Embed Size (px)
Citation preview

Modeling of Piezoelectric Energy Harvesting from anL-shaped Beam-mass Structure with an Application to UAVs
ALPER ERTURK,1,* JAMIL M. RENNO2AND DANIEL J. INMAN
2
1Department of Engineering Science and Mechanics, Center for Intelligent Material Systems and StructuresVirginia Tech, Blacksburg, VA 24061, USA
2Department of Mechanical Engineering, Center for Intelligent Material Systemsand Structures, Virginia Tech, Blacksburg, VA 24061, USA
ABSTRACT: Cantilevered piezoelectric energy harvesters have been extensively investigatedin the literature of energy harvesting. As an alternative to conventional cantileveredbeams, this article presents the L-shaped beam-mass structure as a new piezoelectric energyharvester configuration. This structure can be tuned to have the first two natural frequenciesrelatively close to each other, resulting in the possibility of a broader band energy harvestingsystem. This article describes the important features of the L-shaped piezoelectricenergy harvester configuration and develops a linear distributed parameter model forpredicting the electromechanically coupled voltage response and displacement response of theharvester structure. After deriving the coupled distributed parameter model, a case study ispresented to investigate the electrical power generation performance of the L-shaped energyharvester. A direct application of the L-shaped piezoelectric energy harvester configurationis proposed for use as landing gears in unmanned air vehicle applications and a case studyis presented where the results of the L-shaped – energy harvester – landing gear arefavorably compared against the published experimental results of a curved beam configurationused for the same purpose.
Key Words: piezoelectricity, energy harvesting, unmanned air vehicles.
INTRODUCTION
VIBRATION-BASED energy harvesting has beeninvestigated by numerous researchers, starting
with the early work of Williams and Yates (1996),where the possible vibration-to-electric energy conver-sion mechanisms were described as piezoelectric,electromagnetic, and electrostatic transductions.These three transduction mechanisms have beenstudied by researchers extensively in the last decade(Beeby et al., 2006). Theoretical and experimentalpapers are available on modeling and applications ofpiezoelectric (Anton and Sodano, 2007), electromag-netic (Arnold, 2007), and electrostatic (Mitchesonet al., 2004) energy harvesters. Among these threealternatives for vibration-to-electric energy conversion,piezoelectric transduction has received the mostattention and its literature has already been summar-ized in three review articles in the last 2 years(Anton and Sodano, 2007; Priya, 2007; Cook-Chennault et al., 2008).
As can be found in the aforementioned review articles,a commonly used piezoelectric energy harvester config-uration is a cantilevered beam with one or two piezo-ceramic layers (a unimorph or a bimorph with thehistorical definitions, respectively). Typically, the canti-levered energy harvester is located on a vibrating hoststructure and the dynamic bending strain induced in thepiezoceramic layer(s) results in an alternating electricpotential difference between the electrodes covering thepiezoceramic layer(s). Practical applications (Anton andSodano, 2007; Priya, 2007; Cook-Chennault et al., 2008)and mathematical modeling (Roundy et al., 2003;Sodano et al., 2004; duToit et al., 2005; Erturk andInman, 2008a) of cantilevered piezoelectric energyharvesters have been investigated by many researchersin the last 5 years. Practical applications are limited tolow-power systems (such as small sensors) (Anton andSodano, 2007; Priya, 2007; Cook-Chennault et al., 2008)and the respective electromechanical models includesingle-degree-of-freedom (Roundy et al., 2003; duToitet al., 2005), approximate distributed parameter(Sodano et al., 2004; duToit et al., 2005) and closed-form distributed parameter (Erturk and Inman, 2008a)solutions for predicting the coupled system dynamics
*Author to whom correspondence should be addressed.E-mail: [email protected] 1 and 4–7 appear in color online: http://jim.sagepub.com
JOURNAL OF INTELLIGENT MATERIAL SYSTEMS AND STRUCTURES, Vol. 20—March 2009 529
1045-389X/09/05 0529–16 $10.00/0 DOI: 10.1177/1045389X08098096� SAGE Publications 2009
Los Angeles, London, New Delhi and Singapore

of these piezoelectric energy harvesters. Usually,cantilevered energy harvesters are designed to have aproof mass, which can be tuned to have the fundamentalnatural frequency of the harvester beam close to adominant excitation frequency available in the ambientvibration energy spectrum. Although a cantileveredbeam is a simple structure that is not very proneto aggressive improvements, the literature includesa considerable effort to improve the electrical outputsof this configuration. Baker et al. (2005) examined theeffect of geometry of cantilevered piezoelectric beamson power density to find better alternatives to therectangular beam shape. Erturk et al. (2008b) discussedhow to arrange the electrodes of cantilevered beams andof beams with different boundary conditions to avoidvoltage cancellations in energy harvesting. Hu et al.(2007) introduced an axial preload to the conventionalcantilevered bimorph configuration to adjust its naturalfrequency to handle varying-frequency excitations.Hence, the conventional cantilevered beam configura-tion as a piezoelectric energy harvester has been studiedextensively in the literature and a considerable efforthas been made to optimize this simple structure forimproved electrical outputs.The aim of this article is to introduce the L-shaped
beam-mass structure as a new piezoelectric energyharvester configuration and to analyze its electromecha-nical behavior. This structure has been investigated indetail in the literature of nonlinear dynamics in thepast two decades (Haddow et al., 1984; Balachandranand Nayfeh, 1990) and the relevant nonlinear phenom-ena observed due to the two-to-one internalresonance (mainly mode saturation) have found inter-esting applications (Oueini et al., 1998). Here weexploit the unique linear dynamics of the L-shapedstructure combined with piezoelectric materials toproduce a broader band energy harvester than isavailable with a simple cantilever configuration. This isfollowed by a case study presented to analyze the perfo-rmance of the L-shaped piezoelectric energy harvester.Performance of the harvester as a UAV landing gear isalso compared with that of a curved energy harvesterbeam used for the same purpose in a recent study(Magoteaux, 2007).
FEATURES OF THE L-SHAPED BEAM-MASS
STRUCTURE
In this section, some unique features of the L-shapedbeam-mass structure are discussed. Although nonlinearmodeling is not addressed in this paper, a possible use ofthe two-to-one internal resonance in energy harvesting isdiscussed to enhance piezoelectric power generation
from base excitation. Then, an advantage of theL-shaped beam-mass structure as a broadband energyharvester is discussed.
Nonlinear Interactions due to Two-to-one Internal
Resonance
The L-shaped beam-mass structure has been investi-gated in the literature of nonlinear dynamics by Haddowet al. (1984) and Balachandran and Nayfeh (1990). Asmentioned by Nayfeh and Mook (1979), multi-degree-of-freedom (MDOF) systems having two or more oftheir natural frequencies commensurable or nearly so(i.e., there exist integers a1, . . . , an such thata1!1þ a2!2þ � � � þ an!nffi 0 where !1, . . . ,!n are thenatural frequencies) may possess internal resonances.The simplest possible MDOF system is a 2-DOF systemand the condition of having !2ffi 2!1 is a simple case forrealizing an internal resonance. This particular case iscalled the two-to-one internal resonance. Although basicstructures like cantilevered beams cannot be designed(passively) to obtain !2ffi 2!1, it was shown in theliterature (Haddow et al., 1984) that an L-shaped beam-mass structure could have this internal resonancecondition (with the third and the higher modes farremoved from the first two modes). A structure that hasa two-to-one internal resonance and quadratic non-linearities may exhibit energy exchange between the firsttwo modes, or the so-called saturation phenomenon incase of sinusoidal excitation near a primary resonance(Nayfeh and Mook, 1979). Modal energy exchange ischaracterized by a continuous back and forth energyexchange between the first two modes. Mode saturationoccurs when the excitation amplitude exceeds a certainvalue, after which the amplitude of the vibration modethat is directly excited becomes independent of the levelof excitation and the energy is transferred to the othermode (Nayfeh and Mook, 1979). As a part of ourongoing research, we are investigating the possible useof these unique features of the L-shaped beam-massstructure for piezoelectric energy harvesting. Onepractical use of nonlinear interactions for piezoelectricenergy harvesting is the possibility of obtaining aresponse at a flexible vibration mode (mode 1) byexciting the harvester at the frequency of a relatively stiffvibration mode (mode 2). That is, the second vibrationmode (as the primary resonance) can be directly excitedand a voltage response at the first vibration mode canpossibly be obtained for large base accelerations due tothe saturation phenomenon. This useful scenario isbeyond the discussion provided in this article; however,it seems to be realizable owing to the aforementionedprevious work on the passive L-shaped beam-massstructure. A common criticism of the existing linear
530 A. ERTURK ET AL.

work concerns whether or not the results will bedestroyed if the harvester is driven into a nonlinearregion at resonance. The saturation phenomenonassociated with the L-shaped beam-mass structure andother MDOF systems with internal resonances mayprovide a very useful solution, through the possibility oftransferring the input mechanical energy to a moreflexible mode and extracting the electrical response atthe flexible mode.
L-shaped Beam-mass Structure as a Broadband Energy
Harvester
Besides the nonlinear interactions between the vibra-tion modes, the structure is also advantageous as abroadband energy harvester. In most research on piezo-electric energy harvesting, the cantilevered harvesterbeam has been assumed to be excited at or around itsfirst (fundamental) natural frequency. In other words, thefirst natural frequency of the harvester is tuned to afrequency that is dominant in the ambient vibrationenergy. This tuning process is usually realized by meansof a proof mass. In reality, however, most ambientvibration sources display random or varying-frequencybehavior in time (see, for instance, the random accelera-tion history of an automobile compressor measured bySodano et al. (2005) or the sample frequency spectrapresented by Roundy et al. (2003)). Hence, in general,ambient vibrations cannot be represented by a singleharmonic function. As a consequence, vibration energyavailable in the ambient excites the higher vibrationmodes of the harvester structure as well. The nearestvibration mode to the fundamental mode is simply thesecond mode, and this mode gains importance forrandom or varying-frequency excitations. Having avibration mode close to the fundamental vibrationmode is preferable for broadband energy harvesting.
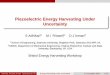
As far as the conventional cantilevered beam configura-tion with uniform cross-section is concerned, it isstraightforward to show that the second natural fre-quency is more than 6 times the first natural frequency inthe absence of a proof mass (!2ffi 6.27!1). This is simplyobtained by taking the ratio of the squares of thedimensionless frequency parameters (eigenvalues)obtained from the respective eigensolution of aclamped-free uniform beam without a proof mass. Thepresence of a proof mass increases the relative spacing of!1 and !2 of the harvester on the frequency axis evenmore. Figure 1(a) displays the variation of the dimen-sionless natural frequencies with dimensionless proofmass-to-beam mass ratio for the first two vibrationmodes. Taking the ratio of the curves in Figure 1(a) yields!2/!1, which is a direct measure of the relative spacingbetween the first two vibration modes on the frequencyaxis, and the variation of this ratio with proof mass-to-beam mass ratio is plotted in Figure 1(b). As proof mass-to-beammass ratio (Mproof/Mbeam) changes from 0 to 10,the ratio between the first two natural frequencies (!2/!1)increases from 6.27 to 28.7. According to Figure 1(b), thespacing between the first two vibration modes increasesmonotonically with increasing proof mass and theminimum amount of relative spacing corresponds to theno proof mass case (with !2ffi 6.27!1).
As common practice, the designer tunes the firstnatural frequency of the harvester beam to a frequency(!1) that is dominant in the ambient vibration spectrum.This practice automatically assigns a certain value (!2)to the second natural frequency, and we knowfrom Figure 1 that the second natural frequency willnot be very close to the first one (at least !2ffi 6.27!1).As a consequence, the response of the harvester to theharmonics in the ambient vibration lying in a very widefrequency range between !1 and !2 will be considerablyweak for random or varying-frequency excitations.
25
2520
30
2015
1510
105
500 02 24 46 68 810 10
Mproof/Mbeam Mproof/Mbeam
Dim
ensi
onle
ss n
atur
alfr
eque
ncy
Mode 1Mode 2
Nat
ural
freq
uenc
y ra
tio(ω
2/ω
1)
(a) (b)
Figure 1. Variation of the (a) first two dimensionless natural frequencies and (b) their ratio with proof mass-to-beam mass ratio for a conventionaluniform cantilevered beam.
L-shaped Piezoelectric Energy Harvester 531

With this consideration, the L-shaped energy harvesterconfiguration proposed in this work has an importantadvantage over the conventional cantilevered har-vesters (with or without a proof mass). While selectinga dominant frequency (!1) in the ambient vibrationspectrum and setting the first natural frequency ofthe L-shaped energy harvester to this value, thegeometric parameters of the harvester can be tuned tohave a second natural frequency (!2) that is notvery far away from the first natural frequency.For instance, as mentioned before and as will beshown in the case study, !2ffi 2!1 is a realizable casefor the L-shaped configuration whereas this case cannotbe realized for the conventional cantilevered beams.Thus, it can be concluded that the L-shaped energyharvester configuration has better broadband energyharvester characteristics and is less sensitive to varia-tions in the dominant excitation frequency whencompared to the conventional cantilevered beamconfiguration.
ELECTROMECHANICAL MODELING
In this section, we summarize the electromechanicalmodeling of the L-shaped unimorph harvester shown inFigure 2(a). The electromechanically coupled modelingapproach is based on the experimentally validated(Erturk and Inman, 2008c) coupled distributed param-eter model proposed by Erturk and Inman (2008a). Asdepicted in Figure 2(a), this structure is a combinationof one horizontal and one vertical thin beam with twolumped masses (M1 and M2). The structure is excited bythe vertical base acceleration aB(t). The substructure andpiezoceramic layers are geometrically uniform alongtheir longitudinal directions. The lumped masses and thelocation of the second lumped mass (M2) on the verticalbeam are important tuning parameters for the systemwhich make it possible to obtain the two-to-one internalresonance for the nonlinear modal interactions men-tioned in the previous section.
The vibratory motion of the harvester is examined inthree segments (regions), <k, equipped with the refer-ence frames (xk, yk), such that (Figure 2(b)):
<k ¼ xkj0 � xk � Lkf g; ð1Þ
where k¼ 1, 2, 3 in Equation (1) and hereafter. Eachsegment is modeled for the general case of differentlengths Lk, mass per unit length terms mk, and flexuralstiffness terms YIk. Therefore, the substructure andpiezoceramic layers as well as their geometric propertiescan be taken to be different for each segment <k.The piezoceramic layers are covered with conductiveelectrode pairs and they are poled in the thicknessdirection (3-direction with the notation of piezoelectri-city). The direction of mechanical strain in each segmentis the longitudinal direction (1-direction with the nota-tion of piezoelectricity) due to bending deformations. It isassumed that the piezoceramic layer and the substructurelayer are perfectly bonded to each other. Segments <1,<2, and <3 have separate electrode pairs whose leadsare connected to a single resistive load (Rl) in series. Notethat considering a resistive load in the electrical circuit is acommon practice in modeling of piezoelectric energyharvesters for persistent vibration inputs. The aim here isto model and investigate the basic electromechanicalbehavior of the harvester for a resistive electrical load.Circuitry-based discussions with more sophisticatedenergy harvesting circuit topologies can be found in theliterature (e.g., Ottman et al., 2002). Although theconfiguration is taken as a unimorph in the followinganalysis, one might as well consider the bimorph casewith a similar procedure. The bimorph configurationallows combining the electrical outputs of differentsegments in series or in parallel, depending on the voltageor current requirements (Erturk and Inman, 2008c).
Modal Analysis for Free Vibrations
Since the aspect ratios of typical energy harvesterconfigurations allow neglect of the effects of shear
Substructure layer
Piezoceramic layer
Vibratingsurface
aB(t)
L1
m1, YI1
m2, YI2
m3, YI3
M2
M1
L3
L2
(a)
Y1
X1
X2
X3
Y3
Y2
W1
W2
W3
(b)
Figure 2. (a) Schematic of the L-shaped piezoelectric energy harvester, (b) the reference frames and the displacement variables.
532 A. ERTURK ET AL.

deformation and rotary inertia, the followingmodeling procedure is based on the Euler-Bernoullibeam assumptions. Reasonably, we are interested inbending vibrations of the harvester and, therefore, thelongitudinal vibrations of the beam segments areignored by assuming the segments to be axially rigid.Geometrically small oscillations are considered herealong with the assumption of linearly elastic materialbehavior. Equations of motion for undamped freevibrations of each segment in its lateral direction canbe written as:
@2ðMbÞkðxk, tÞ
@x2kþmk
@2wkðxk, tÞ
@t2
þ �2kM2g@2wkðxk, tÞ
@x2k¼ 0, xk 2 <k,
ð2Þ
where mk is the mass per unit length, (Mb)k (wk, t) isthe bending moment, and wk(xk, t) is the transversevibratory displacement of segment <k, M2 is the secondlumped mass (at x2¼L2), g is the gravitational accelera-tion, and �rs is Kronecker delta (defined as being equal tounity for r¼ s and equal to zero for r 6¼ s). It is importantto note that the piezoelectric effect is included inthe bending moment (Mb)k (wk, t), which can beexpanded into a term related to the bending stiffnessYIk and a term related to the voltage �k(t) across theelectrodes of segment <k (Erturk and Inman, 2008a).The expressions of mk and YIk for the unimorph cross-section can be found in the Appendix. The dissipativeeffects due to internal and external damping mecha-nisms will be introduced as modal damping later.Note that the weight M2g of the second lumped massacts as an axial load for segment <2. The boundaryconditions, compatibility, and continuity relations arestated next.The geometric boundary conditions at the clamped
end (x1¼ 0) are:
w1ð0, tÞ ¼ 0,@w1ðx1, tÞ
@x1
����x1¼0
¼ 0: ð3aÞ
The linear/angular displacement and force/momentequilibrium relations at the locations of the lumpedmasses are:
w2ð0, tÞ ¼ 0,@w1ðx1, tÞ
@x1
����x1¼L1
¼@w2ðx2, tÞ
@x2
����x2¼0
, ð3bÞ
YI1@3w1ðx1, tÞ
@x31
����x1¼L1
¼ ðM1 þM2 þm2L2 þm3L3Þ@2w1ðx1, tÞ
@t2
����x1¼L1
, ð3cÞ
YI1@2w1ðx1, tÞ
@x21
����x1¼L1
þJ1@3w1ðx1, tÞ
@t2@x1
����x1¼L1
¼ YI2@2w2ðx2, tÞ
@x22
����x2¼0
, ð3dÞ
w2ðL2, tÞ ¼ w3ð0, tÞ,@w2ðx2, tÞ
@x2
����x2¼L2
¼@w3ðx3, tÞ
@x3
����x3¼0
, ð3eÞ
M2g@w2ðx2, tÞ
@x2
����x2¼L2
þYI2@3w2ðx2, tÞ
@x32
����x2¼L2
¼ YI3@3w3ðx3, tÞ
@x33
�����x3¼0
þM2@2w2ðx2, tÞ
@t2
����x2¼L2
, ð3f Þ
YI2@2w2ðx2, tÞ
@x22
����x2¼L2
þJ2@3w2ðx2, tÞ
@t2@x2
����x2¼L2
¼ YI3@2w3ðx3, tÞ
@x23
����x3¼0
, ð3gÞ
where J1 and J2 are the rotary inertias of the lumpedmasses M1 and M2, respectively. Finally, the naturalboundary conditions at the free end of the harvester canbe stated as:
YI3@3w3ðx3,tÞ
@x33
�����x3¼L3
¼ 0, YI3@2w3ðx3, tÞ
@x23
����x3¼L3
¼ 0: ð3hÞ
Based on the expansion theorem, the vibratorymotion of beam segment <k can be represented by anabsolutely and uniformly convergent series of theeigenfunctions as:
wkðxk, tÞ ¼X1r¼1
�krðxkÞ�rðtÞ, xk 2 <k, ð4Þ
where �r(t) is the modal response of the r-th vibrationmode and the piecewise-defined eigenfunctions of thestructure are:
�1rðx1Þ ¼ A1r sinð�rx1Þ þ B1r cosð�rx1Þ
þ C1r sinhð�rx1Þ þD1r coshð�rx1Þ, ð5aÞ
�2rðx2Þ ¼ A2r sinð�rx2Þ þ B2r cosð�rx2Þ
þ C2r sinhð�rx2Þ þD2r coshð�rx2Þ, ð5bÞ
�3rðx3Þ ¼ A3r sinðrx3Þ þ B3r cosðrx3Þ
þ C3r sinhðrx3Þ þD3r coshðrx3Þ: ð5cÞ
L-shaped Piezoelectric Energy Harvester 533

The above eigenfunctions are obtained through theseparation of variables solution of the respective partialdifferential equations given by Equation (2).For harmonic oscillations in time domain, the
relations between the frequency parameters of differentsegments of the structure, natural frequencies, and thestructural parameters can be obtained as (Rao, 2007):
�4r ¼ !2r
m1
YI1, 4
r ¼ !2r
m3
YI3,
�2r ¼
2þ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2
4þ !2
r
m2
YI2
s,
�2r ¼ �
2þ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2
4þ !2
r
m2
YI2,
s ¼
M2g
YI2
ð6Þ
where !r is the undamped natural frequency of the r-thvibration mode. Note that the above modal analysis isgiven for the short circuit conditions of the system (i.e.,Rl ! 0, where Rl is the load resistance). The undampednatural frequencies (!r) are approximately the shortcircuit resonance frequencies (!sc
r ) of the system for lightmechanical damping (since the voltage feedback in thebeam equation tends to zero for Rl ! 0). Due to thepiezoelectric coupling in the mechanical equation (whichis embedded in the bending moment term in Equation (2)),the short circuit resonance frequency !sc
r of the r-thvibration mode shifts to the open circuit resonancefrequency !oc
r as Rl !1. For nonzero and finite valuesof load resistance, the resonance frequency of the r-thvibration mode takes a value between the short circuitand the open circuit resonance frequencies (Erturk andInman, 2008a,c).As a common practice, substituting Equation (4)
in Equations (3a)–(3h) results in an eigenvalueproblem. Using the differential eigensolution procedure,the resulting 12� 12 coefficient matrix is forced to besingular and the natural frequencies of the structure areobtained from the resulting characteristic equation. Thenatural frequencies are then used in Equations (5a)–(5c)and Equation (6) to find the eigenfunctions ofeach segment. In Equations (5a)–(5c), {Akr, Bkr, Ckr,Dkr,} are the modal coefficients of the eigenfunctiondefined over segment <k, respectively. Therefore,the modal contributions of the eigenfunctions in theseries expansions depend on these sets of modalcoefficients. It is then required to normalize thepiecewise-defined (but continuous) eigenfunctions overthe entire domain <1 [ <2 [ <3. In order to beconsistent with the formulation proposed by Erturkand Inman (2008a) for a unimorph cantilevered beam,the piecewise-defined eigenfunctions of the structure
are mass normalized according to the orthogonalitycondition given by:
X3k¼1
ZLk
0
mk�krðxkÞ�ksðxkÞdxk
þ M1 þM2 þm2L2 þm3L3ð Þ�1rðL1Þ
� �1sðL1Þ þM2�2rðL2Þ�2sðL2Þ
þ J1d�1rðx1Þ
dx1
����x1¼L1
d�1sðx1Þ
dx1
����x1¼L1
þ J2d�2rðx2Þ
dx2
����x2¼L2
d�2sðx2Þ
dx2
����x2¼L2
¼ �rs,
ð7Þ
and its stiffness counterpart (which is automaticallysatisfied when Equation (7) is satisfied).
Electromechanical Equations for General Base Excitation
In order to derive the electromechanical equationsof the harvester, one should first consider the effect ofmechanical forcing in the system. Since the baseexcitation is in the vertical direction in the physicalcoordinates (which is the y1-direction in Figure 2(b)), thedirect excitation of the structure is due to its own inertiain the same direction. Therefore, as one is interested inbending vibrations of the harvester, it is straightforwardto see from Figure 2(b) that the forcing will affectEquation (2) for k¼ 1 in the physical coordinates.However, the entire structure will be vibrating due tothe formulation given in the previous section. Aftersubstituting Equation (4) into Equation (2) and applyingthe orthogonality conditions, the forced equation ofmotion can be written in the modal coordinates as:
d2�rðtÞ
dt2þ2�r!r
d�rðtÞ
dtþ!2
r�rðtÞþX3k¼1
�krvkðtÞ ¼NrðtÞ, ð8Þ
where �r is the viscous modal damping ratio of the r-thvibration mode,1 �k(t) is the voltage across the electrodesin segment <k,�kr is the modal electromechanicalcoupling term and Nr(t) is the modal mechanical forcingfunction such that:
�kr ¼ #kd�krðxkÞ
dxk
����Lk
0
, ð9aÞ
NrðtÞ ¼ �hm1
ZL1
0
�1rðx1Þdx1þ
M1 þM2 þm2L2 þm3L3ð Þ�1rðL1Þ
iaBðtÞ: ð9bÞ
1For a detailed discussion on how to relate the modal damping ratio to the internal (strain rate) and external (air) damping terms based on the proportional dampingassumption, the reader is referred to Erturk and Inman (2008a, 2008d).
534 A. ERTURK ET AL.

Here, #k is the coupling term in the physicalcoordinates for the piezoceramic layer in <k and it isgiven in the Appendix. The modal forcing function givenby Equation (9b) is due to the lateral inertia of thedistributed mass in <1 as well as the lumped massat the boundary x1¼L1, which includes the masses ofthe vertical beam segments, and the lumped masses M1
and M2. Note that in the modal forcing function theforcing term due to external damping effect is neglected(Erturk and Inman, 2008d).Figure 3 displays the electrical circuit of the L-shaped
energy harvester where the electrical outputs of thepiezoceramic layers of segments <1, <2 and <3 arecombined series and connected to a resistive load Rl.Each piezoceramic layer is shown as a current sourcealong with its internal (or inherent) capacitance con-nected in parallel. The electric current ik(t) produced ineach segment <k is given by:
ikðtÞ ¼X1r¼1
krd�rðtÞ
dtð10Þ
where:
kr ¼ �ðd31ÞkðYpÞkðhpcÞkbkd�krðxkÞ
dxk
����Lk
0
: ð11Þ
In Equation (11), (d31)k is the piezoelectric constant,(Yp)k is Young’s modulus (i.e., elastic stiffness atconstant electric field), bk is the width of the piezo-ceramic layer and (hpc)k is the distance between thecenter of the piezoceramic layer and the neutral axis ofthe unimorph cross-section in <k (see the Appendix).Note that the above form of Equation (10) assumes theelectrodes of <1, <2 and <3 to be insulated from eachother, i.e., they are discontinuous at x1¼L1 and x2¼L2.As can be seen from Equations (10) and (11), theelectric current generated in each segment is propor-tional to the bending slope difference at the electrodeboundaries. This is due to the fact that the electriccurrent is the time rate of change of the electricdisplacement integrated over the electrode area, where
the electric displacement is proportional to thecurvature of the beam (Erturk and Inman, 2008a, b).Therefore, one should be careful about the modeshapes of the structure when combining the currentoutputs. Otherwise, depending on the mode shapes,cancellations of the current outputs are possible asdemonstrated in the following case study.
The internal capacitance (Cp)k of the piezoceramiclayer in segment <k can be obtained from:
ðCpÞk ¼"S33� �
kbkLk
ðhpÞk, ð12Þ
where ð"S33Þk is the permittivity of the piezoceramiclayer at constant strain and ðhpÞk is the thickness ofthe piezoceramic layer. Note that the form ofEquation (12) assumes that the entire length of thepiezoceramic layer in segment <k is covered withcontinuous electrodes.
Applying the Kirchhoff Laws to the circuit shown inFigure 3 and employing Equation (10) results in thefollowing three equations for �1(t), �2(t) and �3(t):
1
Rlv1ðtÞ þ ðCpÞ1
dv1ðtÞ
dtþ
1
Rlv2ðtÞ
þ1
Rlv3ðtÞ ¼
X1r¼1
1rd�rðtÞ
dt, ð13aÞ
1
Rlv1ðtÞ þ
1
Rlv2ðtÞ þ ðCpÞ2
dv2ðtÞ
dt
þ1
Rlv3ðtÞ ¼
X1r¼1
2rd�rðtÞ
dt, ð13bÞ
1
Rlv1ðtÞ þ
1
Rlv2ðtÞ þ
1
Rlv3ðtÞ
þ ðCpÞ3dv3ðtÞ
dt¼X1r¼1
3rd�rðtÞ
dt: ð13cÞ
Equation (8) and Equations (13a)–(13c) constitutefour ordinary differential equations for the fourunknowns �1(t), �2(t), �3(t), and �r(t). These equationsare the electromechanical equations of the L-shapedenergy harvester. The voltage response across theresistive load is simply;
vðtÞ ¼X3k¼1
vkðtÞ, ð14Þ
and the coupled mechanical response of the harvester inthe desired segment can be obtained by using �r(t) inEquation (4) along with the eigenfunctions, which arenormalized according to Equation (7).
i1(t) i2(t) i3(t)
v1(t) v2(t) v3(t)
v(t )
Rl
(Cp)1 (Cp)2 (Cp)3
Figure 3. Electrical circuit of the L-shaped piezoelectric energyharvester (series connection).
L-shaped Piezoelectric Energy Harvester 535

Coupled Voltage Response and Vibration Response
for Harmonic Base Excitation
As is common practice in the energy harvestingliterature, we assume the base acceleration to beharmonic of the form aB(t)¼ABe
j!t where AB is theamplitude of the base acceleration, ! is the excitationfrequency, and j is the unit imaginary number. Forlinear oscillations, the steady state expressions for themodal mechanical response �r(t) and the voltageresponse �k(t) of the harvester can be written as:
�rðtÞ ¼ Hrej!t, vkðtÞ ¼ Vke
j!t, ð15Þ
respectively, where Hr and Vk are the complex valuedamplitudes. Using Equation (8) and Equation (15)results in the following relationship:
Hr ¼lrAB �
P3k¼1 �krVk
!2r � !
2 þ j 2�r!r!, ð16Þ
where
lr ¼ �hm1
ZL1
0
�1rðx1Þdx1
þðM1 þM2 þm2L2 þm3L3Þ�1rðL1Þ
i: ð17Þ
Eliminating the modal mechanical response term inEquations (13a)–(13c) results in three equations for V1,V2, and V3 which can be written in the contractednotation as:
X3k¼1
QmkVk ¼ Pm, where m ¼ 1, 2, 3: ð18Þ
Here,
Qmk ¼1
Rlþ j!ðCpÞm�mk þ
X1r¼1
j! mr�kr!2r � !
2 þ j 2�r!r!,
Pm ¼X1r¼1
j! mrlrAB
!2r � !
2 þ j 2�r!r!
ð19Þ
are complex valued.The closed-form solution of the complex voltage
amplitude Vk can be obtained from Equation (18),which can be used in Equation (15) to obtain the steadystate voltage response expressions across the electrodes
of the individual piezoceramic layers. Then, the complexvoltage amplitude across the resistive load is:
V ¼X3k¼1
Vk: ð20Þ
The complex amplitude of the electric current passingthrough the resistive load is I¼V/Rl and the peakelectrical power amplitude is P¼ |V|2/Rl. Note that V isthe peak voltage amplitude and the root mean squarevalue of the voltage is simply Vrms ¼ V=
ffiffiffi2p
, which yieldsan average power of Pave¼P/2.
In order to obtain the coupled vibration response ofthe harvester, one should use V1, V2, and V3 in Hr
(Equation (16)), which can then be used in Equation(15), and eventually in Equation (4) to obtain thecoupled physical response of the harvester.
CASE STUDY
In this section, an L-shaped unimorph energy harvesterunder harmonic base excitation is analyzed. Ratherthan specifying a certain frequency for the base excita-tion, the coupled response characteristics of the harvesterstructure (mechanical and electrical) are investigatedwith frequency response functions (FRFs). The material,geometric, and electromechanical properties of theharvester are given in Tables 1 and 2. The substructureis made of steel and the material of the piezoceramic layeris PZT-5A. In addition to the numerical data providedin the tables, the structure has two lumped massesM1¼ 0.025 kg and M1¼ 0.015 kg at x1¼L1 and x2¼L2,respectively, and these masses have the rotary inertiasJ1¼ 1.5� 10�6 kg/m2 and J2¼ 1� 10�6 kg/m2, respec-tively. Although the following is a linear analysis basedon the model derived in the previous section, theunimorph harvester of this case study is designed tohave !2ffi 2!1 where !sc
1 ffi 22:8 Hz and !sc2 ffi 45:7 Hz
under short circuit conditions (i.e., Rl ! 0).2 It isobserved that the first two open circuit natural frequen-cies of the harvester are !oc
1 ffi 23:8 and !oc2 ffi 46:5 Hz,
respectively, for Rl !1. The shift in the naturalfrequencies with changing load resistance is an expectedtrend, as previously observed for conventional piezo-electric energy harvesters (Erturk and Inman, 2008a, c).Thus, for finite (and nonzero) values of load resistance,the resonance frequencies of the harvester take valuesbetween the short circuit and open circuit resonancefrequencies. It is observed from the literature that theresonance frequency of a vibration mode has a valuebetween these two frequencies for more complicated
2In order to design the structure with this internal resonance condition in a simple way, a 6-DOF model of the structure (with three translational and three rotationalDOFs) is obtained (Chopra, 2007), and then it is reduced to a 2-DOF model by using the static condensation technique (Guyan, 1965).
536 A. ERTURK ET AL.

energy harvesting circuits as well (see, for instance,Lesieutre et al., 2004). This is reasonable since theimpedance across the electrodes is limited between thesetwo extreme cases (short circuit and open circuitconditions).Before discussing the trends in the resulting FRFs, an
important issue regarding the mode shape dependence ofthe electrical outputs must be addressed. It can berecalled from Figure 3 that the individual piezoceramiclayers are modeled as current sources in parallel to theirinternal capacitances. Equation (10) shows that thecurrent source ik(t) of segment <k is a function of themodal velocity response d�r(t)/dt and the mode shapedependent parameter kr. In case of excitation around avibration mode (!ffi!r), the summation in Equation (10)reduces to a single dominating term. Then, from theexpression given for kr, the amplitude and phase of the
current source depend on the bending slope difference atthe electrode boundaries in segment <k. To improve thecharge collected in segment <k, one should make thisslope difference as large as possible. Strong cancellationsmay occur when harvesting energy from a certainvibration mode if continuous electrodes cover a regionwhere the curvature (and therefore the bending strain)changes sign for that vibration mode (Erturk and Inman,2008a, b).
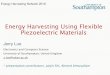
Figure 4(a) and (b) display the piecewise-defined modeshapes of the L-shaped energy harvester for modes 1 and2, respectively. It is clear from Figure 4(a) that the slopedifference in all three segments has the same sign formode 1 excitations. Consequently, the current sourceterms i1(t), i2(t), and i3(t) of segments <1, <2, and <3 inFigure 3 are in-phase and they do not cancel one anotherfor direct combination of the electrode leads in mode 1excitation. However, as can be seen from Figure 4(b), thisis not the case for the second mode shape, since the slopedifference at the electrode boundaries in <1 and that in<2 [ <3 have the opposite sign, which means that i1(t) isnow 1808 out-of-phase when compared to i2(t) and i3(t).As a result, the previously mentioned combination ofthe electrode leads causes cancellation around mode 2excitations. In order to avoid cancellation for excitationsaround mode 2, one should simply connect the leadscoming from <1 in the reverse manner (which corre-sponds to changing the sign of i1(t)). As expected, thismodification that we use in order to avoid cancellationfor excitations around mode 2 results in cancellation forexcitations around mode 1. This discussion is demon-strated in Figure 5(a) and (b), where the voltage andpower FRFs (per base acceleration in g) are plottedagainst a frequency band that includes the first twonatural frequencies (and the FRFs are for a fixed resistiveload Rl¼ 50 k�). The solid line corresponds to the firstcase that is favorable for mode 1 excitation, but results incancellation in mode 2 excitations. The dashed linebelongs to the case where the cancellation in mode 2excitation is avoided, but yields cancellation for mode 1excitation. In practice, it is possible to avoid cancellation
12
10
8
6
6
4
4
2
2
0
0
0 00.01 0.010.02 0.020.03 0.030.04 0.040.05 0.050.06 0.06–2
–2
–4
–6
–8
Mode 1
Mode 2
R1
R1
R2
R2
R3
R3
xk(m) xk(m)
Tra
nsve
rse
defle
ctio
n
Tra
nsve
rse
defle
ctio
n
(a) (b)
Figure 4. Mode shapes of the L-shaped piezoelectric energy harvester for the (a) first mode and for (b) the second mode.
Table 2. Geometric properties of the L-shaped unimorphenergy harvester.
Segment Dimension Substructure Piezoceramic
<1 Length (mm) 50 50Width (mm) 10 10Thickness (mm) 0.5 0.5
<2 Length (mm) 39.6 39.6Width (mm) 8 8Thickness (mm) 0.3 0.3
<3 Length (mm) 20.4 20.4Width (mm) 8 8Thickness (mm) 0.3 0.3
Table 1. Material and electromechanical propertiesof the L-shaped unimorph energy harvester.
Property Substructure Piezoceramic
Young’s modulus (GPa) 200 66Mass density (kg/m3) 7800 7800Piezoelectric constant,
d31 (pm/V)– �190
Permittivity, "S33 (nF/m) – 13.27
L-shaped Piezoelectric Energy Harvester 537

of the electrical outputs of <1, <2, and <3 for bothvibration modes by employing full-wave rectifiers(Erturk et al., 2008b). It is important to note that thecancellation phenomenon is mainly an electrical issuethat depends on the electrode locations, and the majortrend in the mechanical FRF is not affected that much.This is depicted in Figure 5(c), which is the FRFthat gives the transverse displacement at the free endper base acceleration (in g) for the same resistive load(Rl¼ 50 k�). The current FRF can also be obtained fromthe voltage FRF and it is not shown here. Figure 5(d)shows the variation of the voltage, current andpower amplitudes (per base acceleration) for excitationat the short circuit resonance frequency of the firstmode (!sc
1 ffi 22:8 Hz). The voltage output increasesmonotonically whereas the current output decreasesmonotonically with increasing load resistance. As aconsequence of these expected trends in voltage andcurrent, power has a peak value for an optimumresistive load. The largest current output is obtained inshort circuit conditions (Rl ! 0) as 93 mAmps/g, and thelargest voltage output is obtained in open circuitconditions (Rl !1) as 203V/g. An optimum poweroutput of 10mW/g2 is extracted for a resistive load of2.18M�. Note that, similar graphs can be obtained forthe second mode excitation (at !sc
2 ¼ 45:7 rad=s) and theoptimum load resistance for the excitation at this
frequency can be identified. Moreover, a similar analysiscan be performed for the open circuit resonancefrequencies of the harvester as well.
AN APPLICATION: L-SHAPED ENERGY
HARVESTER AS A UAV LANDING GEAR
In this section, first the literature on energy harvestingfor UAV applications is reviewed. After discussing arecent work on piezoelectric energy harvesting fromlanding gears of a UAV (that used uniform cantilever andcurved piezoelectric beams), the L-shaped piezoelectricenergy harvester configuration is proposed as an impro-ved UAV landing gear. Performance of the L-shapedenergy harvester as a UAV landing gear is comparedfavorably with that of a curved energy harvester beamused for the same purpose in a recent study.
Energy Harvesting for UAVs
UAVs have been investigated by several researchers inthe literature (for example Gallington et al., 1996).Moreover, in the last decade, a new class of UAVs, the so-called micro air vehicles (MAVs), has emerged and severalresearch programs were initiated, in particular for use inmilitary-based missions. The main difference between
Cancelation in mode 2
Cancelation in mode 2
Cancelation in mode 1
Cancelation in mode 1
Cancelation in mode 2Cancelation in mode 1
Voltage (V/g)
Current (μ Amp/g)
Power (μ W/g2)
V (
V/g
)W
3 (L
3) (
m/g
)
P (
mW
/g2
)
101
104
104 106 108
102
100
100
100
10–1
10–2
10–2
10–2
10–3
10–4
10–6
10–3
10–4
10–5
0 0
0
20 20
20
40 40
40
60 6080 80100 100
60 80 100
ω (Hz)
ω (Hz) Rl (Ω)
ω (Hz)
(a) (b)
(c) (d)
Figure 5. (a) Voltage, (b) power and (c) tip displacement FRFs for 50 k� load resistance, and (d) variation of the voltage, current and poweramplitudes with load resistance for the short circuit resonance frequency excitation (at 22.8 Hz).
538 A. ERTURK ET AL.

UAVs and MAVs is due to their dimensional definitions.Although wing spans of typical UAVs can exceed 1m,the definition of MAVs limits their maximum lengthdimension to 6 in. (Pines and Bohorquez, 2006).From the practical point of view, our brief discussionin this section applies both for UAVs and MAVs,although, for convenience, we will stick to the termUAV throughout this section. The motivating reasonsfor harvesting energy in a UAV application includeincreasing the flight time for a prescribed mission andpowering the UAV’s sensors or global positioningsystem units.The literature includes research on powering UAVs
with thermoelectric energy generation (Fleming et al.,2002) as well as detailed discussions on the implementa-tion of solar, wind, electromagnetic, and autophagous(self-consuming) structure-battery applications forUAVs (Qidawi et al., 2005). Piezoelectric energy harvest-ing for UAVs was discussed by Erturk et al. (2007) andAnton et al. (2008) where AFC (active fiber composite)beams were located inside the fuselage (in the cantilev-ered configuration) and also attached on the wing spars(as structural patches) of a UAV with a wing span of1.8m for voltage generation during the flight. Recently,Magoteaux (2007) studied solar and piezoelectric energyharvesting techniques for implemention in a small UAV.For integrating piezoelectric beams to a UAV,Magoteaux (2007) proposed to replace the landinggears by cantilevered uniform and curved beams as twopossible configurations. Even though uniform andcurved cantilevered beams are easy to find commercially,these conventional configurations may not be the mostappropriate ones to use as landing gears.Having described the L-shaped piezoelectric energy
harvester and its features in this work, we suggest usingit as a landing gear for UAV applications where perchingis an option for recharging the system. In additionto geometric compatibility of the L-shaped structure asa landing gear (Figure 6), its parameters can be tuned toobtain the two-to-one internal resonance to a prescribedprimary resonance, as discussed previously. Reasonably,one should be careful with the size and weight limitationsof the UAV while designing the L-shaped energyharvester. The primary resonance of interest is thedominant excitation frequency and it might bethe operating frequency of a vibrating base on whichthe UAV lands during a mission, as depicted in Figure 6.As a concrete example, one can consider anMAV, whichlands on a vibrating air conditioner unit during themission to charge its batteries. Typical frequencycontents of such devices have been provided in theliterature on energy harvesting (Roundy et al., 2003);hence, one can select a dominant primary resonance toobtain the best electrical results in piezoelectric energyharvesting. Considering Figure 6, it is worthwhile toadd that the L-shaped energy harvester as a landing gear
has somewhat different boundary conditions andmechanical forcing when compared to what has beeninvestigated in this work based on Figure 2(a). One caneasily modify the boundary conditions given byEquations (3a)–(3h), as well as the mechanical forcingterm, to represent the excitation coming from the wheels.Note that the wheel of each landing gear can take theplace of the second lumped mass between segments <2
and <3. Alternatively, the given formulation can be useddirectly by equating the length of <3 to zero and thepartial lumped mass of the UAV to M2 (Figure 2(a)).Then, the clamped end is the location of the wheel withthe ground acceleration aB(t). The mass of the UAV canbe split and lumped on each landing gear to analyze theelectrical outputs for a given vibratory motion at eachwheel. This option is also in agreement with the approachused in the aforementioned work (Magoteaux, 2007).Therefore, the following analysis considers the split-massof the UAV as M2 and the base acceleration as thevertical acceleration at the wheel.
A Comparative Case Study
As mentioned before, Magoteaux (2007) studied twotypes of harvesters in his landing gear application for asmall UAV: a curved beam and a uniform cantileveredbeam. The total mass of the UAV (150 g) was split intotwo or three lumped masses (for two or three landinggears, respectively) to estimate the electrical poweroutputs of the curved and the uniform harvester beamalternatives. Hence, one case was for 75 g tip mass perlanding gear whereas the other case was for 50 g tip massper landing gear (theoretically, the case of 25 g tip massper landing gear was studied as well, which shouldcorrespond to the case of having six beams, and whichmay not be as practical). Relying on the mathematicalmodel (due to its predictions for the case without theUAV mass), Magoteaux (2007) examined the uniformbeam case theoretically, whereas he investigated thecurved beam case with the UAV mass experimentally.After comparing the model predictions for the uniformbeam case with the experimental results of the curvedbeam case, Magoteaux (2007) concluded that theuniform cantilevered beam case yields higher outputsat relatively low frequencies. This statement could bemisleading, as the displacement response of theharvester was not checked in the theoretical study.For the uniform cantilevered beam case, a tip mass of
(a) (b)
Vibrating base L-shaped landinggear withpiezoceramics
Figure 6. Schematic of a UAV with L-shaped – energy harvester –landing gears; (a) front view of the UAV and (b) side view of the frontlanding gear.
L-shaped Piezoelectric Energy Harvester 539

50 g (due to 1/3 of the UAV mass) is about 137 times themass of each harvester beam (i.e., each landing gear),whereas a tip mass of 75 g (due to 1/2 of the UAV mass)is about 206 times the mass of each harvester beam.It can be shown by using the analytical solutionfor a cantilevered beam (Erturk and Inman, 2008a)that, even for impractically large mechanical dampingratios, both of these cases result in very large displace-ment response amplitudes at resonance whencompared to the dimensions of the uniform harvesterbeam (Table 4.2 in Magoteaux (2007)) for the givenacceleration input (10m/s2). Therefore, the theoreticalpredictions of the uniform harvester model fail forthe aforementioned numerical values (most likely, inpractice, a real harvester described by these numericaldata would also fail under large deflections). Hence, foran approximate comparison, we consider the experi-mental results of the curved beam configuration inMagoteaux (2007) and focus on the case with a 50 g tipmass due to 1/3 of the UAV mass, which is an estimateof using 3 landing gears.The curved harvester beam used by Magoteaux (2007)
was a THUNDER Actuator TH-8R supplied by theFace� International Corporation. The length, width, andtotal thickness of this curved beam are 63.25mm,13.72mm, and 0.43mm. The substrate of the curvedbeam is stainless steel (Face�, 2008). For the case with atip mass of 50 g and an acceleration input of 10m/s2
(realized through a shaker), Magoteaux (2007) obtaineda maximum power output of about 1.1mW with avoltage output of about 7 v. Hence, one can extract theoptimum resistive load that yields the maximum poweroutput approximately as 44 k�. Next, an L-shaped –energy harvester – landing gear is designed as an alter-native to the curved beam used in the mentioned work.For accurate modeling of the L-shaped energy
harvester as a landing gear, one can modify the boundaryconditions of the structure (Figure 2(a)) describedpreviously. However, it is also possible to model thelanding gear structure without changing the formulationgiven in this article and this is what we prefer here. If thelength of the harvester segment <3 equals zero (L3¼ 0) inFigure 2(a), the harvester structure consists of segments<1 and <2 only. One can then consider the lumped massM2 as the split mass of the UAV on each landing gear(M2¼ 50 g). As mentioned in the distributed parameterformulation, the split weight M2 g of the UAV acts as anaxial load for segment <2. Furthermore, a rotary inertia(J2) can be specified for the UAV about the respectiveaxis at the point of connection between the UAV andthe landing gear. As can be anticipated, the clampedend in <1 is the location of the wheel where the groundacceleration input is known (AB¼ 10m/s2). Since theacceleration input at the wheel is known, the mass of the
wheel is redundant. It is important to note that the givenformulation restricts the slope at the wheel to be zero.3 Inaddition to the UAV mass described by M2, theformulation allows another mass at the corner of theharvester (M1 with the rotary inertia J1). Here,M1 mightbe a useful parameter in order to tune the naturalfrequencies of the landing gear, or, practically, it mightrepresent the mass of a stiffener at the corner (forsimplicity, it can be taken as zero).
Here, the attention is given to keeping the total lengthof the L-shaped energy harvester, its thickness, and widthsimilar to those of the curved harvester used byMagoteaux (2007). The geometric data of the L-shaped– energy harvester – landing gear is displayed in Table 3and itsmaterial properties are given in Table 1.Hence, thematerials of piezoceramic and substructure are PZT-5Aand stainless steel, respectively. In addition, M2¼ 50 g,M1¼ J1¼ J2¼ 0 and the harvester consists of segmentsM1 and M2 only, since L3¼ 0. For a more accurateanalysis, the rotary inertia J2 of the UAV can be includedin the calculations. Note that, with these data, theL-shaped structure has a total mass of 1.95 g (excludingthe wheel and the UAV mass) and it is slightly less thanthe mass of the THUNDER Actuator TH-8R used byMagoteaux (2007), which is 2.1 g (Face�, 2008). Thus, thecomparison basis is fair in terms of the amount of themass added to the UAV as a landing gear. Instead ofpresenting the electrical outputs at resonance as done byMagoteaux (2007), we present the results with FRFs asdone in the case study. For a resistive load of Rl¼ 44 k�(which is approximately the optimum resistive load of theconfiguration in Magoteaux (2007)), the voltage FRF(per g) is shown in Figure 7(a). Note that Rl¼ 44 k�,however, is not the optimum resistive load of theharvester presented here. The issue regarding the combi-nation of the electrode leads of segments <1 and <2
generators persists (see the discussion in the case study)and one can combine these leads to avoid cancellationsformode 1 ormode 2 excitations, separately. The first tworesonance frequencies of the harvester in short circuitconditions (Rl ! 0) are 16.4Hz and 49.3Hz, respec-tively. These two frequencies, respectively, shift to theopen circuit resonance frequencies 17.0Hz and 49.7Hz,
3Although base rotation is not discussed in this work, one might as well specify a small rotation at the base, as described by Erturk and Inman (2008a) for the unimorphcantilevered energy harvester case. Inclusion of base rotation results in a modification of the modal forcing function given by Equation (9b).
Table 3. Geometric properties of the L-shaped – energyharvester – landing gear.
Segment Dimension Substructure Piezoceramic
<1 Length (mm) 30 30Width (mm) 10 10Thickness (mm) 0.3 0.3
<2 Length (mm) 20 20Width (mm) 10 10Thickness (mm) 0.2 0.2
540 A. ERTURK ET AL.

as Rl !1. It can be seen from the voltage FRFfor Rl¼ 44k� that the maximum voltage amplitudecan be as high as 14.8V/g, and 11.3V/g for mode 1 andmode 2 excitations, respectively. The electrical powerFRF is shown in Figure 7(b) for the same resistive load,and the maximum power for mode 1 and mode 2excitations can be read from the graph as 4.90mW/g2
and 2.92mW/g2, respectively. The transverse deflectionamplitudes at the critical points (x1¼L1 and x2¼L2)are found to be53mm/g and 4mm/g, respectively, for4% modal mechanical damping. Figure 7(c) and (d)display the variation of voltage, current and poweramplitudes with load resistance for mode 1 and mode 2excitations, at !sc
1 ¼ 16:4 Hz and at !sc2 ¼ 49:3 Hz,
respectively. In Figure 7(c), the leads of the electrodescoming from segments <1 and <2 are combined to avoidcancellation for mode 1 excitation, whereas, in Figure7(d), the leads are combined to avoid cancellation formode 2 excitation. The maximum voltage and currentamplitudes in Figure 7(c) are 281.8V/g (for open circuitconditions, Rl!1) and 316 mAmps/g (for short circuitconditions, Rl ! 0), respectively. The maximum poweramplitude in Figure 7(c) is about 31.9mW/g2 for anoptimum resistive load of 870 k�. One can read themaximum voltage and current amplitudes in Figure 7(d)as 100V/g (for open circuit conditions) and 251 mAmps/g(for short circuit conditions), respectively. The maximumpower amplitude in Figure 7(d) is about 15.5mW/g2 foran optimum resistive load of 398 k�.
It is clear from Figure 7(c) and (d) that the optimumload resistance of the L-shaped energy harvester isrelatively large (in the order of hundreds of k�) and themaximum power obtained for the optimum resistiveload is also much larger when compared to the curvedharvester beam case. Magoteaux (2007) was able toextract 1.1mW from the curved harvester (THUNDERActuator TH-8R) for a harmonic ground accelerationwith amplitude of 10m/s2 (slightly higher than 1 g)and at a resonance frequency of 145Hz (for theoptimum resistive load of 44 k�). Here, for the sameresistive load (44 k�) and 1 g acceleration input, theL-shaped – energy harvester – landing gear gives 4.9mWat 16.4Hz and 2.92mW at 49.3Hz (Figure 7(b)).Although 44 k� is not the optimum resistive load forthe L-shaped energy harvester used here, the poweroutputs obtained at these two resonance frequencies arestill larger than the maximum power (1.1mW) obtainedfrom the curved harvester used by Magoteaux (2007).Since the optimum load resistance of the L-shapedconfiguration is relatively large, the electrical powerincreases monotonically as one increases the resistiveload from low values to a certain value in the order ofhundreds of k� (Figure 7(c) and (d) for mode 1 andmode 2 excitations, respectively). Based on thesepromising results of the model proposed, the authorsare currently investigating the experimental performanceof the L-shaped beam-mass structure as a piezoelectricenergy harvester.
Cancelation in mode 2Cancelation in mode 1
Cancelation in mode 2
Cancelation in mode 1
Voltage (V/g)Voltage (V/g)
Current (μ Amp/g)Current (μ Amp/g)
Power (m W/g2)Power (m W/g2)
V (
V/g
)W
3 (L
3) (
m/g
)
P (
mW
/g2
)
102
101
101
104 106105103 108107
102
100
100
100
10–1
10–2
10–2
102
10–3
10–4
10–6
101
100
10–1
103 104 105 106 107 108
0 020 2040 4060 6080 80100 100
ω (Hz)
Rl (Ω)Rl (Ω)
ω (Hz)
(a) (b)
(c) (d)
15.5 mWatts/g231.9 m Watts/g2
14.8 V/g 11.3 V/g4.90 m W/g2
2.92 m W/g2
Figure 7. (a) Voltage and (b) power FRFs for a 44 k� load resistance and variation of the voltage, current, and power amplitudes with loadresistance for the short circuit resonance frequency excitation of the (c) first mode (at 16.4 Hz) and the (d) second mode (at 49.3 Hz).
L-shaped Piezoelectric Energy Harvester 541

SUMMARY AND CONCLUSIONS
In this work, an L-shaped beam-mass structure isproposed as a novel piezoelectric energy harvesterconfiguration with the capability of producing a broaderband harvesting system. A distributed parameter modelis proposed to analyze the coupled electromechanicalbehavior of the L-shaped piezoelectric energy harve-ster and a direct application is proposed for UAVs.The L-shaped structure can be tuned to have thefirst two natural frequencies much closer to each other(on the frequency axis) when compared to the conven-tional cantilevered beam case. Reasonably, having thefirst two natural frequencies close to each other is afavorable feature in the sense of broadband energyharvesting for random or varying-frequency excitations.An electromechanical model is presented for a
detailed analysis, where the L-shaped piezoelectricenergy harvester is investigated as a generator withthree thin beam segments. The coupled model isdeveloped based on a recent distributed parameterpiezoelectric energy harvester formulation. The electricaloutputs of the three piezoceramic segments are com-bined in series and connected to a resistive electricalload. The frequency response functions of the voltageacross the resistive load, and electrical power as well asthe coupled mechanical response of the harvester areinvestigated (per base acceleration). Variations of thevoltage, current, and power amplitudes with loadresistance are also examined and the well-knownqualitative trends are observed (such as the existenceof an optimum resistive load for the maximum electricalpower and the short circuit and open circuit resonancefrequencies). In addition, how to combine the electrodesof the piezoelectric layers is discussed to avoid thepossible mode shape dependent voltage cancellations.Finally, a direct application is discussed where the
L-shaped energy harvesters are suggested for use as UAVlanding gears. Improving the flight time of UAVs duringthe mission and powering their sensors and globalpositioning units is an important research topic. Here,the L-shaped energy harvester configuration is proposedas a UAV landing gear for harvesting electrical energyfrom perching during the mission. A case study ispresented to compare the L-shaped – energy harvester –landing gear with a curved energy harvester beam thatwas used for the same purpose in a recent work. Thesignificant advantage of using the L-shaped energyharvester (having the same mass and resistive load asthat of the curved beam harvester) is demonstratedtheoretically. Based on the promising theoretical resultsof this novel piezoelectric energy harvester configuration,the authors are currently investigating the experimentalperformance of the L-shaped beam-mass structure forpiezoelectric energy harvesting.
APPENDIX
Mass per unit length of segment <k can be given by:
mk ¼ bk ð sÞkðhsÞk þ ð pÞkðhpÞk� �
, ð21Þ
where ( s)k and ( p)k are mass densities of the sub-structure and piezoceramic layers, respectively. Thethicknesses are given by (hs)k and (hp)k for the sub-structure and the piezoceramic layers, respectively, andboth layers are assumed to have the same width bk insegment <k (Figure 8).
The bending stiffness of the composite cross-sectioncan be expressed as:
YIk ¼bk3ðYsÞk ðhbÞ
3k � ðhaÞ
3k
� �þ ðYpÞk ðhcÞ
3k � ðhbÞ
3k
� �� �,
ð22Þ
where (Ys)k and (Yp)k are the Young’s moduli of thesubstructure and the piezoceramic layers, respectively.Note that (Yp)k is indeed the elastic stiffness ofthe piezoceramic at constant electric field, i.e.,ðYpÞk ¼ cE11
� �k. Furthermore, (ha)k is the position of the
bottom of the substructure layer from the neutral axis(always negative), (hb)k is the position of the top of thesubstructure layer from the neutral axis (positive ornegative), and (hc)k is the position of the top of thepiezoceramic layer from the neutral axis (alwayspositive):
ðhaÞk ¼ �ðhpÞ
2k þ 2ðhpÞkðhsÞk þ nkðhsÞ
2k
2 ðhpÞk þ nkðhsÞk� � ,
ðhbÞk ¼nkðhsÞ
2k � ðhpÞ
2k
2 ðhpÞk þ nkðhsÞk� � ,
ðhcÞk ¼ðhpÞ
2k þ 2nkðhpÞkðhsÞk þ nkðhsÞ
2k
2 ðhpÞk þ nkðhsÞk� � ,
ð23Þ
where nk¼ (Ys)k/(Yp)k is the Young’s moduli ratio.
Piezoceramic
Electrodes
Substructure
Neutral axis
(hp)k
(hs )k
(hpc )k
yk
bk
zk
Figure 8. Cross-sectional view of the k-th unimorph segment.
542 A. ERTURK ET AL.

The distance from the center of the piezoceramic layerto the neutral axis in segment <k can be expressed as:
ðhpcÞk ¼nkðhsÞk ðhpÞk þ ðhsÞk
� �2 ðhpÞk þ nkðhsÞk� � : ð24Þ
Finally, the electromechanical coupling coefficient inthe physical coordinates for segment <k of the structurecan be given by:
#k ¼ðYpÞkðd31Þkbk
2ðhpÞkðhbÞ
2k � ðhcÞ
2k
� �, ð25Þ
where (d31)k is the piezoelectric constant of the piezo-ceramic layer in <k.
ACKNOWLEDGMENTS
The authors gratefully acknowledge the support of theAir Force Office of Scientific Research (AFOSR) MURIunder grant number F 9550-06-1-0326 ‘EnergyHarvesting and Storage Systems for Future Air ForceVehicles’ monitored by Dr B.L. Lee. The authors alsothank Dr Brian Sanders of the Air Force ResearchLaboratory (AFRL) for helpful discussions on the UAVlanding gear concept.
REFERENCES
Anton, S.R. and Sodano, H.A. 2007. ‘‘A Review of Power Harvestingusing Piezoelectric Materials (2003)–(2006),’’ Smart Materialsand Structures, 16:R1–R21.
Anton, S.R., Erturk, A. and Inman, D.J. 2008. ‘‘Energy Harvestingfrom Small Unmanned Air Vehicles,’’ In: Proceedings of the 17thInternational Symposium on Application of Ferroelectrics, 3rdAnnual Energy Harvesting Workshop, 24–27 February 2007,Santa Fe, NM.
Arnold, D.P. 2007. ‘‘Review of Microscale Magnetic PowerGeneration,’’ IEEE Transactions on Magnetics, 43:3940–3951.
Baker, J.M., Roundy, S. and Wright, P.K. 2005. ‘‘AlternativeGeometries for Increasing Power Density in Vibration EnergyScavenging for Wireless Sensor Networks,’’ In: Proceedings of3rd International Energy Conversion Engineering Conference,15–18 August 2005, San Francisco, CA.
Balachandran, B. and Nayfeh, A.H. 1990. ‘‘Nonlinear Motionsof Beam-mass Structure,’’ Nonlinear Dynamics, 1:39–61.
Beeby, S.P., Tudor, M.J. and White, N.M. 2006. ‘‘Energy HarvestingVibration Sources for Microsystems Applications,’’MeasurementScience and Technology, 17:175–195.
Chopra, A. 2007. Dynamics of Structures: Theory and Applicationsto Earthquake Engineering, Prentice Hall, New Jersey.
Cook-Chennault, K.A., Thambi, N. and Sastry, A.M. 2008.‘‘Powering MEMS Portable Devices – A Review of Non-regenerative and Regenerative Power Supply Systems withEmphasis on Piezoelectric Energy Harvesting Systems,’’ SmartMaterials and Structures, 17:043001:1–33.
duToit, N.E., Wardle, B.L. and Kim, S.G. 2005. ‘‘DesignConsiderations for MEMS-scale Piezoelectric MechanicalVibration Energy Harvesters,’’ Journal of IntegratedFerroelectrics, 71:121–160.
Erturk, A., Anton, S.R. and Inman, D.J. 2007. ‘‘Energy Harvestingfrom Rigid Body Motions,’’ In: Proceedings of the 18thInternational Conference of Adaptive Structures andTechnologies, 3–5 October 2007, Ottawa, Ontario, Canada.
Erturk, A. and Inman, D.J. 2008a. ‘‘A Distributed ParameterElectromechanical Model for Cantilevered Piezoelectric EnergyHarvesters,’’ ASME Journal of Vibration and Acoustics,130:041002:1–15.
Erturk, A., Tarazaga, P.A., Farmer, J.R. and Inman, D.J. 2008b.‘‘Effect of Strain Nodes and Electrode Configurationon Piezoelectric Energy Harvesting from Cantilevered Beams,’’ASME Journal of Vibration and Acoustics, 10.1115/1.2981094.
Erturk, A. and Inman, D.J. 2008c. ‘‘An ExperimentallyValidated Bimorph Cantilever Model for Piezoelectric EnergyHarvesting from Base Excitations,’’ Smart Materials andStructures (in review).
Erturk, A. and Inman, D.J. 2008d. ‘‘On Mechanical Modelingof Cantilevered Piezoelectric Vibration Energy Harvesters,’’Journal of Intelligent Material Systems and Structures, 19,10.1177/1045389X07085639 (in press).
Face� 2008. TH-8R data sheet. URL http://www.faceco.com
Fleming, J., Ng, W. and Ghamaty, S. 2002. ‘‘Thermoelectric-basedPower System for UAV/MAV Applications,’’ Proceedings of 1stTechnical Conference and Workshop in Unmanned AerospaceVehicles, 20–23 May 2002, Portsmouth, VA.
Gallington, R.W., Merman, H., Entzminger, J., Francis, M.S.,Palmore, P. and Stratakes, J. 1996. ‘‘UnmannedAerial Vehicles,’’ Future Aeronautical and Space Systems,AIAA, 172:251–296.
Guyan, R. 1965. ‘‘Reduction of Stiffness and Mass Matrices,’’ AIAAJournal, 3:380.
Haddow, A.G., Barr, A.D.S. and Mook, D.T. 1984. ‘‘Theoreticaland Experimental Study of Modal Interaction in a Two-degree-of-freedom Structure,’’ Journal of Sound and Vibration,97:451–473.
Hu, Y., Xue, H. and Hu, H. 2007. ‘‘A Piezoelectric Power Harvesterwith Adjustable Frequency through Axial Preloads,’’ SmartMaterials and Structures, 16:1961–1966.
Lesieutre, G.A., Ottman, G.K. and Hofmann, H.F. 2004. ‘‘Dampingas a Result of Piezoelectric Energy Harvesting,’’ Journal of Soundand Vibration, 269:991–1001.
Magoteaux, K. 2007. Investigation of an Energy HarvestingSmall Unmanned Air Vehicle. Master of Science Thesis,University of Dayton.
Mitcheson, P.D., Miao, P., Start, B.H., Yeatman, E.M., Holmes, A.S.and Green, T.C. 2004. ‘‘MEMS Electrostatic Micro-PowerGenerator for Low Frequency Operation,’’ Sensors andActuators A, 115:523–529.
Nayfeh, A.H. and Mook, D.T. 1979. Nonlinear Oscillations, Wiley,New York.
Ottman, G.K., Hofmann, H.F., Bhatt, A.C. and Lesieutre, G.A. 2002.‘‘Adaptive Piezoelectric Energy Harvesting Circuit for WirelessRemote Power Supply,’’ IEEE Transactions on PowerElectronics, 17:669–676.
Oueini, S.S., Nayfeh, A.H. and Pratt, J.R. 1998. ‘‘A NonlinearVibration Absorber for Flexible Structures,’’ NonlinearDynamics, 15:259–282.
Pines, D.J. and Bohorquez, F. 2006. ‘‘Challenges Facing FutureMicro-air-vehicle Development,’’ AIAA Journal of Aircraft,43:290–305.
Priya, S. 2007. ‘‘Advances in Energy Harvesting using LowProfile Piezoelectric Transducers,’’ Journal of Electroceramics,19:167–184.
Qidawi, M.A., Thomas, J.P. and Kellogg, J.C. 2005. ‘‘ExpandingMission Capabilities of Unmanned Systems through the
L-shaped Piezoelectric Energy Harvester 543

Collection of Energy in the Field,’’ In: Proceedings of the AIAA3rd International Energy Conversion Engineering Conference,15–18 August 2008, San Francisco, CA.
Rao, S.S. 2007. Vibration of Continuous Systems, Wiley, New York.
Roundy, S.,Wright, P.K. and Rabaey, J. 2003. ‘‘A Study of Low LevelVibrations as a Power Source for Wireless Sensor Nodes,’’Computer Communications, 26:1131–1144.
Sodano, H.A., Park, G. and Inman, D.J. 2004. ‘‘Estimation of ElectricCharge Output for Piezoelectric Energy Harvesting.’’ Strain, 40:49–58.
Sodano, H.A., Inman, D.J. and Park, G. 2005. ‘‘Generation andStorage of Electricity from Power Harvesting Devices,’’ Journalof Intelligent Material Systems and Structures, 16:67–75.
Williams, C.B. and Yates, R.B. 1996. ‘‘Analysis of a Micro-electricGenerator for Microsystems,’’ Sensors and Actuators A, 52:8–11.
544 A. ERTURK ET AL.