Embed Size (px)
Citation preview

1
Modeling
M. Sami FadaliProfessor of Electrical Engineering
University of Nevada
2
Transfer FunctionLTI System
a d cdt
a d cdt
a dcdt
a c
b d rdt
b d rdt
b drdt
b r
G sC sR s
b s b s b s ba s a s a s a
n
n
n n
n
n
m
m
m m
m
m
zero IC
mm
mm
nn
nn
1
1
1 1 0
1
1
1 1 0
11
1 0
11
1 0
Example
3
Response of LTI System• Convolution Theorem: = impulse response
L
• Impulse Input L
L
• The transfer function and the impulse response are Laplace transform pairs.
4
Example: Transfer Function of Point Massf t m x
F s m s X s
G s X sF s m s
( )
( ) ( )
( ) ( )( )
2
2
1
F s s
X sms s
x t tm
( )
( ) ( )
1
1 122
2
m
x
f

5
Analytical Modeling• Physical systems store and dissipate energy.• Lumped idealized elements: represent energy
dissipation and energy storage separately.• Physical elements may approximate the
behavior of the idealized elements. • Physical elements are not lumped. They
involve both energy dissipation and energy storage.
6
Relations
• Constitutive (elemental) Relations– Govern the behavior of the idealized elements.– Hold only approximately for physical elements.
• Connective Relations– Govern connections of elements.– Often derived from conservation laws.
7
Electrical Systems
• Ideal R: energy dissipation.• Ideal L: magnetic energy storage.• Ideal C: electrostatic energy storage.• Connective Relations: Kirchhoff’s Laws
– Current Law: conservation of charge– Voltage Law: conservation of energy
Constitutive Relations for R, L, C
8
Table 2.3Impedance Admittance

9
Mesh Analysis1. Replace passive elements with Z(s).2. Define clockwise current for each mesh.3. Write KVL in matrix form with source
voltages that drive clockwise current positive.
4.Use Cramer’s rule to solve for the transfer function.
Cramer’s Rule
• Provided that a solution exists
10
2221
1211
221
111
2
2221
1211
222
121
1 ,
aaaababa
x
aaaaabab
x
2
1
2
1
2221
1211
bb
xx
aaaa
211222112221
1211 aaaaaaaa
11
Example: Mesh Analysis
)()(
0)(
)()(
1111
)()()(
23
2
1
23
1
sIRsV
sVsIsI
sCsLRsCsCsCZ
sss
o
i
i
VIZ
211
112
2111
RRsLRsLR
RRsLZ
i C+
12
2231
3
23
111
)()(
sCsCsLRsCZsCR
VsIR
VVsG
ii
o
Cramer’s Rule
I s
Z sC VsC
Z sC sCsC R L s sC
i
2
1
1
3 2
11 0
1 11 1
( )
i

13
Node Analysis1.Replace passive elements with Y(s).2. For each node, define a node voltage relative
to a reference node.3. Write KCL in matrix form with source
currents that drive current into a node positive.
4.Solve for the transfer function using Cramer’s rule.
14
Example: Node Analysis
Change voltage source to
current source.
R1
L2 L1
Rs
Vs/Rs
R2 R3
15
Y V I( ) ( ) ( )s s s
00)(
)()()(
11
1111
11
231
21
2212
1
111
1
ss
c
b
a
sGsV
sVsVsV
sLGG
sLG
sLsLsLG
sL
GsLsL
GG
Node Equations
co VVRG ,/1 L2
Vo
R1
L1
Rs R2
Vs/Rs
R3 Vb
Va
16
G s VV
V
G GsL sL
VR
sLG
sL sL
GsL
G GsL sL
G
sLG
sL sL sL
GsL
G GsL
o
s
s
ss
s
s
( )
1
1 1
1 1 1 0
1 0
1 1
1 1 1 1
1 1
11 1
12
1 2
12
11 1
1
12
1 2 2
12
1 32

17
Translational Mechanical Systems
• Ideal Damper b: energy dissipation.• Ideal Spring k: potential energy storage.• Pure Mass m: kinetic energy storage.• Connective Relations: Newton’s 2nd Law
18
a) Ideal Spring
• Elastic energy (neglect plastic deformation)• Linear element: force proportional to the
deformation .• No energy dissipation• No mass
k
x2x1
f
19
b) Ideal Viscous Damper
• Energy dissipation• No mass• No elastic deformation• Linear element: force proportional to rate of
deformation .
bx1 x2
f
20
c) Point Mass
•Perfectly rigid
•No dissipation
•Linear element
mf
x

Constitutive Relations for Spring, Mass, Damper
21 22
Ex. Mass-Spring-Damper
fkxxbxmxbxkf
fffxm ds
G sX sF s ms bs k
1
2
x
b k
f(t)
m
23
Example 2.11
m x b x b x x k x k x x f
m x b x b x x k x k x x
1 1 1 1 3 1 2 1 1 2 1 2
2 2 2 2 3 2 1 3 2 2 2 1 0
m s b b s k k b s kb s k m s b b s k k
XX
F12
1 3 1 2 3 2
3 2 22
2 3 2 3
1
2 0
24
Transfer Function (Cramer’s Rule)
3232
2223
2321312
1
23
21312
1
2
01
kksbbsmksbksbkksbbsm
ksbFkksbbsm
F
FXsG
22332322
221312
1
23
ksbkksbbsmkksbbsmksb

3-D.O.F. Translational Mechanical System
25
Three equations of motion.
Rotational Mechanical Systems
26
27
Example 2.19
211111 KDJ
02
1
22
2
12
1
KsDsJKKKsDsJ
0122222 KDJ
28
Transfer Function (Cramer’s Rule)
KsDsJKKKsDsJ
KKsDsJ
sG
22
2
12
1
12
1
2 01
)(
22
221
21 KKsDsJKsDsJ
K

29
Example 2.20
00
3323233
1232222
211111
DDJKDJKDJ
J s Ds K KK J s D s K D s
D s J s D D s
12
1
22
2 2
2 32
2 3
1
2
3
0
000
30
Gears
Assume:1- No losses. 2- No inertia. 3- Perfectly rigid.Single velocity at point of contact Equal arc length
1 1
2 2
N1
N2
J
Energy Balance• Assume no losses
• Trade speed for torque
N2 > N1 : output side slower but delivers more torque
N2 < N1 : output side faster but delivers less torque
31 32
Energy Storage• Translation
• Mass
• Spring
• Rotation
• Inertia
• Spring

Energy Dissipation
• Power dissipated• Translation
• Rotation
33 34
Equivalent Inertia
Equivalent to inertia on
output side
2
2
12
1
2
2
1
222
211 2
121
NN
JJ
JJE
1 , 1
2 , 2
N1
N2
J
2
sourceofteethno.ndestinatioofteethno.
JJe
2
2
121
NNJJJe
35
Effect of Loading Output Side on Input Side
Inertia
2
2
2
1
1
1
12
11
1
2
22
sourceofteethno.ndestinatioofteethno.
J
NNJJ
NNJ
NN
J
e
1 , 1
2 , 2
N 1
N 2
J
1 , 1
2 , 2
1
236
Damper22
2
1
1
1
sourceofteethno.ndestinatioofteethno.
DNNDDe
22
2
1
1
1
sourceofteethno.ndestinatioofteethno.
KNNKKe
Damper and Spring
Spring

37
Example (Special Case)
)()()( 11
222
2 sTNNsTsKsDsJ ee
38
Example
,m Db
JL
2 L
K
N1
N2 DL
Jg Jb
• Two equations of motion.• Cannot simply add all rotational masses!
SolutionRedraw the schematic with (i) added “e” for elements (and variables) moved, and (ii) gears removed.
39
e,me Dbe
JL
2 L
K DL
Jbe Jge
40
Gear Train
12
12
12
1
22
32
4
3
2
1
12
3
1
2
1
1
KnKBnBJnJn
nNN
NN
NN
elelel
e
l
e
l
l
l
ll
2
l
N3
N2
N1
N4
1
3 l-1

41
TFs of Electromechanical Systems• Electrical Subsystem
– Varies with motor type– armature (rotor) conductors current – field (stator) conductors or permanent magnet
• Mechanical Subsystem– Varies with load.– Write equations of motion.
DC Motor
DC motor.
42
National Instruments:http://zone.ni.com/devzone/cda/ph/p/id/52
DC motor armature (rotor)
Torque Equation• Magnetic flux Wb• Force
= conductor length= magnetic flux density = armature (rotor) current
Control• Vary torque by changing or
43
f
r
44
Field Control• Changing and fixing • Back EMF (Faraday’s Law)• Voltage induced in moving coil proportional to the
rate of cutting of lines of magnetic flux.
is only approximately constant through the use of high resistance (inefficient)

45
Armature Control• Changing and fixing
• Used in practice.
• KVL
ea vb
Za
46
Schematic
1
ea
J1, D1 J2
D2
2 L
vb
N1
K
Za
N2
47
Mechanical SubsystemEquations of motion for rotational system
01
''2
'2
'11111
LeLeLe
atLe
KDJiKKDJ
, 1
J2e
D2e
L
D1
Ke J1
48
00
0
0'1
22
2
12
1
a
a
L
eeee
tee
aab E
IKsDsJKKKKsDsJ
RsLsK
Matrix Form
01
''2
'2
'11111
LeLeLe
atLe
KDJiKKDJ

49
Transfer Function
0
000
01
)(
22
2
12
1
12
121
21'
eeee
tee
aab
e
te
aaab
a
a
L
a
L
KsDsJKKKKsDsJ
RsLsKK
KKsDsJRsLEsK
ENN
ENN
EsG
eeebteeeeeaa
te
KsDsJsKKKKsDsJKsDsJRsLKKNN
22
22
22
212
1
21
50
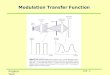
Evaluation of Motor ParametersDynamometer measure speed & torque for constant Dynamometer Test gives speed-torque curvesAssume supplied by manufacturer
0 10 20 30 40 500
100
200
300
400
500
Speed (rad/s)
Torq
ue (N
-m) ea= 100 V
=stall torque=no-load speed
51
Solve for Parameters
• Stall torque:
• No-load speed:
ea vb
Ra
Transfer Function
52
T, m
JLe
DLe
Da Ja
batee
at
a
m
a
mbatatmee
KRKDsJRK
sEssG
RsKsEKsIKsDsJ
)()()(
)()()()(
Leae
Leae
DDDJJJ

53
Linearity(i) Homogeneity
(ii) Additivity
• Affine
Nonlinearities
54
55
Linearization1st order approximation (in the vicinity of )
for small 0 2 4 6 8
0
20
40
60
80
56
Equilibrium Point• System at an equilibrium stays there unless perturbed.
• Set all derivatives equal to zero for equilibrium.
= value of forcing function at equilibrium
• Cancel constants and

57
In the Vicinity of the Equilibrium
Special case: nonlinearity in output only
nidt
cddt
cdSimilarlydtdc
dtccd
dtcd
i
i
i
i
,,2,1,0
rrrcfcfdt
cdadt
cdadt
cdn
n
nn
n
0011
1
1 )()(
1st order approximation
rcdcdf
dtcda
dtcda
dtcd
cn
n
nn
n
0
11
1
1
Linearized Differential Equation
58
d cdt
a d cdt
a d cdt
a c r a dfdc
n
n n
n
nc
1
1
1 1 0 00
,
G s CR s a s a s a s an
nn
nn( )
1
11
22
1 0
Linear: can Laplace transform to get the TF
59
Procedure
1. Determine the equilibrium point(s).2. Find the first order approximation of all
nonlinear functions.3. Rewrite the system differential equation in
terms of perturbations canceling the constants using Step 1.
60
Example: Pendulum
Moment of inertia
Equation of Motion
• Linearize about = 30o
• Equilibrium at = 30o sin( )

61
Linearization• Using Trigonometric Identity
sin sin sin sin cos
30 30 3030
o o o
o
dd
sin1cos2321
sin30coscos30sin30sin ooo
• Using 1st order approximation formula
23
2321 0
mglBJmglBJ
62
Potentiometer
• 10 turns• 1 turn = 2 rad• 20 V• Pot Gain = 20/(10 X 2 )
= (1/ ) V/rad
63
Fluid SystemsLinearized Modelh = R qConservation of Mass
qi
qo
h
H
inin
oin
Rqhdtdh
Rhq
dtdhC
AreaC
qQqQdt
dCh
1)()(
sR
sqsh
in