Embed Size (px)
Citation preview

Modeling, Vibration Control, and TrajectoryTracking of a Kinematically Constrained Planar
Hybrid Cable-Driven Parallel Robot
Ronghuai Qi∗
Department of Mechanical andMechatronics Engineering,
University of Waterloo,Waterloo, ON N2L 3G1, Canada
e-mail: [email protected]
Amir Khajepour
Department of Mechanical andMechatronics Engineering,
University of Waterloo,Waterloo, ON N2L 3G1, Canada
e-mail: [email protected]
William W. Melek
Department of Mechanical andMechatronics Engineering,
University of Waterloo,Waterloo, ON N2L 3G1, Canada
e-mail: [email protected]
This paper presents a kinematically constrained planar hy-brid cable-driven parallel robot (HCDPR) for warehousingapplications as well as other potential applications suchas rehabilitation. The proposed HCDPR can harness thestrengths and benefits of serial and cable-driven parallelrobots. Based on this robotic platform, the goal in this pa-per is to develop an integrated control system to reduce vi-brations and improve the trajectory accuracy and perfor-mance of the HCDPR, including deriving kinematic and dy-namic equations, proposing solutions for redundancy reso-lution and optimization of stiffness, and developing two mo-tion and vibration control strategies (controllers I and II).Finally, different case studies are conducted to evaluate thecontrol performance, and the results show that the controllerII can achieve the goal better.
NOMENCLATUREm j Mass of the jth ( j = 1,2) link of the robot arm.mm Mass of the mobile platform.Im Moment of inertia of the mobile platform.I j Moment of inertia of the jth ( j = 1,2) link of the
robot arm.l j Length of the jth ( j = 1,2) link of the robot arm.
lc j Length between the joint j ( j = 1,2) and the centerof mass of link j of the robot arm.
pe Vector of positions and orientation of the end-effector.
∗Corresponding author.
q Vector of generalized coordinates.q First order time-derivative of q.q Second order time-derivative of q.
pm Vector of positions and orientation of the mobile plat-form.
τ Vector of generalized forces.T Vector of cable tensions.
Fe External forces applied to the end-effector or the mo-bile platform.
Me External moment applied to the end-effector or themobile platform.
g Gravitational acceleration.pm The position and orientation of the mobile platform.A Structure matrix.Li The position vector from the ith cable anchor point on
the robot static frame to the ith cable anchor point onthe mobile platform.
Li Unit position vector of the ith cable.L Cable length vector.
L0 Vector of unstretched cable lengths.Ti Vector of the ith cable tension.K Stiffness matrix.
KT Stiffness matrix as a product of the cable tensions.Kk Stiffness matrix as a product of the cable stiffness.Kc Cable stiffness matrix.Ei Elastic modulus of the ith cable.
Aci Cross section of the ith cable.Je Jacobian matrix.
1
arX
iv:2
012.
1402
9v1
[cs
.RO
] 2
7 D
ec 2
020

1 IntroductionSerial manipulators are one of the most common types
of industrial robots, which consist of a base, a series of linksconnected by actuator-driven joints, and an end-effector.Usually, they have 6 DOFs and offer high positioning ac-curacy. They are commonly used in industrial applications;however, they have some key limitations, such as high mo-tion inertia and limited workspace envelope [1]. For ex-ample, the KUKA KR 60 HA is a 6-DOF serial roboticmanipulator with a high payload (60 kg) carrying capacityand repeatability of ±0.05 mm, but the maximum reach is2033 mm [2]. CDPRs are another important type of indus-trial robots. Their configurations usually bear resemblance toparallel manipulators (e.g., Stewart platform [3]). The NISTRoboCrane [4, 5] is a typical CDPR with 6 DOFs, which isdesigned by utilizing the idea of the Stewart platform, andits unique feature is its use of six cables instead of linearactuators. For these robots, rigid links are replaced with ca-bles. This reduces the robot weight since cables are almostmassless. It also eliminates the use of revolute joints. Thesefeatures allow the mobile platform to reach high motion ac-celerations in large workspaces. For instance, some exist-ing CDPRs were designed and analyzed in [6, 7, 8, 9]. How-ever, they are not without some drawbacks, such as their lowaccuracy, high vibrations, etc., all of which limit their ap-plications [10]. To overcome the aforementioned shortagesof serial and cable-driven parallel robots as well as aggre-gate their advantages, one approach is to combine these twotypes of robots to create a hybrid cable-driven parallel robot(HCDPR).
Some research and applications have been developedas follows: Albus [11] developed a cable-driven manipula-tor, where a robot arm was fixed upside down to the bot-tom of the RoboCrane robot’s platform [4, 5] for lifting aload. Cable-driven camera systems are another type of cable-driven robots (cameras are affixed to the CDPRs) that can beused for different applications such as overhead filming [12].Gouttefarde [13] developed a CDPR (called CoGiRo CSPR)with the onboard Yaskawa-Motoman SIA20 robot arm forcontactless and interacting applications (e.g., spray paintingand metal cutting), but this project still has the main prob-lems of low stiffness of the CDPR which will result in vibra-tions.
However, the literature shows that existing research andapplications prefer to affix a robot arm upside down to thebottom of a CDPR’s platform [14,15,16,17,11,18] or mainlycontrol the cable robot while treating the serial robot as amanipulation tool or an end-effector rather than a whole sys-tem [11, 18]. When a serial robot is mounted on a mobileplatform, the two constitute a new coupled system. Onlycontrolling the mobile platform (i.e., treating the serial robotas a manipulation tool) or the serial robot may not guar-antee the position accuracy of the end-effector. For appli-cations that use such a system, the main goal is to controlthe end-effector of the serial robot (e.g., its trajectories andvibrations) in order to effectively accomplish tasks such aspick-and-place. Another major challenge in the utilizationof these systems is maintaining the appropriate cable ten-
sions and stiffness for the robot. The stiffness of CDPRs isan important issue, because driven cables are flexible, whichreduce the robotic overall stiffness of the robots (comparedto rigid cables) and produce undesired vibrations. When aCDPR moves, driven cables should maintain enough ten-sions to reduce vibrations, i.e., keep enough stiffness for therobot [19]. Regarding stiffness problem, some research hasbeen developed: Behzadipour and Khajepour [19] have pro-posed an equivalent four-spring model to express the stiff-ness matrices of a CDPR. They also used a simulation exam-ple to verify this model. Azadi et al. [20] introduced variablestiffness elements using antagonistic forces. Gosselin [21]analyzed the stiffness mapping for parallel manipulators byconsidering the internal forces; conversely, Griffis and Duffy[22] modeled the global stiffness of a class of simple compli-ant couplings without considering the internal forces. Whilefor a HCDPR, the moving robot arm also generates reac-tion forces acting on the mobile platform, resulting in mo-bile platform vibrations. Hence, it is challenging to achievethe goal of minimizing the vibrations and increasing the po-sition accuracy of the end-effector simultaneously. To thebest of our knowledge, limited studies address the modelingand control problems of flexible HCDPRs, especially, whenthe redundancy and stiffness optimization problems are in-troduced, the control of trajectories and vibrations becomesmore challenging. Although the research in [13] showed aCDPR carrying a robot arm for painting large surfaces, vi-brations were obvious and large based on their demonstra-tion.
To solve the aforementioned problems in HCDPRs, thegoal of this paper is to develop an integrated control sys-tem for the HCDPR to reduce vibrations and improve accu-racy and performance. To achieve this goal, the followingtasks are pursued: 1) derive analytical kinematic and dy-namic equations for the HCDPR; 2) propose solutions forredundancy resolution and optimization of stiffness; 3) de-velop motion and vibration control methods for the HCDPR;and 4) conduct simulations to validate the effectiveness ofthe control methods proposed in Step 3). Additionally, themain contributions are as follows:
1. A kinematically constrained planar HCDPR is proposedto harness the strengths and benefits of serial and cable-driven parallel robots. Detailed kinematic and dynamicequations are derived for this robot. An equivalent dy-namic modeling (EDM) method is proposed to derivethe dynamic equations of the HCDPR. This method hassome advantages, e.g., by providing an effective solutionfor different configurations of HCDPRs.
2. Based on the configuration and models of the HCDPR,the redundancy resolution and stiffness maximization al-gorithms are proposed.
3. Control strategies are designed for the HCDPR systemto reduce vibrations and trajectory tracking errors. Com-pared to the existing study in [23,24], this paper empha-sizes the reaction performance between the mobile plat-form and the robot arm as well as trajectory tracking ofthe end-effector.
2

Furthermore, the e-commerce explosion in recentyears [25] stimulates the growth of automated warehousingsolutions. By 2024, the market of global automated materialhandling equipment is predicted to no less than US$ 50.0 Bil-lion with a CAGR of 8% [26]. These increase of automatedwarehousing applications offers a unique opportunity for thedevelopment of cable-driven robots. This paper provides avalid solution for these robots.
The rest of the paper is organized as follows: systemmodeling for the HCDPR is proposed in Section 2. In Sec-tion 3, the methods for redundancy resolution, optimizationof stiffness, and controller design are proposed. Simulationresults are evaluated in Section 4. Finally, in Section 5, con-clusions are summarized.
2 Modeling of the Kinematically Constrained PlanarHCDPR
2.1 HCDPR ConfigurationCDPRs are very useful in industries (e.g., warehousing),
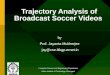
but they have some limitations (e.g., accuracy and vibra-tions). Serial robots have higher accuracy but are limited interms of their workspace envelope. In this paper, the CDPRdesigned and studied in [8, 9, 27, 28] is used for the devel-opment of the HCDPR, its integrated controller and eval-uation and validation of the results. The proposed planarHCDPR consists of a 2-DOF robot arm (in the mechanicalmodel shown in Figure 1), a 6-DOF rigid mobile platform,twelve cables, and four servo motors. The actuators are usedto drive the cables to move the mobile platform. The robotarm is fixed on the mobile platform and moves with it. Thetwelve cables include four sets of cables: two sets of four-cable arrangement on the top and two sets of two-cable ar-rangement on the bottom. Each set of cables is controlled byone motor. In addition, the top actuators and bottom actua-tors control the upper cable lengths and lower cable tensions,respectively. The upper cables also restrict the orientationof the mobile platform, i.e., the kinematic constraints. TheHCDPR parameters are shown in Figure 2 and Table 1, re-spectively. The eight top cables and four bottom cables aresimplified into four cables and two cables, respectively. Theinertial coordinate frame O{x0,y0,z0} is located at the centerof the static fixture.
2.2 HCDPR KinematicsThe kinematics of the HCDPR includes forward kine-
matics and inverse kinematics. In this paper, analytical solu-tions of the kinematics will be derived for the planar HCDPRshown in Figure 2.
In Figure 2, the planar HCDPR has 5 DOFs (the mo-bile platform has 3 DOFs and the robot arm has 2 DOFs),where point Pm(xm,zm,θm) is located at the center of mass ofthe mobile platform (indicating the degrees of freedom of themobile platform); point P1(x1,z1) is located at the first jointof the attached robot arm; point Pc1(xc1,zc1) represents thecenter of mass of robot link 1; point P2(x2,z2) is located atthe second joint of the robot arm; point Pc2(xc2,zc2) denotes
Mobile platform
Lower cables
Robot arm
End-effector
Actuator Static fixture
Upper cables
Fig. 1. Mechanical model of the kinematically constrained planarHCDPR.
(a)
(b)
lb
(m1,I1)
(m2,I2)
(mm,Im)lc
lm lc1
l1
ld
lc2 l2
la
lbdOm
Zm
O
Z0
X0
L1
L2
L3
L6
L5
L4
Pm1
Pm2
Pm6
Pm5
Pm1e
Pm2e
Pm3ePm4e
Pm6e
Pm5e
Pe
P2
Pc2
Pc1P1θm
θ2θ1
lf
le
Mobile platform Cable
Robot arm
Pm3
Pm4
lh
lg
Pm(xm,zm,θm)m
Fig. 2. Configuration of the HCDPR. (a) planar HCDPR; (b) en-larged figure of the mobile platform with the robot arm.
the center of mass of robot link 2; and point Pe(xe,ze,qe)represents the positions and orientation of the robot end-effector. In addition, xm and zm denote the positions of themobile platform (the center of mass) in the X-direction andZ-direction, respectively, with respect to the inertial coordi-nate frame {O}. θm indicates the orientation of the mobileplatform with respect to the OY0-axis, θ1 and θ2 are the rel-ative angles of the robot arms as shown in Figure 2. Otherparameters of the HCDPR are also shown in Figure 2 and Ta-ble 1.
The forward kinematics is derived by given thevector of generalized coordinates (joint variables) q =[xm,zm,θm,θ1,θ2]
T ∈ R5 to find the vector of positions andorientation pe = [xe,ze,qe]
T ∈R3 and the cable length vector
3

Table 1. Parameters of the HCDPR
Symbol Values Symbol Values
la 0.440 m lbd 0.055 m
lb 0.268 m lg 0.086 m
lc 0.105 m lh 0.105 m
ld 0.412 m lm 0.052 m
le 3.000 m l1 0.305 m
l f 1.000 m l2 0.305 m
lc1 0.1525 m lc2 0.1525 m
mm 30 kg Im 0.83 kgm2
m1 10 kg I1 0.18 kgm2
m2 10 kg I2 0.18 kgm2
Tmin 40 N Tmax 2000 N
Ks 1.1×104 N g 9.810 m/s2
L = [L1,L2, · · · ,L6]T ∈ R6 as follows:
P1 :{
x1 = xm + lm cos(θm)
z1 = ym + lm sin(θm) (1)
Pc1 :{
xc1 = x1 + lc1 cos(θm +θ1)zc1 = z1 + lc1 sin(θm +θ1)
(2)
P2 :{
x2 = x1 + l1 cos(θm +θ1)z2 = z1 + l1 sin(θm +θ1)
(3)
Pc2 :{
xc2 = x2 + lc2 cos(θm +θ1 +θ2)zc2 = z2 + lc2 sin(θm +θ1 +θ2)
(4)
where θm = θm + π/2, (x1,z1), (xc1,zc1), (x2,z2), and(xc2,zc2) represent the positions of joint 4, the center of massof link 1 of the robot arm, joint 5, and the center of mass oflink 2 of the robot arm, respectively.
The end-effector positions and orientation (xe,ze,qe) aredescribed as
Pe :
xe = x2 + l2 cos(θm +θ1 +θ2)ze = x2 + l2 sin(θm +θ1 +θ2)qe = θm +θ1 +θ2
. (5)
The velocities of the center of mass of link 1 and link 2
are calculated asxc1 = xm− lc1(θm + θ1)sin(θm +θ1)
− lmθm sin(θm)
zc1 = ym + lc1(θm + θ1)cos(θm +θ1)+ lmθm cos
(θm)
vc1 =(x2
c1 + z2c1)1/2
(6)
xc2 = xm− l1(θm + θ1)sin(θm +θ1)− lmθm sin(θm)− lc2(θm + θ1 + θ2)sin(θm +θ1 +θ2)
zc2 = ym + lc1(θm + θ1)cos(θm +θ1)+ lmθm cos(θm)+ lc2(θm + θ1 + θ2)cos(θm +θ1 +θ2)
vc2 =(x2
c2 + z2c2)1/2
(7)
where (xc1, zc1) and (xc2, zc2) represent the velocities the cen-ter of mass of link 1 and link 2 in the X-direction and Z-direction, respectively. vc1 and vc2 denote the total velocitiesof (xc1, zc1) and (xc2, zc2), respectively.
The Jacobian matrix Je is calculated as
Je =dPe
dq=
1 0−l1 sin
(θm +θ1
)− lm sin
(θm)
−l2 sin(θm +θ1 +θ2
)0 1
l1 cos(θm +θ1
)+ lm cos
(θm)
+l2 cos(θm +θ1 +θ2
)0 0 1
−l1 sin(θm +θ1
)−l2 sin
(θm +θ1 +θ2
) −l2 sin(θm +θ1 +θ2
)l1 cos
(θm +θ1
)+l2 cos
(θm +θ1 +θ2
) l2 cos(θm +θ1 +θ2
)1 1
. (8)
For the cable length L, first, the corresponding vectorsshown in Figure 2 are computed as
pm1e =[le/2− lg 0 l f /2
]Tpm2e =
[le/2 0 l f /2− lh
]Tpm3e =
[le/2 0 −l f /2
]Tpm4e =
[−le/2 0 −l f /2
]Tpm5e =
[−le/2 0 l f /2− lh
]Tpm6e =
[−le/2+ lg 0 l f /2
]T(9)
and
pm1 =[xm 0 zm
]T+Ry(θm)
[lb/2 0 lm
]Tpm2 =
[xm 0 zm
]T+Ry(θm)
[la/2 0 lm− lc
]Tpm3 =
[xm 0 zm
]T+Ry(θm)
[ld/2 0 lm− lbd
]Tpm4 =
[xm 0 zm
]T+Ry(θm)
[−ld/2 0 lm− lbd
]Tpm5 =
[xm 0 zm
]T+Ry(θm)
[−la/2 0 lm− lc
]Tpm6 =
[xm 0 zm
]T+Ry(θm)
[−lb/2 0 lm
]T(10)
where pmie (i = 1,2, · · · ,6) and pmi (i = 1,2, · · · ,6) repre-sent the position vectors of the ith cable anchor point on
4

the robot static frame and the ith cable anchor point on themobile platform, respectively. Ry(θm) is the rotation matrixalong the Y-axis (moving frame).
Then, the cable position vector is calculated as
Li = pmie−pmi i = 1,2, · · · ,6. (11)
Finally, the cable length vector is computed as
L =[L1 L2 L3 L4 L5 L6
]T=[‖L1‖ ‖L2‖ ‖L3‖ ‖L4‖ ‖L5‖ ‖L6‖
]T. (12)
The inverse kinematics is calculated by given the vectorof positions and orientation pe =
[xe ze qe
]T ∈ R3 and thecable length vector L =
[L1 L2 · · · L6
]T to find the vector ofjoint variables q =
[xm zm · · · θ2
]T as follows.Suppose the cable lengths L1 and L6 are given and the
kinematic constraints are applied (i.e., L1 = L2 and L5 = L6,then θm = 0). Then, the solutions of xm and zm are computedas
xm =
L21−L2
62(lb−le+2lg)
zm =l f2 − lc + lm± 1
2(lb−le+2lg)((L1−L6 + lb− le +2lg)(L6−L1 + lb− le +2lg)
(L1 +L6 + lb− le +2lg)(L1 +L6− lb + le−2lg))12 .
(13)
Substituting xm, zm, and θm into (1), we can find (x1,z1).Other terms are calculated as
r1e :=
((xe− x1)
2 +(ze− z1)2)1/2
φ := atan2(ze− z1,xe− x1)
α := cos−1(
r21e+l2
1−l22
2r1el1
)β := cos−1
(l21+l2
2−r21e
2l1l2
).
(14)
Finally, two solutions for θ1 and θ2 are computed (using(14)) as
{θ1 = φ∓α−θmθ2 =±(π−β)
(15)
where (14) and (15) are available whether the cable kine-matic constraints are applied or not.
2.3 HCDPR DynamicsIn this paper, a method called equivalent dynamic mod-
eling (EDM) is used to derive the dynamic equations ofthe HCDPR using the following steps: 1) mapping cabletensions (n cables) to the equivalent joint forces/torques (k
DOFs) for the cable-driven robot; 2) derive equivalent m-DOF robot dynamic equations (the attached robot arm has(m− k) DOFs) which include equivalent joint forces/torques(k DOFs); 3) express the corresponding terms of equivalentjoint forces/torques (in the equivalent m-DOF robot dynamicequations obtained in Step 2) in terms of the n cable ten-sions. Then, the analytical dynamic model of the HCDPRwill be introduced. The EDM method has some advantagesof deriving dynamic equations for HCDPRs. For example,it provides an effective solution for different configurationsof HCDPRs. In this paper, the EDM method will be appliedto the planar HCDPR shown in Figure 2. The equivalentdynamic modeling method applied to the planar HCDPR isconducted as follows:
1) An equivalent three-spring driven model shown inAppendix 5 is developed. A cable-tension transformationequation τm = −AT is satisfied and proved, where τm :=[τx,τz,τθ]
T ∈ R3, A ∈ R3×n, and T := [T1,T2, · · · ,Tn]T ∈ Rn
represent the equivalent joint forces/torques applied to themobile platform, the structure matrix A, and the cable ten-sions, respectively.
2) The kinetic and potential energy are calculated as
KE =12
mmx2m +
12
mmz2m +
12
Imθ2m +
12
m1v2c1
+12
I1(θm + θ1
)2+
12
m2v2c2 +
12
I2(θm + θ1 + θ2
)2
(16)
and
PE =mmgzm +m1gzc1 +m2gzc2 +12
kx(xm− xm0)2
+12
kz(zm− zm0)2 +
12
kθ(θm−θm0)2 (17)
where kx, kz, and kθ come from the equivalent three-springdriven model shown in 5, which represent the correspondingspring constants based on Hooke’s law. Also, the expression12 kx(xm− xm0)
2+ 12 kz(zm− zm0)
2+ 12 kθ(θm−θm0)
2 indicatesthe spring potential energy of the equivalent joints.
Then, the Lagrange’s equation is described as
ddt
(∂(KE −PE)
∂q j
)− ∂(KE −PE)
∂q j= τ j j = 1,2, · · · ,5.
(18)
The dynamic equation is computed as
M(q) q+C(q, q) q+G(q)+Pvs (q) = τ (19)
where q ∈ R5, q ∈ R5, and q ∈ R5, represent the vectorsof generalized coordinates, velocities, and accelerations, re-spectively. M(q) ∈ R5×5, C(q, q) ∈ R5×5, G(q) ∈ R5, andPvs(q) ∈ R5 denote the inertia matrix, Coriolis and cen-tripetal matrix, vector of gravitational force, and vector of
5

elastic force, respectively. τ ∈ R5 represents the vector ofgeneralized force. M(q),C(q, q),G(q), and Pvs(q) are pro-vided in Appendix 5.
When an external force Fe and moment Me are appliedto the end-effector, the dynamic equation can be rewritten as
M(q) q+C(q, q) q+G(q)+Pvs (q)+JTe[Fe Me
]T= τ
(20)
where Je is the Jacobian matrix. Here, (19) or (20) is theequivalent HCDPR dynamic equation.
3) For the planar HCDPR, (20) and (50) are rearrangedas
M(q) q+C(q, q) q+G(q)+JTe[Fe Me
]T= τ−Pvs (q) =
τ1−Pvs1τ2−Pvs2τ3−Pvs3
τ4τ5
. (21)
Using (10), (11), and (12), and by supposing Lk =Lk‖Lk‖∈
R3 and rk = (pmi− pm), where i = 1,2, · · · ,6. Then, a matrixA is defined as
A =
L1x · · · L6xL1z · · · L6z[
r1xr1z
]×[
L1xL1z
]· · ·[
r6xr6z
]×[
L6xL6z
] . (22)
Combining (54) and (22), AT is the force and moment(applied at the center of mass of the mobile platform) comingfrom the flexible cables. Based on the Lagrange’s equation(18), τ j ( j = 1,2, . . . ,5) denotes the generalized force/torqueapplied to the dynamic system at joint j to drive link j, butin the specific HCDPR, the mobile platform is driven by sixcables, i.e., there is no direct input (force/torque) applied tothe center of mass of the mobile platform, so τ1 = τ2 = τ3 =0. From (21) and (56), we get
[τ1−Pvs1 τ2−Pvs2 τ3−Pvs3
]T=[−Pvs1 −Pvs2 −Pvs3
]T=−τm = AT. (23)
Then, by combining (21) and (23), the dynamic equationof HCDPR is described as
M(q) q+C(q, q) q+G(q)+JTe[Fe Me
]T=
ATτ4τ5
. (24)
In addition, consider the configuration and constraintsof HCDPR shown in Figure 2. The upper cables and lower
cables are based on position control and force control, re-spectively. Then, the cable tensions T shown in (24) are cal-culated as
T1 =KsL01
(L1−L01)
T2 =KsL02
(L2−L02)
T3 = T3T4 = T4
T5 =KsL05
(L5−L05)
T6 =KsL06
(L6−L06)
(25)
where the unstretched cable lengths are L01 = L02 and L05 =L06 (because of the kinematic constraints), Li (i= 1,2, · · · ,6)are the state of current cable lengths, and Ks is the specificstiffness. Hence, suppose the inputs of the real HCDPR areu =
[L01 T3 T4 L06
]T and τ45 =[τ4 τ5
]T (torques applied tothe revolute joint on the robot arm). Also, the outputs areassumed to be q =
[xm zm θm θ1 θ2
]T , where xm and zm arethe equivalent prismatic joints on the mobile platform; θm isthe equivalent revolute joint on the mobile platform; and θ1and θ2 are the revolute joints on the robot arm.
3 Control DesignBased on the system modeling in Section 2, the redun-
dancy resolution, stiffness optimization problem, and con-troller design will be proposed to address vibration controland trajectory tracking issues.
3.1 Redundancy ResolutionFor the HCDPR shown in Figure 2, the robot is redun-
dant in terms of the number of degrees of freedom (i.e., sixcables drive the 3-DOF mobile platform). Suppose an exter-nal force and moment [Fe,Me]
T are applied to the center ofmass of the mobile platform, we get
T = A+(
mm[0 0 g
]T+[Fe,Me]
T)∈ R6. (26)
By supposing the wrench vector Wm := mm[0 0 g
]T+
[Fe,Me]T ∈ R3, then
T = AT (AAT )−1Wm. (27)
In (27), the elements of T (i.e., cable tensions) mightbe negative. However, in the real system, they cannot drivethe mobile platform if they were negative. The redundancyresolution of the cable tensions T can be formulated as
T = AT (AAT )−1Wm +Null(A)[λ1 λ2 λ3
]T (28)
where T =[T1 T2 · · · T6
]T ∈ R6, Null(A) represents thenull space of structure matrix A (A is calculated using
6

(22), and λ1,λ2,λ3 ∈ R are three arbitrary values. In(28), Null(A)
[λ1 λ2 λ3
]T belongs to the null space of A,
since it can be described as A(
Null(A)[λ1 λ2 λ3
]T)=
(ANull(A))[λ1 λ2 λ3
]T= 0[λ1 λ2 λ3
]T= 0. The expres-
sion Null(A)[λ1 λ2 λ3
]T denotes antagonistic cable ten-sions. The cable tensions T increase if all the antagonisticcable tensions are positive. Hence, the values of λ1,λ2,λ3can be selected to maintain that all the cable tensions arepositive.
By supposing TA := AT(AAT
)−1Wm and NA :=Null(A), then (28) is rearranged as
T = TA +NA[λ1 λ2 λ3
]T (29)
where TA =[TA1 TA2 · · · TA6
]T ∈ R6 and NA =NA11 NA12 NA13NA21 NA22 NA23NA31 NA33 NA33NA41 NA42 NA43NA51 NA52 NA53NA61 NA62 NA63
∈ R6×3. Eq. (29) is introduced to
combine the stiffness maximization method and constraintsin order to optimize cable tensions.
3.2 Maximizing Stiffness of the HCDPRTo calculate the stiffness matrix K for a static cable-
driven robot, first, suppose an external force and moment[Fe,Me]
T are applied to the center of mass of the mobile plat-form. The stiffness matrix K is computed as
K :=d(
mm[0 0 g
]T+[Fe,Me]
T)
dpm=
d(AT)dpm
=dAdpm
T+AdTdpm
=dAdpm
T+A(
dTdL
)(dLdpm
)=
dAdpm
T+AKcAT =: KT +Kk (30)
where pm, T, and L represent the position and orientationof the center of mass of the mobile platform, cable tensionvector, and cable position vector, respectively. Matrices KTand Kk are a product of the cable tensions and cable stiffness,respectively, where Kc =
dTdL = diag(k1,k2, · · · ,ki, · · · ,kn) ∈
Rn×n and ki represents the cable stiffness, i.e., the stiffnesscoefficient of the ith cable. If (30) is expanded in terms ofthe kinematic parameters Li, Li, and ri, the matrices KT andKk can be described as [9, 19]
KT =n
∑i=1
Ti
Li
I− LiLTi
(I− LiLT
i)[ri×]T
[ri×](I− LiLT
i) [ri×]
(I− LiLT
i)[ri×]T
−[Li×
][ri×]T
(31)
and
Kk =n
∑i=1
ki
[LiLT
i LiLTi [ri×]T
[ri×] LiLTi [ri×] LiLT
i [ri×]T]
(32)
where ri =
rixriyriz
, [ri×] =
0 −riz riyriz 0 −rix−riy rix 0
, Li =
LixLiyLiz
,
and[Li×
]=
0 −Liz LiyLiz 0 −Lix−Liy Lix 0
. [ri×] is defined as the
cross product operator, ki is the ith cable stiffness, and I is theidentity matrix. Eq. (31) and (32) are equivalent to the re-sults of the four-spring model proposed by Behzadipour andKhajepour [19]. They also proved that a static cable-drivenrobot is stable if the stiffness matrix K is positive definite(sufficient condition).
The stiffness matrices in (31) and (32) are applied tothe cable-driven robots in 3D. For the HCDPR in this paper,since the upper four cables are utilized for position controland the lower cables are used to set cable tensions, the spe-cific stiffness matrix can be rearranged as
KT =6
∑i=1
Ti
Li
I− LiLTi
(I− LiLT
i)[ri×]T
[ri×](I− LiLT
i) [ri×]
(I− LiLT
i)[ri×]T
−[Li×
][ri×]T
(33)
and
Kk =n
∑i=1,2,5,6
ki
[LiLT
i LiLTi [ri×]T
[ri×] LiLTi [ri×] LiLT
i [ri×]T]
(34)
where riy and Liy equal zero, and ki = Ks/L0i. In addition, el-ements of Kk cannot be controlled, because they come fromthe property of the cables. Hence, the stiffness of HCDPRcan be changed by optimizing KT .
Then, maximizing the stiffness of HCDPR is achievedby the following approach:
1) When the kinematic constraints (L01 = L02 and L05 =L06) are applied, then set the two cable tensions as T1 = T2and T5 = T6. By combining ki = Ks/L0i and (25), we get
{λ1 =
b2c1−b1c2a1b2−a2b1
λ2 =a1c2−a2c1a1b2−a2b1
(35)
where
a1 = NA11−NA21b1 = NA12−NA22c1 = k1 (L1−L2)+TA2−TA1 +(NA23−NA13)λ3a2 = NA51−NA61b2 = NA52−NA62c2 = k5 (L5−L6)+TA6−TA5 +(NA63−NA53)λ3.
(36)
7

Hence, there is only one variable λ3 to optimize, suchthat:
T = TA +NA
[b2c1−b1c2a1b2−a2b1
a1c2−a2c1a1b2−a2b1
λ3
]T. (37)
2) Maximizing any diametric matrix K in (30) pro-vides a unique solution for cable tensions [29] and satisfiesK = g(λ3), where g(·) is a monotonic nondecreasing func-tion. So, maximizing the stiffness K and maximizing λ3are equivalent. Here, the maximum λ3 will maximize theHCDPR’s stiffness K in xm, zm, and θm directions (i.e., inthe directions of X-axis, Z-axis, and rotation about Y-axis).Then, we have
T = λ3DA +EA, DA,EA ∈ R6 (38)
where matrices DA and EA are calculated using (57) and (58)shown in Appendix 5. The solution for (38) can be describedas
λ3 =1
DAiTi−
EAi
DAi, i = 1,2, · · · ,6. (39)
3) The objective function is defined as
maximize λ3 (40a)subject to T = λ3DA +EA (40b)
0≤ Timin ≤ Ti ≤ Timax, i = 1,2, · · · ,6(40c)
where Ti, Timin, and Timax represent the ith cable tension,minimum allowable tension, and maximum allowable ten-sion, respectively. Eq. (40) can be easily solved using solverssuch as CVX [30] to find the optimal value λ3. After λ3 isobtained, the corresponding optimal cable tension T is cal-culated using (38). Compared to the method of stiffnessmaximization in the softest direction in [31], (40) providesa simpler and effective approach. In this research, the abovealgorithm (used to calculate T from (38)) is combined withcontroller design to meet the control objective while simulta-neously satisfying required stiffness along each motion axes.
3.3 Control StrategiesFor the proposed configuration of the HCDPR shown
in Figure 2, four upper cables, two lower cables, and the 2-DOF robot arm are based on position control, force control,and torque control, respectively, i.e., their corresponding in-puts are positions (cable lengths), forces, and joint torques.Furthermore, the elastic cables reduce the overall stiffness ofthe robot, so vibrations become a serious problem for precisecontrol [19, 29, 32]. Another major problem is maintainingcable tensions to keeping large enough stiffness for the robot.As mentioned above, the goal of this paper is to develop an
integrated control system for the HCDPR to reduce vibra-tions and improve motion accuracy and performance. In or-der to achieve this goal, different controllers can be designed,such as PID, LQR, and feed-forward controllers. In the stud-ies, PID-based control strategies are designed to control themotion of the HCDPR.
In addition, for the actual HCDPR system, since thedriven cables are flexible, the positions of the mobile plat-form or actual cable lengths cannot be computed directlyfrom the measurements of encoders (embedded in the cor-responding driven actuators). In this case, the upper cablesare considered as a rigid body with the given cable lengthswhile optimizing the lower cable tensions. In other words,each cable is fitted with a force sensor which provides ten-sion magnitude to the robot feedback control system to en-sure that the HCDPR has the desired stiffness. The controlstrategy includes tracking the motions of the mobile platformand the robot arm as well as optimizing the cable tensions tosatisfy the required stiffness of the robot.
Based on the above method, the proposed control struc-tures of the HCDPR are shown in Figure 3. Figure 3(a)shows the desired inputs being cable lengths (L1,L6) androbot arm joint variables (θ1,θ2). In this case, the goal isto control the rigid HCDPR for the desired (L1,L6) usingPID controller I and the desired (θ1,θ2) using PID controllerII, respectively. Figure 3(b) represents the desired inputs asjoint variables q = (xm,zm,θm,θ1,θ2). In this case, suppose(xm,zm,θm) (i.e., Pm(xm,zm,θm)) is given (e.g., using exter-nal cameras to track the trajectories). In the control scheme,the corresponding PID controllers continuously calculate er-rors as the difference between the desired and actual values.The controllers’ outputs are then used to command the ca-bles and the robot arm actuators to drive the HCDPR. Also,the optimal cable tensions are obtained using (38).
The HCDPR system with position controllers developedis shown in Figure 3(a) and Figure 3(b). The system consistsof the system dynamics in Section 2, the redundancy resolu-tion derived in Subsection 3.1, and the stiffness maximiza-tion approach proposed in Subsection 3.2.
Defining an error vector e(t) for the controllers above as
e(t) =
[L1(t) L6(t)]T − [L1(t) L6(t)]T PID controller I[θ1(t) θ2(t)]T − [θ1(t) θ2(t)]T PID controller IIq(t)− q(t)
(41)
where ˜(·) denotes actual values. Based on the diagram shownin Figure 3, the control law is designed as
[um(t)ua(t)
]= Kpe(t)+Ki
∫ t
0e(t)dt +Kd
de(t)dt
(42)
where Kp, Ki, and Kd are the proportional, integral, andderivative terms, respectively. um and ua represent controlinputs to the mobile platform and robot arm, respectively.
8

τ45
Reference
Reference
PID
controller I
PID
controller II
Forward
kinematics
+
-+
-
uStiffness
maximization
HCDPR
PID controller
Redundant resolution
and stiffness
maximizationReference-
+
HCDPR
(a)
(b)
[xm,zm,θm,θ1,θ2]T
[θ1,θ2]T
[L1,L6]T
um
ua
u
τ45
um
ua
Fig. 3. Control structures of the HCDPR. (a) The desired inputs are cable lengths and robot arm joint variables; (b) The desired inputs arejoint variables.
4 Numerical Results and DiscussionTo evaluate the control performance in Section 3, the
following cases will be studied. All the scenarios are im-plemented using MATLAB 2019a (The MathWorks, Inc.)on a Windows 7 x64 desktop PC (Inter Core i7-4770, 3.4GHz CPU and 8 GB RAM), and the initial condition isq0 = [0,0,0,0,0]T .
Case 1: Control the CDPR by Given Cable Lengths(L1,L6)
In the first case, assume L1,L6,θ1, and θ2 are obtainedfrom the actuators encoders. The PID controller I is applied(parameters are set as Kp = 2× 102,Ki = 10, and Kd = 0)to control the upper cables, where L1 = 1.35 m and L6 =1.35 m. Meanwhile, the PID controller II is applied (param-eters are set as Kp = 6×102,Ki = 20, and Kd = 1×102) tocontrol the robot arm, and the desired joint variables [θ1,θ2]are equal to [0,0]. This means that it is desired to maintainthe robot arm stationary. The results in Figure 4(a) and Fig-ure 4(b) show that the vibrations are not damped out usingthe proposed PID controllers.
Case 2: Control the CDPR by Given Pm(xm,zm,θm)
In this case, suppose Pm(xm,zm,θm) (i.e., (xm,zm,θm)measurements are available (e.g., vision based feed-back). When the PID controller is applied (Kp = 5 ×105,Ki = 3.5× 107, and Kd = 1.1× 104), the desired po-sitions of the mobile platform [xm,zm,θm,θ1,θ2] are set to[2×10−3,4×10−3,0,0,0]. The corresponding results areshown in Figure 5(a), Figure 5(b), and Figure 5(c). The re-sults show that the errors between the desired input q and theactual output q go to zero very quickly (about 0.3 seconds),and the dynamic inputs (cable lengths, cable tensions, androbot arm joint torques) applied to the HCDPR are quick tostabilize. In this case, the states of the upper cable tensionsstabilize at the set point in less than 0.3 seconds. In addition,
(a) (b)
Fig. 4. Responses of Case 1. (a) Errors between the desired inputsand the actual outputs and (b) trajectories of the center of mass ofthe mobile platform and the end-effector.
it is clear that the vibrations are well controlled when the PIDcontroller is applied.
In summary, based on the results from case 1 and case 2,when the desired L1, L6, θ1, and θ2 are given, vibrations inactual positions of all degrees of freedom need to be dampedout (or controlled better).
Case 3(a): The Mobile Platform is Fixed and the RobotArm is Moving
In this case, the mobile platform is fixed (the cablelengths (L1,L6) are given) and the robot arm is moving.Also, PID controller I (Kp = 2× 102,Ki = 10, and Kd = 0)is applied to control the upper cables and PID controller II
9

(a) (b)
(c)
Fig. 5. Responses of Case 2. (a) Errors between the desired inputq and the actual output q, (b) the dynamic inputs (cable lengths,cable tensions, and robot arm joint torques) applied to the HCDPRand the states of the upper cable tensions, and (c) trajectories of thecenter of mass of the mobile platform and the robot arm end-effector.
(Kp = 6× 102,Ki = 20, and Kd = 1× 102) is applied to therobot arm. The desired trajectories are defined as
L1 = L6 = 1.35θ1 = 0.1t, t ∈ [0, tmax]θ2 = 0.1t, t ∈ [0, tmax]
(43)
where t and tmax are the current and maximum running time.The corresponding results are shown in Figure 6(a) and
Figure 6(b). The results also show that tracking errors arenot acceptable, and vibrations are not controlled with nearsustained oscillations in cables L1 and L6.
Case 3(b): The Robot Arm is Fixed and the Mobile Plat-form is Moving
In this case, the robot arm is fixed and the mobile plat-form is moving. This is the same as in Case 3(a), PIDcontroller I (Kp = 2× 102,Ki = 10, and Kd = 0) is appliedto control the upper cables and PID controller II (Kp =
(a) (b)
Fig. 6. Responses of Case 3(a). (a) Errors between the desiredinputs and the actual outputs and (b) trajectories of the center ofmass of the mobile platform and the end-effector.
6× 102,Ki = 20, and Kd = 1× 102) is applied to the robotarm. The desired trajectories are given by
L1 = 1.35−0.01t, t ∈ [0, tmax]L6 = 1.35+0.01t, t ∈ [0, tmax]θ1 = 0θ2 = 0
(44)
where t and tmax are the current and maximum running time.In this case, the results are shown in Figure 7(a) and
Figure 7(b). The results again show that tracking errors arenot satisfactory and vibrations are not damped out using thetwo PID controllers.
Case 4(a): The Mobile Platform is Fixed and the RobotArm is Moving
In this case, the mobile platform is fixed and the robotarm is moving, i.e., the robot arm moves from one pointto another. When the PID controller is applied (Kp = 5×105,Ki = 3.5×107, and Kd = 1.1×104), the desired trajec-tories of the mobile platform are described as
xm = 0zm = 0θm = 0θ1 = t, t ∈ [0, tmax]θ2 =−t, t ∈ [0, tmax]
(45)
where t and tmax are the current and maximum running time.The corresponding results are shown in Figure 8(a), Fig-
ure 8(b), and Figure 8(c). The results show that the errors be-tween the desired input q and the actual output q go to zerovery quickly, and the dynamic inputs applied to the HCDPR
10

(a) (b)
Fig. 7. Responses of Case 3(b). (a) Errors between the desiredinputs and the actual outputs and (b) trajectories of the center ofmass of the mobile platform and the end-effector.
are quick to stabilize. Moreover, although the mobile plat-form remains stationary and only the robot arm moves fromone point to another in the joint coordinate frame, the robotarm motion still generates reaction forces/moments which inturn create oscillations on the mobile platform. The states ofthe upper cable tensions are stabilized in less than 0.2 sec-onds. Because of the action of the PID controller, vibrationsof the HCDPR are well controlled in this case.
Case 4(b): The Robot Arm is Fixed and the Mobile Plat-form is Moving
In this case, the robot arm is fixed and the mobile plat-form is moving. When the PID controller is applied (Kp =5×105,Ki = 3.5×107, and Kd = 1.1×104), the desired tra-jectories of the mobile platform are as follows
xm =−0.1t, t ∈ [0, tmax]zm =−0.05t, t ∈ [0, tmax]θm = 0θ1 = 0θ2 = 0
(46)
where t and tmax are the current and maximum running time.The results are shown in Figure 9(a), Figure 9(b), and
Figure 9(c). The results show that the errors between thedesired input q and the actual output q go to zero in about0.25 seconds. The dynamic inputs (cable lengths, cable ten-sions, and robot arm joint torques) applied to the HCDPR arealso quick to stabilize. Meanwhile, cable tensions T3 and T4are always positive since the algorithm for maximizing thestiffness of HCDPR is applied. In this case, the upper ca-ble tensions reach the set values in about 0.2 seconds. Thetracking trajectory errors of the center of mass of the mobile
(a) (b)
(c)
Fig. 8. Responses of Case 4(a). (a) Errors between the desiredinput q and the actual output q, (b) the dynamic inputs (cable lengths,cable tensions, and arm joint torques) applied to the HCDPR and thestates of the upper cable tensions, and (c) trajectories of the centerof mass of the mobile platform and the end-effector.
platform shown in Figure 9(c) are very small. In addition,when the proposed PID controller is implemented, the vibra-tions of the HCDPR are well controlled.
In summary, redundancy resolution and stiffness opti-mization methods for the HCDPR were introduced. PID-based controllers are also designed for position control ofthe HCDPR system. The performance of the HCDPR us-ing the position PID controllers is analyzed via different sce-narios: when the positions/orientations of the mobile plat-form and the end-effector positions of the rigid robot arm (orjoint variables) are given, the trajectory tracking and vibra-tion suppression can be well handled.
5 ConclusionsThis paper proposed a kinematically constrained planar
HCDPR which can harness the strengths and benefits of se-rial and cable-driven parallel robots. Based on this HCDPR,kinematics, dynamics, redundancy resolution and stiffnessmaximization algorithms were developed. Controllers (I and
11

(a) (b)
(c)
Fig. 9. Responses of Case 4(b). (a) Errors between the desiredinput q and the actual output q, (b) the dynamic inputs (cable lengths,cable tensions, and robot arm joint torques) applied to the HCDPRand the states of the upper cable tensions, and (c) trajectories of thecenter of mass of the mobile platform and the end-effector.
II) were also designed to address trajectory tracking and vi-bration suppression problems. Control performance was an-alyzed by using different scenarios, and the results showedthat the controller II can achieve the goal better. Besides,compared to the existing research, this paper showed the re-action performance, i.e., the mobile platform was fixed andthe robot arm was moving or the mobile platform was fixedand the robot arm is moving, as well as the trajectory track-ing of the end-effector, and both results were satisfactory.
AcknowledgmentThe authors would like to knowledge the financial sup-
port of the Natural Sciences and Engineering ResearchCouncil of Canada (NSERC).
Appendix A: HCDPR DerivationsThe terms in (19) are computed as follows:
M(q) =
M11 M12 M13 M14 M15M21 M22 M23 M24 M25M31 M32 M33 M34 M35M41 M42 M43 M44 M45M51 M52 M53 M54 M55
, C(q, q) =
C11 C12 C13 C14 C15C21 C22 C23 C24 C25C31 C32 C33 C34 C35C41 C42 C43 C44 C45C51 C52 C53 C54 C55
, G(q) =
G1G2G3G4G5
, and
Pvs(q) =[Pvs1 Pvs2 Pvs3 0 0
]T , in whichM11 = m1 + m2 + mm, M21 = 0, M31 =−lmm1 sin(θm) − lmm2 sin(θm) − lc2m2 sin(θm +θ1 +θ2) −l1m2 sin(θm +θ1) − lc1m1 sin(θm +θ1), M41 =−lc2m2 sin(θm +θ1 +θ2) − l1m2 sin(θm +θ1) −lc1m1 sin(θm +θ1), M51 = −lc2m2 sin(θm +θ1 +θ2),M12 = 0, M22 = m1 + m2 + mm, M32 =lmm1 cos(θm) + lmm2 cos(θm) + lc2m2 cos(θm +θ1 +θ2) +l1m2 cos(θm +θ1) + lc1m1 cos(θm +θ1), M42 =lc2m2 cos(θm +θ1 +θ2) + l1m2 cos(θm +θ1) +lc1m1 cos(θm +θ1), M52 = lc2m2 cos(θm +θ1 +θ2),M13 = −m2(l1 sin(θm +θ1) + lm sin(θm) +lc2 sin(θm +θ1 +θ2)) − m1(lc1 sin(θm +θ1)+ lm sin(θm)),M23 = m2(l1 cos(θm +θ1) + lm cos(θm) +lc2 cos(θm +θ1 +θ2)) + m1(lc1 cos(θm +θ1) +lm cos(θm)), M33 = I1 + I2 + Im + l12m2 + lc1
2m1 +lc2
2m2 + lm2m1 + lm2m2 + 2lc2lmm2 cos(θ1 +θ2) +2l1lc2m2 cos(θ2) + 2l1lmm2 cos(θ1) + 2lc1lmm1 cos(θ1),M43 = m2l12 +2m2 cos(θ2)l1lc2 + lmm2 cos(θ1)l1 +m1lc1
2 +lmm1 cos(θ1)lc1 + m2lc2
2 + lmm2 cos(θ1 +θ2)lc2 + I1 + I2,M53 = I2 + lc2
2m2 + lc2lmm2 cos(θ1 +θ2) + l1lc2m2 cos(θ2),M14 = −m2(l1 sin(θm +θ1)+ lc2 sin(θm +θ1 +θ2)) −lc1m1 sin(θm +θ1), M24 = m2(l1 cos(θm +θ1) +lc2 cos(θm +θ1 +θ2)) + lc1m1 cos(θm +θ1), M34 =m2l12 + 2m2 cos(θ2)l1lc2 + lmm2 cos(θ1)l1 + m1lc1
2 +lmm1 cos(θ1)lc1 + m2lc2
2 + lmm2 cos(θ1 +θ2)lc2 + I1 + I2,M44 = m2l12 + 2m2 cos(θ2)l1lc2 +m1lc1
2 +m2lc22 + I1 + I2,
M54 = m2lc22 + l1m2 cos(θ2)lc2 + I2, M15 =
−lc2m2 sin(θm +θ1 +θ2), M25 = lc2m2 cos(θm +θ1 +θ2),M35 = I2 + lc2
2m2 + lc2lmm2 cos(θ1 +θ2) + l1lc2m2 cos(θ2),M45 = m2lc2
2 + l1m2 cos(θ2)lc2 + I2, M55 = lc22m2 + I2,
C11 = 0, C12 = 0, C13 = −θm(m2(l1 cos(θm + θ1) +lm cos(θm)+ lc2 cos(θm + θ1 + θ2))+m1(lc1 cos(θm + θ1)+lm cos(θm))), C14 = −(2θm + θ1)(lc2m2 cos(θm +θ1 +θ2)+l1m2 cos(θm +θ1) + lc1m1 cos(θm +θ1)), C15 =−lc2m2 cos(θm+θ1+θ2)(2θm+2θ1+ θ2), C21 = 0, C22 = 0,C23 = −θm(m2(l1 sin(θm + θ1) + lm sin(θm) + lc2 sin(θm +θ1 + θ2)) + m1(lc1 sin(θm + θ1) + lm sin(θm))), C24 =−(2θm + θ1)(lc2m2 sin(θm +θ1 +θ2) + l1m2 sin(θm +θ1) +lc1m1 sin(θm + θ1)), C25 = −lc2m2 sin(θm + θ1 + θ2)(2θm +2θ1 + θ2), C31 = 0, C32 = 0, C33 = 0, C34 = −lm(2θm +θ1)(l1m2 sin(θ1) + lc1m1 sin(θ1) + lc2m2 sin(θ1 +θ2)),C35 = −lc2m2(lm sin(θ1 +θ2)+ l1 sin(θ2))(2θm +2θ1 + θ2),C41 = 0, C42 = 0, C43 =lmθm(l1m2 sin(θ1)+ lc1m1 sin(θ1)+ lc2m2 sin(θ1 +θ2)),C44 = 0, C45 = −l1lc2m2 sin(θ2)(2θm +2θ1 + θ2), C51 = 0,C52 = 0, C53 = lc2m2θm(lm sin(θ1 +θ2)+ l1 sin(θ2)),
12

C54 = l1lc2m2 sin(θ2)(2θm + θ1), C55 = 0, G1 = 0, G2 =(m1 +m2 +mm)g, G3 = m1glm cos(θm) + m2glm cos(θm) +m2glc2 cos(θm +θ1 +θ2) + m2gl1 cos(θm +θ1) +m1glc1 cos(θm +θ1), G4 = m2gl1 cos(θm +θ1) +m1glc1 cos(θm +θ1) + m2glc2 cos(θm +θ1 +θ2),G5 = m2glc2 cos(θm +θ1 +θ2), Pvs1 = kx(xm− xm0),Pvs2 = kz(zm− zm0), Pvs3 = kθ(θm−θm0), Pvs4 = 0, Pvs5 = 0.
Appendix B: Equivalent Cable-Driven ModelTheorem 1. Assume an external force and moment[Fe,Me]
T ∈ R3 are applied to the mobile platform in a 2DCDPR (shown in Figure 10), then the equation τm = −ATwill be satisfied. In this equation, τm := [τx,τz,τθ]
T ∈ R3,A ∈ R3×n, and T := [T1,T2, · · · ,Tn]
T ∈ Rn represent theequivalent joint forces/torques applied to the mobile plat-form, the structure matrix A, and the cable tensions, respec-tively. In Figure 10(b), suppose τx,τz, and τθ always parallelaxes OX0, OZ0, and OY0, respectively.
r1
O
Z0
X0
Y0
...
Fe
Mern
Cable i
Mobile
platform
(mm,Im)
(Ln,kn)
rir2
pmp
ai
bi
(b)(a)
O
Z0
X0
Y0
Fe
Me
Equivalent
spring
Mobile
platform
(mm,Im)
(xm,τx,kx)
pmp
(zm,τz,kz)
(θm,τθ ,kθ )
g g
Tn T1
(Li,ki)
Ti
(L2,k2)
T2
(L1,k1)
Fig. 10. An equivalent three-spring driven model for a 2D flexibleCDPR. (a) A 2D flexible CDPR; (b) an equivalent three-spring drivenmodel.
Proof. Suppose an external force and moment [Fe,Me]T ∈
R3 are applied to the mobile platform (as shown in Fig-ure 10(a) and Figure 10(b)) and generate the same posi-tion and orientation accelerations
[xm, zm, θm
]T . Using theNewton-Euler formula, the following equations can be de-rived.
For the model shown in Figure 10(a), we have
n
∑i=1
Ti +Fe +
[0
mmg
]=
[mmxmmmzm
]−
n
∑i=1
(LiTi
)=
[mmxmmmzm
]−[
0mmg
]−Fe (47)
where Li denotes the unit cable vector. Furthermore,
n
∑i=1
(ri×Ti)+Me = Imθm
−n
∑i=1
((ri× Li
)Ti)= Imθm−Me (48)
Combining (47) and (48), we get
−n
∑i=1
{[Li
ri× Li
]Ti
}=
mmxmmmzmImθm
− 0
mmg0
−[FeMe
](49)
For the model shown in Figure 10(b), we also have
[τxτz
]=
[mmxmmmzm
]−[
0mmg
]−Fe (50)
and
τθ = Imθm−Me (51)
Combining (50) and (51), we get
τxτzτθ
=
mmxmmmzmImθm
− 0
mmg0
−[FeMe
](52)
Clearly, the right sides of (49) and (52) are equal, so
τxτzτθ
=−n
∑i=1
{[Li
ri× Li
]Ti
}(53)
Eq. (53) is expanded as
τm =−[
L1 L2 · · · Li · · · Ln
r1× L1 r2× L2 · · · ri× Li · · · rn× Ln
]︸ ︷︷ ︸
A
T (54)
where Li =[Lix, Liz
]T ∈ R2, ri = [rix,riz]T ∈ R2, and T =[
T1 T2 · · · Ti · · · Tn]T ∈ Rn. Hence, we get
τm =−AT (55)
where A represents a structure matrix, determined by the po-sition and orientation of the mobile platform.
Furthermore, τm is satisfied with τm = [τx,τz,τθ]T =
[kx (xm− xm0) ,kz (zm− zm0) ,kθ (θm−θm0)]T , where
kx,kz,kθ ∈ R denote equivalent spring constants (parallel
13

the X-axis, Z-axis, and rotation about Y-axis, respectively),(xm,zm,θm) and (xm0,zm0,θm0) represent the current andinitial positions and orientation of the mobile platform,respectively. For the six-cable HCDPR shown in Figure 2.Then, we also get
AT =−τm =−[kx (xm− xm0) ,kz (zm− zm0) ,kθ (θm−θm0)]T
(56)
Besides, suppose Ti ={ki(Li−L0i)Ti
input is the ith cable lengthinput is the ith cable tension . It is clear that
(55) is available to the cable position (cable length) control,force (cable tension) control, and hybrid cable position/forcecontrol.
Appendix C: Derivations of the Maximizing Stiffness ofthe HCDPR
DA =[DA1 DA2 DA3 DA4 DA5 DA6
]T (57)
where
DA1 = NA13
− NA12((NA11−NA21)(NA53−NA63)−(NA13−NA23)(NA51−NA61))(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
+ NA11((NA12−NA22)(NA53−NA63)−(NA13−NA23)(NA52−NA62))(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
DA2 = NA23
− NA22((NA11−NA21)(NA53−NA63)−(NA13−NA23)(NA51−NA61))(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
+ NA21((NA12−NA22)(NA53−NA63)−(NA13−NA23)(NA52−NA62))(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
DA3 = NA33
− NA32((NA11−NA21)(NA53−NA63)−(NA13−NA23)(NA51−NA61))(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
+ NA31((NA12−NA22)(NA53−NA63)−(NA13−NA23)(NA52−NA62))(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
DA4 = NA43
− NA42((NA11−NA21)(NA53−NA63)−(NA13−NA23)(NA51−NA61))(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
+ NA41((NA12−NA22)(NA53−NA63)−(NA13−NA23)(NA52−NA62))(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
DA5 = NA53
− NA52((NA11−NA21)(NA53−NA63)−(NA13−NA23)(NA51−NA61))(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
+ NA51((NA12−NA22)(NA53−NA63)−(NA13−NA23)(NA52−NA62))(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
DA6 = NA63
− NA62((NA11−NA21)(NA53−NA63)−(NA13−NA23)(NA51−NA61))(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
+ NA61((NA12−NA22)(NA53−NA63)−(NA13−NA23)(NA52−NA62))(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
EA =[EA1 EA2 EA3 EA4 EA5 EA6
]T (58)
where
EA1 = TA1 +NA12(NA11−NA21)(TA6−TA5+k5(L5−L6))
(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
− NA12(NA51−NA61)(TA2−TA1+k1(L1−L2))(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
− NA11(NA12−NA22)(TA6−TA5+k5(L5−L6))(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
+ (NA11(NA52−NA62)(TA2−TA1+k1(L1−L2)))(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
EA2 = TA2 +NA22((NA11−NA21)(TA6−TA5+k5(L5−L6)))
(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
− NA22((NA51−NA61)(TA2−TA1+k1(L1−L2)))(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
− NA21((NA12−NA22)(TA6−TA5+k5(L5−L6)))(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
+ NA21((NA52−NA62)(TA2−TA1+k1(L1−L2)))(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
EA3 = TA3 +NA32((NA11−NA21)(TA6−TA5+k5(L5−L6)))
(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
− NA32((NA51−NA61)(TA2−TA1+k1(L1−L2)))(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
− NA31((NA12−NA22)(TA6−TA5+k5(L5−L6)))(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
+ NA31((NA52−NA62)(TA2−TA1+k1(L1−L2)))(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
EA4 = TA4 +NA42((NA11−NA21)(TA6−TA5+k5(L5−L6)))
(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
− NA42((NA51−NA61)(TA2−TA1+k1(L1−L2)))(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
− NA41((NA12−NA22)(TA6−TA5+k5(L5−L6)))(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
+ NA41((NA52−NA62)(TA2−TA1+k1(L1−L2)))(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
EA5 = TA5 +NA52((NA11−NA21)(TA6−TA5+k5(L5−L6)))
(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
− NA52((NA51−NA61)(TA2−TA1+k1(L1−L2)))(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
− NA51((NA12−NA22)(TA6−TA5+k5(L5−L6)))(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
+ NA51((NA52−NA62)(TA2−TA1+k1(L1−L2)))(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
EA6 = TA6 +NA62((NA11−NA21)(TA6−TA5+k5(L5−L6)))
(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
− NA62((NA51−NA61)(TA2−TA1+k1(L1−L2)))(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
− NA61((NA12−NA22)(TA6−TA5+k5(L5−L6)))(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
+ NA61((NA52−NA62)(TA2−TA1+k1(L1−L2)))(NA11−NA21)(NA52−NA62)−(NA12−NA22)(NA51−NA61)
References[1] Wei, H., Qiu, Y., and Yang, J., 2015. “An Approach
to Evaluate Stability for Cable-Based Parallel Cam-era Robots with Hybrid Tension-Stiffness Properties”.International Journal of Advanced Robotic Systems,12(12), pp. 185:1–185:12.
[2] Dudarev, A., 2016. “The Problem SensitizationRobotic Complex Drilling and Milling of SandwichShells of Polymer Composites”. In Proceedings of the4th International Conference on Applied Innovations inIT, Vol. 4, pp. 15–19.
[3] Stewart, D., 1965. “A Platform with Six Degrees ofFreedom”. Proceedings of the Institution of Mechani-cal Engineers, 180(1), pp. 371–386.
[4] Dagalakis, N. G., Albus, J. S., et al., 1989. “StiffnessStudy of a Parallel Link Robot Crane for ShipbuildingApplications”. Journal of Offshore Mechanics and Arc-tic Engineering, 111, Aug, pp. 183–193.
14

[5] Albus, J., Bostelman, R., and Dagalakis, N., 1992.“The NIST SPIDER, A Robot Crane”. Journal of Re-search of the National Institute of Standards and Tech-nology, 97(3), May-Jun, p. 373–385.
[6] Hiller, M., Fang, S., Mielczarek, S., Verhoeven, R., andFranitza, D., 2005. “Design, analysis and realization oftendon-based parallel manipulators”. Mechanism andMachine Theory, 40(4), pp. 429–445.
[7] Yeo, S. H., Yang, G., and Lim, W. B., 2013. “Designand analysis of cable-driven manipulators with vari-able stiffness”. Mechanism and Machine Theory, 69,pp. 230–244.
[8] Khajepour, A., and Mendez, S. T. Apparatus for con-trolling a mobile platform. U.S. Patent 14,613,450,Feb. 4, 2015.
[9] Mendez, S. J. T., 2014. “Low Mobility Cable Robotwith Application to Robotic Warehousing”. PhD thesis,University of Waterloo, Waterloo, ON, Canada.
[10] Oh, S., and Agrawal, S. K., 2005. “Cable suspendedplanar robots with redundant cables: controllers withpositive tensions”. IEEE Transactions on Robotics,21(3), June, pp. 457–465.
[11] Albus, J. S. Cable Arrangement and Lifting Platformfor Stabilized Load Lifting. U.S. Patent 4,883,184,Nov. 28, 1989.
[12] VINCENT, T. L., 2008. “Stabilization for film andbroadcast cameras [applications of control]”. IEEEControl Systems Magazine, 28(1), Feb, pp. 20–25.
[13] Gouttefarde, M. Analysis and Synthesis of Large-Dimension Cable-Driven Parallel Robots. HabilitationA Diriger Des Recherches, Academie De Montpellier,2016.
[14] Arai, T., Matsumura, S., et al., 1999. “A proposal fora wire suspended manipulator: A kinematic analysis”.Robotica, 17(1), p. 3–9.
[15] Osumi, H., Utsugi, Y., and Koshikawa, M., 2000. “De-velopment of a manipulator suspended by parallel wirestructure”. In Proceedings of 2000 IEEE/RSJ Interna-tional Conference on Intelligent Robots and Systems,pp. 498–503.
[16] Bamdad, M., Taheri, F., and Abtahi, N., 2015. “Dy-namic analysis of a hybrid cable-suspended planar ma-nipulator”. In 2015 IEEE International Conference onRobotics and Automation, pp. 1621–1626.
[17] Gouttefarde, M., 2017. “Static Analysis of Planar3-DOF Cable-Suspended Parallel Robots Carrying aSerial Manipulator”. In New Trends in Mechanismand Machine Science, P. Wenger and P. Flores, eds.,Springer International Publishing, pp. 363–371.
[18] Albus, J. S., Bostelman, R. V., and Jacoff, A. S. Modu-lar Suspended Manipulator. U.S. Patent 6,566,834 B1,May 20, 2003.
[19] Behzadipour, S., and Khajepour, A., 2006. “Stiffnessof Cable-based Parallel Manipulators With Applicationto Stability Analysis”. ASME Journal of Mechanical
Design, 128(1), Jan, pp. 303–310.[20] Azadi, M., Behzadipour, S., and Faulkner, G., 2009.
“Antagonistic variable stiffness elements”. Mechanismand Machine Theory, 44(9), pp. 1746–1758.
[21] Gosselin, C., 1990. “Stiffness mapping for parallel ma-nipulators”. IEEE Transactions on Robotics and Au-tomation, 6(3), June, pp. 377–382.
[22] Griffis, M., and Duffy, J., 1993. “Global stiffness mod-eling of a class of simple compliant couplings”. Mech-anism and Machine Theory, 28(2), pp. 207–224.
[23] Qi, R., Khajepour, A., and Melek, W. W., 2019. “Mod-eling, tracking, vibration and balance control of an un-deractuated mobile manipulator (UMM)”. Control En-gineering Practice, 93, p. 104159.
[24] Qi, R., Khajepour, A., and Melek, W. W., 2019. Gen-eralized Flexible Hybrid Cable-Driven Robot (HCDR):Modeling, Control, and Analysis. arXiv:1911.06222.
[25] Jamshidifar, H., 2018. “Integrated Trajectory-Trackingand Vibration Control of Kinematically-ConstrainedWarehousing Cable Robots”. PhD thesis, Universityof Waterloo, Waterloo, ON, Canada.
[26] Market Research Engine, 2018. Automated MaterialHandling Equipment Market By Product Analysis; BySystem Type Analysis; By Software & Services Anal-ysis; By Function Analysis; By Industry Analysis andBy Regional Analysis–Global Forecast by 2018-2024,Nov. Market Research Engine Report.
[27] Rushton, M., 2016. “Vibration Control in Cable RobotsUsing a Multi-Axis Reaction System”. Master’s thesis,University of Waterloo, Waterloo, ON, Canada.
[28] Qi, R., Rushton, M., Khajepour, A., and Melek, W. W.,2019. “Decoupled modeling and model predictive con-trol of a hybrid cable-driven robot (HCDR)”. Roboticsand Autonomous Systems, 118, pp. 1–12.
[29] Meunier, G., Boulet, B., and Nahon, M., 2009. “Con-trol of an Overactuated Cable-Driven Parallel Mecha-nism for a Radio Telescope Application”. IEEE Trans-actions on Control Systems Technology, 17(5), Sep.,pp. 1043–1054.
[30] Grant, M. C., and Boyd, S. P., 2008. “Graph Implemen-tations for Nonsmooth Convex Programs”. In RecentAdvances in Learning and Control, V. D. Blondel, S. P.Boyd, and H. Kimura, eds., Springer London, pp. 95–110.
[31] Jamshidifar, H., Khajepour, A., Fidan, B., and Rush-ton, M., 2017. “Kinematically-Constrained RedundantCable-Driven Parallel Robots: Modeling, RedundancyAnalysis, and Stiffness Optimization”. IEEE/ASMETransactions on Mechatronics, 22(2), April, pp. 921–930.
[32] Rushton, M., and Khajepour, A., 2016. “Optimal actu-ator placement for vibration control of a planar cable-driven robotic manipulator”. In 2016 American ControlConference (ACC), pp. 3020–3025.
15

![A GENERAL ALGORITHM FOR COMPENSATION OF TRAJECTORY … · 2018-02-21 · arXiv:1802.01012v2 [physics.med-ph] 9 Feb 2018 A GENERAL ALGORITHM FOR COMPENSATION OF TRAJECTORY ERRORS:](https://img.pdfslide.us/doc/110x75/5f3b368fe6ca0e736e284bce/a-general-algorithm-for-compensation-of-trajectory-2018-02-21-arxiv180201012v2.jpg)

![arXiv:1609.02341v1 [nucl-th] 8 Sep 2016 · arXiv:1609.02341v1 [nucl-th] 8 Sep 2016 Quasi-particle random phase approximation with quasi-particle-vibration coupling: application to](https://img.pdfslide.us/doc/110x75/5f0d373f7e708231d4393e39/arxiv160902341v1-nucl-th-8-sep-2016-arxiv160902341v1-nucl-th-8-sep-2016.jpg)




![arXiv:1909.13258v2 [cs.CV] 18 Jan 2020arXiv:1909.13258v2 [cs.CV] 18 Jan 2020 large distance implies a foreground object(s). Trajectory epipolar distances, capture temporally global](https://img.pdfslide.us/doc/110x75/5f3d5a94a5387b423769436b/arxiv190913258v2-cscv-18-jan-2020-arxiv190913258v2-cscv-18-jan-2020-large.jpg)

![Detection via simultaneous trajectory estimation and long time … · 2019-04-23 · arXiv:1709.00310v3 [cs.SY] 21 Apr 2019 1 Detection via simultaneous trajectory estimation and](https://img.pdfslide.us/doc/110x75/5e932f865dc68822cb258d24/detection-via-simultaneous-trajectory-estimation-and-long-time-2019-04-23-arxiv170900310v3.jpg)
![arXiv:2004.02025v1 [cs.CV] 4 Apr 2020 · It Is Not the Journey but the Destination: Endpoint Conditioned Trajectory Prediction Karttikeya Mangalam 1, Harshayu Girase , Shreyas Agarwal](https://img.pdfslide.us/doc/110x75/5f21a92b5e12a81d872fc1a6/arxiv200402025v1-cscv-4-apr-2020-it-is-not-the-journey-but-the-destination.jpg)

![arXiv:2007.03639v2 [cs.CV] 24 Jul 2020 · arXiv:2007.03639v2 [cs.CV] 24 Jul 2020 Figure 1: Human trajectory forecasting is the task of forecasting the future trajectories (dashed)](https://img.pdfslide.us/doc/110x75/60234e567e93954f1362dfd3/arxiv200703639v2-cscv-24-jul-2020-arxiv200703639v2-cscv-24-jul-2020-figure.jpg)
![Securing UAV Communications via Joint Trajectory …arXiv:1801.06682v2 [cs.IT] 31 Dec 2018 1 Securing UAV Communications via Joint Trajectory and Power Control Guangchi Zhang, Member,](https://img.pdfslide.us/doc/110x75/5e95a9e2a9423832a713f0c3/securing-uav-communications-via-joint-trajectory-arxiv180106682v2-csit-31-dec.jpg)
![arXiv:0904.0865v1 [physics.optics] 6 Apr 2009 · arXiv:0904.0865v1 [physics.optics] 6 Apr 2009 A vibration-insensitive optical cavity and absolute determination of its ultrahigh stability](https://img.pdfslide.us/doc/110x75/600781f2571b1034850ead1a/arxiv09040865v1-6-apr-2009-arxiv09040865v1-6-apr-2009-a-vibration-insensitive.jpg)

![arXiv:2003.11476v1 [cs.CV] 25 Mar 2020 · PiP: Planning-informed Trajectory Prediction for Autonomous Driving Haoran Song 1, Wenchao Ding , Yuxuan Chen2, Shaojie Shen , Michael Yu](https://img.pdfslide.us/doc/110x75/6059aa1fa168587ff664da45/arxiv200311476v1-cscv-25-mar-2020-pip-planning-informed-trajectory-prediction.jpg)