-
8/13/2019 Numerical Modeling of Neutron Flux
1/121
NUMERICAL MODELLING OFNEUTRON FLUX IN NUCLEAR
REACTORS
Bachelors Thesis
submitted by
Milan Hanus
completed at
Department of MathematicsFaculty of Applied Sciences
University of West Bohemia
under supervision of
Ing. Marek Brandner, Ph.D.
Pilsen, June 2007
-
8/13/2019 Numerical Modeling of Neutron Flux
2/121
Declaration
I hereby declare that this Bachelors Thesis is the result of my
own work and that allexternal sources of information have been duly
acknowledged.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
Milan Hanus
-
8/13/2019 Numerical Modeling of Neutron Flux
3/121
Abstract in English
The aim of this thesis is to develop an efficient method that
describes neutron distribu-tion within a reactor. The method is
based on neutron transport equation which can bederived from
physical foundations presented at the beginning of the thesis. By
using a
general balance principle, an accurate albeit overly complex
neutron transport equation isobtained from the derivation.
Simplications are discussed next and lead to a two-groupsystem of
steady state diffusion equations. An eigenvalue problem is then
formulated forthe established boundary value problem whose dominant
eigenpair is the critical numberof the reactor and a corresponding
neutron ux distribution. Application of reactor criti-cality
calculations in the area of fuel reloading optimization is
explained. The eigenvalueproblem is solved by the power method in
which the dominant eigenvector is determinedby solving a set of
algebraic equations arising from nite-volume discretization scheme.
Toobtain a sufficiently accurate solution on a coarse hexagonal
assembly mesh, the standardnite-volume method is rened by a nodal
method based on a special transverse integrationprocedure. For
solving the one-dimensional diffusion problems arising from the
procedure,semi-analytic method is employed. The resulting numerical
scheme is then benchmarkedon a model VVER-1000 type reactor
conguration. Improvement directions are discussedat the end.
Keywords:nuclear reactor, reactor physics, neutron transport
equation, neutron balance, neutron dif-fusion equation, two-group
approximation, reactor criticality, eigenvalue problem,
powermethod, nite volume method, CMFD system, neutron ux, neutron
current, nodal method,transverse integration, semi-analytic method,
hexagonal assembly, fuel reloading optimiza-
tion.
-
8/13/2019 Numerical Modeling of Neutron Flux
4/121
Abstrakt v ce stin e
V praci je navrzena efektivn metoda pro popis rozlozen neutronu
v jadernem reaktoru,vych azejc z transportn rovnice neutronu.
Teoretick y prehled reaktorove fyziky v druhekapitole slouz k pops
an velicin potrebn ych pro odvozen teto rovnice. Pro prakticke
vypocty je vsak obecn y transportn model prlis slozit y, a tak
pr ace pokracuje jeho difuzndvougrupovou aproximac ve stacion arnm
rezimu. Pro vzniklou okrajovou ulohu difuzeneutronu je d ale
formulov ana uloha na vlastn csla, jejz dominantn resen popisuje
tzv.kriticke cslo reaktoru a prslusne rozlozen neutronov ych toku.
V pr aci je blze rozebr anaaplikace tohoto v ysledku na problem
optimalizace palivov ych vs azek. Dominantn vlastncslo je hled ano
iterativn mocninnou metodou, pricemz prslusn y vlastn vektor je v
kazdemkroku zsk an resenm soustavy rovnic sestavene na z aklade
diskretizace dane okrajoveulohy. Tu je mozne provest napr. metodou
konecn ych objemu, avsak pro potreby conejvernejsho popisu
neutronov ych toku v reaktoru s sesti uhelnkov ymi kazetami je
nutnoklasicky konecne-objemov y prstup zpresnit. K tomu je v pr aci
pouzita tzv. nod aln metodasest ava jc ze speci aln prcne integrace
difuznch rovnic a n asledneho semi-analytickehoresen vznikl ych
jednorozmern ych problemu. V ysledkem je efektivn a presn a
numerick ametoda, jez je v z averu pr ace otestov ana na modelove
palivove konguraci reaktoru typuVVER-1000. Pr ace je zakoncena
prehledem moznost jejho vylepsen.
Klcova slova: jaderny reaktor, reaktorov a fyzika, transportn
rovnice neutronu, neutronov a bilance, di-fuzn rovnice neutronu,
dvougrupov a aproximace, kriticke cslo reaktoru, uloha na
vlastncsla, mocninn a metoda, metoda konecn ych objemu, CMFD
soustava, neutronove toky,neutronove proudy, nod aln metoda, prcn a
integrace, semi-analytick a metoda, sesti-
uhelnkov a palivova kazeta, optimalizace palivove vsazky.
-
8/13/2019 Numerical Modeling of Neutron Flux
5/121
Acknowledgements
I would like to thank my supervisor Ing. Marek Brandner, Ph.D.,
for his constant sup-port and guidance throughout the course of
thesis preparation. Without his insight, myunderstanding of the
subject would never reach present levels. I would also like to
thank
Ing. Roman Kuzel, Ph.D., for his invaluable advises on
implementation of the methods inMATLAB. Finally, I am gratefull to
all who had patience with me in times when progressbecame slow and
time-consuming.
-
8/13/2019 Numerical Modeling of Neutron Flux
6/121
i
Contents
List of Symbols iii
List of Figures xviii
1 Introduction 11.1 Motivation . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . 11.2 Problem description . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.3
Overview of solution methods . . . . . . . . . . . . . . . . . . .
. . . . . . 21.4 Organization of the thesis . . . . . . . . . . . .
. . . . . . . . . . . . . . . 3
2 Physical background 52.1 Notation . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 52.2 Basic concepts .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
2.3 Neutron-nuclei interactions . . . . . . . . . . . . . . . .
. . . . . . . . . . . 72.3.1 Neutron properties . . . . . . . . . .
. . . . . . . . . . . . . . . . . 72.3.2 Quantifying interactions .
. . . . . . . . . . . . . . . . . . . . . . . 82.3.3 Types of
reactions . . . . . . . . . . . . . . . . . . . . . . . . . . .
92.3.4 Fission . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 102.3.5 Radiative capture . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 13
2.4 Chain Reaction . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 15
3 Mathematical model 173.1 Neutron transport theory . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 17
3.1.1 Neutron transport equation . . . . . . . . . . . . . . . .
. . . . . . 173.1.2 Steady state formulation . . . . . . . . . . .
. . . . . . . . . . . . . 253.1.3 Conditions on angular ux . . . .
. . . . . . . . . . . . . . . . . . . 263.1.4 Criticality
calculations . . . . . . . . . . . . . . . . . . . . . . . . .
27
3.2 Neutron diffusion theory . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 283.2.1 Basic assumptions . . . . . . . . . . .
. . . . . . . . . . . . . . . . 283.2.2 Neutron diffusion equation
. . . . . . . . . . . . . . . . . . . . . . . 293.2.3 Diffusion
conditions on ux and current . . . . . . . . . . . . . . . 31
3.3 Multigroup approximation . . . . . . . . . . . . . . . . . .
. . . . . . . . . 333.3.1 Two group model . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 36
-
8/13/2019 Numerical Modeling of Neutron Flux
7/121
ii CONTENTS
4 Numerical solution 394.1 Overview . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 39
4.2 Discretization . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 424.2.1 Spatial domain discretization . . . .
. . . . . . . . . . . . . . . . . 424.2.2 Discretization of the
nodal balance relation . . . . . . . . . . . . . . 46
4.3 Finite volume scheme . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 504.3.1 Basic assumptions . . . . . . . . . . .
. . . . . . . . . . . . . . . . 504.3.2 Approximation of integral
averages of neutron currents . . . . . . . 504.3.3 Numerical
properties . . . . . . . . . . . . . . . . . . . . . . . . . .
564.3.4 Solution procedure . . . . . . . . . . . . . . . . . . . .
. . . . . . . 57
4.4 Nodal methods . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 594.4.1 Modication of the FV scheme . . . . . .
. . . . . . . . . . . . . . 594.4.2 Two-node subdomain problems . .
. . . . . . . . . . . . . . . . . . 614.4.3 Numerical properties .
. . . . . . . . . . . . . . . . . . . . . . . . . 754.4.4 Solution
procedure . . . . . . . . . . . . . . . . . . . . . . . . . . .
76
5 Numerical results 795.1 Model problem . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . 795.2 Solution procedure
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 795.3
Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 82
5.3.1 = 0.5, at leakage approximation . . . . . . . . . . . . .
. . . . . 835.3.2 = 0.5, quadratic leakage approximation . . . . .
. . . . . . . . . . 855.3.3 = 0.125, at leakage approximation . . .
. . . . . . . . . . . . . . 87
5.3.4 = 0.125, quadratic leakage approximation . . . . . . . . .
. . . . 896 Conclusion 91
6.1 Summary . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 916.2 Further research . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . 92
-
8/13/2019 Numerical Modeling of Neutron Flux
8/121
iii
List of Symbols
Usage guideline
The list of letters used throughout the text is divided into two
categories: those writtenin Roman script and those in Greek script.
The entries are sorted alphabetically in eachcategory, and the page
where they rst appear in the text is displayed after each item. If
some letter is used with different meanings in different chapters,
a remark is made just afterits statement. Letters not used beyond
rst few lines after their denition are normally notlisted. If the
letter denotes some quantity for which there is a numbered denition
relationin the text, the equation number is referenced after the
description of the quantity.
Dependency of functions is written in terms of variables used in
the place of their rstappearance. Transport theory functions are in
the text rst presented in a general time-dependent form and this
dependence is later removed by the assumption of steady
state(section 3.1.2). Basic meaning of both forms of the function
is preserved, however, sothe list includes only the general
time-dependent functions for the sake of brevity. If forany other
reason two different symbols share the same meaning (e.g. due to
omission of some indices that became redundant under additional
assumptions), they are separated bysemicolon but make one entry in
the list.
The table of general non-letter symbols follows. For greater
clarity, auxiliary letters areused together with symbols of
universal meaning (e.g. of an operation applicable to anyarbitrary
function). The letters are:
a , b any arbitrary vectors
q an arbitrary function
W an arbitrary domainIn addition to explanations of indexed
letters in the above mentioned lists, commonly
used indices are also enumerated separately in the next two
tables (for subscripts, resp.superscripts). Listing of acronyms
concludes the summary.
-
8/13/2019 Numerical Modeling of Neutron Flux
9/121
iv List of Symbols
Roman letters
A atomic mass . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
A 22 matrix given by R P . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . 71a 0, a1, a2 21 vectors of the
rst, second, resp. third expansion coefficients (foreach group) of
the particular solution of transverse integrated ODE 69a 3, a4 21
vectors of the integration constants (for each group) in the
homo-geneous solution of the transverse integrated ODE . . . . . .
. . . . . . . . . . . 69B k 22 matrices used in the semi-analytic
method (eq. 4.94) . . . . . . . . 71C ; C i 2 2 auxiliary matrix
for the relationship between ux and current atthe same interface (
(4.101a) or (4.101b)) . . . . . . . . . . . . . . . . . . . . . . .
. . . 7 2D(r , E ) diffusion coefficient (eq. 3.34) . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
CD gi, coupling correction factors for current approximations .
. . . . . . . . . . . . 59
C D 2N 2N matrix of nodal coupling correction factors. . . . . .
. . . . . . . . . 61D g(r ); Dg group-discretized diffusion
coefficient (eq. 3.45) . . . . . . . . . . . . . . . . . . . .
35
D gi discrete value of diffusion coefficient homogenized over
node V i . . . . . 51D gi, approximations of diffusion coefficients
at interfaces between two nodes
in the directions (eq. (4.394.41)) . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 53D 22 matrix of group diffusion
coefficients . . . . . . . . . . . . . . . . . . . . . . . . . 69E
neutron energy . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . 7
E k kinetic energy of a neutron . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 11
E energy of neutrons not belonging to the balance set . . . . .
. . . . . . . . . . . 19
e x , eu , ev; e unit vectors in local hexagonal directions . .
. . . . . . . . . . . . . . . . . . . . . . . . 45
e 21 vector with even constants for the denition (4.97) of x . .
. 72e J 21 vector with even constants for the denition (4.98) of J
x . . . . 72f (x) transverse leakage shape function (eq. 4.86) . .
. . . . . . . . . . . . . . . . . . . . . 6 7
G 22 diagonal matrix of boundary condition coefficients g . . .
. . . . . 74
-
8/13/2019 Numerical Modeling of Neutron Flux
10/121
List of Symbols v
G number of energy groups . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 33
h width of a node . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
J gi, numerical approximation of positively oriented
face-averaged currentacross any arbitrary face of node V i . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
J i, nite volume approximation of neutron current averaged over
face i, (eq. 4.27) . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
53
CJ gi, corrected nite volume approximation of neutron current
averaged overface i, (eq. 4.52) . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
J gi,x approximation of transversly averaged currents at i,x . .
. . . . . . . . . . 66
J x ; J i,x 2 2 auxiliary matrix for the relationship between ux
and current atthe same interface ( (4.101a) or (4.101b)) . . . . .
. . . . . . . . . . . . . . . . . . . . . 7 2J x ; J i,x 2 1
vectors of transverse averaged currents (for each group) at
sidesi,x (eq. 4.98) . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . 72 j gi,x ,
j
gi,u , j
gi,v ; j
gi, positively oriented face-averaged currents across the
respective faces of node V i (eq. 4.8) . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . 47
j gi,
positively oriented face-averaged current across any arbitrary
face of node V i (eq. 4.9) . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
j(r , E, , t ) transport theory expression for for neutron
current ( angular neutron current ) (eq. 3.4) . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . 19
j(r , E ) diffusion theory expression for neutron current
(angularly independentnet neutron current ) (eq. 3.24) . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
jg(r ) group-discretized neutron current (eq. 4.1) . . . . . . .
. . . . . . . . . . . . . . . . . . 4 2
K eff numerically computed value of keff . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . 57
keff effective multiplication constant . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 16
lgi, face-averaged net leakage across the two edges perp. to
direction . 48
lgi total area-averaged neutron leakage across the transverse
boundaries of node V i (eq. 4.8) . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
48
lgt,i (x) transverse leakage term (repr. neutron leakage across
transverse bound-aries at point x, integrated over the transverse
cross section at thatpoint) . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . 63
-
8/13/2019 Numerical Modeling of Neutron Flux
11/121
vi List of Symbols
lgi (x) transverse leakage term of the 1D diffusion equation for
transverse av-eraged ux . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
65
Lgi nite volume approximation of total average leakage out of
node V i (anapproximation of lgi ) (eq. 4.42) . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . 57
CLgi, corrected nite volume approximation of the face-averaged
net neutroncurrent (average leakage) across faces perpendicular to
the -direction(eq. (4.564.58)) . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
60
CLgi,y t approximate leakage through transverse boundaries yt,i
(x), averagedover the area of the node . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 65Lgi (x)
approximation of l
gi (x) . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . 65
Lgi approximate leakage through transverse boundaries,
integrally averagedover all transverse cross sections of the node
along the x-axis (Lgi (x)averaged over the width of the node) . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Lgi, nite volume approximation of the face-averaged neutron
leakage in the -direction (eq. (4.394.41)) . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . 55
L g N N matrix of average neutron leakages . . . . . . . . . . .
. . . . . . . . . . . . . . 57C L g N
N matrix of average neutron leakages, approximated using the
corrected (nodal) scheme . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 61
L (x); L i(x) 2 1 vector of average transverse leakages in
respective groups . . . . 69M 2N 2N neutron migration matrix . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57C M 2N
2N neutron migration matrix with leakage components approxi-mated
by corrected (nodal) scheme . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 61M number of rows in the nodal mesh . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
M number of core rows in direction . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . 76
me edge length (eq. 4.3) . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . 46
mN node area (eq. 4.4) . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . 46
N (in Chap. 2) number of nuclei in a unit volume of a sample . .
. . . . . . . . . . . . . . . . . . . . 8
N (in Chap. 4) total number of nodes (assemblies) in the reactor
. . . . . . . . . . . . . . . . . . 44
N (r , E, , t ) transport theory expression for the elementary
number of neutrons ( an-gular neutron density ) . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. 18
-
8/13/2019 Numerical Modeling of Neutron Flux
12/121
-
8/13/2019 Numerical Modeling of Neutron Flux
13/121
viii List of Symbols
sgt,i (x) transverse integrated neutron sources density in group
g . . . . . . . . . . . 63
S
gi approximate group sources density, integrally averaged over
all trans-verse cross sections of the node along the x-axis (S gi
(x) averaged over
the wid th o f the node) . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . 66
S f 2N 2N ssion sources matrix . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . 57T a mesh of hexagonal nodes
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . 42t time variable . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . 18
u local spatial variable (direction) associated to a node
V neutron balance domain . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 20v local spatial
variable (direction) associated to a node
v speed of a neutron (a scalar) . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 9
v (E ) velocity of a neutron (a vector) . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 17
V i an arbitrary reference node . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 44x local spatial
variable (direction) associated to a node (identied with
the Cartesian x-direction)
x ij point with Cartesian coordinates [ xi , y j ] . . . . . . .
. . . . . . . . . . . . . . . . . . . . . 4 3
yt,ij (x); yt,i (x); yt (x)a function representing the top
boundary of node V i (centered at pointx ij ) (eq. 4.2) . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 43
Z atomic number . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
-
8/13/2019 Numerical Modeling of Neutron Flux
14/121
List of Symbols ix
Greek letters
albedo constant (a ratio of the number of neutrons escaping the
coreand the number entering it through the same point) (eq. 3.20) .
. . . . 27
p(E ) energy spectrum of prompt ssion neutrons . . . . . . . . .
. . . . . . . . . . . . . . . 12
p(r , E E, ); (r , E E, )transport theory expression for the
energetic spectrum of prompt ssionn e u t r o n s . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . 2 1
1
4 (E
E ) diffusion theory expression for the energy spectrum of ssion
neutrons
(normalized isotropic ssion spectrum ) . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . 2 8
g group-discretized ssion spectrum (eq. 3.43) . . . . . . . . .
. . . . . . . . . . . . . . 34
d(E ) energy spectrum of delayed ssion neutrons . . . . . . . .
. . . . . . . . . . . . . . . . 12
convergence criterion for the eigenvalue updating method . . . .
. . . . . . 58
neutron ux (eq. 2.2) . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . 9
(r , E, , t ) transport theory expression for neutron ux (
angular neutron ux )
(eq. 3.2) . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
19
g(r ); g group discretized neutron ux (eq. 3.44) . . . . . . . .
. . . . . . . . . . . . . . . . . . . 34
(r , E ) diffusion theory expression for neutron ux (angularly
independent total ux density ) (eq. 3.23) . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
28
[1(r ), 2(r )]i i-th eigenvector of the two-group criticality
problem . . . . . . . . . . . . . . . 37
gi numerical approximation of the integral average of ux over
node V i(eq. (4.23)) . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
50gi integral average of ux over node V i (eq. 4.6) . . . . . . . .
. . . . . . . . . . . . . . 46gi,x + numerical approximation of the
integral average of ux over face i,x +
52
gt,i (x) transverse integrated neutron ux (eq. 4.66) . . . . . .
. . . . . . . . . . . . . . . . 63
gi (x) inexact version of gi (x) . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
gi (x) transverse averaged neutron ux (eq. 4.69) . . . . . . . .
. . . . . . . . . . . . . . . . 6 4
-
8/13/2019 Numerical Modeling of Neutron Flux
15/121
x List of Symbols
gi approximate ux, integrally averaged over all transverse cross
sectionsof the node along the x-axis (gi (x) averaged over the
width of the node)
66 i 21 column vector of ux averages for node V i and both
groups . . 70 g N 1 column vector of ux averages for all nodes and
groups . . . . . 57 x ; i,x 2 2 auxiliary matrix for the
relationship between ux and current atthe same interface ( (4.101a)
or (4.101b)) . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2 (x); i(x) 21 vector of transverse averaged uxes in respective
groups (the com-plete solutions to the transverse integrated ODE) .
. . . . . . . . . . . . . . . . . 69 h (x) 21 vector of the
homogeneous solutions (for each group) of the trans-verse
integrated ODE. . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . 69 p(x) 21 vector of the
particular solutions (for each group) of the transverseintegrated
ODE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . 69 x ; i,x 21 vectors of
transverse averaged uxes (for each group) at sides i,x (eq. 4.97) .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 72 boundary condition
coefficient (eq. 3.40) . . . . . . . . . . . . . . . . . . . . . .
. . . . . 3 3
i,x , i,u , i,v ; i, faces of node V i . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . 44 criticality parameter (eigenvalue of the associated
eigenvalue problem
(4.1)) (eq. 3.21) . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
i i-th eigenvalue of the two-group criticality problem . . . . .
. . . . . . . . . . . 37
1 smallest eigenvalue of the two-group criticality problem (
principal eigen-value ) . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . 38
average number of neutrons released by ssion. . . . . . . . . .
. . . . . . . . . . . 12
p (resp. d) average number of prompt (resp. delayed) neutrons
released by ssion12
p(r , E ); (r , E ) transport theory expression for prompt ssion
neutrons yield . . . . . . 20
the whole core domain . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 42
unit direction vector of neutron movement . . . . . . . . . . .
. . . . . . . . . . . . . . 17
direction vector of neutrons not belonging to the balance set .
. . . . . . 19
-
8/13/2019 Numerical Modeling of Neutron Flux
16/121
List of Symbols xi
macroscopic cross section . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 8
(in Chap. 4) any arbitrary face of a given node . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . 45
(in Chap. 2) microscopic cross section . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
macroscopic cross section for an arbitrary reaction . . . . . .
. . . . . . . . . . . . 9
(r , E , t ) transport theory expression for a general
macroscopic cross section . 19
g N N matrix of cross sections substituted by . . . . . . . . .
. . . . . . . . . . 5 7a (resp. a ) microscopic (resp. macroscopic)
cross section for neutron absorption 10
a (r , E , t ) transport theory expression for the macroscopic
absorption cross section23
ga (r ); ga group-discretized absorption cross section (eq.
3.45) . . . . . . . . . . . . . . . 35
f (resp. f ) microscopic (resp. macroscopic) cross section for
ssion . . . . . . . . . . . . . 8
f (r , E , t ) transport theory expression for the ssion cross
section . . . . . . . . . . . . 21
gi,f discrete value of the ssion cross section for node V i (eq.
4.14) . . . . . 49 gf (r );
gf group-discretized ssion cross section (eq. 3.45) . . . . . .
. . . . . . . . . . . . . . 3 5
gr (r ); gr total neutron removal cross section (eq. 3.47) . . .
. . . . . . . . . . . . . . . . . . . 36
gi,r discrete value of the neutron removal cross section for
node V i (eq. 4.12)49s (resp. s ) microscopic (resp. macroscopic)
cross section for scattering . . . . . . . . . 9
s (r , E E, , t )transport theory expression for the macroscopic
scattering cross section(differential scattering cross section )
(eq. 3.1) . . . . . . . . . . . . . . . . . . . . . . 1 9
s (r ,E , t ) transport theory expression for the macroscopic
scattering cross sectionwithout the explicit mentioning of energy
and direction change . . . . 23
12i,s discrete value of the neutron in-scatter cross section for
node V i (eq. 4.13)49 g gs (r ); g gs cross section for neutron
scattering from group g into group g (group-
discretized in-scatter cross section) (eq. 3.45) . . . . . . . .
. . . . . . . . . . . . . . 35
gs (r ); gs cross section for neutron scattering from group g
into any energy group(group-discretized out-scatter cross section)
(eq. 3.45) . . . . . . . . . . . . . 35
-
8/13/2019 Numerical Modeling of Neutron Flux
17/121
xii List of Symbols
14 s (r , E E ) diffusion theory expression for the differential
scattering cross section(normalized isotropic ssion spectrum . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . 29 a symbol
representing either of the node-wise spatial variables x, u, v
44
-
8/13/2019 Numerical Modeling of Neutron Flux
18/121
List of Symbols xiii
Symbols
a b dot product of vectors a , b . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 19 operator nabla :
formally = ( x , y , z ) in Chap. 3, = ( x , y ) inChap. 4 . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . 23
0 N N zero matrix . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . 57 a separator
between the integration symbols and the d E d symbolspecifying the
balance neutrons. . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 20dE elementary (differential) energy range. .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
dE d differential subset of neutron phase space describing
neutrons involvedin the balance relation ( balance neutrons ) . . .
. . . . . . . . . . . . . . . . . . . . . . . 2 0
d elementary (differential) solid angle . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . 18
dr elementary (differential) spatial volume . . . . . . . . . .
. . . . . . . . . . . . . . . . . . 18
d integration symbol for line integrals over a face . . . . . .
. . . . . . . . . . . . . . 45
dS differential surface element (a scalar value) . . . . . . . .
. . . . . . . . . . . . . . . . 19dS oriented differential surface
element (a vector) . . . . . . . . . . . . . . . . . . . . . 19
dt elementary (differential) time interval. . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . 18
q k(x), q l(x) inner product def. by eq. (4.90) . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . 70
U-235 isotope
AZX nuclide
W boundary of some domain W Q numerical approximation of
quantity q
q (r , . . .) W , q (W )limit of function q as r approaches W
from inside, resp. outside of W )
q integral average of quantity q over a node
q integral average of quantity q over all transverse cross
sections of a nodealong the x-axis
-
8/13/2019 Numerical Modeling of Neutron Flux
19/121
xiv List of Symbols
q (x) integral average of quantity q over a transverse cross
section of a nodeat point x
q integral average of quantity q over a faceqt time partial
derivative of function q
qx ,
qy ,
qz spatial partial derivatives of q
-
8/13/2019 Numerical Modeling of Neutron Flux
20/121
List of Symbols xv
Subscripts
placeholder for an arbitrary reaction type (ssion, absorption,
scatter-ing)
a absorption
x, u, v; indices of nodal faces, perpendicular to the x, u and v
(coll. ) directions(respectively), with positive (plus sign), resp.
negative (minus sign)orientation with respect to that direction
f ssion
h homogeneous solution of ODE
i, k linear index of a node
i 1/ 2, i + 1 / 2 index of point lying on the left, resp. right
face of node V ii + 1 index of node adjacent to V i in a positive
x-directioni x, i u, i v; i indices of neighbouring nodes of V i j
row index of nodal mesh
n index representing relation to normal vector n
p (in Chap. 4) particular solution of ODE
p (in Chap. 2, 3) related to prompt ssion neutrons
s scattering
t for denoting transverse integrated quantities, also used in
the symbolfor transverse prole function
x, u, v denote quantities oriented in x, u, resp. v
directions
a placeholder for either of the indices x, u, v
denotes the matrix innity norm
-
8/13/2019 Numerical Modeling of Neutron Flux
21/121
xvi List of Symbols
Superscripts
excited state of a nuclide
C prescript to symbolize quantities approximated by the
nodal-correctedscheme
g index of actual energy group
1 related to fast energy group
2 related to thermal energy group
g index of some group different from the actual group g (also
summationindex over energy groups)
( ) iteration index
-
8/13/2019 Numerical Modeling of Neutron Flux
22/121
List of Symbols xvii
Acronyms
ANC-HM A dvanced N odal C ode for H exagonal Geometry using
ConformalM apping . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
82
ANM A nalytic N odal M e t h o d . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . 4 1
CMFD C oarse M esh F inite D ifference . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 61
FDM F inite D ifference M ethod . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . 39
FV F inite V olume . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
GET G eneralized E quivalence T heory . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . 40
NEM N odal E xpansion M ethod . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 41
ODE ordinary differential equation . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 40
PDE P artial D ifferential E quation . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 33
PWR P ressurized Light- W ater-Moderated and Cooled R eacto r. .
. . . . . . . . . 1
VVER V oda-V odyanoi E nergetichesky R eaktor (Russian term for
the pressur-
ized water reactor) . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . 2
-
8/13/2019 Numerical Modeling of Neutron Flux
23/121
xviii List of Symbols
-
8/13/2019 Numerical Modeling of Neutron Flux
24/121
xix
List of Figures
2.1 Proton and neutron potentials . . . . . . . . . . . . . . .
. . . . . . . . . . 62.2 Binding energy per nucleon . . . . . . . .
. . . . . . . . . . . . . . . . . . 72.3 Fission spectrum of prompt
neutrons for U-235 . . . . . . . . . . . . . . . 122.4 Energetic
dependence of ssion cross section . . . . . . . . . . . . . . . . .
14
3.1 Position and movement direction of neutrons . . . . . . . .
. . . . . . . . . 18
4.1 Hexagonal node with its dimensions . . . . . . . . . . . . .
. . . . . . . . . 434.2 A core domain composed of 163 nodes . . . .
. . . . . . . . . . . . . . . 444.3 Nodal neighbourhood . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 45
5.1 Reactor loading map . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 805.2 Table of material constants (from ref.
[Wag89]) . . . . . . . . . . . . . . . 805.3 Sparsity of power
iteration matrix . . . . . . . . . . . . . . . . . . . . . . .
815.4 Legend for power densities maps . . . . . . . . . . . . . . .
. . . . . . . . . 825.5 Normalized power densities and relative
errors ( = 0.5, at leakage) . . . 835.6 Node-wise power
distribution prole ( = 0.5, at leakage) . . . . . . . . . 835.7
Eigenvalue convergence ( = 0.5, at leakage) . . . . . . . . . . . .
. . . . 845.8 Convergence of correction factors ( = 0.5, at
leakage) . . . . . . . . . . . 845.9 Normalized power densities and
relative errors ( = 0.5, quadratic leakage) 855.10 Node-wise power
distribution prole ( = 0.5, quadratic leakage) . . . . . . 855.11
Eigenvalue convergence ( = 0.5, quadratic leakage) . . . . . . . .
. . . . . 865.12 Convergence of correction factors ( = 0.5,
quadratic leakage) . . . . . . . 865.13 Normalized power densities
and relative errors ( = 0.125, at leakage) . . 87
5.14 Node-wise power distribution prole ( = 0.125, at leakage) .
. . . . . . . 875.15 Eigenvalue convergence ( = 0.125, at leakage)
. . . . . . . . . . . . . . . 885.16 Convergence of correction
factors ( = 0.125, at leakage) . . . . . . . . . . 885.17
Normalized power densities and relative errors ( = 0.125, quadratic
leakage) 895.18 Node-wise power distribution prole ( = 0.125,
quadratic leakage) . . . . 895.19 Eigenvalue convergence ( = 0.125,
quadratic leakage) . . . . . . . . . . . . 905.20 Convergence of
correction factors ( = 0.125, quadratic leakage) . . . . . . 90
-
8/13/2019 Numerical Modeling of Neutron Flux
25/121
1
Chapter 1
Introduction
1.1 Motivation
The eld of nuclear power plant engineering is a good example of
usefulness of mathematicalmodelling. Reactors nd their use not only
in power plants but also in naval and spacetransportation, medical
industry or materials testing, therefore a thorough understandingof
processes occuring in them is of great concern. Mathematical models
play an importantrole in effective nuclear reactor design, control
of its smooth operation or assessment of various malfunctions and
accidents. Specically, this thesis chooses as a model problem
theoptimal fuel reloading strategy, which requires many long-term
test runs of the reactor for
different fuel loading patterns a task clearly needing computer
simulations to accomplish.The most important part of the reactor is
its core. It consists of a set of assembliesloaded with fuel,
control mechanisms and cooling material. There, during an event
called ssion , a great amount of energy is released. To produce
more energy, each ssion eventcan under suitable conditions trigger
another in a process called chain reaction . Sincethe essential
ingredients in ssion chain reaction are the neutrons , the exact
knowledge of their distribution and movement throughout the reactor
core is sought. The mathematicalmodel that provides this
information is based on the neutron transport equation .
1.2 Problem descriptionThe fuel reloading problem will be
studied for pressurized water reactors (PWR). Fuelassemblies
powering these reactors consist mainly of rods loaded with slightly
enricheduranium. During a run of the reactor, ssions continually
occur in the assemblies and resultin conversion of uranium into
products that cant be ssioned anymore the assembliesare burning up.
The process of fuel depletion doesnt occur spatially uniformly
within thecore and is directly dependent on neutron distribution in
each assembly. After a periodof a so called fuel cycle , the core
will contain assemblies with various levels of depletion some will
have to be replaced completely by fresh fuel while the others will
have to be
-
8/13/2019 Numerical Modeling of Neutron Flux
26/121
2 1 Introduction
moved to places where they would contribute to power production
more effectively 1.This operation changes the overall reactivity of
the reactor and adjustment of the distri-
bution of neutron absorbers becomes necessary as well. The new
core conguration mustpreserve the best possible performance and
meet various operational and safety regulationsfor the course of
next fuel cycle. Fuel reloading has thus form of a constrained
discreteoptimization problem.
To evaluate reactor effectivity for a particular assembly
arrangement, a tunable param-eter is introduced to the transport
equation. As we wish to know a long-term behaviour of a reactor
congured according to the selected strategy, a steady-state
solution is sought. Itturns out that there exists only one value of
the parameter for which a physically plausible,non-trivial solution
exists. This value species how the quantity varied by the
parameterhas to be changed in order to ensure the steady state
operation. The associated solutiondescribes the neutron
distribution (or ux ) within the steady core and may then be
furtherused to calculate power production of each assembly. The
uniformity of power distributionis a crucial safety issue since
high power levels may result in temperature increases beyondthe
cooling ability of the surrounding coolant.
Mathematically, previous paragraph describes an eigenvalue
problem for the steady-state neutron transport equation. It must be
solved for each loading pattern found bythe optimization method.
Since there is a huge number of arrangement possibilities 2,the
solving eigenpair must be found rapidly. Development of a method
that satises thisrequirement is subject of this thesis.
1.3 Overview of solution methods
The problem as described in previous section features a solution
of neutron transportequation. In its full generality, it is a
complicated integrodifferential equation which isextremely
difficult to solve. Hence for practical computations some
simplications must bemade. Often used is the diffusion
approximation in which the accurate transport theoryis replaced by
approximate diffusion theory. Diffusion formulation consists of a
parabolicpartial differential equation describing the neutron
balance at each point in the core anda constitutive relation called
Ficks law. In general, the energetic dependence of
neutrondistribution is discretized into so called groups and a
system of multigroup diffusion equa-tions arises as a result. In
this work, a two group model is considered and a steady
state,time-independent solution is sought, hence two coupled
elliptic differential equations willbe solved.
Analytical solution to these equations may be found only in some
special cases. For realsituations, numerical methods have to be
employed. Apart from statistical Monte-Carloapproach based on
simulating collision probabilities for individual neutrons and
atoms,
1for instance, fuel cycle for the Temelin power plant spans one
year; 1 / 4th of assemblies are replacedduring a refuelling process
([ CEZ])
2e.g. the PWR reactor of type VVER-1000 used in Temelin contains
163 assemblies ([ CEZ])
-
8/13/2019 Numerical Modeling of Neutron Flux
27/121
1.4 Organization of the thesis 3
deterministic methods are also popular for reactor analyses.
Their representatives are e.g.the nite-difference method, the
nite-elements method or the nodal method .
Monte-Carlo methods are still too computationally expensive for
the given problem.Methods utilizing standard nite differences pose
strict conditions on discretization gran-ularity in order to
preserve sufficient accuracy. The nal choice of the nodal approach
overthat based on nite elements was driven by the ease of
implementation. In a nodal method,the multigroup diffusion
equations are solved on a coarse grid of nodes (with each
nodecorresponding to a single assembly), using the nite-volume
method . To solve the equationsarising from such discretization,
quantities dened for nodal surfaces must be related tothose dened
inside. A set of local two-node coupling problems in one dimension,
obtainedby the transverse integration method, is solved for this
purpose since it allows a higherorder representation of the surface
quantities than the traditional nite-volume technique.To achieve
reasonable accuracy and efficiency alike, the non-linear iterative
scheme ties thetransverse integration procedure with the whole-core
nite-volume method ([SA96]).
1.4 Organization of the thesis
The following chapter serves as an overview of the most
important concepts of reactorphysics. Quantities dened in this
chapter are then used in chapter 3 to derive the math-ematical
model based on transport theory. That chapter further outlines
transition tomultigroup diffusion equations. In chapter 4, a
nite-volume method is described andprovides a basis for development
of a nodal method. Transverse integration procedure is
needed for this second step and is described next, together with
an effective method forsolving the associated equations.
Implementation of this method in MATLAB is brieydiscussed in
chapter 5 and compared with veried test results. The nal chapter
sum-marizes the whole work and concludes with possible future
improvements and researchdirections.
-
8/13/2019 Numerical Modeling of Neutron Flux
28/121
4 1 Introduction
-
8/13/2019 Numerical Modeling of Neutron Flux
29/121
5
Chapter 2
Physical background
2.1 Notation
I begin the exposition by introducing some nomenclature used
throughout this chapter.Atomic nuclei consist of nucleons the
protons and the neutrons. Their total numberis called atomic mass
and is denoted by A, the number of protons only is called atomic
number and is denoted by Z (thus the number of neutrons can be
obtained as the differenceA Z ). When I want to write about a
particular nucleus with specic number of protonsand neutrons, I
will call that nucleus a nuclide . Nuclides will be denoted by
symbol AZX (andneutrons by 10n). Nuclides of the same element,
differing only in the number of neutrons (i.e.with same Z but
different A), are called isotopes . Usually, I will write already
mentionednuclides and their isotopes using only their atomic mass
and omitting their atomic number,for instance U-235 and U-238,
respectively, will refer to 23592U and 23892U, respectively.
2.2 Basic concepts
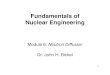
Nucleus structure. Within a stable nucleus, nucleons are kept
together by attractivestrong nuclear forces they exert on each
other. They reside in a well of negative potentialenergy, as
schematically depicted in gure 2.2. Further away from the center of
the nu-cleus, neutrons are not held by any force and thus their
potential energy approaches zero
(assuming that they are not moving). Protons receding from the
nucleus rst obtain somepositive kinetic energy due to repulsive
electrostatic forces which take over the short-rangestrong nuclear
force. They repell the protons from the nucleus, but innitely far
away fromits center, even these electrostatic forces vanish.
Binding energy of a nucleon to a nucleus is dened as a
difference between the energyof the nucleon innitely far away from
the nucleus and its energy inside the nucleus. It isreleased when
the nucleon joins other nucleons in the event of nucleus creation,
i.e. whenit descends into the potential well. Equivalently, the
same amount of energy must besupplied in order to free it from the
nucleus. Nucleons always ll the lowest unoccupied
-
8/13/2019 Numerical Modeling of Neutron Flux
30/121
6 2 Physical background
0 r
U
proton
(a) Proton potential
0 r
U
neutron
(b) Neutron potential
Figure 2.1: Nucleons inside a stable nucleus and their potential
energy U with increasingdistance r from the centre of the nucleus
at r = 0
energy levels the lower they can descend when creating the
nucleus, the higher is theirbinding energy.
The average quantity used when describing actual nuclides from
energetic point of view isthe binding energy of nucleus per nucleon
which is dened as the sum of binding energies of all the nucleons
comprising the nuclide divided by their number (that is, by atomic
mass).It is the binding energy of an average nucleon to the
nucleus.
Energy release from nuclear reactions. As discussed above, in
order to gain energywe need to convert nuclides with lower binding
energy per nucleon (imagine a shallowerpotential well for nucleons
to fall into) to those with higher (deeper potential well).
Lookingat gure 2.2, one easily spots that most tightly bound are
the nuclides with atomic massaround 60. Both lighter and heavier
nuclides have lower binding energies per nucleon.Therefore a
nucleus heavier than
A 60 will release energy when it splits apart (in a
reaction called ssion ), while two nuclei lighter than A 60 will
release energy when theyfuse together ( fusion ). Actual energy
yield from either ssion or fusion corresponds to thedifference of
binding energies per nucleon of the original nucleus and the
reaction productsmultiplied by their respective atomic masses.
By comparing the steepness of the fusion part of the graph in
gure 2.2 with that of thession part, one can deduce that much more
energy is released by fusion however, theactual construction of a
commercially suitable fusion device is accompanied by lots of
tech-nical difficulties and to this day only ssion-employing power
generators are economicallyeffective.
-
8/13/2019 Numerical Modeling of Neutron Flux
31/121
2.3 Neutron-nuclei interactions 7
Figure 2.2: Binding energy per nucleon (adapted from
http://en.wikipedia.org/wiki/Image:Binding_energy_curve_-_common_isotopes.svg
, courtesy of WikimediaCommons)
2.3 Neutron-nuclei interactions
2.3.1 Neutron properties
Neutron is a subatomic particle which does not carry any
electric charge and has a slightlyhigher mass than proton.
Therefore when free, neutrons are unstable and decay into
proton, electron and antineutrino with mean lifetime about 15
minutes ([Y+
06]). Thistime is much longer than the mean lifetime of neutrons
freed during reactions in a reactorand therefore the neutron decay
does not inuence these reactions.
Concerning energy, neutrons may be divided roughly into three
classes:
fast, with energies E > 1MeV,
intermediate, with energies in the range 1 keV < E <
1MeV,
slow, with energies under 1 keV.
-
8/13/2019 Numerical Modeling of Neutron Flux
32/121
8 2 Physical background
Neutrons moving with a slowest possible speed in a given
environment are put into aspecial category and are called thermal
neutrons . They are in a thermal equilibrium with
surrounding atoms and have energies of the order of 10 1
eV. Energy of the interactingneutron strongly inuences behaviour
of the interaction, as described in next section.
2.3.2 Quantifying interactions
Microscopic cross section. Probability of a specic nuclear
reaction is commonly quan-tied by cross sections. Microscopic cross
section, , is the probability that a neutroncoming perpendicularly
to a unit area interacts with a nucleus on that area. The units of
cross section are areal, most often of the order of 1 barn : 10 24
cm2. This is the reasonwhy we usually percieve cross section as the
area presented to an incoming neutron by
the nucleus, for a particular reaction process. It deserevs
mentioning, however, that thereaction probability generally does
not have any relation to the geometry of the nuclei.
Macroscopic cross section. If microscopic cross section is
imagined as the area for aspecic interaction presented by one
nucleus, the macroscopic cross section would be theinteraction area
made up by all the nuclei in a unit volume of material. More
precisely, it isthe probability that a specic interaction occurs
when the neutron travels a unit distancethrough a homogeneous 1
sample of material. Using the microscopic cross section of eachof
the nuclei in the sample, it can be expressed as
= N , (2.1)
where N is the number of nuclei per cm3 of the sample (atomic
density ). Its units arecm 1.
Properties of cross sections. Besides their dependence on
nucleus structure, crosssections also exhibit a very complex
dependence on energy of the reacting neutron. Fur-thermore, they
are related to a particular reaction. The reaction will be specied
in asubscript, e.g. f (resp. f ) denotes the cross section for
ssion.
It is also worth noting that the probability of neutron-neutron
interactions is negligiblecomparing to probabilities of their
interaction with atomic nuclei, since the density of neutrons per
unit volume is negligible when compared to the atomic density. This
has animportant implication on linearity of the governing equation,
as will be shown in chapter 3.
Although the microscopic cross section is the basic material
property actually measuredby experiments, only the macroscopic
cross sections will be important for constructing theequations. Eq.
(2.1) explains how they can be obtained from microscopic cross
sectionsfor a given material.
1 if several types of nuclides are present in the sample, the
macroscopic cross section would be the sumof N ( i ) ( i ) over all
the different nuclides
-
8/13/2019 Numerical Modeling of Neutron Flux
33/121
2.3 Neutron-nuclei interactions 9
Reaction rate. Lets consider a beam of neutrons with density n
neutrons per cm 3 allmoving at speed v through a unit volume 2. The
number of interactions per unit time they
will have with nuclei in that volume can be expressed asr =
nv
and represents the reaction rate . The asterisks in the equation
replace any specic kindof reaction. Furthermore, it is expedient
for the purposes of derivation of the transportequation in chapter
3 to dene the neutron ux as
= nv (2.2)
and reaction rate as
r = . (2.3)Note that in such a denition, the ux is a scalar
quantity, since it is the product of thescalar neutron density and
the scalar magnitude of their velocity vectors. The term
uxoriginates again from the units (cm 2s 1) which correspond to
units of (vector) uxes inmany other disciplines (e.g. heat transfer
or electromagnetic theory).
2.3.3 Types of reactions
There are two classes of possible interactions between neutron
and nucleus: scattering andabsorption .
Scattering. When the neutron is subject to a scattering
collision, the direction of itsmovement is changed and its energy
(or, equivalently, speed) lowered. Scattering reactionscome in two
fashions elastic and inelastic . The former can be imagined as a
classic colli-sion of two perfectly elastic balls3. The energy of
the neutron-nucleus system is conserved,all the energy that the
neutron loses in the moment of collision is transferred to the
targetnucleus. The latter does not conserve the energy of the
system some of the transferredenergy escapes in the form of gamma
photons. It happens only when the neutron has en-ergy in the MeV
range and thus affects only neutrons during the rst few moments of
theirlife in the reactor. Therefore mainly elastic scattering is
interesting for reactor modellingpurposes. Scattering probability
is measured by the scattering cross section, s (resp. s ).
Absorption. In an absorption event, a freely ying neutron hits a
nucleus and is cap-tured. Such a neutron is lost for further
interactions but (via ssion, a special case of absorption) can
liberate new neutrons. When the neutron is absorbed, the nucleus
(A,Z) turns into an unstable compound nucleus (A + 1, Z). The
compound nucleus obtains
2 if each neutron had different speed (a typical case in real
situations), the following equations had tobe integrated over v
3however, the exact course of that reaction is determined by
quantum mechanical laws
-
8/13/2019 Numerical Modeling of Neutron Flux
34/121
10 2 Physical background
the kinetic and the binding energy of the neutron and this
additional energy allow nu-cleons to get to higher energy levels
the nucleus is said to attain an excited state. In
order to get back to its stable ground state (with nucleons in
positions of lowest energy),it has to deexcite . Deexcitation has
the form of particle emission where the actual par-ticle emitted is
determined by the type of the absorption reaction. The two
absorptionreactions that mostly affect neutron distribution in a
reactor ssion (cross section f and radiative capture (cross section
) are described in the next two sections in moredetail. However,
there are more types of absorption events happening when a
neutronstrikes the nucleus (interested reader is referred to
publications devoted to nuclear physics,such as [Sta01]). The total
probability that a neutron will be captured by any of them
isexpressed by the absorption cross section, a (thus a = f + + . .
. where the ellipsisrepresents any unmentioned capture events).
Macroscopic absorption cross section a isdened accordingly.
2.3.4 Fission
Fission is the reaction that makes power production in nuclear
energy stations possible.For ssion to start, the neutron and proton
potential barriers must be surpassed in order toseparate the
nucleons from each other and let them reorganize into different
nuclides withhigher binding energies per nucleon (recall paragraph
about nucleus structure on page 5).There are several possibilities
how to overcome the barrier, though only two are viable ina nuclear
reactor 4
1. quantum tunneling allows penetration of the barrier without
much effort, but happensextremely rarely. Its probability becomes
measurable only at high atomic masses.Nevertheless, certain of
those heavy nuclides like 25298Cf exhibit this so called
sponta-neous ssion quite often and are even used as additional
neutron sources in nuclearreactors.
2. neutron induced ssion , on the other hand, is common in a
nuclear reactor and is theprincipal source of neutrons in the
reactor.
Neutron induced ssion. As noted in section 2.3.1, neutron is
uncharged which meansthat it is not repelled by protons inside the
nucleus. As a consequence it can easily comeclose enough to other
nucleons inside the nucleus to be bound by strong nuclear
forces.The compound nucleus in an excited state is formed in the
process. If there is sufficientexcitation (above a threshold called
activation energy of the nucleus ), ssioning may start.
There are nuclides, called ssile , whose activation energy is
not much higher than thebinding energy of an additional neutron to
that nuclide. The neutron doesnt need to havemuch kinetic energy in
order to initiate ssion of these nuclides. They are represented
e.g.by 23592U or 23994Pu generally heavy nuclides with odd atomic
mass number ([Sta01, p. 6]).
4 the others include e.g. bombarding the nucleus by
highly-energetic protons, which requires a particleaccelerator.
-
8/13/2019 Numerical Modeling of Neutron Flux
35/121
2.3 Neutron-nuclei interactions 11
Fission of ssile nuclides is utilized in thermal reactors , so
called because ssion-inducingneutrons can be slow, even thermal
(section 2.4 explains why having thermal neutrons
initiate ssion is so effective).The other kind of nuclides must
also utilize high kinetic energies of impacting neutronsin order to
split apart. These are said to be ssionable (e.g. 23892U or
24094Pu, heavy nuclideswith even masses) 5. Fast reactors utilizing
fast moving neutrons ( E k 1 MeV) to ssionssionable material will
not be considered since the PWR reactors studied in this work
fallinto the former category.
Scheme of the reaction. A ssion of 23592U (U-235) has the
following general form (theasterisk denotes the excited state of
the nuclide):
235
92U + 1
0n
(236
92U)
2 ssion fragments + recoil energy 2 ssion products + 10n + ( + )
+ E .
(2.4)
The heavy uranium nucleus splits into two medium sized nuclei
called ssion fragments .When split, the nucleons of the fragments
are in a range of dominating electrostatic re-pulsion and thus the
fragments recoil at very high speed. However, due to their
limitedmovement possibility in solid fuel (only a few centimeters),
all their kinetic energy (about170 MeV) gets quickly converted to
heat. This comprises about 85% of the total energyproduction by
ssion, the rest being released during subsequent decays of the
fragments( E ).
Fission fragments are highly unstable and begin stabilizing
almost instantly (10 12 s)by emission of the so called prompt
neutrons and rays of prompt gamma photons. Thisprocess is governed
by statistical rules, usually two or three prompt neutrons are
freedper ssion. The result of this initial decay is a conversion of
ssion fragments into morestable ssion products . Again, the precise
pair of ssion products cannot be determined,but usually nuclides
with atomic mass around 95, respectively 139, come out of a
U-235ssion event (e.g. Ba+Kr or Xe+Sr, see e.g. [Her81, p.
23]).
Delayed neutrons. Although more stable than ssion fragments, the
initial ssion prod-ucts are typically still radioactive and undergo
a series of electron emissions ( decay)followed by gamma radiation
to nally end up as stable isotopes. Some nuclides in this se-quence
may also decay by emitting neutrons instead of electrons. Such
neutrons are calleddelayed because they may be released as late as
101 s after ssion. Nuclides exposing thisbehaviour are called
delayed neutron precursors and are typically divided into six
groupsaccording to their half-lives.
Emission of a delayed neutron is a rare event only about 1% of
neutrons liberated byssion are delayed and the rest are prompt.
However, even such a small fraction increases
5note that from the point of view of additional neutron energy
needed to trigger the ssion process,every ssile nuclide is also
ssionable
-
8/13/2019 Numerical Modeling of Neutron Flux
36/121
12 2 Physical background
the average neutron lifetime from about 10 4 s (for only prompt
neutrons) to about 10 1 s(taking into account also the delayed
neutrons), depending on the half-life of the precursor.
By increasing the neutron lifetime, delayed neutrons make it
possible to control the rateof power generation by adjusting the
neutron production rate without them, a smallchange in neutron
production rate would result in an unmanageably fast change in
powerproduction rate.
The effect of delayed neutrons becomes important in reactor
dynamics calculations. Asthis thesis deals with a steady state
problem, it is not necessary to be concerned withthem in much
detail. A more thorough treatment of this topic can be found e.g.
in[Sta01, Chap. 5] or [Her81, Chap. 6].
Properties of neutrons released by ssion. I will denote the
average number of prompt and delayed neutrons, respectively, by
p and
d, respectively These counts depend
on the energy of the neutron responsible for the reaction and on
the nucleus being ssioned.The average number of both prompt and
delayed neutrons obtained is then denoted by , = p + d. For U-235
ssioned by thermal neutrons, its value is = 2.5 neutrons.
The energy with which are the neutrons emitted is of the order
of 1 MeV for promptneutrons and 0.1 MeV for the delayed ones. The
probability of prompt (respectivelydelayed) neutron being released
with energy E is measured by the ssion spectrum , p(E )and d,i (E
), respectively, where the index i represents the particular
precursor group fromwhich the delayed neutron originated. Empirical
behaviours of these functions of energyare known, gure 2.3 shows an
example of the spectrum of prompt neutrons freed by U-235ssion
event. After setting free, neutrons diffuse through the surrounding
environment and
Figure 2.3: Fission spectrum of prompt neutrons for U-235 (from
[Sta01, p. 12])
lose their energy by scattering, until they are captured by some
nucleus, escape the core
-
8/13/2019 Numerical Modeling of Neutron Flux
37/121
2.3 Neutron-nuclei interactions 13
or even up their energy with the nuclei around.
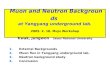
Fission cross section. The probability that a neutron causes
ssion is expressed bythe ssion cross section , f . As pointed out
in section 2.3.2, the cross section is a verycomplicated function
of neutron energy. For instance, microscopic ssion cross sections
of two main isotopes that are contained in natural uranium are
plotted in g. 2.4 against theenergy of the neutron inducing that
reaction. The ssion neutron is born in the rightmostpart of the
graph (MeV energy range) and slows down during its life to the
leftmost part.The difference between ssile U-235 and ssionable
U-238 can be clearly spotted from thegraphs. Apart from resonances
in the intermediate energy range, the probability that U-238 will
be ssioned by a neutron with energy below 1 MeV is negligible. On
the otherhand, note that the less energetic a neutron is, the
greater chance it has to ssion a U-235nucleus.
2.3.5 Radiative capture
The most common type of interaction that can happen when a
neutron hits a nucleus of virtually any element is the radiative
capture. The excited compound nucleus achievesits ground state by
emission of a photon of gamma radiation. This kind of absorption
isparasitic since the absorbed neutron can no longer cause any
other reaction and no newneutron is freed as a compensation. For
some kind of nuclei (called fertile , e.g. U-238), thisform of
decay may result in conversion of the nucleus to a ssile one.
Reactors utilizingthis process to breed new fuel on the course of
their run are called breeder reactors (e.g.[Sta01, chap. 7]).
-
8/13/2019 Numerical Modeling of Neutron Flux
38/121
14 2 Physical background
-910 -810 -710 -610 -510 -410 -310 -210 -110 010 110Energy
(MeV)
10-1
10 0
10 1
10 2
10 3
C r o s s
S e c
t i o n
( b )
(a) Microscopic cross section of U-235 ssion
-810 -710 -610 -510 -410 -310 -210 -110 010Energy (MeV)
10-8
10-7
10-6
10-5
10-4
10-3
10-2
10-1
10 0
10 1
C r o s s
S e c
t i o n
( b )
(b) Microscopic cross section of U-238 ssion
Figure 2.4: Energetic dependence of ssion cross section (from
reference [Kor](http://atom.kaeri.re.kr/cgi-bin/endfplot.pl ))
-
8/13/2019 Numerical Modeling of Neutron Flux
39/121
2.4 Chain Reaction 15
2.4 Chain Reaction
Every ssion reaction consumes one free-moving neutron, but
releases a few more in ex-change. Each of these liberated neutrons
might induce new ssion reactions if they hit afuel element.
However, not all manage to hit that fuel nucleus in a way that
makes it split.To sustain ssion in the reactor, at least one of the
liberated neutrons must, on average,survive to induce new ssion.
This process of sustaining ssion is called chain reaction .
Neutron lifecycle. Chain reaction takes place in the reactor
core, sometimes also calledactive zone . The active zone contains
fuel assemblies, coolant, moderating and absorbingmaterial and some
structural material like cladding and spacers.
The fuel has typically a form of uranium-lled rods plugged in
the assemblies. Natural
uranium, however, contains more than 99% of ssionable isotope
U-238 and only about0.7% of ssile U-2356. Only neutrons with high
energy (on MeV levels) can induce thession of U-238 (see gure
2.4(b)). Such neutrons are present only near the origin of
theirliberation since with increasing time they gradually lose
their energy due to collisions withother nuclei.
Isotope U-235, on the other hand, may be ssioned by neutrons of
any energy but theprobability is much higher for thermal neutrons
(see gure 2.4(a)). In thermal reactors,most ssion events are caused
by thermal neutrons hitting U-235 nuclides. Since thereis so little
of U-235 in natural uranium, the effort is to slow down the
neutrons as muchas possible to facilitate the reaction. This is the
job for the moderator nuclei. However,as neutron energy sinks to
the keV range, the probability of non-productive radiativecapture
(see section 2.3.5) on U-238 becomes quite high. Therefore, a good
moderatorshould slow down the neutrons as quickly as possible in
order to avoid these unwantedcaptures. Naturally, it should also
capture the neutrons by itself as little as possible.Efficient
moderators having both these properties are e.g. heavy water or
graphite; PWRreactors use ordinary water both to cool down the fuel
assemblies and to moderate fastssion neutrons.
Freely moving neutron can also be non-productively absorbed by
other nuclides insidethe active zone, e.g. by coolant, moderator
and structural atoms or even by U-235 (thoughmore often this
capture event ends by productive ssion). Except being absorbed,
theneutron can also leak entirely out of the core through its
boundary 7. This may be remediedby placing a special material
around the active zone that reects a portion of the neutronsback
(hence the commonly used term reector ).
Effective multiplication constant. The conclusion of the
previous paragraph is thatonly a small fraction of neutrons
initially created by ssion events in fuel assemblies will
6PWR designs utilize slightly enriched natural uranium with
concentration of ssile material raised toabout 3% ([ CEZ], [Her81,
p. 210]).
7 this is possible since neutrons do not interact with the
electron clouds of atoms comprising the boundarywalls; only the
minuscule nuclei stand in the way of the escaping neutron.
-
8/13/2019 Numerical Modeling of Neutron Flux
40/121
16 2 Physical background
have the opportunity to induce further ssions of U-235. Such
neutrons give birth to anew generation of neutrons. If their number
is ng 1 and the number of neutrons in this
new generation is denoted by ng then the ratiokeff =
ng 1ng
(2.5)
is called effective multiplication constant . Depending on its
value, the reactor can berunning in three different states:
keff < 1, subcritical state. The population of neutrons in
the active zone decreases;chain reaction is dying out.
keff = 1, critical state. The population of neutrons in the
active zone remains con-stant; chain reaction is
self-sustained.
keff > 1, supercritical state. The population of neutrons
increases; chain reactiongrows.
The critical state describes the steady operation of the reactor
number of neutronswithin the core doesnt change and power
production is constant. The aim is to alwaysbe as close to this
state as possible. The condition for criticality depends on the
sizeand geometry of the reactor (affecting leakage) and on the
material composition (affectingnumber of absorptions and ssions).
Usually, the geometrical properties are given andcant be changed,
so in order to maintain neutron equilibrium, material properties
mustbe adjusted.
During reactor operation, changes in multiplication coefficent
are handled by manipu-lating absorption devices. In PWR reactors,
absorption is controlled by two main mecha-nisms. In the rst,
absorbing rods made of boron steel are moved into the fuel
assemblies tocontrol the momentary uctuations in neutron population
density (usually during startupand shutdown operations). To
compensate for the slow changes in long-term chain reac-tion,
absorbing boric acid is dissolved in the cooling water and its
concentration is variedappropriately.
In the fuel management area, the multiplication coefficient is
interesting as a measureof long-term stability of the chain
reaction for a proposed fuel pattern. The primary ob-
jective of fuel loading optimization is to nd a conguration that
supports a self-sustainedchain reaction of the core and hence the
multiplication coefficient serves as an optimalityindicator. As
various models are obtained by adjusting the parameter of the
governingequations (as mentioned earlier in section 1.2), this
parameter is directly related to themultiplication factor. The
connection will be revealed in more detail in section 3.1.4.
-
8/13/2019 Numerical Modeling of Neutron Flux
41/121
17
Chapter 3
Mathematical model
Neutron distribution inside the reactor core is mathematically
best described by trans-port theory, originally developed by
Boltzmann to explain distribution of particles in gas.However, it
has been observed that the complicated equations constituting the
theory canbe simplied to well-examined diffusion equations which
still retain sufficient amount of accuracy.
3.1 Neutron transport theory
3.1.1 Neutron transport equation
The transport equation governs neutron balance inside the active
zone of a reactor. In orderto formulate it in its full generality,
one must take into account all the dependencies of quantities
mentioned in chapter 2. As an important assumption, this chapter
will study thethree dimensional reactor core on a macroscopic
scale, i.e. as a continuous environment, andalso all involved
time-dependent quantities will be assumed continuous in time.
Moreover,all external forces (like gravity) that may act on the
particles and nuclei will be neglected.
3.1.1.1 Basic quantities
Description of neutrons state. Lets think of a neutron moving
throughout the corein a direction of a unit vector . If v is the
speed of its movement, then its velocity vector,v = v (E ), is
given by
v = v .Denoting m the mass of the neutron, its energy 1 is
E = 12
mv2.
The state of the neutron at any time t is completely described
by its position r (r = ( x,y,z )),energy E , and direction in which
it is moving. These are the fundamental quantities
1 in the form of kinetic energy, since no other force affects
the free neutral particle
-
8/13/2019 Numerical Modeling of Neutron Flux
42/121
18 3 Mathematical model
uniquely characterizing each neutron and all others may be
expressed in their terms 2. Theranges of all the possible values
they can take form the neutron phase space .
Fundamental quantities of reactor modelling. The most important
physical quan-tity used to quantify the processes caused by
neutrons is the angular neutron density ,denoted 3 by N :
N = N (r , E, , t ).
It is dened in a statistical sense, such that N (r , E, , t ) dr
dE d dt expresses the ex-pected number of neutrons located in a
time interval [ t, t + d t ] in a volume element draround r ,
having energy in an interval [ E, E + dE ] and moving within a cone
formed bya solid angle d around a unit direction vector ([Wil71, p.
12]). The velocity vectorwithin solid angle d of one of the
neutrons from an element dr is depicted in gure 3.1.
x
y
z
v x
v y
v z
r
d r
v
d
Figure 3.1: Position and movement direction of neutrons (adapted
from [Wil71])
To describe the reactions occuring within the reactor, their
cross sections need to bedetermined. Because of the macroscopic
nature of the model, only macroscopic crosssections have to be
considered. Writing explicitly their dependence on energy (as
mentionedin section 2.3.2) and time (since cross section is a
material property and material attributes
2note that this choice of quantities is not unique, e.g. the set
r , v and could have been used insteadlto describe the
neutrons.
3 the atomic density for which the same letter was used in
chapter 2 will not be needed anymore
-
8/13/2019 Numerical Modeling of Neutron Flux
43/121
3.1 Neutron transport theory 19
change during the run of a reactor):
= (r ,E , t ),
we get the probability of neutron with energy E interacting with
a nucleus at point r .Reactions that may be substituted for the
asterisk were discussed in section 2.3.3.
In the case of scattering, the differential scattering cross
section is usually introduced([Wil71, p. 13], [Sch97, p. 10]) to
emphasize the fact that scattering changes energy anddirection of
the inciding neutron:
s (r , E E, , t ) = s (r , E , t )P (r , E E, ), (3.1)where P (r
, E E, ) dE d has the meaning of probability that a collision at
pointr will change neutrons energy and direction from d E d to dE d
.
The angular neutron ux is dened by using equation (2.2):(r , E,
, t ) = v(E )N (r , E, , t ). (3.2)
As noted in section 2.3.2, the angular neutron ux is a scalar
quantity. Instead of repre-senting a ow of neutrons through some
surface, it rather characterizes the rate at whichthe neutrons are
passing through that surface regardless of its orientation 4.
Neutron ux is the unknown quantity which is actually solved for
in the neutron trans-port equation, since it allows to quantify
reaction rates. Using the denition of angularneutron ux, the
reaction rate density is given as in (2.3) by the product:
r (r , E, , t )dE d = (r , E , t )(r , E, , t )dE d . (3.3)
It represents the expected rate per unit time about t at which
neutrons characterized byenergies and directions within d E d are
interacting with nuclei in a unit volume aroundr .
In deriving the transport equation, a vector quantity
corresponding to neutron ux isneeded to specify the directional ow
of neutrons. Angular neutron current obtained by
j(r , E, , t ) = (r , E, , t ) = v (E )N (r , E, , t ) (3.4)
provides such a tool. Indeed, lets take an arbitrary volume V
enclosed by oriented surfaceS . Let dS be the element of that
surface located at point r with a unit outward normal n
and let dS
= n
dS . Then5
j(r , E, , t )dS dE d = (r , E, , t )( n )dS dE d (3.5)stands
for the expected number of neutrons energetically distributed
within d E around E ,owing per unit time through surface element d
S in a direction within d around andwith orientation given by n :
in the case of n > 0, neutrons leak out of V , in the caseof n
< 0, neutrons ow in.
4perhaps ow rate would be a more appropriate name but ux has
already become well-established inreactor physics eld
5 the dot () between vector quantities signies a dot product
-
8/13/2019 Numerical Modeling of Neutron Flux
44/121
20 3 Mathematical model
3.1.1.2 Neutron balance
Let V
R 3 be an arbitrary balance domain inside the core and [ t1,
t2]
[0, +
) an
arbitrary time interval. According to the general balance
principle the change in neutronpopulation in V between times t1 and
t2 must be equal to the amount of neutrons producedby sources
inside the domain less the amount of them lost due to sinks in the
domain andtheir net outow (leakage) across the domain boundary,
during the time interval [ t1, t2].
In addition to position, energy and movement direction must be
determined in order tofully characterize each neutron at any given
time. To complete the conservation statement,I will treat the
remaining two independent variables locally in the sense that
balance involume V will be affected only by neutrons having energy
within some differential elementdE and moving in a direction of
some vector from a differential solid angle d . Both theseelements
may be chosen arbitrarily and the differential area dened by them
in the neutron
phase space will be denoted as dE d . I will ocassionally refer
to these neutrons as tobalance neutrons , i.e. neutrons with direct
inuence on the balance. Integration over theappropriate energy and
direction ranges would yield balance for a general set of
neutrons.
Changes in neutron population
The expression for the change of the amount of neutrons with
energies and directionsfrom balance range dE d , in volume V and
between times t1 and t2, has the followingform:
V
[N (r , E, , t2) N (r , E, , t1)] dr dE d (3.6)
(the times sign has been included to separate the d r symbol
having the role of anintegration symbol and the d E d symbol
originating from the statistical foundations of the variables and
specifying the energetic and directional range of balance
neutrons).
Sources
The primary sources of new neutrons of given energy and
direction distribution are thession reactions and particular forms
of decay. The secondary means of increasing thepopulation of such
neutrons is scattering of existing neutrons originally having
differentenergies and moving in different directions into the
balance range.
Fission. In a ssion reaction, an average number of p neutrons is
emitted promptlyin the process and d neutrons are, on average,
released during the subsequent decay of ssion products (see section
2.3.4).
Prompt ssion neutrons. Let us consider only the prompt neutrons
for the moment. p is a function of energy of the ssion-initiating
neutron and, to be exact, depends alsoon what nuclide is being
ssioned, i.e. on r . Thus p = p(r , E ).
Consistently with the discussion on neutron properties on p. 12,
the distribution of promptly released neutrons in energy will be
measured by their ssion spectrum p. As
-
8/13/2019 Numerical Modeling of Neutron Flux
45/121
3.1 Neutron transport theory 21
in the case of differential scattering, a rigorous treatment of
ssion requires to considernot only the energy of the outgoing
neutron, but also in which direction it is emitted as
well as the energy and incoming direction of the neutron that
actually caused the reaction.Fission spectrum is usually used in
place of the probability function P that appeared indenition (3.1)
of scattering cross section ([Wil71, p. 16]). So p = p(r , E E, )is
the probability that a prompt neutron is released with energy E and
direction as aresult of ssion caused by a neutron with energy E
coming from .
Number of ssions caused by neutrons of energy E is characterized
by the ssion cross section , f = f (r , E , t ). Note that
differential ssion cross section could be dened as in(3.1), though
it is more common to keep the two terms separated.
In thermal reactors, it is reasonable to expect the same ssile
material distributedthroughout the core (within fuel bundles).
Therefore, the number of neutrons comingfrom a ssion and their
energetic and directional distribution will be the same
(withinstatistical margins) for all ssions regardless of the point
at which they occur. Spatialdependence can thus be omitted from
variables characterizing ssion neutrons.
Applying denition (3.3) to ssion and integrating over all
initial energies and directions 6,the overall expected ssion rate
in a unit volume around point r per unit time at t is givenby
4
0
0 f (r , E , t )(r , E , , t ) dE d .As each ssion triggered by
a neutron with energy E (incoming from ) follows by therelease of
p(E ) p(E
E,
) prompt neutrons with energy E and moving in the
direction of unit vector ,
s f (r , E, , t ) =4
0
0 p(E E, ) p(E ) f (r , E , t )(r , E , , t ) dE d (3.7)species
the total expected yield of prompt ssion neutrons with energy E and
direction in a unit volume around r at t.
Delayed ssion neutrons. The yield of delayed neutrons is
proportional to theconcentration of their precursors. In a general
case, the concentration of the precursornuclei from each of the six
precursor groups would at any point in the core change in timeand
depend on neutron ux. In order to include the effects of delayed
neutrons, the balanceequation must be modied to account for them
and must be solved simultaneously withsix additional partial
differential equations governing the concentration changes.
However,in the case of a two-group model of the reactor and steady
state calculations, the termsconcerning delayed neutrons
essentially disappear from the balance equation and there willbe no
contribution of delayed neutrons to the total ssion neutron
production ([Gar05]).Therefore, for the purposes of derivation of
the nal set of equations (steady state, two-group, diffusion
equations) which will be further discussed in this thesis, taking
delayed
6using the fact that solid angle spans from 0 to 4 and letting
energy span interval [0 , + )
-
8/13/2019 Numerical Modeling of Neutron Flux
46/121
22 3 Mathematical model
neutrons into account is not necessary. Hence I also omit the
redundant indexing, namely p and p .
External sources. There may be other mechanisms of neutron
production besidesssion (for instance, neutrons are spontaneously
released from Cf-252, as described insection 2.3.4), though their
yield is usually negligible comparing to ssion. It is sufficientto
treat all those additional sources by a general term sex (r , E, ,
t ).
So the total source of new neutrons is the sum sf + sex and the
sources density
[s f (r , E, , t ) + sex (r , E, , t )] dE d (3.8)
describes the amount of new balance neutrons introduced per unit
time at t to a unitvolume element around r .
In-scatter. The rate at which collisions between neutrons and
nuclei result in changingthe colliding







![ABSOLUTE NEUTRON FLUX MEASUREMENTS USING AN ...Light [XIOOOO] 6 M asure d an calculate respons e of th thin scintillator at t „ 24 keV ABSOLUTE NEUTRON FLUX MEASUREMENTS carbon recoils](https://img.pdfslide.us/doc/110x75/60cc2bf9d27a211a5241487b/absolute-neutron-flux-measurements-using-an-light-xioooo-6-m-asure-d-an-calculate.jpg)