Embed Size (px)
Citation preview
November 21, 2014Mars Cubesat/Nanosat Workshop
Flux-Pinned Interfaces for Martian Applications
Laura JonesG&C Systems Engineer, Jet Propulsion Laboratory, California Institute of [email protected]
Based in part from work done atCornell University
Pre-Decisional Information -- For Planning and Discussion Purposes Only
Pre-Decisional Information -- For Planning and Discussion Purposes Only

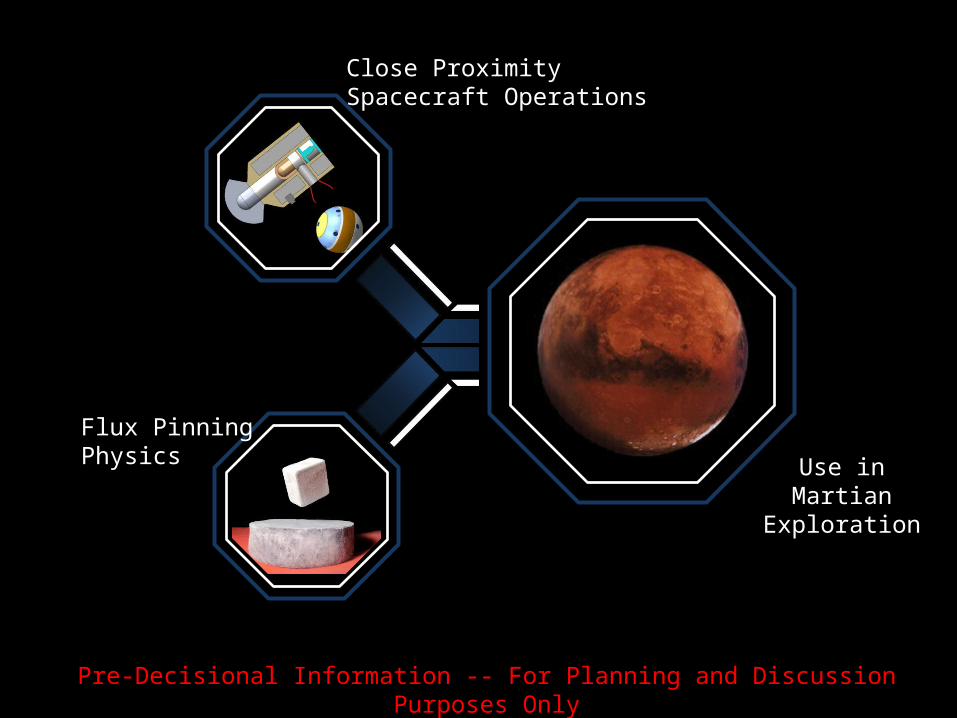
Close Proximity Spacecraft Operations
Martian Exploration
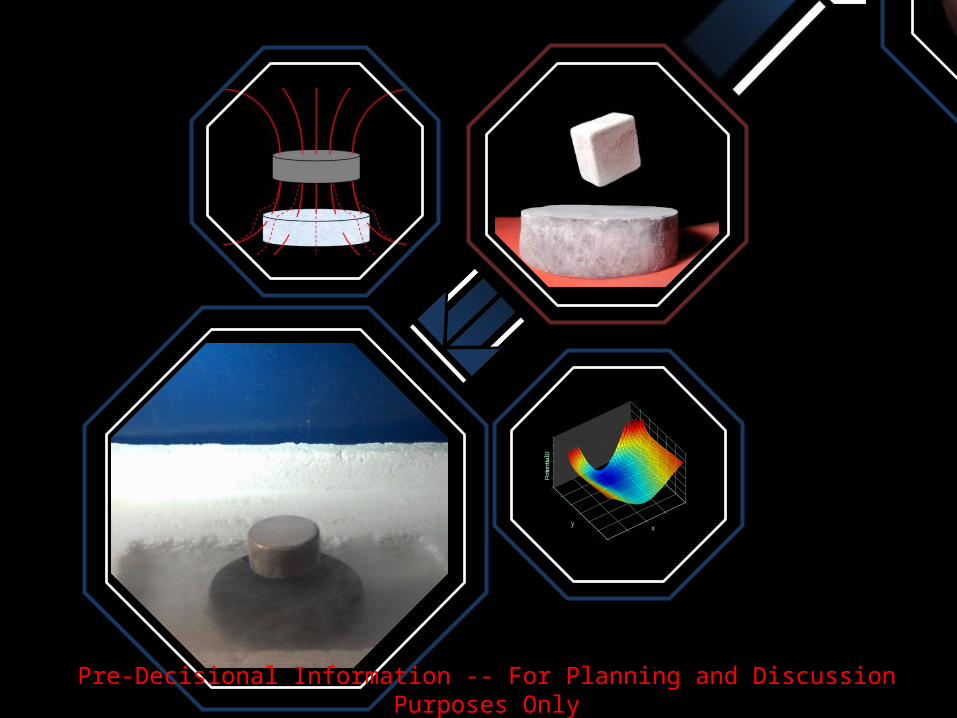
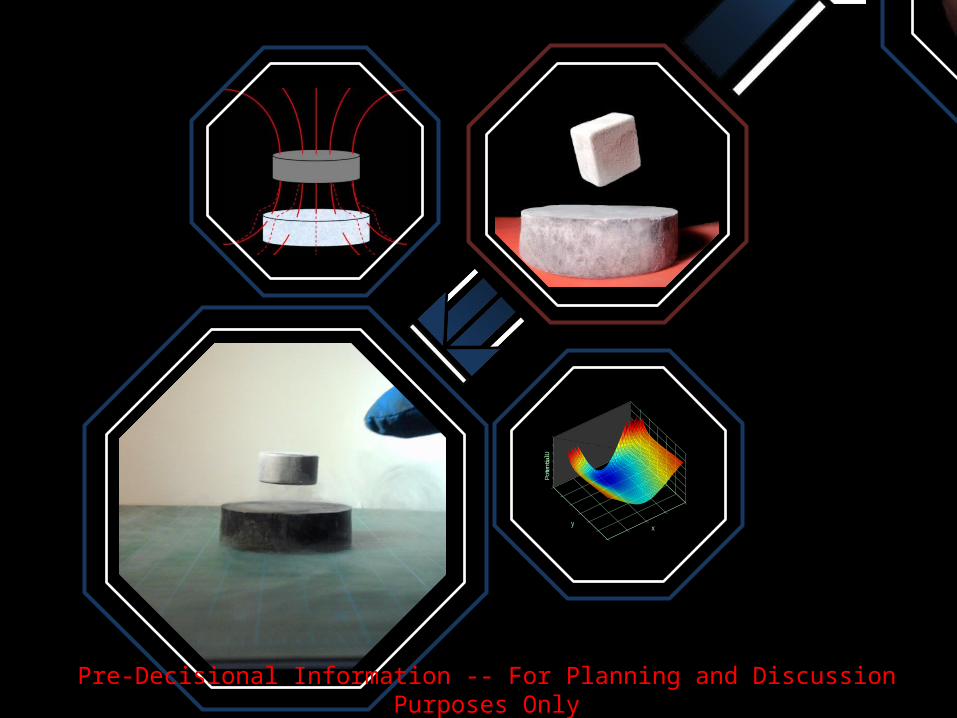
Flux Pinning Physics
Pre-Decisional Information -- For Planning and Discussion Purposes Only

Close Proximity Spacecraft Operations
Martian Exploration
Flux Pinning Physics
Pre-Decisional Information -- For Planning and Discussion Purposes Only
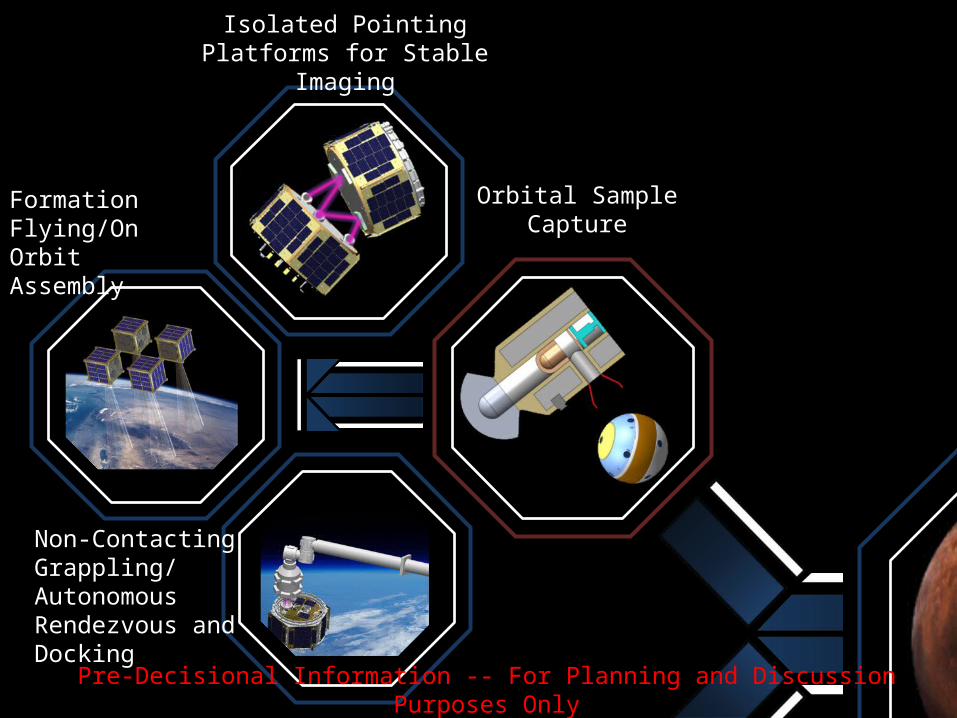
Isolated Pointing Platforms for Stable
Imaging
Formation Flying/On Orbit Assembly
Non-Contacting Grappling/ Autonomous Rendezvous and Docking
Orbital SampleCapture
Pre-Decisional Information -- For Planning and Discussion Purposes Only
Pre-Decisional Information -- For Planning and Discussion Purposes Only

Close Proximity Spacecraft Operations
Flux Pinning Physics Use in Martian
Exploration
Pre-Decisional Information -- For Planning and Discussion Purposes Only
xy
Pote
ntia
l U
Pre-Decisional Information -- For Planning and Discussion Purposes Only
xy
Pote
ntia
l U
Pre-Decisional Information -- For Planning and Discussion Purposes Only
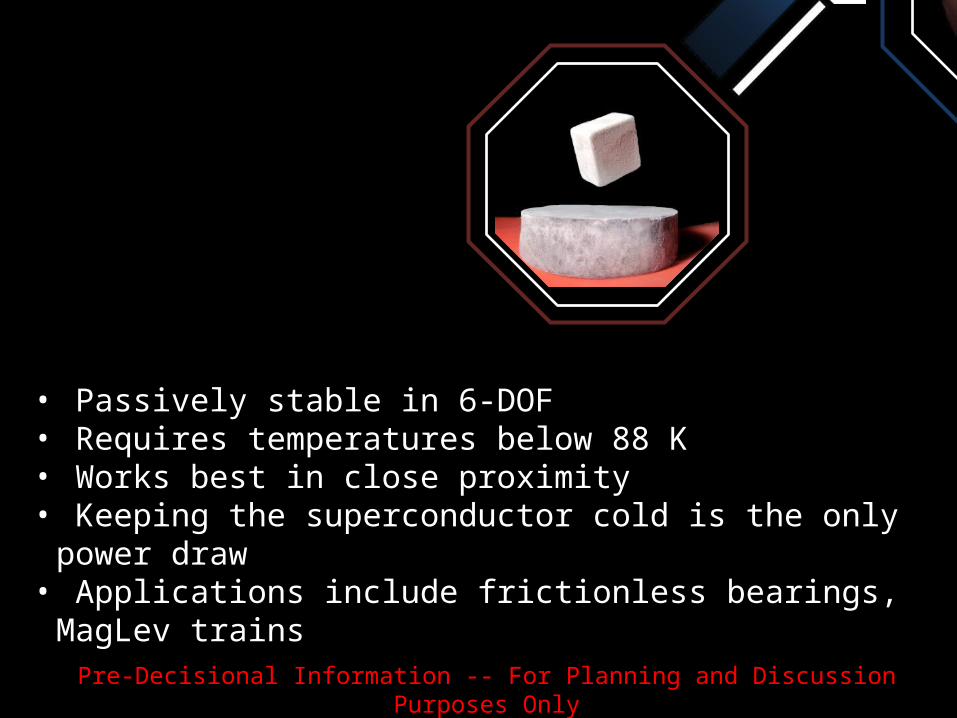
• Passively stable in 6-DOF• Requires temperatures below 88 K• Works best in close proximity• Keeping the superconductor cold is the only power
draw• Applications include frictionless bearings, MagLev
trainsPre-Decisional Information -- For Planning and Discussion Purposes Only

Pre-Decisional Information -- For Planning and Discussion Purposes Only
Close Proximity Spacecraft Operations
Use in Martian
Exploration
Flux Pinning Physics
Pre-Decisional Information -- For Planning and Discussion Purposes Only
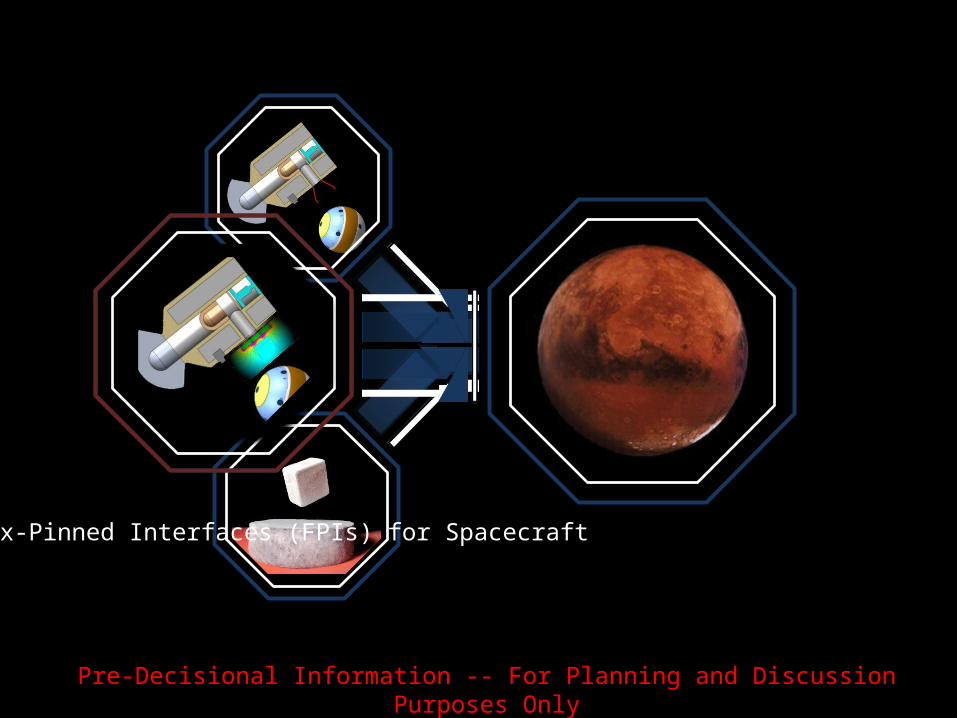
Flux-Pinned Interfaces (FPIs) for Spacecraft
Pre-Decisional Information -- For Planning and Discussion Purposes Only

Pre-Decisional Information -- For Planning and Discussion Purposes Only
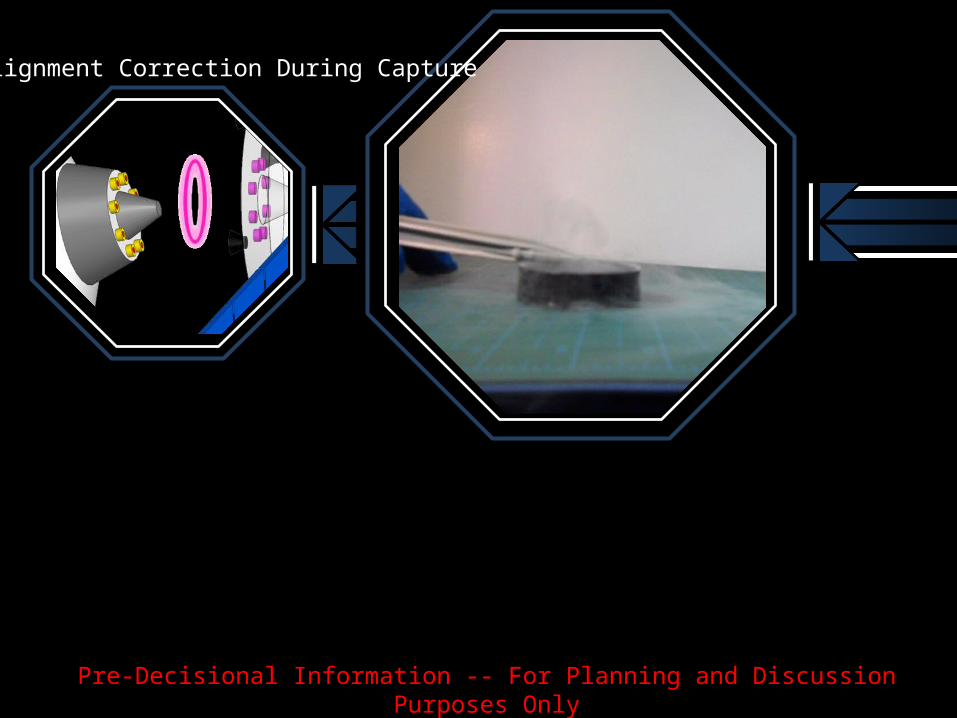
Alignment Correction During Capture
Pre-Decisional Information -- For Planning and Discussion Purposes Only

Pre-Decisional Information -- For Planning and Discussion Purposes Only
Alignment Correction During Capture
Capture Impact
Attenuation

Pre-Decisional Information -- For Planning and Discussion Purposes Only
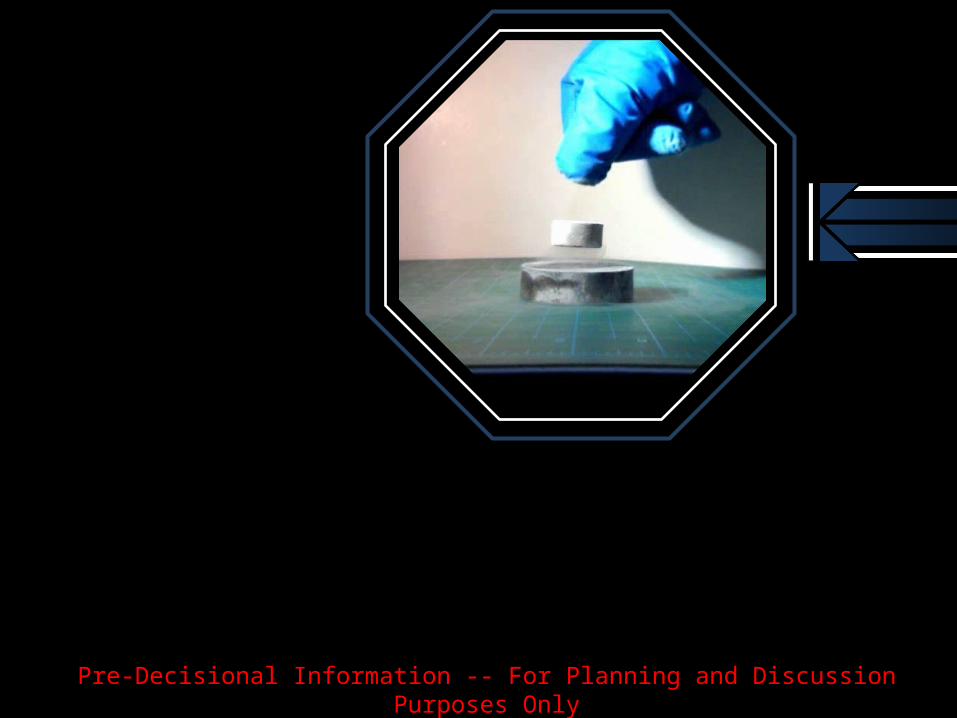
Alignment Correction During Capture
Non-Contacting OS Manipulation for
CleaningCapture Impact
Attenuation
Pre-Decisional Information -- For Planning and Discussion Purposes Only
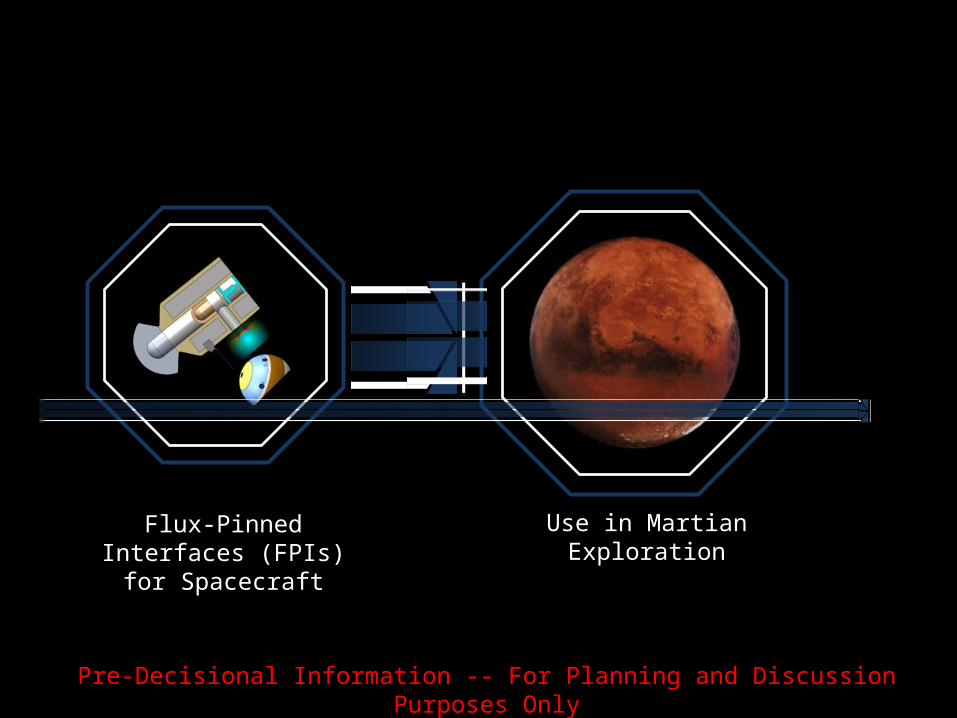
Flux-Pinned Interfaces (FPIs) for Spacecraft
Use in Martian Exploration
Pre-Decisional Information -- For Planning and Discussion Purposes Only
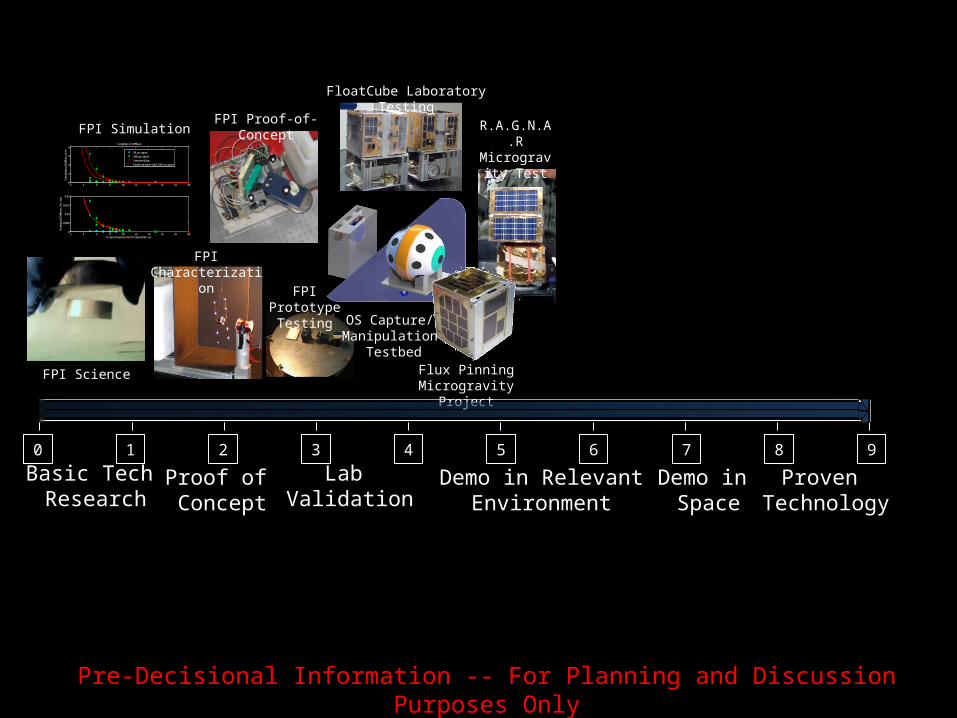
10 2 3 4 5 6 7 8 9
Basic Tech Research
Proven Technology
Proof of Concept
Demo in Space
Demo in Relevant Environment
Lab Validation
R.A.G.N.A.R Microgravity
Test
Flux Pinning Microgravity Project
FloatCube Laboratory Testing
FPI Proof-of-Concept
FPI Prototype Testing
FPI Simulation
FPI Science
2 4 6 8 10 12 14 16 18 200
2
4
6
8Variation in Stiffness
Tran
slati
onal
Stiff
ness
, N/m
2 4 6 8 10 12 14 16 18 200
0.005
0.01
0.015
0.02
Magnet-superconductor separation, cm
Rota
tiona
l Stiff
ness
, N m
/rad
30 g magnet100 g magnetFree pendulumFrozen-image model, 100 g magnet
FPI Characterization
CubeSat Orbital Demo
FPIs Used on Missions
Nanosatellite FPI Orbital
DemoOS Capture/
Manipulation Testbed
Pre-Decisional Information -- For Planning and Discussion Purposes Only

OS Capture/ Manipulation
Testbed
The ability to attract and remotely manipulate an orbiting sample may provide the key to breaking the chain of Martian debris and contamination, which must be addressed before MSR is attempted. By preserving the concept of a passive OS, this solution also maintains the integrity of sample-to-orbit designs.
• Capture (attractive forces bring in OS with given initial conditions)
• Proximity operations (stabilize the OS from its initial conditions, manipulate SRO to be in control of OS dynamics)
• Trapping/Cleaning/Sterilizing operations (actively manipulate the OS and maintaincontrol in the presence of cleaning forces/torques)
• Docking (bring the separation distance of the OS-SRO to zero)
Flux-Pinned Orbiting Sample Capture (FPOS) R&TDCo-Is: Joe Parrish (6x), Mason Peck (Cornell University)
Pre-Decisional Information -- For Planning and Discussion Purposes Only





























