-
8/13/2019 MOM Chapter1
1/6
LECTURE 1
INTRODUCTION AND REVIEW
Preamble
Engineering science is usually subdivided into number of topics
such as
1. Solid Mechanics
2. Fluid Mechanics
3. Heat Transfer
. !roperties of materials and soon "lthough there are close
lin#s bet$een them in terms of the physical principlesinvolved and
methods of analysis employed.
The solid mechanics as a sub%ect may be defined as a branch of
applied mechanics that deals $ith behaviours of
solid bodies sub%ected to various types of loadings. This is
usually subdivided into further t$o streams i.e Mechanicsof rigid
bodies or simply Mechanics and Mechanics of deformable solids.
The mechanics of deformable solids $hich is branch of applied
mechanics is #no$n by several names i.e. strength ofmaterials&
mechanics of materials etc.
Mechanics of rigi boies!
The mechanics of rigid bodies is primarily concerned $ith the
static and dynamic behaviour under e'ternal forces ofengineering
components and systems $hich are treated as infinitely strong and
undeformable !rimarily $e deal here$ith the forces and motions
associated $ith particles and rigid bodies.
Mechanics of eformable solis !
Mechanics of solis!
The mechanics of deformable solids is more concerned $ith the
internal forces and associated changes in thegeometry of the
components involved. (f particular importance are the properties of
the materials used& the strengthof $hich $ill determine $hether
the components fail by brea#ing in service& and the stiffness
of $hich $ill determine$hether the amount of deformation they
suffer is acceptable. Therefore& the sub%ect of mechanics of
materials orstrength of materials is central to the $hole activity
of engineering design. )sually the ob%ectives in analysis here
$illbe the determination of the stresses& strains& and
deflections produced by loads. Theoretical analyses ande'perimental
results have an e*ual roles in this field.
Anal"sis of s#ress an s#rain !
Conce$# of s#ress ! +et us introduce the concept of stress as $e
#no$ that the main problem of engineering
mechanics of material is the investigation of the internal
resistance of the body& i.e. the nature of forces set up
$ithina body to balance the effect of the e'ternally applied
forces.
The e'ternally applied forces are termed as loads. These
e'ternally applied forces may be due to any one of thereason.
,i- due to service conditions
,ii- due to environment in $hich the component $or#s
-
8/13/2019 MOM Chapter1
2/6
,iii- through contact $ith other members
,iv- due to fluid pressures
,v- due to gravity or inertia forces.
"s $e #no$ that in mechanics of deformable solids&
e'ternally applied forces acts on a body and body suffers
adeformation. From e*uilibrium point of vie$& this action
should be opposed or reacted by internal forces $hich are setup
$ithin the particles of material due to cohesion.
These internal forces give rise to a concept of stress.
Therefore& let us define a stress Therefore& let us define
a termstress
%#ress!
+et us consider a rectangular bar of some cross sectional area
and sub%ected to some load or force ,in /e$tons -
+et us imagine that the same rectangular bar is assumed to be
cut into t$o halves at section 00. The each portion ofthis
rectangular bar is in e*uilibrium under the action of load ! and
the internal forces acting at the section 00 hasbeen sho$n
/o$ stress is defined as the force intensity or force per unit
area. Here $e use a symbol to represent the stress.
here " is the area of the 0 section
-
8/13/2019 MOM Chapter1
3/6
Here $e are using an assumption that the total force or total
load carried by the rectangular bar is uniformlydistributed over
its cross section.
ut the stress distributions may be for from uniform& $ith
local regions of high stress #no$n as stress concentrations.
f the force carried by a component is not uniformly distributed
over its cross sectional area& "& $e must consider a
small area& 4"5 $hich carries a small load !& of the
total force 4!5& Then definition of stress is
"s a particular stress generally holds true only at a point&
therefore it is defined mathematically as
Uni#s !
The basic units of stress in S. units i.e. ,nternational system-
are / 6 m2,or !a-
M!a 7 189!a
:!a 7 18;!a
Some times / 6 mm2units are also used& because this is an
e*uivalent to M!a. hile )S customary unit is pound pers*uare inch
psi.
T&PE% O' %TRE%%E% !
only t$o basic stresses e'ists = ,1- normal stress and ,2- shear
shear stress. (ther stresses either are similar to thesebasic
stresses or are a combination of these e.g. bending stress is a
combination tensile& compressive and shearstresses. Torsional
stress& as encountered in t$isting of a shaft is a shearing
stress.
+et us define the normal stresses and shear stresses in the
follo$ing sections.
Normal s#resses !e have defined stress as force per unit area. f
the stresses are normal to the areas concerned&
then these are termed as normal stresses. The normal stresses
are generally denoted by a :ree# letter , -
-
8/13/2019 MOM Chapter1
4/6
This is also #no$n as unia'ial state of stress& because the
stresses acts only in one direction ho$ever& such a staterarely
e'ists& therefore $e have bia'ial and tria'ial state of
stresses $here either the t$o mutually perpendicularnormal stresses
acts or three mutually perpendicular normal stresses acts as sho$n
in the figures belo$ =
Tensile or com$ressi(e s#resses !
The normal stresses can be either tensile or compressive $hether
the stresses acts out of the area or into the area
)earing %#ress ! hen one ob%ect presses against another& it
is referred to a bearing stress , They are in fact thecompressive
stresses -.
-
8/13/2019 MOM Chapter1
5/6
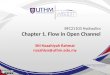
%hear s#resses !
+et us consider no$ the situation& $here the cross sectional
area of a bloc# of material is sub%ect to a distribution offorces
$hich are parallel& rather than normal& to the area
concerned. Such forces are associated $ith a shearing of
the material& and are referred to as shear forces. The
resulting force interistes are #no$n as shear stresses.
The resulting force intensities are #no$n as shear stresses&
the mean shear stress being e*ual to
here ! is the total force and " the area over $hich it acts.
"s $e #no$ that the particular stress generally holds good only
at a point therefore $e can define shear stress at apoint as
The gree# symbol , tau - , suggesting tangential - is used to
denote shear stress.
Ho$ever& it must be borne in mind that the stress ,
resultant stress - at any point in a body is basically resolved
into
t$o components and one acts perpendicular and other parallel to
the area concerned& as it is clearly defined in
the follo$ing figure.
-
8/13/2019 MOM Chapter1
6/6
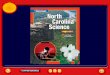
The single shear ta#es place on the single plane and the shear
area is the cross > sectional of the rivett& $hereas
thedouble shear ta#es place in the case of utt %oints of rivetts
and the shear area is the t$ice of the 0 > sectional area ofthe
rivett.