Embed Size (px)
Citation preview

J. Roychowdhury, University of California at Berkeley Slide 1
Numerical Algorithms for ODEs/DAEs(Transient Analysis)

J. Roychowdhury, University of California at Berkeley Slide 2
Solving Differential Equation Systems
● DAEs: many types of solutions useful DC steady stateDC steady state: no time variations➔ transienttransient: ckt. waveforms changing with time● periodic steady state: changes periodic w time
➔ linear(ized): all sinusoidal waveforms: AC analysisAC analysis➔ nonlinear steady state: shootingshooting, harmonic balanceharmonic balance
● noise analysisnoise analysis: random/stochastic waveforms● sensitivity analysissensitivity analysis: effects of changes in circuit
parameters
d
dt~q (~x(t)) + ~f (~x(t)) +~b(t) = ~0
J. Roychowdhury, University of California at Berkeley Slide 3
Transient Analysisd
dt~q (~x(t)) + ~f (~x(t)) +~b(t) = ~0
● What● inputs b(t) changing with time
➔ find waveforms of x(t) as they change with time● Why
● most general analysis typically needed● sine wave, pulse, etc. inputs typical in many
applications● How
● solve DAE using numerical methods➔ “discretize time”: replace d/dt term➔ convert DAE to nonlinear algebraic equation at each
discrete time point➔ solve this using NR
J. Roychowdhury, University of California at Berkeley Slide 4
Solving DAEs: Preliminaries● Given a DAE: does it have a solution?
● Depends. Various conditions need to hold.● Easier to analyze if DAEs are really ODEs
● Ordinary Differential Equations: i.e.,
● Existence/Uniqueness conditions well known for ODEs➔ f(x) needs to be Lipschitz➔ device models must be smooth / bounded / “physically
reasonable”● watch those if conditions, 1/x, log(x), sqrt(x), etc. terms!
● DAEs? Much more involved● in practice: modifications of ODE methods + heuristics
~q(~x) ´ ~xd
dt~x(t) = ~g (~x; t)
d
dt~x(t) + ~f (~x(t)) +~b(t) = ~0)
J. Roychowdhury, University of California at Berkeley Slide 5
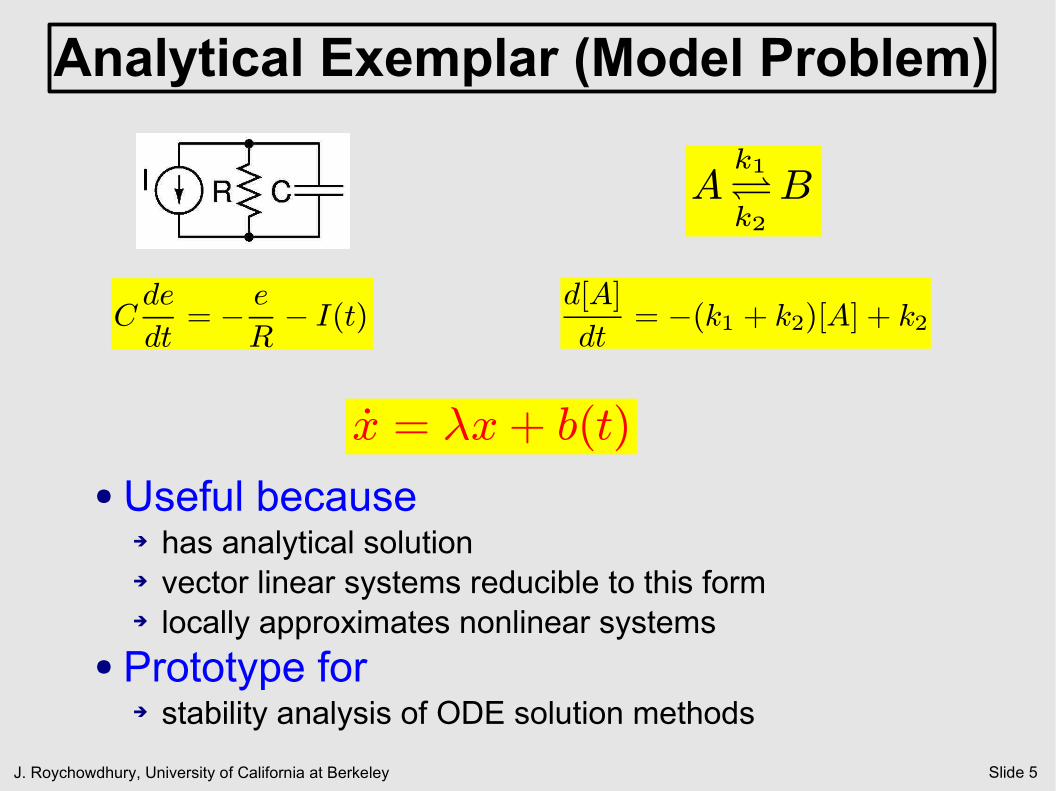
Analytical Exemplar (Model Problem)
● Useful because➔ has analytical solution➔ vector linear systems reducible to this form➔ locally approximates nonlinear systems
● Prototype for➔ stability analysis of ODE solution methods
Ak1k2B
Cde
dt= ¡ e
R¡ I(t) d[A]
dt= ¡(k1 + k2)[A] + k2
_x = ¸x+ b(t)
J. Roychowdhury, University of California at Berkeley Slide 6
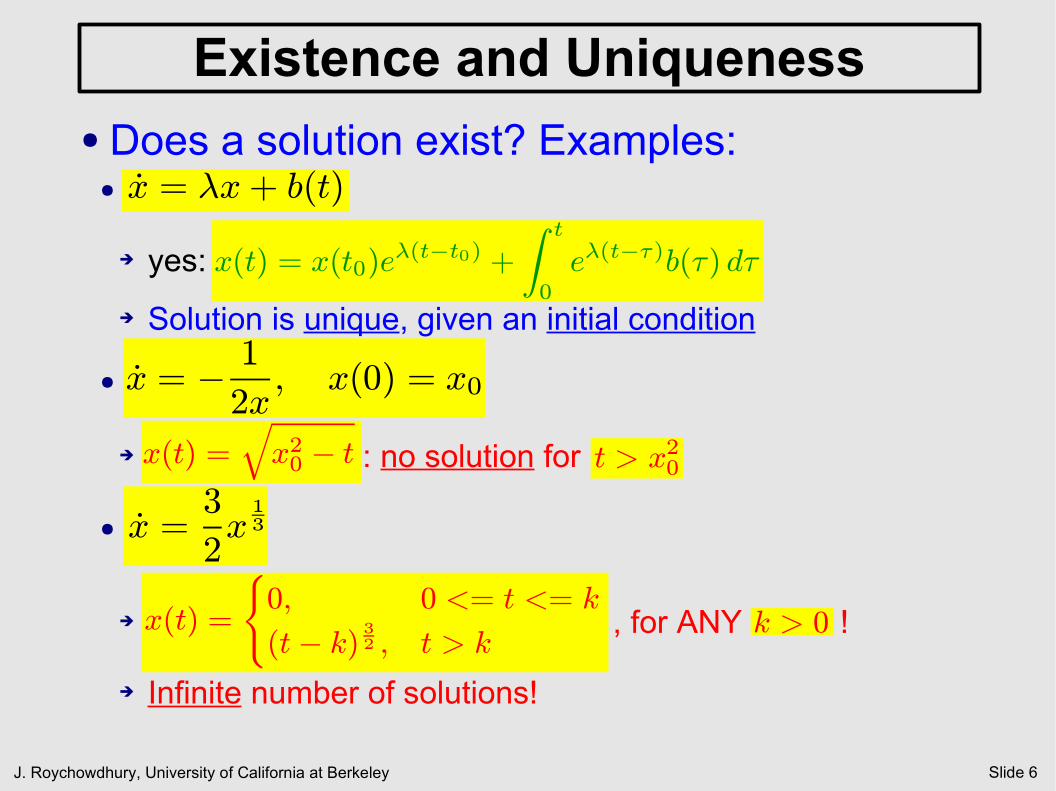
Existence and Uniqueness● Does a solution exist? Examples:
●
➔ yes:
➔ Solution is unique, given an initial condition
●
➔ : no solution for
●
➔ , for ANY !
➔ Infinite number of solutions!
x(t) = x(t0)e¸(t¡t0) +
Z t
0
e¸(t¡¿)b(¿) d¿
_x = ¸x+ b(t)
_x = ¡ 1
2x; x(0) = x0
x(t) =qx20 ¡ t t > x20
_x =3
2x13
k > 0x(t) =
(0; 0 <= t <= k
(t¡ k) 32 ; t > k
J. Roychowdhury, University of California at Berkeley Slide 7
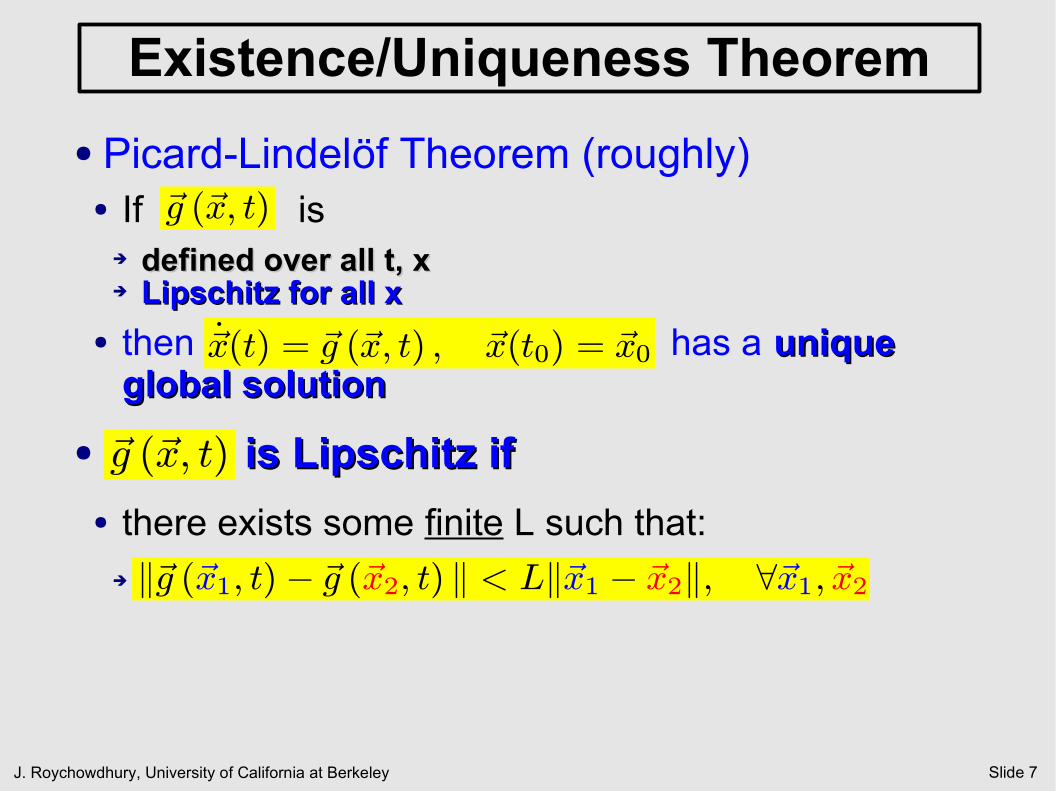
Existence/Uniqueness Theorem
● Picard-Lindelöf Theorem (roughly)● If is
➔ defined over all t, xdefined over all t, x➔ Lipschitz for all xLipschitz for all x
● then has a unique unique global solutionglobal solution
● is Lipschitz ifis Lipschitz if
● there exists some finite L such that:➔
~g (~x; t)
_~x(t) = ~g (~x; t) ; ~x(t0) = ~x0
~g (~x; t)
k~g (~x1; t)¡ ~g (~x2; t) k < Lk~x1 ¡ ~x2k; 8~x1; ~x2
J. Roychowdhury, University of California at Berkeley Slide 8
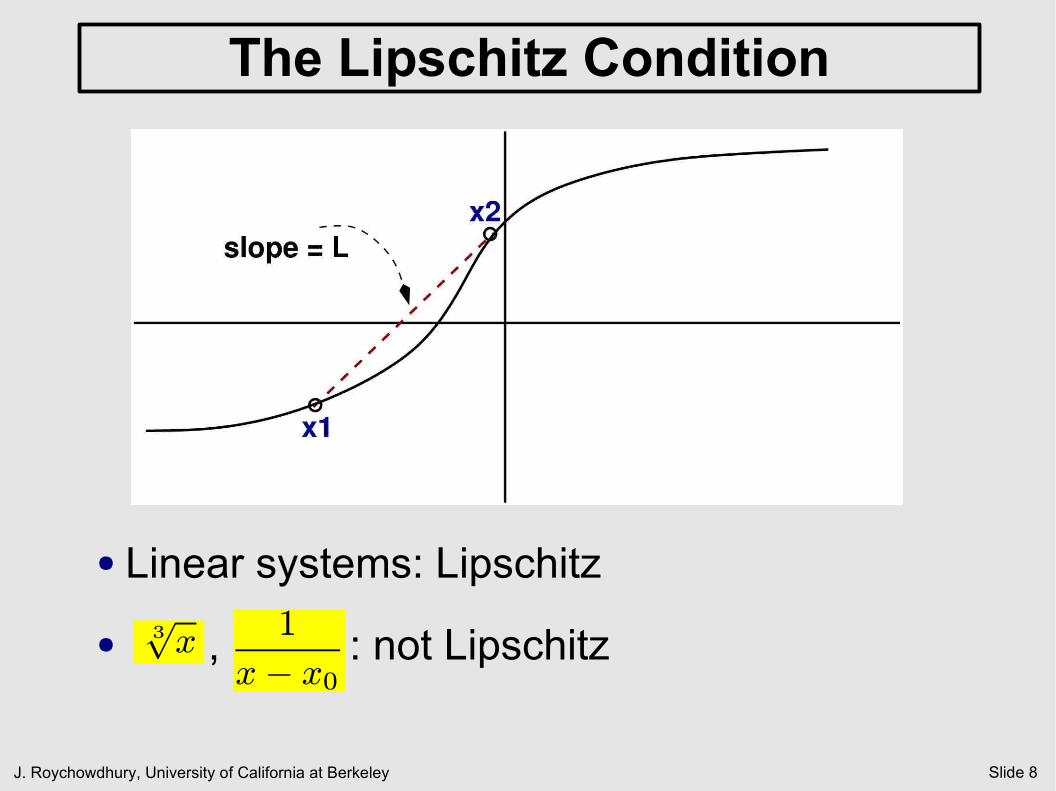
The Lipschitz Condition
● Linear systems: Lipschitz
● , : not Lipschitz3px 1
x¡ x0
J. Roychowdhury, University of California at Berkeley Slide 9
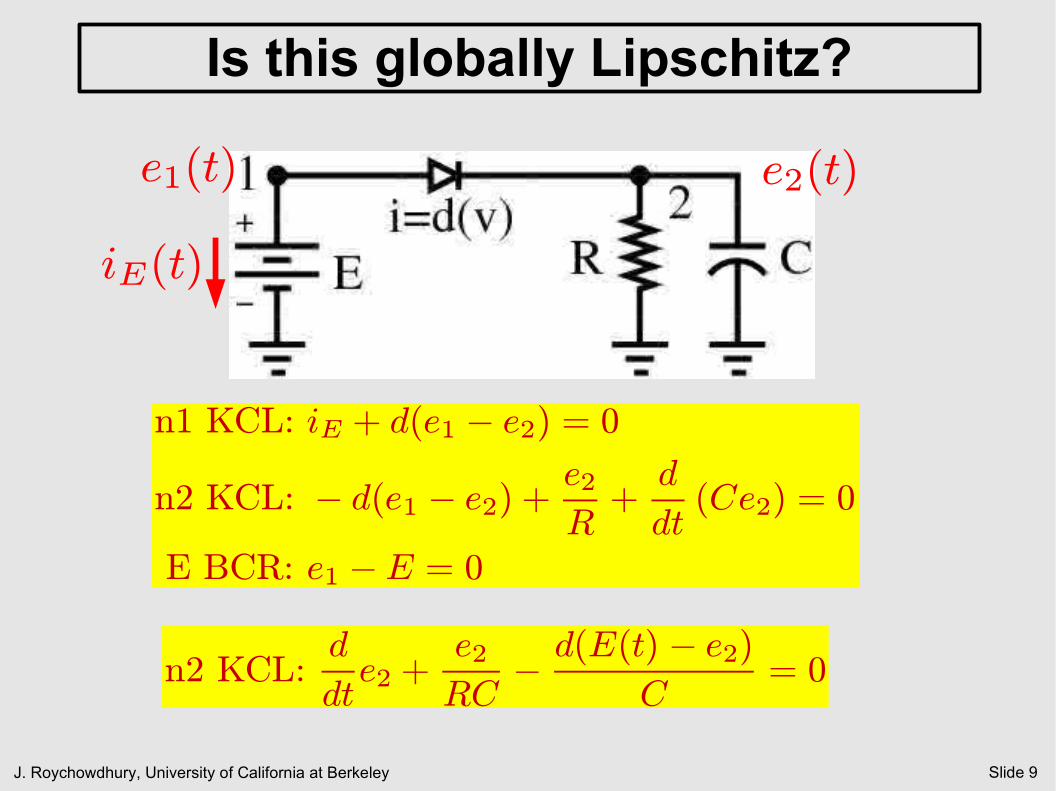
Is this globally Lipschitz?
e1(t) e2(t)
iE(t)
n1 KCL: iE + d(e1 ¡ e2) = 0
n2 KCL: ¡ d(e1 ¡ e2) +e2R+d
dt(Ce2) = 0
E BCR: e1 ¡E = 0
n2 KCL:d
dte2 +
e2RC
¡ d(E(t) ¡ e2)C
= 0
J. Roychowdhury, University of California at Berkeley Slide 10
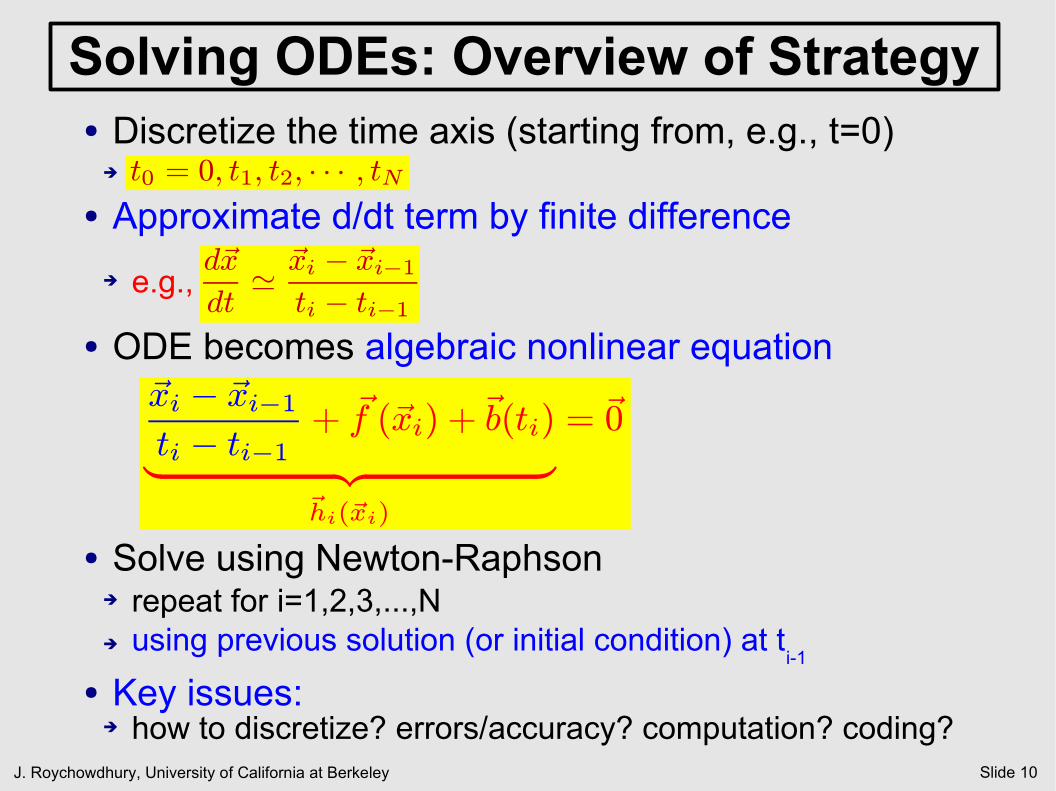
Solving ODEs: Overview of Strategy● Discretize the time axis (starting from, e.g., t=0)
➔
● Approximate d/dt term by finite difference
➔ e.g.,
● ODE becomes algebraic nonlinear equation
● Solve using Newton-Raphson➔ repeat for i=1,2,3,...,N➔ using previous solution (or initial condition) at t
i-1
● Key issues:➔ how to discretize? errors/accuracy? computation? coding?
t0 = 0; t1; t2; ¢ ¢ ¢ ; tN
d~x
dt' ~xi ¡ ~xi¡1ti ¡ ti¡1
~xi ¡ ~xi¡1ti ¡ ti¡1
+ ~f (~xi) +~b(ti)
| {z }~hi(~xi)
= ~0

J. Roychowdhury, University of California at Berkeley Slide 11
Piecewise Polynomial Approximation● Using locally polynomial bases
● assume: ODE solution is locally polynomial● characterize polynomial with a few numbersfew numbers
➔ e.g., samples at different points● find those numbers so that the local polynomial local polynomial
satisfies the ODEsatisfies the ODE
x(t) ' x1 +x2 ¡ x1t2 ¡ t1
(t¡ t1); t 2 [t1; t2]
x(t) ' x1 + c1(t ¡ t1) + c2(t¡ t1)2; t 2 [t1; t2]
J. Roychowdhury, University of California at Berkeley Slide 12
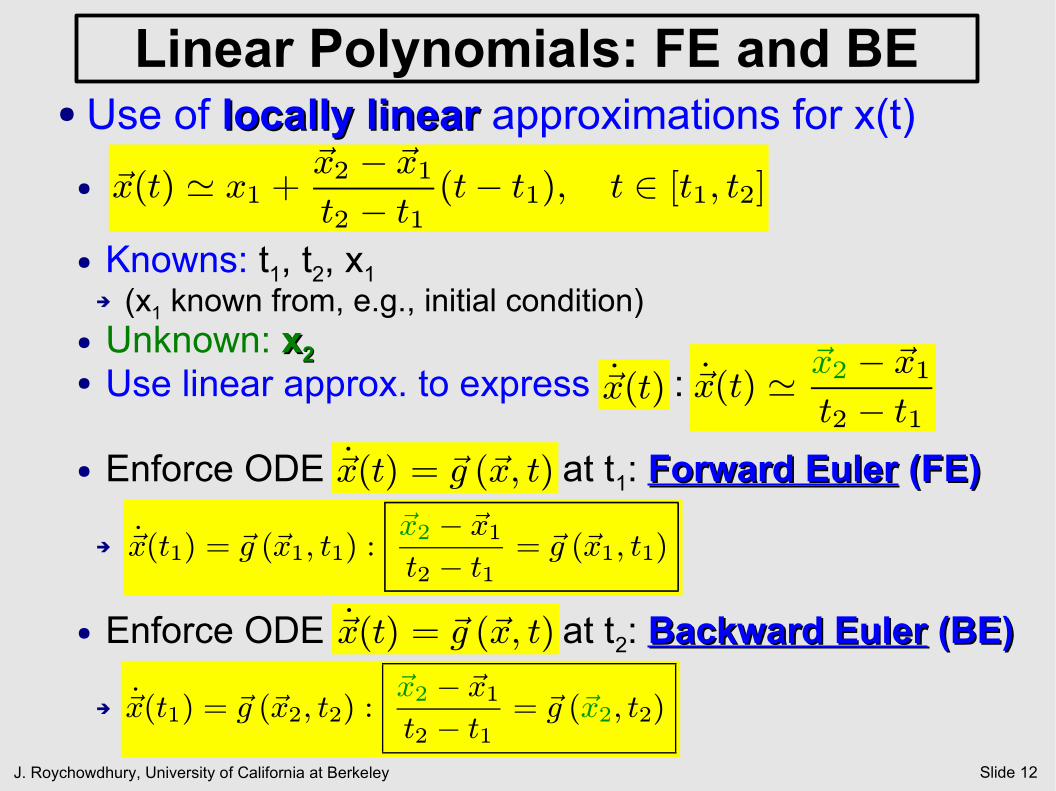
Linear Polynomials: FE and BE● Use of locally linearlocally linear approximations for x(t)
●
● Knowns: t1, t2, x1➔ (x1 known from, e.g., initial condition)
● Unknown: xx22● Use linear approx. to express :
● Enforce ODE at t1: Forward EulerForward Euler (FE) (FE)
➔
● Enforce ODE at t2: Backward EulerBackward Euler (BE) (BE)
➔
~x(t) ' x1 +~x2 ¡ ~x1t2 ¡ t1
(t¡ t1); t 2 [t1; t2]
_~x(t) _~x(t) ' ~x2 ¡ ~x1t2 ¡ t1
_~x(t) = ~g (~x; t)
_~x(t1) = ~g (~x1; t1) :~x2 ¡ ~x1t2 ¡ t1
= ~g (~x1; t1)
_~x(t) = ~g (~x; t)
_~x(t1) = ~g (~x2; t2) :~x2 ¡ ~x1t2 ¡ t1
= ~g (~x2; t2)
J. Roychowdhury, University of California at Berkeley Slide 13
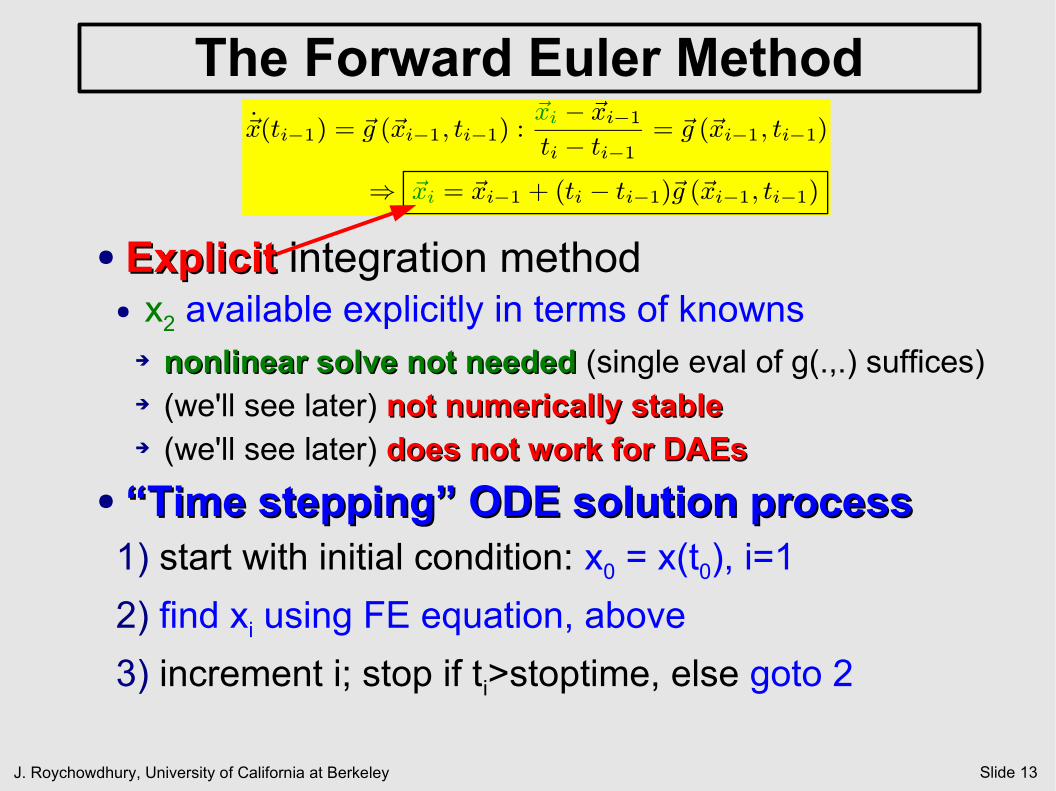
The Forward Euler Method
● ExplicitExplicit integration method● x2 available explicitly in terms of knowns
➔ nonlinear solve not needednonlinear solve not needed (single eval of g(.,.) suffices)➔ (we'll see later) not numerically stablenot numerically stable➔ (we'll see later) does not work for DAEsdoes not work for DAEs
● ““Time stepping” ODE solution processTime stepping” ODE solution process1) start with initial condition: x0 = x(t0), i=1
2) find xi using FE equation, above
3) increment i; stop if ti>stoptime, else goto 2
_~x(ti¡1) = ~g (~xi¡1; ti¡1) :~xi ¡ ~xi¡1ti ¡ ti¡1
= ~g (~xi¡1; ti¡1)
) ~xi = ~xi¡1 + (ti ¡ ti¡1)~g (~xi¡1; ti¡1)
J. Roychowdhury, University of California at Berkeley Slide 14
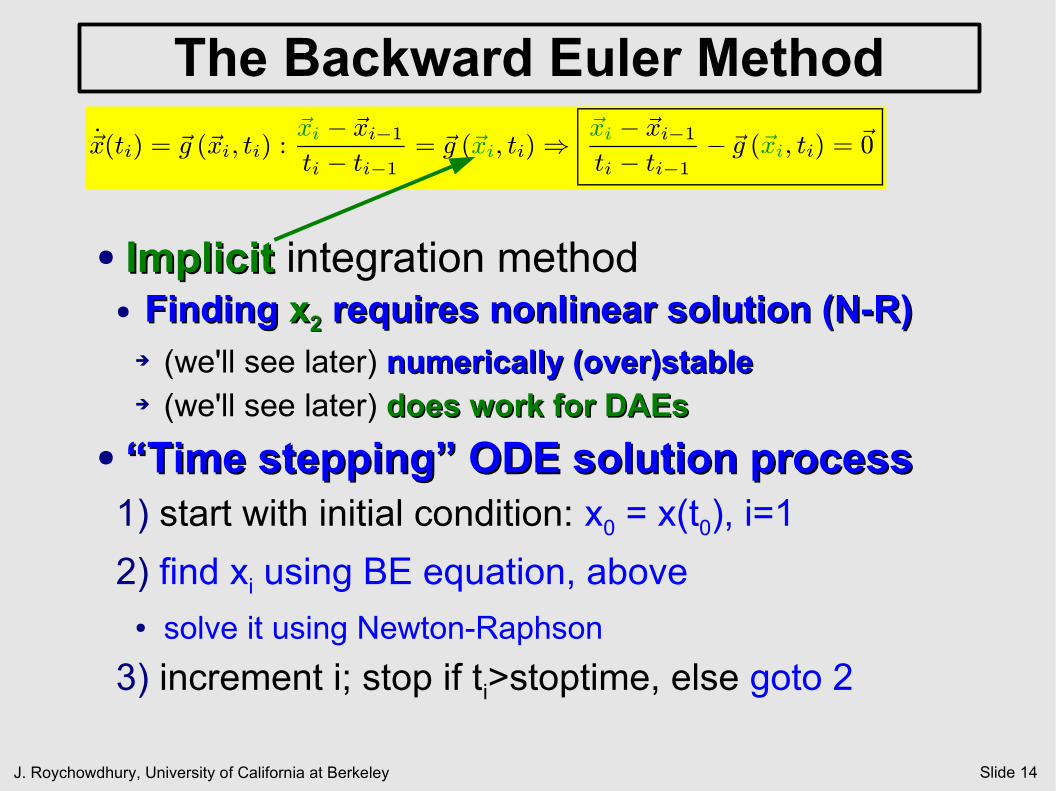
The Backward Euler Method
● ImplicitImplicit integration method● Finding Finding xx22 requires nonlinear solution (N-R)requires nonlinear solution (N-R)
➔ (we'll see later) numerically (over)stablenumerically (over)stable➔ (we'll see later) does work for DAEsdoes work for DAEs
● ““Time stepping” ODE solution processTime stepping” ODE solution process1) start with initial condition: x0 = x(t0), i=1
2) find xi using BE equation, above● solve it using Newton-Raphson
3) increment i; stop if ti>stoptime, else goto 2
_~x(ti) = ~g (~xi; ti) :~xi ¡ ~xi¡1ti ¡ ti¡1
= ~g (~xi; ti))~xi ¡ ~xi¡1ti ¡ ti¡1
¡ ~g (~xi; ti) = ~0
J. Roychowdhury, University of California at Berkeley Slide 15
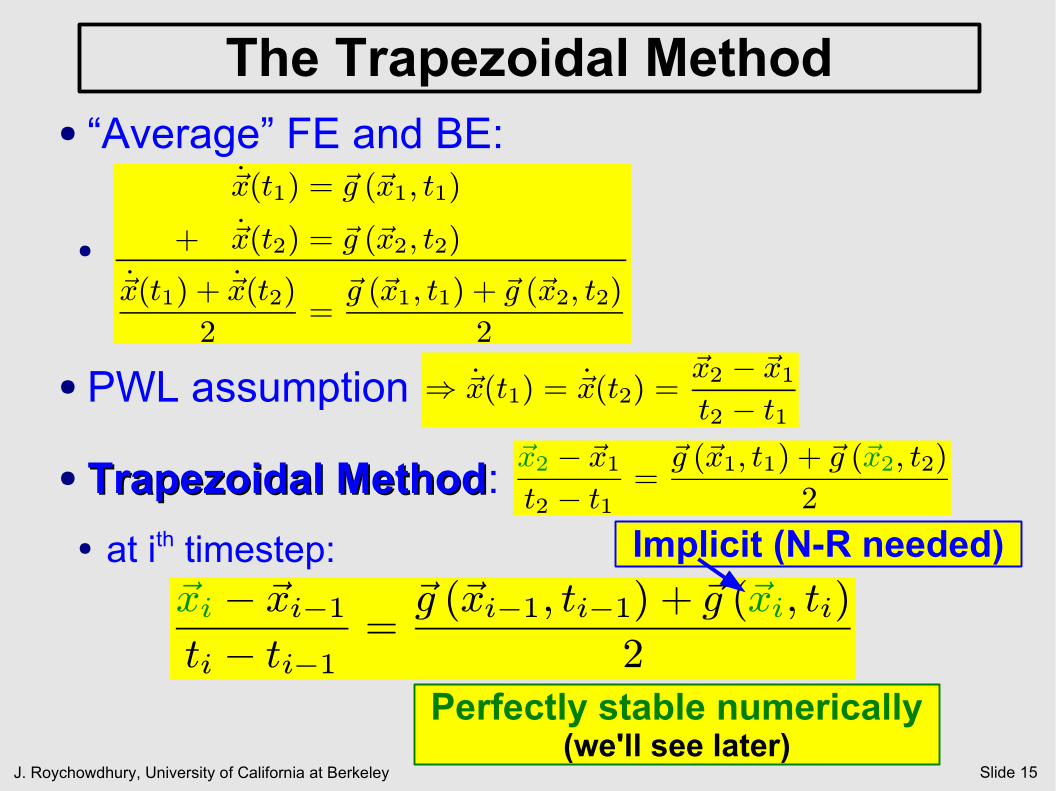
The Trapezoidal Method● “Average” FE and BE:
●
● PWL assumption
● Trapezoidal MethodTrapezoidal Method:
● at ith timestep:
_~x(t1) = ~g (~x1; t1)
+ _~x(t2) = ~g (~x2; t2)
_~x(t1) + _~x(t2)
2=~g (~x1; t1) + ~g (~x2; t2)
2
) _~x(t1) = _~x(t2) =~x2 ¡ ~x1t2 ¡ t1
~x2 ¡ ~x1t2 ¡ t1
=~g (~x1; t1) + ~g (~x2; t2)
2
~xi ¡ ~xi¡1ti ¡ ti¡1
=~g (~xi¡1; ti¡1) + ~g (~xi; ti)
2
Implicit (N-R needed)
Perfectly stable numerically(we'll see later)

J. Roychowdhury, University of California at Berkeley Slide 16
FE, BE, TRAP: Pictorial Summary
● Difference: where/how ODE is “enforced”
J. Roychowdhury, University of California at Berkeley Slide 17
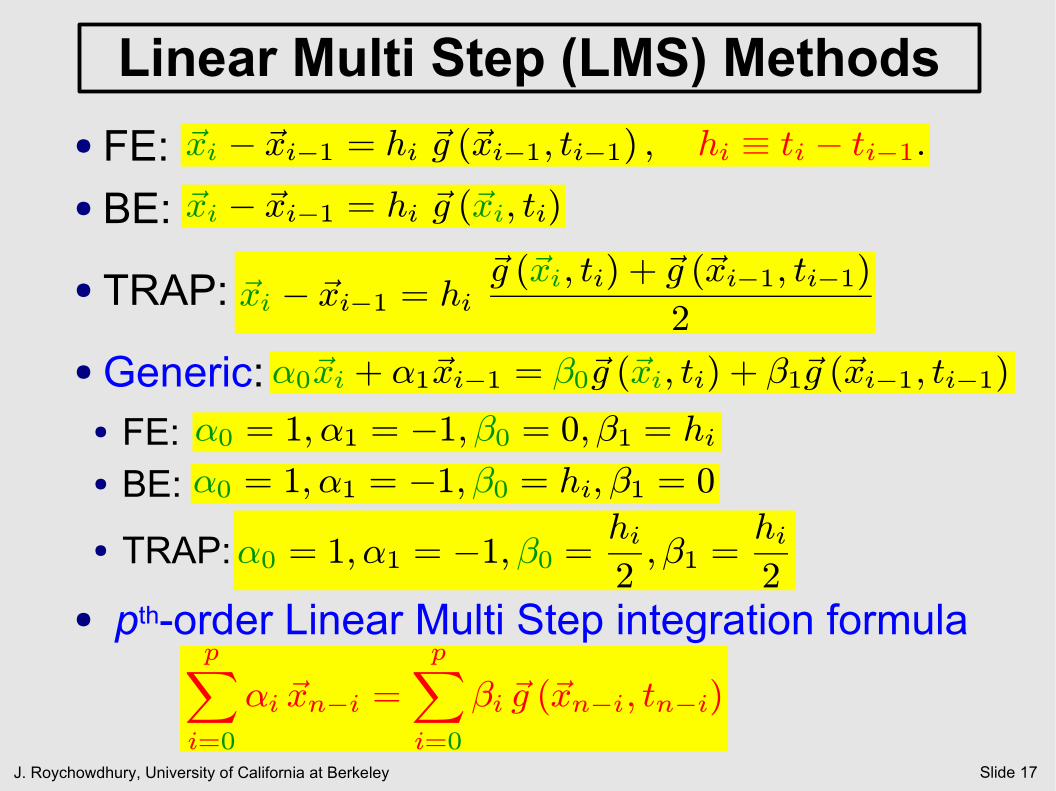
Linear Multi Step (LMS) Methods
● FE: ● BE:
● TRAP:
● Generic:● FE:● BE:
● TRAP:
● pth-order Linear Multi Step integration formula
~xi ¡ ~xi¡1 = hi ~g (~xi¡1; ti¡1) ; hi ´ ti ¡ ti¡1:~xi ¡ ~xi¡1 = hi ~g (~xi; ti)
~xi ¡ ~xi¡1 = hi~g (~xi; ti) + ~g (~xi¡1; ti¡1)
2
®0~xi + ®1~xi¡1 = ¯0~g (~xi; ti) + ¯1~g (~xi¡1; ti¡1)
®0 = 1; ®1 = ¡1; ¯0 = 0; ¯1 = hi®0 = 1; ®1 = ¡1; ¯0 = hi; ¯1 = 0
®0 = 1; ®1 = ¡1; ¯0 =hi2; ¯1 =
hi2
pX
i=0
®i ~xn¡i =pX
i=0
¯i ~g (~xn¡i; tn¡i)
J. Roychowdhury, University of California at Berkeley Slide 18
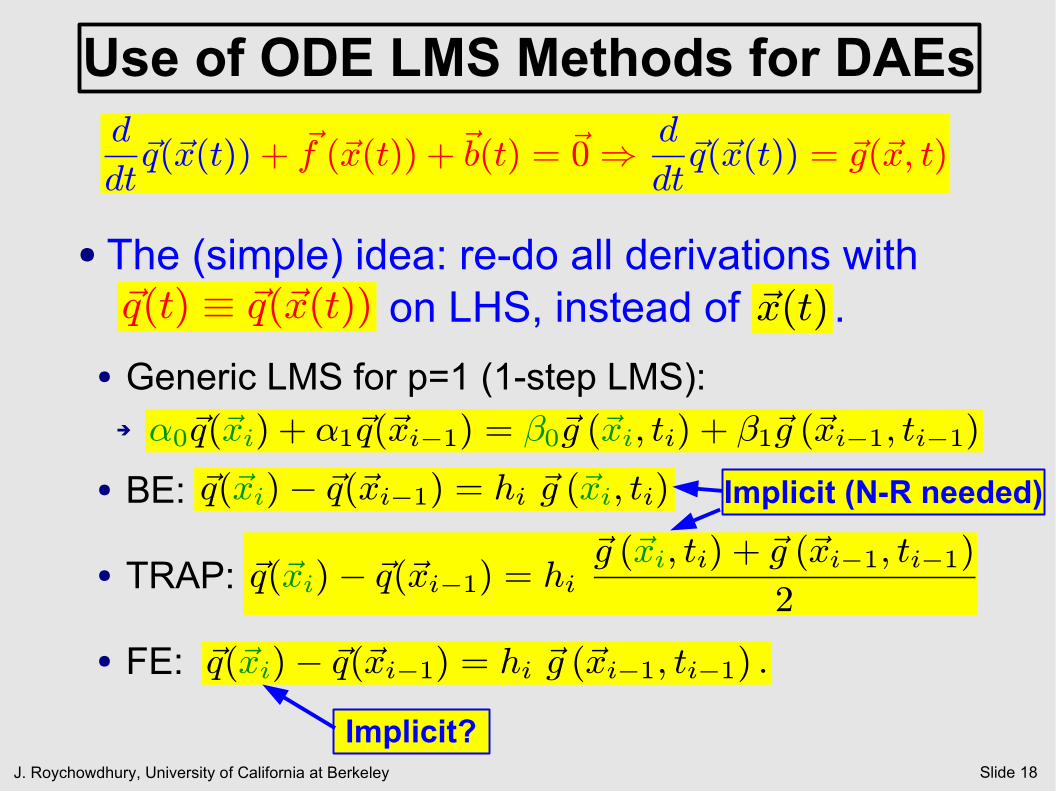
Use of ODE LMS Methods for DAEs
● The (simple) idea: re-do all derivations with on LHS, instead of .
● Generic LMS for p=1 (1-step LMS): ➔
● BE:
● TRAP:
● FE:
d
dt~q(~x(t)) + ~f (~x(t)) +~b(t) = ~0) d
dt~q(~x(t)) = ~g(~x; t)
~q(t) ´ ~q(~x(t)) ~x(t)
®0~q(~xi) + ®1~q(~xi¡1) = ¯0~g (~xi; ti) + ¯1~g (~xi¡1; ti¡1)
~q(~xi)¡ ~q(~xi¡1) = hi ~g (~xi; ti)
~q(~xi)¡ ~q(~xi¡1) = hi~g (~xi; ti) + ~g (~xi¡1; ti¡1)
2
~q(~xi)¡ ~q(~xi¡1) = hi ~g (~xi¡1; ti¡1) :
Implicit (N-R needed)
Implicit?

J. Roychowdhury, University of California at Berkeley Slide 19
Stability of LMS Methods
● Test ODE: ● exact solution:
➔ solution decays if
● What do FE/BE/TRAP produce?
_x(t) = ¸x(t); x(0) = x0:
x(t) = x0et :
¸ < 0:
FE is qualitatitivelywrong
J. Roychowdhury, University of California at Berkeley Slide 20
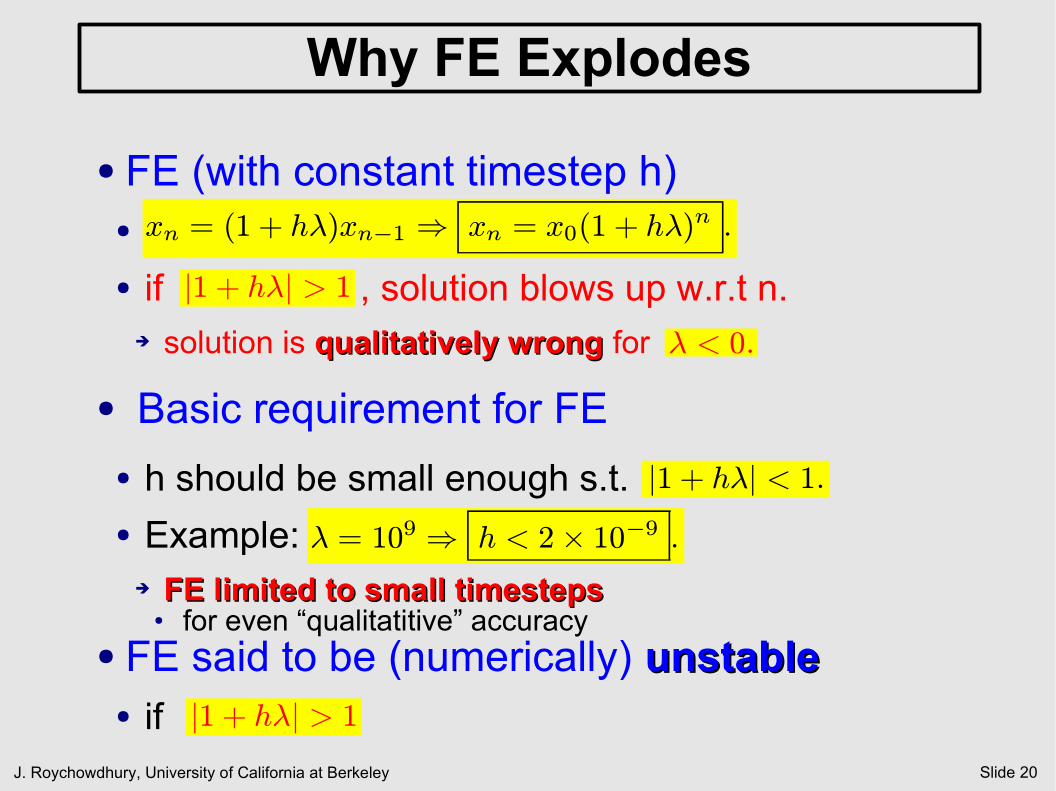
Why FE Explodes
● FE (with constant timestep h)● ● if , solution blows up w.r.t n.
➔ solution is qualitatively wrongqualitatively wrong for
● Basic requirement for FE
● h should be small enough s.t. ● Example:
➔ FE limited to small timestepsFE limited to small timesteps● for even “qualitatitive” accuracy
● FE said to be (numerically) unstableunstable● if
xn = (1 + h¸)xn¡1 ) xn = x0(1 + h¸)n :
j1 + h¸j > 1¸ < 0:
j1 + h¸j < 1:¸ = 109 ) h < 2£ 10¡9 :
j1 + h¸j > 1

J. Roychowdhury, University of California at Berkeley Slide 21
FE: Stability Picture for Complex ● In general: eigenvalues can be complex
● stability condition : circlecircle in h plane j1 + h¸j < 1
Region ofstability

J. Roychowdhury, University of California at Berkeley Slide 22
Stability of BE● BE with constant timestep h
●
● solution will die down if
➔ i.e., all of left half plane.● but also
➔ much of right half plane➔ BE is overstableBE is overstable
● OK only within circleOK only within circle
● ApplicationsApplications● more important more important● much better than FEmuch better than FE
xn(1 ¡ h¸) = xn¡1 ) xn = x01
(1¡ h¸)n :
j1¡ h¸j > 1:
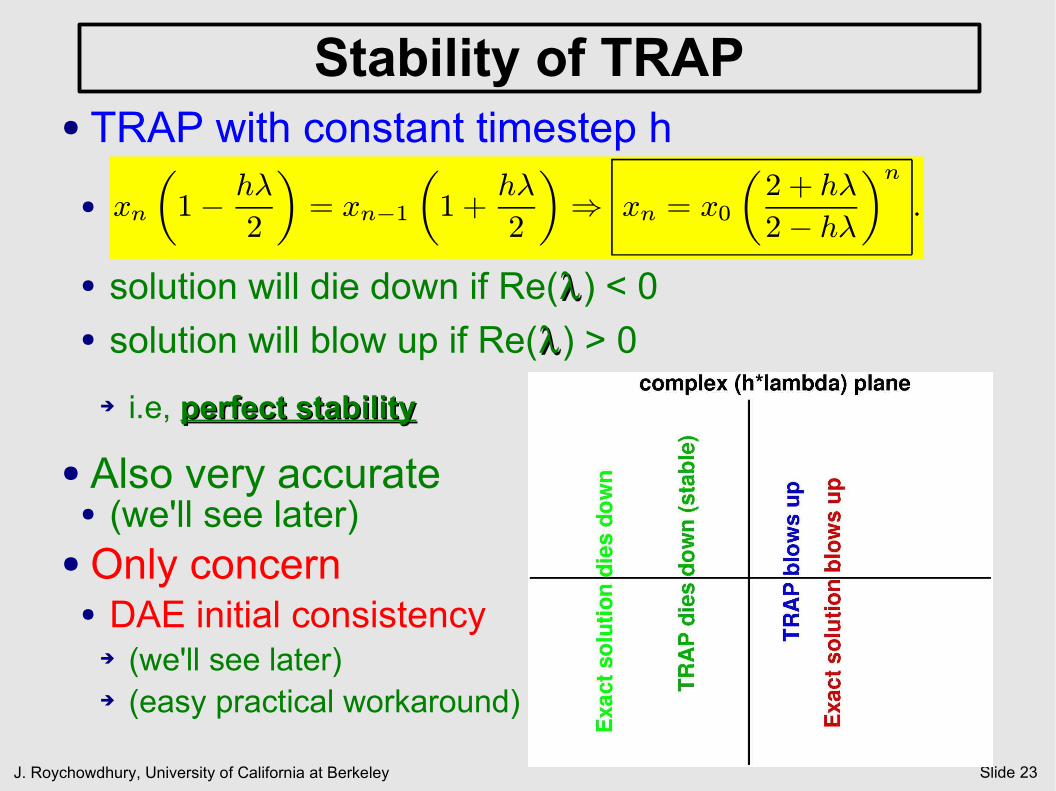
J. Roychowdhury, University of California at Berkeley Slide 23
Stability of TRAP● TRAP with constant timestep h
●
● solution will die down if Re() < 0● solution will blow up if Re() > 0
➔ i.e, perfect stabilityperfect stability
● Also very accurate● (we'll see later)
● Only concern● DAE initial consistency
➔ (we'll see later)➔ (easy practical workaround)
xn
µ1¡ h¸
2
¶= xn¡1
µ1 +
h¸
2
¶) xn = x0
µ2 + h¸
2¡ h¸
¶n:
J. Roychowdhury, University of California at Berkeley Slide 24
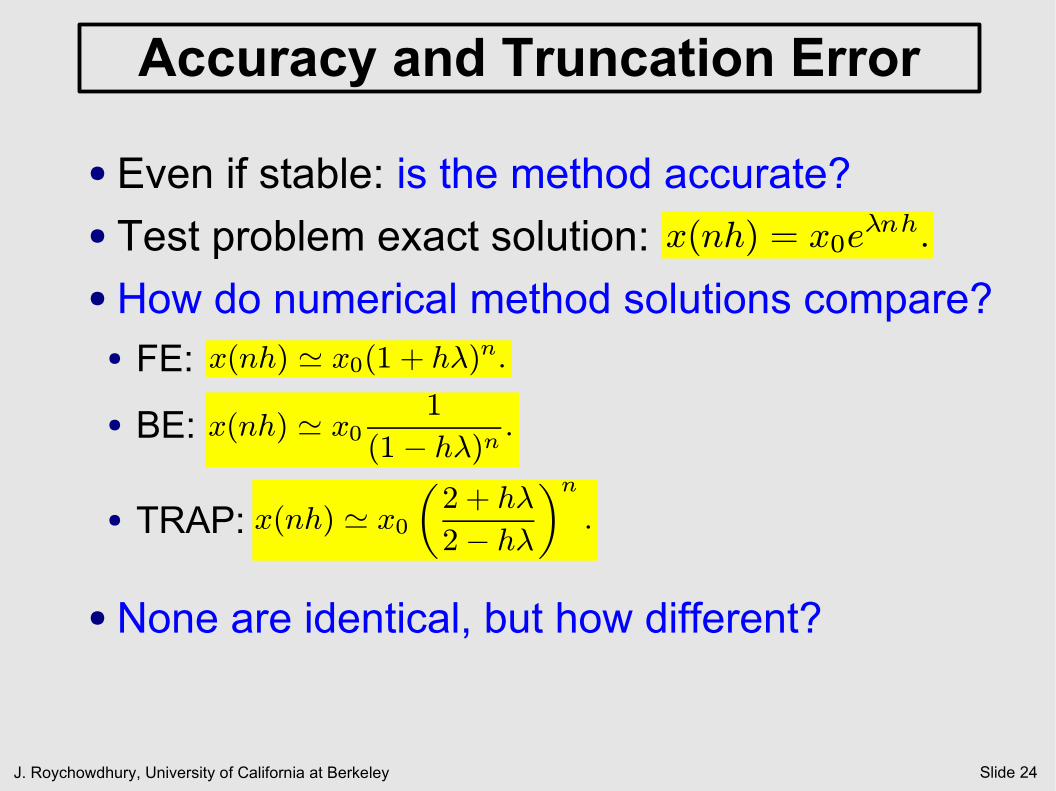
Accuracy and Truncation Error
● Even if stable: is the method accurate?● Test problem exact solution:● How do numerical method solutions compare?
● FE:
● BE:
● TRAP:
● None are identical, but how different?
x(nh) = x0e¸nh:
x(nh) ' x0(1 + h¸)n:
x(nh) ' x01
(1¡ h¸)n :
x(nh) ' x0µ2 + h¸
2¡ h¸
¶n:
J. Roychowdhury, University of California at Berkeley Slide 25
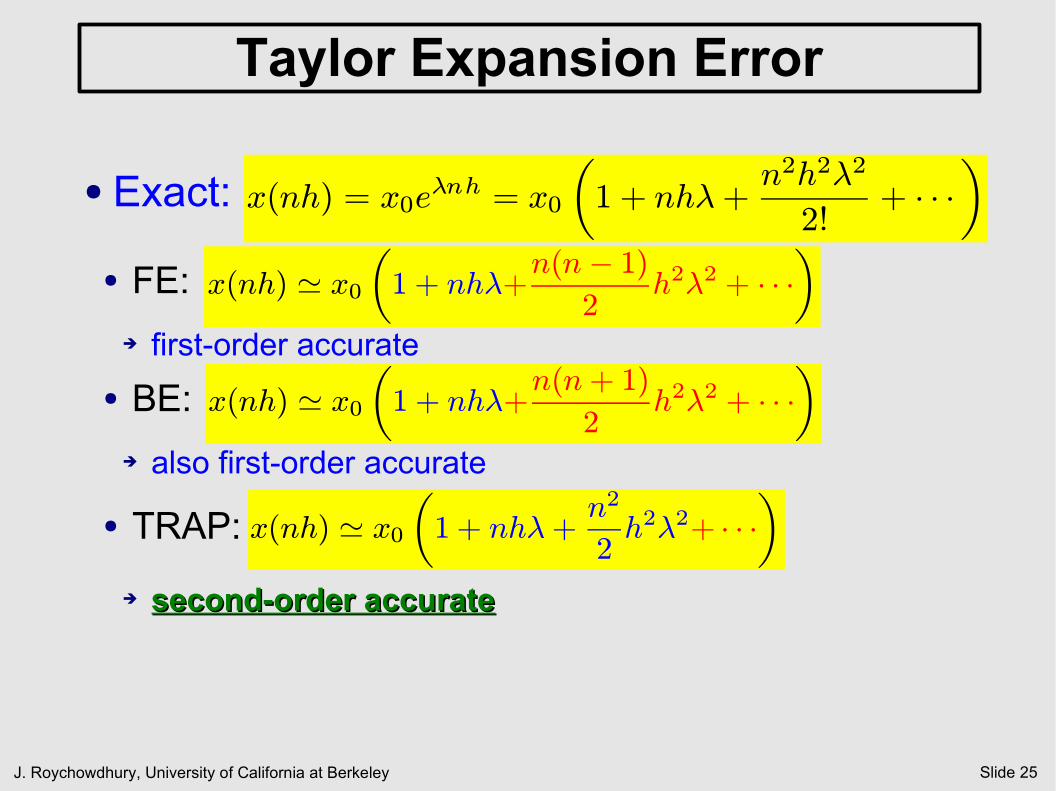
Taylor Expansion Error
● Exact:
● FE:
➔ first-order accurate
● BE:
➔ also first-order accurate
● TRAP:
➔ second-order accuratesecond-order accurate
x(nh) = x0e¸nh = x0
µ1 + nh¸+
n2h2¸2
2!+ ¢ ¢ ¢
¶
x(nh) ' x0µ1 + nh¸+
n(n¡ 1)2
h2¸2 + ¢ ¢ ¢¶
x(nh) ' x0µ1 + nh¸+
n(n+ 1)
2h2¸2 + ¢ ¢ ¢
¶
x(nh) ' x0µ1 + nh¸+
n2
2h2¸2+ ¢ ¢ ¢
¶
J. Roychowdhury, University of California at Berkeley Slide 26
Transient: Timestep Control● Choosing the next timestep dynamically● LTE based control
● apply LTE formulae to estimate error➔ change timestep to meet some specified error
● error specification: like reltol-abstol (reltol=percentage)➔ make sure these are looser than NR tolerances!
● element-by-element vs vector norm based➔ 2-norm vs max norm; DAE issues
● (change integration method based on timestep)● NR convergence based control
● cut timestep if NR does not converge➔ also: increase maxiter
● increase timestep if NR converges “too easily”➔ also: decrease maxiter
J. Roychowdhury, University of California at Berkeley Slide 27
ODE/DAE Packages Out There
● MATLAB has various ODE/DAE integrators● ode23, ode45, ...; ode23t, ode15s, ...
● DASSL/DASPK: general purpose DAE packages
● Linda Petzold, UCSB● Fortran● some tweaking helpful for circuit applications
● Easy (and often worthwhile) to roll your own● tweaking, special heuristics, debugging, ...
J. Roychowdhury, University of California at Berkeley Slide 28
Transient: Other Important Issues● What integration method to use?
● stability?● nonlinear solution required? (implicit vs explicit)● accuracy loss due to discretization?
➔ Local Truncation Error (LTE)➔ higher order methods (more than 1 previous timepoint)
● Vast body of work on ODE integration● linear multi-step methods (LMS), Runge-Kutta,
symmetric, symplectic, “energy-conserving”, etc.● Stiff differential equations
● different variables have very different time constants
➔ stiffly stable methods allow you to take larger time steps● DAE issues
● initial condition consistency; stability; index; …● Dynamic timestep control, NR heuristics, ...
J. Roychowdhury, University of California at Berkeley Slide 29
Solving the Circuit's Equations
● Ckt. DAEs: many types of solutions useful DC steady stateDC steady state: no time variations transienttransient: ckt. waveforms changing with time● periodic steady state: changes periodic w time
➔ linear(ized): all sinusoidal waveforms: AC analysisAC analysis➔ nonlinear steady state: shootingshooting, harmonic balanceharmonic balance
● noise analysisnoise analysis: random/stochastic waveforms● sensitivity analysissensitivity analysis: effects of changes in circuit
parameters
d
dt~q (~x(t)) + ~f (~x(t)) +~b(t) = ~0
J. Roychowdhury, University of California at Berkeley Slide 30
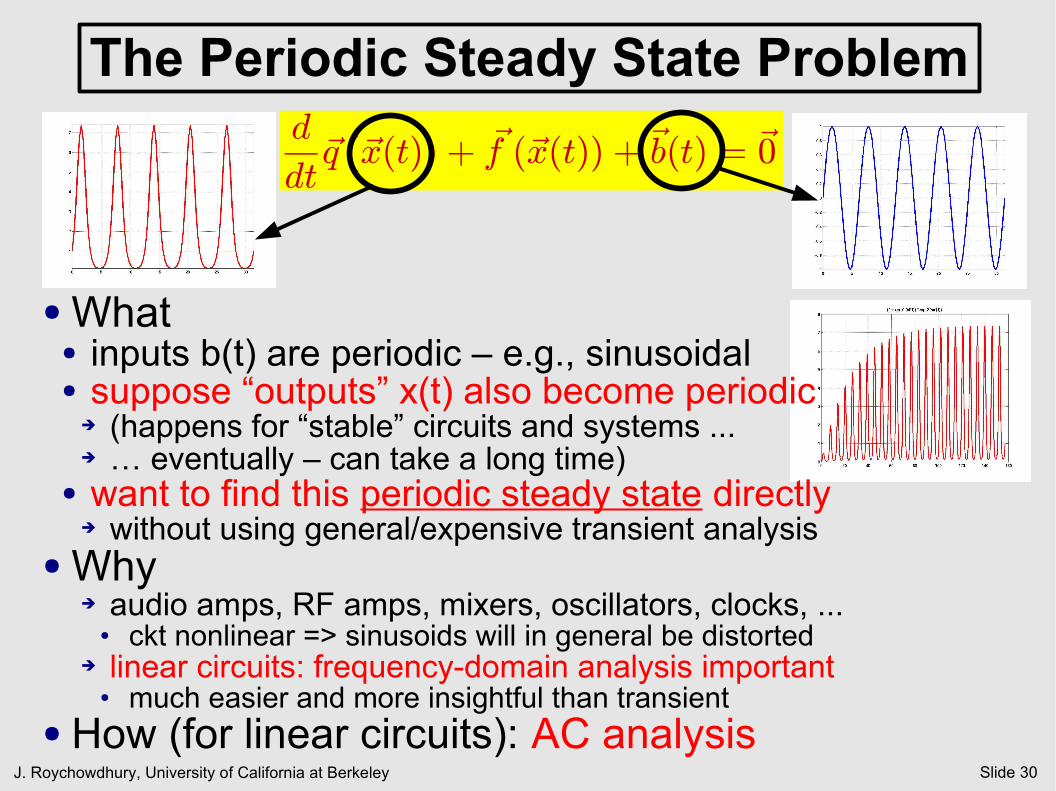
The Periodic Steady State Problem
● What● inputs b(t) are periodic – e.g., sinusoidal● suppose “outputs” x(t) also become periodic
➔ (happens for “stable” circuits and systems ...➔ … eventually – can take a long time)
● want to find this periodic steady state directly➔ without using general/expensive transient analysis
● Why➔ audio amps, RF amps, mixers, oscillators, clocks, ...
● ckt nonlinear => sinusoids will in general be distorted➔ linear circuits: frequency-domain analysis important
● much easier and more insightful than transient● How (for linear circuits): AC analysis
d
dt~q (~x(t)) + ~f (~x(t)) +~b(t) = ~0


![MonetaryEconomics Lecture1 TheNewKeynesianmodel/menu/... · 2012. 3. 30. · t −logY] AnotherexampleassumingY t = F (X t,Z t) = F elogXt,elogZt Y t ≈F (X,Z)+F x (X,Z)X [logX t](https://img.pdfslide.us/doc/110x75/608dd51bcbec24250167cf0d/monetaryeconomics-lecture1-the-menu-2012-3-30-t-alogy-anotherexampleassumingy.jpg)









![kamran/EE3301/class notes/ch7.pdf · y(t) = y transient + y steady state for t 0 y transient =[y(0) y( )]e t/ y steady state = y( ) for t 0 y transient = y(0)e t/ y( )e t/ for t 0](https://img.pdfslide.us/doc/110x75/5a9e94ef7f8b9a8e178b8eaa/kamranee3301class-notesch7pdfyt-y-transient-y-steady-state-for-t-0-y-transient.jpg)
















