Embed Size (px)
Citation preview

Nonlinear equations (cont.) and Optimization inOctave
Agnes Baran, Csaba Noszaly
Agnes Baran, Csaba Noszaly Nonlinear equations (cont.) and Optimization in Octave 1 / 31

Example
Division is sometimes a hard task, but in order to divide we do not actuallyneed to perform any division.For a given a ∈ R compute (approximate) 1
a . Define a function, which is
zero at 1a :
f (x) = a− 1
xand f ′(x) =
1
x2
Set up the Newton-iteration:
xk+1 = xk(2− a · xk)
And voila:
>> iter = @(x,a) x*(2-a*x) ;>> a=3;x=0.3;
Agnes Baran, Csaba Noszaly Nonlinear equations (cont.) and Optimization in Octave 2 / 31

>> x=iter(x,a)x = 0.330000000000000>> x=iter(x,a)x = 0.333300000000000>> x=iter(x,a)x = 0.333333330000000>> x=iter(x,a)x = 0.333333333333333
Agnes Baran, Csaba Noszaly Nonlinear equations (cont.) and Optimization in Octave 3 / 31

Example
Computing the normed version of a vector is a general task in numericalmath:
x = (x1, . . . , xn) → (x1, . . . , xn)
||x ||2It is somewhat surprising, that it can computed (approximately) withoutany division and ”squarerooting”. Let us examine the equation:
f (x) = a− 1
x2
It is clear, that f ( 1√a
) = 0, so we can apply the Newton method.
Agnes Baran, Csaba Noszaly Nonlinear equations (cont.) and Optimization in Octave 4 / 31

ExerciseDevelop the corresponding iterating rule.
ExerciseCompute the normed version of the vectors.
(1, 1), (−3, 2), (−6,−1)
Compare the results with the output of the builtin functions.
ExerciseCompute the normed version of the vectors, but this time use the 1-norm!
(1, 1), (−3, 2), (−6,−1)
Compare the results with the output of the builtin functions.
Agnes Baran, Csaba Noszaly Nonlinear equations (cont.) and Optimization in Octave 5 / 31

Optimization intro
For a given f : [a, b]→ R we search for a point ξ ∈ (a, b) for which
f (ξ) ≤ f (x)
if |x − ξ| is small enough. We say that f (ξ) is a local minimum and ξ is alocal minimizer. We know from calculus that
f ′(ξ) = 0
at a local minimizer.Example
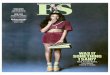
Find a local minimizer for
f (x) = x5 − cos(x)− ex
on [0, 1] with the Newton method. First, we examine the plot of it:
Agnes Baran, Csaba Noszaly Nonlinear equations (cont.) and Optimization in Octave 6 / 31

-2.7
-2.6
-2.5
-2.4
-2.3
-2.2
-2.1
-2
0 0.2 0.4 0.6 0.8 1
Agnes Baran, Csaba Noszaly Nonlinear equations (cont.) and Optimization in Octave 7 / 31

Now it is clear that our function has a local minimizer on [0, 1]. Aftercomputing the derivatives:
f ′(x) = 5x4 + sin(x)− ex and f ′′(x) = 20x3 + cos(x)− ex
we can easily approximate the root of f ′, which is a minimizer of f withOctave:
Agnes Baran, Csaba Noszaly Nonlinear equations (cont.) and Optimization in Octave 8 / 31

>> f=@(x) x.ˆ5-cos(x)-exp(x);>> df=@(x) 5*x.ˆ4+sin(x)-exp(x);>> ddf=@(x) 20*x.ˆ3+cos(x)-exp(x);>> x=0.7x = 0.700000000000000>> x=x-df(x)/ddf(x)x = 0.730125169245811>> x=x-df(x)/ddf(x)x = 0.728187065551714>> x=x-df(x)/ddf(x)x = 0.728178496917075>> x=x-df(x)/ddf(x)x = 0.728178496750211>> x=x-df(x)/ddf(x)x = 0.728178496750211
Agnes Baran, Csaba Noszaly Nonlinear equations (cont.) and Optimization in Octave 9 / 31

In Octave, we have two possibilities for computing the zeros:The function fzero can be used for univariate functions. By default, itneeds an initial bracketing (an interval that consists the zero), but can beused also without specifying it:
>> fzero(df, [0, 1])ans = 0.728178496750212>> fzero(df, 0.6)ans = 0.728178496750211
The function fsolve can be applied for multivariate functions. Here weonly have to specify an initial guess of the zero:
>> fsolve(df, 0.6)ans = 0.728178501057600
As we see, the results can be differ slightly. Their behaviour can be finetuned, through setting appropriate parameters, for details see the help.
Agnes Baran, Csaba Noszaly Nonlinear equations (cont.) and Optimization in Octave 10 / 31

Example
Of all right angled triangle with a given hypotenuse,find that whose area isthe greatest. Denote the length of the hypotenuse by c and by x one ofthe other sides. Applying the Pythagorean theorem we get
√c2 − x2 for
the third side, therefore the area of our triangle is
A(x) = 0.5x√
c2 − x2
where 0 < x < c. Now, in order to avoid the difficulties of computing thederivatives, we omit the factor 0.5 and take square of the remainingexpression:
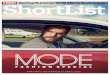
(2 ∗ A(x))2 = B(x) = x2(c2 − x2) = c2x2 − x4
Let us examine the plot of B with c = 1:
Agnes Baran, Csaba Noszaly Nonlinear equations (cont.) and Optimization in Octave 11 / 31

0
0.05
0.1
0.15
0.2
0.25
0 0.2 0.4 0.6 0.8 1
Agnes Baran, Csaba Noszaly Nonlinear equations (cont.) and Optimization in Octave 12 / 31

kett
Agnes Baran, Csaba Noszaly Nonlinear equations (cont.) and Optimization in Octave 13 / 31

Apply again the Newton method and compare the result with the outputof fzero :
>> B=@(x,c) cˆ2*x.ˆ2-x.ˆ4 ;>> dB=@(x,c) 2*cˆ2*x-4*x.ˆ3 ;>> ddB=@(x,c) 2*cˆ2-12*x.ˆ2 ;>> c=1;>> x=0.7x = 0.700000000000000>> x=x-dB(x,1)/ddB(x,1)x = 0.707216494845361>> x=x-dB(x,1)/ddB(x,1)x = 0.707106806711824>> x=x-dB(x,1)/ddB(x,1)x = 0.707106781186549>> x=x-dB(x,1)/ddB(x,1)x = 0.707106781186548>> fzero(@(x)dB(x,1),0.7)
Agnes Baran, Csaba Noszaly Nonlinear equations (cont.) and Optimization in Octave 13 / 31

fsolve for multivariate vector-function
Example
Solve the system below for x1, x2.
−4x1 + cos(2x1 − x2) = 3
−3x2 + sin x1 = 2 x1, x2 ∈ [−π, π]
Solution:
>> f=@(x) [ -4*x(1)+cos(2*x(1)-x(2))-3; -3*x(2)+sin(x(1))-2 ];>> x0=[0;0];>> [z,fz]=fsolve(f,x0)z =
-0.504059590609616-0.827661401511504
fz =-3.96460109186592e-093.15550252594221e-10
Agnes Baran, Csaba Noszaly Nonlinear equations (cont.) and Optimization in Octave 14 / 31

fsolve for multivariate real-function
Example
Solve the system below for x1, x2.
−4x1 ∗ (2− x2) + cos(2x1 − x2) = 3
First we plot the function:
>> xx=linspace(-pi,pi);>> [X,Y]=meshgrid(xx,xx);>> Z=X.*Y+cos(2*X-Y)+1;>> plot3(X,Y,Z)
Agnes Baran, Csaba Noszaly Nonlinear equations (cont.) and Optimization in Octave 15 / 31

-4-3-2-101234-4 -3 -2 -1 0 1 2 3 4
-10
-5
0
5
10
Agnes Baran, Csaba Noszaly Nonlinear equations (cont.) and Optimization in Octave 16 / 31

fsolve for multivariate real-function
Explanation:https://octave.sourceforge.io/octave/function/meshgrid.html
Agnes Baran, Csaba Noszaly Nonlinear equations (cont.) and Optimization in Octave 17 / 31

optimization with built-in functions
There is a simpler way to find a minimizer for a univariate function, wecan apply the function fminbnd . We pass a function and an interval, andfminbnd tries to find the minimal value on the given interval:
>> B=@(x) -x.ˆ2 + x.ˆ4 ;>> [xopt, fopt]=fminbnd(B,0.1,1)xopt = 0.707106781164670fopt = -0.250000000000000
Note that we changed the sign of the function B in order to getmaximization problem.
Agnes Baran, Csaba Noszaly Nonlinear equations (cont.) and Optimization in Octave 18 / 31

ExerciseFind a local minimizer for
f (x) = x5 − cos(x)− ex
using fminbnd .
ExerciseFind a local minimizer for
f (x) = xx − cos(x)− 0.1 · ex
using fminbnd .
Agnes Baran, Csaba Noszaly Nonlinear equations (cont.) and Optimization in Octave 19 / 31

optimization of multivariate functions
We look for the local minimizers of the function:
f (x1, x2) = x31 + x32 − 3x1 − 3x2
on [−2, 2]× [−2, 2]To get an overview of a function, we create its plot:
>> xx=linspace(-2,2);>> [X,Y]=meshgrid(xx,xx);>> Z=X.ˆ3+Y.ˆ3-3*X-3*Y;>> plot3(X,Y,Z)
Agnes Baran, Csaba Noszaly Nonlinear equations (cont.) and Optimization in Octave 20 / 31

-2-1.5-1
-0.500.511.5
2
-2-1.5-1-0.500.511.52-4-3-2-101234
Agnes Baran, Csaba Noszaly Nonlinear equations (cont.) and Optimization in Octave 21 / 31

The optimization methods often need an initial guess to start the process.You can guess good starting points, vectors by examining the contour plot.https://en.wikipedia.org/wiki/Contour_line
xx=linspace(-2,2);yy=xx;[X,Y]=meshgrid(xx,yy);Z=X.ˆ3+Y.ˆ3-3*X-3*Y;figure; contour(X,Y,Z)axis equal
Agnes Baran, Csaba Noszaly Nonlinear equations (cont.) and Optimization in Octave 22 / 31

-1.5
-1
-0.5
0
0.5
1
1.5
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
Agnes Baran, Csaba Noszaly Nonlinear equations (cont.) and Optimization in Octave 23 / 31

Another useful plot for R2 → R functions is a gradient plot.https://en.wikipedia.org/wiki/GradientIts most important property: the gradient at (x1, x2) has the direction ofgreatest increase of the function at (x1, x2).The corresponding Octave code:
xx=linspace(-2,2,11); yy=xx;[X,Y]=meshgrid(xx,yy);dX=3*X.ˆ2-3;dY=3*Y.ˆ2-3;hold on; quiver(X,Y,dX,dY)
Agnes Baran, Csaba Noszaly Nonlinear equations (cont.) and Optimization in Octave 24 / 31

-1
-0.5
0
0.5
1
1.5
2
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
Agnes Baran, Csaba Noszaly Nonlinear equations (cont.) and Optimization in Octave 25 / 31

optimization with built-in functions
The function fminsearch uses derivative-free method to approximate thelocal minimizer. The parameters: the function handle and the initial guess:
>> f=@(x) x(1)ˆ3+x(2)ˆ3-3*x(1)-3*x(2);>> [xo,fxo]=fminsearch(f,[0.5,0.5])xo =
0.999961405649954 1.000002133792563
fxo = -3.99999999551783
Agnes Baran, Csaba Noszaly Nonlinear equations (cont.) and Optimization in Octave 26 / 31

optimization with built-in functions
The function fminunc uses derivative-based method to approximate thelocal minimizer. The parameters: the function handle and the initial guess:
>> f=@(x) x(1)ˆ3+x(2)ˆ3-3*x(1)-3*x(2);>> [xo,fxo]=fminunc(f,[0.5,0.5])xo =
1.00000000468604 1.00000000468604
fxo = -4.00000000000000
Agnes Baran, Csaba Noszaly Nonlinear equations (cont.) and Optimization in Octave 27 / 31

ExercisePlot the function, its contour-lines and the gradient field on the givendomain. Approximate a local minimizer-maximizer!
f (x1, x2) =x316− x1 +
x1x22
4if (x1, x2) ∈ [−2.6]× [−2.6]
Agnes Baran, Csaba Noszaly Nonlinear equations (cont.) and Optimization in Octave 28 / 31

ExercisePlot the function, its contour-lines and the gradient field on the givendomain. Approximate a local minimizer-maximizer!
f (x1, x2) = sin(x1) cos(x2) if (x1, x2) ∈ [0, π]× [0, π]
Agnes Baran, Csaba Noszaly Nonlinear equations (cont.) and Optimization in Octave 29 / 31

ExercisePlot the Rosenbrock-function, its contour-lines and the gradient field.Approximate a local minimizer-maximizer!https://en.wikipedia.org/wiki/Rosenbrock_function
Agnes Baran, Csaba Noszaly Nonlinear equations (cont.) and Optimization in Octave 30 / 31


![Type X & Ex [px] · Type X & Ex [px] 6000 SERIES 94 Type X & Ex [px] Subject to modifications without notice Pepperl+Fuchs Group USA: +1 330 486 0002](https://img.pdfslide.us/doc/110x75/6084f808e52a7d3a1b72bd58/type-x-ex-px-type-x-ex-px-6000-series-94-type-x-ex-px-subject.jpg)










![N X C Y X N EX u C D ] Y X · PDF filen ex ; *ucl$+ 666666666666666 666666666666666666666666666666666666666666 666666666666666666666666666666666666666666. white engineered for tile](https://img.pdfslide.us/doc/110x75/5a961d947f8b9a9c5b8cd7c1/n-x-c-y-x-n-ex-u-c-d-y-x-ex-ucl-666666666666666-666666666666666666666666666666666666666666.jpg)

![legacycontent.halifax.calegacycontent.halifax.ca/archives/CountyMinutes/... · ]_wsz mcd qr f0 r tvszs rsser t\ us q o]srt\_ ptv zs[qzwr t\ tvs zqt\ \x _]eusz \x f0 ^szr]r fj \trb](https://img.pdfslide.us/doc/110x75/5ecbb9c5b63a0645df7f3f6c/wsz-mcd-qr-f0-r-tvszs-rsser-t-us-q-osrt-ptv-zsqzwr-t-tvs-zqt-x-eusz.jpg)

![papercollection.files.wordpress.com€¦ · · 2008-10-17eXdx,v— fez dx = ex e' sinxdr sin x — [e' cosx+ fez sin xdv]+c ex sin x ex COSx— Jex sinxdx + C 2 sin xdx = ex (sinx](https://img.pdfslide.us/doc/110x75/5b03f2d67f8b9a41528bc0b4/2008-10-17exdxv-fez-dx-ex-e-sinxdr-sin-x-e-cosx-fez-sin-xdvc-ex.jpg)