Embed Size (px)
Citation preview

Non-Parametric Estimation of
Second Order Stochastic Di¤erential Equations
João Nicolau
Instituto Superior de Economia e Gestão
Universidade Técnica de Lisboa
October, 2006
Abstract
We propose non-parametric estimators of the in�nitesimal coe¢ cients associated with second order sto-chastic di¤erential equations. We show that under appropriate conditions, the proposed estimators areconsistent. Also, we state conditions ensuring the asymptotic normality of these estimators. We concludeour paper with a Monte Carlo experiment in which we assess the response of the nonparametric estimatorswith respect to the step of discretization.

1 Introduction
In economics and �nance many stochastic processes can be seen as integrated stochastic processes
in the sense that the current observation behaves as the cumulation of all past perturbations. In a
discrete-time framework the concept of integration and di¤erentiation of a stochastic process
plays an essential role in modern econometric analysis. For instance, the stochastic process
fyt; t = 0; 1; 2; :::g where yt = � + yt�1 + "t ("t � i:i:d:N (0; 1)) is an example of an integrated
process. Notice that y can be written as yt = y0 + t�+Pt
k=1 "k, or
yt = y0 +
tXk=1
xk; (1)
where xt = � + "t: One way to deal with such processes is to use a di¤erenced-data model (for
example, �yt = �+ "t; in the previous example). Di¤erencing has been used mostly to solve non-
stationary problems viewed as unit roots although, historically, di¤erenced-data models arose early
in econometrics as a procedure to remove common trends between dependent and independent
variables.
Integrated and di¤erentiated di¤usion processes in the same sense as integrated and di¤er-
entiated discrete-time processes are almost absent in applied econometrics analysis. One of the
reasons continuous-time di¤erentiated processes have not been considered in applied econometrics
is, perhaps, related to the di¢ culties in interpreting the �di¤erentiated�process. In fact, if Z is
a di¤usion process driven by a Brownian motion, then all sample functions are of unbounded
variation and nowhere di¤erentiable, i.e. dZt=dt does not exist with probability one (unless some
smoothing e¤ect of the measurement instrument is introduced, such as described in Arnold, 1974).
One way to model integrated and di¤erentiated di¤usion processes and overcome the di¢ culties
associated with the nondi¤erentiability of the Brownian motion is through the representation8>><>>:dYt = Xtdt
dXt = a (Xt) dt+ b (Xt) dWt
(2)
where a and b are the in�nitesimal coe¢ cients (respectively, the drift and the di¤usion coe¢ cient),
1

W is a (standard) Wiener process (or Brownian motion) and X is (by hypothesis) a stationary
process. In this model, Y is a di¤erentiable process, by construction. It represents the integrated
process,
Yt = Y0 +
Z t
0
Xudu (3)
(note the analogy with the corresponding expression in a discrete-time setting, yt = y0+Pt
k=1 xk;
equation (1)) and Xt = dYt=dt is the stationary di¤erentiated process (which can be considered
the equivalent concept to the �rst di¤erences sequence in discrete-time analysis). If X represents
the continuously compounded return or log return of an asset, the �rst equation in system (2)
should be rewritten as d log Yt = Xtdt:
We think that (2) can be a useful model in empirical �nance for at least two reasons. First,
the model accommodates nonstationary integrated stochastic processes (Y ) that can be made
stationary by di¤erencing. Such transformation cannot be undertaken in common univariate
di¤usion processes used in �nance (because all sample paths from univariate di¤usion processes
are nowhere di¤erentiable with probability one). Yet, many processes in economics and �nance
(e.g. stock prices and nominal exchange rates) behave as the cumulation of all past perturbations
(basically in the same sense as unit root processes in discrete framework). Second, in the context of
stock prices or exchange rates, the model suggests directly modelling the (instantaneous) returns,
in contrast to usual continuous-time models in �nance, which directly model the prices. General
properties for returns (stylized facts) are well known and documented (for example, returns are
generally stationary in mean, the distribution is not normal, the autocorrelations are weak and
the correlations between the magnitude of returns are positive and statistically signi�cant, etc.).
One advantage of directly modelling the returns (X) is that these general properties are easier to
specify in a model like (2) than in a di¤usion univariate process for the prices. In fact, several
interesting models can be obtained by selecting a (x) and b2 (x) appropriately. For example, the
choice a (x) = � (� � x) and b (x) =q�2 + � (Xt � �)2 leads to an integrated process Y whose
returns, X; have an asymmetric leptokurtic stationary distribution (see the example below). This
2
speci�cation can be appropriated in �nancial time series data. Bibby and Sørensen (1997) had
already noticed that a similar process to (2) could be a good model for stock prices.
We observe that the model de�ned in equation (2) can be written as a second order stochastic
di¤erential equation, d (dYt=dt) = a (Xt) dt+ b (Xt) dWt: Integrated di¤usions like Y in equation
(3) arise naturally when only observations of a running integral of the process are available.
For instance, this can occur when a realization of the process is observed after passage through
an electronic �lter. Another example is provided by ice-core data on oxygen isotopes used to
investigate paleo-temperatures (see Ditlevsen and Sørensen, 2004).
To illustrate continuous-time integrated processes, �gure 1 presents two simulated independent
paths of Yt = Y0 +R t0Xudu where X is governed by the stochastic di¤erential equation
dXt = 20 (0:01�Xt) dt+q0:1 + 10 (Xt � 0:05)2dWt
(X is also represented in �gure 1). All paths are composed of 1000 observations de�ned in the
interval t 2 [0; 10] : In section 4 we give more details on how we generate these observations. It is
interesting to observe that Y displays all the features of an integrated process (with a positive drift,
since E [Xt] = 0:01): absence of mean reversion, shocks are persistent, mean and variance depend
on time, etc. On the other hand, the unconditional distribution of X (return) is asymmetric and
leptokurtic.
** FIGURE 1 HERE**
Estimation of second order stochastic di¤erential equations raises new challenges for two main
reasons. On the one hand, only the integrated process Y is observable at instants fti; i = 1; 2; :::g
and thus X in model (2) is a latent non-observable process. In fact, for a �xed sampling interval,
it is impossible to obtain the value of X at time ti from the observation Yti which represents the
3

integral Y0+R ti0Xudu. On the other hand, the estimation of model (2) cannot in principle be based
on the observations fYti ; i = 1; 2; :::g since the conditional distribution of Y is generally unknown,
even if that of X is known. An exception is the case where X follows an Orstein-Uhlenbeck
process, which is analyzed in Gloter (2001).
However, with discrete-time observations fYi�; i = 1; 2; :::g (to simplify we use the notation
ti = i�; where � = ti � ti�1), and given that
Yi� � Y(i�1)� =Z i�
0
Xudu�Z (i�1)�
0
Xudu =
Z i�
(i�1)�Xudu;
we can obtain a measure of X at instant ti = i� using the formula:
~Xi� =Yi� � Y(i�1)�
�: (4)
Naturally, the accuracy of (4) as a proxy for Xi� depends on the magnitude of �: Regardless
of the magnitude of � we have in our sample, we should base our estimation procedures on the
samplen~Xi�
o:=n~Xi�; i = 0; 1; 2; :::
osince X is not observable.
Parametric and semi-parametric estimation of integrated di¤usions is analyzed in Gloter (1999,
2006) and Ditlevsen and Sørensen (2004).
We suppose that both in�nitesimal coe¢ cients a and b; de�ned in model (2), are unknown and
our aim is their non-parametric functional estimation. We propose non-parametric estimators for
the in�nitesimal coe¢ cients a and b: Our analysis reveals that the standard estimators based on
the samplen~Xi�
oare inconsistent, even if we allow the step of discretization � to go to zero
asymptotically. Introducing slight modi�cations to these estimators we provide consistent estima-
tors. For a review on non-parametric estimation of (�rst order) stochastic di¤erential equations
see, for example, Rao (1983), Florens-Zmirou (1993), Jiang and Knight (1997), Bandi and Phillips
(2003), Nicolau (2003) and Gobet et al. (2004). For a review on parametric and semi-parametric
estimation see, for example, Aït-Sahalia (2002) and Kessler (1997) and the references therein.
The rest of the paper is organized as follows. In section 2 we formulate the main hypotheses
concerning the X process and we identify our estimators. In section 3 we establish the main
4

results. We show that under appropriate conditions, the proposed estimators are consistent and
asymptotically normal. In section 4 we perform a Monte Carlo experiment in which we assess the
response of the nonparametric estimator with respect to the step of discretization �: Section 5
concludes.
2 Estimators and Assumptions
The aim of this paper is to study the following estimators,
pn (x) =1
nhn
nXi=1
K
x� ~X(i�1)�n
hn
!; an (x) =
An (x)
pn (x); b2n (x) =
Bn (x)
pn (x)(5)
for, respectively, p (x) ; a (x) and b2 (x) ; based on the observationsn~Xi�n
o; where
An (x) =1
nhn
nXi=1
K
x� ~X(i�1)�n
hn
! � ~X(i+1)�n� ~Xi�n
��n
; (6)
Bn (x) =1
nhn
nXi=1
K
x� ~X(i�1)�n
hn
! 32
�~Xi�n � ~X(i�1)�n
�2�n
: (7)
Consider the process (Y;X) governed by the system (2). Let I = (l; r) the state space of X: Let
s (z) = expn�R zz02a (u) =b2 (u) du
obe the scale density function (z0 is an arbitrary point inside
I) and m (u) =�b2 (u) s (u)
��1the speed density function. Let S (l; x] = limx1!l
R xx1s (u) du and
S [x; r) = limx2!r
R x2xs (u) du where, l < x1 < x < x2 < r. We now present a set of eight
assumptions that are used throughout the paper.
A1 S (l; x] = S [x; r) =1 for x 2 I.
A2R rlm (x) dx <1.
A1 and A2 conditions assure that X is ergodic and the invariant distribution P 0 has density
p (x) = m (x) =R rlm (u) du with respect to the Lebesgue measure (Skorokhod, 1989, theorem 16).
The expression p (x) is usually referred to as the stationary density.
A3 X0 = x has distribution P 0.
5

Assumption A3 together with A1-A2 implies that X is stationary (Arnold, 1974). The hypoth-
esis that X is a stationary process is obviously a plausible assumption since for major integrated
time series data a simple di¤erentiation generally assures stationarity.
A4 limx!r sup�a(x)b(x) �
b0(x)2
�< 0, limx!l sup
�a(x)b(x) �
b0(x)2
�> 0:
These conditions are discussed in Chen et al. (1998) and are similar to ones proposed by
Hansen and Scheinkman (1995). Under the A4 assumption the process is � - mixing and � -
mixing (see Chen et al., 1998). Technically, for a Markov process, the notion of � - mixing
requires the conditional expectations operator for any interval of time to be a strong contraction
on the linear space L02 =�f :Rf (x) p (x) dx = 0;
Rf2 (x) p (x) dx <1
. As a consequence, the
jth autocovariance of f (Xt) tends to zero at exponential rate as j ! 1, for all f 2 L02 (see
Hansen and Scheinkman, 1995, proposition 8 and Florens-Zmirou, 1989).
We notice that the discretized di¤usion fXi�g := fXi�; i = 0; 1; 2; :::g with �xed � is an
ergodic process since X = fXt; t � 0g is ergodic under the assumptions A1-A4 (see Dacunha-
Castelle and Florens-Zmirou, 1986). The processn~Xi�
oinherits some properties from fXi�g.
As Ditlevsen and Sørensen (2004) point out, since X is stationary, the distribution of Xt is the
same for all intervalsf[(i� 1)�; i�) ; i � 1g, and thusn~Xi�
ois a stationary process. Also if
E [X] <1, we have by Chebyshev integral inequality and stationarity
Eh~X2i�
i= E
2640@R i�(i�1)�Xudu
�
1A2375 � E
24� R i�(i�1)�X2udu
�2
35 = R i�(i�1)�E �X2u
�du
�= E
�X20
�:
On the other hand,n~Xi�
ois �-mixing (�-mixing) since measurable functions of mixing processes
are mixing and of the same size.
The kernel function K satis�es the following assumption:
A5 K (:) is positive, symmetric, continuously di¤erentiable andRRK (u) du = 1,
RR uK (u) du =
0,RRK
2 (u) du = K2 <1.
6

A6(�) limh!0 E�1h
��K 0 ��n;i����� <1 where � = 2 or � = 4 and �n;i = �x�X(i�1)�n
h +(1� �) x� ~Xi�n
h ,
0 � � � 1:
A6(�) is generally satis�ed under very weak conditions. For instance, with a Gaussian kernel
and a Cauchy stationary density (which has heavy tails) we still have limh!0 Eh1h
��K 0 �Xh
���4i <1.Notice that the expectation with respect to the distribution of �n;i depends on the stationary
densities of X and ~X; since �n;i is a convex linear combination of X and ~X.
A7 (i) The in�nitesimal coe¢ cients a and b have continuous derivatives of order 4 and satisfy
ja (x)j � C (1 + jxj)� and jb (x)j � C (1 + jxj)� for some � > 0. (ii) E [Xr0 ] < 1 where
r = max f4�; 1 + 3�;�1 + 5�;�2 + 6�g :
This assumption is related to the application of lemma 4 (Appendix A). See the general dis-
cussion in remark 1.
A8 (i) �n ! 0; hn ! 0; nhn ! 1;p�n=hn ! 0 as n ! 1; (iia) n�n
hn(�n log (1=�n))
1=2 !
0; hnn�n ! 1; (iib) h5nn�n ! 0 as n ! 1; (iiia) n�n
hn(�n log (1=�n))
1=2 ! 0; (iiib)
h5nn! 0 as n!1:
Assumptions A1-A5 and A8 assure consistency and asymptotic normality of the standard
estimators for p (x) ; a (x) ; b2 (x) ; based on the observations fXi�ng, respectively,
p0n (x) =1
nhn
nXi=1
K
�x�X(i�1)�n
hn
�; a0n (x) =
A0n (x)
p0n (x);
�b2n
�0(x) =
B0n (x)
p0n (x)(8)
where
A0n (x) =1
nhn
nXi=1
K
�x�X(i�1)�n
hn
� �Xi�n �X(i�1)�n
��n
;
B0n (x) =1
nhn
nXi=1
K
�x�X(i�1)�n
hn
� �Xi�n �X(i�1)�n
�2�n
:
7

In fact, it can be proved (see for example, Bandi and Phillips, 2003) that
p0n (x)p�! p (x) (convergence in probability);
a0n (x)p�! a (x) ;
phnn�n
�a0n (x)� a (x)
� d�! N
�0;K2
b2 (x)
p (x)
��b2n
�0(x)
p�! b2 (x) ;pnhn
��b2n
�0(x)� b2 (x)
�d�! N
�0;4K2b
4 (x)
p (x)
�:
3 Main Results
We assume the A1-A7 conditions in all theorems.
Theorem 1 Assume A6(� = 2) and A8 (i). Then
pn (x) =1
nhn
nXi=1
K
x� ~X(i�1)�n
hn
!p�! p (x) :
All proofs are presented in appendix B.
It is well-known that the standard p0n estimator (i.e. built from the observations fXi�g) does
not require that the step of discretization � goes to zero as n ! 1 (if � is �xed it is necessary
that n� ! 1 ). However, as one would expect, the convergence of the density estimator based
on the observationsn~Xi�
orequires �n ! 0:
Theorem 2 (a)Assume A6(� = 2), A8 (i) and (iia). Then
an (x) =
1nhn
Pni=1K
�x� ~X(i�1)�n
hn
�( ~X(i+1)�n� ~Xi�n)
�n
1nhn
Pni=1K
�x� ~X(i�1)�n
hn
� p�! a (x) :
(b) If additionally A8 (iib) and hnn�3n ! 0 then
phnn�n (an (x)� a (x))
d�! N
�0;K2
b2 (x)
p (x)
�:
Standard conditions for consistency of a0n (x) still assure an (x)p�! a (x). It is implicit in the
conditions of the theorem that n�n ! 1 and this condition should also hold in the standard
case.
8

The �natural�estimator for a (x) ; based on the observationsn~Xi�n
o; is
�an (x) =
0@ 1
nhn
nXi=1
K
x� ~X(i�1)�n
hn
! � ~Xi�n� ~X(i�1)�n
��n
1A =pn (x) : (9)
It can be proved, however, that this estimator is inconsistent. When � is �xed the advantages
of the an over the �an are not clear. In order to shed light on this issue, we perform some Monte
Carlo experiments in section 4. One of the main conclusions is that the �an estimator may present
a smaller mean squared error than the an estimator when the step of discretization is not small
enough. On the contrary, when �n ! 0 the mean squared error of the an estimator converges to
the mean squared error of the drift estimator based on the observations fXi�g.
Theorem 3 Assume A6 (� = 4), A8 (i) and (iiia). Then
b2n (x) =
1nhn
Pni=1K
�x� ~X(i�1)�n
hn
� 32 ( ~Xi�n� ~X(i�1)�n)
2
�n
1nhn
Pni=1K
�x� ~X(i�1)�n
hn
� p�! b2 (x) :
(b) If additionally A8 (iiib) and hnn�2n ! 0 then
pnhn
�b2n (x)� b2 (x)
�d�! N
�0;4K2b
4 (x)
p (x)
�:
The most important di¤erence between this theorem and the standard counterpart result is that
our estimator b2n involves a multiplicative factor of 3=2. Gloter (2006), using di¤erent arguments
and working in a semi-parametric framework, has already foreseen the need for this correction.
For more details see the proof of theorem 3. Therefore, the �natural�estimator for b2 (x) ; based
on the observationsn~Xi�n
o,
b2n;� (x) =
Pni=1K
�x� ~X(i�1)�n
hn
�( ~Xi�n� ~X(i�1)�n)
2
�nPni=1K
�x� ~X(i�1)�n
hn
� (10)
has an asymptotic bias of �b2 (x) =3 (when �n ! 0). This bias is con�rmed through Monte Carlo
simulations (section 4).
9

4 Monte Carlo Simulation
In this section we perform a Monte Carlo experiment aimed at assessing the response of the non-
parametric estimators with respect to the step of discretization �. Our Monte Carlo experiment is
based on the simulation of Yt = Y0+R t0Xudu for t 2 [0; T ] = [0; 1000] whereX is an ergodic process
governed by the stochastic di¤erential equation dXt = �10Xtdt+p0:1 + 0:1X2
t dWt: To simulate
Y and X we consider a time discretization 0 < � < 2� < � � � < n� = T of the interval [0; T ] and the
Euler-Maruyama approximation. We found that the value � = 0:001 is reliable in the sense that
the approximations X and Y are su¢ ciently close to the respective sample path of the Itô process.
As such, we simplify the notation and we write X = X and Y = Y . We generate 5000 replicas
of X and Y: We have thus in each replica a sequence of n = 1; 000; 000 values of X and Y (note
that T=� = 1000=0:001 = 1; 000; 000) from which we estimate the in�nitesimal coe¢ cients assum-
ing di¤erent values for the step of discretization. Speci�cally, we consider the following samples:
fYi�0:01; i = 0; 1; :::; 100000g ; fYi�0:02; i = 0; 1; :::; 50000g ; :::; fYi�0:2; i = 0; 1; :::; 5000g ; i.e. step
of discretization ranges from � = 0:01 to � = 0:2 with a step of 0:01. In each sample (and for
each replica) we estimate the in�nitesimal coe¢ cients a (x) = �10x and b2 (x) = 0:1+ 0:1x2: The
values of x are from the set A = fq0:20; q0:30; ::; q0:70;q0:80g where q� is the quantile of order � of
the stationary distribution of X; i.e. p (x) = 1:80656�1 + x2
��11:
A measure of error is based on the Monte Carlo average of the "integrated" squared error
(ISE), obtained in each replica. We denote this statistic as AISE. For example, the AISE of an;
based on a certain value for �; is given by
AISE (an;�) =SXj=1
ISE (an;�; j)
S; S = 5000;
where ISE (an;�; j) is the "integrated" squared error over the set A of the estimator an; obtained
in jth replica, i.e.
ISE (an;�; j) =
Px2A (an (x)� a (x))
2
#A; a (x) = �10x:
10
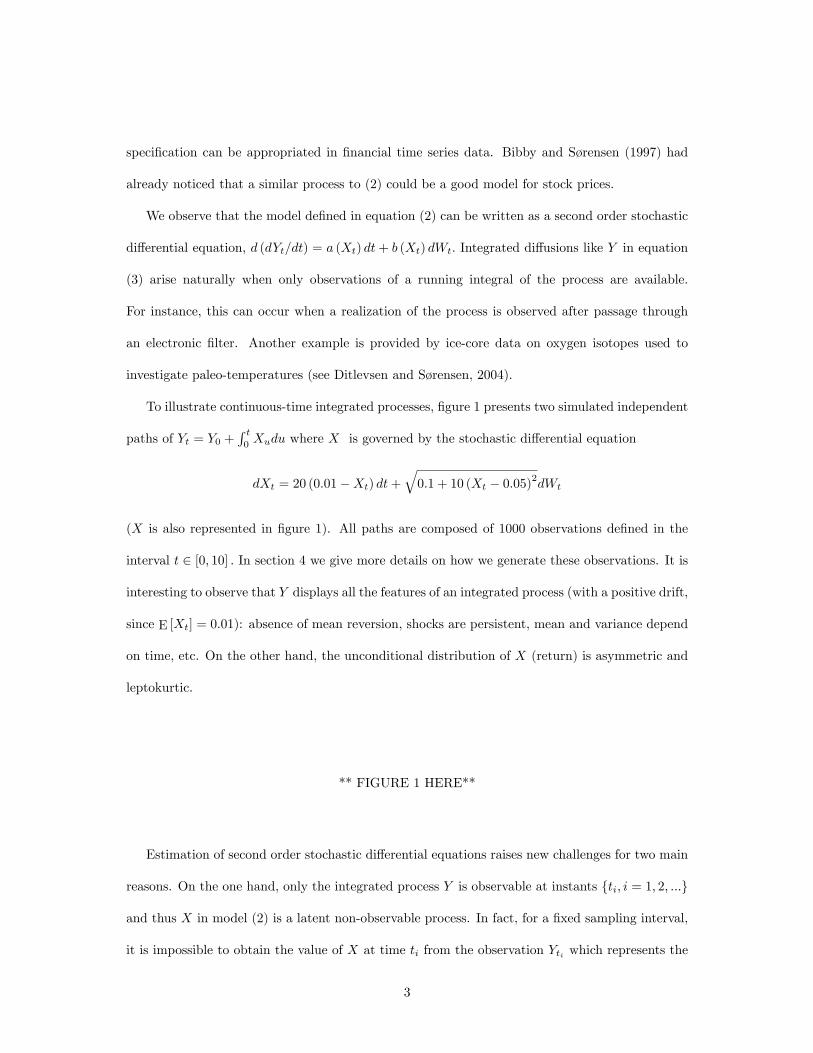
(#A : number of elements of the set A; in our case, #A = 7). Although the ISE (an;�; j) is
only a rough approximation to the standard ISE measure,RR (an (u)� a (u))
2du; it can provide
valuable information on the error of approximation of the nonparametric estimator.
We study the drift estimators an and �an (see (5) and (9), respectively) and the di¤usion
estimators b2n and b2n;� (see (5) and (10), respectively). For comparison purposes we also analyze
the drift and the di¤usion estimators based on the observations fXi�g, a0n and�b2n
�0(see (8)).
In all cases we considered a Gaussian kernel and the common bandwidth hn = �h�Xn�1=5, with
�h = 1:06. The results are shown in �gure 2. The main conclusions are the following. First,
as expected, the estimators based on the observations fXi�g ; a0n and�b2n
�0, generally present
smaller AISE when the step of discretization is moderate or high. These di¤erences are, however,
negligible when � is small. Second, as expected, the AISE of the estimators an and b2n (dashed
line) converge to zero as � ! 0: Third, the �an estimator (dotted line) seems inconsistent since
the AISE does not converge to zero as � shrinks. However, for moderate/high values of �;
the �an estimator performs reasonably well, and better than the an estimator. Consequently, in
practical applications the an estimator should be used with some caution, especially when the
step of discretization is not small. In these cases, the �an estimator may be better. Fourth, the
b2n;� (x) estimator, as predicted in section 3, has the worst performance when compared with the
other estimators. Finally, the AISE associated with the di¤usion estimators are much smaller for
all values of � > 0: This may be related to the data generator process selected and/or to the
fact that the estimation of a is harder than that of b: This is a point emphasized, for example, by
Gobet et al. (2004) and Bandi and Phillips (2003).
** FIGURE 2 HERE **
11

5 Conclusions and Other Extensions
In this article we showed that standard non-parametric estimators of the in�nitesimal coe¢ cients
of second order stochastic di¤erential equations, based on the observationsn~Xi�
o, are not appro-
priate, since they are inconsistent, even when �n ! 0: However, as shown, slight modi�cations to
the standard estimators allow us to de�ne consistent estimators.
There are some extensions that can be considered such as non-equidistant observations, optimal
bandwidth choice, data-driven estimation, minimax rates. More general assumptions on the data
generator process as in Bandi and Phillips (2003) can also be applied.
12
References
Aït-Sahalia, Y. (2002) Maximum Likelihood Estimation of Discretely Sampled Di¤usions: A
Closed-Form Approximation Approach. Econometrica 70(1), 223-262.
Arnold, L. (1974) Stochastic Di¤erential Equations: Theory And Application. John Wiley &
Sons.
Bandi, F. & P. Phillips (2003) Fully Nonparametric Estimation of Scalar Di¤usion Models.
Econometrica 71, 241-283.
Bibby, B. & M. Sørensen (1997) A Hyperbolic Di¤usion Model for Stock Prices. Finance and
Stochastics 1, 25-41.
Chen, X. & L. Hansen & M. Carrasco (1998) Nonlinearity and Temporal Dependence. Unpub-
lished.
Dacunha-Castelle, D. & Florens-Zmirou (1986) Estimation of the Coe¢ cient of a Di¤usion From
Discretely Sample Observations. Stochastic 19, 263-284.
Ditlevsen S. & M. Sørensen (2004) Inference for Observations of Integrated Di¤usion Processes.
Scandinavian Journal of Statistics 31(3), 417-429.
Florens-Zmirou, D. (1989) Approximate Discrete-Time Schemes for Statistics of Di¤usion Processes.
Statistics 4, 547-557.
Florens-Zmirou, D. (1993) On Estimating the Di¤usion Coe¢ cient from Discrete Observation.
Journal of Applied Probability 30, 790-804.
Gobet, E. & M. Ho¤mann & M. Reiß(2004) Nonparametric Estimation of Scalar Di¤usions
based on Low Frequency Data, Annals of Statistics 32(5), 2223�2253.
Gloter A. (2001) Parameter Estimation for a Discrete Sampling of an Integrated Ornstein-
Uhlenbeck Process. Statistics 35, 225-243.
13
Gloter A. (2006) Parameter Estimation for a Discretely Observed Integrated Di¤usion Process.
Scandinavian Journal of Statistics 33.
Hansen, L. & J. Scheinkman (1995) Back to the Future: Generating Moment Implications for
Continuous-Time Markov Processes. Econometrica 63, 767-804.
Jiang, G. & J. Knight (1997) A Nonparametric Approach to the Estimation of Di¤usion Processes,
with an Application to a Short-Term Interest Rate Model. Econometric Theory 13, 615-645.
Kessler M. (1997), Estimation of an Ergodic Di¤usion from Discrete Observations. Scandinavian
Journal of Statistics 24(2), 211- 229.
Nicolau J. (2003) Bias Reduction in Nonparametric Di¤usion Coe¢ cient Estimation. Econometric
Theory 19(5), 754-777.
Rao, B. (1983) Nonparametrical Functional Estimation. New York, Academic Press.
Skorokhod, A. (1989) Asymptotic Methods in the Theory of Stochastic Di¤erential Equation.
Translation of Mathematical Monographs 78, American Mathematical Society.
14

Appendix A: Auxiliary Results
In the following lemma we generalize a formula of Florens-Zmirou (1989) to multivariate dif-
fusions. Lemma 4 is essential in the proofs of all the theorems presented in this work.
Lemma 4 Let Z be a d-dimensional di¤usion process governed by the stochastic integral equation
Zt = Z0 +
Z t
0
a (Zs) ds+
Z t
0
b (Zt) dWs
where a (z) = [ai (z)]d�1 is a d � 1 vector, [bij (z)]d�d is a d � d diagonal matrix and Wt is a
d� 1 vector of independent Brownian motions. One assumes that a and b have continuous partial
derivatives of order 2s. Let f (z) denote a continuous function de�ned on Rd with values in Rd
and with continuous partial derivatives of order 2s+ 2. Then
E�f (Zi�)jZ(i�1)�
�=
sXk=0
Lkf�Z(i�1)�
� �kk!+R
where L is a second order di¤erential operator de�ned as
L =dXi=1
ai (z)@
@zi+1
2
dXj=1
dXi=1
bij (z)@2
@zi@zj(@f
@ziand
@2f
@zi@zjare d� 1 vectors)
=dXi=1
ai (z)@
@zi+1
2
�b21 (z)
@2
@z21+ b22 (z)
@2
@z22+ :::+ b2d (z)
@2
@z2d
�and R is a stochastic function of order �s+1 (see remark 1 in appendix B for details on the R
function).
A particularly important case is d = 2 with
dYt = Xtdt
dXt = a (Xt) dt+ b (Xt) dWt:
In this case, the second order di¤erential operator is L = x @@y + a (x)
@@x +
12b2 (x) @2
@x2 : Lemma
4 allows us to calculate a variety of mathematical expectations involving the ~X process. For
example, using lemma 4 one can conclude that Eh��1
�~X(i+1)� � ~Xi�
�i= E [a (X0)] + O (�)
and E���1
�~X(i+1)� � ~Xi�
�2�= 2=3E
�b2 (X0)
�+O (�) :
15

Lemma 5 Consider
"1;n =1
nhn
nXi=1
K
x� ~X(i�1)�n
h
!g�~X(i�1)�n
; ~Xi�n
�;
"2;n =1
nhn
nXi=1
K
�x�X(i�1)�n
h
�g�~X(i�1)�n
; ~Xi�n
�:
Assumep�n=hn ! 0; A1-A3 and A5. (a) If A6(� = 4) and E
��g�~X(i�1)�n
; ~Xi�n
��2�<
1 or (b) if A6(� = 2) and h�1n E
����� ~X(i�1)�n�X(i�1)�n
��g�~X(i�1)�n
; ~Xi�n
�����2� < 1 then
j"1;n � "2;njp�! 0:
This result simpli�es the proofs of theorems 1, 2 and 3. With this lemma, we can obtain the
limit in probability of "1;n by calculating the limit in probability of "2;n (which is easier to obtain).
Appendix B: Proofs
Proof of lemma 4 By Itô�s formula we have
f (Zi�) = f�Z(i�1)�
�+
Z i�
(i�1)�Lf (Zu1) du1 +
Z i�
(i�1)�
dXi=1
bi (z)@f (Zu1)
@zidWu1 :
Applying Itô�s formula several times to Lf (Zu1) we can conclude, given the properties of the
Wiener process, that
E�f (Zi�)jZ(i�1)�
�=
sXk=0
Lkf�Z(i�1)�
� �kk!+R (11)
where R =R i�(i�1)�
R u1(i�1)�
R u2(i�1)� :::
R us(i�1)�E
�Ls+1f
�Zus+1
���Z(i�1)�� dus+1dus:::du1:�Remark 1 Consider the jth row of the vector R:
Rj =
Z i�
(i�1)�
Z u1
(i�1)�
Z u2
(i�1)�:::
Z us
(i�1)�E�Ls+1fj
�Zus+1
���Z(i�1)�� dus+1dus:::du1Given stationarity, it is obvious that E
�Ls+1fj (Z0)
�<1 implies E [Rj ] <1. Assumption
A7 guarantees that the expression E�Ls+1fj (Z0)
�is �nite, in all applications of lemma 4
in this paper. For example, in proof of lemma 5 we consider
E
����� ~X(i�1)�n�X(i�1)�n
����4� = �2n E�b4 (X0)
�3
+ E [R] :
16

and E [R] is of order �3n: Using assumption A7, simple but tedious calculations enable us to
�nd that L3�~X0 �X0
�4is bounded by polynomial degree of order r = max f4�; 1 + 3�;�1 + 5�;�2 + 6�g ;
where � is such that ja (x)j � C (1 + jxj)� and jb (x)j � C (1 + jxj)� : Thus, E [Xr0 ] <1 guar-
antees that the expansion (11) is well de�ned. In this article all expressions involving the
application of lemma 4 (in these cases s is equal or lower that 2) are bounded by a poly-
nomial degree of order r. Therefore, assumption A7 assures that lemma 4 is used properly
throughout the paper.
Proof of lemma 5 By Taylor�s formula
K
x� ~X(i�1)�n
hn
!= K
�x�X(i�1)�n
hn
�+K 0 ��n;i�
�~X(i�1)�n
�X(i�1)�n
�hn
where �n;i = �x�X(i�1)�n
hn+ (1� �) x� ~Xi�n
hn, 0 � � � 1; stationarity and Holder�s inequality, we
have
E [j"1;n � "2;nj] = E
"����� 1nhnnXi=1
K
x� ~X(i�1)�
h
!�K
�x�X(i�1)�
h
�!g�~X(i�1)�; ~Xi�
������#
� E
"����� 1hn K
x� ~X(i�1)�
h
!�K
�x�X(i�1)�
h
�!g�~X(i�1)�; ~Xi�
������#
= E
24������ 1hnK 0 ��n;i��~X(i�1)�n
�X(i�1)�n
�hn
g�~X(i�1)�; ~Xi�
�������35 :
��1
hnE���K 0 ��n;i�����1=���
1
hnE
����� ~X(i�1)�n�X(i�1)�n
������1=�!��Eh���g � ~X(i�1)�; ~Xi����� i1= �
where 1=�+ 1=� + 1= = 1: Selecting � = 4; � = 4 and = 2 we have by hypothesis
�1
hnEh��K 0 ��n;i���4i1=4� <1;
E
����g � ~X(i�1)�; ~Xi�����2�1=2!<1
and by lemma 4
1
hnE
����� ~X(i�1)�n�X(i�1)�n
����4�1=4 = 1
hn
�2n E
�b4 (X0)
�3
+O��3n�!1=4
! 0:
17

Thus E [j"1;n � "2;nj]! 0: Part (b) is immediate from Chauchy-Schwarz inequality (in this case it
is su¢ cient to consider limh!0 Eh1h
��K 0 ��n;i���2i <1).�Proof of theorem 1 Let
p0n (x) =1
nhn
nXi=1
K
�x�X(i�1)�n
hn
�:
It is well known that under the conditions of the theorem one has
E���p0n (x)� p (x)���! 0
(see, for example, Bandi and Phillips, 2003). It remains to show that E���pn (x)� p0n (x)��� ! 0.
This follows immediately from lemma 5 (b) with g � 1: Therefore, the right-hand side of the
inequality
E [jpn (x)� p (x)j] � E���pn (x)� p0n (x)���+ E ���p0n (x)� p (x)���
goes to zero (under the conditions of the theorem). Thus, we have E [jpn (x)� p (x)j]! 0 and, by
Chebyshev�s inequality, pn (x)p�! p (x) :�
Proof of theorem 2 (a) From the proof of theorem 1 we know that pn (x)p�! p (x) : Thus,
to prove an (x) = An (x) =pn (x)p�! a (x) it is su¢ cient to verify that An (x)
p�! a (x) p (x) : Let
us consider
A0n (x) =1
nhn
nXi=1
K
�x�X(i�1)�n
hn
� �Xi�n
�X(i�1)�n
��n
:
Under the conditions of the theorem it is known that A0n (x)p�! a (x) p (x) (see Bandi and Phillips,
2003). The idea is to prove that An (x)�A0n (x)p�! 0 which implies that An (x)
p�! a (x) p (x) and
consequently an (x)p�! a (x) : By lemma 5 (b) An (x)� A0n (x) has the same limit in probability
as
�1;n =1
nhn
nXi=1
K
�x�X(i�1)�n
hn
� � ~X(i+1)�n� ~Xi�n
��n
� 1
nhn
nXi=1
K
�x�X(i�1)�n
hn
� �Xi�n �X(i�1)�n
��n
=1
nhn
nXi=1
K
�x�X(i�1)�n
hn
�0@�~X(i+1)�n
� ~Xi�n
��n
��Xi�n
�X(i�1)�n
��n
1A :18

We now show that �1;n (x)p�! 0: By lemma 4, A7 and stationarity, we have
E [�1;n (x)]
= E
24 1hnK
�x�X(i�1)�n
hn
�0@�~X(i+1)�n
� ~Xi�n
��n
��Xi�n
�X(i�1)�n
��n
1A35= E
24 1hnK
�x�X(i�1)�n
hn
�E
24E240@
�~X(i+1)�n
� ~Xi�n
��n
��Xi�n �X(i�1)�n
��n
1A������Fi�n
35������F(i�1)�n
3535=
�n2E
�1
hnK
�x�X(i�1)�n
hn
��a�X(i�1)�n
�a0�X(i�1)�n
�+1
2b2�X(i�1)�n
�a00�X(i�1)�n
���=
�n2
Z1
hnK
�x� uhn
��a (u) a0 (u) +
1
2b2 (u) a00 (u)
�p (u) du
= O (�n) :
On the other hand,
V ar [�1;n (x)]
=1
n�nhnV ar
26666641pn
nXi=1
1phnK
�x�X(i�1)�n
hn
�p�n
0@�~X(i+1)�n
� ~Xi�n
��n
��Xi�n
�X(i�1)�n
��n
1A| {z }
gi
3777775=
1
n�nhnV ar
"1pn
nXi=1
gi
#:
We have V arh1pn
Pni=1 gi
i= 1
n
Pni=1 E
h1hK
2�x�X(i�1)�n
hn
�f2i+ n where n represents the
sum of 2nPn�1
j=1
Pni=j+1 terms involving the autocovariances. Under stationarity and assumption
A4 (X and ~X are � - mixing and � - mixing), the jth autocovariance of gi tends to zero at
exponential rate as j !1, for all functions g such that E�g2i�<1: Therefore, if E
�g2i�<1; the
series 1 is absolutely convergent and one has V arh1pn
Pni=1 gi
i< 1: Since
RK2 (u) du < 1
and X has stationary density, one can conclude that
E�g2i�= E
264 1hnK2
�x�X(i�1)�n
hn
��n
0@�~X(i+1)�n
� ~Xi�n
��n
��Xi�n �X(i�1)�n
��n
1A2375
is �nite since, by lemma 4,
E
264�n0@�~X(i+1)�n
� ~Xi�n
��n
��Xi�n
�X(i�1)�n
��n
1A2375 = 2
3E�b2 (X0)
�+O (�n) :
19

In conclusion, V ar [�1;n (x)] = 1n�nhn
V arh1pn
Pni=1 gi
i! 0 as n�nhn !1:
(b) By hypothesis (see Bandi and Phillips, 2003)
Z0n (x) =phnn�n
�a0n (x)� a (x)
� d�! N
�0;K2
b2 (x)
p (x)
�(12)
where a0n (x) = A0n (x) =pn (x). By the asymptotic equivalence theorem, it su¢ ces to prove that
Zn (x)� Z0n (x)p�! 0 where Zn (x) =
phnn�n (an (x)� a (x)) : From part (a) we know that
Zn (x)� Z0n (x) =phnn�n
��1;n (x)
pn (x)
�
and �1;n (x) =pn (x) = Op (�n) : Thus, under the assumption hnn�3n ! 0; the results holds.�
Proof of theorem 3 (a) From the proof of theorem 1 we know that pn (x)p�! p (x) : Thus, to
prove b2n (x) = Bn (x) =pn (x)p�! b2 (x) it is su¢ cient to verify that Bn (x)
p�! b2 (x) p (x) : Let
us consider
B0n (x) =1
nhn
nXi=1
K
�x�X(i�1)�n
hn
� �Xi�n
�X(i�1)�n
�2�n
:
Under the conditions of the theorem it is known that B0n (x)p�! b2 (x) p (x) (see Bandi and
Phillips, 2003). The idea is to prove that Bn (x) � B0n (x)p�! 0 which implies that Bn (x)
p�!
b2 (x) p (x) and consequently b2n (x)p�! b2 (x) : By lemma 5 (a) Bn (x)�B0n (x) has the same limit
in probability as
�2;n (x) =1
nhn
nXi=1
K
�x�X(i�1)�n
hn
� 32
�~Xi�n
� ~X(i�1)�n
�2�n
� 1
nhn
nXi=1
K
�x�X(i�1)�n
hn
� �Xi�n
�X(i�1)�n
�2�n
=1
nhn
nXi=1
K
�x�X(i�1)�n
hn
�0B@ 32
�~Xi�n
� ~X(i�1)�n
�2�n
��Xi�n �X(i�1)�n
�2�n
1CA :We now prove that �2;n (x)
p�! 0. Let us consider
�3;n (x) =1
nhn
nXi=1
K
�x�X(i�1)�n
hn
�fi
20

where fi =�
32 ( ~Xi�n� ~X(i�1)�n)
2
�n� (Xi�n�X(i�1)�n)
2
�n
�: Since, by lemma 4
E
264E264 32
�~Xi�n
� ~X(i�1)�n
�2�n
�������Fi�n
375�������F(i�1)�n
375 = b2�X(i�1)�n
�+O (�n) :
E
" �Xi�n
�X(i�1)�n
�2�n
�����Fi�n
#= b2
�X(i�1)�n
�+O (�n) :
one has
E [fi] = E
2640B@ 3
2
�~Xi�n � ~X(i�1)�n
�2�n
��Xi�n
�X(i�1)�n
�2�n
1CA375 = O (�n) :
On the other hand,
V ar [�2;n (x)]
=1
nhnV ar
266666641pn
nXi=1
1phnK
�x�X(i�1)�n
hn
�0B@ 32
�~Xi�n
� ~X(i�1)�n
�2�n
��Xi�n
�X(i�1)�n
�2�n
1CA| {z }
gi
37777775=
1
nhnV ar
"1pn
nXi=1
gi
#:
Using the same arguments as in the proof of theorem 2 (a), it is easy to conclude that the condition
E
26640B@ 3
2
�~Xi�n � ~X(i�1)�n
�2�n
��Xi�n
�X(i�1)�n
�2�n
1CA23775 = O (1)
assures V ar [�2;n (x)]! 0:
(b) By hypothesis (see Bandi and Phillips, 2003)
Z0n (x) =pnhn
��b2n
�0(x)� b2 (x)
�d�! N
�0;4K2b
4 (x)
p (x)
�where
�b2n
�0(x) = B0n (x) =pn (x). By the asymptotic equivalence theorem it is su¢ cient to prove
that Zn (x)� Z0n (x)p�! 0 where Zn (x) =
pnhn
�b2n (x)� b2 (x)
�: From part (a) we know that
Zn (x)� Z0n (x) =pnhn
�2;n (x)
pn (x):
and �3;n (x) = Op (�n) : Thus, under the assumption hnn�2n ! 0 the results holds.�
21
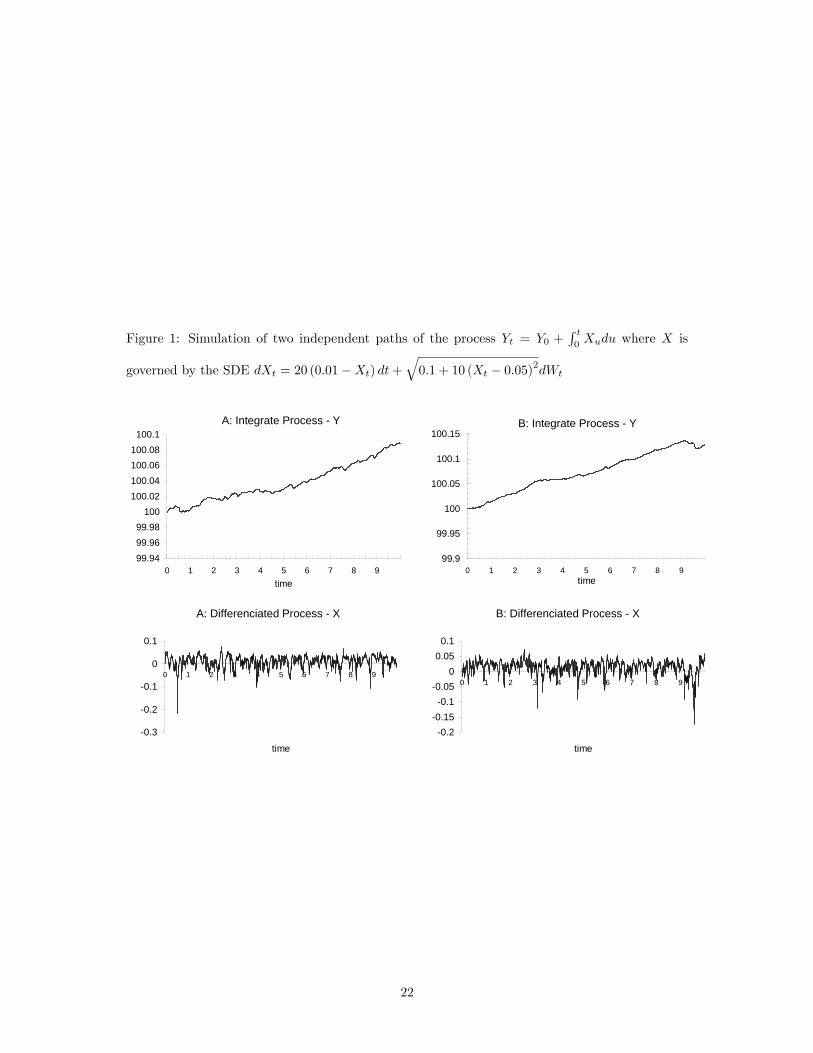
Figure 1: Simulation of two independent paths of the process Yt = Y0 +R t0Xudu where X is
governed by the SDE dXt = 20 (0:01�Xt) dt+q0:1 + 10 (Xt � 0:05)2dWt
A: Integrate Process Y
99.9499.9699.98
100100.02100.04100.06100.08100.1
0 1 2 3 4 5 6 7 8 9time
A: Differenciated Process X
0.3
0.2
0.1
0
0.1
0 1 2 3 4 5 6 7 8 9
time
B: Integrate Process Y
99.9
99.95
100
100.05
100.1
100.15
0 1 2 3 4 5 6 7 8 9time
B: Differenciated Process X
0.20.15
0.10.05
00.05
0.1
0 1 2 3 4 5 6 7 8 9
time
22
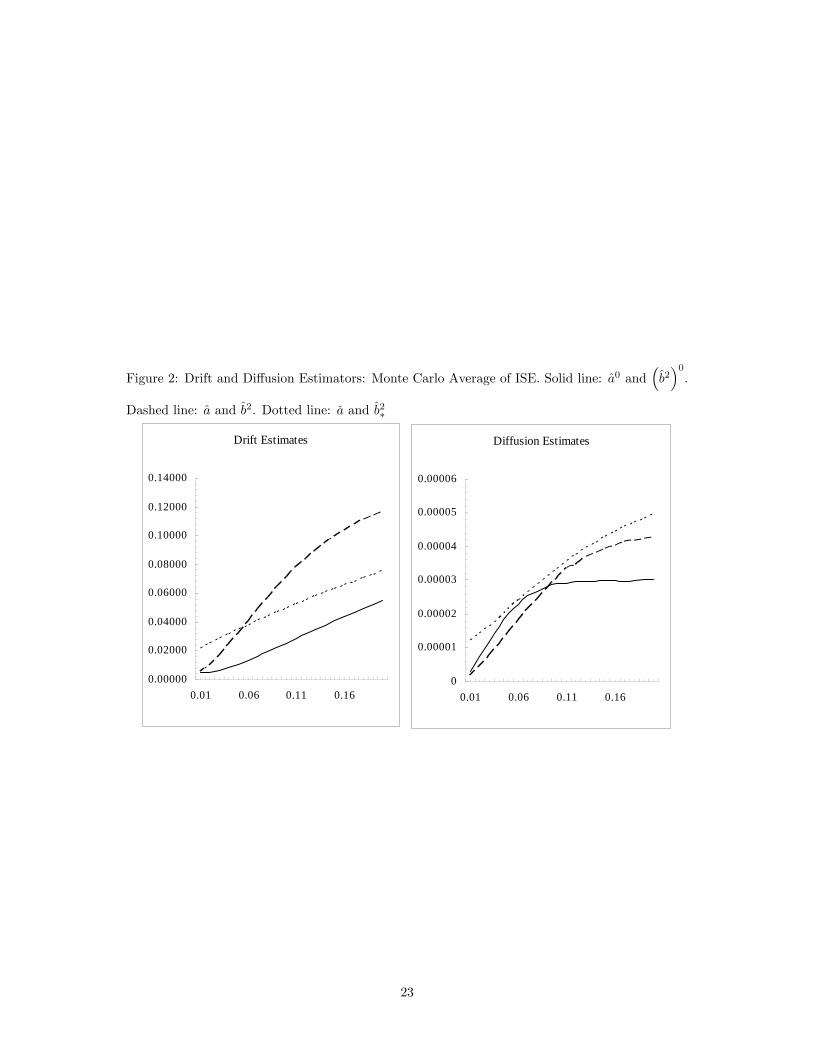
Figure 2: Drift and Di¤usion Estimators: Monte Carlo Average of ISE. Solid line: a0 and�b2�0.
Dashed line: a and b2. Dotted line: �a and b2�
Drift Estimates
0.00000
0.02000
0.04000
0.06000
0.08000
0.10000
0.12000
0.14000
0.01 0.06 0.11 0.16
Diffusion Estimates
0
0.00001
0.00002
0.00003
0.00004
0.00005
0.00006
0.01 0.06 0.11 0.16
23