Embed Size (px)
Citation preview

31
Chapter 2
Numerical wave modeling – Fundamentals,
Model setup and Validation
2.1. Introduction
This chapter describes the background of numerical wave modeling, the state-of-
the-art wave model MIKE 21 SW, the required data and the validation of the model
results. In relation to wave modeling, different classes of wave models are also discussed.
Description of MIKE 21 SW model consists of the governing equations, input parameters,
calibration parameters, numerical schemes, as well as initial and boundary conditions.
Initially, the model simulations are performed for a nine month period in order to evaluate
the model performance. In the final section of this chapter, there is a detailed discussion
related to the evaluation of model results. An evaluation of the model performance is
necessary to test the reliability of model results. Moreover, the evaluation of model
results is carried out using in-situ and altimeter observations in both fair weather and
extreme weather conditions.
2.2. Numerical Wave Modeling
The history of the study of ocean wave dynamics goes back several centuries, but
reasonable understanding of the physical properties of ocean waves start to develop in the
early twentieth century. With progress in the understanding of the wave dynamics that
took place, considerable attention has been paid to the modeling of ocean waves. The
importance of wind-induced sea surface wave prediction was realized during World War
II, when there arose a need for the planning of amphibious operations. Thereafter, the first
operational wave prediction techniques were developed by Sverdrup and Munk (1947)

Numerical wave modeling- Fundamentals, Setup and Validation 32
around that period. These techniques were based on the significant wave height concept,
in a purely statistical sense, where the spectral character of the sea state was completely
neglected. Interest in the prediction of the sea state started to grow by the middle of the
last century especially after the concepts of wave spectrum and its evolution were
recognized. In the fifties, the wave energy spectrum was introduced by Pierson et al.,
(1955). This wave spectrum concept was based on the assumption that the sea surface
may be represented as a Fourier series of superimposed waves with different wave
lengths and with different directions. The wave energy spectrum would then represent the
mean wave energy at each of these Fourier modes. Several statistical parameters
describing the sea state like significant wave height, mean wave direction and mean wave
period etc can be extracted from the wave energy spectrum. The spectral-energy balance
equation, which describes the development of surface gravity wave field in space and
time, forms the mathematical foundation of all numerical wave prediction models. Wave
models solve this equation using different numerical methods.
The energy balance equation is given (WMO, 1998) as,
. 2.1
, where, E Ef, , x, t, is the two dimensional wave spectrum depending on frequency
,f, and direction of propagation , Cg is the deep-water group velocity .
The source term expressed on the right-hand side of the equation is given by,
! 2.2 The source-sink mechanisms describe the wind input term (Sin), the nonlinear wave-wave
interaction (Snl), dissipation or whitecapping (Sds). The wind input source term represents
the momentum transfer by the winds to the free surface of the ocean. The nonlinear wave-
wave interaction source function (Hasselmann, 1962) provides the ways for energy to be
transferred between frequency bands. It was the principal mechanism for the

Numerical wave modeling- Fundamentals, Setup and Validation 33
downshifting of the peak frequency found in wind -generation wave growth field studies
(Hasselmann et al., 1973). Equation (2.1) is valid for deep water with no refraction and no
significant currents. Numerical solution of equation (2.1) is performed in two parts. The
time invariant portion of equation (2.1) is solved first for propagation of the energy in a
fixed grid system. The spectrum in a numerical wave model is comprised of individual
packets of energy described at each frequency and direction band. This solution assumes
linear superposition of energy. Thus each frequency and direction dependent component
can be treated independent of its neighbour. Once this step is performed, equation (2.1) is
solved for the temporal change of action that is effected by the source terms found in the
right hand side of the equation (Jensen, 2002). All wave models follow this procedure for
solving the energy balance equation.
2.2.1. First, second and third generation wave models
Wave models are classified in to first, second and third generation based on the
methods of handling nonlinear source term (WMO, 1998). First generation wave models
included only wave energy growth and dissipation. These models do not have an explicit
nonlinear wave-wave interaction function (Snl). Later, the importance of the wave-wave
interaction and its role in the distribution of energy in the spectrum has been studied.
Hence second generation wave models (e.g. Sea wave modeling project, SWAMP Group,
1985) include a parametric formulation of the nonlinear wave-wave interaction source
function. One critical assumption used in these models was that, the spectrum was to
conform to some pre-defined shape in frequency and direction, which means a reference
spectrum (e.g. JONSWAP spectral form, Hasselmann et al., 1973). Despite this
limitation, well tuned second generation wave model results compared well with the
increasingly available wave measurements. One significant outcome of the SWAMP
(SWAMP Group, 1985) was a rather large scale discrepancy in wave height estimates for

Numerical wave modeling- Fundamentals, Setup and Validation 34
simple academic tests. It was concluded that the Snl parameterization was the primary
cause for the order of magnitude differences found. The wave modeling group under the
direction of Professor Klaus Hasselmann worked with the goals to overcome the
deficiencies in second generation models and to subsequently implement a consistent set
of source terms centered about a better formulation of Snl, (Hasselmann and Hasselmann,
1985; Hasselmann et, al., 1985). Third generation wave models became feasible with the
development of the Discrete Interaction Approximation (DIA) (Hasselmann et, al., 1985)
to the nonlinear interactions. The DIA is the center piece of the first 3G wave model
(WAM). Currently, there are many 3G spectral wave models (e.g. SWAN (Booij et al.,
1999), WAVE-WATCH (Tolman, 1991), MIKE 21 SW (DHI, 2005), which are being
used for wave prediction and hindcast studies.
2.2.2. The unstructured grid approach
Traditionally, third generation spectral wave models are solved using either an
Eulerian or a semi-Lagrangian approaches on rectangular structured meshes. Even with
computers of today, these models are computationally highly demanding. To resolve the
characteristic scales of the important physical phenomena in the coastal areas a fine mesh
is required. In the breaking zone, a resolution of the order of 10m is needed. A high
resolution is also needed to resolve the complex bottom topographies in shallow water
environments (Sørensen et al., 2004). The need of high resolution local models can be
achieved by using nesting technique, where a local model with a fine mesh is embedded
in a coarse mesh model. Usually a one way transfer of boundary condition from the
coarse mesh model to the fine mesh model is used. With the goal of reducing the
computational effort, it is desirable to introduce more flexible meshes as an alternative to
nested models. Control of node distribution allows for optimal usage of nodes and
adaptation of mesh resolution to the relevant physical scales. Flexible mesh can be

Numerical wave modeling- Fundamentals, Setup and Validation 35
accomplished in a number of ways, e.g. multi block-curvilinear meshes, overlapping
meshes, local mesh refinement and unstructured meshes. Only a few examples of third
generation spectral model using flexible mesh have been presented. Recently, the
possibility of using curvilinear meshes has been implemented in the SWAN model (Booij
et al., 1999). Benoit et al. (1996) developed the model TOMAWAC based on semi-
Lagrangian approach, where an unstructured finite element technique was used for the
spatial discretization of the dependent variable. Practical applications may need new
numerical approaches such as unstructured grids.
MIKE 21 SW is a new generation spectral wind-wave model based on
unstructured meshes (Sörensen et al., 2004). Unstructured grid approaches are expected to
become more important for coastal applications. In coastal regions, the effect of tides,
surges and currents can be very important for accurate prediction of the wave conditions.
Due to the high degree of flexibility, unstructured meshes are very efficient to deal with
problems of different characteristic scales. For the maximum degree of flexibility, an
unstructured mesh approach has been chosen for this model. This feature of the model
makes its major application area as the design of offshore, coastal and port structures
where accurate assessment of wave loads is of utmost importance to the safe and
economic design of these structures. The source functions implemented in the MIKE 21
SW are based on state-of-the-art third generation formulations. MIKE 21 SW is used for
the assessment of wave climates in offshore and coastal areas in hindcast and forecast
mode. This is followed, in Section 2.3, by MIKE 21 SW model details and modeling
schemes.
2.3. MIKE 21 SW MODEL
MIKE 21 SW is the state-of-the-art third generation spectral wind-wave model
based on unstructured meshes developed by Danish Hydraulic Institute (DHI), Denmark.

Numerical wave modeling- Fundamentals, Setup and Validation 36
The model simulates the growth, decay and transformation of wind generated waves and
swells in offshore and coastal areas. MIKE 21 SW is particularly applicable for
simultaneous wave prediction and analysis on regional and local scale. MIKE 21 SW
includes the following physical phenomena: (i) Wave growth by action of wind, (ii) Non-
linear wave-wave interaction, (iii) Dissipation due to white capping, (iv) Dissipation due
to bottom friction, (v) Dissipation due to depth induced wave breaking, (vi) Refraction
and shoaling due to depth variations, (vii) Wave-current interaction, (viii) Effect of time-
varying water depth.
MIKE 21 SW includes two different formulations namely, directional decoupled
parametric formulation and fully spectral formulation (DHI, 2005). The directional
decoupled parametric formulation is based on a parameterization of the wave action
conservation equation. The parameterization is made in the frequency domain by
introducing the zeroth and first moment of the wave action spectrum as dependent
variables Holthuijsen (1989). The fully spectral formulation is based on the wave action
conservation equation, as described in e.g. Komen et al. (1994) and Young (1999), where
the directional–frequency wave action spectrum is the dependent variable. The first
formulation is suitable for near shore and the second one is suitable for both near shore
and offshore spectral wave modeling. As the study area contains shallow water and
offshore regions, the fully spectral formulation in terms of the wave direction, θ, and the
relative angular frequency has been chosen for the present study.
2.4. Model Setup
2.4.1. Model domain and Bathymetry
In the present study, the model domain covers the Indian Ocean region, 60˚S-
25˚N; 40˚E-100˚ E (Fig.2.1).

Numerical wave modeling- Fundamentals, Setup and Validation 37
Fig.2.1: Map of the study area showing flexible mesh grid
For the model runs, the spatial resolution has been chosen to be 0.25˚ in the coastal waters
and 1˚ for the rest of the region. This, however, does not mean that the resolution is
constant everywhere in this domain. MIKE21 SW model uses a flexible mesh bathymetry
for model runs. MIKE-21 has an in-built flexible mesh generator which generates flexible
bathymetry for model runs and the flexible mesh allows fine resolution near the coast.
The bathymetry is from GEBCO (details given in section 1.6 of Chapter 1).
2.4.2. Governing Equations
In the presence of dynamic depths and currents, the conserved quantity is wave
action (not energy) and the dynamics of gravity waves can be described by the
conservation equation for wave action density. In MIKE 21 SW model, the wind waves
are represented by the action density spectrum N(σ, θ). The independent phase parameters
have been chosen as the relative (intrinsic) angular frequency, σ=2πf, and the direction of

Numerical wave modeling- Fundamentals, Setup and Validation 38
wave propagation, θ. The governing equation is the wave action balance equation formulated
in either Cartesian or spherical co-ordinates (Komen et. al., 1994 and Young, 1999). For
small scale applications, the basic conservation equations are usually formulated in Cartesian
co-ordinates, while spherical polar co-ordinates are used for large scale applications.
The conservation equation for wave action can be written as,
" . #$" S
& 2.3 Where N (($,&, , is the action density, t is the time, ($ =(x, y), #$ = ()*,)+,),,)-) is the
propagation velocity of a wave group in the four-dimensional phase space,($, & and θ and S is the source term for the energy balance equation. is the four dimensional
differential operator in the ($, &, θ-space.
2.4.3. Source functions
The source term S on the right hand side of Eq. (2.3) represents the superposition
of source functions describing various physical phenomena and is given by,
S /0/12 S34 S42 S56 S70/ S689: 2.4
Here Sin represents the generation of energy by wind, Snl is the wave energy transfer due
to non-linear wave-wave interaction, Sdis is the dissipation of energy due to white
capping, Sbot is the dissipation due to bottom friction and Ssurf is the dissipation of energy
due to depth-induced wave breaking. The default source functions Sin , Snl, and Sds in
MIKE 21 SW are similar to the source functions implemented in the WAM Cycle 4
model (Komen et al.,1994).
2.4.4. Wind input
Wind wave generation is the process by which the wind transfers energy in to the
water body for generating waves. The wind input, Sin, is based on Janssen’s (1989, 1991)

Numerical wave modeling- Fundamentals, Setup and Validation 39
quasi-linear theory of wind-wave generation, where the momentum transfer from the
wind to the sea depends not only on the wind stress, but also on the sea state itself, and is
implemented as in WAM Cycle 4. In a series of studies by Janssen (1989) and Janssen
(1991), it is shown that the growth rate of the waves generated by wind also depends on
wave age. This is because of the dependence of the air drag on the sea state. The input
source term, Sin is given by,
<, = <, 2.5
, where γ is the growth rate. For a given wind speed and direction, the growth rate of
waves of a given frequency and direction depends on the friction velocity, ? *, and sea
roughness z0 In principle, if the sea roughness is known or assumed (e.g. the Charnock
parameter, @AB C@D/? FG, may be assumed) ,the wind friction speed can be estimated
using the logarithmic wind profile. Thus, the growth rate of waves due to wind input can
be calculated. Assuming a dimensionless sea roughness (@AB C@D/? FG) of 0.0144, this
formulation was shown in Komen et. al,(1994) to fit the observations compiled by Plant
(1982).
Two different formulations of air-sea interaction have been implemented in this
model. A “coupled” formulation means the momentum transfer from the wind to the
waves or drag depends not only on the wind but also on the waves according to the
formulation in Komen et al. (1994). An “uncoupled” formulation means the momentum
transfer from the wind to the waves solely depends on the wind speed, and consists of a
sea state independent roughness description. The default drag law is taken from Smith
and Banke (1975). In the present study a coupled formulation of air-sea interaction has
been used. A detailed description of wind fields used for driving the model in the present
study has been given in section 1.6 of Chapter one.

Numerical wave modeling- Fundamentals, Setup and Validation 40
2.4.5. Nonlinear Interactions
The nonlinear energy transfer amongst the different wave components of a
directional frequency spectrum plays a crucial role for the temporal and spatial evolution
of a wave field. The nonlinear energy transfer, Snl, through the four wave interaction is
represented by the discrete interaction approximate (DIA) used for the present study. The
DIA was developed by S. Hasselmann et al. (1985). The quadruplet-wave interaction
controls (i) the shape-stabilization of the high-frequency part of the spectrum, (ii) the
downshift of energy to lower frequencies and (iii) frequency-dependent redistribution of
directional distribution functions. The discrete interaction approximate (DIA) is the
commonly used parameterization of Snl in third generation wave models. This DIA has
been found quite successful in describing the essential features of a developing wave
spectrum (Komen et al., 1994).
2.4.6. Calibration Factors
2.4.6.1. White capping source function
The source function describing the dissipation due to white capping is based on
the theory of Hasselmann (1974), tuned according to Janssen (1989). With the
introduction of Janssen’s (1989) description of wind input, it was realized that the
dissipation source function needs to be adjusted in order to obtain a proper balance
between the wind input and the dissipation at high frequencies. The source function is
given by,
!&, H !IJGKDG L1 H M IIJ M NI
IJOGP &J"&, 2.6
Where Cds (Cdis) and δ (DELTAdis) are 4.5 and 0.5 as suggested in Komen et al.,
(1994). IJ is the mean wave number and KD is the zeroth moment of the spectra.

Numerical wave modeling- Fundamentals, Setup and Validation 41
2.4.6.2. Bottom friction source function
As wave propagates to the shallow water, the orbital velocities penetrate the water
depth and the source terms due to wave-bottom interaction processes become important.
The rate of dissipation, Sbot, due to bottom friction is based on linear theory (Weber, 1991)
and Johnson and Kofoed-Hansen, 2000). The friction coefficient is determined as the
product of a friction factor and the rms velocity at the bottom. The friction factor is
calculated using the expression by Jonsson (1966) and Jonsson and Carlson (1976). In the
expression by Jonsson the friction coefficient is determined as function of the bottom
roughness length scale, kN, and the orbital displacement at the bottom.
R&, HSI
TUVW2IW &, 2.7
Where Cf is the dissipation coefficient(=fw Ubm), which depends on the hydrodynamic and
sediment conditions. Here fw is the wave friction factor and Ubm is the maximum near-
bed particle velocity. MIKE 21 provides four dissipation formulations namely a constant
friction coefficient based on tests with regional versions of WAM model (Komen et al.,
1994), a constant friction factor proportional to rms wave orbital velocity at the bottom, a
constant geometric roughness size (Nikuradse roughness, kN, as suggested by (Weber et
al., 1991) in conjunction with friction factor expression of Jonsson and Carlsen(1976) and
a constant median sediment size D50. In the present study, the bottom friction is
considered according to Nikuradse roughness, kN. It is a calibration factor and the value
applied in the present study is 0.04 m.
2.4.6.3. Wave breaking source function
Depth-induced breaking occurs when waves propagate into very shallow areas,
and the wave height can no longer be supported by the water depth. The formulation of
wave breaking is based on the breaking model by Battjes and Janssen (1978). Eldeberky

Numerical wave modeling- Fundamentals, Setup and Validation 42
and Battjes (1995) proposed a spectral version of the breaking model, where the spectral
shape was not influenced by the breaking .The source term due to depth-induced breaking
can be written as,
!YZS&, H [\R&J ]G8` &,
2.8 Here α (=1) is a calibration constant controlling the rate of dissipation and is a proportional
factor to the wave breaking source function. Qb is the fraction of breaking waves, σJ is the
mean relative frequency, Etot is the total wave energy and Hb γd is the maximum
wave height. Here, γ is the free breaking parameter (a wave height to depth ratio). Kaminsky
and Kraus (1993) found that γ values are in the range between 0.6 and 1.59 with an average
of 0.79. The value of the breaking parameter, γ, varies from 0.5 to 1.0. In the present study,
γ = 0.8 has been applied.
2.4.7. Numerical method
2.4.7.1. Space Discretization
The spatial discretization of conservation equation for wave action is performed
using an unstructured finite volume (FV) method (DHI, 2005). During the last decade, FV
methods have been successfully applied for modeling of non-linear transport problems
and compressive flow problems. In the geographical domain, an unstructured mesh is
used. The spatial domain is discretised by subdivision of the continuum into non-
overlapping elements. The elements can be of arbitrarily shaped polygons, however, in
this model only triangles are considered. The action density, N (xJ, σ, θ) is represented as a
piecewise constant over the elements and stored at the geometric centres (DHI, 2005). In
the frequency space, a logarithmic discretization is used,
σ1 =σmin , σl =fσσl-1, ∆σl = σl-1- σl+1, l=2, Nσ (2.9)

Numerical wave modeling- Fundamentals, Setup and Validation 43
, where fσ is a given factor, σmin is the minimum discrete angular frequency and Nσ is the
number of discrete frequencies. In the directional space, an equidistant discretization is
used,
θm= (m-1)∆θ , ∆θm = 2π/Nθ , m = 1,Nθ (2.10) , where Nθ is the number of discrete directions. The action density is represented as a
piecewise constant over the discrete intervals, ∆σl and ∆θm, in the frequency and
directional space. In the present study, the minimum frequency is set to 0.055 Hz and the
number of frequencies is 25. For directional discretization, 360° rose has been considered.
The number of directions is set to 16.
Integrating the wave action conservation equation over area Ai of the ith element, the
frequency increment ∆σl and the directional increment ∆θm one obtains
∂∂t p∆θqp∆σrpstNdΩdσdθ H p∆θqp∆σrpstSσ
dΩdσdθ = p∆θqp∆σrpst. (FJ)dΩdσdθ (2.11)
Where Ω defines the differential element of the area Ai and FJ= (Fx,Fy,Fσ,Fθ) = νvN is the
convective flux. The volume integrals on the L.H.S of Eq. (2.11) are approximated by one
point quadrature rule. Using the divergence theorem, the volume integral on the right
hand side can be replaced by integral over the boundary of the volume in the xJ , σ, θ-
space and these integrals are evaluated using mid-point quadrature rule. Hence, Eq. (2.11)
can be written as,
∂N3,2,b∂t = H 1A3 xy(F4)z,2,b∆lz|
z~ H 1
∆σ2 (Fσ)3,2~/G,b H (Fσ)3,2~/G,b
H 1∆θb (Fθ)3,2,b~G H (Fθ)3,2,b~/G S3,2,b
σ2 (2.12)
Where NE is the total number of edges in the cell (NE=3 for triangles).

Numerical wave modeling- Fundamentals, Setup and Validation 44 F4z,2,b FN FNz,2,b, is the normal flux through the edge p in the geographical
space with length ∆lp. nJ =(nx , ny) is the outward pointing unit normal vector of the
boundary in the geographical space. Fσi,l+1/2,m and (Fθ)i,l,m+1/2 are the flux through the
face in the frequency and directional space, respectively.
The convective flux is derived using a first order upwinding scheme. The numerical
diffusion introduced using first order upwinding schemes can be significant, see e.g.
Tolman (1991, 1992). In small scale coastal applications and the application dominated
by the local wind, the accuracy obtained by using this scheme is considered to be
sufficient. However, for the case of swell propagation over long distances, higher-order
upwinding schemes may have to be applied.
2.4.7.2. Time integration
The time integration is based on a fractional step approach, where the propagation
step is solved using an explicit method. Firstly, a propagation step is performed
calculating an approximate solution at the new time level by solving Eq. (2.3) without
source terms. Secondly, a source term step is performed calculating the new solution from
the estimated solution taking into account only the effect of source terms.
The propagation step is carried out by an explicit Euler scheme. To overcome the severe
stability restriction, a multi sequence integration scheme is employed following the idea
by Vilsmeier and Hanel (1995). Here, the maximum time step is increased by locally
employing a sequence of integration steps, where the number of steps may vary from
element to element. Using the explicit Euler scheme, the time step is limited by the CFL
condition stated as
C9t,r,q C∆t∆x3
+ C∆t∆y3
+ Cσ ∆t∆σ2
+ Cθ ∆t∆θb
1 (2.13)

Numerical wave modeling- Fundamentals, Setup and Validation 45
Here C9t,r,qis the Courant number and ∆x3 and ∆y3 are characteristic length scale in the x
and y-directions for the ith element. The maximum local courant number, Crmax,i ,is
determined for each element in the geographical space, and the maximum local time step
is given by
∆^*, ∆Z,
2.14 To ensure accuracy in time, the intermediate levels have to be synchronized. The time
step index g is determined as the minimum value for which
∆ < ∆^*, , < ~G~
, g=1,2,3 (2.15)
The local time step is then determined as ∆ = ∆ <, two neighbouring elements are not
allowed to have an index difference greater than one.
The calculation is performed using a group concept and the computational speed-up using
the multi sequence integration compared to the standard Euler method increases with
increasing number of groups. However, to get accurate result in time, the maximum
number of groups must be limited (DHI, 2005). In the present work maximum number of
levels is 32.
2.4.8. Initial conditions
The initial conditions are applied by calculating the spectra from empirical
formulations. In the present study, JONSWAP fetch growth expression has been applied
to calculate the spectra. The following values are used for various parameters: maximum
fetch length: 100 km; maximum peak frequency: 0.4 Hz; maximum Philip’s constant:
0.0081; shape parameter, σa: 0.07; shape parameter, σb: 0.09; peakness parameter, γ: 3.3.
Numerical wave modeling- Fundamentals, Setup and Validation 46
2.4.9. Boundary Conditions
At the land boundaries in the geographical space, a fully absorbing boundary
condition is applied. The incoming flux components (the flux components for which the
propagation velocity is normal to the cell face is positive) are set to zero. No boundary
condition is needed for outgoing flux components. At an open boundary, the incoming
flux is needed. Hence, the energy spectrum has to be specified at an open boundary. In
the frequency space, the boundaries are fully absorbing. No boundary conditions are
needed in the directional space. In the present study, for wave simulations in the Indian
Ocean, all the boundaries were closed assuming that the influence of wave energy into the
Indian Ocean from the rest of the Oceans has negligible impact along the Indian coastal
regions. It means, no waves enter the model domain through this boundary and the
outgoing waves are fully absorbed.
2.4.10. Output parameters
At each mesh point and for each time step four types of output can be obtained
from MIKE 21 SW (i) Integral wave parameters (ii) Input parameters (iii) Model
parameters (iv) Spectral parameters.
The spectral parameters are wave energy and wave action. The directional-frequency
wave spectra at selected grid points and or areas as well as direction spectra and
frequency spectra can be obtained from MIKE 21 SW. We have used only the spectral
parameters and integral parameters for the present study.
The integral wave parameters can be computed for the total spectrum, for the wind sea
part of the spectrum and the swell part of the spectrum. The details of integral parameters
are given in Table 2.1.
Numerical wave modeling- Fundamentals, Setup and Validation 47
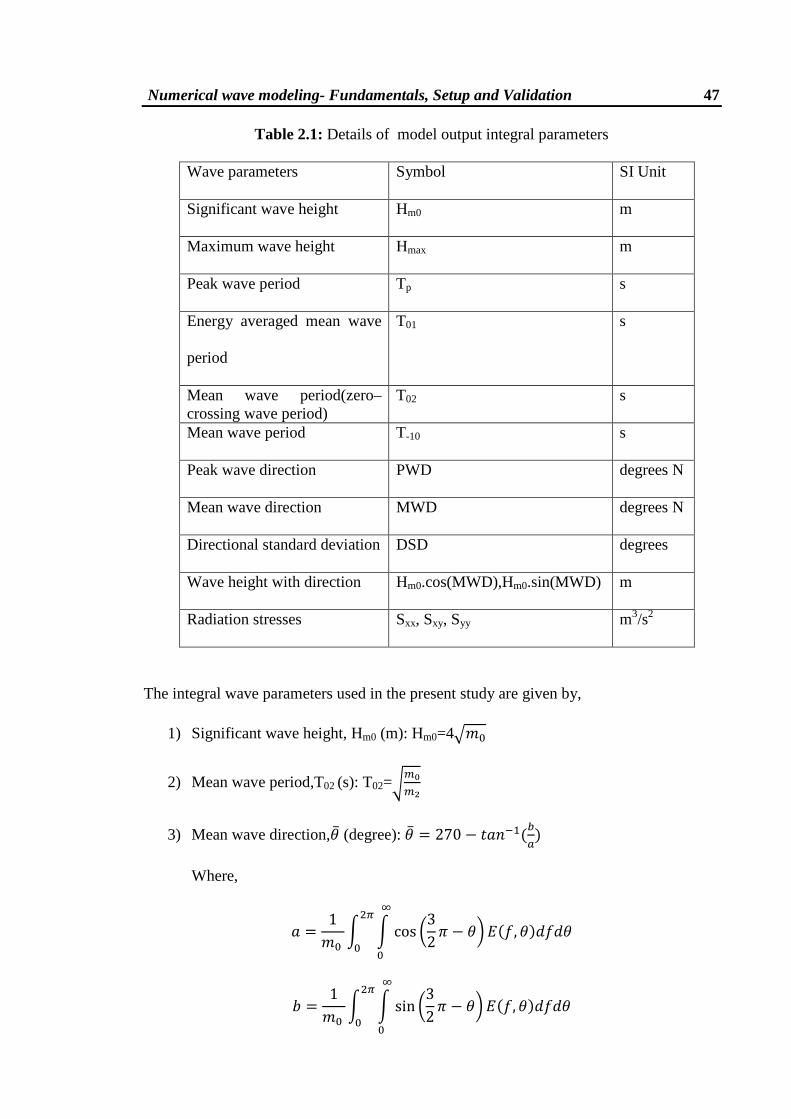
Table 2.1: Details of model output integral parameters
Wave parameters Symbol SI Unit
Significant wave height Hm0 m
Maximum wave height Hmax m
Peak wave period Tp s
Energy averaged mean wave
period
T01 s
Mean wave period(zero–crossing wave period)
T02 s
Mean wave period T-10 s
Peak wave direction PWD degrees N
Mean wave direction MWD degrees N
Directional standard deviation DSD degrees
Wave height with direction Hm0.cos(MWD),Hm0.sin(MWD) m
Radiation stresses Sxx, Sxy, Syy m3/s2
The integral wave parameters used in the present study are given by,
1) Significant wave height, Hm0 (m): Hm0=4KD
2) Mean wave period,T02 (s): T02=^^
3) Mean wave direction,$ (degree): $ 270 H V~R
Where,
1KD cos N3
2 ` H O <, <
D
GD
1KD sin N3
2 ` H O <, <
D
GD

Numerical wave modeling- Fundamentals, Setup and Validation 48
The distinction between wind-sea and swell can be calculated using either a constant
threshold frequency or a dynamic threshold frequency with an upper frequency limit. In
the present study a constant threshold frequency (=0.1 Hz) has been used for the
separation of wind-sea and swell as in the case of buoy data.
2.5. Model validation
Initially model run has been performed for a nine month period to evaluate the
model performance. The six hourly ECMWF blended wind analysis with a spatial
resolution of 0.25o has been used for this experiment (description of the wind field is
given in section 1.6 of Chapter 1). The model was initialized over a seven day period to
arrive at a stationary model output, and thereafter experiments were performed for the
period of January- September, 2006. Synoptic maps of wave parameters and time series
output for selected buoy location, both in shallow and off shore region, were generated
for the comparison. As mentioned earlier, wave data derived by moored buoys deployed
by the National Institute of Ocean Technology (NIOT) has been used for validating the
model results. Various statistical measures like Bias, Root Mean Square Error (RMSE),
Scatter Index (SI), and Correlation Coefficient (R) are used to assess the model
performance by comparing the model derived parameters against the corresponding
buoy/altimeter observations. The formulas for the statistical measures are,
Bias ~ ∑K¢ H £T 2.16
RMSE ~ ∑K¢ H £TG 2.17
SI RMSE/£TJJJJJ 2.18
§ ∑K¢ H K¢JJJJJ£T H £TJJJJJ∑K¢ H K¢JJJJJG£T H £TJJJJJG 2.19

Numerical wave modeling- Fundamentals, Setup and Validation 49
Here obs denotes a particular wave parameter derived by the buoy/altimeter and mdl is
the corresponding model wave parameter. The over bar denotes the statistical average.
In many applications, only the heights and periods of the higher waves in a wave
train are of practical significance. For this reason, the average height and period of the
highest one-third of the waves are useful statistical measures. These averages have been
called "significant wave height" and “mean wave period". So the model performance has
been evaluated in terms of significant wave height (Hs), and mean wave period (Tm) in
both Arabian Sea (AS) and Bay of Bengal (BoB) by selecting 3 buoys from each basin
( locations of the buoys are shown in Fig.1.4). Among the three buoys, two buoys were
located at the offshore region (DS7, DS1 in Arabian Sea and DS5, OB8 in Bay of Bengal)
and one was located at the shallow water (SW4 in Arabian Sea and SW6 in Bay of
Bengal). The data were continuous for the considered time period for deep water buoys
DS7, OB8. In the case of DS5, DS1 data were missing. The missing period was two
months (Jun-Jul) for DS5 whereas DS1 provided only three months (Jun.-Aug.). The
shallow water buoys selected for the validation provided a discontinuous data series. SW4
buoy which is located in the Arabian Sea provided only four months data whereas the
SW6 buoy present in the Bay of Bengal could provide only one month data. Figures 2.2-
2.4 show the comparison of model derived significant wave height (Hs) and mean wave
period (Tm) with the corresponding buoy derived parameters. These figures show that
wave heights are quite low till March except high waves in a few isolated cases. Wave
height starts to increase from the end of April till the end of monsoon period. Very high
waves are observed by deep water buoys located in the Arabian Sea. In the case of DS1
buoy, wave height of the order of 7m is observed in July and the model derived wave
height exhibited very good agreement with observed data in the extreme waves also. The
wave height in the Bay of Bengal was low compared to the wave height in the Arabian

Numerical wave modeling- Fundamentals, Setup and Validation 50
Sea, and the maximum height observed was around 4m. The model derived wave height
and mean wave period are in good agreement with the measured wave data in the shallow
water also. A very good agreement of buoy derived and model derived wave height can
be seen in for all the buoys in the low wave heights as well as in the extreme wave
heights. In the case of wave period a close match can be seen during most of the time but
in few cases mismatch are also noticeable.
Fig 2.2: Comparison of significant wave height and mean wave period for Arabian Sea
deep water Buoys (a) At DS7 Buoy location (b) At DS1 Buoy location

Numerical wave modeling- Fundamentals, Setup and Validation 51
Fig 2.3: Comparison of significant wave height and mean wave period for Bay of Bengal
deep water Buoys (a) At DS5 Buoy location (b) At OB8 Buoy location

Numerical wave modeling- Fundamentals, Setup and Validation 52
Fig.2.4: Comparison of significant wave height and mean wave period for shallow water
Buoys (a) At SW4 Buoy location in the Arabian Sea (b) At SW6 Buoy location in the
Bay of Bengal

Numerical wave modeling- Fundamentals, Setup and Validation 53
For a detailed evaluation of model performance, statistical error analysis has been carried
out. Table 2.2 shows the error statistics of the comparison of all the buoys for both the
basins. The number of points, Bias, RMSE, Scatter Index (SI) and Correlation Coefficient
(R) of each buoy are given in Table 2.2.
Table 2.2: Model error statistics for the buoy comparison
Buoy No. of
Points
Parameters BIAS RMSE SI R
DS7
2075
Hs(m) 0.18 0.34 0.21 0.94
Tm(s) 0.49 0.92 0.15 0.76
DS1
814
Hs(m) -0.11 0.39 0.12 0.95
Tm(s) 0.46 0.68 0.10 0.84
OB8
2031
Hs(m) -0.08 0.24 0.17 0.92
Tm(s) -0.28 0.65 0.12 0.70
DS5
1737
Hs(m) 0.00 0.26 0.17 0.94
Tm(s) -0.30 0.91 0.15 0.69
SW4
1080
Hs(m) 0.09 0.16 0.24 0.70
Tm(s) 0.37 0.81 0.17 0.57
SW6
219
Hs(m) -0.32 0.39 0.28 0.69
Tm(s) -0.43 0.72 0.13 0.43
From Table 2.2, it can be seen that the simulated significant wave height values are in
good agreement with measured data with RMSE values ranging from 0.16-0.4 m. DS5
buoy shows a very good agreement in the case of wave height with practically no bias,
very low RMSE as well as SI and a good correlation. In the case of wave period a very
low scatter index was seen in all the buoys and the RMSE values were in the range of
0.65-0.92 s. High correlation is observed at four deep sea locations compared to that of
Numerical wave modeling- Fundamentals, Setup and Validation 54
shallow water. The lower correlation at the coastal buoys may be due to the combined
effect of bottom topography and less accurate wind input. The error statistics clearly show
that model simulated waves are in good agreement with a low error and model is able to
simulate waves well, both in shallow and deep water regions. Model results also clearly
bring out wave patterns during the phases of pre-monsoon and monsoon. The validation
exercise establishes the reliability of the model in simulating the intra-annual variability
of wave characteristics in North Indian Ocean. Summarizing, it can be said that MIKE 21
SW is able to provide good quality simulation of wave characteristics at all the locations.
2.5.1. Evaluation of model performance during cyclonic condition
In the year 2006, during the period April 24-April 29, a very severe cyclone
occurred in the Bay of Bengal. In the central Bay of Bengal, an area of disturbed weather
developed into depression on April 24 and by 09 UTC 25of April 2006, it was turned into
deep depression stage (IMD, 2006). Then the system became cyclonic storm after 12
UTC 25 April 2006. The system remained in cyclonic stage up to 00 UTC 27 April 2006.
Then around 03 UTC 27 April 2006, it became severe cyclonic storm with central
pressure of 990 hPa and the maximum sustainable wind of 55 kts. The system became
very severe cyclonic storm (VSCS) by 12 UTC 27 of April 2006 with the central mean
sea level pressure of 984 hPa and the maximum surface wind of 65 kts. The storm
remained in VSCS phase for a period of 42 hours i.e up to 06 UTC 29 April 2006. The
maximum observed central pressure was 954 hPa and the observed maximum sustainable
surface wind was 100 kts. The very severe cyclonic storm crossed the Arakan coast of
around 07 UTC of 29 April 2006. The system remained on the land for further 12 hours
and caused a lot of devastation in the nearby coastal areas. Buoys were not available
along or near the cyclone track. “Mala” was a very severe cyclone. Thus its effect was
observed in other buoys located in Bay of Bengal. Two buoys MB10, off Mahabalipuram,

Numerical wave modeling- Fundamentals, Setup and Validation 55
located at 84.983o E longitude and 12.54oN latitude and DS5, off Machillipatanam,
located at 83.267o E longitude and 13.974oN latitude have been selected for comparison
purpose. Fig.2.5 shows the location of the buoys and the cyclone track. The growth and
decay of waves during this event has been observed by both the buoys.
Fig.2.5: The location of buoys and the cyclone track
A comparison of wind speed and wave height has been carried out to see the performance
of the model during extreme conditions. Fig.2.6 shows a time series comparison of wind
speed and wave height with similar quantities measured by the buoy. Among the two
buoys considered, MB10 buoy was near to the cyclone track compared to DS5 buoy. So
the observation of growth and decay of the wave observed was very clear in the case of
MB10 buoy. Figure 2.6 shows the time series of wind speed and wave height for a 15
days period from 22 April- 6 May. In the case of MB10 buoy, the wave height before
cyclone was around 1 m, from 24th April onwards, wave height started increasing and
reached a maximum height around 3m, and after the cyclone, the wave height started
decreasing and reached around 1m as in the initial period. Very good agreement of wind

Numerical wave modeling- Fundamentals, Setup and Validation 56
speed and wave height can be seen in the case of MB10 buoy. Almost same type of wave
growth and decay is seen in DS5 buoy also. The wave height before cyclone was around
1 m. As the cyclone peaked the wave height reached a maximum height of around 2.5 m.
After the cyclone, the wave height started decreasing and reached around 1m as in the
initial period.
Fig.2.6: Plot showing wind speed and wave height variation during cyclone

Numerical wave modeling- Fundamentals, Setup and Validation 57
The two buoys selected were far from the cyclone track. To evaluate the model
performance during extreme conditions, a comparison with Jason 1 altimeter track data
has also been carried out. None of the track was passing exactly over the cyclone. Hence
a track which is closest to the cyclone has been selected for comparison.
Fig.2.7: Synoptic map of wind speed and model derived wave height
with altimeter track overlaid

Numerical wave modeling- Fundamentals, Setup and Validation 58
Fig 2.7 shows a comparison of wind speed and wave height with altimeter data by
overlaying the altimeter track on model output. The selected time period was 23:00 GMT
28th April 2006.The maximum significant wave height at this time was 7.1 m. The
maximum significant wave height along the track was around 6 m. A very good
agreement of wave height can be seen along the track. The mismatch in wave height is
mainly because of the mismatch in wind speed. This is very clear in Fig 2.7.
The comparison of model derived wave heights with altimeter and buoy derived wave
heights during cyclonic condition shows the ability of the model to provide reliable wave
predictions even during extreme weather conditions.