-
Network of Excellence Objective ICT-2009.3.5 Engineering of
Networked Monitoring and Control systems
FP7 – ICT- 257462 HYCON2
Highly-complex and networked control systems
Starting date: 1st September 2010 Duration: 4 years
Deliverable number D.1.1.1
Title
Filtering, estimation and system identification methods for
complex large scale systems: State of the art, potential synergies
and limitations.
Workpackage 1
Due date M12
Actual submission date 2011-08-15
Organisation name(s) of lead contractor for this deliverable
KTH
Author(s) Håkan Hjalmarsson
With the help of Alessandro Chiuso
Nature Report
Project co-funded by the European Commission within the Seven
Framework Programme (2007-2013)
Dissemination Level
PU Public X
PP Restricted to other programme participants (including the
Commission Services)
RE Restricted to a group specified by the consortium (including
the Commission Services)
CO Confidential, only for members of the consortium (including
the Commission Services)
-
Executive Summary
In this report we review the status of system identification and
estimation for complex large scale systems. We stress the
importance of understanding the fundamental limitations and the
quantification of the experimental cost required to obtain an
adequate model. For networked systems, we point out the essential
methodologies and outline a statistical basis for design and
analysis of such networks from an estimation perspective. A key
issue in all real world system identification problems is that of
model structure selection. This issue is becoming increasingly
accentuated when the system complexity grows. We point out that new
techniques are becoming available from the areas of sparse
estimation and statistical learning theory.
-
1 Introduction
Many of the engineering challenges that society is facing are
expected to beaddressed by model-based design and optimization.
Smart power grids, hy-brid and electrical vehicles and intelligent
infrastructures are examples wherethis technology will be
essential. The increasing complexity of engineeringsystems are
introducing new challenges in terms of modeling and estimation.It
is highly desirable that these systems are able to operate reliably
and au-tonomously in changing environments. This implies that these
systems haveto be equipped with “learning” abilities, i.e. they
need to be able to inferimportant properties of their environment
from a variety of sensors and toadapt their behaviour to the state
of the environment and the requirementsof the application. This
implies the ability to adapt the underlying models,using sensor
information. In order to determine when to learn, a systemmust also
be able to assess its uncertainty about the surrounding
environ-ment and its own state. It is expected that for the
learning to be effective,these systems need to be able to take
active measures, i.e. use actuators toensure that the required
information becomes available.
Several of these systems are spatially highly distributed, cf.
power gridswhich nowadays extend far beyond country limits, and it
cannot be expectedthat information from all parts of the system can
be communicated andprocessed at a single physical unit. Wireless
sensors are attractive in manycontexts but suffer from
communication limitations.
With systems being decentralized and typically containing many
actu-ators, sensors, states and non-linearities, but with limited
access to sensorinformation, model building that delivers models of
sufficient fidelity becomesvery challenging. Existing reports on
the cost and complexity of the mod-eling stage of large engineering
projects involving dynamical models seemto be confined to the
process industry. It is noted in [83] that obtainingthe process
model is the single most time consuming task in the applica-tion of
model-based control and [56] reports that three quarters of the
totalcosts associated with advanced control projects can be
attributed to model-ing. This hints that modeling risks may become
a serious bottleneck in futureengineering systems unless major
theoretical advances are made.
The objective of this report is to outline the state of the art
in the fields ofsystem identification, filtering and estimation
pertinent to complex systems.In particular fundamental limitations
and synergies with other fields will beexamined.
-
2 Fundamental limitations
2.1 The Cramér-Rao lower bound
The framework of stochastic models has proven to be extremely
powerfulfor developing useful signal processing and estimation
algorithms. In thisframework the Cramér-Rao lower bound (CRLB)
provides a lower bound onthe achievable accuracy in parameter
estimation. Let y be a random vectorwith probability density
function (pdf) pθ(·) where θ ∈ Rn. The Cramér-RaoLower Bound (CRLB)
provides a lower bound for any unbiased estimator θ̂of θ that is
based on y. Subject to certain regularity conditions (see [63]),the
covariance matrix of the parameter estimate is lower bounded by
E[
(θ̂ − θ)(θ̂ − θ)T]
≥ I−1F (pθ) (1)
where IF (pθ) is the Fisher information matrix
IF (pθ) = −E
[
∂2
∂θ∂θTlog pθ(y)
]
(2)
Under certain conditions the CRLB is achieved asymptotically (as
the num-ber of measurements grows) by the maximum likelihood (ML)
estimate:
θ̂ML = argmaxθ
pθ(y) (3)
The CRLB also translates into lower bounds on the achievable
accuracy ofsystem properties that are functions of the model
parameters. It also im-plies performance bounds for model based
applications employing identifiedmodels. Let θ̂N ∈ R
n be the estimated model parameters (we denote thetrue value by
θo and N denotes the sample size) and let Vpd(θ) be a measureof the
degradation in performance in the application that occurs when
themodel corresponding to θ is used instead of the true system in
the design ofthe application. For example consider that an
incorrect model is used in amodel based control design for which
the resulting controller then is appliedto the true system. Then
Vpd could be some norm of the difference betweenthe achieved closed
loop transfer function (using the model in the design)and the ideal
closed loop transfer function (using the true system in the
de-sign). Now consider the expected performance degradation E[θ̂N
]. Then theasymptotic version of the CRLB for dynamical models
implies (without lossof generality, we assume that Vpd ≥ 0 with
minimum Vpd(θo) = 0)
limN→∞
N E[Vpd(θ̂N )] ≥1
2Tr
{
V ′′pd(θo)I−1F
}
(4)
-
where V ′′pd(θo) denotes the Hessian of Vpd evaluated at θ = θo.
With someabuse of notation, we will call this inequality the CRLB
(for the performanceindex). It is thus important to understand how
experiment configuration (in-put excitation etc), system and model
complexity, and model structure, aswell as the property of interest
(through the performance index Vpd), influ-ence the performance of
the application in which the model is used. How-ever, much due to
the matrix inverse of IF , it is not trivial to analyze
thesedependencies and often extensive matrix manipulations are
required. Under-standing the nature of the CRLB has been subject to
rather intense researchfor a range of problem settings, including
frequency function estimation [67],multi-input identification [41],
and Hammerstein systems [81]. In order tofacilitate the analysis of
the CRLB a geometric method has been developedrecently [54]. The
idea is as follows. Suppose that the Fisher information isgiven
by
IF = 〈Ψ,Ψ〉 :=1
2π
∫ π
−π
Ψ(ejω)Ψ∗(ejω)dω
where Ψ in IF is the (normalized) prediction error gradient.
Suppose furtherthat, for simplicity, Vpd(θ) = (J(θ)− J(θo)) where
J(θo) is a scalar quantity
of interest, i.e. we are interested in assessing the variance of
J(θ̂N). Fora linear time-invariant system, the quantity J(θo) could
for example be thefrequency response at a particular frequency. The
CRLB (4) then can bewritten
limN→∞
N E[(J(θ̂N )− J(θo))2 ≥ ΛI−1F Λ
∗ (5)
where Λ = dJ(θ)dθ
∣
∣
θ=θo. Now take a function γ such that
Λ = 〈γ,Ψ〉 :=1
2π
∫ π
−π
γT (ejω)Ψ(e−iω)dω
Then it is easy to show that
ΛI−1F Λ∗ =
∥
∥ProjSΨ{γ}∥
∥
2(6)
where ProjSΨ{γ} denotes the orthogonal projection of γ onto SΨ,
the columnspaceof Ψ, i.e.
ProjSΨ{γ} = Ψ〈Ψ,Ψ〉−1〈Ψ, γ〉
The expression (6) turns the focus to subspace SΨ when analyzing
the CRLB.In many cases this subspace can easily be derived allowing
structural prop-erties of the CRLB to be deduced, e.g. that a
certain sensor does not pro-vide any information whatsoever of
J(θo), the quantity of interest. Examples
-
where this technique have been used are variance analysis for
estimated polesand zeros [79], frequency response estimation [72],
optimal experiment designminimum variance control [75] and
errors-in-variables problems [55].
2.2 Invariants
For linear time invariant (LTI) single-input single-output
systems, it has beenshown in [98] that an invariant, or water-bed
effect, holds for the asymptoticvariance of the frequency function
estimate AsVarG(ejω, θ̂N ). For outputerror models this effect can
be expressed as
1
2π
∫ π
−π
Φu(ω) AsVarG(ejω, θ̂N) dω = λe n (7)
where Φu is the input spectrum, λe is the noise variance and n
is the numberof estimated parameters.
2.3 Cost of complexity
As mentioned in the introduction, the modeling costs have turned
out tobe very high in process industry. For the advanced
engineering applicationsenvisioned for the future it therefore
seems relevant to investigate what theexperimental cost will be for
identifying models of sufficiently accuracy. Thebasis for a
theoretical investigation of this issue is the observation that
theCRLB is influenced by the experimental conditions (through Ψ in
(4)). Thusin principle it is possible compute the minimum
experimental cost requiredto obtain a model which is accurate
enough that some performance indexcan be guaranteed in the
application. The quantification of how this costdepends on
performance requirements of the application and system/
modelcomplexity we will call the cost of complexity. This quantity
allows the user tomake informed trade-offs, e.g. between
performance specs. in the applicationand the experimental cost. The
variance expressions developed in [67] canbe seen as an early
contribution to this problem. More recently, frequencyfunction
estimation has been considered in [102, 97]. For a finite
impulseresponse model of order n it is shown that if the maximum
error over thefrequency band [0, ωB] is 1/γ, then the cost of
complexity, as measured bythe required input energy during the
identification experiment, is given byλγωB/π where λ is the noise
variance.
The cost of complexity is the resulting minimum of the criterion
obtainedin the least-costly identification framework proposed in
[17].
-
3 Applications-oriented experiment design
3.1 Introduction
For complex systems and high performance applications, not only
will it beimportant to assess the cost of complexity, it will also
be important to beable to compute experiments that achieve the
minimum experimental cost.
The concept of least-costly identification was introduced in
[18] and de-veloped in a series of conference contributions,
appearing later as [17]. Theidea is to formulate the experiment
design problem such that the objective isto minimize the
experimental cost, typically measured in terms of requiredinput and
output energy, subject to constraints on the model’s
accuracy.Optimal experiment design has witnessed a revival in
system identificationduring the last decade, see, e.g., [91, 37,
65, 66, 12, 14, 13, 59, 108, 73, 99,109, 95, 101, 38, 92, 8, 16, 7,
46]. Much of the effort has been devoted toreformulate optimal
experiment problems to computationally tractable con-vex
optimization problems and to connect optimal experiment design
forparametric identification methods, such as prediction error
identification, tocontrol applications [64, 47, 57, 58, 74, 10, 48,
11, 17, 53, 9, 52, 39].
3.2 A framework
In [50] a quite general framework is outlined. Consider a
specific applicationand suppose that a measure of the performance
degradation Vpd, as discussedin Section 2.1, is available. All
conceivable models can now be split into twosets: The first, which
we call the set of acceptable models Eapp, is the set forwhich the
performance degradation measure is sufficiently small, say less
than1/γ for some γ > 0 (which we will refer to as the accuracy),
while the secondset is the set of all other models, which then from
the applications pointof view are unsatisfactory. From this
perspective the objective of systemidentification is to produce a
model estimate in the set of acceptable modelsEapp. One can then
formulate a least-costly experiment design problem withthis as
constraint. Building on previous work it is shown in [50] that a
wideclass of applications-oriented optimal experiment design
problems can becast as semi-definite programs for linear
time-invariant systems. Preliminaryresults on extension to
nonlinear systems are given in [60].
-
3.3 Added value of optimal experiment design to system
identification
In [49, 50] it is argued that least-costly optimal experiment
design simplifiesthe overall system identification problem in
several aspects. Firstly, if pos-sible, only properties important
to the application are excited in the system(in the interest of
minimizing the experimental effort). Consequently, systemproperties
irrelevant to the application are not excited (if it can be
avoided).This means that sometimes simplified models can be used
without loss of ac-curacy in the application. For example, in a
mechanical system, resonancesthat not will be excited during the
application will not be excited duringthe system identification
experiment either. Formal results are given in [73].Clearly this
issue is very important for identification complex systems.
In [97] it is argued that the importance of the model structure
is re-duced when applications-oriented optimal experiment design is
used. Thishints that high order general purpose models may be
competitive to modelstailored to the particular system to be
modeled.
3.4 Implementation
Optimal experiment designs typically depend on the true system
and there-fore cannot be implemented directly. A common route to
handle this “chickenand egg” problem is to make the design adaptive
whereby the model is iden-tified recursively and the most recent
estimate is being used to replace thetrue system in the experiment
design, which consequently is updated as themodel estimate is
updated. In [39] it is shown formally that as time increasesthis
procedure provides almost as good result as if the true system had
beenused in the experiment design. A first attempt of a specific
algorithm tailoredfor Model Predictive Control is presented in
[61].
The added value of applications-oriented optimal experiment
design dis-cussed above, i.e. the possibility to use models of
restricted complexity, isillustrated in [96] where it is proved
that when adaptive experiment designis used it is sufficient to use
a two parameter finite impulse response modelto consistently
estimate the non-minimum phase zero of a stable linear
time-invariant system of arbitary order. The algorithm require
little in terms ofprior knowledge.
-
4 Networked Systems and Structured Systems
4.1 Introduction
Distributed large scale systems require interconnectivity
implemented by wayof networks. Cheap computational and wireless
transmission devices com-bined with a wide range of emerging new
sensors and actuators, in turnenabled by new technologies such as
micro- and nanosystems, have openedup for the use of networked
control systems on a large scale [5].
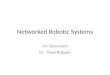
Characteristic to networked systems are that they consist of
“components”that are spatially distributed. Each component can be
viewed as consistingof a physical part and an engineered device, in
turn consisting of sensors,actuators and a processing unit. The
physical parts may be interconnected inrather arbitrary ways
(depending on the type of system) while the processingunits are
interconnected by communication networks, see Figure 1.
Sensing
ActuationCommunic-
ationProces
singPhysics Process
ing
Process
ing
Process
ing
Sensing
Actuation Communic-
ation
Communic-
ation
Communic-
ation
Actuation
Actuation Sensing
Sensing
Comm. Network
Figure 1: A networked system.
This configuration changes the perspective of control design in
two as-pects: Firstly, the (dynamic) properties of the
communication network have
-
to be accounted for, and, secondly, the distributed nature of
the system is em-phasized. Large efforts have been (and still are)
devoted to develop dynamicmodels for communication networks. These
models depend very much onthe particular technology that is used,
e.g. wired and wireless networks ex-hibit widely different
characteristics. In particular, attention has been givento wireless
networks, but there is also extensive work on wired networks,e.g.
the Internet [110]. Some features of wireless networks include
samplingtime jitter, random packet losses and delays, and
requirements of low gradequantization. Constraints on power
consumption, costs, and channel capac-ity are consequences of the
distributed nature which limits local informationprocessing and
information exchange between the components.
Following [68], we will discuss some aspects that arise when a
system isto be identified in a networked environment characterized
by limitations indata communication and the possibility/necessity
of local data processing,e.g., due to the communication
constraints. Two main scenarios can beconsidered:
1) Fusion centric
2) Fully decentralized
where in the first scenario nodes transmit information to a
fusion center forfinal processing, whereas in the second scenario
no such center exists butnodes have to update each other with as
little coordination, synchronizationand communication as possible.
Next we will discuss the statistical basis foridentification under
such schemes.
4.2 A statistical basis
Consider the problem of estimating θ in a networked system. Let
ptotθ denotethe joint pdf of all measurements in the system. Then
the Fisher informationmatrix I−1F (p
totθ ) is a universal lower bound for the covariance matrix of
any
unbiased parameter estimate. Notice that (3) requires the
processing of allmeasurements, i.e. all data has to be gathered at
a “fusion center” and beprocessed there, according to (3). When
measurements are processed locallybefore being transmitted to the
fusion center one may therefore expect a lossin accuracy. However,
information loss does not occur when measurementsin one sensor are
condensed into a sufficient statistics [63]. Thus, regardlessof
fusion centric or fully decentralized schemes, unless sufficient
statistics aretransmitted information loss will occur.
A subtle issue arises when the nodes are privy to local
information re-garding their own measurement process. It may be
that the processed mea-surements should be weighted according to
some information available only
-
locally. In a fully decentralized context [125] communicates the
necessaryweights explicitly whereas in [6] the weighting is done
locally.
Another subtle issue arises when the transmission of information
fromthe sensors to the fusion center is subject to rate
constraints. It may thenhappen that ancillary statistics may
improve upon the estimate. An ancillarystatistic is a statistic
whose distribution does not depend on the unknownparameters. We
refer to the surveys [42, 124] and references therein for detailsof
the problem when the transmission to the fusion center is rate
constrained.
4.3 The impact of noise
When measurements at different nodes are correlated, it is no
longer sufficientto distribute the local sufficient statistics
between nodes, or to a fusion center.In this case the situation is
much more complex. However, there exists asimple condition for when
locally linearly processed measurements can becombined into the
centralized linear minimum mean variance estimate [104].
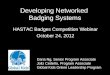
4.4 The impact of structure
Consider the distributed multi-sensor network in Figure 2 where
sensor imay transmit the measurement yi to a fusion center. Both
transfer functionsG1 and G2 are unknown. Consider now the
identification of the transferfunction G1. From the figure it is
clear that measurements from Sensor 1provide information regarding
this transfer function. However, it also seemssomewhat obvious that
Sensor 2 can contribute to improving the accuracy ofthe estimate of
G1 since y2 = G2G1u+ e2. However, in [51, 116] it is shownthat
under certain configurations of the model structures used for G1
and G2,Sensor 2 contains almost no information regarding G1 even if
the signal tonoise ratio of this sensor is very high. The result
can easily be generalized toarbitrary number of nodes in a cascade
structure. A dual result is developedin [41] regarding how
additional inputs affect the modeling accuracy.
4.5 Communication aspects
We will now discuss some of the issues associated with
transmitting informa-tion over a communication channel.
Bandwidth limitations One aspect is that the capacity of some
com-munication channels is so low that it has to be accounted for.
One suchtypical constraint is that the available bit rate may be
restricted so that theinformation has to be quantized before
transmission.
-
G1 G2u u2
e1 e2y1 y2
Figure 2: A distributed multi-sensor network. The sensor
measurements y1and y2, together with the input u are used by a
fusion center to estimate G1and G2.
Example 1 Suppose that node i in a network measures the
scalar
yi = θ + ei
where ei are independent normal distributed random variables
with zero meanand variance λ. When each node only can relay whether
yi exceeds a certainthreshold T (common to all nodes) or not, to
the fusion center, it can beshown that the CRLB is at least a
factor π
2above the CRLB for the non-
quantized case [88]. The optimal threshold is T = θ, and
therefore infeasiblesince θ is unknown. We refer to [94] for
further details.
Results on quantized identification in a very general setting
can be found in[118, 119, 120].
Sampling time jitter By way of a frequency domain analysis it is
shownin [36] that sampling time jitter induces bias. It is also
shown how to compen-sate for this problem. In the case of
time-stamping of packets, a continuoustime instrumental variable
method is used in [117] to cope with irregularsampling.
4.6 Relation to other areas
There are obvious connections between fully distributed
identification anddistributed optimization, see e.g. [114, 15]. A
widely studied area is dis-tributed estimation where nodes share
information regarding some randomvector that is to be estimated.
Relevant questions are whether the nodes willconverge to the same
estimate as the information exchange increases, and ifso, whether
the nodes reach a consensus and the quality of this estimate
ascompared to the centralized estimate, see, e.g., [19]. Wireless
sensor networksis also a closely related area [69]. A popular class
of methods are consensusalgorithms where nodes are ensured to
converge to the same result despiteonly local communication between
nodes.
-
4.7 Summary
We have seen that identification of networked systems is a
multifaceted prob-lem with close ties to fields such as distributed
estimation and optimization.Whereas for a fix set-up, the CRLB
provides a lower bound on the estimationaccuracy, the main
challenge when there are communication constraints isto device the
entire scheme: When, what and where should a node transmitin order
to maximize accuracy? For example, suppose that it is possible
totransmit all raw data to a fusion center but that the
communication channelis subject to noise. Then it may still be
better to pre-process the measure-ments locally before
transmission.
5 Model structure selection
5.1 Introduction
When collecting data from a (physical) control system, it is
often the casethat there is an underlying interconnection
structure; for instance the over-all system could be the
interconnection via cascade, parallel, feedback andcombinations
thereof, of many dynamical systems. In this scenario any
givenvariable may be directly related to only a few other
variables. One conve-nient and popular way of graphically
describing these relations is via so calledgraphical models
[62].
This sort of structures, which may be self-evident in certain
engineeringdomains where the system has been designed via
interconnection of smallerparts, pops also up when modeling
phenomena described through a largenumber of variables. These
interconnections, such as parallel, series or feed-back, may be
intrinsic such as in economic and social “systems”.
In the static Gaussian case, the “relation” between variables
can be ex-pressed in terms of conditional independence conditions
between subsets ofthem, see e.g. [31]. Estimation of sparse
graphical models have been the sub-ject of intense research which
is impossible to survey here; we only point thereader to the early
paper [78] which propose using the Lasso to this purpose.
In the dynamic case, i.e. when observed data are trajectories of
(pos-sibly stationary) stochastic processes, one may consider
several notions ofconditional independence which can be encoded via
the so-called time seriescorrelation (TSC) graphs, Granger
causality graphs and “partial correlation”graphs, see [29] for
details. When the number of measured variables is verylarge and
possibly larger than the number of data available (i.e. the num-ber
of “samples” available for statistical inference), even though
there is no“physical” underlying interconnected system,
constructing meaningful mod-
-
els which are useful for prediction/monitoring/intepretation
requires tradingoff model complexity vs. fit. In a parametric setup
this complexity dependson the number of parameters which is related
to both the complexity of each“subsystem” (e.g. measured via its
order) as well as to their number (i.e. thenumber of dynamical
systems which are “non zero”).
Model structure selection is combinatorial in nature as it is
desirable toassess the performance of all possible model structures
and model orders.For autonomous system identification of complex
systems this is thus one ofthe key problems.
Estimation problems involving variable selection, which can be
also framedas determining connectivity in a suitable graphical
description, have beenrecently studied in the literature, see for
instance [112, 80, 76, 77] and ref-erences therein. In the paper
[112] coupled nonlinear oscillators (Kuramototype) are considered
where the coupling strengths are to be estimated; in[80] nonlinear
dynamics are allowed and the attention is restricted to thelinear
term1 in the state update equation, equivalent to a vector
autoregres-sive (VAR) model of order one. In both cases it is
assumed that the entirestate space is measurable and an
ℓ1-penalized regression problem is solvedfor estimating the
coupling strenghts/linear approximations. Sparse modelsunder
“smoothing” conditional independence relations, encoded by
“partialcorrelation” graphs or equivalently via zeros in the
inverse spectrum [21],have been recently studied in the literature.
For instance, in [106] considersVAR models and ℓ1-type penalized
regression while in [76, 77] a methodol-ogy based on smoothing a la
Wiener is proposed, where interconnections arefound by putting a
threshold on the estimated transfer functions.
We shall now focus on Granger causality concepts, where
conditional in-dependence conditions encode the fact that the
prediction of (the future of)one variable (which we shall call
“output variable”) may require only the pasthistory of few other
variables (which we shall call “inputs”) plus possibly itsown past.
This can be represented with a graph where nodes are variablesand
(directed) edges are (non zero) transfer functions, self-loops
encodingdependence on the “output” own past2. The concept of
Granger causalityis, in fact, the most “natural” description in the
context of causal controlsystems since, under rather mild
conditions [40], the model obtained in thisway is the unique
internally stable feedback interconnection which describesthe
second order statistics of the stationary process under study. In
generalboth the dynamical systems and the interconnection structure
are unknown
1Thinking of a first order Taylor expansion around the
trajectory2In the language of classical System Identification,
dependence of the predictor on the
past outputs will result in ARMAX models, lack of dependence in
Output Error (OE)models.
-
and have to be inferred from data. Without loss of generality we
shall ad-dress the problem of modeling the relation between one
node in this graph(the “output” variable) and all the other
measured variables (the “inputs”). The focus is both on performing
variable selection, i.e. finding the un-derlying connections in the
graphical model encoding the Granger causalitystructure, as well as
obtaining reliable and easily interpretable models whichcan be
used, e.g. for prediction/monitoring etc.
Such sparsity principle permeates many well known techniques in
machinelearning and signal processing such as feature selection,
selective shrinkageand compressed sensing [45, 32]. We shall now
review some of the basictools and then we shall come back to the
variable selection and identificationproblem.
5.2 Sparse estimation
Many approaches have been suggested to deal with model structure
selectionIn Forward Selection regressors are added one by one
according to how statis-tically significant they are [121]. Forward
stepwise selection and LARS (LeastAngle Regression) [35] are
refinements of this idea. Backwards eliminationis another approach
with a long history. Here regressors are removed one byone. Another
class of methods employ all regressors but use thresholding toforce
insignificant parameters to become zero [34]. Another class of
methodsthat can handle all regressors at once use regularization,
i.e. a penalty onthe size of the parameter vector is added to the
cost function. This approachhas close ties with Bayesian
estimation. Ridge regression is a classical reg-ularization method
where penalty is proportional to the squared 2-norm ofthe parameter
vector. While this method “pulls” parameters towards zero,it does
not generate sparse estimates, i.e. even though parameters may
besmall they are generically non-zero.
5.3 LASSO
An important insight has been that the regularization can be
chosen so thatsparse estimates are obtained in a one-shot
procedure. The LASSO (LeastAbsolute Shrinkage Selection Operator)
is one of the early contributions tothis field, and has been of
tremendous influence [111]. This algorithm per-forms minimization
under a constraint of the ℓ1-norm of the parameter vector
-
θ ∈ Rn. More precisely the criterion is
minθ
VN(θ)
s.t. ‖θ‖1 ≤ c(8)
Above VN(θ) is the least-squares cost function based on N
samples. Forlinear regression problems
Y = Φθ + E
where Φ is the regressor matrix, the above problem is
convex.Sparse approximation and the closely related area compressed
sensing has
been a very active research area in the last few years, e.g.
[22], [33].
5.4 Extensions
There exists a number of variations of the ℓ1-trick underlying
LASSO. InGroup Lasso, [126], or Sum-Of-Norms regularization the
parameters aregrouped into several groups where the sum of the
norms of all groups areused in the regularization.
By instead penalizing changes in the parameters, ℓ1-segmentation
algo-rithms can be developed [86]. Linear parameter varying and
hybrid modelscan be estimated with similar algorithms. In [86] it
is shown that this ap-proach is highly competitive as compared to
existing algorithms.
The ℓ1-trick can also be applied to smoothing problems, e.g.
when dis-turbances change abruptly [84] and [85].
Another related framework usually referred to as “Sparse
Bayesian Learn-ing”, whose origins can be traced back to the so
called “Automatic RelevanceDetermination” of [70] and to the
“Relevance Vector Machine” [113], alsoprovide quite powerful tools
for identification of complex systems; see e.g.the preliminary
results presented in [25, 27].
With reference to the linear problem
Y = Φθ + E, θ := [θ1, .., θn]⊤
the main idea of sparse Bayesian learning is to assume a prior
on θ, where thecomponents θi are independently distributed as θi ∼
N (0, λi), and then tolift the problem of enforcing sparsity from
parameter space such as in Lasso[111] to the “scale factors” λi ≥
0.
This approach has interesting connections with Lasso and
Multiple KernelLearning [4] as studied in [123, 2].
-
5.5 Choosing the Regularization Parameter
The choice of the regularization parameter λ in (8) is usually
done by way ofcross-validation or generalized cross-validation; the
regularization that per-forms best on fresh data is chosen. This
requires solving (8) a number oftimes. In [100] it is shown that
AIC provides a way to directly obtain areasonable value for λ. The
idea is based on the observation that the fullleast squares
estimate (let us denote it θ̂LSN ) can model the true system.
Thissuggests to find the estimate with smallest norm that has the
same model fitas the full least-squares estimate. This leads to an
Akaike-like constraint.
5.6 Bayesian methods for joint variable selection and
identification
In this section, following [26, 25, 27], we briefly describe a
Bayesian pointof view to joint variable selection and
identification of (sparse) linear sys-tems. The starting point is
the new identification paradigm developed in[90] that relies on
nonparametric estimation of impulse responses (see also[89] for
extensions to predictor estimation). In the paper [27], expandingon
the recent works [26, 25], this nonparametric paradigm is extended
tothe design of optimal linear predictors so as to jointly perform
identificationand variable selection. Without loss of generality,
analysis may restricted toMISO systems, where the variable to be
predicted is called “output variable”and all the other (say m − 1)
available variables are called “inputs”. In thisway we interpret
the predictor as a system with m inputs (given by the pastoutputs
and inputs) and one output (output predictions). Thus,
predictordesign amounts to estimating m impulse responses modeled
as realizationsof Gaussian processes.
In [27] two new approaches are introduced: the first, which has
beencalled Stable-Spline GLAR (SSGLAR), is based on the GLAR
algorithm in[127] and can be seen as a variation of the so-called
“elastic net” [128]; thesecond, which has been called Stable-Spline
Exponential Hyperprior (SSEH)assigns an exponential hierarchical
hyperprior with a common hypervarianceto the scale factors. This
second approach has connections with the so-calledRelevance Vector
Machine in [113]. The hyerarchical hyperprior favors spar-sity
through an ℓ1 penalty on kernel hyperparameters. Inducing sparsity
byhyperpriors is an important feature of this second approach. In
fact, thispermits to obtain the marginal posterior of the
hyperparameters in closedform and hence also their estimates in a
robust way. Once the kernels areselected, the impulse responses are
obtained in closed form via the Represen-tation Theorem [3].
However, SSEH requires solving a non-linear optimiza-
-
tion problem which may benefit from a “good” initialization. It
has beenverified in [27] that a “Bayesian” forward-selection
procedure which works onthe marginal density of the hyperparameters
provides a robust and computa-tionally attractive way of
initializing SSEH. It is interesting to observe
that,asymptotically, this procedure is equivalent to a forward
selection based onthe BIC criterion [105]; yet the nonparametric
description allows to computemarginals in closed for and, as such,
all our results apply without any ap-proximation to any finite
segment of data.The paper [27] contains extensive numerical
experiments involving sparseARMAX systems showing that these new
approaches approach provide adefinite advantage over both the
standard GLAR (applied to ARX models)and PEM (equipped with AIC or
BIC) in terms of predictive capability onnew output data while also
effectively capturing the “structural” propertiesof the dynamic
network, i.e. being able to identify correctly, with high
prob-ability, the absence of dynamic links between certain
variables.
6 Filtering and Estimation
Also for large scale systems, filtering and estimation typically
has to be car-ried out in a decentralized way.
Decentralized filtering has many applications, e.g. robotics
[103]. In earlywork the nodes required access to the global
estimate [44, 122]. Subsequentlyfusion centric algorithms were
developed where nodes operate locally andtransmit their local
estimates and error covariances to a fusion center [28,43]. An
early reference to a completely decentralized method is [93].
Thisalgorithm requires all nodes to be able to communicate with
each other; inpractice a quite limiting constraint. One approach
has been to use ideas fromconsensus and gossip algorithms [87].
This means that the information ateach node is spread throughout
the network in between sampling instancesby way of continuous
information exchange between neighbors governed bya consensus
algorithm. The algorithm in [125], referred to in Section
4.2,belongs to this class of algorithms. Consensus filters now
exists for a varietyof contexts, e.g. [23, 30, 24, 115, 107].
In most consensus algorithms information exchange takes place
repeat-edly between nodes inbetween measurement updates. This
allows informa-tion to spread beyond neighbours so that when the
network graph is con-nected each node possess information from all
other nodes.
When each node is only allowed to communicate with each
neigbors, andonly once between measurements the situation changes
drastically and the
-
global Kalman filter cannot be achieved. This scenario is
considered in, e.g.,[1].
Closely related to consensus filtering is to see the Kalman
filtering prob-lem as an optimization problem and use ideas from
decentralized optimiza-tion. Dual decomposition is used in [71]. A
very recent idea in decentralizedoptimization is the alternating
direction method of multipliers [20].
In certain networks extensive use of sensors is prohibited. For
examplein wireless sensor networks with battery operated sensors
and transmittersenergy limits the use of sensors. A separate
problem then becomes how toschedule the sensor operation. This is
outside the scope of this report andwe refer to the recent [82] for
references to this area.
7 Summary
Identification and estimation of complex large scale systems is
very challeng-ing. We have pointed to that it is important to
assess the experimental costof obtaining adequate models for such
systems. We observed that a sta-tistical framework is suitable for
designing and analysing networked systemidentification and
estimation algorithms.
It is clear that techniques from neighboring fields offer
interesting oppor-tunities for the field: Gossip and consensus
algorithms, sparse estimation,Gaussian processes and distributed
optimization techniques are some of theinteresting ones.
References
[1] P. Alriksson and A. Rantzer. Model based information fusion
in sensornetworks. In Proceedings of the 17th IFAC World Congress,
Seoul,Korea, July 2008.
[2] A. Aravkin, J. Burke, A. Chiuso, and G. Pillonetto. Convex
vs noncon-vex approaches for sparse estimation: Glasso, multiple
kernel learningand hyperparameter glasso. In IEEE Conf. on Dec. and
Control, toappear, 2011.
[3] N. Aronszajn. Theory of reproducing kernels. Transactions of
theAmerican Mathematical Society, 68:337–404, 1950.
[4] F. R. Bach, G. R. G. Lanckriet, and M. I. Jordan. Multiple
kernellearning, conic duality, and the SMO algorithm. In ICML ’04:
Proceed-
-
ings of the twenty-first international conference on Machine
learning,page 6, New York, NY, USA, 2004. ACM.
[5] J. Baillieul and P. J. Antsaklis. Control and communication
challengesin networked real-time systems. Proc. of the IEEE,
95(1):9–28, Jan.2007.
[6] S. Barbarossa and G. Scutari. Decentralized
maximum-likelihood esti-mation for sensor networks composed of
nonlinearly coupled dynamicalsystems. IEEE Trans. Signal Proc.,
55(7):3456–3470, Jul. 2007.
[7] M. Barenthin. Complexity Issues, Validation and Input Design
forControl in System Identification. Doctoral thesis, KTH,
Stockholm,Sweden, 2008.
[8] M. Barenthin, X. Bombois, H. Hjalmarsson, and G. Scorletti.
Identi-fication for control of multivariable systems: Controller
validation andexperiment design via LMIs. Automatica,
44(12):3070–3078, 2008.
[9] M. Barenthin and H. Hjalmarsson. Identication and control:
Jointinput design and H∞ state feedback with ellipsoidal parametric
uncer-tainty via LMIs. Automatica, 44(2):543–551, 2008.
[10] M. Barenthin, H. Jansson, and H. Hjalmarsson. Applications
of mixedH∞ and H2 input design in identification. In 16th World
Congresson Automatic Control, Prague, Czech Republik, 2005. IFAC.
PaperTu-A13-TO/1.
[11] M. Barenthin, H. Jansson, H. Hjalmarsson, J. Mårtensson,
andB. Wahlberg. A control perspective on optimal input design in
systemidentification. In Forever Ljung in System Identification,
chapter 10.Studentlitteratur, September 2006.
[12] G. Belforte and P. Gay. Optimal experiment design for
regressionpolynomial models identification. International Journal
of Control,75(15):1178–1189, 2002.
[13] G. Belforte and P. Gay. Optimal input design for
set-membership iden-tification of Hammerstein models. International
Journal of Control,76(3):217–225, 2003.
[14] K. Bernaerts, R. D. Servaes, S. Kooyman, K. J. Versyck, and
J. F. VanImpe. Optimal temperature input design for estimation of
the square
-
root model parameters: parameter accuracy and model validity
restric-tions. International Journal of Food Microbiology,
73(2-3):145 – 157,2002.
[15] D. P. Bertsekas and J. N. Tsitsiklis. Parallel and
Distributed Compu-tation: Numerical Methods. Prentice-Hall, New
York, 1989.
[16] X. Bombois and H. Hjalmarsson. Optimal input design for
robust H2deconvolution filtering. In 15th IFAC Symposium on System
Identifi-cation, Saint-Malo, France, July 2009.
[17] X. Bombois, G. Scorletti, M. Gevers, P. M. J. Van den Hof,
andR. Hildebrand. Least costly identification experiment for
control. Au-tomatica, 42(10):1651–1662, 2006.
[18] X. Bombois, G. Scorletti, P. M. J. Van den Hof, M. Gevers,
andR. Hildebrand. Least costly identification experiment for
control. InProceedings of 16th MTNS, Leuven, Belgium, July
2004.
[19] V. Borkar and P. P. Varaiya. Asymptotic agreement in
distributedestimation. IEEE Trans. Aut. Control, 27(3):650–655,
Jun. 1982.
[20] S. Boyd, N. Parikh, E. Chu, B. Peleato, and J. Eckstein.
Distributed op-timization and statistical learning via the
alternating direction methodof multipliers. Foundations and Trends
in Machine Learning, 3(1):1–124, 2011.
[21] D.R. Brillinger. Time series: Data analysis and theory.
Holden-Day,1981.
[22] E.J. Candès, J.R. Romberg, and T. Tao. Stable signal
recovery fromincomplete and inaccurate measurements. Communications
on pureand applied mathematics, 59:1207–1223, 2006.
[23] R. Carli, A. Chiuso, L. Schenato, and S. Zampieri.
Distributed kalmanfiltering based on consensus strategies. IEEE
Journal on Selected Areasin Communications, 26(4):622–633, May
2008.
[24] R. L. G. Cavalcante and M. Bernard. Adaptive filter
algorithms foraccelerated discrete-time consensus. IEEE
Transactions on Signal Pro-cessing, 58(3):1049–1058, Mar 2010.
[25] A. Chiuso and G. Pillonetto. Learning sparse dynamic linear
systemsusing stable spline kernels and exponential hyperpriors. In
Proceedingsof Neural Information Processing Symposium, Vancouver,
2010.
-
[26] A. Chiuso and G. Pillonetto. Nonparametric sparse
estimators for iden-tification of large scale linear systems. In
Proceedings of IEEE Conf.on Dec. and Control, Atlanta, 2010.
[27] A. Chiuso and G. Pillonetto. A Bayesian approach tosparse
dynamic network identification. Technical report, Uni-versity of
Padova, 2011. submitted to Automatica, available
athttp://automatica.dei.unipd.it/people/chiuso.html.
[28] C. Y. Chong. Hierarchical estimation. In Proc. 2nd MIT/ONR
CWorkshop, Monterey, CA, July 1979.
[29] R. Dahlhaus and M. Eichler. Highly structured stochastic
systems, chap-ter Causality and graphical models in time series
analysis, pages 115–137. Oxford University Press, 2003.
[30] M. A. Demetriou. Design of consensus and adaptive consensus
filtersfor distributed parameter systems. Automatica,
46(2):300–311, Feb2010.
[31] A.P. Dempster. Covariance selection. Biometrics,
28(1):157–175, 1972.
[32] D. Donoho. Compressed sensing. IEEE Trans. on Information
Theory,52(4):1289–1306, 2006.
[33] D. L. Donoho. Compressed sensing. IEEE Transactions on
InformationTheory, 52(4):1289–1306, April 2006.
[34] D.L. Donoho and I.M. Johnstone. Ideal spatial adaptation by
waveletshrinkage. Biometrika, 81(3):425–455, 1994.
[35] B. Efron, T. Hastie, I. Johnstone, and R. Tibshirani. Least
angleregression. Annals of Statistics, 32(2):407–451, 2004.
[36] F. Eng and F. Gustafsson. Identification with stochastic
sampling timejitter. Automatica, 44(3):637–646, 2008.
[37] U. Forssell and L. Ljung. Some results on optimal
experiment design.Automatica, 36(5):749–756, May 2000.
[38] Gaia Franceschini and Sandro Macchietto. Model-based design
of ex-periments for parameter precision: State of the art. Chemical
Engi-neering Science, 63(19):4846 – 4872, 2008.
-
[39] L. Gerencsér, H. Hjalmarsson, and J. Mårtensson.
Identification ofARX systems with non-stationary inputs -
asymptotic analysis with ap-plication to adaptive input design.
Automatica, 45(3):623–633, March2009.
[40] M. Gevers and B.D.O. Anderson. On jointly stationary
feedback-freestochastic processes. IEEE Trans. Aut. Contr.,
27:431–436, 1982.
[41] M. Gevers, L. Miskovic, D. Bonvin, and A. Karimi.
Identification ofmulti-input systems: variance analysis and input
design issues. Auto-matica, 42(4):559–572, 2006.
[42] T. S. Han and S. Amari. Statistical inference under
multiterminal datacompression. IEEE Trans. Inf. Theory,
44(6):2300–2324, oct 1998.
[43] H. R. Hashemipour, S. Roy, and A. J. Laub. Decentralized
structuresfor parallel kalman filtering. IEEE Transactions on
Automatic Control,33(1):88–94, Jan 1988.
[44] M. F. Hassan, G. Salut, M. G. Singh, and A. Titli. A
decentralizedcomputational algorithm for the global kalman filter.
IEEE Transac-tions on Automatic Control, 23:262–268, Apr 1978.
[45] T. J. Hastie and R. J. Tibshirani. Generalized additive
models. InMonographs on Statistics and Applied Probability, volume
43. Chapmanand Hall, London, UK, 1990.
[46] R. Hildebrand. Optimal inputs for FIR system
identification. In 47thIEEE Conference on Decision and Control,
pages 5525–5530, Cancun,Mexico, 2008.
[47] R. Hildebrand and M. Gevers. Identification for control:
Optimal in-put design with respect to a worst-case ν-gap cost
function. SIAM J.Control Optim, 41(5):1586–1608, 2003.
[48] R. Hildebrand and G. Solari. Identification for control:
Optimal in-put intended to identify a minimum variance controller.
Automatica,43(5):758–767, 2007.
[49] H. Hjalmarsson. From experiment design to closed loop
control. Auto-matica, 41(3):393–438, March 2005.
[50] H. Hjalmarsson. System identification of complex and
structured sys-tems. In European Control Conference, pages
3424–3452, Budapest,Hugary, 2009. Plenary address.
-
[51] H. Hjalmarsson. System identification of complex and
structured sys-tems. European Journal of Control, 15(4):275–310,
2009. Plenary ad-dress. European Control Conference.
[52] H. Hjalmarsson and H. Jansson. Closed loop experiment
design for lin-ear time invariant dynamical systems via LMIs.
Automatica, 44(3):623–636, 2008.
[53] H. Hjalmarsson and J. Mårtensson. Optimal input design for
identifica-tion of non-linear systems: Learning from the linear
case. In AmericanControl Conference, New York City, USA, July 11-13
2007.
[54] H. Hjalmarsson and J. Mårtensson. A geometric approach to
varianceanalysis in system identification. IEEE Transactions on
AutomaticControl, 56:983–997, 5 2011.
[55] H. Hjalmarsson, J. Mårtensson, C.R. Rojas, and T.
Söderström. On theaccuracy in errors-in-variables identification
compared to prediction-error identification. Automatica, 2011. To
appear.
[56] M. A. Hussain. Review of the applications of neural
networks in chem-ical process control – simulation and on-line
implementation. ArtificialIntelligence in Engineering, 13:55–68, 1
1999.
[57] H. Jansson. Experiment design with applications in
identification forcontrol. Doctoral thesis, KTH, Stockholm, Sweden,
2004.
[58] H. Jansson and H. Hjalmarsson. Input design via LMIs
admittingfrequency-wise model specifications in confidence regions.
IEEE Trans-actions on Automatic Control, 50(10):1534–1549,
2005.
[59] C. Jauberthie, L. Denis-Vidal, P. Coton, and G.
Joly-Blanchard. Anoptimal input design procedure. Automatica,
42(5):881 – 884, 2006.
[60] C. A. Larsson, H. Hjalmarsson, and C. R. Rojas. On optimal
inputdesign for nonlinear FIR-type systems. In Proceedings 49th
IEEE Con-ference on Decision and Control, Atlanta, GA, USA,
2010.
[61] C.A. Larsson, C.R. Rojas, and H. Hjalmarsson. MPC oriented
exper-iment design. In 18th IFAC World Congress, Milano, Italy,
2011. Toappear.
[62] S.L. Lauritzen. Graphical Models. Oxford Statistical
Science Series 17.Clarendon Press, 1996.
-
[63] E. L. Lehmann and G. Casella. Theory of Point Estimation.
JohnWiley & Sons, New York, second edition, 1998.
[64] K. Lindqvist. On experiment design in identification of
smooth linearsystems. Licentiate thesis, 2001.
[65] K. Lindqvist and H. Hjalmarsson. Optimal input design using
linearmatrix inequalities. In Proceedings of the 12th IFAC
Symposium onSystem Identification, 2000.
[66] K. Lindqvist and H. Hjalmarsson. Identification for
control: Adaptiveinput design using convex optimization. In
Conference on Decisionand Control, pages 4326–4331, Orlando,
Florida, USA, December 2001.IEEE.
[67] L. Ljung. A nonprobabilistic framework for signal spectra.
In Proc.24th IEEE Conf. on decision and Control, pages 1056–1060,
Fort Lau-dredale, Fla, 1985.
[68] L. Ljung and H. Hjalmarsson. Four encounters with system
identifica-tion. European Journal of Control, 17, 2011. Plenary
address. IEEEConference on Decision and Control/European Control
Conference.
[69] Z.-Q. Luo, M. Gatspar, J. Liu, and A. Swami, editors. IEEE
SignalProcessing Magazine: Special Issue on Distributed Signal
Processing inSensor Networks. IEEE, July 2006.
[70] D.J.C. Mackay. Bayesian non-linear modelling for the
prediction com-petition. ASHRAE Trans., 100(2):3704–3716, 1994.
[71] J.M. Maestre, P. Giselsson, and A. Rantzer. Distributed
receding hori-zon Kalman filter. In Proc. 49th IEEE Conference on
Decision andControl, Atlanta, GA, December 2010.
[72] J. Mårtensson and H. Hjalmarsson. A geometric approach to
varianceanalysis in system identification: Linear time-invariant
systems. In46th IEEE Conference on Decision and Control, pages
4269–4274, NewOrleans, USA, December 2007.
[73] J. Mårtensson and H. Hjalmarsson. How to make bias and
variance er-rors insensitive to system and model complexity in
identification. IEEETransactions on Automatic Control,
56(1):100–112, January 2011.
-
[74] J. Mårtensson, H. Jansson, and H. Hjalmarsson. Input design
foridentification of zeros. In 16th World Congress on Automatic
Control,Prague, Czech Republik, 2005. IFAC.
[75] J. Mårtensson, C.R. Rojas, and H. Hjalmarsson. Conditions
whenminimum variance control is the optimal experiment for
identifying aminimum variance controller. Automatica,
47(3):578–583, mar 2011.
[76] D. Materassi and G. Innocenti. Topological identification
in networksof dynamical systems. Automatic Control, IEEE
Transactions on,55(8):1860 –1871, aug. 2010.
[77] D. Materassi and M.V. Salapaka. On the problem of
reconstructingan unknown topology. In Proc. of IEEE American
Control Conference(ACC), 2010, pages 2113 –2118, jun. 2010.
[78] N. Meinshausen and P. Bühlmann. High-dimensional graphs and
vari-able selection with the lasso. Annals of Statistics,
34:1436–1462, 2006.
[79] J. Mårtensson and H. Hjalmarsson. Variance error
quantifications foridentified poles and zeros. Automatica,
45(11):2512–2525, Nov. 2009.
[80] D. Napoletani and T.D. Sauer. Reconstructing the topology
of sparselyconnected dynamical networks. Phys. Rev. E,
77(2):026103, Feb 2008.
[81] B. Ninness and S. Gibson. Quantifying the accuracy of
Hammersteinmodel estimation. Automatica, 38:2037–2051, 2002.
[82] J. L. Ny, E. Feron, and M. A. Dahleh. Scheduling
continuous-timekalman filters. IEEE Transactions on Automatic
Control, 56:1381–1394, Jun 2011.
[83] B. A. Ogunnaike. A contemporary industrial perspective on
processcontrol theory and practice. A. Rev. Control, 20:1–8,
1996.
[84] H. Ohlsson, F. Gustafsson, L. Ljung, and S. Boyd. State
smoothing bysum-of-norms regularization. In Proceedings of the 49th
IEEE Confer-ence on Decision and Control, Atlanta, USA, December
2010.
[85] H. Ohlsson, F. Gustafsson, L. Ljung, and S. Boyd.
Trajectory gen-eration using sum-of-norms regularization. In
Proceedings of the 49thIEEE Conference on Decision and Control,
Atlanta, USA, December2010.
-
[86] H. Ohlsson and L. Ljung. Piecewise affine system
identification usingsum-of-norms regularization. In Proceedings of
the 18th IFAC WorldCongress, Milano, Italy, 2011. Submitted.
[87] R. Olfati-Saber. Distributed kalman filtering for sensor
networks. InProc. 46th IEEE Conference on Decision and Control, New
Orleans,LA, December 2007.
[88] H. Papadopoulos, G. Wornell, and A. Oppenheim. Sequential
signalencoding from noisy measurements using quantizers with
dynamic biascontrol. IEEE Trans. Inf. Theory, 47(3):978–1002, Mar.
2001.
[89] G. Pillonetto, A. Chiuso, and G. De Nicolao. Prediction
error identifica-tion of linear systems: a nonparametric Gaussian
regression approach.Automatica, 45(2):291–305, 2011.
[90] G. Pillonetto and G. De Nicolao. A new kernel-based
approach forlinear system identification. Automatica, 46(1):81–93,
2010.
[91] L. Pronzato. Adaptive optimization and D-optimum
experimental de-sign. The Annals of Statistics, 28(6):1743–1761,
2000.
[92] L. Pronzato. Optimal experimental design and some related
controlproblems. Automatica, 44(2):303–325, February 2008.
[93] B. S. Rao and H. F. Durrant-Whyte. Fully decentralized
algorithmfor multisensor kalman filtering. IEE Proceedings-D,
138:413–420, Sep1991.
[94] A. Ribeiro and G. B. Giannakis. Bandwidth-constrained
distributedestimation for wireless sensor networks-part i: Gaussian
case. IEEETrans. Signal Proc., 54(3):1131–1143, Mar. 2006.
[95] C. R. Rojas, J. C. Agüero, J. S. Welsh, and G. C. Goodwin.
On theequivalence of least costly and traditional experiment design
for control.Automatica, 44(11):2706–2715, 2008.
[96] C. R. Rojas, H. Hjalmarsson, L. Gerenscér, and J.
Mårtensson. Anadaptive method for consistent estimation of
real-valued non-minimumzeros in stable lti systems. Automatica,
47(7):1388–1398, Jul 2011.
[97] C. R. Rojas, M. Barenthin Syberg, J. Welsh, and H.
Hjalmarsson.The cost of complexity in system identification: The
output error case.Automatica, 2011. To appear.
-
[98] C. R Rojas, J. S. Welsh, and J. C. Agüero. Fundamental
limitations onthe variance of parametric models. IEEE Transactions
on AutomaticControl, 2008. Submitted.
[99] C. R Rojas, J. S. Welsh, G. C. Goodwin, and A. Feuer.
Robust optimalexperiment design for system identification.
Automatica, 43(6):993–1008, June 2007.
[100] C.R. Rojas and H. Hjalmarsson. Sparse estimation based on
a valida-tion criterion. In Proceedings 49th IEEE Conference on
Decision andControl, Orlando, FA, USA, 2011. To appear.
[101] C.R. Rojas, H. Hjalmarsson, L. Gerencsér, and J.
Mårtensson. Consis-tent estimation of real NMP zeros in stable LTI
systems of arbitrarycomplexity. In 15th IFAC Symposium on System
Identification, pages922–927, Saint-Malo, France, July 2009.
[102] C.R. Rojas, M. Barenthin Syberg, J.S. Welsh, and H.
Hjalmarsson.The cost of complexity in system identification:
Frequency functionestimation of Finite Impulse Response systems.
IEEE Transactions onAutomatic Control, 55(10):2298–2309, 2010.
[103] S. I. Roumeliotis and G. A. Bekey. Distributed multirobot
localization.IEEE Transactions on Robotics and Automation,
18:781–795, Oct 2002.
[104] S. Roy and R. A. Iltis. Decentralized linear estimation in
correlatedmeasurement noise. IEEE Trans. Aerosp. and Electr. Syst.,
27(6):939–941, Nov. 1991.
[105] G. Schwarz. Estimating the dimension of a model. The
Annals ofStatistics, 6:461–464, 1978.
[106] J. Songsiri and L. Vandeberghe. Topology selection in
graphical modelsof autoregressive processes. Journal of Machine
Learning Research,11:2671–2705, 2010.
[107] K. Soummya and J. M. F. Moura. Gossip and distributed
kalmanfiltering: Weak consensus under weak detectability. IEEE
Transactionson Signal Processing, 59(4):1766–1784, Apr 2011.
[108] J. D. Stigter, D. Vries, and K. J. Keesman. On adaptive
optimal inputdesign: A bioreactor case study. AIChE Journal,
52(9):3290–3296,2006.
-
[109] J. Swevers and W. Verdonck J. De Schutter. Dynamic model
identifica-tion for industrial robots: Integrated experiment design
and parameterestimation. IEEE Control Systems Magazine,
27(5):58–71, 2007.
[110] A. Tang, L.L.H. Andrew, K. Jacobsson, K.H. Johansson, H.
Hjal-marsson, and S.H. Low. Queue dynamics with window flow
control.IEEE/ACM Transaction on Networking, 18(5):1422–1435, oct
2010.
[111] R Tibshirani. Regression shrinkage and selection via the
LASSO. Jour-nal of the Royal Statistical Society. Series B,
58(1):267–288, 1996.
[112] M. Timme. Revealing network connectivity from response
dynamics.Phys. Rev. Lett., 98(22):224101, 2007.
[113] M. Tipping. Sparse bayesian learning and the relevance
vector machine.Journal of Machine Learning Research, 1:211–244,
2001.
[114] J. N. Tsitsiklis, D. P. Bertsekas, and M. Athans.
Distributed asyn-chronous deterministic and stochastic gradient
optimization algo-rithms. IEEE Trans. Aut. Control, 31(9):803–812,
Sep. 1986.
[115] V. Ugrinovskii. Distributed robust filtering with H∞
consensus of es-timates. Automatica, 47(1):1–13, Jan 2011.
[116] B. Wahlberg, H. Hjalmarsson, and J. Mårtensson. Variance
results foridentification of cascade systems. Automatica,
45(6):1443–1448, 2009.
[117] J. Wang, W. X. Zheng, and T. Chen. Identification of
linear dy-namic systems operating in a networked environment.
Automatica,45(12):2763–2772, Dec. 2009.
[118] L. Y. Wang and G. G. Yin. Asymptotically efficient
parameter esti-mation using quantized output observations.
Automatica, 43(7):1178–1191, Jul. 2007.
[119] L. Y. Wang and G. G. Yin. Quantized identification with
dependentnoise and Fisher information ratio of communication
channels. IEEETrans. Aut. Control, 55(3):674–690, Mar. 2010.
[120] L. Y. Wang, G. G. Yin, J.-F. Zhang, and Y. Zhao. System
identificationwith quantized observations. Birkhäuser, Boston, USA,
2010.
[121] S. Weisberg. Applied Linear Regression. Wiley, New York,
1980.
-
[122] D. Willner, C. B. Chang, and K. P. Dunn. Kalman filter
algorithm fora multisensor system. In Proceedings of the 15th IEEE
Conference onDecision and Control, pages 570–574, Clearwater, FL,
December 1976.
[123] D.P. Wipf, B.D. Rao, and S. Nagarajan. Latent variable
Bayesian mod-els for promoting sparsity. IEEE Transactions on
Information Theory(to appear), 2011.
[124] J.-J. Xiao, A. Ribeiro, Z.-Q. Luo, and G.B. Giannakis.
Distributedcompression-estimation using wireless sensor networks.
IEEE SignalProcessing Magazine, 23(4):27–41, 2006.
[125] L. Xiao, S. Lall, and S. Boyd. A scheme for robust
distributed sensorfusion based on average consensus. In IPSN05
(International Confer-ence on Information Processing in Sensor
Networks), pages 63–70, LosAngeles, CA, April 2005.
[126] M. Yuan and Y. Lin. Model selection and estimation in
regression withgrouped variables. Journal of the Royal Statistical
Society, Series B,68:49–67, 2006.
[127] M. Yuan and Y. Lin. Model selection and estimation in
regression withgrouped variables. Journal of the Royal Statistical
Society, Series B,68:49–67, 2006.
[128] H. Zou and T. Hastie. Regularization and variable
selection via theelastic net. Journal of the Royal Statistical
Society, Series B, 67:301–320, 2005.