-
Duarte Dias Fabio Stradelli
Zeynab Talebpour
Distributed Intelligent Systems
Multi-level modeling of a distributed robotic system
-
Outline Motivation
System modeling
Experiments and results
Conclusions
2
-
Why Modeling
Simplified System Descriptions
Faster and more straightforward analyses
Additional tools for design and optimization
3
-
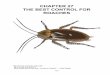
Why Modeling
Cockroaches motion pattern
Nshelter1(t)
Nshelter2(t)
shelter 1
shelter 2 Average population numbers in shelters
16 cockroaches with no robots
12 cockroaches + 4 robots
real model
Same shelter type
4
Halloy et. al. (2007) LEURRE project
-
5
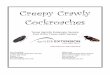
darker and ligher shelters
16 cockroaches with no robots
12 cockroaches + 4 robots
Why Modeling
Cockroaches motion pattern
Nlighter(t)
Ndarker(t)
lighter shelter
darker shelter Average population numbers in shelters Halloy et.
al. (2007)
LEURRE project
model real
-
Multi Level Modeling Sub-microscopic model
Detailed representation of the physical environment and the
robots ‒ Include inter-robot interactions
Microscopic model Multi-agent model Relevant robots features
only
Macroscopic model Average representation of the whole swarm
Mathematical model (ODE)
Definition of model structure
Faithfulness
Tractability
Abstraction
6
-
Sub-microscopic model: α-Algorithm • Task: Each robot must
maintain a minimum of α connections
• Colision avoidance: ‒ Detected using threshold on
proximity sensor intensity ‒ uses braintenberg controller ‒
Lasts a period of Ta steps
• Connectivity check Robot counts neighbors (r < Rw) every
Tc steps (di): ‒ di ≥ α : ‒ di < α : (U-turn) ‒ If di doesn’t
decrease untill next period resume forward motion with a random
turn ‒ Otherwise repeat U-turn maneuver
Winfield et. al. (2008)
7
-
Microscopic model: PFSM
Pl,i : probability to get from Fi to a state with less
neighbours Pg,i : probability to get from Fi to a state with more
neighbours Pla,i: probability to get from Ci to a state with less
neighbours Pr,i : probability to recover from Ci to Fi+1 Pf,i :
probability to get from Ci to forward Fi Invalid transitions
8
-
Microscopic model: PFSM
Forward and coherence states are independent of avoidance
Build a sub-PFSM to model avoidance for both Pl,i : probability
to enter avoidance from state Fi
9
-
Probabilities Estimation
10
-
Macroscopic Model Target: describe how many robots are in a
given state at time step k Example of DE (Forward)
• Example of DE (Avoidance substate)
11
-
Steady state and validation
Evaluation time: 15mins Plot the submicroscopic
steady state against the model steady state
Submicroscopic steady state computed using an average
window
12
Sample plot for validation
-
Experiment Setup
13
40 robots Unbounded environemnt Parameters adjusted to the
e-puck dimensions:
Communiction range Rw = 0.5m Speed V = 6 cm /s Tc = 5 and Ta
=2 (small):
Less invalid states Not to go outside the communication
range
α parameter: 5, 10, 15 Algorithm is not as effective for the
values close to the bounds
-
TC = 5 TA = 2
RW = 0.5
14
-
Findings Good prediction of the system Lost robots
Depends on parameters: Example: Large Tc and small Rw lost
connections between
connectivity updates
Tc and Rw must be correctly chosen
15
-
16
-
17
-
Conclusion
18
Model closely follows submicroscopic model A correct choice
of the parameters is needed for more
effective model Simplifying assumptions lead to some
innacuracies
-
Microscopic Model
Define states of the problem Fi: forward with i neighbours,
i=0,…,Nrobots-1 Ci: coherence with j neighbours, j=0,…,alpha FiA
, CiA: forward/coherence with avoidance
Build a Probabilistic Finite State Machine Estimate transition
probabilities from the
submicroscopic model
20
-
Probability computation
21
-
Multi Level Modeling Sub-microscopic model – faithful
representation of the physical
environment and the robots (detailed description)
Microscopic model – relevant robot features captured through a
multi-agent model (here we define the structure and the
probabilities)
Macroscopic model – average representation of the whole swarm,
mathematical model (ODE)
To represent explicitly different design choices, trade off
computational speed and faithfulness to reality, bridge
mathematically tractable models and reality in na incremental
way
22
-
Multi Level Modeling
Trade off computational speed and faithfulness to reality
bridge mathematically tractable models and reality in an
incremental way
23
-
Results
24
Evaluate the steady state Run the model for a long time
Compare with simulation to validate the model Investigate the
effect of different parameters
-
Probabilities Estimation
Average transitions over time for each robot: pi Sum over
time the number of corresponding transitions
between states for each robot: Sumi Divide by total number of
time steps robot i was in the required
starting state (Ti ): pi = Sumi / Ti
Final probability : p Average pi’s Sum pi over robots: Sum
Divide by Nrobots: p = Sum / Nrobots
25
-
Macroscopic Model
Target: describe how many robots are in a given state at time
step k
Build a system of DE’s (Markov chain) Exploit conservation
laws Use probabilities for transitions
26
-
Probabilities Estimation
27
-
28
darker and ligher shelters
16 cockroaches with no robots
12 cockroaches + 4 robots
Why Modeling
Cockroaches motion pattern
Nlighter(t)
Ndarker(t)
lighter shelter
darker shelter Average population numbers in shelters Halloy et.
al. (2007)
LEURRE project
model real