Embed Size (px)
Citation preview

New neural circuits for robot phonotaxisRichard Reeve & Barbara Webb
Centre for Cognitive and Computational NeuroscienceDepartment of Psychology
University of StirlingStirling FK9 4LA
Scotland [email protected], [email protected]
AbstractW. Grey Walter built robotic systems in order tobetter understand biological systems. In that tradition,this paper reports ongoing work on a robot model ofcricket sound localisation. The main advances are theinclusion of a much larger range of neuroethologicaldetail , and the investigation of multimodal influenceson the behaviour. The former allows exploration ofthe functionality of identified neurons in the insect,including the possible roles of multiple sensoryfibres, mutually inhibitory connections, and brainneurons with pattern-filtering properties. The latterfocuses on the inclusion of an optomotor stabili sationresponse, and how this might improve trackingparticularly under conditions of random disturbance.
1. Introduction
"But if the performance of a model is to be demonstrably afair imitation of cerebral activity, the conditions ofstimulation and behaviour must be equally comparable withthose of the brain" (Walter, 1961)W. Grey Walter is rightly credited as a forerunner in manyareas of the study of brain and behaviour. In the field ofbiologically-inspired robots, it is important to remember thathis ingenious devices were seriously intended as workingmodels for understanding biology, a "mirror for the brain"that could both generally enrich our understanding ofprinciples of behaviour (such as the complex outcome ofcombining simple tropisms) and be used to test specifichypotheses (such as Hebbian learning). The researchdescribed here follows directly in this tradition, with thefocus on building robot systems as a means of exploringbiological questions.We, like Walter, are interested in the complexity ofbehaviour that can result from the interaction of a smallnumber of neural elements. However, Walter chose toexplore this in the context of rather abstract, genericcharacterisations of animal behaviour such as 'exploring','approaching' and 'avoiding'; whereas we have chosen tofocus on modelli ng the specific neural circuit underlying aparticular animal behaviour, the sound localisation abilit y ofthe cricket. We consider the modelli ng of this 'simple' insect
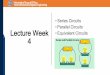
behaviour to be the focal point for investigating a range ofinteresting, interconnected general issues for biology. Asill ustrated in figure 1, these include: the functionalsignificance of 'low-level' neural properties; the importanceof physical embodiment as a solution and constraint onbehaviour; the possible connections between biologicalsolutions and conventional engineering approaches tosensorimotor control and integration; and how we can scaleup from single behaviours to explain the flexible interactionof multiple adaptive systems within an organism.
Figure 1: Cricket phonotaxis is the central focus for exploring arange of general themes in behavioural neuroscience
Female crickets can locate conspecific males by movingtowards the species-specific calli ng song the males produceby opening and closing their wings. Typical male songsconsist of groups of short sound bursts (e.g. for Gryllusbimaculatus, four 20ms bursts of 4.7kHz sound) producedseveral times a second. Females appear to be particularlyselective for the repetition rate of bursts ('syllables') withineach group (a 'chirp'). The neuroethology of this system hasbeen extensively studied (reviewed in Pollack, 1998) and wehave built a series of robot models that have led tointeresting reinterpretations of this data. In Webb (1995) &Lund, Webb & Hallam (1997; 1998; Lund et al., 1998) itwas shown that the recognition and localisation aspects ofthe task could be closely interlinked, allowing a surprisinglysimple controller to produce the same kind of selectiveapproach behaviour in a robot as was observed in the

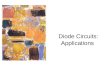
cricket. In Webb & Scutt (2000) the robot hardware wasinterfaced with a spiking neural network simulation, and itwas shown that the algorithmic controller exploredpreviously could be captured in a four neuron circuit (figure2) that exploited spike timing and dynamic synapticproperties to be selective for the temporal pattern of signalsin a manner resembling the female cricket.
Auditory Neurons
MNR
Microphones
Motors
Left turn Right turn
MNL Motor neurons
ANL ANR
Left ear Right ear
Excitatory Synapse
Inhibitory Synapse
Figure 2: The four neuron circuit used in previous work (Webb &Scutt, 2000). The auditory neurons (AN) represent the first stage ofprocessing in the cricket's prothoracic ganglion in which a smallnumber of neural pairs receive direct input from the auditorynerve. The motor neurons (MN) produce an output signal to turnleft or right depending on which AN neuron fires first. The AN-MN synapses exhibit depression, so the response is best for asignal with appropriate temporal patterning.
Effective biological modelli ng requires repeated cycles ofimplementation, testing and refinement. The previous robot'sneural circuit could reproduce much of the cricketbehaviour, but this is not suff icient to conclude that thecricket's neural circuit is the same. There may be alternative'wirings' that work as well or better, or are more consistentwith the anatomical and physiological data. For example, theinhibitory cross-connections from prothoracic auditoryneurons (AN) to opposite motor neurons (MN) in the modelare not particularly plausible, and may not be necessary tocreate a winner-take-all response to the stronger auditorysignal. Instead the AN or MN could be mutually inhibitory.There is neurophysiological evidence of mutual inhibition atthe prothoracic AN level, mediated by so-called 'omeganeurons' (ON). The previous model did not include theadaptation that occurs in the auditory nerve and prothoracicneurons. It appears this property may serve to enhance theonsets of the syllables, which could help explain theapparent insensitivity of the female to variation in syllablelength (Hedwig, pers. comm.). In addition, the cricket isunlikely to have such a direct connection between theauditory input and motor output. There is information about
intermediate stages of processing in brain neurons fromSchildberger (1984) that can be more directly addressed.Finally, the basic neural model used in the earlier work wasitself somewhat abitrary; so a representation of spikingdynamics that links more closely to current theoreticalneuroscience would improve the biological plausibilit y ofthe circuits implemented on the robot. In section 2.2 wedescribe such a model, and in section 3.1 discuss the resultsof including the specific neural connections mentionedabove.An important motivation for using a robot model rather thana simulation is to test the behaviour of a given neural circuitin the context of real environmental interaction (Webb,2001). An issue that then needs to be addressed is whetherthe movements of the robot replicate the speed and size ofmovements of the cricket; and how this relates to possiblemotor neuron circuitry. A first point to note is that cricketsbehave somewhat differently when performing this task inthe dark vs. in the light. In the light, forward velocities arehigher and the animal makes fewer/shorter stops (Weber etal., 1981). This effect is probably both motivational (beingin the light represents a predation risk) and a result of havingvisual cues available to aid navigation, as will be discussedbelow. In arena tests in the light, walking velocities are inthe order of 5-20cm per second, with stops typicallyoccuring every few seconds, although some animals may notstop at all . In the dark, stopping becomes more regular.Turns in response to sound occur both after stopping andduring walking, on average every two seconds. A turn madewhen at an angle of more than 30 degrees from the soundsource will almost always be in the correct direction; butturns also occur, in a random direction, when the angularerror is less than 10 degrees, or with increasing reliabilit y tosounds between the midpoint and 30 degrees (Rheinleander& Blätgen, 1982). It has been suggested the size of turn isfairly consistent (around 30-40 degrees) (Oldfield, 1980). Insection 3.2 we present a motor circuit that produces similarbehaviour when implemented on the robot.We are working towards the implementation of a robotsystem able to do phonotaxis outdoors. As a step in thisdirection we are investigating the issue of how differentsensory modaliti es involved in navigating through realenvironments should be integrated. It is generally agreedthat the biological solution to the issue of integratingbehaviours is unlikely to take the 'classic' form of sensorfusion into a general world model over which a problemsolving process produces an output. On the other hand, thereare many alternative architectures that seem plausible:subsumption-type architectures that hierarchically suppressdifferent reflexes; action selection schemes, eithercentralised or distributed; combining basis functions; orusing some form of forward model to distinguish afferentand re-afferent signals. We are exploring how simple neuralinteractions at the motor circuit level might be used toreproduce some of the observed behavioural effects ofinteracting modaliti es in the cricket, in particular, the effects

of light level on the dynamics of approach behaviour(discussed above), and the use of an optomotor reflex tostabili se tracks, especially under circumstances of randomdisturbance.Crickets show the classic optomotor response of rotatingwhen stimulated by global rotation of their visual field.Böhm et al (1991) tested crickets in an open-loop treadmillexperiment with competing sound and visual signals. Theyconcluded that the animal simply added the separate turningtendencies. However, in Webb & Harrison (2000) we foundthat such a scheme faces problems in the real, closed loopsituation. Optomotor signals will be produced duringintended turns towards sound, and cause an unwanted'correction'. A simple inhibitory interaction, i.e. suppressingthe optomotor response when responding to sound, wasshown to be one way to solve this problem, but a number ofalternative solutions can be suggested, such as the wellknown concept of 'efferent copy' signals to cancel outexpected feedback. In the final section of this paper wecompare three different neurally implemented schemes forcombining the behaviours.
2. Implementation
The robot base used in the following experiments is theKoala; a six-wheeled base measuring approximately40x30x20cm with two drive motors. This choice of platformis due to the need to mount multiple sensory systems andfuture aims to do phonotaxis out of doors, neither of whichis practical on the small robot (Khepera ) previously used.Although the actuation bears littl e direct resemblance to thecricket it is possible to use this robot to replicate appropriatespeeds and turning rates. Another current project, not furtherdiscussed here, is to implement phonotaxis on one of thecockroach-inspired walking robots being developed byQuinn & Ritzmann (1998).
2.1. Sensory systems
The main sensory systems on our robot are dedicatedhardware designs for processing sound and visual signals,based closely on biology. The auditory system mimics thepressure difference receiver properties of the cricket ear(Michelsen et al., 1994) to produce a highly directionalsignal for a specific frequency range. Details are in Lund etal 1997. The visual system is an analog VLSIimplementation of the Hassenstein-Reichardt model ofelementary motion detection, developed by Harrison &Koch (1998). The directional response is summed across anarray of detectors providing a signal for full -field motion,which resembles the response of certain tangential cells inthe lobular plate of the fly brain, associated with theoptomotor response. Cells with similar responses to visualrotation have been found in the cricket.
We are making use of the onboard Koala sensors to derivetwo further signals that resemble (with less accuracy)information available to the cricket. The ambient light levelis being measured, which serves as an indicator of theamount of 'cover' in the animal's current position - dark issafety. The infrared reflection detectors are being used asantennae, that is, to provide a signal giving approximatedistance to obstacles in a particular direction, which isindicated by mechanical sensing of the bend point in insectantennae (Camhi, 1999). We have also constructed andinterfaced a number of additional sensors, to detect tilt , bodycontact, wind direction, and compass heading. However, inthis paper we only use the auditory, ambient light andoptomotor sensors.
2.2. Neural model
The behaviour of the basic neural model is related to singlecompartment 'leaky integrate and fire' models, but basedmore closely on the models described by Koch (1999). Theneuron is considered to be an RC circuit with a fixedmembrane capacitance and membrane conductance and abase potential across the membrane to which it will decayexponentially in the absence of external input. It can havemultiple synapses (excitatory, inhibitory and shunting)which attach to the neuron and affect the membranepotential when their presynaptic neurons spike. If themembrane potential rises above a threshold, the neuron will'fire', sending a spike to any output synapses; then thepotential will be reset to some lower value and the neuronwill enter a refractory period.The synapses are modelled as a variable conductance with abattery potential which corresponds to the reversal potentialof the ion channel opened by the synaptic neurotransmitter.These conductance based synapses are more realistic thanthe standard 'charge-dump' models used in most artificialneural networks, with more expressive power as they allow areversal potential, a delay (corresponding to the sum ofpossible axonal, neurotransmitter, and dendritic delays), avariable time course for the exponential decay ofconductance, as well as a more standard 'weight' determiningthe standard conductance change in the affected ion channel.They also allow short-term adaptation of the weight throughmechanisms of facilit ation and depression.Despite this level of complexity the neural model remainsanalytic under a very broad range of conditions, and thesynaptic model in isolation is always closed form. Thisallows us to specify constraints and calculate appropriateparameters directly from the equations, which simpli fies theparameter search task when compared to most sophisticatedmodels.For cases where such a neural model is too complex (forinstance for sensory neurons attached to the tympanum), weuse a simpler model of a poisson distributed spike trainproportional to the synaptic input (in this case the amplitudeof vibrations in our artificial tympanum) with optional

depression. Again the closed form solutions to this modelallow us to calculate directly the required depressionparameters to match the data we have for parallel sensoryfibre spike rates.
2.3. Experimental methods
The neural simulation system described above is embeddedas part of a C++ program for running robot experiments(Reeve, unpublished). This system deals with the serialtransfer of sensory data and motor data to and from therobot, and is designed for easy transfer between differentrobot bases and the addition of arbitrary new sensor inputsor motor outputs. It can also be run without the robot, usingpreviously recorded or artificially generated data files asinput, which is particularly useful when tuning circuitparameters. It automatically incorporates data from anoverhead camera tracking system (or alternative trackingmechanisms) into the data record produced from running therobot.The results described below were produced in two ways:analytical and simulation results; and results from runningthe robot. The latter experiments occurred in the normal labenvironment, within a 2x1.6 meter space determined by theoverhead camera's field of view. The sound was a computer-generated song. The 'standard' song consists of 20ms bursts('syllables') of 4.7kHz sound, with 20ms gaps between them,grouped into a four-burst 'chirp' followed by 340ms silence.This is the characteristic calli ng song of male Gryllusbimaculatus. In some experiments the pattern was varied toproduce different 'syllable repetition intervals': the length ofthe chirp was held constant at 250ms, and the length ofsyllables within the chirp varied from 5ms to 45ms, withintersyllable gaps of the same length as the the syllable.
3. Results
3.1. The phonotaxis circuit
The previous neural model tested on the robot focussed onone pair of identified ascending interneurons ("AN1") in thecricket's prothoracic ganglion that appear to be critical forphonotaxis. They respond best to sound at the calli ng songcarrier frequency, encode the pattern of the response, andhyperpolarising one leads to a change in walking direction.In the current model we incorporate more of the neural datafrom the cricket, motivated by functional hypotheses aboutthe various neural elements, aiming to reproduce specificpatterns of response. The new model is ill ustrated in figure3.
AN1 AN1
ON1 ON1
BNC2 BNC2
BNC1BNC1
Left
auditory
nerve nerve
auditory
Right
Figure 3: the new neural circuit for phonotaxis, based on cricketneuroanatomy, as described in text. 'AN', 'ON' and 'BN' refer tospecific 'ascending', mutually connected 'omega', and 'brain'neurons that have been identified in the cricket nervous system.
First, we have represented the parallel sensory fibres thatprovide input from the tympanum (on the cricket's legs) tothe prothoracic ganglion. In the cricket there are around 50-60 sensory neurons, with perhaps half of these tuned to thecalli ng song frequency. There is some evidence of rangefractionation for different sound amplitudes. Recording fromthe leg nerve shows fairly fast time constants and thus clearcopying of time varying patterns, with some adaptationwithin the first few milli seconds of response to a soundburst, levelli ng off to a steady rate. We are currently usingeight such sensory inputs per ear, and have found this hasthe advantage of increasing reliabilit y by reducing the totalvariabilit y of the input, and also enables the coding ofamplitude differences over a larger range. The plots in figure4 show the group response of the simulated auditory nerve,which has been tuned to resemble the cricket data.
Figure 4: The summed spiking response of multiple units in thesimulated auditory nerve to the normal cricket song pattern atdifferent amplitudes. Note the peak at syllable onsets caused byrecovery from adaptation during the gap between syllables.

Second, we have included a second pair of neurons thatreceive input from the auditory nerve, based on the omeganeurons (ON) described in the cricket. These are mutuallyinhibitory and also inhibit the opposite ascendinginterneurons. The most obvious function of theseconnections is to increase the difference in activationbetween the two sides, to emphasise the directionality of theresponse. Elegant experiments from Horseman and Huber(Horseman & Huber, 1994) have shown that inhibition fromthe opposite side makes a difference of several spikes perchirp to the AN1 response. Figure 5 ill ustrates thereplication of this effect in our model (compare to theirfigure 3), as the firing rate to an ipsilateral sound level isdecreased proportionally to the contralateral sound level.However the increase in difference is not large, and whatmay be a more important role has not (to our knowledge)been previously considered. This is that the circuit may actas a means of gain control, so that for varying amplitudes ofsound (experienced as the cricket or robot approaches thesound source) the response adapts to encode the relevantdifference between the ears within a similar range of firingrates, without saturation. Another, possibly significant,effect of the inhibitory cross-connection is that, due to thedelay introduced by the additional synapse, the onset of thesyllable is less affected than the remainder of the syllable.This serves to enhance the onset encoding and effectively'cleans up' the signal so that the encoding of the soundpattern becomes clearer in the ascending neuron firingpattern for real sound stimuli .
Figure 5: effect of inhibitory cross connections on the firing rate ofAN1. The ipsilateral firing rate decreases as the contralateral soundlevel increases.
Third, we have included a stage of neural processing in the'brain' before signals are sent to the motor output. The mostcomprehensive study of the role of cricket brain neurons inphonotaxis is provided by Schildberger (1984), whosuggests a possible filtering circuit for syllable raterecognition by the female. He identifies two main classes ofauditory responsive cells: BNC1 which appears to get direct
input from AN1; and BNC2 which get input via BNC1.These neurons vary in their response to the pattern of sound.BNC1d appears to require a minimum syllable duration nearto the typical calli ng song before it reaches threshold, whichmakes it makes a 'low pass' filter for the syllable rate,assuming a constant duty cycle. BNC2b appears to spikearound once per syllable, which makes it ''highpass" i.e. asthe syllable rate decreases the firing rate will also decrease.BNC2a shows a bandpass filtering effect, responding atsomewhat less than a spike per syllable for normal rates butproducing fewer spikes for slow rates or fast rates.Schildberger argues that the response of BNC2a reflects an"AND"ing of the output of BNC2b and BNC1d, to producea neural 'recognition' signal for the appropriate soundpattern. We initially attempted to copy these responsepatterns in our simulated neurons, but there were severaldiff iculties. In particular, it seemed impossible to tuneneuron or synapse parameters to produce a neural responsethat could distiguish very long syllables from very rapidsyllables as they both produce the same response - more orless continuous firing - in the AN1 neurons. After somesystematic searching of the parameter space we found that a'low-pass' filter could be be produced by having amoderately depressing synaptic connection from AN toBN1. This would fire several spikes at the onset of syllables.If the syllable rate was fast, the depression would notrecover and fewer spikes would occur. The 'ideal' syllablerate was the upper limit for which clear enough gapsoccurred for the synapse to recover. At slower rates, therecovery would be greater and the chance of spiking atsyllable onsets increased; however as the time betweenonsets increases the number of spikes per chirp starts todecrease. A second depressing synaptic connection fromBN1 to BN2, with a relatively slow time constant, performstemporal summation of the BN1 output so that these slowerresponses were not usually suff icient to produce an spike,making BN2 a bandpass filter for the correct syllable rate.In figure 6 we show the response of our 'BN1' and 'BN2'neurons to song patterns identical to those used bySchildberger, i.e. using equal length 'chirps' with syllablerepetition intervals (SRI) ranging from 10ms to 90ms. It canbe seen that BN1 has a moderately bandpass response whichis sharpened by BN2; the response of BN2 is very similar tothe BN2a neuron reported by Schildberger. In the top plotswhich show results with simulated sound inputs, theapparent best 'tuning' is to an SRI of 26ms. However, usingthe same neural parameters with real sound input, as shownin the lower plots, syllables at this rate are not so clearlycoded, and the best response in BN2 moves to an SRI ofbetween 42ms and 58ms.The need for a clear pattern makes the BN2 neurons muchmore likely to respond to clearer firing patterns in AN,which generally correspond to the louder side, particularlyafter the cross-inhibitory effects of ON. We found it was notnecessary to include any explicit mechanism for comparingthe firing rates or latencies at the BN level. We could simply

take a spike in the left or right BN2 as indicating the need toturn in that direction to approach the sound.
10 26 42 58 74 900
2
4
6
8
10
12
14Simulated BN1 response
spik
es p
er c
hirp
syllable repetition interval
vol=25%vol=50%vol=75%vol=100%
10 26 42 58 74 900
5
10
15
20
25
syllable repetition interval
spik
es p
er c
hirp
Simulated BN2 response
vol=25%vol=50%vol=75%vol=100%
10 26 42 58 74 900
1
2
3
4
5
6BN1 response
spik
es p
er c
hirp
syllable repetition interval10 26 42 58 74 90
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
syllable repetition interval
spik
es p
er c
hirp
BN2 response
Figure 6: Spike rates of simulated brain neurons to songs withdifferent syllable repetition intervals. Upper plots, simulatd inputs;lower plots, real sound inputs. Left, the BN1 neuron shows a low-pass/band-pass response; right, the BN2 neuron shows a band-passresponse.
3.2. Motor circuit
Our aim in designing the motor circuit was to reproduce thespecific kinds of moves, turns and stops observed in cricketsperforming phonotaxis, with as few neural connections aspossible. There is unfortunately littl e direct data on theneural connectivity from the brain to the motor controlcircuits for sound localisation in the cricket. Staudacher &Schildberger (1998** ) describe some 200 descendingneurons, some of which show a response to sound, with theirresponse often 'gated' by whether or not the animal iswalking. One of these neurons has a firing rate thatcorrelates with the walking direction of the animal. Currentmodels of motor control for six-legged walking in otherinsects (e.g. (Cruse et al., 1998)) suggest several features toinclude in our circuit. Motor patterns tend to be self-sustaining through local feedback or CPG activity, so thatonly a trigger signal is required to start the movement.Steering appears to be modulated by fairly simple 'turn'signals from the brain interacting with this pattern generatorso as to appropriately modify limb movements. The neuralcircuitry we have used is adapted from the scheme devisedby Chapman (2001) in his robot model of cricket escapebehaviour. It is ill ustrated in figure 7. The paired burstgenerators (BG) will , when initiated by an incoming spike,mutually activate each other to produce a continuous burstof spikes that go to right and left forward neurons (RF &LF) and drive the robot forward. The length of the burst islimited by the eventual activation of the STOP neuron whichinhibits the BG neurons. One trigger for movement is theambient light level. The other is a spike in the left or rightBNC2. These act via a right or left turn neuron (RT & LT)
to additionally modulate the forward velocity by appropriateexcitatory and inhibitory connections to RF & LF.
Figure 7: Neural circuit for motor control: see text. BNC2 is theoutput from the auditory circuit in figure 2, RT and LT signal leftand right turns, the BG pair form a burst generator that excitesright forward (RF) and left forward (LF) neurons when triggeredby RT, LT or GO till deactivated by STOP.
Figure 8 shows the performance of the robot using thecombined phonotaxis and motor circuits to track cricketsong. A total of 30 trials were run, from 3 different startingpositions relative to the speaker. It can be seen that the robotis capable of successfully locating the sound source,producing a 'cricket-like' path that oscill ates around thesound direction.
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1−2
−1.8
−1.6
−1.4
−1.2
−1
−0.8
−0.6
−0.4
−0.2
0Tracks to the sound source
metres
met
res
Figure 8: Tracks of the robot to a cricket song from three startingpositions (thirty tracks in total). The sound source is at (0,0).

3.3. Integrating different modaliti es
The same motor circuitry needs to subserve othersensorimotor behaviours that are to be integrated on therobot, including the default behaviour when sound is notpresent (taken for now to be random search for safe darkplaces), and the optomotor response of turning so as tostabili se visual slip. For example the average speed of therobot should increase with the ambient light as the GOneuron in the motor circuit receives more stimulation. Theinstaneous forward speed of the robot under five differentlight levels, with or without sound, is shown in Figure 9.Sound causes no movement unless there is a light level of atleast 10, and that level of light is too low to stimulatemovement without sound. The pattern of movement inresponse to sound is changed by the light level - in brighterlight the robot makes fewer stops.
Figure 9: Forward speed of the robot's motors under different lightlevels: left without sound; right with sound.
In figure 10 we show how the optomotor sensor has beenintegrated into the motor control. The sensor is used toproduce four spike trains, two for each direction of motion.These are summed in two optomotor interneurons, whicheffectively smooths the signal. The interneurons mutuallyinhibit one another. The output from the interneurons steersthe robot in the appropriate direction by excitatory inputs tothe left or right 'forward' neurons. For example, if someonewalks in front of the robot it tends to follow this movement,and if it veers off course in anyway (e.g. through wheel slip)it will compensate, and maintain a straight heading. Notethat unless the robot is already moving (due to light or soundinputs) the optomotor input is not enough to move the roboton its own, i.e. it only modulates movement. In figure 11 weshow how the optomotor response can correct for randomlyimposed turns (as might be produced by environmentaldisturbance such as uneven ground surface, or for a flyinginsect, wind gusts) to produce almost straight paths.
Figure 10: The neural circuit for the optomotor response. Left orright visual movement excites opto-clockwise (0C) or opto-anticlockwise (0A) to produce an appropriate turn, but theresponse is inhibited by phonotaxis turn signals from BNC2.
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1−2
−1.8
−1.6
−1.4
−1.2
−1
−0.8
−0.6
−0.4
−0.2
0No sound − random tracks
metres
met
res
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1−2
−1.8
−1.6
−1.4
−1.2
−1
−0.8
−0.6
−0.4
−0.2
0No sound − random tracks corrected by opto
metres
met
res
Figure 11: Left, paths of the robot with randomly imposed turns(no sound source) and right, the same conditions with the randomturning almost fully corrected by the optomotor reflex.
In addition, there is an inhibitory connection between thephonotaxis output (BNC2) and the optomotor interneuroncorresponding to the expected turn direction. This willsuppress the optomotor response that would otherwise'correct' intended turns towards sound Note that unlike thealgorithm in Webb & Harrison (2000) the suppression isdirection specific (as hypothesised for the interaction oftracking and optomotor behaviour in the fly by Heisenberg& Wolf (1988)). The supression is the result of shuntinginhibition, which will counteract any optomotor excitationup to the strength of the predicted input, but might stillenable a response if the signal, even though in the expecteddirection, is much larger than expected. However this is notequivalent to efferent copy, which would require predictionof the exact size and time-course of the expected optomotorsignal, so as to cancel it out. This would seem to require amore complex neural mechanism to implement it. Indeed, itis theoretically impossible to make a precise predictionbecause this depends on the actual spatiotemporal pattern ofcontrast encountered during the turn, which is unknown in anon-uniform and unfamili ar environment.In figure 12 we show the results of running the robot underthe same conditions as figure 8, but with the optomotor

response also active. It is evident that the robot producesmore direct paths to the sound source with fewercorrections. The average time taken to reach the sound isalso decreased (numbers*** ). The advantage of including anoptomotor response is even more evident by looking at therobot's behaviour when it has random turns imposed, whiletrying to track sound (figure 13). The paths with phonotaxisalone diverge much further from the correct headingdirection, and on several occasions it misses the soundsource. With the optomotor response added, the tracks aremuch more direct and the random disturbance is hardlyevident.
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1−2
−1.8
−1.6
−1.4
−1.2
−1
−0.8
−0.6
−0.4
−0.2
0Phonotaxis tracks with optomotor correction
metres
met
res
Figure 12: Paths of the robot integrating phonotaxis and optomotorresponses to make a more direct approach to the sound.
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1−2
−1.8
−1.6
−1.4
−1.2
−1
−0.8
−0.6
−0.4
−0.2
0Phonotaxis tracks with random disturbance
metres
met
res
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1−2
−1.8
−1.6
−1.4
−1.2
−1
−0.8
−0.6
−0.4
−0.2
0With random turns and optomotor correction
metres
met
res
Figure 13: Comparison of paths when random turns are imposed:left, phonotaxis on its own produces very indirect paths; right, withthe optomotor reflex, the random turns have almost no effect onthe approach to sound.
While this appears to be a fairly successful way to combinethe behaviours, a number of alternatives are possible.Efferent copy has already been mentioned, but wouldrequire more complex neural processing. Two possibiliti escan be easily tested by small modifications to the circuitshown in figure 10. The first is "addititi ve" interaction in
which the connections that suppress the optomotor responseduring turns to sound are disabled, so the LF/RF activitysimply reflects the summed input of optomotor andphonotactic corrections. Note that this was the mechanismoriginally suggested by Bohm & Schildberger (1991) on thebasis of their open loop tests on the cricket. The second is"follow-on" interaction, in which the direct connection fromLT/RT to LF/RF is disabled and instead the steeringresponse to sound is controlled via the optomotor system, byexciting the appropriate optomotor integration neuron. Thisidea was first proposed (in the context of fly trackingbehaviour) by Mittelstadt (1954).Figure 14 shows the behaviour of the robot under these twoalternative schemes. While the 'follow-on' tracks appearquite direct, this is slightly misleading because the robot isactually making fewer corrections. Instead of turning to eachspike in RT or LT, at least two consecutive spikes on thesame side are needed to cause a turn when the signal isfiltered though OA or OC. Consequently, if the robot isheaded in roughly the right direction, it is unlikely to adjustits course. This might seem fairly effective behaviour for therobot, but it is not such a good resemblance to the behaviourof the cricket as the previous mechanism. The "additive"tracks are also moderately successful, but there is adiscernable tendency to approach the sound in an arc ratherthan an oscill ating track, again showing less resemblance tothe cricket. In observing the robot it is evident that this resultis due to the robot repeatedly turning towards the sound,then turning away a littl e in response to the optomotor signalproduced by its turn to the sound. The average time taken toarrive at the sound is increased.
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1−2
−1.8
−1.6
−1.4
−1.2
−1
−0.8
−0.6
−0.4
−0.2
0Phonotaxis with follow−on opto correction
metres
met
res
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1−2
−1.8
−1.6
−1.4
−1.2
−1
−0.8
−0.6
−0.4
−0.2
0Phonotaxis with additive opto correction
metres
met
res
Figure 14: paths of the robot using (left) the 'follow-on' schemeand (right) the 'additive' scheme to integrate the optomotor reflexwith phonotaxis.
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1−2
−1.8
−1.6
−1.4
−1.2
−1
−0.8
−0.6
−0.4
−0.2
0Random turns and follow−on opto correction
metres
met
res
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1−2
−1.8
−1.6
−1.4
−1.2
−1
−0.8
−0.6
−0.4
−0.2
0Random turns and additive opto correction
metres
met
res
Figure 15: as for 14 with random turns imposed on the robotduring phonotaxis.

Figure 15 shows the performance of the additive and follow-on schemes when the robot also has to deal with randomturns. Both work fairly well to remove the effects of thedisturbance (as might be expected: the optomotor behaviourin response to a random turn is the same in all threeschemes). However both produce some tracks that miss thesound source, suggesting the interaction with phonotaxis isless successful. To examine this, figures 16 & 17 shows theaverage number of attempted turns made in response tosound (produced by counting the spikes in RT & LT) underthe various conditions. Figure 16 corresponds to pathsstarting in the centre position. It is evident that all threeschemes reduce the number of corrective turns needed in thenon-random condition. However in the random condition,the number of corrective turns is greater for follow-on andadditive modes than for the original suppressive interaction.Figure 17 shows the paths starting from the left or right, andseparately indicates the number of turns needed in eachdirection. The suppression and follow-on schemes havesimilar results, but is evident that the additive schemerequires more turns; it is also evident that the distribution ofturns is very uneven, compared to the phonotaxis withoutany optomotor response. This is a reflection of the 'curved'paths produced by the additive scheme (discussed above)compared to the oscill ating paths produced by phonotaxis onits own.
no opto suppress follow−on add0
2
4
6
8
10
12
14
16
18
20
num
ber
of tu
rns
in r
espo
nse
to s
ound
Tracks from centre
normal phonotaxiswith random turns
Figure 16: The number of attempted turns to sound during pathsfrom the central starting position. Dark bars, normal paths; lightbars, paths with random turns. All the optomotor integrationschemes reduce the number of turns needed under normalconditions, but under random conditions, progressively more turnsare required by the follow-on and additive schemes.
no opto suppress follow−on add0
5
10
15
20
25
30
num
ber
of tu
rns
in r
espo
nse
to s
ound
Tracks from left or right
normal phonotaxiswith random turns
Figure 17: The number of attempted turns to sound during pathsfrom the side starting positions; bars are split to show the relativenumber of turns in each direction. The additive scheme makesalmost as many turns as phonotaxis on its own, and they are notequally often in each direction, indicating repeated corrections inone direction rather than alternating corrections.
4. Conclusion
In this paper we have used small networks of neurons tocontrol a robot so that it tracks a sensory source. So is thisany advance on W. Grey Walter's 'tortoises', demonstrated50 years ago? Despite the (humbling) similarity, we believethere are a number of significant differences. The sensorsystems for processing sound and visual motion are far moresophisticated, and allow us to replicate the real signals thatanimal brains have to deal with. As yet, the motor system isno more complex; this is one of the issues we will beaddressing in future work. The neural model, as well ascontaining more detail , is far easier to use (as software) tocopy and tune arbitrary circuits, and the behaviour of all theelements can be recorded during behaviour for full analysis.The circuits we are building are directly based onneurophysiological data, so we can test biologically relevanthypotheses, with results that can translate directly back toexperiments in biology. Nevertheless we are indebted toWalter's pioneering insight that understanding the brain isbest done within the context of a body, which has inspiredthe work reported here.
References
Böhm, H., Schildberger, K., & Huber, F. (1991). Visual andacoustic course control in the cricket Gryllus-bimaculatus. Journal of Experimental Biology, 159,235-248.
Camhi, J. &. J. E. (1999). High-frequency maneuversmediated by tactile cues: antennal wall -following in thecockroach. Journal of Experimental Biology, 202, 631-643.

Chapman, T. (2001). Morphological and Neural Modellingof the Orthopteran Escape Response. Unpublisheddoctoral dissertation, University of Stirling.
Cruse, H., Kindermann, T., Schumm, M., Dean, J., &Schmitz, J. (1998). Walknet - a biologically inspirednetwork to control six-legged walking. Neural Networks,11(7-8), 1435-1447.
Harrison, R. R., & Koch, C. (1998). An analog VLSI modelof the fly elementary motion detector . in M. I. Jordan,M. J. Kearns, & S. A. Solla (editors), Advances inNeural Information Processing Systems 10 (pp. 880-886). Cambridge, MA: MIT Press.
Heisenberg, M., & Wolf, R. (1988). Reafferent control ofoptomotor yaw torque in Drosophila-melanogaster.Journal of Comparative Physiology a-Sensory Neuraland Behavioral Physiology, 163(3), 373-388.
Horseman, G., & Huber, F. (1994). Sound localisation incrickets. I. Contralateral inhibition of an ascendingauditory interneuron. Journal of ComparativePhysiology A, 175, 389-398.
Koch, C. (1999). Biophysics of Computation. Oxford:Oxford University Press.
Lund, H. H., Webb, B., & Hallam, J. (1997). A robotattracted to the cricket species Gryllus Bimaculatus. P.Husbands, & I. Harvey (editors), Fourth EuropeanConference on Artificial Life (pp. 246-255). CambridgeMA: MIT Press.
Lund, H. H., Webb, B., & Hallam, J. (1998). Physical andtemporal scaling considerations in a robot model ofcricket calli ng song preference. Artificial Life, 4(1), 95-107.
Michelsen, A., Popov, A. V., & Lewis, B. (1994). Physics ofdirectional hearing in the cricket Gryllus bimaculatus.Journal of Comparative Physiology A, 175, 153-164.
Oldfield, B. P. (1980). Accuracy of orientation in femalecrickets, Teleogryllus oceanicus (Grylli dae): dependenceon song spectrum. Journal of Comparative Physiology,141, 93-99.
Pollack, G. S. (1998). Neural Processing of AcousticSignals. in R. R. Hoy, A. N. Popper, & R. R. Fay(editors), Comparative Hearing: Insects (pp. 139-196).New York: Berlin: Springer.
Quinn, R. D., & Ritzmann, R. E. (1998). Construction of ahexapod robot with cockroach kinematics benefits bothrobotics and biology. Connection Science, 10, 239-254.
Rheinleander, J., & Blätgen, G. (1982). The precision ofauditory lateralization in the cricket, Gryllusbimaculatus. Physiological Entomology, 7, 209-218.
Schildberger, K. (1984). Temporal selectivity of identifiedauditory interneurons in the cricket brain. Journal ofComparative Physiology , 155, 171-185.
Walter, W. G. (1961). The Living Brain. Harmondsworth,Middlesex: Penguin Books.
Webb, B. (1995). Using robots to model animals: a crickettest. Robotics and Autonomous Systems, 16(2-4), 117-134.
Webb, B. (2001). Can robots make good models ofbiological behaviour? Behavioural and Brain Sciences,24(6), 1033-1094.
Webb, B., & Harrison, R. R. (2000). Integratingsensorimotor systems in a robot model of cricketbehavior . Sensor fusion and Decentralised Control inRobotic Systems III . Boston Nov 6-8: SPIE.
Webb, B., & Scutt, T. (2000). A simple latency dependentspiking neuron model of cricket phonotaxis. BiologicalCybernetics, 82 (3), 247-269.
Weber, T., Thorson, J., & Huber, F. (1981). Auditorybehaviour of the cricket I Dynamics of compensated walkingand discrimination paradigms on the Kramer treadmill .Journal of Comparative Physiology A , 141, 215-232.