Embed Size (px)
Citation preview

Modeling Hydraulic TransientsUsing
Dynamic System Simulation Software
Clifton Labs, Ltd.
January 9, 2012

Contents
1 Introduction 1
2 Terminology 1
2.1 Nomenclature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
2.2 Terms used to Describe Pressure and Head . . . . . . . . . . . . . . . 3
2.3 Physical Pressures . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.4 Potential Energy Densities . . . . . . . . . . . . . . . . . . . . . . . . 4
3 Derivation of Hydraulic Transient Equations 5
3.1 Derivatives Along a Path . . . . . . . . . . . . . . . . . . . . . . . . . 5
3.2 Basic Variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3.3 Continuity of Mass . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3.4 Fluid Momentum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.5 Continuity and Momentum Equations Along a Fluid Particle Path . . 8
3.6 Relationship Between Linear Mass Density and Pressure . . . . . . . 9
4 Solution by Method of Characteristics 9
5 Library of Standard Program Blocks 12
5.1 Program Block Conventions . . . . . . . . . . . . . . . . . . . . . . . 12
5.2 W-0: Elementary Pipe Section . . . . . . . . . . . . . . . . . . . . . . 13
5.3 Junctions Between Dissimilar Pipe Sections . . . . . . . . . . . . . . 14
5.3.1 Loss coe¢ cients between dissimilar pipe sections . . . . . . . . 14
i

5.3.2 J-1: Junction with loss coe¢ cients de�ned by downstream ve-locity head . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
5.3.3 J-2: Junction with loss coe¢ cients de�ned by upstream velocityhead . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
5.3.4 E-1: Pipe entrance . . . . . . . . . . . . . . . . . . . . . . . . 17
5.3.5 D-1: Pipe discharge . . . . . . . . . . . . . . . . . . . . . . . . 18
5.4 Junctions Between Similar Pipe Sections . . . . . . . . . . . . . . . . 19
5.4.1 L-1: Loss junction between similar pipe sections . . . . . . . . 19
5.4.2 W-1: Pipe section with friction loss . . . . . . . . . . . . . . . 20
5.4.3 V-1: In-line valve with variable loss coe¢ cient . . . . . . . . . 21
5.4.4 V-2: In-line valve with variable �ow coe¢ cient . . . . . . . . . 22
5.5 B-1: Bifurcation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
6 Area Modulus Formulas 26
7 References 28
ii

1 Introduction
In this report we derive the continuity and momentum equations applicable to one-dimensional �uid transients in uniform pipe sections without friction loss. We thenshow how the method of characteristics provides a general solution to the continuityand momentum equations in the form of two waves traveling in opposite directions.Finally we present a library of standard program blocks which can be combined toform a complete �uid transient simulation program. This library contains programblocks which model
1. elementary pipe sections each having uniform diameter, uniform wall sti¤ness,and no losses, and
2. junctions between elementary pipe sections.
Traveling in opposite directions within an elementary pipe section, the two waves areeach modeled by an ideal delay element having a delay time equal to the wave traveltime through the elementary pipe section. The initial wave magnitudes entering eachend of an elementary pipe segment (i.e. boundary conditions) are determined by thejunctions between the elementary pipe sections.
The junctions between elementary pipe sections include hydraulic head losses propor-tional to the square of the �uid velocity. Pipes with losses are modeled by a sequenceof elementary sections connected by junctions having appropriate loss coe¢ cientsto account for the pipe hydraulic head losses. Loss junctions can also be added toaccount for form losses such as pipe bends. Valves and turbines are modeled by junc-tions with variable loss coe¢ cients. The reservoir and discharge ponds are modeledas limiting cases of junctions between an ordinary elementary pipe section and anin�nite diameter elementary section in which the �uid velocity is zero.
2 Terminology
2.1 Nomenclature
The nomenclature used in this report is given in Table 1 (page 2) along with theInternational System (SI) units for each variable.
1

A cross-sectional area of pipe (m2)Ad cross-sectional area of draft tube exit (m2)a wave speed (m= s)CV �ow coe¢ cient (m3= s @ 1m head)D inside diameter of pipe (m)E Young modulus (Pa)e pipe wall thickness (m)Fj H� at downstream (j = 1) or upstream (j = 2) side of component (m)f Darcy-Weisbach friction factor (dimensionless)fj H+ at downstream (j = 1) or upstream (j = 2) side of component (m)G shear modulus (Pa)g gravitational acceleration (m= s2)H head (m)KA pipe area modulus (Pa)K� linear density modulus (Pa)K� �uid density modulus (Pa)k loss coe¢ cient (dimensionless)L pipe section length (m)P shaft power (W)p static pressure (Pa)p0 thermodynamic pressure (Pa)p1 bulk viscous pressure (Pa)pa atmospheric pressure (Pa)Q �uid �ow rate (m3= s)T pipe section travel time ( s)t time ( s)V �uid velocity (m= s)x distance along pipe, positive direction towards plant (m)z elevation (m)z0 intake surface elevation (m)zd discharge surface elevation (m) �uid speci�c weight (N=m3)� turbine e¢ ciency (dimensionless)� linear mass density ( kg=m)� �uid density ( kg=m3)� Poisson�s ratio for pipe wall (dimensionless)
Table 1: Nomenclature for hydraulic transient analysis.
2

2.2 Terms used to Describe Pressure and Head
In hydraulics and �uid mechanics, various kinds of pressure and head are distinguishedby the following adjectives:
1. static,
2. hydrostatic,
3. piezometric,
4. velocity or dynamic, and
5. total.
The �rst two adjectives listed above are particularly confusing since there is a ten-dency to use the terms �static pressure�and �hydrostatic pressure�interchangeably.In hydro engineering it is also common to use the terms �pressure�and �static pres-sure�where traditional �uid mechanics texts use �static pressure�and �hydrostaticpressure.�The other three kinds of pressure (or head) are not physical pressures butare potential energy densities having dimensions of force per unit area (or length). To�x the terminology used in this document we provide below de�nitions of the variousphysical pressures and potential energy densities.
2.3 Physical Pressures
Static pressure p is the sum of the thermodynamic pressure p0 and the bulk viscouspressure p1. The bulk viscous pressure p1 is generally only signi�cant on a cosmologicalscale or in regions where a �uid is undergoing very rapid expansion or contraction.For the cases considered in this document, the static pressure p is essentially equalto the thermodynamic pressure p0.
Hydrostatic pressure is the thermodynamic pressure within a connected �uid systemwhich
1. extends to the upper limits of the atmosphere and
2. is in static equilibrium with the gravitational �eld.
With these de�nitions, hydrostatic pressure applies only to particular �uid systemsat rest with respect to the planet and static pressure is de�ned for all �uids in allstates of motion.
3

2.4 Potential Energy Densities
The potential mechanical energy density (potential mechanical energy per unit volumeof �uid) for an incompressible �uid is
�gz + p+1
2�V 2 (1)
where � is the �uid mass density (mass per unit volume), g is the gravitationalacceleration, z is the elevation, p is the static pressure, and V is the �uid velocity.The total potential energy density is the sum of the gravitational potential energydensity �gz, the static pressure p, and the dynamic pressure �V 2=2. Since we areonly interested in di¤erences in potential energy, the elevation z can be the heightabove any �xed equipotential surface. Likewise the static pressure p can be relativeto any �xed reference pressure. It is common to use elevations relative to mean sealevel and pressures relative to atmospheric pressure.
The �uid speci�c weight or gravitational force per unit volume is
= �g: (2)
The potential mechanical energy per unit weight of �uid or total head is
p+ �gz + 12�V 2
= z +
p
+V 2
2g: (3)
The total head is the sum of the elevation z, the static or pressure head p= , andthe velocity or dynamic head V 2= (2g). The sum of the �rst two terms z + p= isthe piezometric or hydraulic head. When plotting the total head and hydraulic headversus distance along a pipe, the two curves are referred to as the energy grade lineand the hydraulic grade line respectively.
The gross head of a hydro plant is the di¤erence between the intake and dischargesurface elevations z0 � zd. The net head of a turbine is the di¤erence �H betweenthe total head at the turbine inlet and the total head at the turbine discharge. Theturbine e¢ ciency is
� =P
Q�H(4)
where P is the shaft power and Q is the turbine discharge (volume per unit time).By convention, the total head at the discharge of a Francis turbine is de�ned to be
zd + pa +1
2g
�Q
Ad
�2(5)
where zd is the discharge surface elevation, pa is atmospheric pressure, and Ad is thecross-sectional area of the draft tube exit.
4

3 Derivation of Hydraulic Transient Equations
3.1 Derivatives Along a Path
The basic transient equations are more intuitive when written in terms of derivativesalong paths following the �uid �ow. And in the method of characteristics we solvethe transient equations by means of derivatives along paths following the pressurewaves. Here we review the concept of a �derivative along a path�in the simple caseof one-dimensional motion.
Suppose f is a function of position x and time t with continuous partial derivatives,and c is a curve or path determining x as a function of t
x = c (t) (6)
with a continuous derivative c0 (t). Then �along the path c�the function f can beviewed as a function of the single variable t according to
f (t) = f (c (t) ; t) : (7)
The derivative of f along the path c is then
f 0 (t) =@f
@x(c (t) ; t) c0 (t) +
@f
@t(c (t) ; t) : (8)
This can be written more succinctly as
df
dt=@f
@xc0 +
@f
@t(9)
ordf
dt=@f
@x
dx
dt+@f
@t. (10)
Paths along which the rate of change in position c0 is the same as the �uid velocity V
c0 (t) = V (c (t) ; t) (11)
have a special signi�cance in �uid mechanics equations. These paths �go with the�ow�and each such path is the path of a ��uid particle.�The derivative of a functionf along such a path
df
dt=@f
@xV +
@f
@t(12)
is called a total derivative. To emphasize the special role of these derivatives, we usethe notation
Df
Dt=@f
@xV +
@f
@t: (13)
5

3.2 Basic Variables
In practical problems there are typically a number of pipe sections with each sectionhaving uniform cross-sectional area A. More precisely, we assume that the cross-sectional area is constant for the same internal pressure. In developing the equationsdescribing �uid �ow through such a pipe section, the following quantities are consid-ered to be functions of distance x along the pipe and time t:
1. A cross-sectional area of pipe,
2. � �uid density,
3. V �uid velocity (positive for movement in the positive x direction), and
4. p static pressure.
The percent changes in the �uid density � and the cross-sectional area of pipe A arevery small over the range of realistic static pressures p. Nevertheless these very smallpercent changes have a signi�cant e¤ect in the hydraulic transients occurring in longpipes.
We will assume that the four basic functions above are di¤erentiable with respectto x and t. We will also assume that all partial derivatives appearing in this workare continuous so that we can employ the chain and product rules when evaluatingderivatives.
3.3 Continuity of Mass
We de�ne the linear mass density (mass per unit length) to be
� (x; t) = � (x; t)A (x; t) : (14)
The mass m contained in the interval [x1; x2] at time t isZ x2
x1
� (x; t) dx (15)
and the rate of change in mass in the same interval is
d
dt
Z x2
x1
� (x; t) dx =
Z x2
x1
@�
@t(x; t) dx: (16)
6

The mass �ow rate, or rate at which mass is �owing (past a given point x at a giventime t), is the function �V de�ned by
�V (x; t) = � (x; t)V (x; t) : (17)
If mass is neither created nor destroyed, then the rate of change in mass in the interval[x1; x2] is also the di¤erence between the mass �ow rate �V at the two end points
d
dt
Z x2
x1
� (x; t) dx = �V (x; t)jx=x1x=x2= �
Z x2
x1
@�V
@x(x; t) dx: (18)
From Equations 16 and 18, it follows that
0 =
Z x2
x1
@�
@t(x; t) dx+
Z x2
x1
@�V
@x(x; t) dx =
Z x2
x1
@�
@t(x; t) +
@�V
@x(x; t) dx: (19)
But the only way an integral of a function can be zero on every interval [x1; x2] is forthe function to be identically zero for all x. From continuity of mass, we must thenhave
0 =@�
@t(x; t) +
@�V
@x(x; t) : (20)
And, if we keep in mind that a partial derivative of a function of x and t is also afunction of x and t, we can write this more succinctly as
0 =@�
@t+@�V
@x: (21)
3.4 Fluid Momentum
The product �V is also the linear momentum density (linear momentum per unitlength). The linear momentum contained in the interval [x1; x2] at time t isZ x2
x1
�V (x; t) dx (22)
and the rate of change in linear momentum in the same interval is
d
dt
Z x2
x1
�V (x; t) dx =
Z x2
x1
@�V
@t(x; t) dx: (23)
The linear momentum �ow rate, or rate at which linear momentum is �owing (pasta given point x at a given time t), is given by the function �V 2 de�ned by
�V 2 (x; t) = �V (x; t)V (x; t) : (24)
We assume that the only forces acting on the �uid in the x direction are the staticpressure p acting on the cross sectional area A and the the force of gravity due to
7

changes in elevation z of the pipe. The strong form of Newton�s Second Law requiresthat the rate of change in linear momentum within the interval [x1; x2] is the sum ofthe net linear momentum in�ow rate plus the net force. We thus have
d
dt
Z x2
x1
�V (x; t) dx = �V 2 (x; t)��x=x1x=x2
+ Ap(x; t)jx=x1x=x2+ �gz (x)jx=x1x=x2
(25)
= �Z x2
x1
@�V 2
@x(x; t) + A
@p
@x(x; t) + �g
dz
dxdx
where the pipe cross-sectional area A and the linear mass density � in the second andthird terms of the integral are nominal values for the pipe section. From Equations23 and 25, it follows that
0 =
Z x2
x1
@�V
@t(x; t) +
@�V 2
@x(x; t) + A
@p
@x(x; t) + �g
dz
dx(x) dx: (26)
But the only way an integral of a function can be zero on every interval [x1; x2] is forthe function to be identically zero for all x. From the law of momentum, we mustthen have
0 =@�V
@t+@�V 2
@x+ A
@p
@x+ �g
dz
dx: (27)
We will refer to Equations 21 and 27 as the continuity and momentum equationsrespectively.
3.5 Continuity andMomentum Equations Along a Fluid Par-ticle Path
Expanding Equation 21 using the product rule, we obtain the equivalent continuityequation
0 =1
�
D�
Dt+@V
@x: (28)
Expanding Equation 28 using the product rule, we �nd that two terms can be elimi-nated on account of the continuity equation. We are then left with
0 = �DV
Dt+ A
@p
@x+ �g
dz
dx(29)
or equivalently
0 = �DV
Dt+@p
@x+ �g
dz
dx: (30)
8

3.6 Relationship Between Linear Mass Density and Pressure
Within a uniform pipe section, the linear mass density � increases with static pressurep according to
1
�
d�
dp=1
�
d�
dp+1
A
dA
dp=
1
K�
+1
KA
=1
K�
(31)
where
K� =dp
d�=�(32)
is the density (or bulk) modulus of the �uid,
KA =dp
dA=A(33)
is the area modulus of the pipe, and
K� =dp
d�=�=
�1
K�
+1
KA
��1(34)
is the linear mass density modulus. Using Equation 31, we can rewrite Equation 28as
0 =1
�
d�
dp
Dp
Dt+@V
@x=
1
K�
Dp
Dt+@V
@x(35)
or, more simply,
0 =Dp
Dt+K�
@V
@x: (36)
4 Solution by Method of Characteristics
We now consider how to solve for the static pressure p and �uid velocity V in auniform frictionless pipe. We begin by rewriting Equations 36 and 30 in terms ofpartial derivatives to obtain the continuity and momentum equations
0 =@p
@t+ V
@p
@x+K�
@V
@x(37)
and
0 = �@V
@t+ �V
@V
@x+@p
@x+ �g
dz
dx: (38)
In these equations, the unknown static pressure p and �uid velocity V are functionsof the two independent variables, position x and time t. Likewise, the partial deriv-atives of the static pressure p and the �uid velocity V are functions of the same twoindependent variables. In the method of characteristics we seek curves c along whichpartial derivatives, such as those appearing in Equations 37 and 38, are reduced to
9

ordinary derivatives. Such curves are called characteristic curves. In seeking charac-teristic curves for the system of Equations 37 and 38 it is helpful to remember thatany two distinct linear combinations of these two equations of the form
0 =
�@p
@t+ V
@p
@x+K�
@V
@x
�+ �
��@V
@t+ �V
@V
@x+@p
@x+ �g
dz
dx
�(39)
will constitute a system of partial di¤erential equations having the same solutions asthe original Equations 37 and 38. Rewriting the general linear combination above inthe form
0 =
�(V + �)
@p
@x+@p
@t
�+ ��
��V +
K�
��
�@V
@x+@V
@t+ g
dz
dx
�(40)
we see that we can reduce the linear combinations of partial derivatives to ordinaryderivatives along a curve c if
c0 (t) = V + � = V +K�
��: (41)
The two distinct values of � satisfying
V + � = V +K�
��(42)
are
� = �
sK�
�: (43)
Corresponding to these two distinct values of � are two requirements for characteristiccurves
c0 (t) = V �
sK�
�= V � a (44)
where
a =
sK�
�(45)
is called the wave speed for reasons which will become clear shortly. Along these twocharacteristic curves, Equation 40 reduces to two ordinary di¤erential equations
0 =dp
dt� �a
�dV
dt+ g
dz
dx
�: (46)
With these two ordinary di¤erential equations we can begin to see why pressuretransients are a wave phenomenon. For instance, consider the case of a level pipesection where dz=dx = 0. We then have the two ordinary di¤erential equations
0 =dp
dt� �adV
dt=d
dt(p� �aV ) : (47)
10

The two quantities
p+ =p+ �aV
2and p� =
p� �aV2
(48)
are not generally constant along a pipe section. Along a path with velocity V + a,however, p+ is constant since
dp+dt
=1
2
d
dt(p+ �aV ) = 0: (49)
For this reason we say that p+ is a �pressure wave�propagating with velocity V + a.By similar reasoning, p� is a pressure wave propagating with velocity V � a. Thepropagation velocities relative to the �uid are +a and �a: Thus the wave speed a isthe speed at which the pressure waves propagate through the �uid.
Passing through a given point x at a given time t, will be one path with velocity V +aalong which p+ is constant and a second path with velocity V � a along which p� isconstant. It follows that at the given point x at the given time t we will have
p+ + p� =p+ �aV
2+p� �aV
2= p: (50)
We summarize this by saying that the pressure p at any point and time is the sum oftwo pressure waves propagating at velocities V + a and V � a:
For hydro plants, the wave speed a is typically about 1000m= s and the maximum�uidspeed jV j is typically less than 3m= s. In these cases the propagation velocities V �aare nearly the same as the relative propagation velocities �a and we approximate therequirements for the characteristic curves by
c0 (t) =dx
dt= �a: (51)
With this approximation Equation 46 becomes
0 =dp
dt� �adV
dt+ �g
dx
dt
dz
dx(52)
=dp
dt� �adV
dt+ �g
dz
dt
=d
dt(p+ �gz � �aV ) :
Dividing by = �g, we then have
0 =d
dt
�p
+ z � a
gV
�=d
dt
�H � a
gV
�(53)
whereH =
p
+ z (54)
11

is the hydraulic head.
De�ning the two quantities
H+ =1
2
�H +
a
gV
�and H� =
1
2
�H � a
gV
�(55)
we see that H+ is constant along any path with dx=dt = a and that H� is constantalong any path with dx=dt = �a. We call H+ and H� head waves. And at theintersection of two paths having velocities dx=dt = �a, we will have hydraulic head
H = H+ +H� (56)
and �uid velocityV =
g
a(H+ �H�) : (57)
5 Library of Standard Program Blocks
5.1 Program Block Conventions
We adopt the conventions that the positive x direction is �downstream" towards theplant, static pressure p is relative to atmospheric pressure, and elevation z is withrespect to sea level. At t = 0 when the program starts, the hydraulic heads in all pipesections from the inlet to the �rst closed valve are initialized to the intake surfaceelevation z0. The initial hydraulic heads in sections between the discharge and the�rst closed valve are initialized to the discharge surface elevation zd.
The standard program blocks model two kinds of components: pipe sections and junc-tions between pipe sections. Each of these components has an upstream side (closestto the intake) and a downstream side (closest to the discharge). The graphical repre-sentation of each standard program block likewise has an upstream and downstreamside corresponding to the sides of the component which it models. Quantities pertain-ing to the downstream side of a block (closest to the discharge) are subscripted with 1and quantities pertaining to the upstream side of a component (closest to the intake)are subscripted with 2. The H� waves are represented explicitly by time-dependentinputs and outputs of the program blocks. The block inputs and outputs associatedwith the two head waves H+ and H� are labelled as follows:
1. output f1: the H+ wave exiting the downstream side,
2. input f2: the H+ wave entering the upstream side,
12

3. input F1: the H� wave entering the downstream side, and
4. output F2: the H� wave exiting the upstream side.
Details of the simulation program components are described below, beginning withthe uniform frictionless pipe section.
5.2 W-0: Elementary Pipe Section
f1f2
F2F1y
Delay
Tt = Ty( t <T ) = H0/2
PTt
y
Delay
Tt = Ty( t<T ) = H0/2
PTt
F1F2
f 2 f 1W0Initial headH0 mTravel timeT s
ElementaryPipe Section
<==Ff== >
<==Ff== >
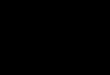
Figure 1: Block diagram of pipe section with no friction loss.
Figure 1 shows the program block W-0 for an elementary pipe section. The appear-ance of the block when inserted in a larger program is shown on the left and the blockdiagram is shown on the right. Positive x direction toward plant is from side 2 (left)to side 1 (right). The block has two parameters:
1. travel time T and
2. initial hydraulic head H0.
The travel time T for the pipe section is
T =L
a(58)
where L is the pipe section length and a is the pipe section wave speed. The initialhead H0 is the hydraulic head at t = 0 when the program begins. The input F1 attime t (the H� wave entering side 1 at time t) appears at the output F2 at time t+T .Likewise, the input f2 at time t (the H+ wave entering side 2 at time t) appears atthe output f1 at time t+ T .
13

5.3 Junctions Between Dissimilar Pipe Sections
5.3.1 Loss coe¢ cients between dissimilar pipe sections
In a junction between dissimilar pipe sections, the sections may have unequal wavespeeds and cross-sectional areas. Associated with unequal areas are di¤erent losscoe¢ cients across the junction depending on �ow direction. Unequal pipe sectionareas create a potential ambiguity in the loss coe¢ cient
k =�H
V 2= (2g)(59)
because the �uid velocity V will be di¤erent in the pipe sections on the two sidesof the junction. To resolve this ambiguity, we have simulation blocks with the losscoe¢ cients de�ned in terms of the velocity in the downstream (closer to plant) andupstream (closer to the inlet) sides of the junction.
5.3.2 J-1: Junction with loss coe¢ cients de�ned by downstream velocityhead
f1
f2 F2
F1
1
2
Divider
(a1+a2*(D1/D2) 2̂) 2̂
1
2
select:1 if V>02 if V<0
<A
B0
sqrtK = k1+1(D1/D2) 4̂
K
Scale
Scale
K = a1/g
K
Scale
K = a2/g * (D1/D2) 2̂
KK = k2+1(D1/D2) 4̂
K
Scale
v1
K = 4*g
K
Scale
a1+a2*(D1/D2) 2̂
F1F2
f2 f1J1Downstream diameter D1 mDownstream wave speed a1 m/sUpstream diameter D2 mUpstream wave speed a2 m/sLoss coefficient V>0 k1Loss coefficient V<0 k2Gravitational acceleration g m/s 2̂
Junction<==Ff== >
<==Ff== >
Figure 2: Block diagram of general pipe junction with loss coe¢ cients de�ned bydownstream velocity head.
14

Figure 2 shows the program block J-1 for a junction between dissimilar pipe sections.The block has seven parameters:
1. pipe section diameters D1 and D2 on sides 1 and 2;
2. wave speeds a1, a2 on sides 1 and 2;
3. loss coe¢ cient k1 for positive �ow direction (2 to 1),
4. loss coe¢ cient k2 for negative �ow direction (1 to 2), and
5. gravitational acceleration g.
In block J-1 the loss coe¢ cients are de�ned by the downstream velocity head. Ex-pressing the di¤erence in total head loss as a fraction of the downstream velocity headV 21 = (2g), we have �
f2 + F2 +V 222g
���f1 + F1 +
V 212g
�= k
V 212g
(60)
where V1 is the downstream �uid velocity, V2 is the upstream �uid velocity, k = k1for V1 > 0 and k = �k2 for V1 < 0. From Equation 57 we can express each of theunknown head waves
f1 = F1 +a1gV1 (61)
F2 = f2 �a2gV2 (62)
in terms of the known head waves f2 and F1 and the �uid velocities V1 and V2.Substituting these expressions for f1 and F2 into Equation 60 and rearranging, weobtain
4g (f2 � F1) = V1 (2a1 + V1) + V2 (2a2 � V2) + kV 21 : (63)
But from conservation of mass
V2 =
�D1
D2
�2V1 (64)
and so
4g (f2 � F1) = (2a1 + V1) +
�D1
D2
�2(2a2 � V2) + kV1
!V1: (65)
From the de�nition of k, kV1 > 0: So, in the case where the wave propagation speedsa1 and a2 are larger than the �uid speeds jV1j and jV2j,
(2a1 + V1) +
�D1
D2
�2(2a2 � V2) + kV1 > 0: (66)
15

From this it follows that V1 has the same sign as f2 � F1. Eliminating the remainingupstream �uid velocity V2 from Equation 65, we have
4g (f2 � F1) = (2a1 + V1) +
�D1
D2
�2 2a2 �
�D1
D2
�2V1
!+ kV1
!V1: (67)
Examining the solutions to the last equation
V1 =
��a1 +
�D1D2
�2a2
��
s�a1 +
�D1D2
�2a2
�2+ 4g (f2 � F1)
�k �
�D1D2
�4+ 1
�k �
�D1D2
�4+ 1
;
(68)it can be seen that the sign of V1 is the same as the sign of f2 � F1 only when thepositive square root is selected. In this case, the numerator is the di¤erence betweennearly equal quantities. Loss of numerical precision is avoided in the simulationprogram by using the equivalent formula
V1 =4g (f2 � F1)�
a1 +�D1D2
�2a2
�+
s�a1 +
�D1D2
�2a2
�2+ 4g (f2 � F1)
�k �
�D1D2
�4+ 1
� :(69)
The upstream velocity V2 is then computed using Equation 64 and the block outputsf1 and F2 are computed using Equations 61 and 62.
5.3.3 J-2: Junction with loss coe¢ cients de�ned by upstream velocityhead
Figure 3 shows the program block J-2 for a junction between dissimilar pipe sections.The parameters are the same as for block J-1 except that in block J-2 the loss coe¢ -cients k1 and k2 are de�ned in terms of the upstream velocity head. Expressing thedi¤erence in total head loss as a fraction of the upstream velocity head, we have�
f2 + F2 +V 222g
���f1 + F1 +
V 212g
�= k
V2 jV2j2g
(70)
where k = k1 for V2 > 0 and k = �k2 for V2 < 0. This equation can be reducedto an equation with the upstream velocity V2 being the only unknown by means ofEquations 61 and 62 together with
V1 =
�D2
D1
�2V2: (71)
16

f1
f2 F2
F1
1
2
Divider
1
2
select:1 if V>02 if V<0
<A
B0
sqrtv2
K = 4*g
K
ScaleK = k11+(D2/D1) 4̂
K
Scale
Scale
K = a1/g * (D2/D1) 2̂
K
Scale
K = a2/g
KK = k21+(D2/D1) 4̂
K
Scale
(a2+a1*(D2/D1) 2̂) 2̂ a2+a1*(D2/D1) 2̂
F1F2
f2 f1J2Downstream diameter D1 mDownstream wave speed a1 m/sUpstream diameter D2 mUpstream wave speed a2 m/sLoss coefficient V>0 k1Loss coefficient V<0 k2Gravitational acceleration g m/s 2̂
Junction<== Ff ==>
<== Ff ==>
Figure 3: Block diagram of pipe junction with losses de�ned by upstream velocityhead.
In block J-2 we compute the upstream velocity using the formula
V2 =4g (f2 � F1)�
a2 +�D2D1
�2a1
�+
s�a2 +
�D2D1
�2a1
�2+ 4g (f2 � F1)
�k +
�D2D1
�4� 1� :(72)
The downstream velocity V1 is then computed using Equation 71 and the block out-puts f1 and F2 are computed using Equations 61 and 62.
5.3.4 E-1: Pipe entrance
Figure 4 shows program block E-1 for a pipe entrance. This is a limiting case of theprogram block J-1 (Section 5.3.2) in which the upstream diameter D2 goes to in�nity.Equation 69 then reduces to
V1 =4g (f2 � F1)
a1 +pa21 + 4g (f2 � F1) (k + 1)
(73)
where k = k1 for V1 > 0 and k = �k2 for V1 < 0. Equation 64 reduces to V2 = 0 andEquation 62 reduces to
F2 = f2: (74)
17

f1
H0
F1
a 2̂
Divide
K = a/g
K uu
1
2
K = 0.5
K
Multiplier
K = 4*g
K
a
<A
B
1
2
select:1 if v >02 if v <0
0
1 k21 + k1
<== Ff ==>
F1H0
f1E1Wave speed a m/sLoss coefficient v>0 k1Loss coefficient v<0 k2Gravitational acceleration g m/s 2̂
Entrance
sqrt
Figure 4: Block diagram of pipe entrance.
And since the hydraulic head upstream of the pipe entrance is
H0 = f2 + F2; (75)
we must havef2 = H0=2: (76)
The �uid velocity downstream of the intake is then
V1 =4g (H0=2� F1)
a1 +pa21 + 4g (H0=2� F1) (k + 1)
(77)
and we can compute the head wave f1 travelling downstream from the intake usingEquation 61.
5.3.5 D-1: Pipe discharge
Figure 5 shows program block D-1 for a pipe discharge. This is a limiting case ofthe general junction J-2 (Section 5.3.3) in which the downstream diameter D1 goesto in�nity. Equation 72 then reduces to
V2 =4g (f2 � F1)
a2 +pa22 + 4g (f2 � F1) (k � 1)
(78)
where k = k1 for V2 > 0 and k = �k2 for V2 < 0. Equation 71 reduces to V1 = 0 andEquation 61 reduces to
f1 = F1: (79)
18

F2f2
Hd
a 2̂
Divide
K = a/g
K uu
1
2
Multiplier
K = 4*g
K
a
<A
B
1
2
select:1 if v >02 if v <0
0
k21k11
sqrt
K = 0.5
K
Hd
f2
F2
D1Wave speed a m/sLoss coefficient v>0 k1Loss coefficient v<0 k2Gravitational acceleration g m/s 2̂
Discharge<== Ff ==>
Figure 5: Block diagram for pipe discharge.
And since the hydraulic head downstream of the pipe discharge is
Hd = f1 + F1; (80)
we must haveF1 = Hd=2: (81)
The �uid velocity upstream of the discharge is then
V2 =4g (f2 �Hd=2)
a2 +pa22 + 4g (f2 �Hd=2) (k � 1)
(82)
and we can compute the head wave F2 travelling upstream from the discharge usingEquation 62.
5.4 Junctions Between Similar Pipe Sections
5.4.1 L-1: Loss junction between similar pipe sections
Figure 6 shows program block L-1 for a junction between similar pipe sections. Thisis a special case of the general junctions J-1 and J-2 in which the pipe sections oneach side of the junction have the same diameter D and wave speed a and where theloss coe¢ cients k do not depend on the �ow direction. In this special case, Equations
19

f1
f2 F2
F1
|x|
Divider
K = a/g
K uu
1
2
K = k
K
Scale
(a+a)^2
K = 4*g
K
Scale
a+a
F1F2
f2 f1L1Loss coefficient kWave speed a m/sGravitational acceleration g m/s 2̂
SymmetricLoss
<== Ff ==>
<== Ff ==>
Figure 6: Block diagram of constant symmetrical loss in uniform pipe.
69 and 72 each reduce to
V =4g (f2 � F1)
2a+q(2a)2 + 4gk jf2 � F1j
(83)
and block outputs f1 and F2 are computed using Equations 61 and 62.
5.4.2 W-1: Pipe section with friction loss
Figure 7 shows the program block W-1 for a pipe section with friction loss. Thedistributed friction loss is approximated by a single loss concentrated at the middleof the pipe section. This is accomplished by sandwiching a symmetric loss block L-1between two elementary pipe sections W-0. Each of the elementary pipe sectionshas a travel time which is half the travel time for the entire pipe section. The losscoe¢ cient is speci�ed by
k =fL
D(84)
where f is the Darcy-Weisbach friction factor, L is the entire pipe section length, andD is the hydraulic diameter of the pipe. The hydraulic diameter is de�ned to be
D =4A
P(85)
where A is the cross-sectional area and P is the wetted perimeter of the cross-section.For round pipes, the hydraulic diameter is the same as the inside diameter.
20

H
f1f2
F2 F1
Elevationz
F1F2
f2 f1W0H0T = (L/a)/2
ElementaryPipe Section
F1F2
f2 f1W0H0T = (L/a)/2
ElementaryPipe Section
F1F2
f2 f1L1k = f*L/Dag
SymmetricLoss
F1F2
f2 f1
W1 H
Initial head H0 mDownstream elevation z mLength L mWave speed a m/sHydraulic diameter D mFriction factor fGravitational acceleration g m/s 2̂
Pipe SectionWith Loss
<== Ff ==>
<== Ff ==>
Figure 7: Block diagram of pipe section with loss.
The static head H at side 1 (the downstream end for normal �ow direction) is calcu-lated according to
H = (f1 + F1)� z (86)
where z is the elevation of the downstream end of the pipe section. The static headH is the static gauge pressure expressed in meters of water.
5.4.3 V-1: In-line valve with variable loss coe¢ cient
Figure 8 shows the program block V-1 for a symmetric loss junction with a variableloss coe¢ cient k. This block is used to represent valves. The loss calculation inV-1 is optimized for large loss coe¢ cients up to and including in�nity. For thisreason the valve opening is speci�ed by the reciprocal of the loss coe¢ cient 1=k. Aninput of 1=k = 0 corresponds to a fully closed valve. Rewriting Equation 68 in thesymmetrical case with equal upstream and downstream �uid velocities V = V1 = V2,
21

1/k
f1
f2 F2
F1
Multiplier
K = a/g
21uKu
max1
2
MinMax
sign
K = a+a
K
Scale2x
|x|
Func 1
0
Multiplier
K = 4*g
21uKu
F1F2
f2 f1
V11/k
Wave speed a m/sGravitational acceleration g m/s 2̂
SymmetricInline Valve
<== Ff ==>
<== Ff ==>
Figure 8: Block diagram for inline valve with variable loss coe¢ cient.
pipe diameters D = D1 = D2 and wave speeds a = a1 = a2, we obtain
V =� (2a) +
q(2a)2 + 4g (f2 � F1) k0
k0; (87)
where k0 = k if f2�F1 � 0 and k0 = �k if f2�F1 < 0. Block V-1 computes the �uidvelocity on both sides of the valve using the equivalent formula
V = sign (f2 � F1)�q
(2a (1=k))2 + 4g jf2 � F1j (1=k)� 2a (1=k)�: (88)
5.4.4 V-2: In-line valve with variable �ow coe¢ cient
Figure 9 shows the program block V-2 in which the valve is characterized by the �owcoe¢ cient
CV =Qp�H
(89)
where Q is the �ow through the valve and �H is the head drop across the valve. Theprogram block computes the equivalent reciprocal of the loss coe¢ cient
1
k=
1
�H
V 2
2g=C2VQ2V 2
2g=1
2g
V 2
Q2C2V =
1
2gA2C2V (90)
22

Cv
f1f2
F2 F1
SQR
K = 1/(2*g)/( D 2̂ * pi/4 )^2
2Ku
F1F2
f2 f1
V11/k
ag
SymmetricInline Valve
F1F2
f2 f1
V2Cv
Diameter D mWave speed a m/sGravitational acceleration g m/s 2̂
SymmetricInline Valve
<== Ff ==>
<== Ff ==>
Figure 9: Block diagram for inline valve.with variable �ow coe¢ cient.
where the pipe cross-sectional area A is computed from the pipe diameter accordingto
A =�
4D2: (91)
The wave equations are then solved using block V-1.
5.5 B-1: Bifurcation
Figure 10 shows the program block B-1 for a pipe bifurcation with no losses. Thebifurcation is required to have equal total head in each of the three branches
f3 + F3 +V 232g= f1 + F1 +
V 212g= f2 + F2 +
V 222g: (92)
Also the �ow into branch 3 must equal the sum of the �ows exiting branches 1 and2, thus
D23V3 = D
21V1 +D
22V2. (93)
23

f3 F3
f2
F2
f1F1
K = a2/g
K
K = a3/g
K
K = 4*g
K(a1a3)(a1+a3)
c1
K = 4*g
K(a2a3)(a2+a3)
c2
a3 2̂
Initial u0 c1
c2
u0 u
NewtonStep
c1
c2
u0 u
NewtonStep
a3
a1v1
K = D3 2̂/D2 2̂
K
v3
K = D1 2̂/D2 2̂
Kv2
K = a1/g
K
F1
f1
F2
f2
F3
f3
B1
Wave speed branch 1 a1 m/sDiameter branch 1 D1 mWave speed branch 2 a2 m/sDiameter branch 2 D2 mWave speed branch 3 a3 m/sDiameter branch 3 D3 mGravitational acceleration g m/s 2̂
Bifurcation<== Ff ==>
<== Ff ==>
<== Ff ==>
Figure 10: Block diagram of bifurcation with no loss.
As for the previous junctions, the unknown head waves f1; f2, and F3 can be expressedin terms of the velocities and the known head waves F1, F2, and f3 according to
f1 = F1 +a1gV1 (94)
f2 = F2 +a2gV2 (95)
F3 = f3 �a3gV3: (96)
Inserting these expressions into Equation 92 and simplifying, we obtain
V 23 � 2a3V3 + 4gf3 = V 21 + 2a1V1 + 4gF1 = V 22 + 2a2V2 + 4gF2: (97)
The direct solution for the three velocities V1, V2, and V3 from Equations 93 and97 would require solving a fourth degree polynomial. Instead, we reduce these twoequations to a single nonlinear equation in one unknown which we solve using aniterative numerical scheme.
The nonlinear equation is derived by �rst completing the squares in Equation 97
(a3 � V3)2 +��a23 + 4gf3
�= (a1 + V1)
2 +��a21 + 4gF1
�= (a2 + V2)
2 +��a22 + 4gF2
�(98)
24

and making a change of variables
u = (a3 � V3)2 ; u1 = (a1 + V1)2 ; u2 = (a2 + V2)
2 : (99)
This change of variables yields the equivalent linear system
u+��a23 + 4gf3
�= u1 +
��a21 + 4gF1
�= u2 +
��a22 + 4gF2
�: (100)
From this linear system we can express
u1 = u+ c1
andu2 = u+ c2
in terms of the single variable u and two constants
c1 = a21 � a23 + 4g (f3 � F1) (101)
andc2 = a
22 � a23 + 4g (f3 � F2) : (102)
We can now express the three unknown �uid velocities in terms of the single unknownu according to
V1 =pu1 � a1 =
pu+ c1 � a1 (103)
V2 =pu2 � a2 =
pu+ c2 � a2 (104)
V3 = a3 �pu: (105)
Inserting these expressions for the �uid velocities into Equation 93 we obtain therequirement that
0 = G (u) = D21
�pu+ c1 � a1
�+D2
2
�pu+ c2 � a2
�+D2
3
�pu� a3
�(106)
where G (u) is a nonlinear function of the one unknown u. Program block B-1 �ndsan approximate solution to this equation by Newton�s method. In this method weapproximate G (u) near an approximate solution u0 by
G (u) � G (u0) + (u� u0)G0 (u0) : (107)
The value of u for which the approximation of G (u) is zero
u = u0 �G (u0)
G0 (u0)(108)
will be closer to the true solution of G (u) = 0 than the original approximation u0.Figure 11 shows the program block for computing the improved approximation of u
u = u0 �D21
pu0 + c1 +D
22
pu0 + c2 +D
23
pu0 � (a1D2
1 + a2D22 + a3D
23)
12
�D21=pu0 + c1 +D2
2=pu0 + c2 +D2
3=pu0� (109)
given an approximation u0. The bifurcation block uses a two-step Newton approxi-mation to calculate an approximate value of u. The �uid velocities V1 and V3 are thencomputed using Equations 103 and 105, and �uid velocity V2 is computed directlyfrom Equation 93. Finally the output head waves f1; f2, and F3 are computed usingEquations 94, 95, and 96.
25

u
u0
c2
c1
K = D1 2̂
uK
1
2
K = D2 2̂
uK
1
2
K = D3 2̂
uK
1
2
a1*D1 2̂ +a2*D2 2̂+a3*D3 2̂
K = 2
K uu
1
2
c1
c2
u0 u
Wavespeed branch 1 a1 m/sDiameter branch 1 D1 mWavepseed branch 2 a2 m/sDiameter branch 2 D2 mWavespeed branch 3 a3 m/sDiameter branch 3 D3 m
NewtonStep
Figure 11: Details of single Newton step for solving nonlinear equation G (u) = 0.
6 Area Modulus Formulas
For an axially constrained tube, the displacement dr of the wall material at a radiusr is given by
dr =(1 + �)
E (r2o � r2i )
��(1� 2�)r2i r +
r2i r2o
r
�dpi �
�(1� 2�)r2or +
r2i r2o
r
�dpo
�(110)
where dpi and dpo are the changes in the inside and outside pressures respectivelyand ri and ro are the initial inside and outside radii.[1] For thin-walled tubes, wherer0 � ri is much smaller than r0, we have the approximation
dr =1� �2E
r2
ro � ri(dpi � dpo) : (111)
26

For constant outside pressure po, the area modulus is therefore
K1 = AdpidA
=ri2
dpidri
=Ee
D (1� �2) (112)
where D is the tube diameter and e is the wall thickness.
For very thick tubes (i.e. tunnels) we have the approximation
dr =(1 + �)
E
�r2irdpi �
�(1� 2�)r + r
2i
r
�dpo
�(113)
for r and ri very small compared to r0. From this it follows that the area modulus is
K2 =ri2
dpidri
=E
2 (1 + �)= G: (114)
In the case of a lined tunnel we have a thin-walled tube bonded to a very thicktube each with di¤erent material properties. Letting b subscript denote where thematerials are bonded. We then have following variables:
1. inside radius of pipe ri,
2. inside pressure of pipe pi,
3. outside radius of pipe rb,
4. outside pressure of pipe pb,
5. inside radius of tunnel rb,
6. inside pressure of tunnel pb, and
7. outside pressure of tunnel po assumed constant.
From Equation 111 we have for the pipe
dri =1� �2E
r2irb � ri
(dpi � dpb) (115)
and from Equation 113 we have for the tunnel
drb =(1 + �)
Erbdpb: (116)
27

We then have an area modulus of
K3 =ri2
dpidri
(117)
=ri2
�d(pi � pb)dri
+dpbdri
�� ri
2
d(pi � pb)dri
+rb2
dpbdrb
= K1 +K2.
where we used the approximations ri � rb and dri � drb consistent with thin-walledapproximation for the steel pipe.
7 References
[1] Mechanics of Materials, Egor P. Popov, Second edition, Prentice-Hall, Inc., 1978.
28