Embed Size (px)
Citation preview
IntroductionFirst-order linear systems
Second-order linear systemsTransfer Function
Applications, conclusion and future workReferences
Second order systems
Filippo Sanfilippo
1
1Department of Engineering Cybernetics, Norwegian University of Science and Technology, 7491 Trondheim, Norway,[email protected]
Trial lecture at the Department of Electrical Engineering and Computer Science,University of Stavanger, Norway, 2017
Filippo Sanfilippo Second order systems
IntroductionFirst-order linear systems
Second-order linear systemsTransfer Function
Applications, conclusion and future workReferences
Introduction
About Me
Education:
PhD in Engineering Cybernetics,Norwegian University of Science andTechnology (NTNU), Norway
MSc in Computer Science Engineering,University of Siena, Italy
BSc degree in Computer ScienceEngineering, University of Catania, Italy
Mobility:
Visiting Fellow, Technical Aspects ofMultimodal Systems (TAMS),Department of Mathematics,Informatics and Natural Sciences,University of Hamburg, Hamburg,Germany
Visiting Student, School of Computingand Intelligent Systems, University ofUlster, Londonderry, United Kingdom
Granted with an Erasmus+ Sta↵Mobility for Teaching and Trainingproject
Activities:
Membership Development O�cer for the IEEENorway Section
Filippo Sanfilippo Second order systems
IntroductionFirst-order linear systems
Second-order linear systemsTransfer Function
Applications, conclusion and future workReferences
Introduction
Research topics
Visualisation/Game Development Micro-controllers, IoT, Maker Tech.
Education
Augmented Reality/Virtual Reality
Mobile Device Software/Hardware Codesign
Real-time Systems
Artificial IntelligenceSafety-Critical Systems
Filippo Sanfilippo Second order systems
IntroductionFirst-order linear systems
Second-order linear systemsTransfer Function
Applications, conclusion and future workReferences
Introduction
About Me
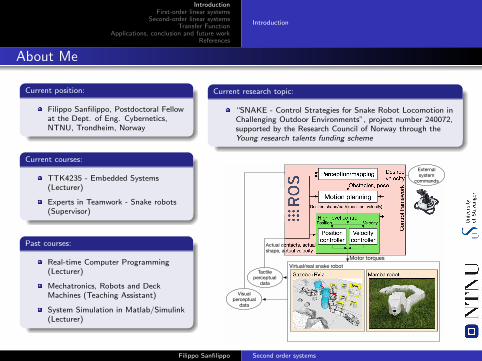
Current position:
Filippo Sanfilippo, Postdoctoral Fellowat the Dept. of Eng. Cybernetics,NTNU, Trondheim, Norway
Current courses:
TTK4235 - Embedded Systems(Lecturer)
Experts in Teamwork - Snake robots(Supervisor)
Past courses:
Real-time Computer Programming(Lecturer)
Mechatronics, Robots and DeckMachines (Teaching Assistant)
System Simulation in Matlab/Simulink(Lecturer)
Current research topic:
“SNAKE - Control Strategies for Snake Robot Locomotion inChallenging Outdoor Environments”, project number 240072,supported by the Research Council of Norway through theYoung research talents funding scheme
Virtual/real snake robotMamba robot
High-level control
Gazebo+RViz
External system
commandsPerception/mapping
Motion planning
Position controller
Obstacles, pose
Motor torques
Actual contacts, actual shape, actual velocity
Desired velocity
Desired shape/path (position, velocity)
Visual perceptual
data
Tactile perceptual
data
Cont
rol f
ram
ewor
k
Velocity controller
Position Velocity
Filippo Sanfilippo Second order systems
IntroductionFirst-order linear systems
Second-order linear systemsTransfer Function
Applications, conclusion and future workReferences
First-order linear systems
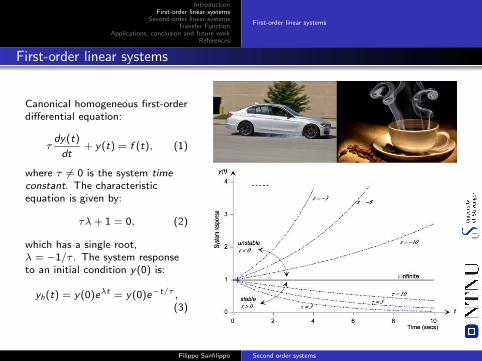
First-order linear systems
Canonical homogeneous first-orderdi↵erential equation:
⌧dy(t)
dt+ y(t) = f (t), (1)
where ⌧ 6= 0 is the system timeconstant. The characteristicequation is given by:
⌧�+ 1 = 0, (2)
which has a single root,� = �1/⌧ . The system responseto an initial condition y(0) is:
yh(t) = y(0)e�t = y(0)e�t/⌧ ,(3)
Filippo Sanfilippo Second order systems

IntroductionFirst-order linear systems
Second-order linear systemsTransfer Function
Applications, conclusion and future workReferences
First-order linear systems
First-order linear systems: s-plane
Filippo Sanfilippo Second order systems
IntroductionFirst-order linear systems
Second-order linear systemsTransfer Function
Applications, conclusion and future workReferences
First-order linear systems
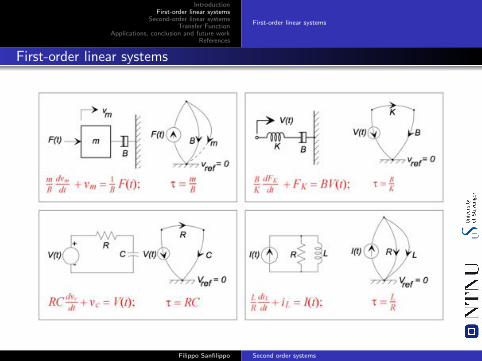
First-order linear systems
Filippo Sanfilippo Second order systems
IntroductionFirst-order linear systems
Second-order linear systemsTransfer Function
Applications, conclusion and future workReferences
First-order linear systems
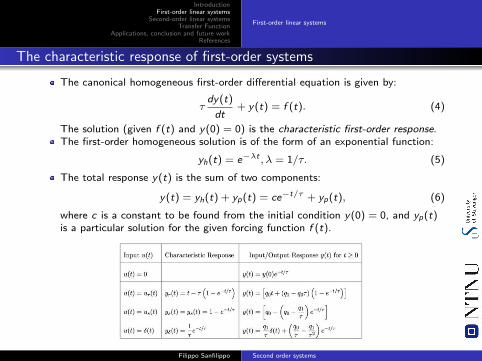
The characteristic response of first-order systems
The canonical homogeneous first-order di↵erential equation is given by:
⌧dy(t)
dt+ y(t) = f (t). (4)
The solution (given f (t) and y(0) = 0) is the characteristic first-order response.The first-order homogeneous solution is of the form of an exponential function:
yh(t) = e��t ,� = 1/⌧. (5)
The total response y(t) is the sum of two components:
y(t) = yh(t) + yp(t) = ce�t/⌧ + yp(t), (6)
where c is a constant to be found from the initial condition y(0) = 0, and yp(t)is a particular solution for the given forcing function f (t).
Filippo Sanfilippo Second order systems
IntroductionFirst-order linear systems
Second-order linear systemsTransfer Function
Applications, conclusion and future workReferences
Second-order linear systemsStandard terms and pole locationsSignificant cases
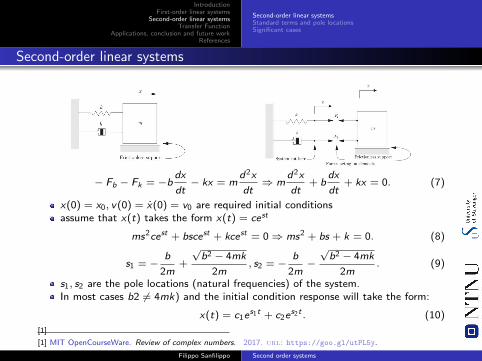
Second-order linear systems
� Fb � Fk = �bdx
dt� kx = m
d2x
dt) m
d2x
dt+ b
dx
dt+ kx = 0. (7)
x(0) = x0, v(0) = x(0) = v0 are required initial conditionsassume that x(t) takes the form x(t) = cest
ms2cest + bscest + kcest = 0 ) ms2 + bs + k = 0. (8)
s1 = �b
2m+
pb2 � 4mk
2m, s2 = �
b
2m�
pb2 � 4mk
2m. (9)
s1, s2 are the pole locations (natural frequencies) of the system.In most cases b2 6= 4mk) and the initial condition response will take the form:
x(t) = c1es1t + c2e
s2t . (10)
[1]
[1] MIT OpenCourseWare. Review of complex numbers. 2017. url: https://goo.gl/utPL5y.
Filippo Sanfilippo Second order systems
IntroductionFirst-order linear systems
Second-order linear systemsTransfer Function
Applications, conclusion and future workReferences
Second-order linear systemsStandard terms and pole locationsSignificant cases
Standard terms
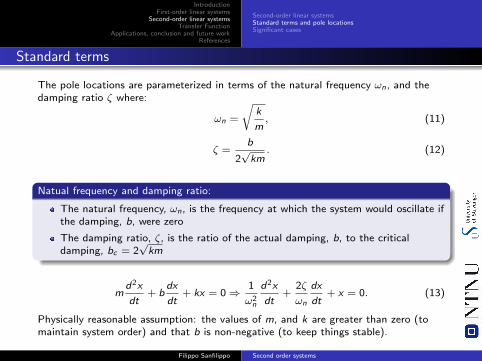
The pole locations are parameterized in terms of the natural frequency !n, and thedamping ratio ⇣ where:
!n =
rk
m, (11)
⇣ =b
2pkm
. (12)
Natual frequency and damping ratio:
The natural frequency, !n, is the frequency at which the system would oscillate ifthe damping, b, were zero
The damping ratio, ⇣, is the ratio of the actual damping, b, to the criticaldamping, bc = 2
pkm
md2x
dt+ b
dx
dt+ kx = 0 )
1
!2n
d2x
dt+
2⇣
!n
dx
dt+ x = 0. (13)
Physically reasonable assumption: the values of m, and k are greater than zero (tomaintain system order) and that b is non-negative (to keep things stable).
Filippo Sanfilippo Second order systems
IntroductionFirst-order linear systems
Second-order linear systemsTransfer Function
Applications, conclusion and future workReferences
Second-order linear systemsStandard terms and pole locationsSignificant cases
Pole locations
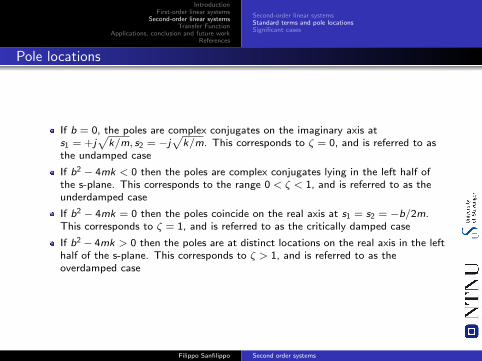
If b = 0, the poles are complex conjugates on the imaginary axis ats1 = +j
pk/m, s2 = �j
pk/m. This corresponds to ⇣ = 0, and is referred to as
the undamped case
If b2 � 4mk < 0 then the poles are complex conjugates lying in the left half ofthe s-plane. This corresponds to the range 0 < ⇣ < 1, and is referred to as theunderdamped case
If b2 � 4mk = 0 then the poles coincide on the real axis at s1 = s2 = �b/2m.This corresponds to ⇣ = 1, and is referred to as the critically damped case
If b2 � 4mk > 0 then the poles are at distinct locations on the real axis in the lefthalf of the s-plane. This corresponds to ⇣ > 1, and is referred to as theoverdamped case
Filippo Sanfilippo Second order systems
IntroductionFirst-order linear systems
Second-order linear systemsTransfer Function
Applications, conclusion and future workReferences
Second-order linear systemsStandard terms and pole locationsSignificant cases
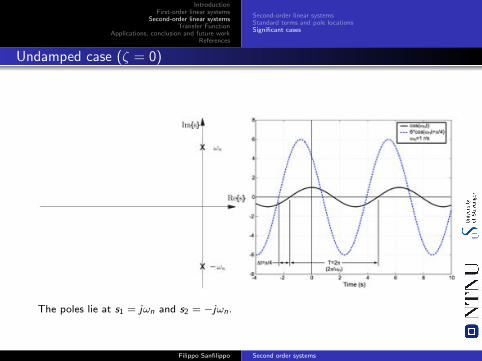
Undamped case (⇣ = 0)
The poles lie at s1 = j!n and s2 = �j!n.
Filippo Sanfilippo Second order systems
IntroductionFirst-order linear systems
Second-order linear systemsTransfer Function
Applications, conclusion and future workReferences
Second-order linear systemsStandard terms and pole locationsSignificant cases
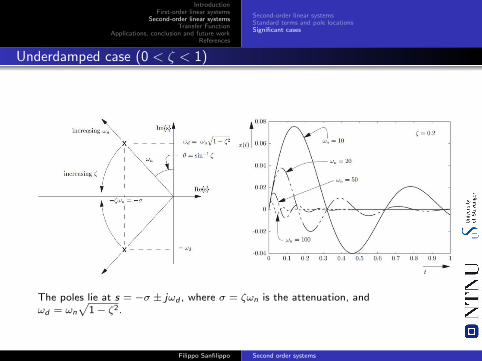
Underdamped case (0 < ⇣ < 1)
The poles lie at s = �� ± j!d , where � = ⇣!n is the attenuation, and!d = !n
p1� ⇣2.
Filippo Sanfilippo Second order systems
IntroductionFirst-order linear systems
Second-order linear systemsTransfer Function
Applications, conclusion and future workReferences
Second-order linear systemsStandard terms and pole locationsSignificant cases
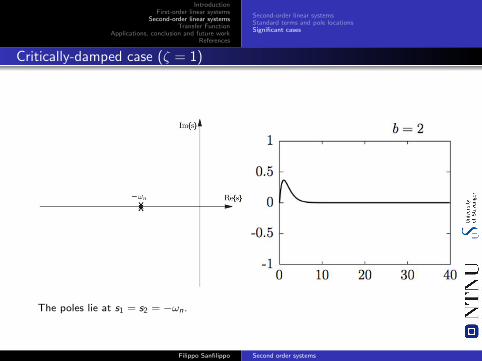
Critically-damped case (⇣ = 1)
The poles lie at s1 = s2 = �!n.
Filippo Sanfilippo Second order systems
IntroductionFirst-order linear systems
Second-order linear systemsTransfer Function
Applications, conclusion and future workReferences
Second-order linear systemsStandard terms and pole locationsSignificant cases
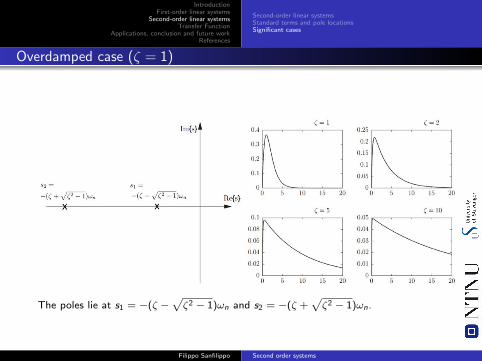
Overdamped case (⇣ = 1)
The poles lie at s1 = �(⇣ �p
⇣2 � 1)!n and s2 = �(⇣ +p
⇣2 � 1)!n.
Filippo Sanfilippo Second order systems
IntroductionFirst-order linear systems
Second-order linear systemsTransfer Function
Applications, conclusion and future workReferences
Transfer FunctionMass-spring-damper systemMass-Spring-Damper in Simulink
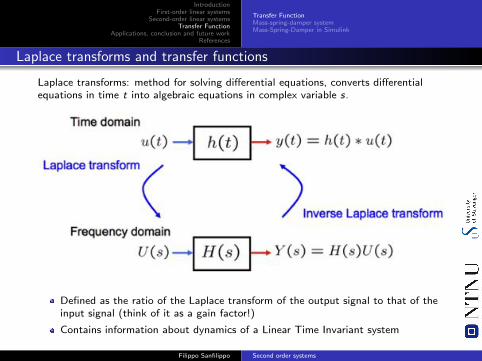
Laplace transforms and transfer functions
Laplace transforms: method for solving di↵erential equations, converts di↵erentialequations in time t into algebraic equations in complex variable s.
Defined as the ratio of the Laplace transform of the output signal to that of theinput signal (think of it as a gain factor!)
Contains information about dynamics of a Linear Time Invariant system
Filippo Sanfilippo Second order systems
IntroductionFirst-order linear systems
Second-order linear systemsTransfer Function
Applications, conclusion and future workReferences
Transfer FunctionMass-spring-damper systemMass-Spring-Damper in Simulink
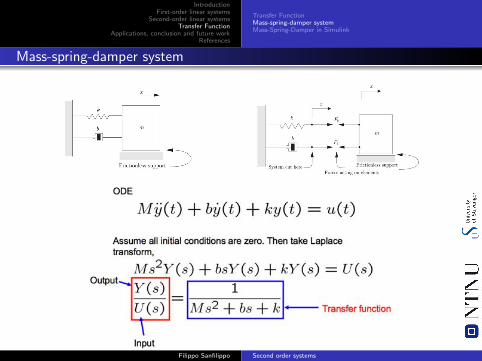
Mass-spring-damper system
Filippo Sanfilippo Second order systems
IntroductionFirst-order linear systems
Second-order linear systemsTransfer Function
Applications, conclusion and future workReferences
Transfer FunctionMass-spring-damper systemMass-Spring-Damper in Simulink
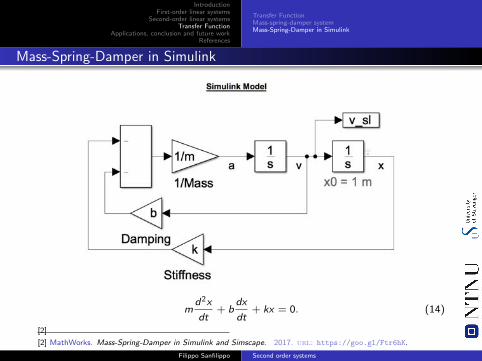
Mass-Spring-Damper in Simulink
md2x
dt+ b
dx
dt+ kx = 0. (14)
[2]
[2] MathWorks. Mass-Spring-Damper in Simulink and Simscape. 2017. url: https://goo.gl/Ftr6hK.
Filippo Sanfilippo Second order systems
IntroductionFirst-order linear systems
Second-order linear systemsTransfer Function
Applications, conclusion and future workReferences
ApplicationsConclusion and future work
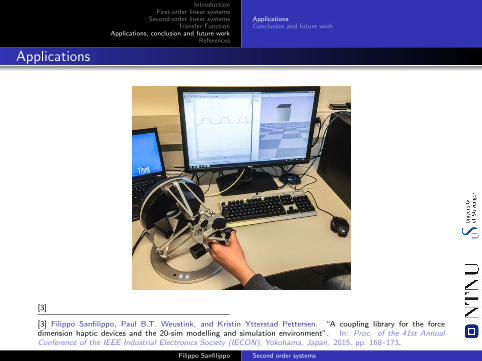
Applications
[3]
[3] Filippo Sanfilippo, Paul B.T. Weustink, and Kristin Ytterstad Pettersen. “A coupling library for the forcedimension haptic devices and the 20-sim modelling and simulation environment”. In: Proc. of the 41st AnnualConference of the IEEE Industrial Electronics Society (IECON), Yokohama, Japan. 2015, pp. 168–173.
Filippo Sanfilippo Second order systems
IntroductionFirst-order linear systems
Second-order linear systemsTransfer Function
Applications, conclusion and future workReferences
ApplicationsConclusion and future work
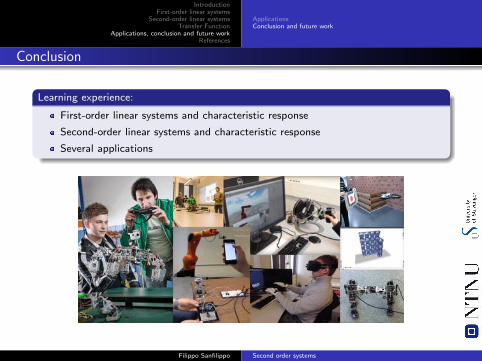
Conclusion
Learning experience:
First-order linear systems and characteristic response
Second-order linear systems and characteristic response
Several applications
Filippo Sanfilippo Second order systems

IntroductionFirst-order linear systems
Second-order linear systemsTransfer Function
Applications, conclusion and future workReferences
ApplicationsConclusion and future work
Thank you for your attention
Contact:
F. Sanfilippo, Department of Engineering Cybernetics, Norwegian University ofScience and Technology, 7491 Trondheim, Norway, [email protected]
[4–6]
[4] Filippo Sanfilippo et al. “Virtual functional segmentation of snake robots for perception-driven obstacle-aidedlocomotion”. In: Proc. of the IEEE Conference on Robotics and Biomimetics (ROBIO), Qingdao, China. 2016,pp. 1845–1851.
[5] Filippo Sanfilippo et al. “A review on perception-driven obstacle-aided locomotion for snake robots”. In: Proc.of the 14th International Conference on Control, Automation, Robotics and Vision (ICARCV), Phuket, Thailand.2016, pp. 1–7.
[6] Filippo Sanfilippo et al. “Perception-driven obstacle-aided locomotion for snake robots: the state of the art,challenges and possibilities”. In: Applied Sciences 7.4 (2017), p. 336.
Filippo Sanfilippo Second order systems

IntroductionFirst-order linear systems
Second-order linear systemsTransfer Function
Applications, conclusion and future workReferences
References
[1] MIT OpenCourseWare. Review of complex numbers. 2017. url:https://goo.gl/utPL5y.
[2] MathWorks. Mass-Spring-Damper in Simulink and Simscape. 2017. url:https://goo.gl/Ftr6hK.
[3] Filippo Sanfilippo, Paul B.T. Weustink, and Kristin Ytterstad Pettersen. “Acoupling library for the force dimension haptic devices and the 20-sim modellingand simulation environment”. In: Proc. of the 41st Annual Conference of theIEEE Industrial Electronics Society (IECON), Yokohama, Japan. 2015,pp. 168–173.
[4] Filippo Sanfilippo et al. “Virtual functional segmentation of snake robots forperception-driven obstacle-aided locomotion”. In: Proc. of the IEEE Conferenceon Robotics and Biomimetics (ROBIO), Qingdao, China. 2016, pp. 1845–1851.
[5] Filippo Sanfilippo et al. “A review on perception-driven obstacle-aided locomotionfor snake robots”. In: Proc. of the 14th International Conference on Control,Automation, Robotics and Vision (ICARCV), Phuket, Thailand. 2016, pp. 1–7.
[6] Filippo Sanfilippo et al. “Perception-driven obstacle-aided locomotion for snakerobots: the state of the art, challenges and possibilities”. In: Applied Sciences7.4 (2017), p. 336.
Filippo Sanfilippo Second order systems










![Transfer Function [Control Engg]](https://img.pdfslide.us/doc/110x75/577d39bf1a28ab3a6b9a75ca/transfer-function-control-engg.jpg)


![Matlab 7, Function References [2007]](https://img.pdfslide.us/doc/110x75/5587377dd8b42a27238b4615/matlab-7-function-references-2007.jpg)













