-
7/31/2019 Modeling the Human Ear_m2jd
1/61
Modelling the Human Ear
Joanna Davison
Advanced Computer Science
Supervisor - Steve Maddock
16th May 2003
This report is submitted in partial fulfilment of the
requirement for the degree of
MSc in Advanced Computer Science
-
7/31/2019 Modeling the Human Ear_m2jd
2/61
Declaration
All sentences or passages quoted in this dissertation from other
people's work have
been specifically acknowledged by clear cross-referencing to
author, work and page(s).
Any illustrations which are not the work of the author of this
dissertation have been
used with the explicit permission of the originator and are
specifically acknowledged. I
understand that failure to do this amounts to plagiarism and
will be considered groundsfor failure in this dissertation and the
degree examination as a whole.
Name:
Signature:
Date:
I
-
7/31/2019 Modeling the Human Ear_m2jd
3/61
Abstract
The ear is a very complex shaped object, a result of which is
the problem of finding a
computer graphics modelling technique suitable to effectively
create a realistic ear
model. Techniques applied so far consist mainly of manual
methods, which generally
dont cope well with the extensive overlapping of the ear and
possess minimal scope
for generating different ears from an initial model.
The aim of this project is to solve this very problem with the
use of sweeping and
create not only a realistic ear, but also a model with the scope
to easily produce wide
ranges of different ears to represent the diversity of ear shape
of the worlds
population.
A program has been developed that, to a certain extent,
satisfies the above
requirements. The level to which this has been achieved and
potential improvements
are discussed at length.
II
-
7/31/2019 Modeling the Human Ear_m2jd
4/61
Acknowledgements
I would like to express thanks to my supervisor Dr. Steve
Maddock, for his
suggestions and guidance in the development of the project and
my tutor Marian
Gheorghe for his support. I would also like to thank Phil and my
family for their love
and support over the past four years, not to mention the use of
their ears.
III
-
7/31/2019 Modeling the Human Ear_m2jd
5/61
Contents
1.
Introduction...............................................................................................................
1
2. Literary
Review.........................................................................................................
2
2.1. The
Ear.................................................................................................................
2
2.2. Modelling Techniques and Previous Attempts
.................................................... 32.2.1. Manual
Modelling and Editing
.....................................................................
3
2.2.2. Data Capture
.................................................................................................
5
2.3 Higher-level Description Techniques
...................................................................
6
2.2.1 Hard Primitives
...........................................................................................
6
2.2.2 Soft Primitives
...............................................................................................
7
2.2.3 Swept
Primitives............................................................................................
7
2.2.4 Procedures and
Primitives..............................................................................
8
2.3.5 Suitability to Modelling the
Ear.....................................................................
9
2.4. Sweeping within
Nature.....................................................................................
10
2.4.1 The Regularity of Nature
.............................................................................
10
2.4.2 Shell-shape Surface
Generation...................................................................
102.4.3
Summary......................................................................................................
12
2.5.
Sweeping............................................................................................................
12
2.5.1 A Review of the Technique and Extended Methods
................................... 12
2.5.2 Practical problems associated with
sweeping.............................................. 13
3. Requirements and
Analysis....................................................................................
17
3.1 Aims and Objectives
...........................................................................................
17
3.2 Program
Capabilities...........................................................................................
17
3.2.1 Ear
Variation................................................................................................
18
3.3 Sweeping the ear
.................................................................................................
19
3.3.1 Parameterisation of the
Ear..........................................................................
19
3.3.2 Sweeping Theory
.........................................................................................
20
3.3.3 Rendering the
ear.........................................................................................
23
3.3.4
Summary......................................................................................................
23
3.4 Evaluation of the Ear
Model...............................................................................
24
3.4.1 Realism of ears
produced.............................................................................
24
3.4.2 Comparative Evaluation With Previous
Attempts....................................... 24
3.4.3 Ear Reproduction Evaluation Method
......................................................... 25
3.4.4
Summary......................................................................................................
25
4. Design, Implementation and
Testing.....................................................................
26
4.1
OpenGL...............................................................................................................
26
4.2 Program
Overview..............................................................................................
26
4.3 Generating the Ear
..............................................................................................
27
4.3.1 Surface Curve Sampling
..............................................................................
28
4.3.2 Cross Section Calculations
..........................................................................
29
4.3.3 Path
Curve....................................................................................................
35
4.3.4 Cross section
curves.....................................................................................
36
4.3.5
Summary......................................................................................................
37
4.4 Evaluation
...........................................................................................................
38
5. Results and
Discussion............................................................................................
40
5.1 Evaluation Results
..............................................................................................
40
5.2 Completion of objectives
....................................................................................
42
IV
-
7/31/2019 Modeling the Human Ear_m2jd
6/61
5.3 Considerations for Further
Development............................................................
43
5.4 Areas of Further Investigation
............................................................................
44
5.5 Project Progress
..................................................................................................
44
6.
Conclusions..............................................................................................................
46
References
....................................................................................................................
48
Appendix A Ear Model
Example............................................................................
50
Appendix B Ear
Variations.....................................................................................
51
Appendix C Evaluation
Questionnaire..................................................................
52
Figures
Figure 2.1(a): The major features of the ear (Image adapted from
[http06]).............. 2Figure 2.1(b): Depiction of
cross-sectional shape of the upper helix.........................
2
Figure 2.2 (a)&(b): Ear model from [http01] (Courtesy of
Steven Tubbritt) ............. 4
Figure 2.2 (c)&(d): Ear model from [http04] (Courtesy of Jon
McBain)................... 4
Figure 2.2 (e)&(f): Ear model from [http05] (Courtesy of
Martin Andersen)............ 4
Figure 2.2 (g)&(h): Ear model from [http02] (Courtesy of
Frank Silas TBC*) ......... 4
Figure 2.3: Ear shell by Genex using a data capture
method...................................... 6
Figure 2.4: CSG tree
[Watt00]....................................................................................
7
Figure 2.5: Candles representing soft
primtives........................................................
7
Figure 2.6: Depth component generated using
Extrusion........................................... 8
Figure 2.7: A wine glass as a solid of
revolution........................................................
8
Figure 2.8: Fractal object generated procedurally
...................................................... 8Figure 2.9:
Outlining the similarity between the shell opening and the
concha....... 12
Figure 2.10: An example of the problem of the curve to polygon
ratio .................. 13
Figure 2.11(a): Subdivision by equal
intervals.........................................................
13
Figure 2.11(b): Arc length
parameterisation.............................................................
13
Figure 2.11(c): Non-uniform
subdivision.................................................................
13
Figure 3.1: The right ear of each member of a family
unit....................................... 18
Figure 3.2: Pinna
Measurements...............................................................................
19
Figure 3.3(a): Positional continuity
..........................................................................
21
Figure 3.3(b): Tangential continuity
.........................................................................
21
Figure 4.2(a): Triangle of skeleton
points.................................................................
31
Figure 4.2(b): Extended points E
..............................................................................
31
Figure 4.2(c): Distances and points
..........................................................................
31
Figure 4.2(d): Translating M,E to
S,F.......................................................................
31
Figure 4.4: Computing a reference frame from the previous frame
......................... 33
Figure 4.5: QUAD_STRIP
formation.......................................................................
34
Figure 4.6: Vertex
normal.........................................................................................
34
Figure 4.7(a): Path curve with too high curvature
.................................................... 35
Figure 4.7(b): Crimping caused by cross-section
self-intersection .......................... 35
Figure 4.7(c): Path curve with increased radius of curvature
around the lobe ......... 35
Figure 4.8: Convex to concave cross-sections, left to right: A,
B,C......................... 36
Figure 5.1: Results of Question 1
.............................................................................
40Figure 5.2: Results from Question 2
.........................................................................
41
Figure 5.3: Results from Question3
..........................................................................
42
V
-
7/31/2019 Modeling the Human Ear_m2jd
7/61
Figure 5.4: A selection of mammal ears
...................................................................
44
* Permission for these two images was not officially confirmed
due to an expired
email address, but they were included anyway given their
substantial relevance to this
work
Tables
Table 3.1: Anthropometric Statistics, %=100(2/)
................................................ 19Table 4.1: Class
Responsibilities and relevant details of
implementation................ 27
VI
-
7/31/2019 Modeling the Human Ear_m2jd
8/61
1. Introduction
1. Introduction
1
There are many different techniques by which to create a
computer graphics model.
However, realistically capturing the complex shape and
concavities of the human ear is
one of the more complex objects to model and a technique capable
of doing so does
not immediately present itself. There have been
three-dimensional models of the
human ear created, the majority of which used manual techniques.
The ears createdhave all been products of the designers artistic
impression of an ear. Martin Andersen
comments:
Many people try modelling a human ear but fail in realism,
because of its complex
shape. The ear is [] known as one of the most complex parts to
model in 3D.
(http05)
The aim of this project is to find a solution to this complex
modelling problem. In
doing so, the shape of the ear and its features are considered
with particular attention to
the concavities and overlapping created by the spiral-like form
of the outline shape.
Potentially suitable techniques are fully considered and an
investigation is made in to
the fascinating subject of regularity in Nature and natural
objects that unearths
properties of nature which would support the use of sweeping.
The findings of these
areas of investigation point towards sweeping as the most
promising solution.
The general concept behind sweeping is to define a
three-dimensional object in terms
of a two-dimensional cross section, the generator, and a
three-dimensional spine curve.
The three-dimensional object is generated by sweeping the
cross-section along the path
of the three-dimensional curve.
An important factor that should be taken into consideration is
the huge variancebetween individuals ears. A persons ear is in fact
as unique as their fingerprint. The
size and shape of a persons ear will change as they get older
and the difference
between peoples ears across race and gender are substantial. As
such, it is near
impossible to define a normal ear in terms of average size and
shape. Thus, in
creating a truly realistic ear, these dominating factors should
be taken into
consideration. By appropriately parameterising the path and
cross-sections, the scope
should be available to generate a range of different ears.
These factors shall be applied to sweeping and the potential of
sweeping as an ear
modelling technique shall be deduced from the evaluation of ear
models created with
the use of sweeping.
Chapter 2 presents a review of modelling techniques in general
and attempts to date to
create a realistic ear model. Sweeping is also covered in detail
along with potential
problems with using the technique. The factors of nature that
indicate the use of a
sweeping technique are also discussed. Chapter 3 looks at the
issues associated with
ear variation and addresses the process of sweeping the ear and
the practical
considerations involved. Evaluation techniques to assess the
realism of the ear are also
considered. Chapter 4 goes into specific detail of the theory
and implementation
methods used in the program to create the final ear model. The
evaluative procedure is
considered in greater depth. The findings of the evaluation
process are considered in
Chapter 5, where conclusion may be drawn with respect to the
initial objectives. Theproject is concluded with Chapter 6.
-
7/31/2019 Modeling the Human Ear_m2jd
9/61
2. Literary Review
2. Literary Review
2
This chapter begins by looking at the ear itself, and goes on to
justify the use of
sweeping to model it. In doing so, previous attempts to model
the ear are discussed and
evaluated, namely manual modelling and editing and a data
capture technique, along
with other potential constructive modelling techniques and
aspects of Nature
displaying qualities of sweeping theory. The last section of
this chapter coverssweeping in detail and looks at the more
practical aspects of the technique.
2.1. The Ear
The ear tends to be a somewhat unremarkable aspect of human
facial appearance. This
is mainly due to the typically face-to-face nature of human
interaction and the fact that
they are often covered by hair (Bruce and Young, 1998). What is
commonly referred
to as the ear is in fact the pinna or earflap. Historically, the
pinna is thought to have
amplified sounds, but its actual job is a little more specific
than this. The pinna helps to
locate sound. Its ridges and clefts bounce a few sound waves
into the ear later than the
rest, in a pattern that depends on their source which the brain
then decodes (McNeill
2000). Sound location is also aided by the fact that we have two
ears. The physical
separation of the ears helps localize sound sources through
minute differences in the
timing of signals arriving at each ear (Bruce and Young, 1998),
creating a kind of
auditory parallax.
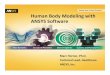
Figure 2.1(a): The major features of the ear (Image adapted from
[http06])
Figure 2.1(b): Depiction of cross-sectional shape of the upper
helix
The human ear has a unique although somewhat unnoticed form, the
main parts of
which can be seen in Figure 2.1(a). The outer rim is referred to
as the helix, the name
reflecting its resemblance to a coil or spiral. This rim curves
in over the pinna like a
breaking wave, as shown in the inset of Figure 2.1(b). Half way
down the helix, a
second ridge runs alongside it, the antihelix. The arrows in
Figure 2.1(a) shows the
extent of the antihelix. It swings up into a little into a
little plane that splits into two
and curves round in the upper part of the ear and swings down
into the lobe. The lobe
is soft and fatty in contrast to the rest of the ear, which is
comprised of cartilage. Thelittle nub of flesh beside the ear is
called the tragus, the job of which is to protect the
-
7/31/2019 Modeling the Human Ear_m2jd
10/61
2. Literary Review
3
ear canal. The hollow near the ear canal is the concha, the name
being derived from the
Latin for shell(McNeill 2000).
In the same way as an individuals fingerprints are unique, so
are a each persons ear
patterns, thus offering the potential by which to identify
criminals. In 2001, a murder
trial in the USA and three murder trials in the UK made
headlines in newspapers and
TV shows, because, in each, ear-prints had been used as evidence
for the prosecutionas stated in Marks Working Group, 2001.
Features of the ear to bear in mind with respect to creating a
three-dimensional model
are the spiral nature of the flow of the ear and the concavities
this creates especially at
the top of the helix and around the antihelix and concha.
Additionally, it should be
noted that ear shape and size can vary vastly from person to
person, so a complete ear
model should be created with a view to easy reproduction of a
variety of different ears
(this issue is considered in greater depth in Chapter 3).
2.2. Modelling Techniques and Previous Attempts
Previous examples of techniques used to model the human ear are
relatively few and
far between. This is probably largely due to the insignificance
of the ear in modelling
the human form. Most human heads are modelled with respect to a
predominantly
frontal view, concentrating on the mobile features of the face
involved with speech and
expression. Although some people are capable of wiggling their
ears, it is rare to be
able to move the ears independently of the head. Thus, the ears
are not predominately
involved in facial animation and given they are often covered by
hair, not always
visible anyway. As such, the ears are considered as a secondary
object with respect to
modelling and are often stuck on at a later stage if necessary.
More recently there
have been attempts to model the human ear as an entity in its
own right. Mostcommonly, this is in conjunction with areas of
research regarding hearing aids and in-
ear headphones, for example, where the shape of the ear alone is
of primary interest.
One such company is Genex Technologies, (http03), who are
introducing their
modelling methods to the world of hearing aid development.
Various potential
modelling techniques are considered in this section. Where
attempts to model the ear
have been made using a particular technique, the success of the
model is discussed.
2.2.1. Manual Modelling and Editing
Manual modelling using a three-dimensional digitiser (or
equivalent manual strategy)
is one of the simplest ways in which to model an object. The
designer indicates theposition of polygon vertices by placing
points on an object by hand. The
threedimensional co-ordinates of these points are input to the
system via athreedimensional digitiser and associated with the
corresponding polygons. Thesuitability of the vertex positions on
the modelled object is dependent on the
experience and decision of the designer, as such, automated
strategies for ensuring
adequate representation are quite common. One of the more widely
used strategies is
to draw a grid over the surface of the object and ascertain the
vertex positions from the
intersections of the curved grid lines.
Most attempts so far at modelling the ear are based around a
manual modelling
technique of some kind. The tinyworld website, (http01),
presents a technique bySteven Tubbritt, that uses a picture of an
ear with the main lines defined. Using a tool
called MAYA, polygons are fitted to the picture as closely as
possible to maintain the
-
7/31/2019 Modeling the Human Ear_m2jd
11/61
2. Literary ReviewLiterary Review
4
4
essential shape of the ear. Using a side view for reference at
all times, the initially
placed polygons are dragged into position, creating depth to
achieve a
threedimensional model. It is a time-consuming process of
extruding edges andmerging vertices to create a realistic model of
the ear. The product of this particular
example creates a moderately realistic looking ear. However, on
closer inspection,
where a real ear would overlap itself, such as the top of the
helix, this ear model does
not. Figures 2.2(a) and 2.2(b) shows the polygon framework of
the model of the earand the same ear after rendering with a shading
algorithm, respectively.
essential shape of the ear. Using a side view for reference at
all times, the initially
placed polygons are dragged into position, creating depth to
achieve a
threedimensional model. It is a time-consuming process of
extruding edges andmerging vertices to create a realistic model of
the ear. The product of this particular
example creates a moderately realistic looking ear. However, on
closer inspection,
where a real ear would overlap itself, such as the top of the
helix, this ear model does
not. Figures 2.2(a) and 2.2(b) shows the polygon framework of
the model of the earand the same ear after rendering with a shading
algorithm, respectively.
(a) (c) (e) (g)
(b) (d) (f) (h)
Figure 2.2 (a)&(b): Ear model from [http01] (Courtesy of
Steven Tubbritt)
Figure 2.2 (c)&(d): Ear model from [http04] (Courtesy of Jon
McBain)
Figure 2.2 (e)&(f): Ear model from [http05] (Courtesy of
Martin Andersen)
Figure 2.2 (g)&(h): Ear model from [http02] (Courtesy of
Frank Silas TBC*)
The step-by-step modelling process presented by Jon McBain,
(http04), again uses the
MAYA tool to generate the model. A profile of the general ear
shape is created and
divided into four major areas using a split tool. Theses areas
are moulded into an ear
shape by splitting and pulling out vertices to define ridges and
features, adding and
deleting polygon edges as the process goes on. More vertices are
used around the ear
hole to better define it and a large polygon is added at the
back of the ear to close it.
Figures 2.2(c) and 2.2(d) show the product of this approach as a
mesh and a rendered
view. Again, this model incorporates little of the overlapping
of a real ear. This
modelling technique has a very simple but rough basis and is
completely open toartistic impression since it is not generated
from any specific ear image. Martin
Andersen uses a similar approach to that described on the
3d-designer website
-
7/31/2019 Modeling the Human Ear_m2jd
12/61
2. Literary Review
5
(http05). Andersen actually provides a video of the creation of
the ear, which may be
downloaded and viewed. This considerably speeded-up recording of
the continuous
steps of the ear tutorial lasts 30mins, a good indication of the
time cost involved in this
type of approach to modelling the ear. However, in terms of
realism and the attention
paid to the overlapping of the ear, Andersens final product,
shown as a mesh and
shaded in Figures 2.2(e) and (f) respectively, is an improvement
on the majority of
examples encountered.
Another slightly different manual modelling approach presented
by Frank Silas,
(http02), uses a tool called Animation Master (AM). A wire frame
of the ear is created,
composed of five continuous splines as shown in Figure 2.2(g).
The square base spline
is a duplicate of the one on the head to which the ear will be
attached. The other four
splines are created using a single spline and define a rough
shape of the ear. They have
been scaled and adjusted to position, decreasing in size at
different depths to look like
an ear shaped funnel. A skinning algorithm is used on the spline
contours in pairs,
converting the boundary data into large numbers of triangular
polygons. As with
previous attempts the final ear model is based on the impression
of what the individual
modeller perceives an ear to look like. This technique is easily
implemented in AM,but the correctness of the shape of the initial
splines is essential and a lot of fiddling
may be required to achieve the correct end effect. Due to the
technique itself, the issue
of realistic overlapping is clearly not taken into
consideration. Figure 2.2(h) shows this
ear model after shading rendering, however the image quality is
rather low and only
the outline is discernable.
The short falls of each attempt to model the ear using the
manual methods detailed
above are consistently reoccurring. The main areas of
inadequacies are the lack of
realism especially regarding the extensive overlapping of a real
life ear; the lack of
scope for developing ears of varying shape through re-factoring
of the initial modelproduced; excessive time cost due to the fiddly
ad-hoc methods employed.
2.2.2. Data Capture
Another quite accurate modelling method for producing polygon
meshes is the use of
an automated device such as a laser ranger. An example of data
capture using a laser
ranger is the rotation of the laser 360 degrees around the
object in question (or vice-
versa). The laser ranger returns a set of parallel contours
outlining the shape of the
object which are then skinned in the same way as the manual
generated splines
described above [http02]. Automated methods are typically suited
to inert objects since
the process requires the object being modelled to stay in
exactly the same positionthroughout the data capture process.
Modelling of objects such as the head often
contain noise in the model produced due to minute unintentional
movements during
the data capture stage. An additional significant drawback is
the inability of laser
rangers to model concave objects. Due to the implementation of
the method as
described, the incident beam will not necessarily hit certain
surfaces of an object with
concavities. Both these issues, in particular the latter, imply
that the automatic device
is not suited to accurate modelling of the human ear. Despite
the drawbacks, attempts
have been made to apply automated processes to modelling aspects
of the ear; one
such example is Genex Technologies (http03).
Genex Technologies are an electrooptical company focused on
developingstateoftheart electronic imaging technologies. One of
their recent developments isa revolutionary system that avoids the
problems presented by the drawbacks of the
-
7/31/2019 Modeling the Human Ear_m2jd
13/61
2. Literary Review
6
automated process with respect to modelling the ear. The problem
of noise, created by
movement, is solved using Genexs revolutionary Ear Impression 3D
Digitizer with
their Rainbow 3D camera to create a 360degree model. The
technology to combatnoise from automated models is clearly
available with respect to the ear. However,
Genex does not overcome the limitations of modelling concave
objects. Their system
only produces an impression of the ear, that is, an accurate
model of the underside of
the ear. Figure 2.3 shows the ear shell created by this model,
the angle is as if viewedfrom a position inside the head. Genex is
currently working on creating an intraoral3D-capture tool to solve
the problem of capturing data directly from inside the ear.
However, this is still at a research level. Within the
boundaries of current technology,
automated systems are not suitable to model the concave shape of
the human ear,
accurately or otherwise.
Figure 2.3: Ear shell by Genex using a data capture method
2.3 Higher-level Description Techniques
The drawbacks of the methods discussed above lead to the
investigation of the
suitability of higher-level techniques in modelling the ear. It
should be noted that this
discussion is not intended to be complete in its coverage of
techniques. The techniquesselected have been chosen to display a
broad view of modelling while maintaining
relevance to modelling the ear. The structure of this discussion
is based around that of
work by Maddock, 1999.
In considering modelling techniques, categorisation can be made
as to whether a
technique is one of refinement or construction. The constructive
approach is concerned
with combining primitives to produce a whole model, while a
refinement approach
takes a whole model and refines it to create another whole
model. It should be noted
that the whole model products of both these types of method
could themselves be
primitives.
Creating a model of the human ear is essentially concerned with
constructive
modelling approaches. Thus, in discussing the relevant modelling
techniques, hard
primitives, soft primitives, swept primitives and procedural
primitives will be covered.
It should be noted that overlapping occurs between these
primitives since the first three
types of primitives can be parameterised and treated as
procedural primitives
themselves (Maddock, 1999).
2.2.1 Hard Primitives
Constructive Solid Geometry (CSG) is the classic approach to
modelling solid objects,
combining simple elementary geometric solid objects or hard
primitives. Traditional
examples of these 'hard' primitives (Maddock, 1999), are sphere,
cylinder, cone, torus
and rectangular solids. These solids are combined using linear
transformations and
-
7/31/2019 Modeling the Human Ear_m2jd
14/61
2. Literary ReviewLiterary Review
7
7
Boolean set operators, namely union, difference and
intersection. The resulting model
of an object is stored as a tree representing the object's
modelling history, in which the
leaves are the primitives and the nodes are the linear
transforms or operators (Figure
2.4 shows a CSG tree).
Boolean set operators, namely union, difference and
intersection. The resulting model
of an object is stored as a tree representing the object's
modelling history, in which the
leaves are the primitives and the nodes are the linear
transforms or operators (Figure
2.4 shows a CSG tree).
blend of candles
heatprofile
combined global
scalar field
Figure 2.4: CSG tree [Watt00]
Figure 2.5: Candles representing soft primtives
2.2.2 Soft Primitives
A modelling technique applicable to more organic objects is a
form of implicit surface,
which creates soft or blobby objects. Implicitly defined
components, most commonly
spheres, are used as primitives. These primitives are combined
by summing the field
effects of the equations defining the primitives. In other
words, the surface is formed
by the effect of the primitives exerting a field of influence
over a local neighbourhood.
The area of influence of a spherical primitive would clearly be
a sphere where a
potential function gives a scalar value for any point, P, within
the sphere (Maddock,1999). The equation below is an example of a
potential function:2
2
2
1)(
=
R
rsPf for r R
where s=1 (usually), r is the distance of point, P, to the
centre of the primitive and R is
the radius of influence of a primitive. At a particular value of
r, a scalar field f(P), is
produced from the combined effect of each primitives potential
function. One of the
simplest methods of combination is addition, where for a point,
P, each contributing
potential function is evaluated and summed. The result is an
object representation in
the form of an implicit surface. A naturally occurring phenomena
that mirrors this
field of influence combination technique is the blending of heat
profiles of multipleheat sources. Figure 2.5 shows this with two
candles representing point-based field
generators. It should be noted that field functions can be coded
such that they have a
positive or negative effect on the resulting surface i.e.
whether they should be summed
or subtracted respectively.
2.2.3 Swept Primitives
The general concept behind swept primitives is to define a
three-dimensional object in
terms of a two-dimensional cross section, the generator, and a
three-dimensional spine
curve. The three-dimensional object is generated by sweeping the
cross-section along
the path of the three-dimensional curve. The simplest example of
this technique,referred to as extrusion, is to sweep a
cross-section along a straight line creating a
depth component. An example of this is shown in Figure 2.6,
where the cross section
-
7/31/2019 Modeling the Human Ear_m2jd
15/61
2. Literary Review
8
used is the letter F swept straight backwards to create a
three-dimensional font. A
simple example of three-dimensional shape generation is a torus,
where both the cross-
section and the curve are circles. A special case of sweeping is
applicable to surfaces
or solids of revolution. In these cases, a curve is swept around
a central axis of
revolution to produce a three-dimensional object such as the
wine glass in Figure 2.7.
A more complex extension of the sweeping technique is lofting
which involves using
multiple cross-sections or contours. The cross-sections can be
varied by a scalingprofile curve or a finite set of cross-sections
can be interpolated. Alternatively, a
combination of these two methods can be used (Maddock,
1999).
Work by Snyder in 1992, looks at sweeps and how to construct an
object from a set of
procedurally defined sweeps. Qualities of the CSG process are
evident in Snyders
ideas; a shape description language is used to combine (swept)
primitives to create
higher-level shapes that can themselves become shape-building
operators.
Figure 2.6 Figure 2.7 Figure 2.8
Figure 2.6: Depth component generated using Extrusion
Figure 2.7: A wine glass as a solid of revolution
Figure 2.8: Fractal object generated procedurally
2.2.4 Procedures and Primitives
Any parameterised modelling technique is essentially procedural.
Here we split our
discussion of procedural techniques into procedural models and
procedural
organisation.
Procedural models are a form of constructive modelling
technique. Objects are
composed of parts, and the parameters identified, such as
relationships between the
parts, can be defined to alter the object composition (Maddock,
1999). Both CSG and
Snyders shape processes (1992), are both techniques that produce
objects composed
of parts and thus are included in this category.
Procedural organisation is a way of structuring a collection of
simple primitives, often
by employing a shape grammar. Much of the work in this area
centres on describing
the structure of plants examples of which can be found in Foleys
book (1990).
Symmetry relationships can be parameterised as well as the
primitives such that the
shape grammar organises a pattern of primitives into an object
(Maddock, 1999). One
idea is the parameterisation of some surface attribute to create
variations on a model.
Fractals employ a self-similarity attribute of objects to
procedurally generate objects of
this type. The roots of this particular method lie in fractal
geometry, a term used to
describe an attribute, exhibited by certain natural phenomena
such as coastlines, ofstatistical self-similarity. Fractal
techniques are most commonly used to generate
terrain models using, at the simplest level, recursive
subdivision algorithms to divide
-
7/31/2019 Modeling the Human Ear_m2jd
16/61
2. Literary Review
9
the objects facets into a large number of smaller facets. A
simple example of this is
uniform triangular subdivision generating a displacement in a
direction normal to the
plane of the original facet (see Figure 2.8). Fractal object
generation can be extended
beyond this simple example to the creation of quite complex
objects.
2.3.5 Suitability to Modelling the Ear
The modelling techniques described above can all be considered
effective in modelling
certain types of objects. However, in this summary section the
suitability of these
methods to model the shape of human ear will be discussed. As
noted in previous
sections aspects of the ear shape to note are the complexity of
the shape, the spiral type
flow of the ear curves causing considerable overlapping in the
general shape of the ear
and the more local overlapping of the helix and antihelix.
CSG with hard primitives is a technique that can be very
effective in modelling
certain objects such as machinery parts built up in CAD as
commented on by Watt,
2000, and objects modelled with a view to future editing which
is easily facilitated by
the CSG tree structure (Foley 1990). CSG is perfectly suited to
the application ofcreating machine parts (Maddock, 1999), however,
it is not a technique well suited to
modelling biological objects like the ear. Due to the complexity
of the ear shape, it
would be almost impossible to represent it using the primitives
available. However, the
ideas and technique of CSG may have a value in constructing an
ear shape object by
combining more complex primitives created using other types of
modelling technique.
This approach to CSG is considered in Snyders work on generative
modelling in
1992.
Soft Primitives clearly lend themselves to modelling more
natural, organic objects.
Although this technique has not been applied to the ear before,
it could potentiallyproduce a reasonably realistic model of the
ear. However, given the complexity of the
ear shape and the non-blobby smooth curves of the helix, the
number of primitives
required for a realistic ear could be quite substantial.
Additionally, the primitives used
would have to be both positive (added) and negative (subtracted)
to cope with the
overlapping of the ear shape, and whether typically spherical
primitives could cope
with this substantial overlapping is uncertain. Another aspect
to note is the lack of
scope for re-factoring the ear produced, to generate, with
relative ease and low cost,
differently shaped ears. Taking all these factors into
consideration, soft primitives
show the most potential for modelling the ear so far, but are
far from an ideal solution.
In contrast to the techniques discussed above, any potential
drawbacks of usingsweeping to model the ear are not immediately
obvious. With the correct choice of
cross-section at the top of the helix and along the antihelix,
the extensive overlapping
involved in the ear shape could be incorporated. The spiral
shape of the flow of
curvature of the ear could be accommodated for by using a sweep
path curve that
mirrored this shape. The available extensions of the simple
sweeping technique,
involving both a scaling profile curve combined with different
specified interpolated
cross-sections, is potentially capable of coping with the
complexities of the ear shape.
Additionally, the use of a sweeping technique provides a
reasonable scope for
producing families of different ears via relatively low
labour-cost alterations to the
initial sweep curves and cross-sections.
Where procedural models are concerned, their potential for
modelling the ear clearly is
directly dependant on what type of parts comprises the object.
As previously
-
7/31/2019 Modeling the Human Ear_m2jd
17/61
2. Literary Review
10
discussed, CSG is not s suitable approach, but Snyders method
[Snyd92] where the
parts are predominantly swept objects, could potentially provide
an appropriate
technique by which to create an ear, providing the parts used
were appropriately
realistic themselves. With respect to procedural organisation,
the complex ear-shape
lacks the self-similarity and iterative shape development
required to break the shape
down into a simple grammar. As a direct result of these factors,
procedural
organisation cannot be applied in describing the ear.
In comparison to the other techniques considered, sweeping shows
potential for
producing a realistic model of the human ear. The nature of the
technique lends itself
to modelling of the overlapping cavities of the ear, the main
area of the ear-shape other
techniques struggle to thoroughly accommodate. Further
investigation into whether
sweeping is a suitable modelling technique leads us to consider
sweeping as an
effective technique for modelling naturally occurring organic
objects.
2.4. Sweeping within Nature
The aim of this section is to look at the scope of sweeping for
modelling naturallyoccurring objects. In doing so, the regularities
of natural objects are considered, as well
as taking a detailed look at the area of shell shapes and
surface structure.
2.4.1 The Regularity of Nature
Sweeping can be effectively applied to a very wide range of
man-made objects. This is
largely due to the high degree of regularity found in most man
made objects with many
of these objects displaying symmetry especially around a central
axis. If an object is
not symmetrical overall, it is generally comprised of balanced
sub-assemblies. The
concept of regularity, especially symmetry, is one strongly
promoted by sweeping. Agood example of symmetry in man-made objects
can be found in objects created using
technique called woodturning. This craft involves a piece of
wood being spun quickly
around its length while a lathe is used to carve groves into the
surface of the wood
around its circumference, producing an object symmetrical about
a central axis e.g. a
wood-turned table-leg, which clearly lends itself to being
modelled using sweeping.
Looking around, it is clear that not only man-made objects
possess an element of
regularity. Living, natural objects commonly display cylindrical
regularity either as a
whole or as a composition of cylindrical parts. Some simple
examples include the stem
of a flower and our own limbs, fingers and toes. Marriott
(1992), models a holly leaf
using sweeping, which, given the roughly cylindrical nature of
the branches couldeasily be extended to a model of a holly bush. In
his work, Wainwright (1988), argues
that the bodies of multi-cellular plants and animals are
cylindrical in shape. He
hypothesises that this form evolved from the structural and
aero-dynamical advantages
of cylinders. Thompson (1961), takes a slightly broader view,
arguing that the majority
of aspects of natural growth and form are governed by underlying
mathematical theory
and structure. A more detailed area of his work, namely
shell-shape, is discussed in the
next section.
2.4.2 Shell-shape Surface Generation
Chapter XI of Thompsons work in 1961, looks at logarithmic
spirals in which heargues that the essence of shell-shape is
captured by the logarithmic spiral.
Measurements of a wide variety of shell types are presented to
show their shape
-
7/31/2019 Modeling the Human Ear_m2jd
18/61
2. Literary Review
11
conformity. He goes on to describe a method by which to generate
the surface of shell
as described in the passage below. (This particular passage is
taken from Przemyslaw
and Fowler (1998), in which Thompsons observations are quoted in
a slightly edited
form.)
The surface of any shell may be generated by the revolution
about a fixed axis of a
closed curve, which, remaining always geometrically similar to
itself, increases itsdimensions continually.[] Let us imagine some
point within this closed curve, such
as its centre of gravity. Starting from a fixed origin, this
characteristic point describes
an equiangular spiral in space about a fixed axis (namely the
axis of the shell), with or
without a simultaneous movement of translation along the axis.
The scale of the figure
increase in geometrical progression while the angle of rotation
increases in
arithmetical, and the centre of similitude remains fixed. [] The
form of the
generating curve is seldom open to easy mathematical
expressions.
Thompsons ideas clearly display the underlying ideas of the
sweeping technique using
a similar scaled cross-section. A more recent study of shell
shape can be found in
Meinhardts work, which looks at biological pattern formation in
shell patterning(Meinhardt, 1998), as well as the three-dimensional
structure of the shell itself
(Przemyslaw and Fowler, 1998).
In Meinhardts book, a sweeping technique for modelling the
surface of a shell is
presented by Przemyslaw and Fowler. The underlying ideas of
which were based
Thompsons observations. The surface of the shell is defined by
sweeping a generating
curve, C, along a helico-spiral, H. The size of C increases as
it revolves around the
shell axis. The generating curves, C, are constructed from one
or more Bezier curve
segments, which determine the shell profile and opening. The
opening of the shell is
oriented using Frenet frames, which are covered in the next
section.
The sweeping methods applied to generating the shell surface are
of considerable
interest with respect to modelling the ear due to the rough
shape similarity between
them. The general spiral form of the shell displays two
properties already noted as
attributes of the ear-shape. Namely, the spiral flow of the ear
curves down toward the
ear-hole and the extensive overlapping of the general ear-shape
due to the spiral nature
of its form. Przemyslaw gives examples of five very different
variations in shell shape
created using the same cross-section and altering only two
parameter values
characterising the helico-spiral sweep path. This shell-shape
variety is extended even
further by using different cross-section curves.
Given the similarities between shells and ears, the possibility
of creating realistic ears
using cross-sections swept around spiral-like curves would seem
to hold a lot of
potential. The vast scope for generating different shell
families also supports the idea
that sweeping would enable generation of different ears by
varying the sweep
parameters defining the sweep path and/or the cross-sections
used.
-
7/31/2019 Modeling the Human Ear_m2jd
19/61
2. Literary Review
12
Figure 2.9: Outlining the similarity between the shell opening
and the concha
As a side point, it is interesting to note that the name for the
main concavity of the ear,the concha, is derived from the Latin
word for shell (McNeill, 2000). This is due to the
resemblance of the concha to the opening of a shell. Figure 2.9
tries to capture this
resemblance outlining the similarity in shape with dotted lines.
Unfortunately, the
opening of a shell only represents the shape of the
cross-section used in the sweeping
method. Thus, this resemblance between ear-shape and shell-shape
does not indicate a
direct relationship between sweeping the ear-shape and sweeping
the surface of a shell.
2.4.3 Summary
This section has covered theories concerning the common
cylindrical form of naturally
occurring objects and the more detailed work concerning shells
to which ears may be
naturally linked. Both these areas of discussion have
strengthened the case in favour of
using sweeping to create a potentially realistic model of the
ear.
2.5. Sweeping
This section looks at the sweeping technique in greater depth,
considering some of the
more practical issues associated with using this technique. We
begin with a review of
the basics of sweeping as discussed briefly in Section
2.2.3.
2.5.1 A Review of the Technique and Extended Methods
The general concept behind swept primitives is to define a
three-dimensional object in
terms of a two-dimensional cross section, the generator, and a
three-dimensional spine
curve. The three-dimensional object is generated by sweeping the
cross-section along
the path of the three-dimensional curve. The simplest example of
this technique,
referred to as extrusion, is to sweep a cross-section along a
straight line creating a
depth component. Cross-sections can also be swept along curves
to create objects such
as the simple torus, where a circular cross-section is swept
around another circle. A
special case of sweeping is applicable to surfaces or solids of
revolution. In these
cases, a curve is swept around a central axis of revolution to
produce a three-
dimensional object such as a wine glass.
-
7/31/2019 Modeling the Human Ear_m2jd
20/61
2. Literary ReviewLiterary Review
13
13
A more complex extension of the sweeping technique is lofting
which involves using
multiple cross-sections or contours. The technique was used
extensively in the
shipbuilding industry to define the shape of the ships main
body. Ducted solids,
generalised cylinders or tubular surfaces are terms commonly
used to refer to objects
created by allowing the cross-section to vary along the length
of the sweep curve. The
cross-sections can be varied by a scaling profile curve or a
finite set of different cross-
sections can be interpolated. Alternatively, a combination of
these two methods can beused. Snyder (1992) presents a technique
that uses a shape description language to
combine (swept) primitives to create higher-level shapes that
can themselves become
shape-building operators.
A more complex extension of the sweeping technique is lofting
which involves using
multiple cross-sections or contours. The technique was used
extensively in the
shipbuilding industry to define the shape of the ships main
body. Ducted solids,
generalised cylinders or tubular surfaces are terms commonly
used to refer to objects
created by allowing the cross-section to vary along the length
of the sweep curve. The
cross-sections can be varied by a scaling profile curve or a
finite set of different cross-
sections can be interpolated. Alternatively, a combination of
these two methods can beused. Snyder (1992) presents a technique
that uses a shape description language to
combine (swept) primitives to create higher-level shapes that
can themselves become
shape-building operators.
2.5.2 Practical problems associated with sweeping2.5.2 Practical
problems associated with sweeping
There are certain issues that immediately arise when
crosssectional sweeping is usedto model objects. There are three
main difficulties associated with curved spines (Watt,
2000), which will be considered individually as follows.
There are certain issues that immediately arise when
crosssectional sweeping is usedto model objects. There are three
main difficulties associated with curved spines (Watt,
2000), which will be considered individually as follows.
Curve to Polygon ProcedureCurve to Polygon Procedure
The first problem is controlling the size of the polygons, an
example of which is given
in Figure 2.10. In this example, the size of the polygon
primitives depends on the path
of the curve. Consider the parametric position of the curve, u,
in equation (1) above.
Dividing u into equal intervals does not always give the best
results or cause the points
to appear at equal intervals along the curve. The latter is due
to the uniform increase of
u in a straight line as opposed to along the path of the curve.
Arc length
parameterisation is a procedure that does divide the curve into
equal intervals.
However, this procedure is not straightforward, nor is it
consistently appropriate
depending on the curvature of the curve. Figure 2.11(a) and
2.11(b) show division of acurve using equal intervals and arc
length parameterisation respectively.
The first problem is controlling the size of the polygons, an
example of which is given
in Figure 2.10. In this example, the size of the polygon
primitives depends on the path
of the curve. Consider the parametric position of the curve, u,
in equation (1) above.
Dividing u into equal intervals does not always give the best
results or cause the points
to appear at equal intervals along the curve. The latter is due
to the uniform increase of
u in a straight line as opposed to along the path of the curve.
Arc length
parameterisation is a procedure that does divide the curve into
equal intervals.
However, this procedure is not straightforward, nor is it
consistently appropriate
depending on the curvature of the curve. Figure 2.11(a) and
2.11(b) show division of acurve using equal intervals and arc
length parameterisation respectively.
a b c
Figure 2.10 Figure 2.11(a) 2.11(b) 2.11(c)
Figure 2.10: An example of the problem of the curve to polygon
ratio
Figure 2.11(a): Subdivision by equal intervals
Figure 2.11(b): Arc length parameterisation
Figure 2.11(c): Non-uniform subdivision
Ideally the curve would be divided into intervals depending on
the curvature of the
curve as areas of high curvature require an increased rate of
polygon generation.. This
can be achieved using a curve subdivision algorithm in which the
curve is subdivideduntil a linearity test is positive, i.e. the
interval in question meets a flatness criterion.
Uniform subdivision is the simplest case where a user specifies
a level at which
-
7/31/2019 Modeling the Human Ear_m2jd
21/61
2. Literary Review
14
subdivision of the curve terminates. Non-uniform subdivision
means that subdivision
terminates when a curve interval meets a flatness criterion
(Figure 2.11(c)). In other
words, the degree of subdivision is allocated according to
curvature, so areas of high
local curvature are subject to more subdivision, as required.
This second category of
subdivision is preferable but does incur extra computational
cost due to the flatness
testing.
Cross-section Orientation
The second practical issue of cross-sectional sweeping is the
orientation of the cross-
section with respect to a varying spine curve. In constructing
ducted solids and
generalised cylinders, the object structure must be prevented
from twisting, by
correctly aligning each cross-section with its neighbours.
Cross-sectional alignment is
achieved by the use of reference frames that define position and
orientation of a cross-
section along the central axis of the cylinder. One of the more
intuitive reference
frames is the Frenet frame, discussed in considerable detail by
Bloomenthal (1990), the
main points of which are presented below. A reference frame
consists of three
mutually orthogonal vectors. At each set of sample points along
the curve, therespective cross-section is embedded into the
coordinate system formed by these
vectors.
A Frenet frame is defined on the spine curve by the sample
point, P, and three
orthogonal vectors, between them defining position and
orientation. Those vectors are
the tangent vector, T, the principal normal, N, and the
binormal, B. Figure 2.12 shows
these vectors derived at a point, P, on the sweep curve,
Q(u).
The tangent vector, T, also referred to as the unit length
velocity vector, is derived
from the velocity vector or derivative of the curve:
T = V / |V| (2.1)
where, V = d/du(Q(u)) = 3au2 + 2bu + c
The normal vector, N, is often defined to be in the direction of
curvature of the curve.
N is indirectly derived from the acceleration vector or second
derivative of the curve,
A.
N = K / |K| (2.2)
where, K = V x A x V / |V|4
where, A = d/du(V) = 6au + 2b
The binormal vector, B, is the crossproduct of the tangent
vector and the principalnormal.
B = T x N (2.3)
-
7/31/2019 Modeling the Human Ear_m2jd
22/61
2. Literary Review
15
Figure 2.12: Vectors B, N, T, and point, P, defining a Frenet
frame
One of the main advantages of the Frenet frame is that it can be
computed at arbitrary
points along the curve (Bloomenthal, 1990). The main drawback of
the method is that
the Frenet frame is undefined where the curve is degenerate,
i.e. at points of inflection
and along straight sections of the curve. Either side of an
inflection point the curvature
vector can suddenly reverse direction causing a violent twist in
the progression of
Frenet frames (Watt 2000). A term used to describe the basis of
this problem is torsion,
meaning rotation around the tangent to a curve (Bloomenthal,
1990).
Bloomenthal describes a torsion minimizing solution by Shani and
Ballard. The
solution is iterative using rotation minimizing frames. The
basis of this solution is that
an initial reference frame is defined at the beginning of the
curve. This initial reference
frame is then propagated along the curve using small local
rotations. The advantage of
this method is the immunity of the reference frame to
degenerative sections of the
curve. However, the result produced is not necessarily intuitive
and due to the
implementation of the method, analytical computation of an
arbitrary reference frame
is not permitted. A similarly based solution is that devised by
Ken Sloan (http07),
which uses the orthogonal propertied of the reference frame to
propagate the vectors
using cross-product computation.
Self-intersection of Cross-sections
The third practical issue of the sweeping technique is the
problem of cross-sections
self-intersecting or crimping as it is sometimes referred to
(Figure 2.13). Crimping
occurs in areas where the radius of curvature of the path of any
points traced out by the
cross-sectional curve exceeds the radius of curvature of the
sweep path (Watt, 2000).
Put another way, the curvature of the main sweep path cannot
support the size of the
cross-sections at that point, creating a kink in the final
object at the point of
occurrence.
A solution to this problem is presented by Roche (1989), who
notes that crimping
corresponds to the intersection of two cross-sections. He
suggests that in areas where
crimping occurs, it can be removed by adjusting the radius of
curvature to make it
larger.
-
7/31/2019 Modeling the Human Ear_m2jd
23/61
2. Literary Review
16
Figure 2.13: Crimping caused by curve self-intersection
-
7/31/2019 Modeling the Human Ear_m2jd
24/61
3. Requirements and Analysis
3. Requirements and Analysis
17
This chapter presents an overview of the main objectives and the
approaches available
to achieve them, before giving details about the implementation
and mathematical
theory involved in generating an object using sweeping. The main
aims with respect to
developing the ear are briefly presented, followed by a more
detailed account of the
programs capabilities. The techniques to be used in generating
the ear are consideredalong with available solutions to potential
problems with generating swept surfaces,
and proposed parameterisation of the ear. Finally, as an
important part of any
experimental project, the proposed method of evaluation is
discussed.
3.1 Aims and Objectives
The central objective of this project is to investigate whether
sweeping is a suitable
technique by which to model the complex shape of the human ear.
In doing so, a
program which be produced which will aim to do just that. Some
of the main
considerations in developing the ear are detailed as
follows.
As briefly discussed in Chapter 2, there are two main areas for
consideration in
generating the ear model, in which previous attempts have been
lacking. The first
concerns ear shape, where capturing the extensive overlapping
involved in the curves
of the ear, has not been completely effectively achieved.
Secondly, given the huge
variation in peoples ears throughout the human race, the scope
for generating a wide
variety of ears with relative ease would be preferable. This is
again an attribute not
possessed by techniques previously used to generate the ear.
With the use of sweeping,
and effective parameterisation, these are both issues that it is
hoped can be solved, and
as such, are both central requirements of the generated
model.
The nature of the sweeping technique, involves approximations in
areas of its
implementation, such as interpolating between cross-sections. As
such, attaining a high
degree of accuracy in terms of anthropometrical proportions and
measurements is
unrealistic. The ear model produced will still be required to
possess a certain degree of
accuracy, but this can be more visually oriented, rather than by
exact measurement.
This concurs with previous examples of ear models discussed in
Section 2.2.1, which
were based on creating a realistic impression of an ear, rather
than a dimensionally
accurate representation.
Applications of a model of a human ear could be seen to lie in
two main areas; aiding
the manufacturing of hearing aids or other acoustic devices such
as in-ear headphonesand within the computer graphics fields of
human facial modelling and animation.
Given the accuracy to which the ear will be produced, the latter
is the most appropriate
application.
3.2 Program Capabilities
The primary requirement of the program is that it will be able
to generate a model of
an ear that will be visually evaluated, as realistically
resembling a human ear. It will
generate the ear as a swept surface, the details of which are
covered in the next section.
A secondary requirement of the program is that it has the scope
to generate multiple
ear variations based on the same framework by altering parameter
values only. Thedetails of this feature are discussed below.
-
7/31/2019 Modeling the Human Ear_m2jd
25/61
3. Requirements and Analysis
18
3.2.1 Ear Variation
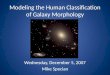
In looking at the ears of even just a handful of people, it
becomes clear that the
variation in individuals ears in enormous. As with other
features of the body, ear
shape and size can be inherited, for example, a well-known
inherited trait is the
attachment of the lowest point of the ear lobe to the face
(referred to as being lobe-
less). As a result of inheritance, family members are more
likely to show similaritiesbetween their ears than unrelated
people. However, Figure 3.1 demonstrates that even
between family members, the amount of variation in ear shape and
size is considerable.
It is commonly known that ear size varies with age and between
sexes and ear-shape is
often varied across different races as well. For example, the
length of the ear increases
with age.
Figure 3.1: The right ear of each member of a family unit
Given the huge range of ear measurements possible, a very useful
feature of the
program, would be to have a predefined set of default parameter
values which generate
a typical ear according to higher level parameters of age race
and sex. However,
anthropometric measurements of ears are quite limited and hard
to find especially in
relation to a persons age, gender or race. Three main sources of
measurement datawere found ((Algazi et al, 2001),(Differient et al,
1981),(Tilley et al, 1993)). The
second two of these were aimed at design and engineering
applications and although
the measurements were presented as averages for certain age
groups and specified
race, the data given was measurements of ear length only. The
most substantial survey
of ear size available is from a study in connection with
Head-related Transfer
Functions (HRTFs). HRTFs capture the sound localization cues
created by the
scattering of incident sound waves by the body and are defined
by head, shoulder and
ear shape (Algazi et al, 2001), thus anthropometric measurements
of these features
have been recorded. Algazi et al. (2001) present measurements
for ten different aspects
of the pinna (external ear), as shown in Figure 3.2 Due to the
area of application in
which the measurements are taken, the choice of anthropometry is
relevant to theunderstanding or estimation of HRTFs. Thus, for
example, no measurements are made
of the lobe area of the ear since this bears no influence over
sound localisation. The
data for each of the ten pinna measurements was obtained from 43
subjects (27 men
and 16 women) from the CIPIC Interface Laboratory, California,
where the studies
were being conducted. The results of the measurements (in cm)
are listed in Table 3.1.
-
7/31/2019 Modeling the Human Ear_m2jd
26/61
3. Requirements and Analysis
19
Var Measurement
d1 cavum conchaheight
1.91 0.18 19
d2 cymba conchaheight
0.68 0.12 35
d3 cavum conchawidth
1.58 0.28 35
d4 fossa height 1.51 0.33 44d5 pinna height 6.41 0.51 16
d6 pinna width 2.92 0.27 18
d7 intertragal incisurewidth
0.53 0.14 51
d8 cavum conchadepth
1.02 0.16 32
1 pinna rotationangle
24.01 6.59 55
2 pinna flare angle 28.53 6.70 47
Figure 3.2: Pinna Measurements
Table 3.1: Anthropometric Statistics, =100(2 / )
Given the data is not presented according to the type of person
(age, race, gender)
measured, the only value of this data in terms of modelling the
ear, is in ascertaining
conceivable ear measurements i.e. what dimension values comprise
a normal ear,
rather than defining a higher level of control.
Due to the lack of data available, defining a higher level of
control is not a feasible
option, i.e. it will not be possible to enable the program to
automatically generate ear
variations according to age, race and sex input parameters, and
a lower level of control
must be used. Different ears will be created by manually
altering more specific
parameters, such that visually pleasing ears are generated.
Parameters are discussed in
more detail in Section 3.3.1..
3.3 Sweeping the ear
The ear will be treated as a generalised cylinder. The
cross-sections will be varied
along the sweep curve using interpolation. This section sets out
the parameterisation of
the ear, and theory of the sweeping process intended to model
it. Any additional
information about most of the techniques discussed here can be
found in Chapter 3 of
Watts book, 3D Computer Graphics (2000).
3.3.1 Parameterisation of the Ear
The ear will be parameterised by a path curve defining the
outline shape of the ear and
the cross sectional curves and their position along the path
curve, defining local ear
shape at that point and the surrounding local area. The
parameters will be the control
point coordinates for the path curve, and for the cross
sections, the control point
coordinates and the position along the path curves at which they
will be placed. This
position will be represented as an integer indicating the path
curve segment and a
floating-point value between 0 and 1 indicating the parametric
position along the
segment in question.
This approach will result in there being a large number of
specific parameters, which isnot a particularly useable or
efficient parameterisation. However, for the purpose of
-
7/31/2019 Modeling the Human Ear_m2jd
27/61
3. Requirements and Analysis
20
this investigation, it is appropriate, and provides the level of
detail and flexibility in
defining the ear, that is required to generate the desired
result.
An ideal method of parameter input are a Bezier Curve Editor.
This would entail
default initial ear curves being generated and displayed on the
screen, then by selecting
the relevant cross section or path curve their shape or position
could be edited.
Guidelines would indicate the bounds of the curve of a normal
ear for the path andeach cross section when they were selected.
Once editing was completed, the curve
would be submitted and the control points for that curve
automatically stored, and
inputted to create the desired swept surface.
Other methods of input would be more manual approaches such as
an input file
containing control points and cross section positions in a
format readable by the
program or an input class containing similar data, which could
be obtained by calling
get methods for that class.
While a Bezier Curve Editor would make generating different ears
very quick and
efficient, time constraints for this project may mean that one
of the manual inputmethods would have to be adopted. However this
option could be made more efficient
by accompanying it with the use of an existing Bezier curve
drawing tool, where
points must be read off manually for each control point.
3.3.2 Sweeping Theory
The cross-sections will be formed by two-dimensional closed
curves placed onto the
sweep path curve at specific points. The position of a
cross-section on each segment of
the curve will have a value between 0 and 1, where position 0 is
the start of the curve
segment and position 1 is the end. The sweep path curve is a
three-dimensional opencurve onto which the cross-sections are
placed. It should be noted that if a curve editor
were incorporated into the final program, it would be advisable
to use a two-
dimensional curve editor, and apply a technique discussed by
Marriot (1991), to
compose the two-dimensional path together, to form
three-dimensional objects.
Both cross-sectional curves and sweep curves will be constructed
using cubic Bezier
curves segments. This segmented curve representation will be
used, as it is a relatively
simple method by which to create a complex curve of almost any
shape. The curve
segments used are cubic because lower degree curves do not
provide enough flexibility
in shape control, while curves with degree higher than three,
require more computation
and are less intuitive to use.
Bezier Curves
A Bezier curve is a space curve Q(u), defined in terms of a
parameter u (0 u 1). Itsfour control points determine the shape of
the curve, Pi (i = 0,1,2,3), where P0 and P3
are the endpoints of the curve, and P1 and P2 control its shape.
A Bezier curve is then
given by:
=
=3
0
)()(i
ii uBPuQ (2.1)
where Pi are the control points and Bi(u) are the Berstein
blending functions which
sum to 1 for 0 u 1:
-
7/31/2019 Modeling the Human Ear_m2jd
28/61
3. Requirements and Analysisand Analysis
21
21
B0(u) = (1-u)3
, B1(u) = 3u(1-u)2 , B2(u) = 3u2(1-u) , B3(u) = u3
B (u) = (1-u)03
, B (u) = 3u(1-u) , B (u) = 3u (1-u) , B (u) = u1 2 2 2 33
The control point definition of of Bezier curve segments means
that joining curve
segments together and sweeping are simplified, since operations
can involve the
control points of the curve, rather than the curve itself.
The control point definition of of Bezier curve segments means
that joining curve
segments together and sweeping are simplified, since operations
can involve the
control points of the curve, rather than the curve itself.
Joining Bezier Curve SegmentsJoining Bezier Curve Segments
Connecting curve segments to make up curves that are more
complex implies that
constraints must apply at the joins (Watt, 2000). The default
constraint is positional
continuity, which means that the end-point of the first curve
segment is co-incident
with the start point of the next curve segment. This is shown in
Figure 3.3(a) where
control points S3 and R0 are equal. If however, a smooth join is
required between
segments then first order (or tangential) continuity should be
used. First order
continuity means that the tangent vectors at the start of one
curve and the end of the
adjacent curve, match to within a constant. This type of
continuity is shown between
two curves in Figure 3.3(b) where control points S3 and R0 are
equal and therelationship, (S3 S2) = k(R1 R0), exists such that S2
and R1 are collinear (Maddock,
2003).
Connecting curve segments to make up curves that are more
complex implies that
constraints must apply at the joins (Watt, 2000). The default
constraint is positional
continuity, which means that the end-point of the first curve
segment is co-incident
with the start point of the next curve segment. This is shown in
Figure 3.3(a) where
control points S
3 and R0 are equal. If however, a smooth join is required
between
segments then first order (or tangential) continuity should be
used. First order
continuity means that the tangent vectors at the start of one
curve and the end of the
adjacent curve, match to within a constant. This type of
continuity is shown between
two curves in Figure 3.3(b) where control points S3 and R0 are
equal and therelationship, (S3 S2) = k(R1 R0), exists such that S2
and R1 are collinear (Maddock,
2003).
Figure 3.3(a) Figure 3.3(b)
Figure 3.3(a): Positional continuity
Figure 3.3(b): Tangential continuity
Due to the smooth curved form of the ear, first order continuity
will be used to join the
Bezier curve segments of both the cross-section curves and the
sweep path curves.
Practical Considerations
Solutions to the practical problems behind sweeping, discussed
in Section 2.5.2, must
also be incorporated into the process of generating the swept
ear surface. The problem
of crimping due to cross section self-intersection will be
solved using the method
suggested by Roche (1989), which essentially involves increasing
the radius of
curvature. This means that the path should be defined such that
it does not involve
areas where the direction of the curve changes particularly
sharply. Areas of the ear
that do involve high curvature can be modelled by altering the
cross section shape
rather than the path to reflect the ear shape. Doing this will
indirectly help solve the
curve to polygon procedure problem. Eliminating high areas of
curvature from the path
will mean that less computationally expensive subdivision mat be
applied and non-uniform curve subdivision may not be necessary in
evaluating the curves. Subdivision
-
7/31/2019 Modeling the Human Ear_m2jd
29/61
3. Requirements and Analysis
22
can be achieved using the less computationally expensive arc
length parameterisation
method or regular intervals.
The third practical problem is that of correctly orienting the
cross sections along the
path curve. The Frenet frame is an effective solution as long as
there are no degenerate
areas along the path curve. Areas of high curvature (and
therefore points of inflection)
along the path should be able to be avoided as described above,
but it is probable thatthere will be straight sections of the curve
and it is at these points that a violent twist
can occur in the progression of Frenet frames. As such the
initial reference frame will
be calculated as a Frenet frame, and then propagated along the
path curve using the
method by Bloomenthal or Sloan described in Section 2.5.2.
Cross-sectional Interpolation
Cross-sectional interpolation will be used to define
cross-sections between those
initially specified. The finite set of initial cross-sections
will be defined using Bezier
curve segments. It is possible that these cross-sections will
not all have the same
number of segments. To interpolate between cross-sections it is
essential that all cross-sections have the same number of segments.
A method can be used to achieve this by
redefining the cross-sections so they all have the same number
of segments as the
cross-section with the most segments (Marriott, 1992). Once all
cross-sections have an
equal number of segments, one of two interpolation techniques
may be applied; linear
interpolation or non-linear interpolation.
Given two cross-sectional curves, A and B, linear interpolation
finds the cross-
sectional curve, C, at the required position. Only two curves
are required for the linear
calculation that uses evenly spaced points between the two
curves. This method
produces inaccuracies causing jerkiness in the final model
especially when usingpolygonal representation when joining curve
segments together. This jerky effect is
illustrated in Figure 3.5(a) where the sudden change in surface
direction can be clearly
seen at the cross-sections.
Figure 3.5(a): Liner Interpolation Figure 3.5(b): Non-linear
Interpolation
Non-linear interpolation overcomes the jerkiness of linear
interpolation by using a
curve-fitting scheme. This method requires four initial
cross-sections, two either side
of the required position for the interpolated cross-section.
These four cross-sections are
used to fit a curve between them all, from which a set of Bezier
Curves are calculated,
and form the new cross-section. The smooth effect of non-linear
interpolation is
illustrated in Figure 3.5(b).
-
7/31/2019 Modeling the Human Ear_m2jd
30/61
3. Requirements and Analysis
23
Summary
Using the techniques described above, the sweeping method
produces a series of bi-
cubic Bezier patches representing the surface of the ear.
3.3.3 Rendering the ear
For the purpose of this project the ear only needs to be
displayed so that it can be
visually evaluated. As such, it will not be necessary to display
it as a polygon mesh,
but only as a shaded surface. This simplifies the rendering
procedure, as polygon
intersection algorithms will not be required. The surface will
be evaluated at regular
intervals and displayed as a series of shaded polygons. The
evaluation interval size will
be directly dependant on how frequent it needs to be to make the
surface appear
smooth.
To render the parametrically represented surface of the ear one
of two types of
algorithm are available. Algorithms that render directly from
the parametric
description, or those that approximate the surface by a polygon
mesh (Watt, 2000).The second option is easier to implement, and
computationally less expensive, and a
variation of this method will be used for the ear model.
To create a series of polygons, the patches must be subdivided.
Uniform subdivision
can be achieved by either applying a subdivision algorithm,
which recursively divides
patches into quarters terminating after n subdivisions, or by
evaluating the surface at
set intervals. Alternatively, non-uniform subdivision is
achieved in a similar way to
uniform subdivision, except that each subdivision product is
tested for flatness so that
subdivision terminates when a predefined flatness is
reached.
Given uniform subdivision is applied regardless of curvature,
depending on the
number of subdivisions (or frequency of sampling) it may not
cope well with high
areas of curvature i.e. the resulting surface would not appear
smooth. Non-uniform
subdivision aims to combat this problem, but there are
disadvantages to this technique.
Patch tearing can occur, where holes can appear between patches.
This is due to a
patch boundary being approximated by a different number of
straight lines than a
neighbouring patch. A solution is to test the polygon normals
and if the tear is visible
to the eye, an extra polygon must be added. Non-uniform
subdivision is also
considerably more computationally expensive due to the flatness
test, which must be
applied after every subdivision.
Since the ear does not have a particularly shiny surface, it can
be relatively realistically
shaded using a basic Gouraud shading option.Additionally, the
use of polygons makesshading relatively quick and easy using the
polygon vertex normals.
3.3.4 Summary
The sweeping method presented uses both patches and polygons to
get the most out of
the advantages of both representations. For example, the
smoothness of patches is
employed, as is the ease of shading when using a polygon mesh.
The advantages of
both representations are presented in Maddocks comparison
between polygons and
parametric patches, which considers a wide range of aspects of
modelling, (Maddock,2002).
-
7/31/2019 Modeling the Human Ear_m2jd
31/61
3. Requirements and Analysis
24
3.4 Evaluation of the Ear Model
Evaluation is a key area of any experimental work. In this case,
it is especially
important as there needs to be some method by which to determine
whether a realistic
model of a human ear has been achieved. There are essentially
two angles from which
this issue may be approached, evaluation by visual appearance
and evaluation by
actual measurement. Evaluation by appearance is the most
relevant method, given thenature of the final ear models as
discussed in Section 3.1. The visual appearance of the
ear is the most obviously an important factor when considering
the reality of the
model. However, given the position of the ear on the head, we
are accustomed to
seeing the ear from a face-to-face perspective or from the side.
Thus, factors such as
the depth of the ear (z component) or distance from the head
will be less visually
detectable as being incorrect or abnormal by the average
person.
Peoples opinions on the visual appearance of the ear model
produced will be
invaluable in determining whether a realistic looking ear shape
has been produced.
Ideally, the evaluation would consist of a group of volunteers
comparing a set of ears
comprised of both real and computer generated ears. For the
purpose of the rest of thischapter, the group of people evaluating
the ears will be referred to as the testers. As
explained in Section 3.1, ear shape and size varies dependant on
the age, race and
gender of a person. As such, it seems logical to assume that a
persons perception of
what a normal or realistic ear would look like may vary
dependant of their age, race
or gender. As such, the testers will comprise a cross-section of
people of mixed age,
race and gender. The ears will be evaluated in the form of
images from various angles
either on the screen. The details of three proposed evaluation
methods are detailed in
the next few sections.
The evaluation of the ear models produced will be solely shape
oriented, discountingfactors such as texture. The evaluation will
investigate the following issues: realism of
the ear shapes produced; whether any improvement has been
achieved compared to
previous attempts; the scope for generating a variety of
realistic ears; intuitiveness of
the technique; potential for producing a specific ear.
3.4.1 Realism of ears produced
The realism of the shape of the ear is one of the main aspects
to be assessed. The
proposed method of evaluation is to present the tester with a
group of ears, composed
of both computer-generated ears and photographic images of an
ear and ask them to
select those, which they believe are most realistic in shape.
The main obstacleassociated with this evaluation method is the
difference in rendering of the computer-
generated ear and the photographic image. The testers would
instantly spot the real
ear due to the photographic quality of the picture thus
nullifying the test. The proposed
solution to the problem is to destroy the rendering of both
images to the same level
such that the shape of the two ears can be compared fairly. An
example of this would
be to apply edge effects and noise to an image in PaintShop Pro
thus destroying the
rendering such that the photogr