Embed Size (px)
Citation preview
1
Motion Perception 1
PSY305 Lecture 12 JV Stone
2
Structure• Human visual system as a band-pass filter.• Neuronal motion detection, the Reichardt
detector.• The aperture problem.

3
Motion not visible(too fast)
Motion not visible(too slow)
Visible motion
The visual system is a temporalband-pass filter
bullet
4
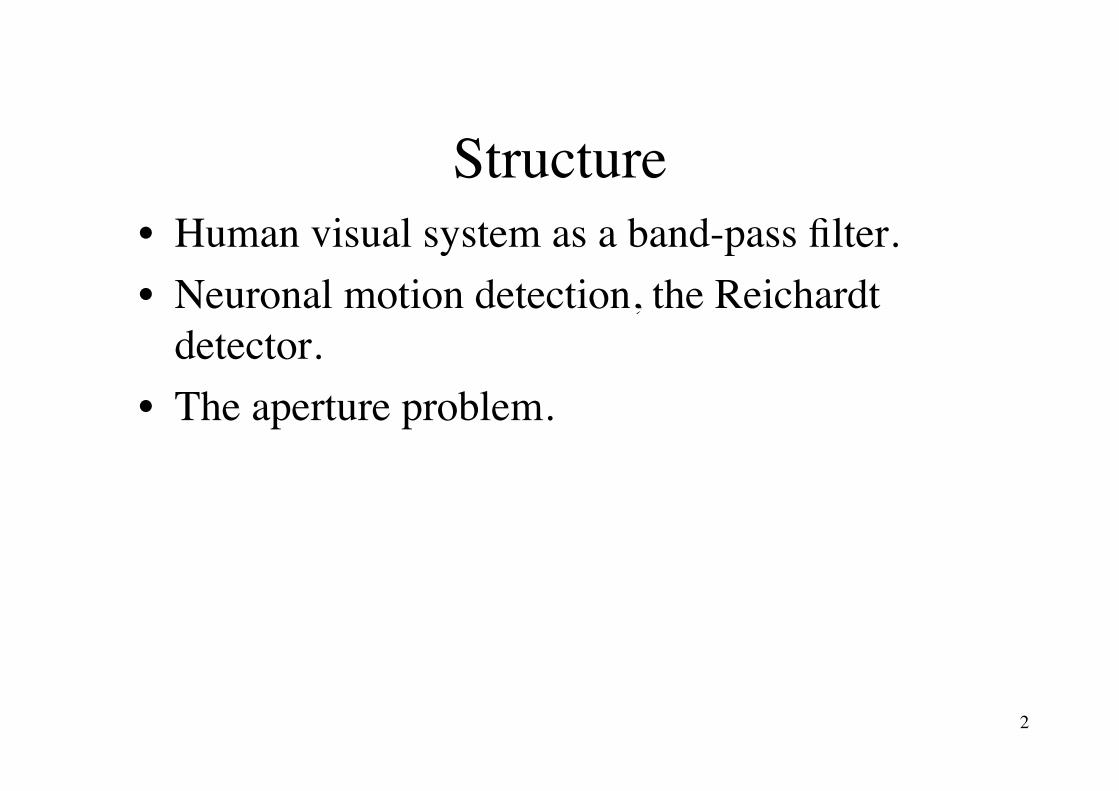
Temporal contrast sensitivity function
Time
t
Temporal flicker frequency = 1/t Hertz (Hz).Eg If the black-white-black cycle repeats 10 times each second then the disc has a temporal frequencyof 10Hz. Experimenter adjusts contrast between black and white discs to determine contrast sensitivityat each teporal frequency. For humans, minimal contrast for motion detection required at about 10-20Hz. Note log scale.
Refresh rate of computer screen
5
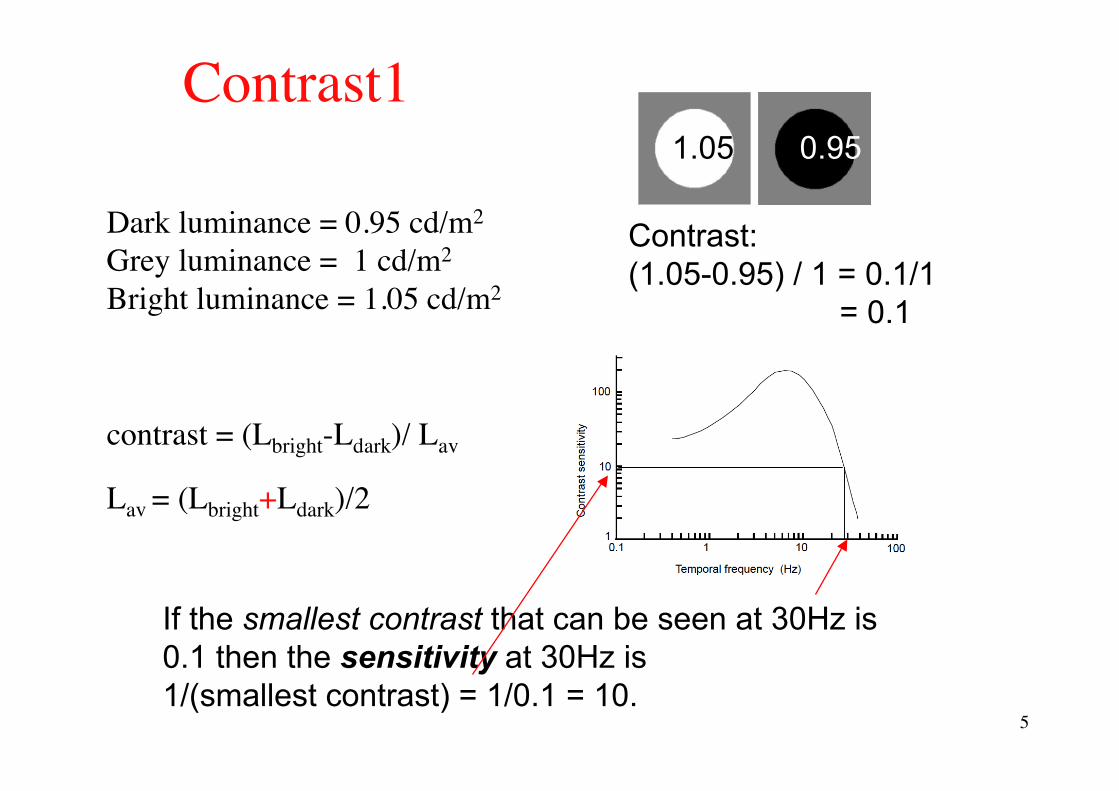
Contrast1
contrast = (Lbright-Ldark)/ Lav
Lav = (Lbright+Ldark)/2
Dark luminance = 0.95 cd/m2
Grey luminance = 1 cd/m2
Bright luminance = 1.05 cd/m2
Contrast:(1.05-0.95) / 1 = 0.1/1
= 0.1
1.05 0.95
If the smallest contrast that can be seen at 30Hz is0.1 then the sensitivity at 30Hz is 1/(smallest contrast) = 1/0.1 = 10.
6
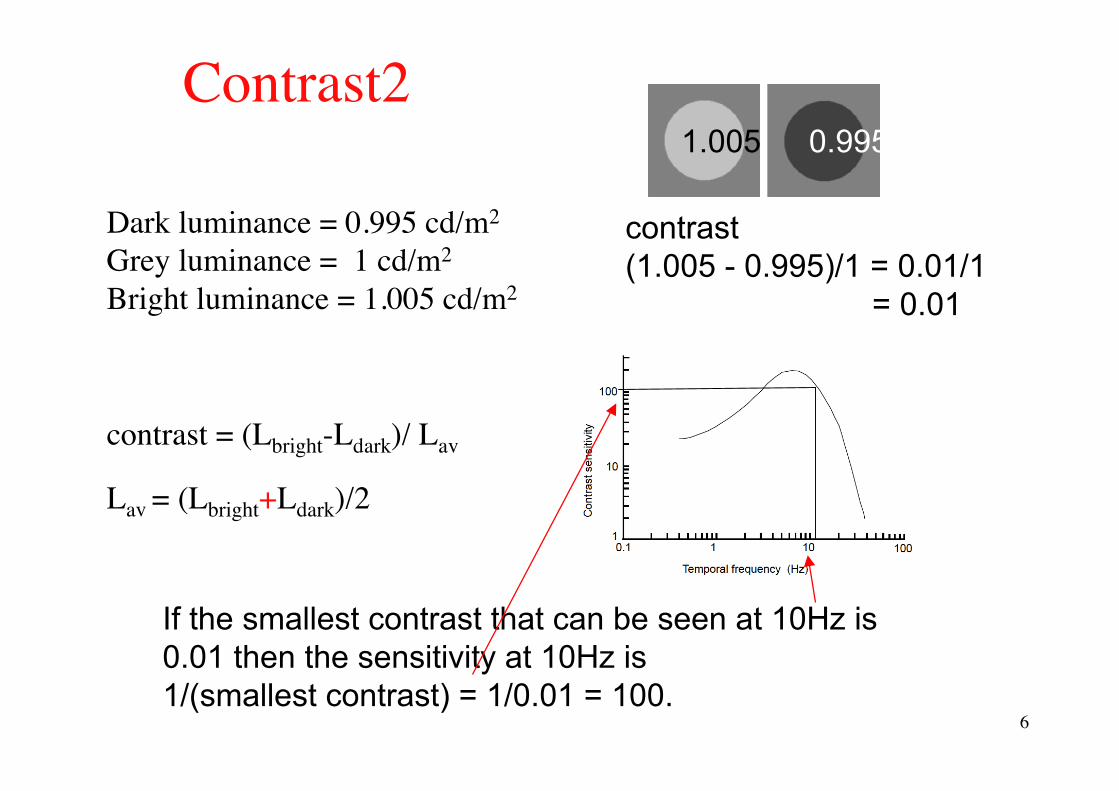
Contrast2
contrast = (Lbright-Ldark)/ Lav
Lav = (Lbright+Ldark)/2
Dark luminance = 0.995 cd/m2
Grey luminance = 1 cd/m2
Bright luminance = 1.005 cd/m2
contrast(1.005 - 0.995)/1 = 0.01/1
= 0.01
1.005 0.995
If the smallest contrast that can be seen at 10Hz is0.01 then the sensitivity at 10Hz is 1/(smallest contrast) = 1/0.01 = 100.
7
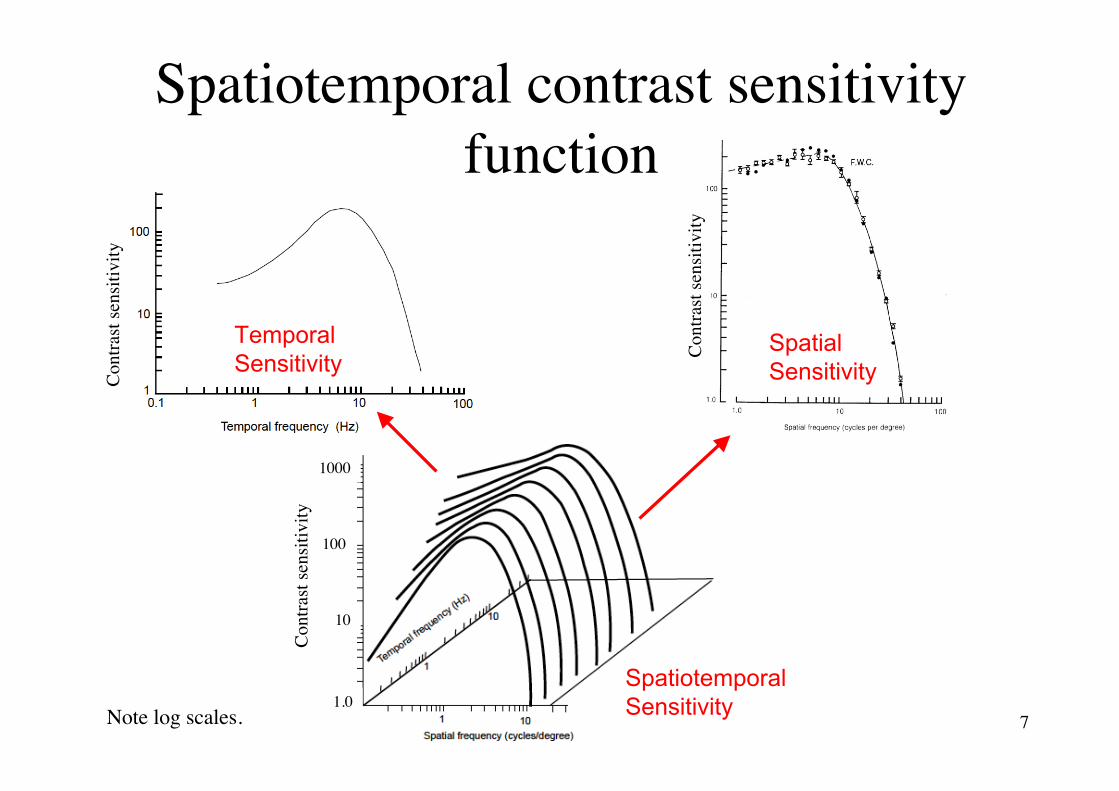
Spatiotemporal contrast sensitivityfunction
TemporalSensitivity
SpatialSensitivity
SpatiotemporalSensitivityNote log scales.
Con
trast
sens
itivi
ty
1.0
10
100
1000
Con
trast
sens
itivi
ty
Con
trast
sens
itivi
ty
8
Apparent Motion• In the physical world, perception
of motion usually involvesphysically continuous motion ofobjects.
• However, we also perceive motionwhen presented with (changing)static images in rapid presentation.
• This is known as apparent motionand is the basis for the perceptionof moving images on TV, andmovies.
9
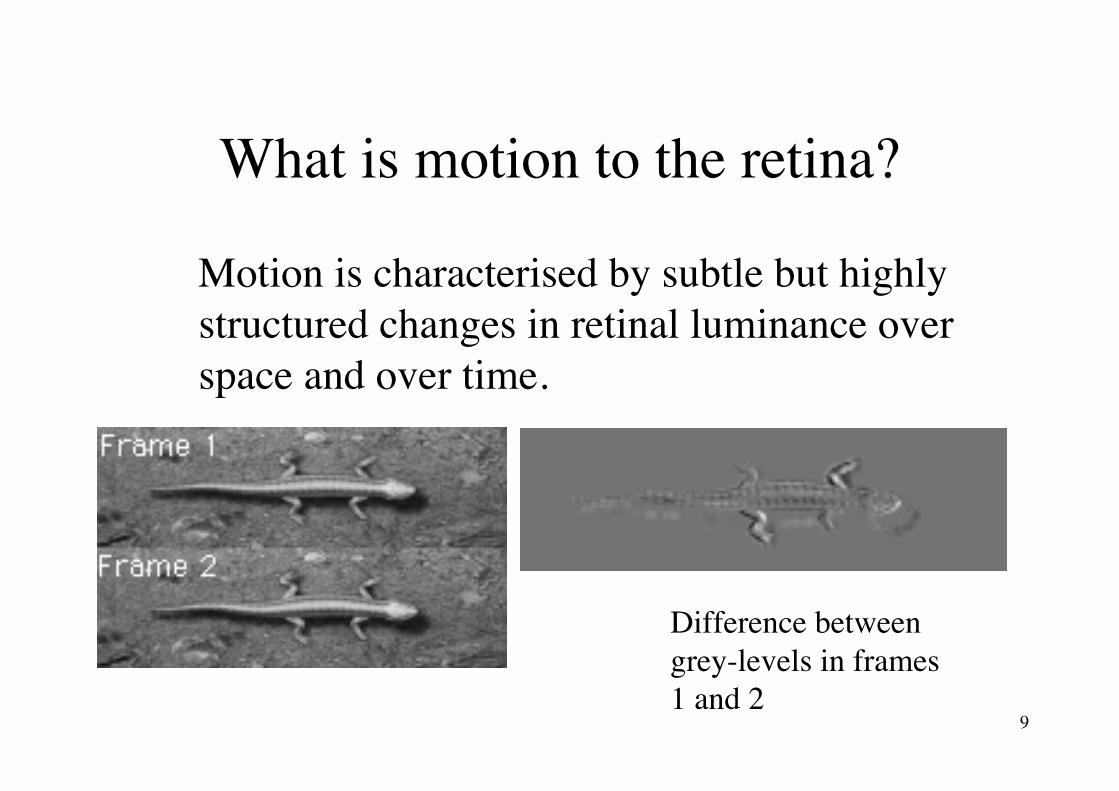
What is motion to the retina?
Motion is characterised by subtle but highlystructured changes in retinal luminance overspace and over time.
Difference between grey-levels in frames 1 and 2
10
Neural motion detectors• Motion detection invloves the comparison of one retinal
receptor’s response with that of another receptor’s response.• This can be modelled as two receptors feeding into a
comparator neuron (ie part of a Reichardt detector).• Each neural motion detector has a preferred direction and
speed.
11
1 sec
C
A
B
1 sec
C’s output
B’s output
A’s output
ANDGate
Retina
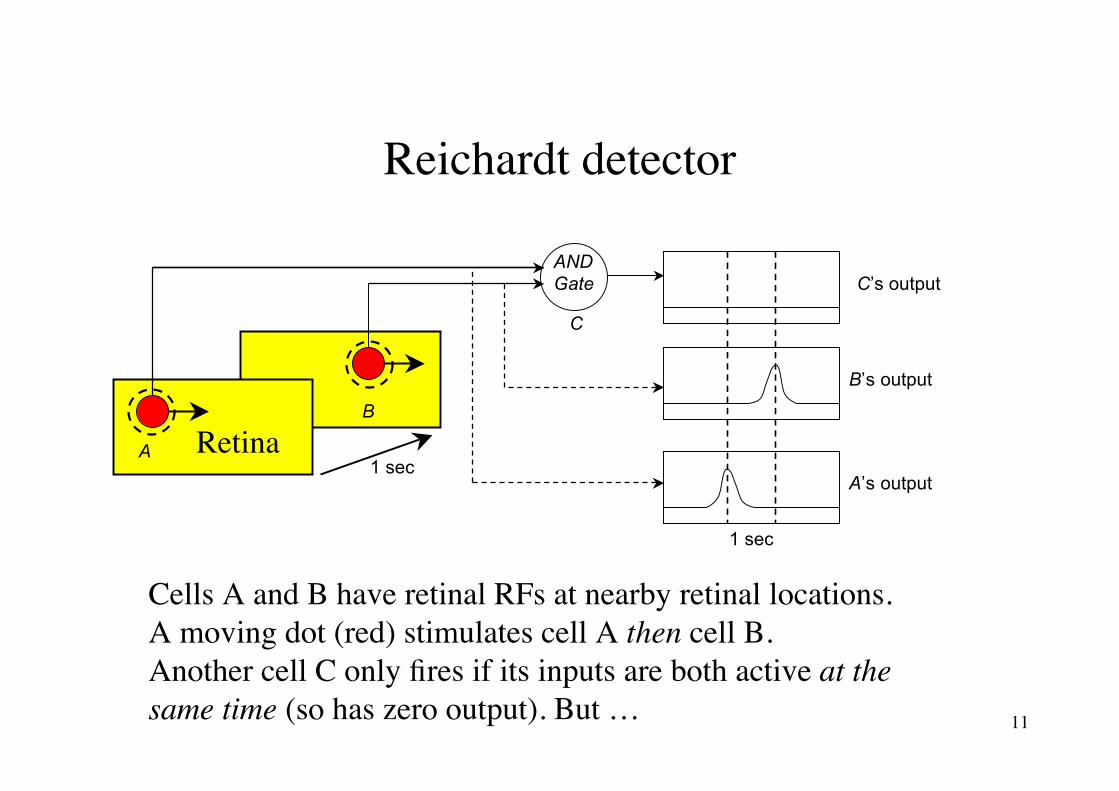
Reichardt detector
Cells A and B have retinal RFs at nearby retinal locations.A moving dot (red) stimulates cell A then cell B. Another cell C only fires if its inputs are both active at thesame time (so has zero output). But …

12
1 sec
CR
1 sec delay
B
A
1 sec
CR’s output
B’s output
A’s output
ANDGate
Retina
Reichardt detector
If we introduce a delay in A’s output then the inputs to C areactive at the same time, so C fires, signalling motion across the retina.
13
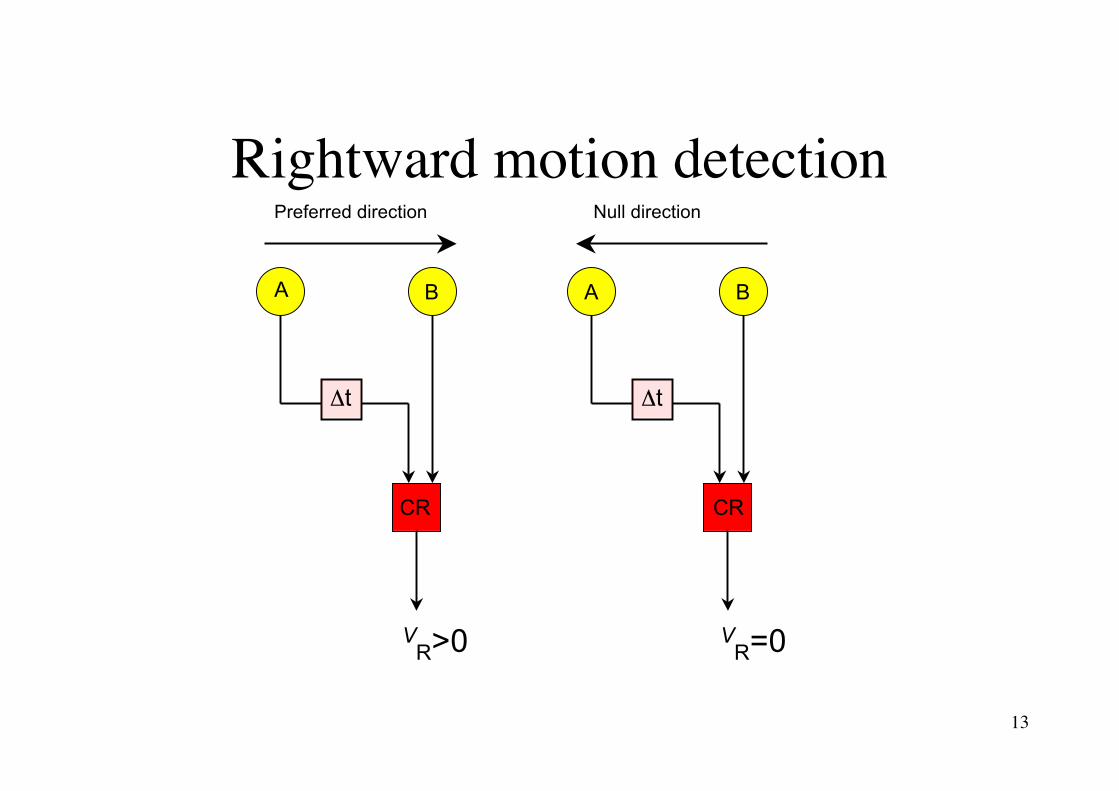
Δt
Preferred direction
Δt
Null direction
A B BA
CR CR
Rightward motion detection
VR>0 V
R=0
14
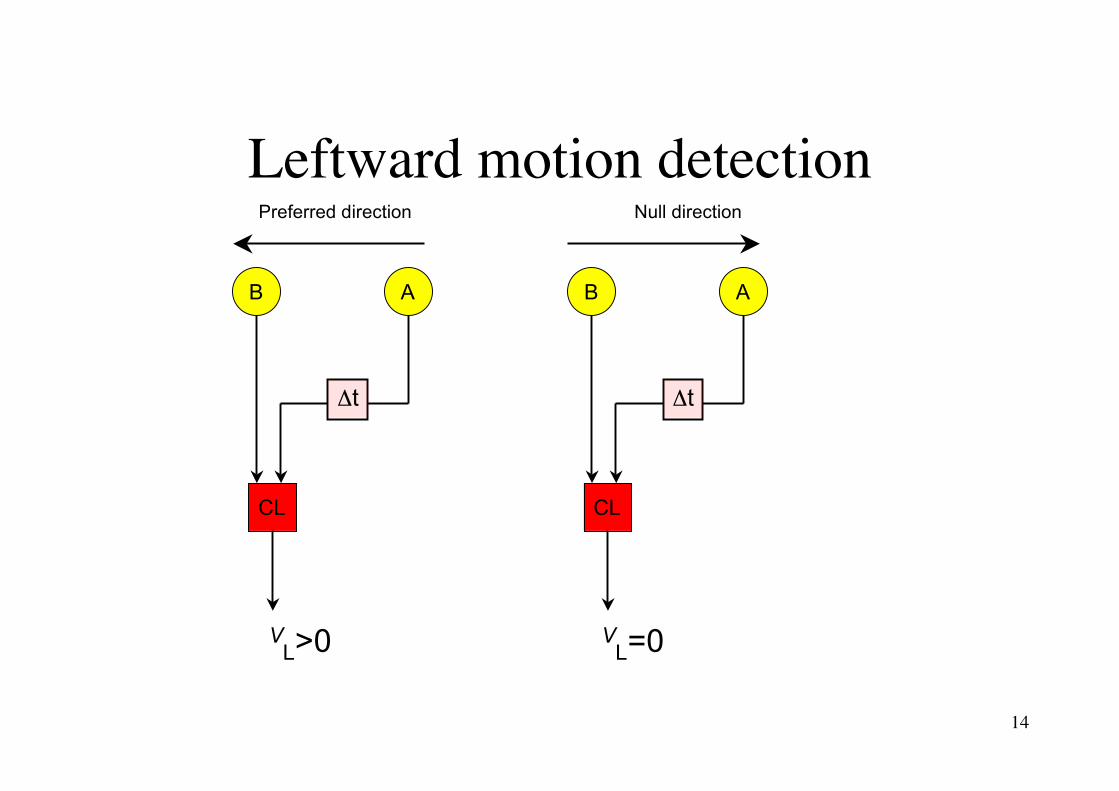
Δt
Null direction
AB
CL
Δt
Preferred direction
AB
CL
Leftward motion detection
VL>0 V
L=0
15
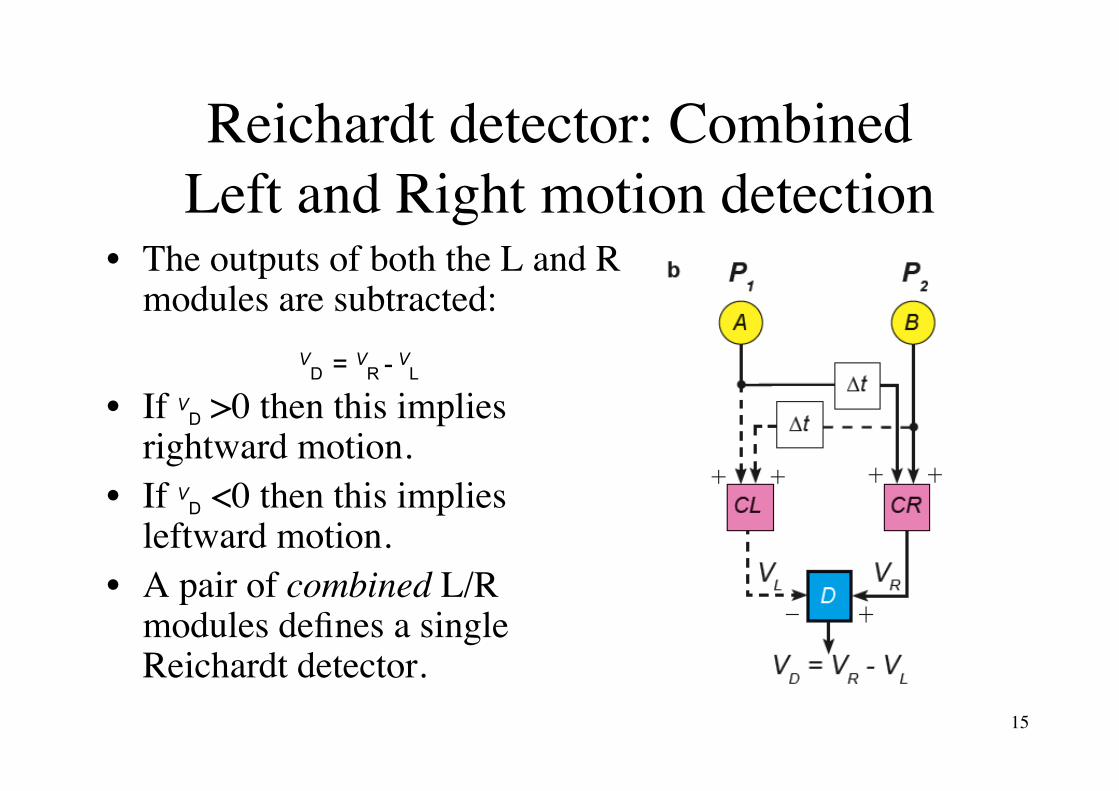
Reichardt detector: CombinedLeft and Right motion detection
• The outputs of both the L and Rmodules are subtracted:
VD
= VR - V
L
• If VD >0 then this implies
rightward motion.• If V
D <0 then this impliesleftward motion.
• A pair of combined L/Rmodules defines a singleReichardt detector.
16
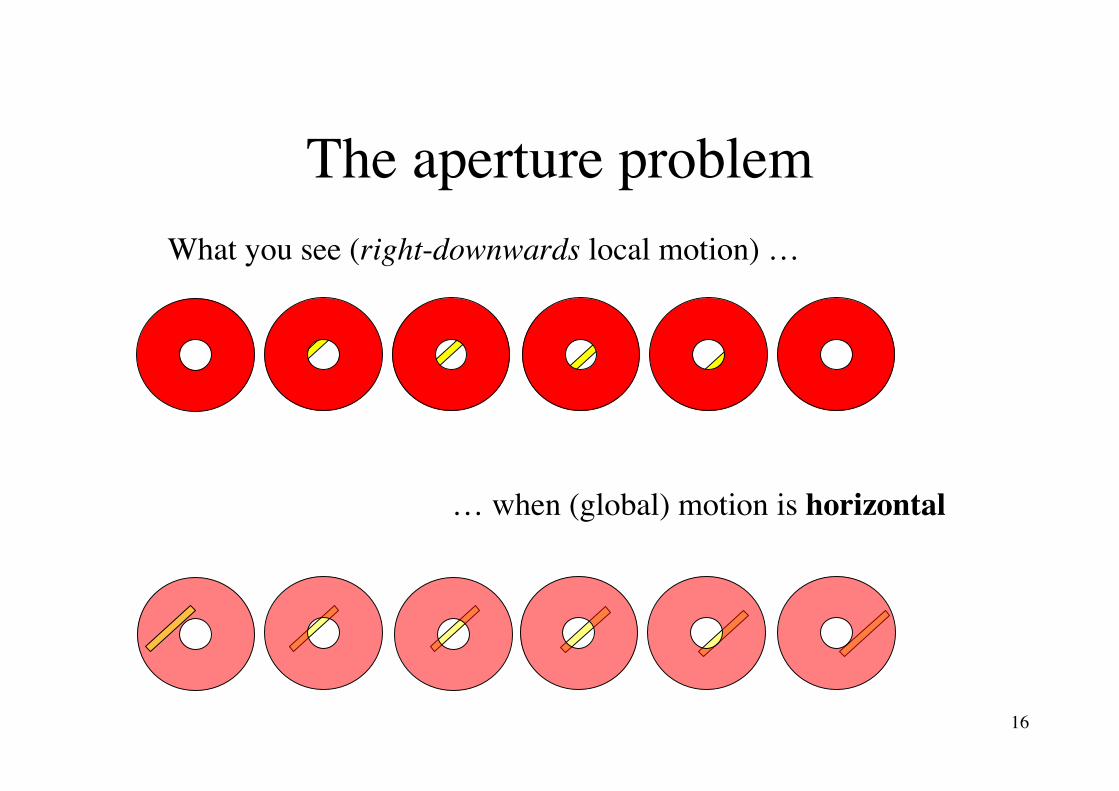
The aperture problemWhat you see (right-downwards local motion) …
… when (global) motion is horizontal
17
Local and global motion
18
Global
motion + =
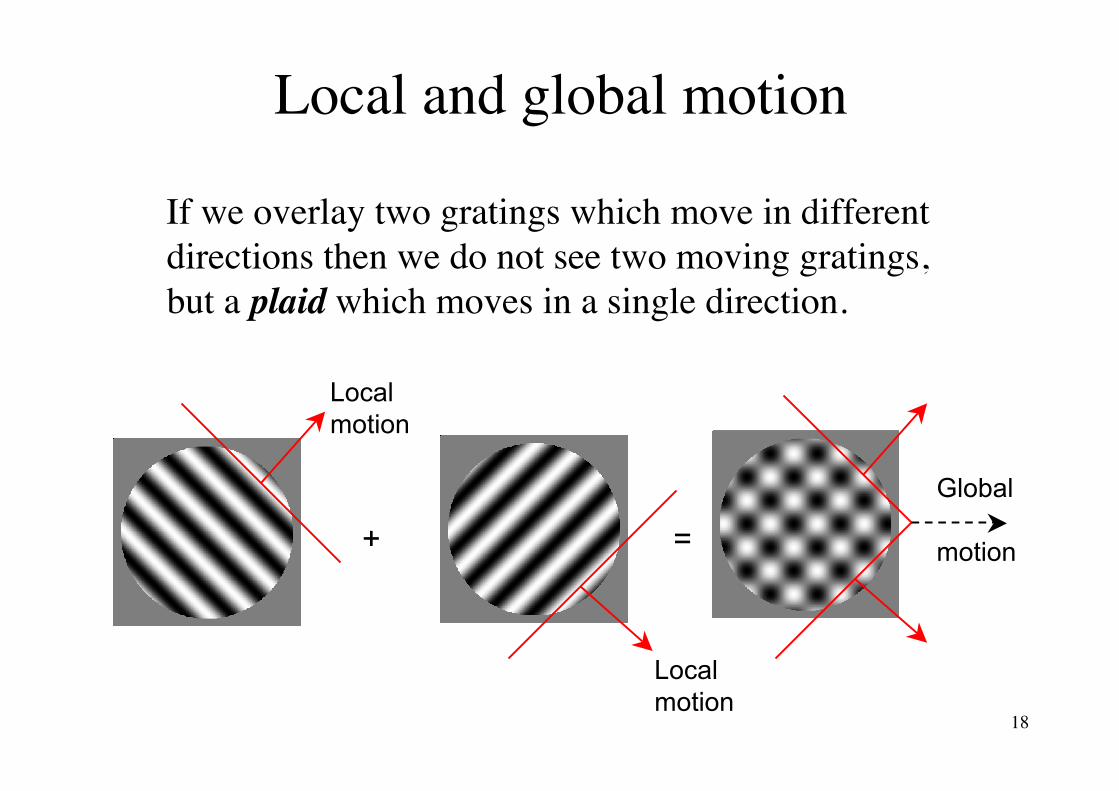
Local and global motion
If we overlay two gratings which move in differentdirections then we do not see two moving gratings,but a plaid which moves in a single direction.
Local motion
Local motion
19
θ
v1
Global motion vectorv0
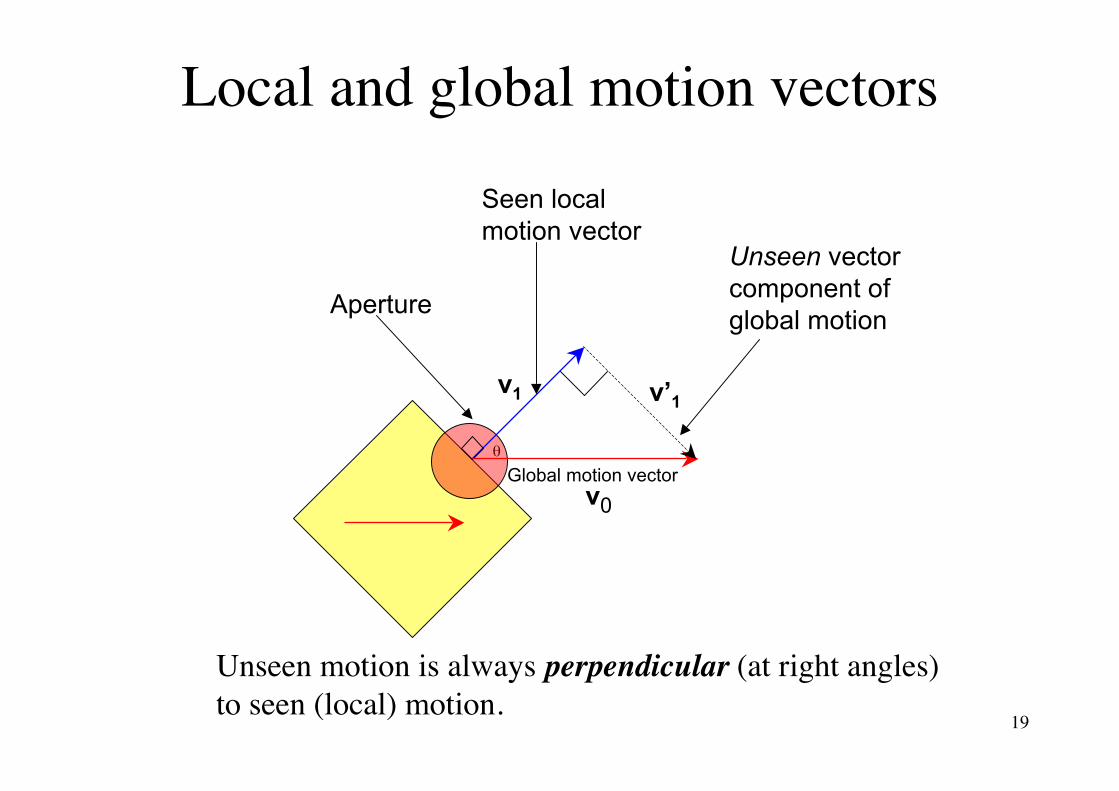
Local and global motion vectors
Aperture
Seen local motion vector
v’1
Unseen vector component of global motion
Unseen motion is always perpendicular (at right angles)to seen (local) motion.
20
θ
v1
Global motion vectorv0
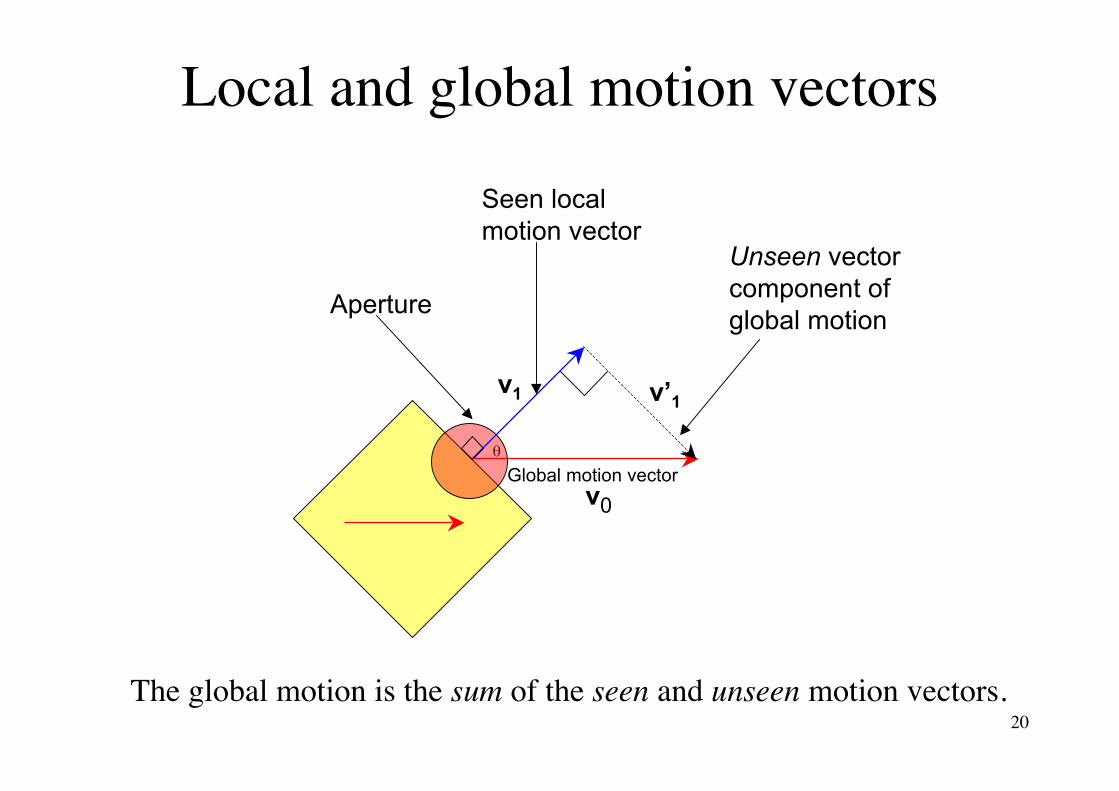
Local and global motion vectors
Aperture
Seen local motion vector
v’1
Unseen vector component of global motion
The global motion is the sum of the seen and unseen motion vectors.
21
Arrows, vectors and sums of vectors
• The direction and speed can be described by avector (which is basically an arrow).
• The direction of the vector is the motiondirection.
• The length of the vector is the motion speed.• In order to know how to combine the seen and
unseen local motions, all we need to know ishow to add two vectors …
22
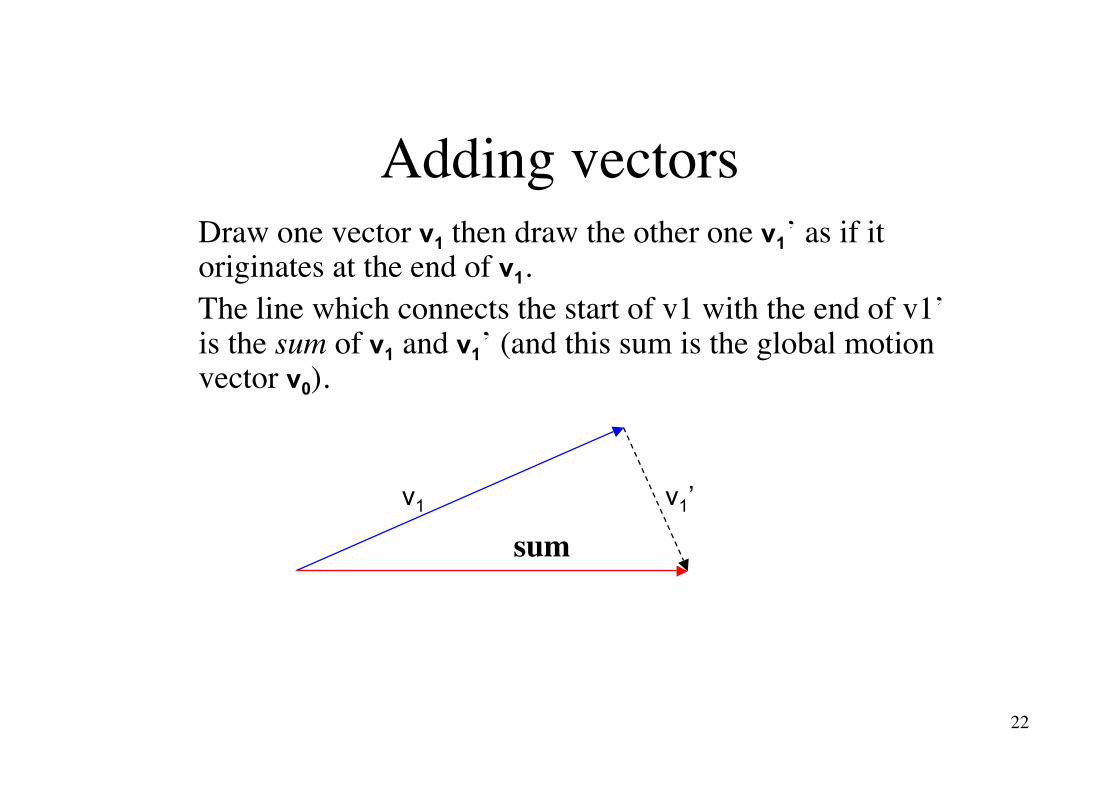
Adding vectorsDraw one vector v1 then draw the other one v1’ as if itoriginates at the end of v1.The line which connects the start of v1 with the end of v1’is the sum of v1 and v1’ (and this sum is the global motionvector v0).
sumv1 v1’
23
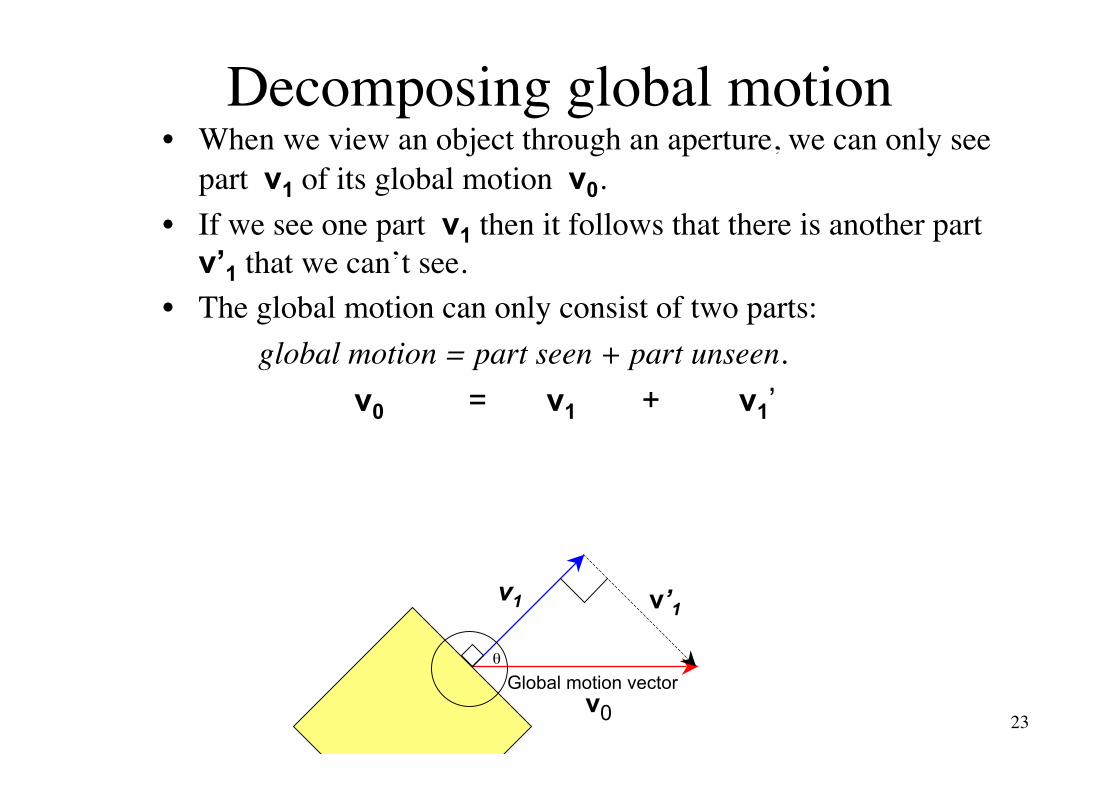
• When we view an object through an aperture, we can only seepart v1 of its global motion v0.
• If we see one part v1 then it follows that there is another partv’1 that we can’t see.
• The global motion can only consist of two parts:global motion = part seen + part unseen.
v0 = v1 + v1’
θ
v1 v’1
Global motion vectorv0
Decomposing global motion
24
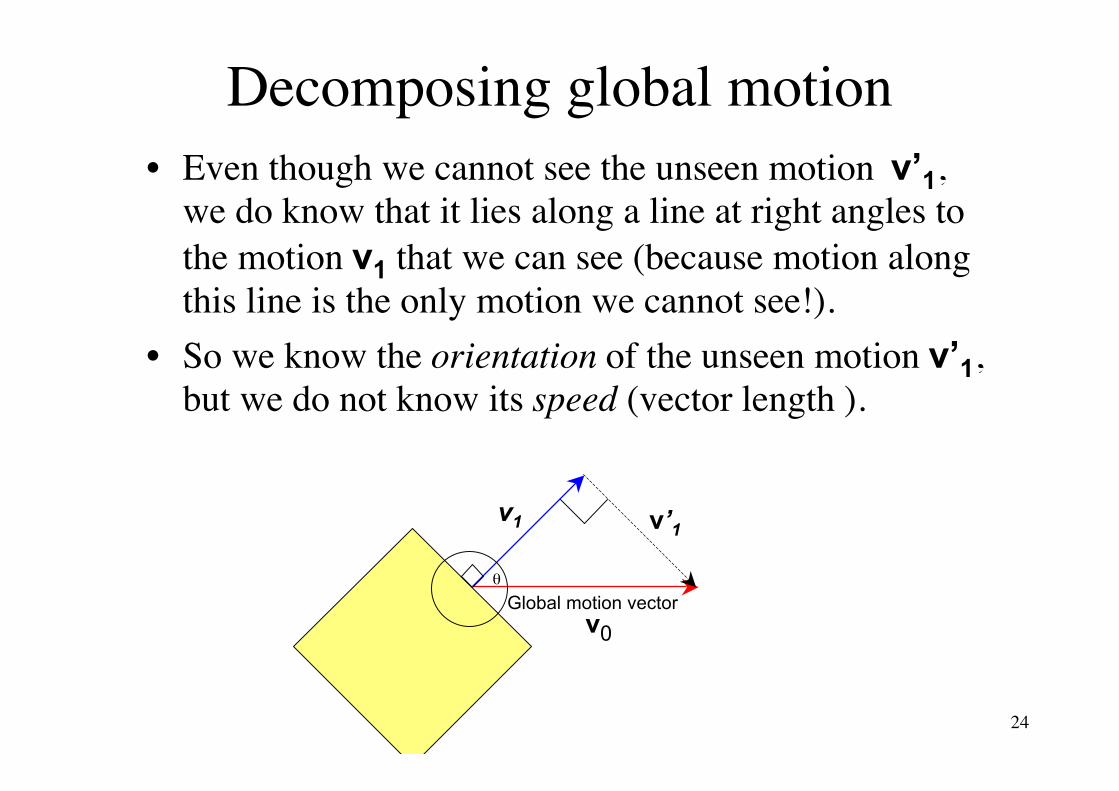
• Even though we cannot see the unseen motion v’1,we do know that it lies along a line at right angles tothe motion v1 that we can see (because motion alongthis line is the only motion we cannot see!).
• So we know the orientation of the unseen motion v’1,but we do not know its speed (vector length ).
Decomposing global motion
θ
v1 v’1
Global motion vectorv0
25
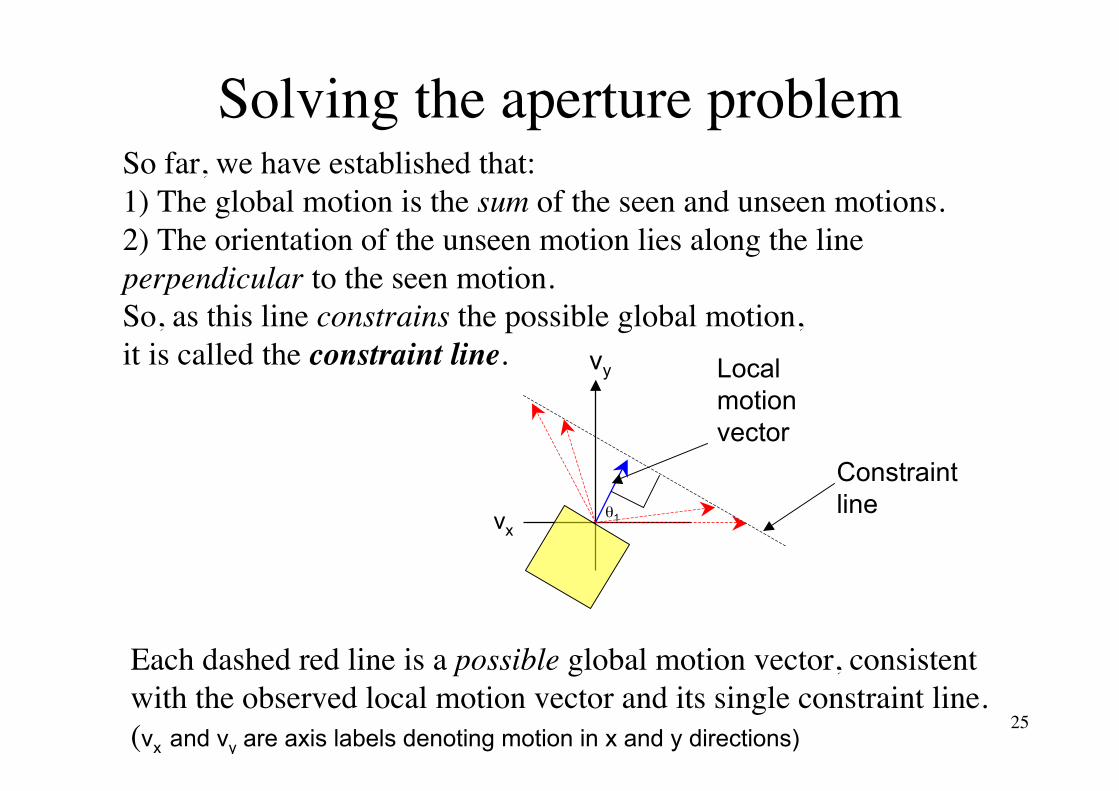
Each dashed red line is a possible global motion vector, consistent with the observed local motion vector and its single constraint line.(vx and vy are axis labels denoting motion in x and y directions)
Solving the aperture problem
vx
vy Local motion vector
Constraint lineθ1
So far, we have established that:1) The global motion is the sum of the seen and unseen motions.2) The orientation of the unseen motion lies along the line perpendicular to the seen motion. So, as this line constrains the possible global motion, it is called the constraint line.
26
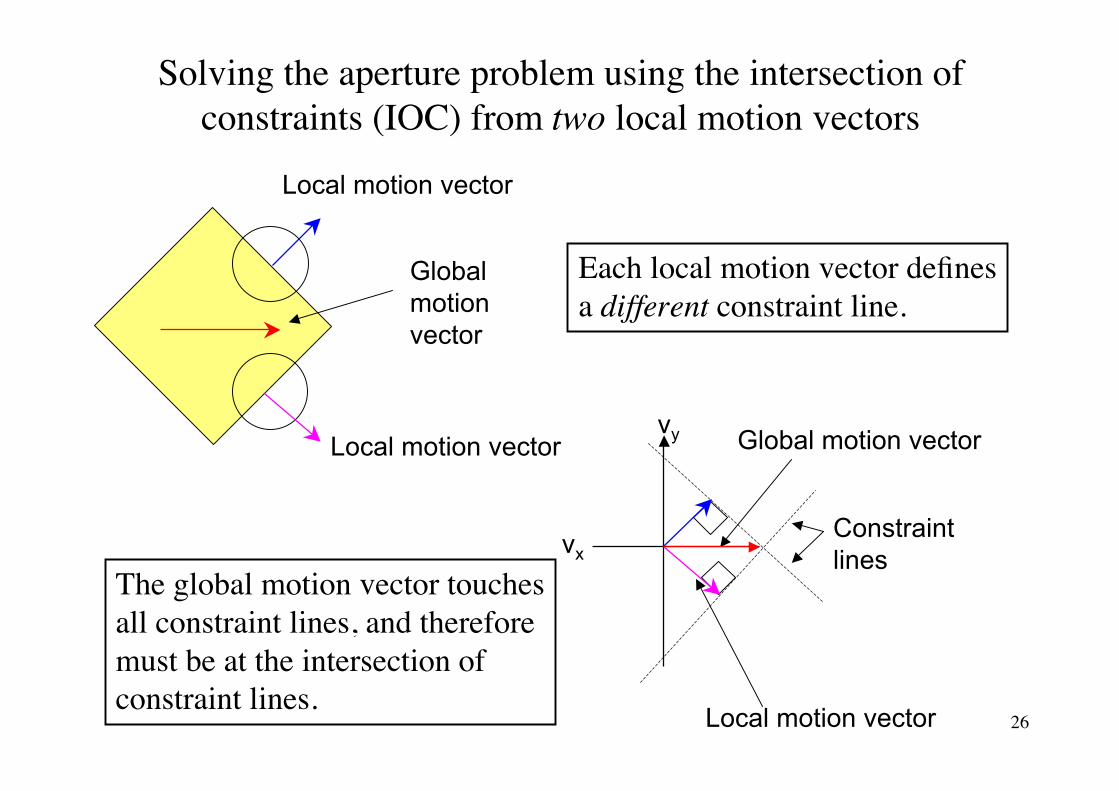
Local motion vector
Global motion vector
vy Global motion vector
Local motion vector
Constraint linesvx
Solving the aperture problem using the intersection ofconstraints (IOC) from two local motion vectors
Local motion vector
Each local motion vector definesa different constraint line.
The global motion vector touchesall constraint lines, and thereforemust be at the intersection of constraint lines.
27
ReferencesEssential Reading
• Frisby JP and Stone JV Seeing Motion Part 1 Chapter 14.
Background Reading• Frisby, JP and Stone, J.V. Seeing Motion: Part II Chapter 15.• Farah, M. J. (2000). The Cognitive Neuroscience of Vision. Oxford, UK:
Blackwells Publishers Ltd.• Schenk, T., & Zihl, J. (1997). Visual motion perception after brain damage. I.
Deficits in global motion perception. Neuropsychologia, 35, 1289 - 1297.• Zeki, S. M. (1993). A vision of the brain.• Zeki, S. M., Watson, J. D. G., Lueck, C. J., Friston, K., Kennard, C., &
Frackowiak, R. S. J. (1991). A direct demonstration of functionalspecialization in human visual cortex. Journal of Neuroscience, 11, 641 -649.