Embed Size (px)
Citation preview

J. Acoustic Emission, 23 (2005) 81 © 2005 Acoustic Emission Group
HIGH PRECISION GEOPHONE CALIBRATION
MASAHIRO KAMATA
Schlumberger K.K., 2-2-1 Fuchinobe, Sagamihara, Kanagawa 229-0006 Japan
Abstract
Geophones are commonly used in seismic signal detection and are widely sold with response
parameters with specified tolerances. High precision seismic analysis can extract subtle infor-
mation from seismic records, but requires knowledge of the in-situ response parameters of the
sensors. The geophone response is specified at room temperature; however, geophone response
changes with the orientation with respect to gravity, temperature and aging. The changes due to
temperature and tilt may exceed the tolerance limits, so there is a need to perform in-situ calibra-
tion to know the exact response. In the impedance calibration method, the impedance of a geo-
phone can be measured by injecting current. From the impedance, it is possible to describe all of
the response parameters except for the moving mass. The dynamic method is also known for
calibration of a vibration sensor relative to a reference sensor. The reference sensor can be fabri-
cated with a pre-measured moving-coil mass so that all the geophone parameters can be deter-
mined. Alternatively the reference sensor can be calibrated by using a reciprocity method mak-
ing use of three vibration sensors. We have developed unique geophones that output signals
proportional to acceleration. Complete calibration schemes have been established, and all the
geophones are fully calibrated during the manufacturing process. A method has been described
to re-evaluate the geophone’s moving mass to make in-situ calibration in the working environ-
ment with the impedance method.
Keywords: Geophone, Seismic sensors, Moving-coil accelerometer, Calibration, Impedancemethod
1. Introduction
A geophone consists of a pair of moving coils suspended in a magnetic field by means of a
pair of springs as shown in Fig. 1. The spring is usually pre-stressed to compensate the natural
displacement of the coil due to gravitational force so that the coil is centered in the magnetic
field.
The output of a geophone is usually terminated by a shunt resistance R as shown in Fig. 2 to
provide external damping. The current flowing in the moving coil reduces coil motion. The
amount of shunt resistance is chosen so that the total damping factor is 70%.
The equation of motion for the moving coil relative to the magnetic flux for given external
displacement u may be written as;
Blidt
udmk
dt
dc
dt
dm =++
2
2
2
2
(1)
where : coil displacement; k: spring constant; m: moving mass of coil; c: friction coefficient; g:
gravitational acceleration; B: magnetic flux density; l: length of coil wire; i: current; u: external
displacement.

82
Fig. 1 Structure of a geophone.
Fig. 2 Damping control.
is the relative position of the moving coil inside the geophone. The first term in the left
hand side of equation (1) is the inertial force, the second term is the friction force proportional to
the velocity, and the last term is the spring force. The summation of the three forces balances
with the force due to external displacement and the damping force caused by the electric current.
The electric signal generated by the moving coil is expressed in terms of magnetic flux den-
sity, length of coil wire and velocity of the coil as;
dt
dBleg = (2)
For a given external displacement, )sin( tau = , the response may be expressed as;
)sin(= tAeg (3)
The amplitude response and phase may be found from equations (1), (2) and (3) as;
2
0
22
0
2
0
0
21 +
=
S
aA and ( )2
0
0
1
2
tan = (4, 5)
where
m
k=
0,
( )0
2
0
0
2 mRr
S
++= ,
0
0
2m
c= , and BlS =
0.
The geophone parameters are the natural frequency f0, the open circuit sensitivity S0, the open
circuit damping, the coil resistance r, and the moving mass m. The response of a geophone is
determined with four geophone parameters and the shunt resistance R.
For > 0, equation (3) may be approximated as )cos()(0 taSeg = . The sensitivity is
proportional to the velocity (a ) of the vibration at above the natural frequency. Figure 3 shows

83
Fig. 3 Geophone response.
the amplitude response eg/S0(a ) and phase response of a geophone with 10 Hz natural fre-
quency and 0.7 damping.
2. Geophone Response in Measurement Environment
Coil resistance is almost double at 200˚C and open circuit damping is reduced by 20% as
shown in Figs. 4 and 5. Natural frequency f0, and the open circuit sensitivity S0 change by a few
percent each. (Figs. 6 and 7)
The geophone parameters are measured when the geophone is positioned vertically. In prac-
tice, geophones are planted by stamping into the ground by foot, and so are not necessarily verti-
cal. In borehole seismic acquisition, a downhole tool with geophones is deployed in a borehole
that may not be vertical. Figures 8, 9 and 10 show measured results of a geophone under tilt.
There is a few percentage points change observed at ±30˚ tilt.
Fig. 4 Coil resistance change. Fig. 5 Natural frequency change.

84
Fig. 6 Open circuit damping change. Fig. 7 Sensitivity change.
Fig. 8 Natural frequency shift by tilt. Fig. 9 Open circuit damping shift by tilt.
Fig. 10 Open circuit sensitivity shift by tilt.
3. Geophone Accelerometer
We have developed a unique geophone that responds to acceleration between 1/10 x f0 and
10 x f0. A light moving coil is suspended in a strong magnetic flux density.
The imaginary short circuit of an operational amplifier applies a large damping current so
that the geophone responds to acceleration at near its natural frequency. See the schematic dia-
gram in Fig. 11. For = 0, equation (3) may be approximated as
)sin(2)(
0
02t
Saeg = . (6)
Equation (6) shows that a response is in proportion to acceleration. In general, equation (3)
is rewritten as acceleration form (7);

85
Fig. 11 Imagenary short circuit.
Fig. 12 GAC response.
)sin(
21
)(2
0
22
0
00
0
2
+
= t
S
aeg . (7)
When the damping factor is large, the damping term in equation (7) becomes dominant and
the frequency range becomes wider. The natural frequency is chosen to be in the middle of the
seismic band at about 20 Hz. For this natural frequency, the natural displacement of the coil due
to gravity is not large and the GAC design is omni-tiltable. (See Fig. 12.)
The GAC was originally introduced for borehole seismic acquisition to obsolete the need for
a gimbal-mount mechanism. A second generation GAC sensor is now bring used in seabed and
land seismic recording.
4. Geophone Calibration Method
4.1 Impedance Method
A current runs into the moving coil that is suspended in a magnetic flux B. The force acting
to the moving coil is Bli, where B is the magnetic flux density, l is the effective wire length of the
moving coil and i is the current. The equation of motion for the moving coil may be written as;
Blikdt
dc
dt
dm =++
2
2
(8)
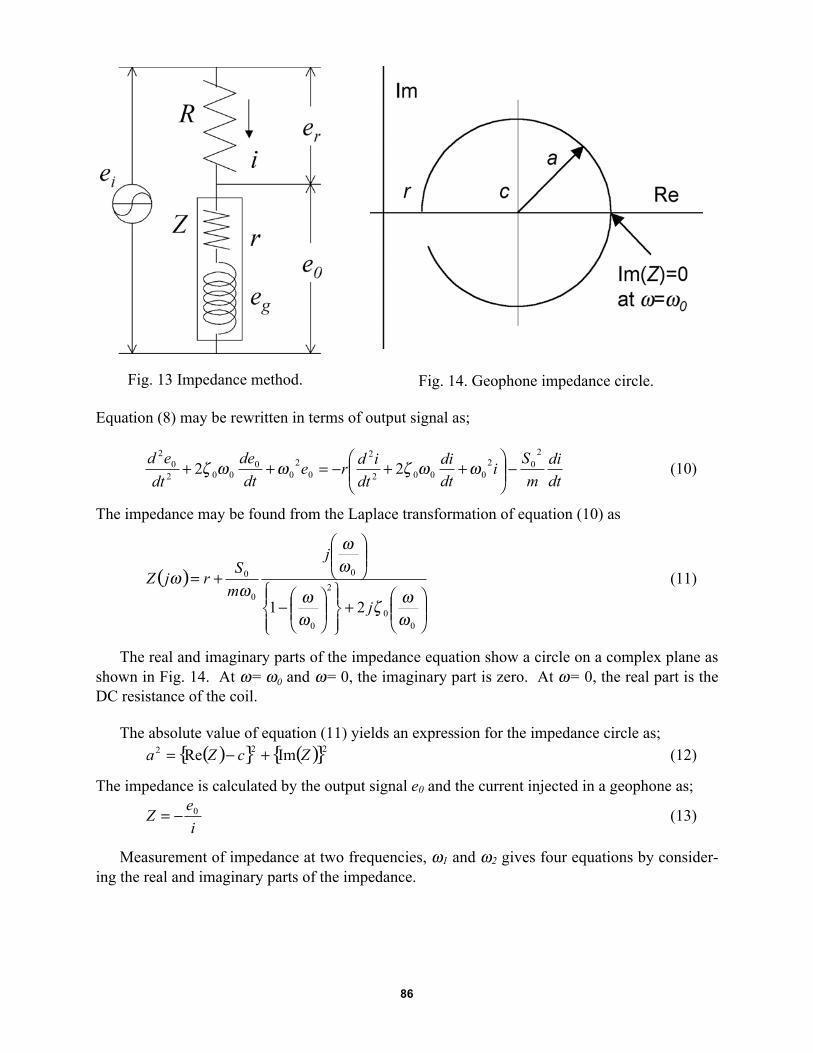
Since the output signal is (see Fig. 13);
rieeg+=
0(9)
86
Fig. 13 Impedance method. Fig. 14. Geophone impedance circle.
Equation (8) may be rewritten in terms of output signal as;
dt
di
m
Si
dt
di
dt
idre
dt
de
dt
ed2
02
0002
2
0
2
0
0
002
0
2
22 ++=++ (10)
The impedance may be found from the Laplace transformation of equation (10) as
( )
+
+=
0
0
2
0
0
0
0
21 j
j
m
SrjZ (11)
The real and imaginary parts of the impedance equation show a circle on a complex plane as
shown in Fig. 14. At = 0 and = 0, the imaginary part is zero. At = 0, the real part is the
DC resistance of the coil.
The absolute value of equation (11) yields an expression for the impedance circle as;
( ){ } ( ){ }222ImRe ZcZa += (12)
The impedance is calculated by the output signal e0 and the current injected in a geophone as;
i
eZ
0= (13)
Measurement of impedance at two frequencies, 1 and 2 gives four equations by consider-
ing the real and imaginary parts of the impedance.

87
( )2
0
1
0
22
0
1
2
0
1
0
0
2
0
1
21
2
Re
+
+=m
S
rZ (14)
( )2
0
1
0
22
0
1
0
1
2
0
1
0
2
0
1
21
1
Im
+
=m
S
Z (15)
( )2
0
2
0
22
0
2
2
0
2
0
0
2
0
2
21
2
Re
+
+=m
S
rZ (16)
( )2
0
2
0
22
0
2
0
2
2
0
2
0
2
0
2
21
1
Im
+
=m
S
Z . (17)
From equations (14-17), it is possible to find the four geophone parameters, r, 0, 0, and S0.
Inserting Z1 and Z2 into Equation (12) gives the center and radius of the impedance circle.
( ) ( ) ( ) ( )
( ) ( ){ }21
2
2
2
1
2
2
2
1
ReRe2
ReReImIm
ZZ
ZZZZc
+= (18)
( ) ( ){ }21
2
1ReIm ZcZa += (19)
The DC resistance r is found to be;
acr = (20)
From impedance equations (14-17), 0, 0, and S0 may be found as,
0=
A1 2
( )1 2
A2 1
( ) where
( )
( )
( )
( )2
1
2
1
Im
Im
Re
Re
Z
Z
rZ
rZA •= (21)
0=
0
2
1
2( ) Re Z1
( ) r{ }2
0 1Im Z
1( ) r{ }
(22)

88
S0=
m Im Z1
( )0
2
1
2( ){ }2
+ 40
2
0
2
1
2
0
2
1
2( ) 1
(23)
4.2 Dynamic Method
In the dynamic calibration method, a geophone is mounted on a shaker with a reference sen-
sor with a known response. The sensitivity may be evaluated as
r
r
g Se
eS 0
= (24)
where
Sg : sensitivity of a geophone to be calibrated
Sr : sensitivity of the reference geophone
e0 : output signal from the geophone to be calibrated
er: output signal from the reference geophone.
Calibrated accelerometers are commonly sold in the market; however, their calibration is
usually to 1% accuracy. It is known that the temperature coefficient of a piezoelectric acceler-
ometer is about 0.1%/˚C; however, the coefficient is not calibrated nor warranted by manufactur-
ers. We do not know if this temperature coefficient can be applied to any calibrated acceler-
ometers we can purchase. A five-degree temperature change can cause 0.5% error, and it is dif-
ficult to measure the temperature of the accelerometer, since the temperature of the housing may
not be the same as the temperature of the piezoelectric element.
Fig. 15 Dynamic method. Fig. 16 Reciprocity calibration.
4.3 Reciprocity Calibration
An alternative to the dynamic method is the reciprocity method of calibration to determine
geophone sensitivities. In the reciprocity method, three geophones are mounted together as
shown in Fig. 16. A current may be injected into a geophone to shake the entire assembly and
the output from the other geophones may be measured. Let eij denote a signal from geophone i
responding to signal input to shaker geophone j. Geophones G2 and G3 output signals are then
e21 and e31 when shaking G1. Then by injecting signal into Geophone G2 we get e32 as the output

89
from G3. A geophone shakes the entire mass M along with three geophones. For the driving
signal te sin0
, the force may be approximated as;
( )t
Z
eSF
j
jsin= (25)
Outputs, e21, e31, and e32 can be expressed in terms of the driving signal. The sensitivity Si of
each geophone may be solved as
( ){ }
( ) ( )iii
i
XZ
Z
e
M
e
eeS
2
2
1
021
1312
1= (26)
( )
( )ii
i
X
Z
e
M
e
eeS
2
013
2312
2= (27)
( )
( )ii
i
X
Z
e
M
e
eeS
2
012
2313
3= (28)
where
Xi( ) =
3
i
2 2( )2
+ 2i i
( )2
(29)
It is then possible to calibrate the sensitivities of three geophones by knowing their impedances.
4.4 Moving Mass Determination and in-situ Calibration
The dynamic method requires a reference geophone for high precision calibration. The
moving coil mass of the reference geophone is measured during assembly. By knowing the
amount of moving mass, the absolute sensitivity can be calibrated by the impedance method.
The reciprocity method can also be used to provide absolute sensitivity calibration. With the ref-
erence geophone, the absolute sensitivity of a geophone may be obtained by the dynamic
method.
In the impedance method, the amount of the moving mass, m was assumed, and the sensitiv-
ity was derived based on the assumed moving mass. If the absolute sensitivity is obtained by the
dynamic or reciprocity method, it is then possible to re-evaluate the moving mass. The absolute
moving mass, m0 may be found by using equations (23) and (24) as2
0
0=
S
Smm
g(30)
The moving mass is a constant that does not change with temperature or tilt of the geophone.
Once the moving mass is known, a geophone can be tested in-situ any time by the impedance
method by injecting current.
5. Conclusion
A high precision geophone calibration method has been established. The method integrates
the impedance and dynamic methods and determines the amount of moving mass. All the Geo-
phone Accelerometers, GACs are fully calibrated during the manufacturing process to determine
DC resistance, natural frequency, open circuit damping, open circuit sensitivity, and moving
mass by impedance and dynamic methods. Since the moving mass does not change with

90
temperature or tilt, it is also possible to make in-situ calibration in the working environment by
just injecting calibration signals. The moving mass does not change in temperature or in tilt. It
is also possible to make in-situ calibration at working environment by just injecting calibration
signals.
References
1) A. Obuchi, M. Kamata: “Moving Coil Accelerometer”, Japanese patent P3098045, H12,
Oct.10
2) A. Obuchi and T. Fujinawa: “Moving Coil Dynamic Accelerometer”, 53rd
EAEG Meeting,
May, 1991 (B021)
3) M. Kamata: “An Accelerometer for Seismic Signal Detection”, Proc. 6th Conference of Un-
derground and Civil Engineering Acoustic Emission, May 1999, Tohoku University, Sendai,
Japan, pp. 25-26.
4) Peter W. Rodgers, Aaron J. Martin, Michelle C. Robertson, Mark M. Hsu, and David B. Har-
ris: "Signal Coil Calibration of E-M seismometers", Bulletin of the Seismological Society of
America, 85, (3), 845-850, June 1995.
5) Mark Harrison, A.O. Sykers, and Paul G. Marcotte: “The Reciprocity Calibration of Piezoe-
lectric Accelerometers”, Journal of Acoustical Society of America, 24, (4), July 1952.
6) Thomas B. Gabrielson: “Apparatus and Method for Calibration of Sensing Transducers”, U.S.patent No. 5,644,067, July 16, 1996.




![legacycontent.halifax.calegacycontent.halifax.ca/archives/CountyMinutes/... · ]_wsz mcd qr f0 r tvszs rsser t\ us q o]srt\_ ptv zs[qzwr t\ tvs zqt\ \x _]eusz \x f0 ^szr]r fj \trb](https://img.pdfslide.us/doc/110x75/5ecbb9c5b63a0645df7f3f6c/wsz-mcd-qr-f0-r-tvszs-rsser-t-us-q-osrt-ptv-zsqzwr-t-tvs-zqt-x-eusz.jpg)
























