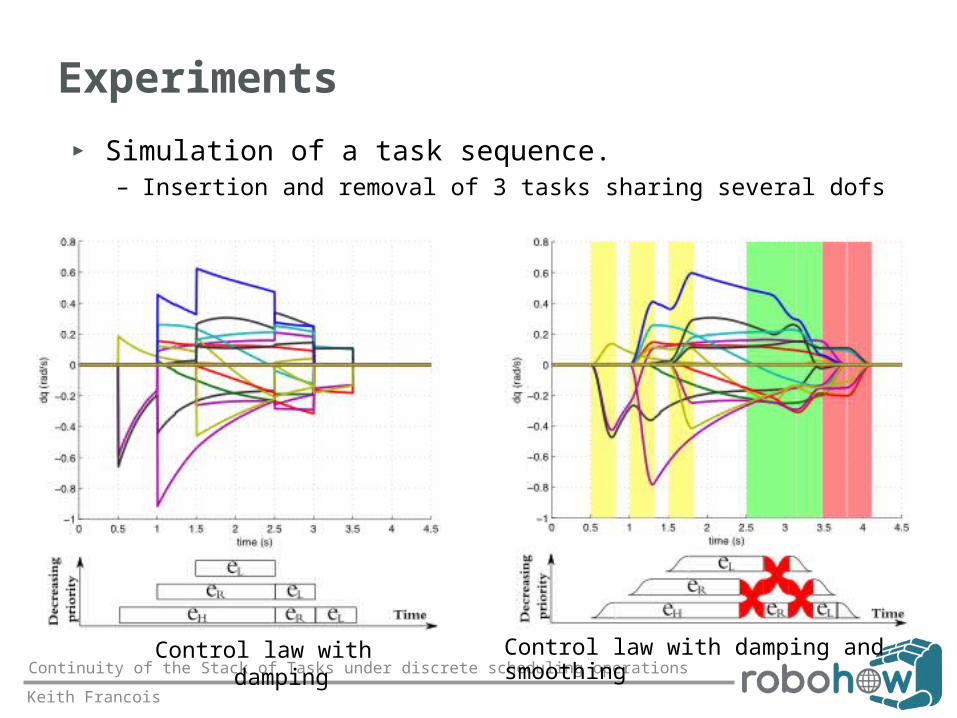
Experiments
► Simulation of a task sequence.– Insertion and removal of 3 tasks sharing several dofs
Control law with damping Control law with damping and smoothing
Continuity of the Stack of Tasks under discrete scheduling operations
Keith Francois
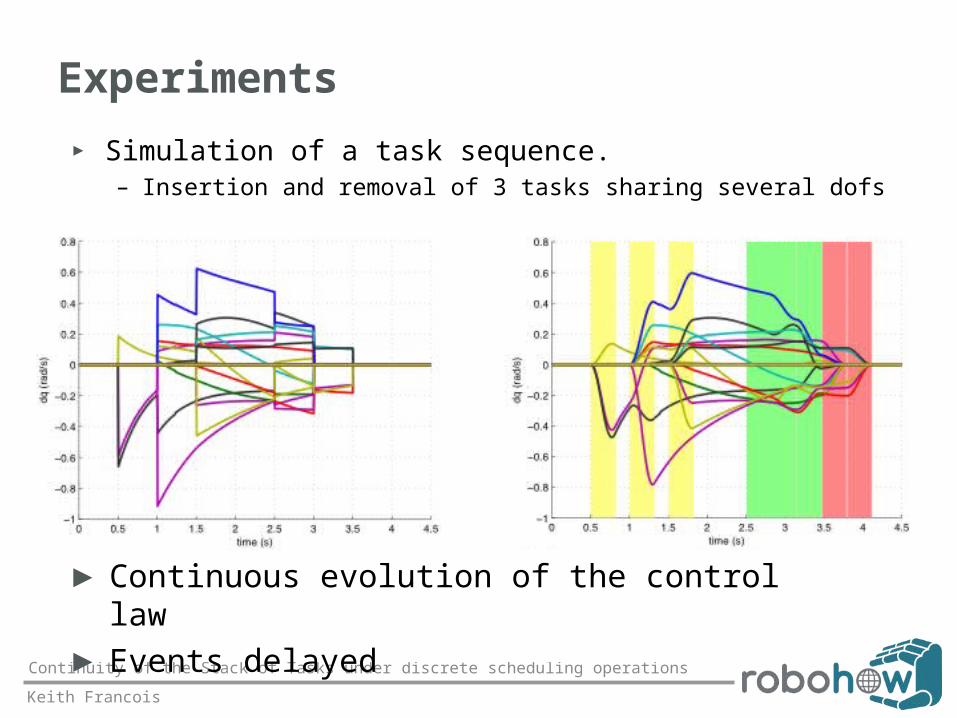
Experiments
► Simulation of a task sequence.– Insertion and removal of 3 tasks sharing several dofs
►Continuous evolution of the control law►Events delayed
Continuity of the Stack of Tasks under discrete scheduling operations
Keith Francois
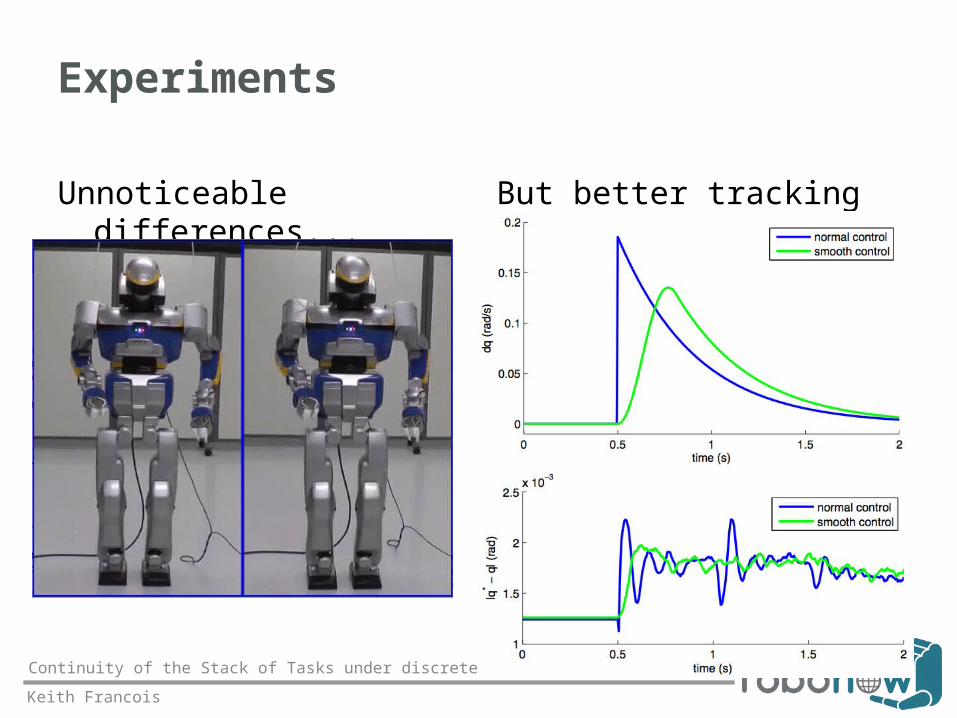
Experiments
Unnoticeable differences... But better tracking results
Continuity of the Stack of Tasks under discrete scheduling operations
Keith Francois
Conclusion and Perspectives
► Conclusion+ Continuous control law during the events– Time consuming– Compromise between reactivity and continuity.
► Perspective– Dynamic inverse control– Test stability issues

Continuity of the Stack of Tasks under discrete scheduling operations
Keith Francois
Realization of a robotic mission
► Explicit trajectory – Continuous control law– Lacks of reactivity
► Implicit trajectory– Based on task function– Easy on-line adaptation
to environment changes– Possible discontinuity of
the control law