Embed Size (px)
Citation preview
Model Parameter Estimation Using Ensemble Data Assimilation
-A Case with the NICAM and GSMaP -
RISDA2017-7thDAWS, March 2, 2017 @ Kobe, Japan
Shunji Kotsuki1, Koji Terasaki1, Hisashi Yashiro1,Hirofumi Tomita1, Masaki Satoh2, and Takemasa Miyoshi1,3
1Data Assimilation Research Team, RIKEN-AICS, Japan2The University of Tokyo, Japan
3University of Maryland, College Park, Maryland, USA
GSMaP: Global Satellite Mapping of Precipitation
Goals
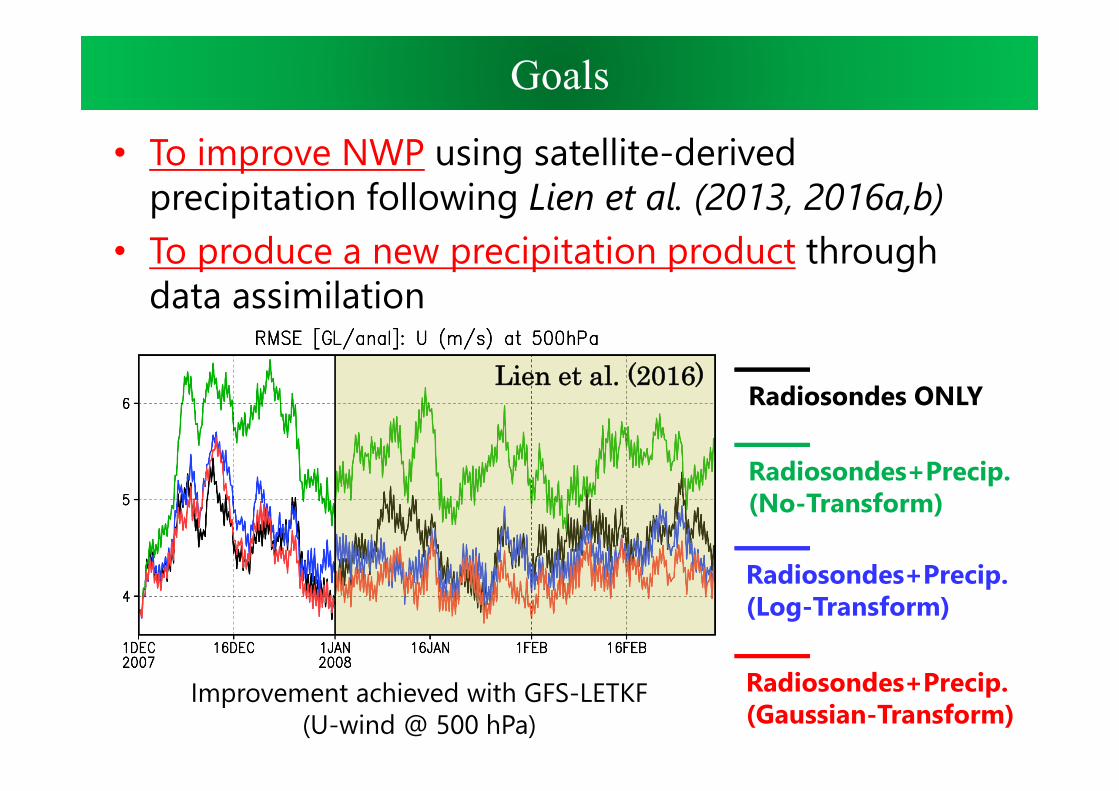
• To improve NWP using satellite-derived precipitation following Lien et al. (2013, 2016a,b)
• To produce a new precipitation product through data assimilation
Improvement achieved with GFS-LETKF(U-wind @ 500 hPa)
Lien et al. (2016)Radiosondes ONLY
Radiosondes+Precip.(No-Transform)
Radiosondes+Precip.(Log-Transform)
Radiosondes+Precip.(Gaussian-Transform)
Goals
• STEP1: State Estimation
• STEP2: Parameter Estimation
Kotsuki S., Miyoshi T., Terasaki K., Lien G.-Y. and Kalnay E. (2017): Assimilating the Global Satellite Mapping of Precipitation Data with the Nonhydrostatic Icosahedral Atmospheric Model NICAM. JGR-Atmospheres
• To improve NWP using satellite-derived precipitation following Lien et al. (2013, 2016a,b)
• To produce a new precipitation product through data assimilation
Experimental Setting
• Numerical Model– NICAM (Satoh and Tomita 2004, Satoh et al. 2008, 2014)
• GL6 (approx. 110 km resolution)
• Observations– CTRL: PREPBUFR: only upper sounding data (ADPUPA)– TEST: ADPUPA + GSMaP_Gauge (Ushio et al. 2009)
• with Gaussian transformation
• Data assimilation– LETKF (Hunt et al. 2007)– NICAM-LETKF (Terasaki et al. 2015) with 36 members
• 3D-LETKF• Localization: 400 km (horizontal) & 0.4 lnp (vertical)• Relaxation to prior perturbation (Zhang et al. 2004; α = 0.7)
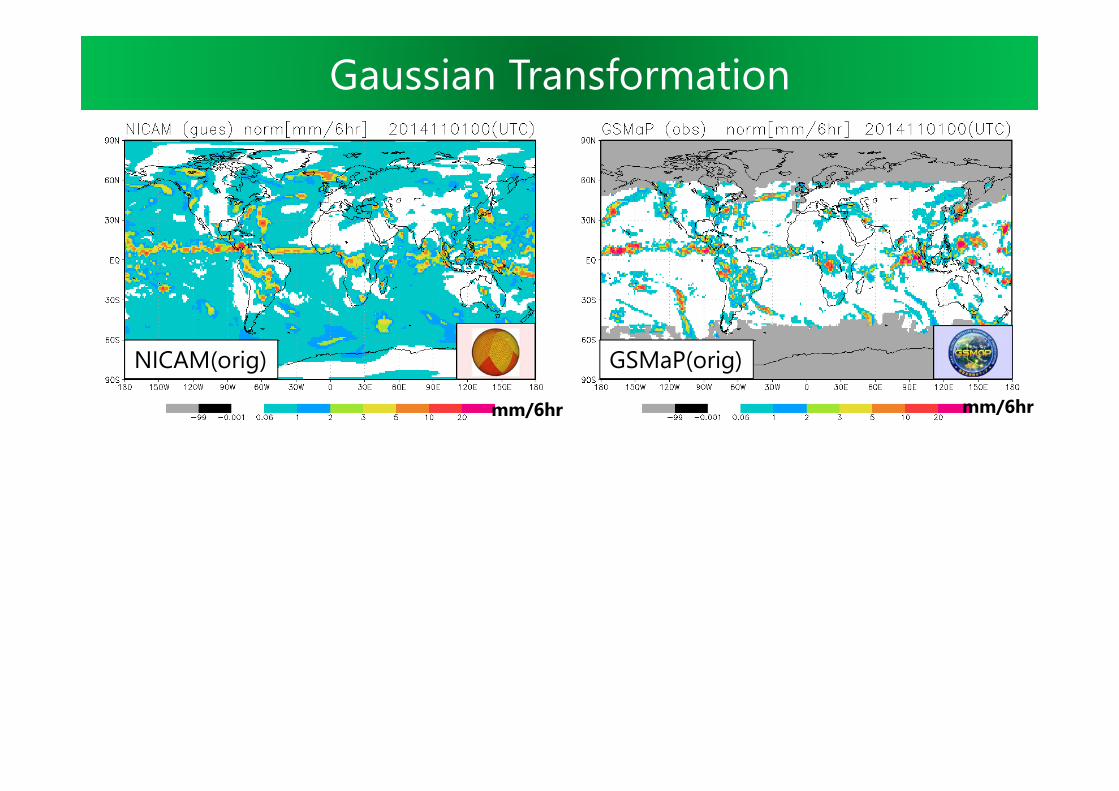
Gaussian Transformation
NICAM(orig) GSMaP(orig)
mm/6hr mm/6hr
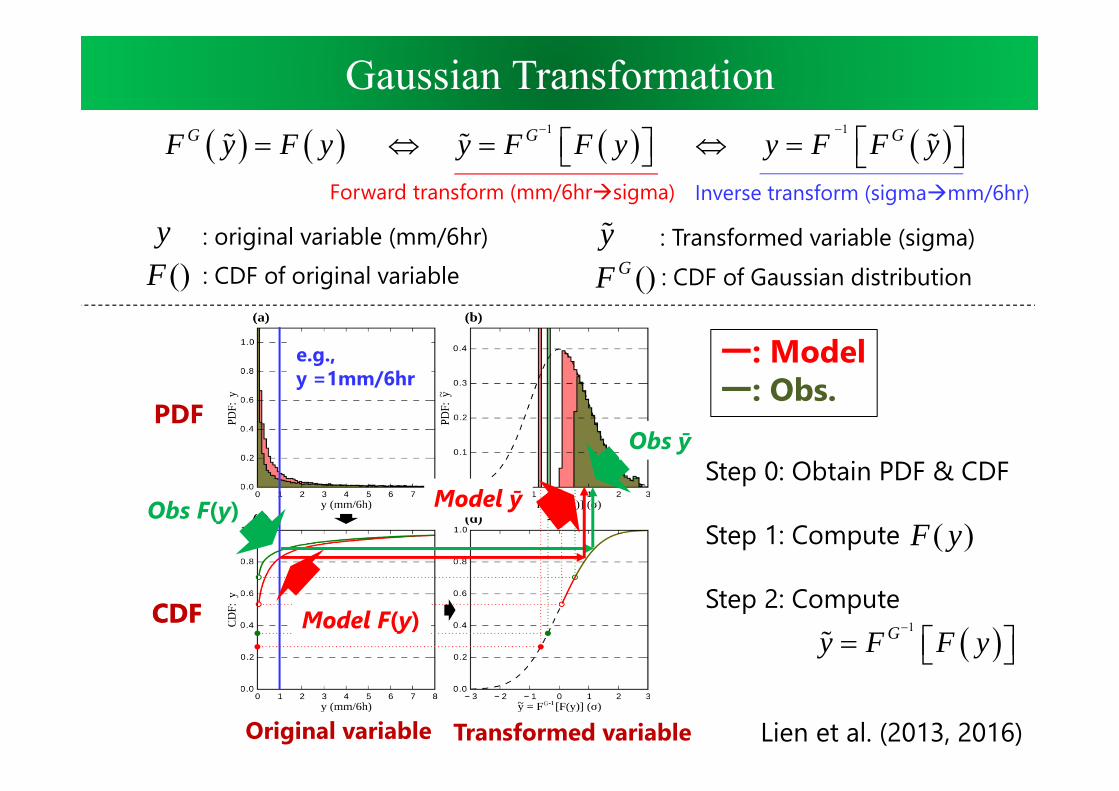
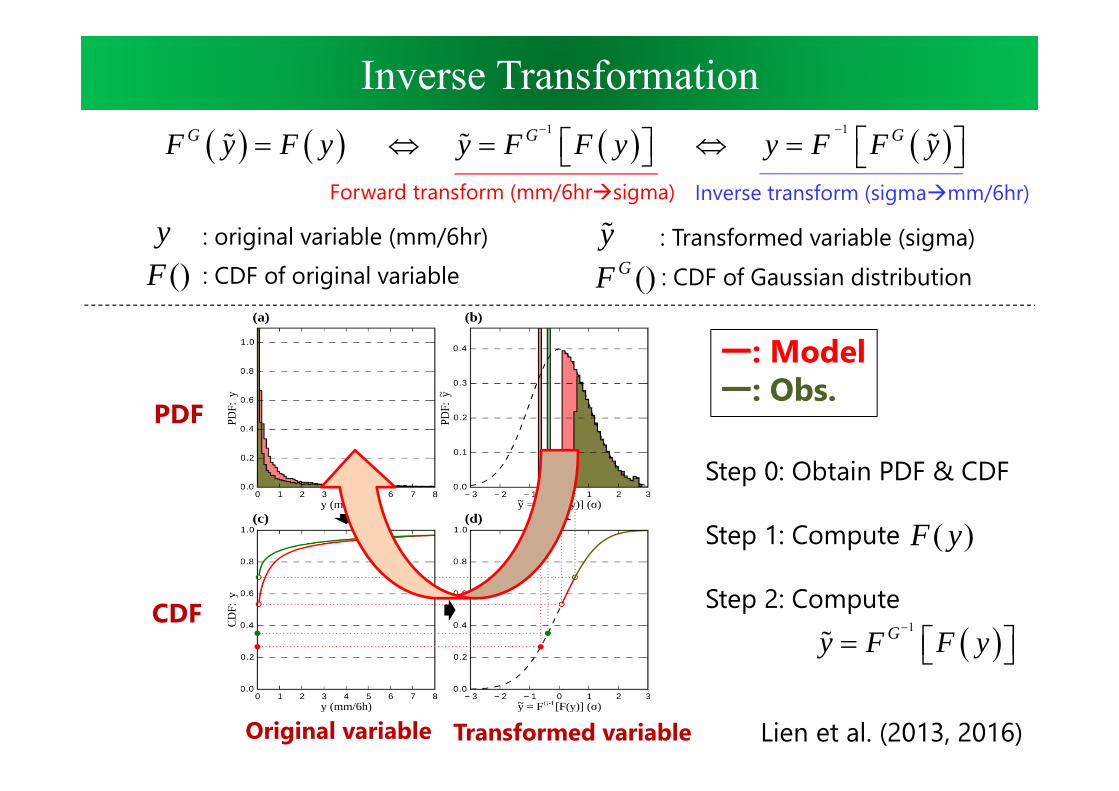
Gaussian Transformation 1 1G G GF y F y y F F y y F F y
Forward transform (mm/6hrsigma) Inverse transform (sigmamm/6hr)
()GF()F : CDF of Gaussian distribution: CDF of original variable y : original variable (mm/6hr) y : Transformed variable (sigma)
ー: Modelー: Obs.
CDF
Original variable Transformed variable Lien et al. (2013, 2016)
Step 0: Obtain PDF & CDF
Step 1: Compute
Step 2: Compute
( )F y
1Gy F F y
Obs ȳ
Model ȳ
CDF
Obs F(y)
Model F(y)
e.g., y =1mm/6hr
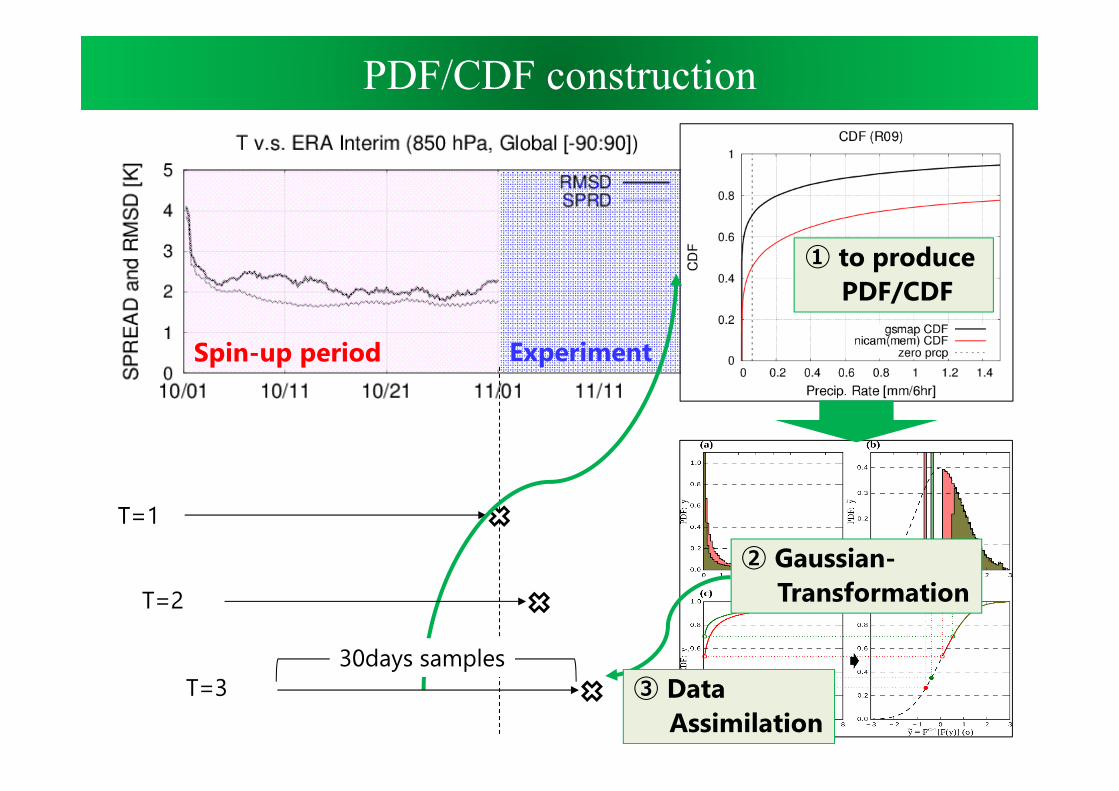
Spin-up period Experiment
T=1
① to produce PDF/CDF
② Gaussian-Transformation
③ Data Assimilation
T=330days samples
T=2
PDF/CDF construction
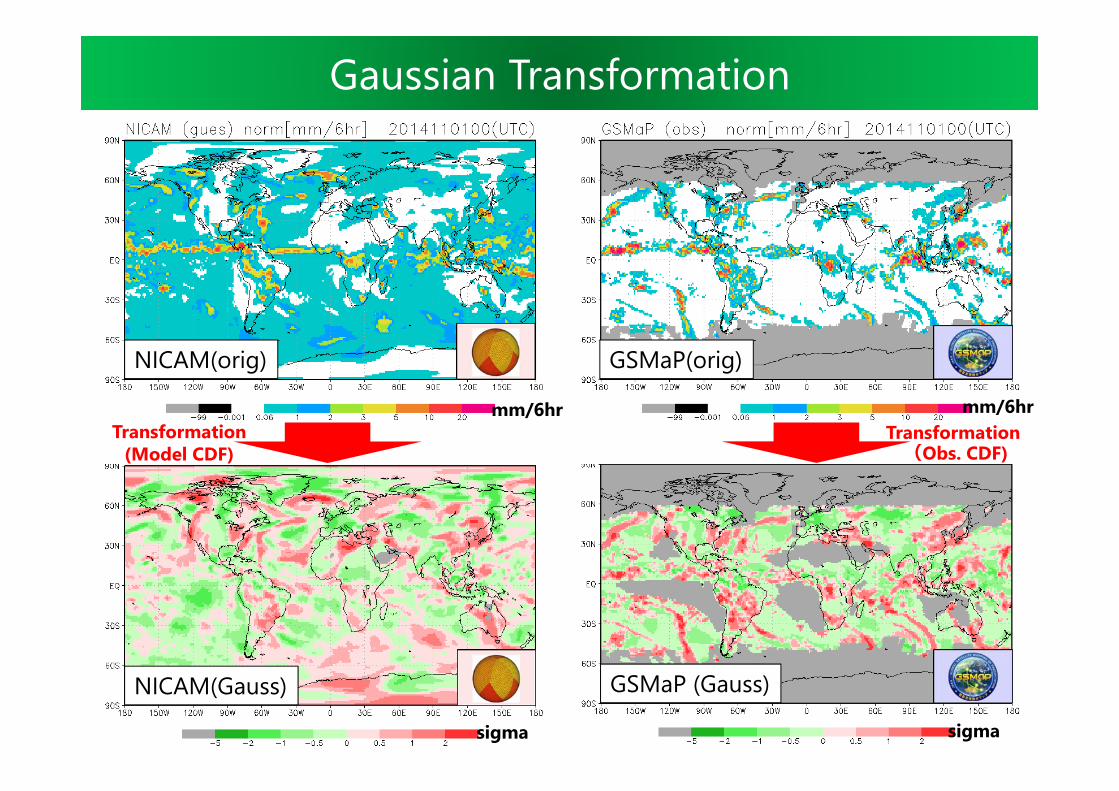
mm/6hr mm/6hr
NICAM(orig) GSMaP(orig)
sigma
NICAM(Gauss)
Transformation(Model CDF)
sigma
GSMaP (Gauss)
Transformation (Obs. CDF)
Gaussian Transformation
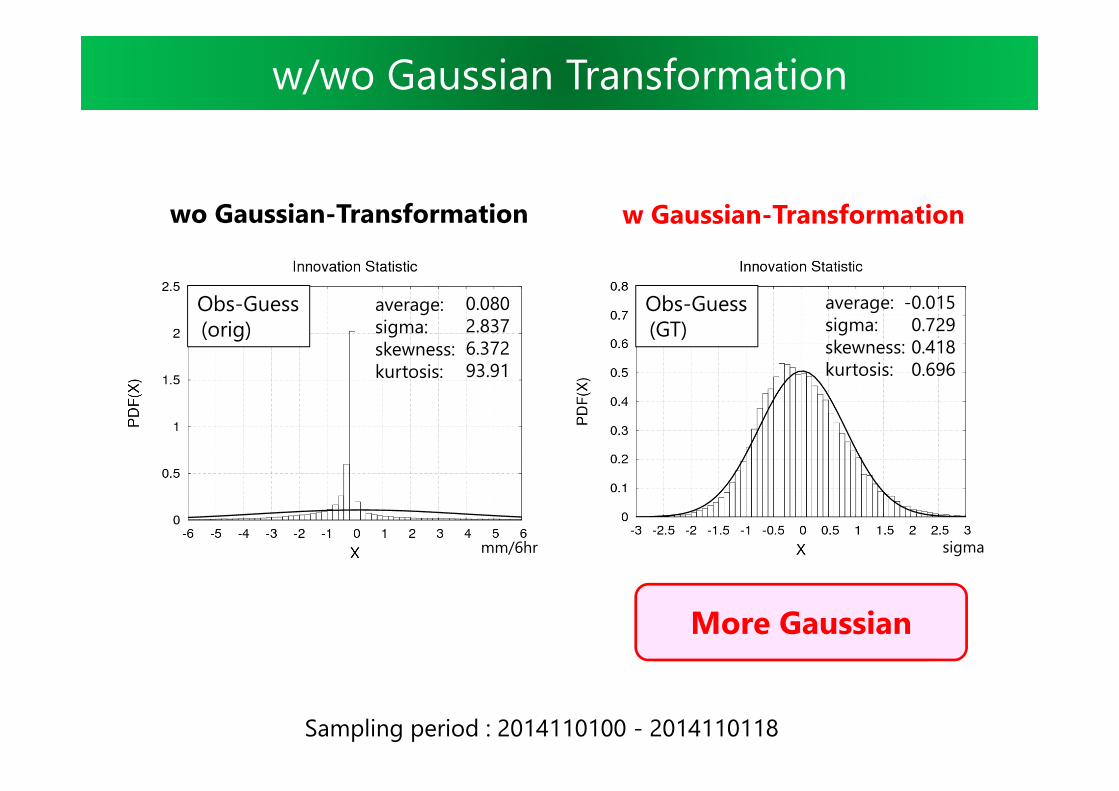
average: sigma: skewness: kurtosis:
-0.0150.7290.4180.696
sigma
average: sigma: skewness: kurtosis:
0.0802.8376.37293.91
mm/6hr
w/wo Gaussian Transformation
Obs-Guess(GT)
Obs-Guess(orig)
Sampling period : 2014110100 - 2014110118
wo Gaussian-Transformation w Gaussian-Transformation
More Gaussian
Inverse Transformation 1 1G G GF y F y y F F y y F F y
Forward transform (mm/6hrsigma) Inverse transform (sigmamm/6hr)
()GF()F : CDF of Gaussian distribution: CDF of original variable y : original variable (mm/6hr) y : Transformed variable (sigma)
ー: Modelー: Obs.
CDF
Original variable Transformed variable Lien et al. (2013, 2016)
Step 0: Obtain PDF & CDF
Step 1: Compute
Step 2: Compute
( )F y
1Gy F F y
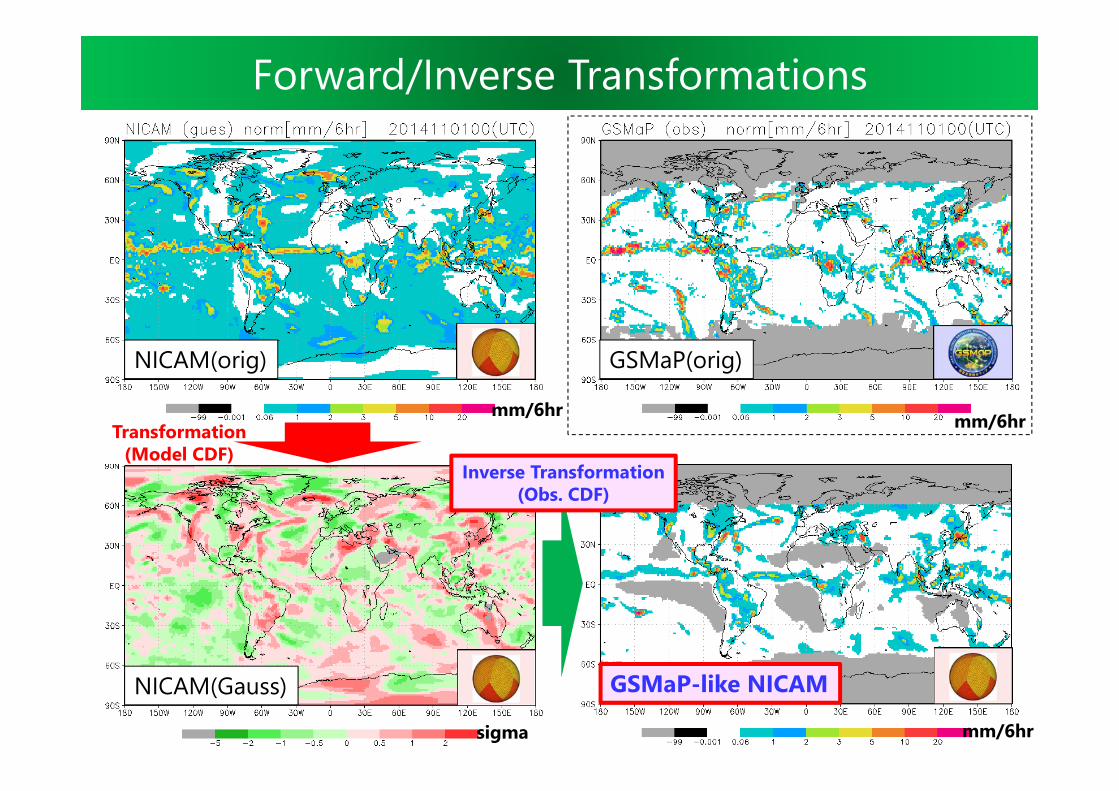
mm/6hr
GSMaP(orig)
mm/6hr
NICAM(orig)
NICAM(Gauss)
Transformation(Model CDF)
Forward/Inverse Transformations
GSMaP-like NICAM
Inverse Transformation(Obs. CDF)
sigma
mm/6hr
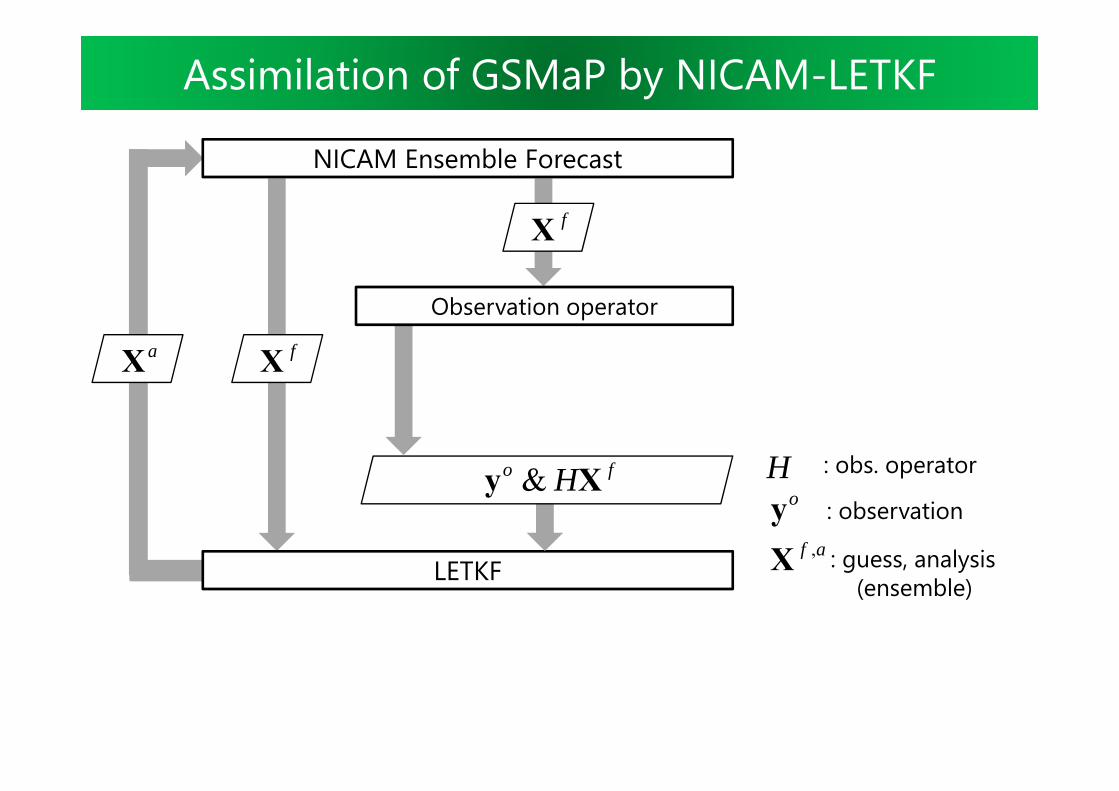
NICAM Ensemble Forecast
Observation operator
LETKF,f aX : guess, analysis
(ensemble)
oy : observationH : obs. operator
aX fX
fX
&o fHy X
Assimilation of GSMaP by NICAM-LETKF
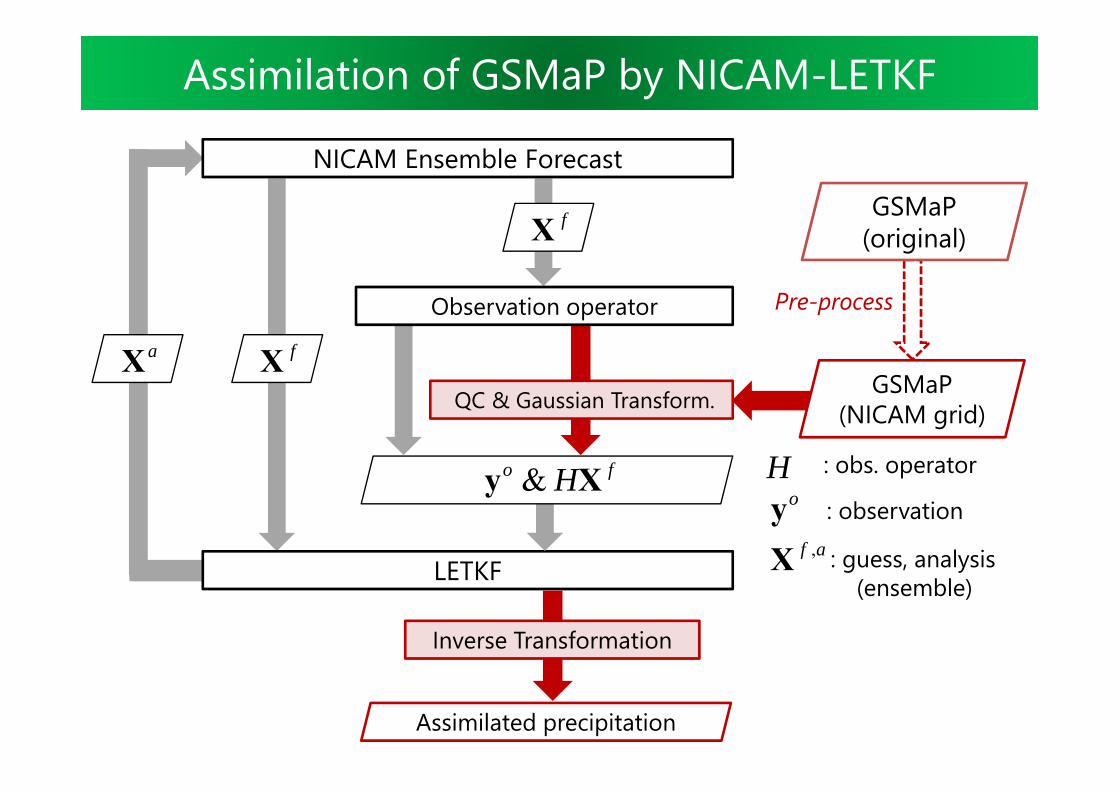
NICAM Ensemble Forecast
Observation operator
LETKF
QC & Gaussian Transform.
,f aX : guess, analysis(ensemble)
oy : observationH : obs. operator
GSMaP(NICAM grid)
GSMaP(original)
Pre-process
aX fX
fX
&o fHy X
Assimilation of GSMaP by NICAM-LETKF
Inverse Transformation
Assimilated precipitation
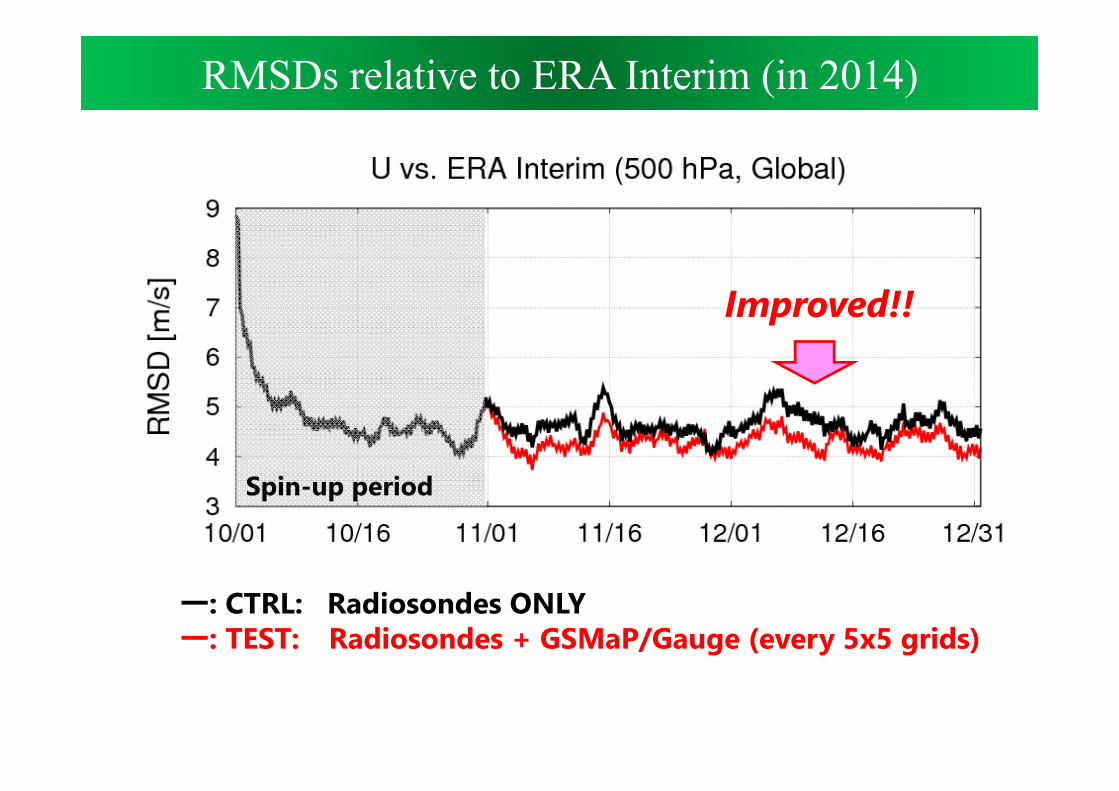
RMSDs relative to ERA Interim (in 2014)
Spin-up period
ー: CTRL: Radiosondes ONLYー: TEST: Radiosondes + GSMaP/Gauge (every 5x5 grids)
Improved!!
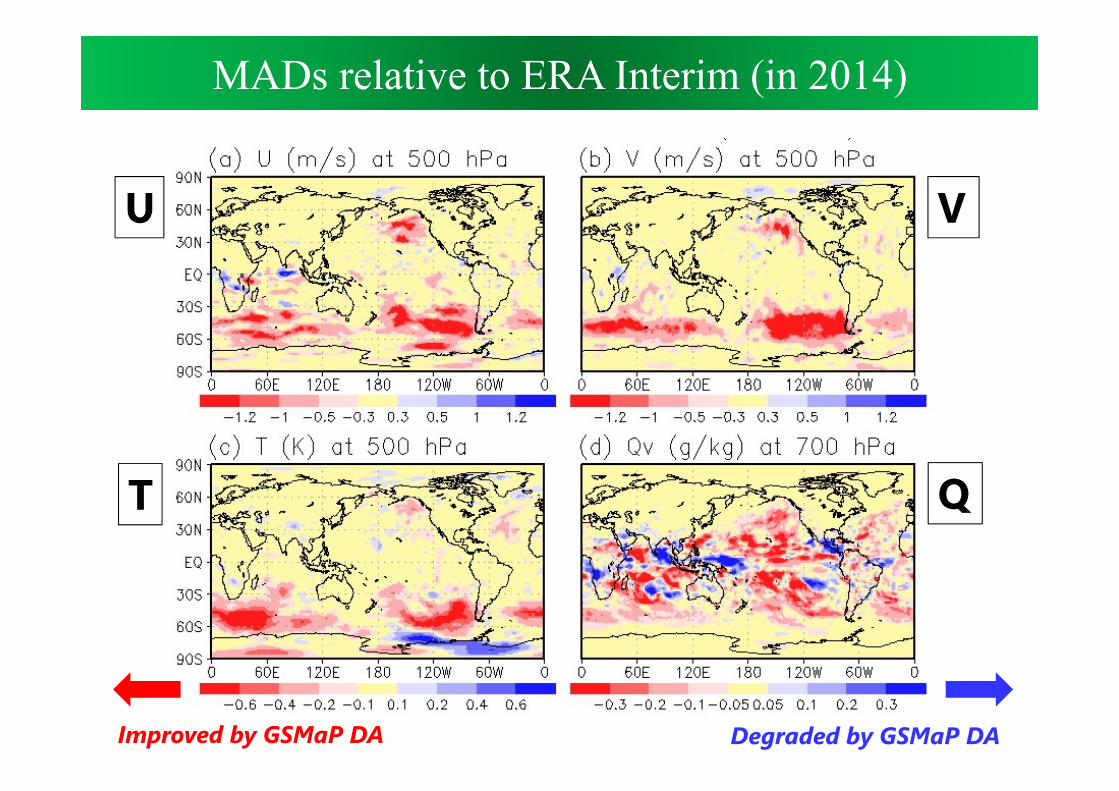
MADs relative to ERA Interim (in 2014)
U V
T Q
Improved by GSMaP DA Degraded by GSMaP DA
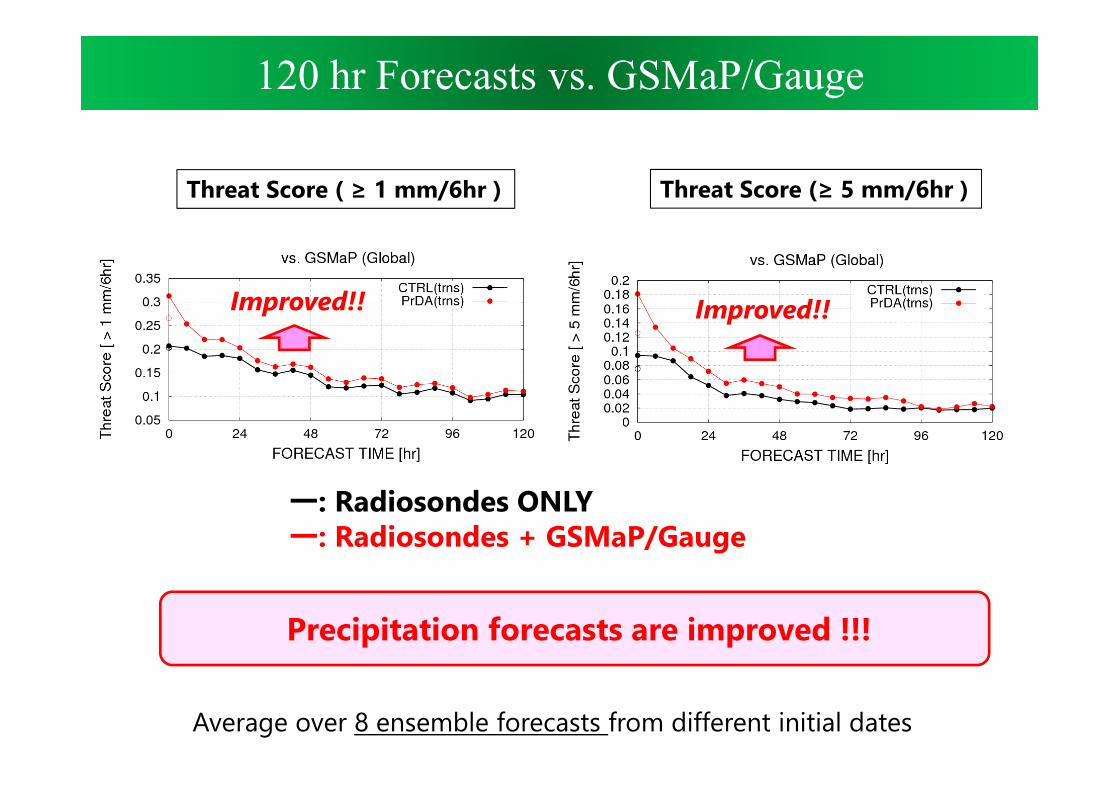
120 hr Forecasts vs. GSMaP/Gauge
Threat Score ( ≥ 1 mm/6hr )
Precipitation forecasts are improved !!!
Average over 8 ensemble forecasts from different initial dates
ー: Radiosondes ONLYー: Radiosondes + GSMaP/Gauge
Threat Score (≥ 5 mm/6hr )
Improved!! Improved!!
Outline
• STEP1: State Estimation
• STEP2: Parameter Estimation
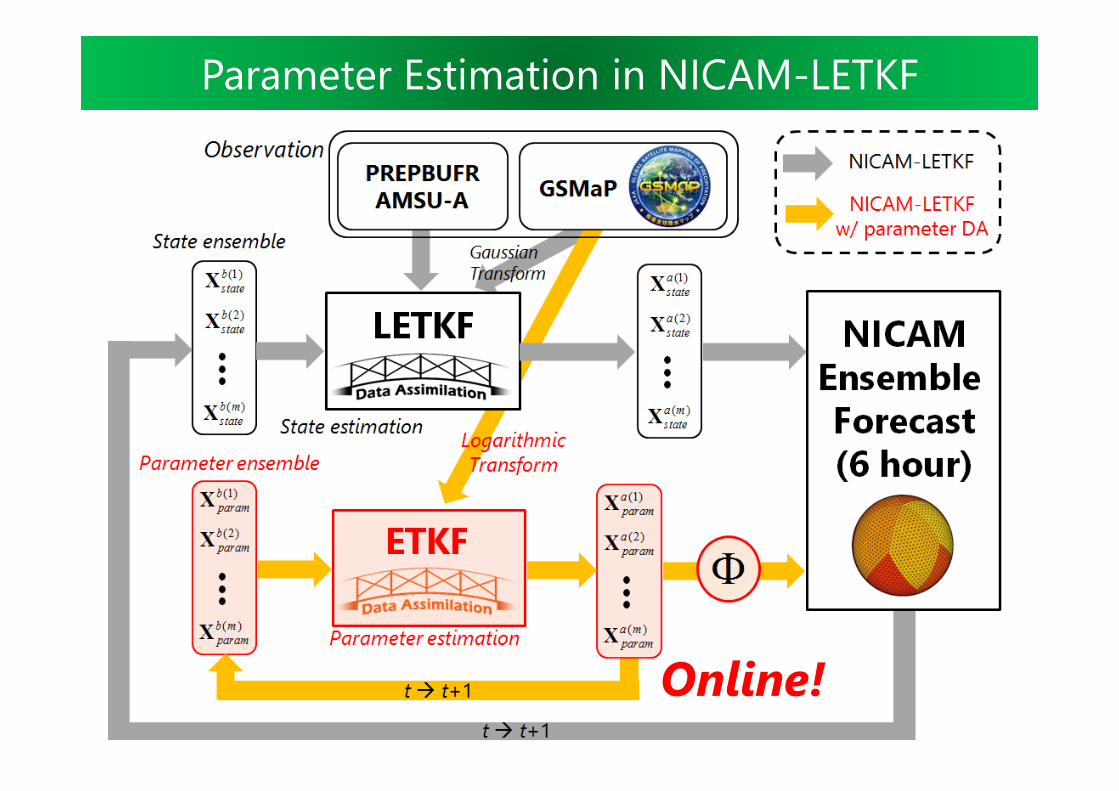
Parameter Estimation in NICAM-LETKF
Online!
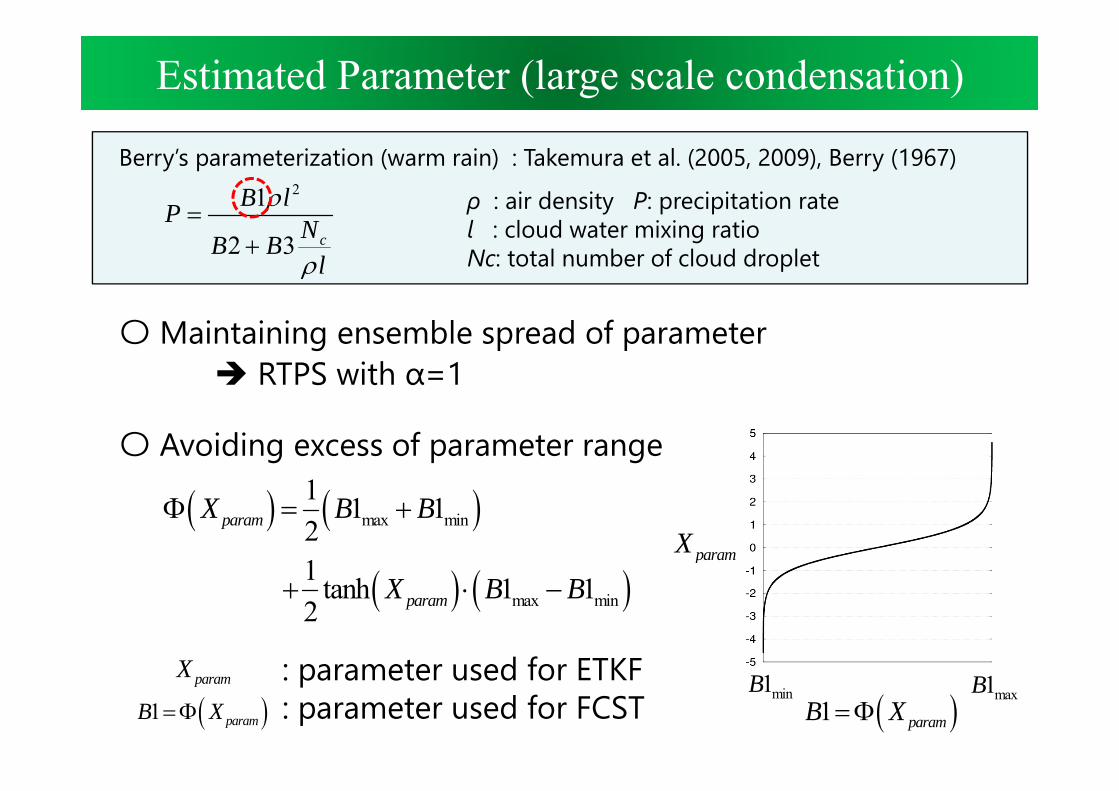
Estimated Parameter (large scale condensation)
Berry’s parameterization (warm rain) : Takemura et al. (2005, 2009), Berry (1967)21
2 3 c
B lP NB Bl
ρ : air density P: precipitation ratel : cloud water mixing ratioNc: total number of cloud droplet
max min1 1 12paramX B B
〇 Maintaining ensemble spread of parameter RTPS with α=1
〇 Avoiding excess of parameter range
paramX : parameter used for ETKF: parameter used for FCST
paramX
1 paramB Xmin1B max1B
1 paramB X
max min1 tanh 1 12 paramX B B
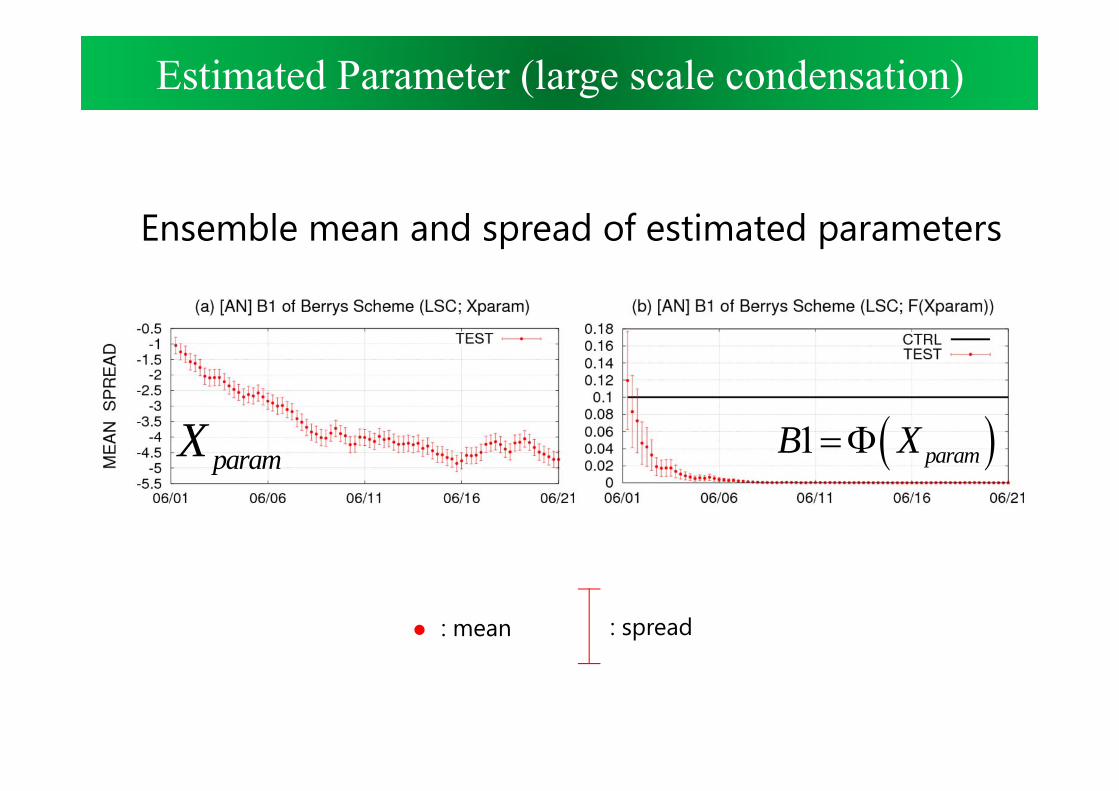
Estimated Parameter (large scale condensation)
Ensemble mean and spread of estimated parameters
paramX
: mean : spread
1 paramB X
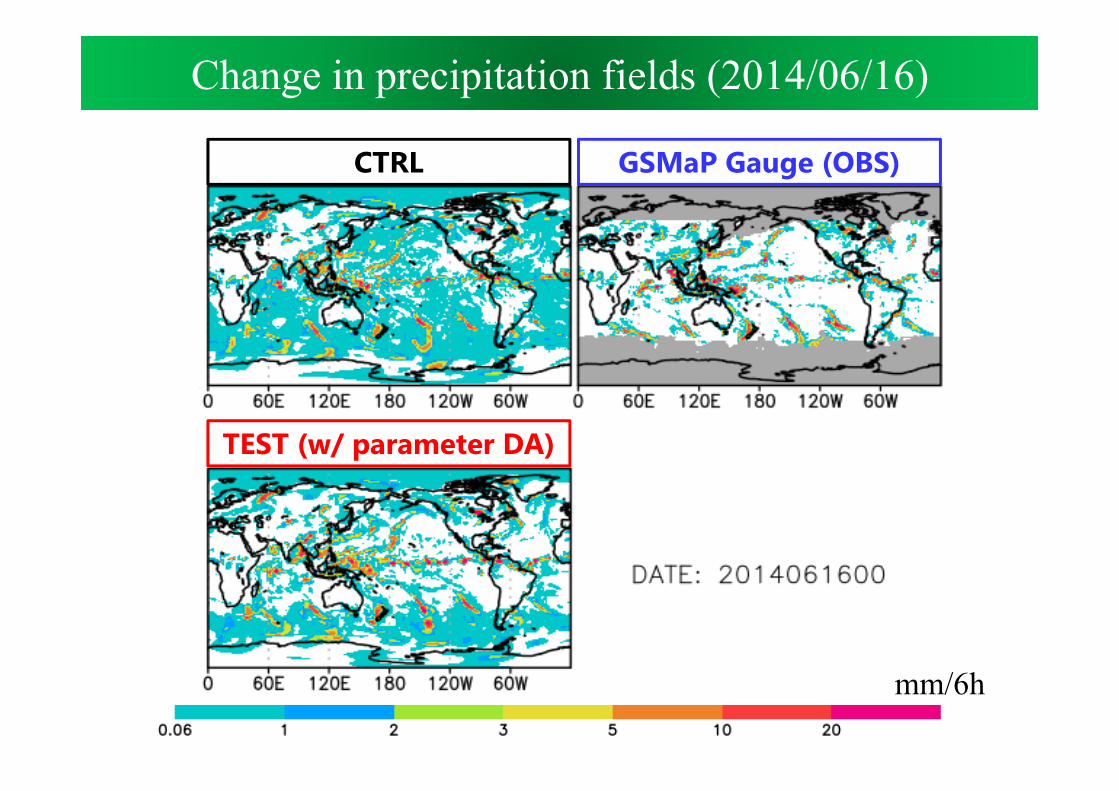
Change in precipitation fields (2014/06/16)
CTRL GSMaP Gauge (OBS)
TEST (w/ parameter DA)
mm/6h
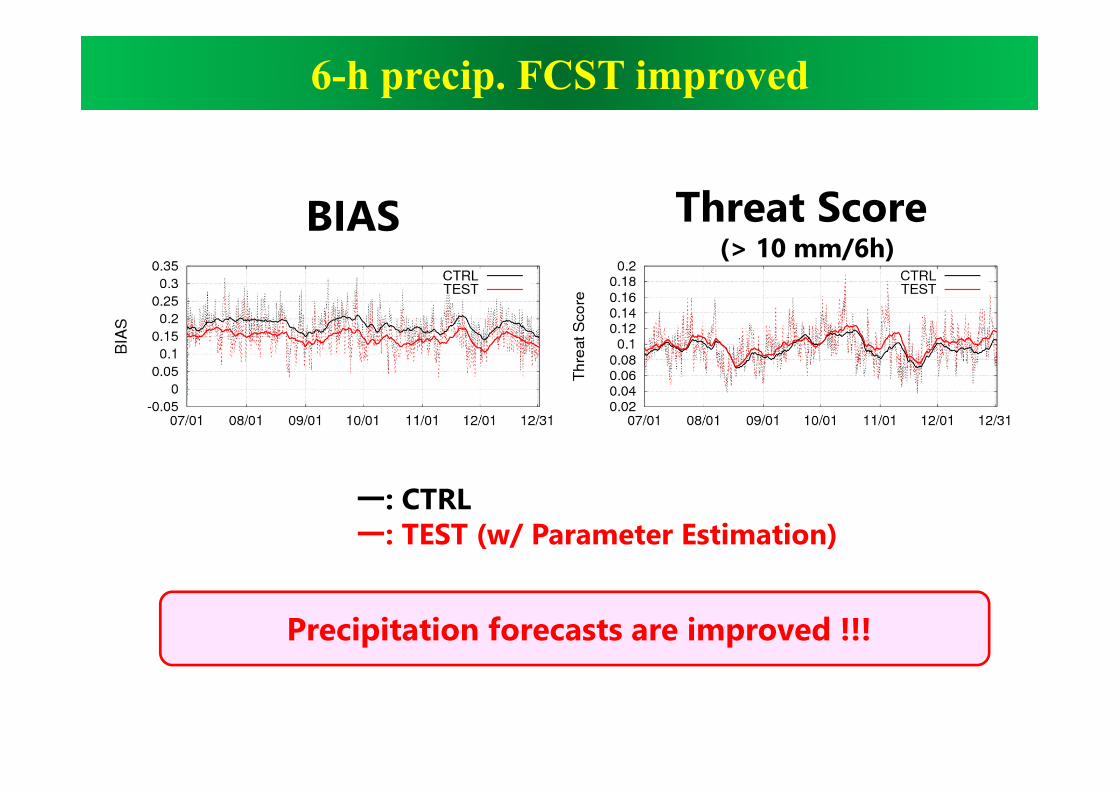
6-h precip. FCST improved
BIAS Threat Score (> 10 mm/6h)
Precipitation forecasts are improved !!!
ー: CTRLー: TEST (w/ Parameter Estimation)
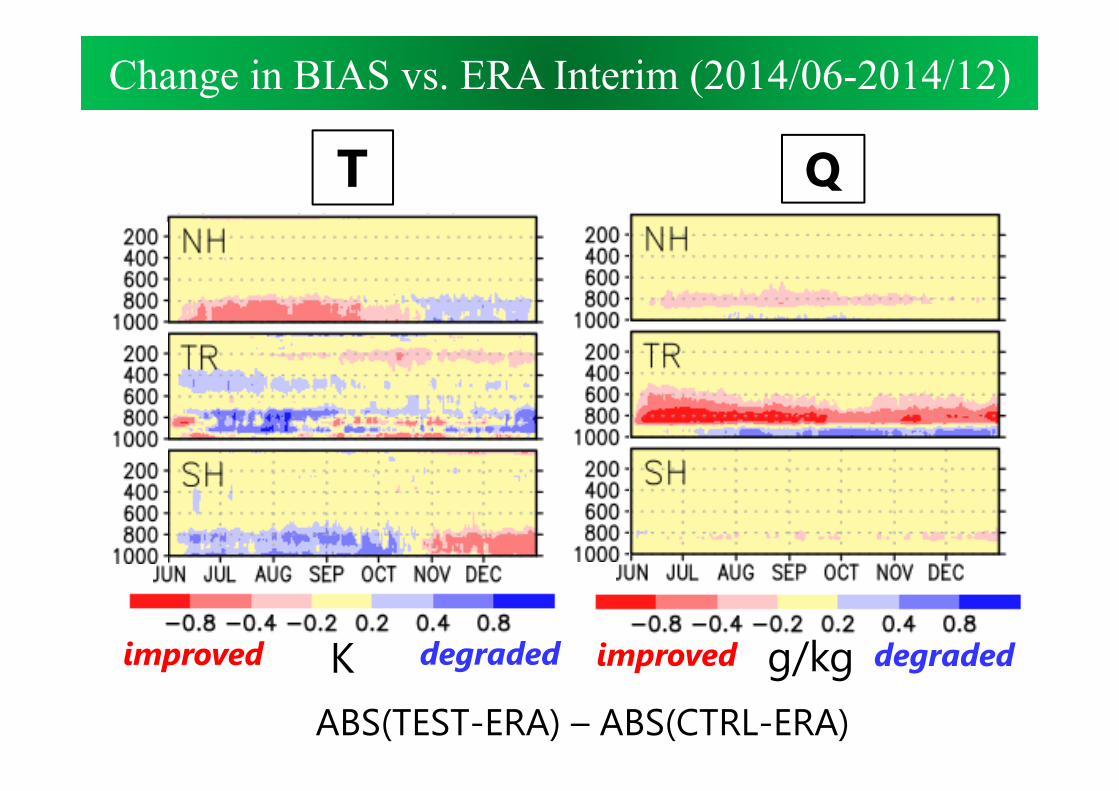
Change in BIAS vs. ERA Interim (2014/06-2014/12)
improved improved degradeddegradedK g/kg
T Q
ABS(TEST-ERA) – ABS(CTRL-ERA)
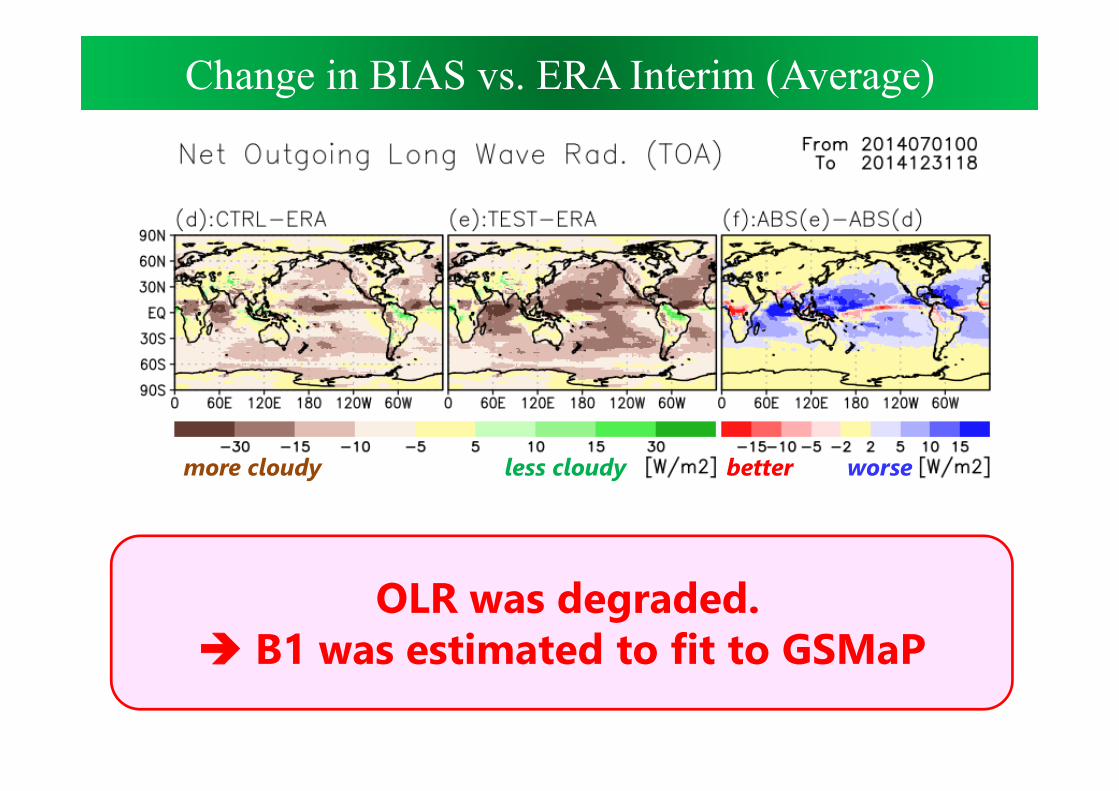
Change in BIAS vs. ERA Interim (Average)
less cloudymore cloudy better worse
OLR was degraded. B1 was estimated to fit to GSMaP
Summary
• Assimilating GSMaP data with NICAM-LETKF– State estimation
• Gaussian Transformation worked well• Analyses and forecasts were improved
– Parameter estimation• Precipitation forecasts were improved• Dry bias in the lower troposphere was improved• But, OLR was degraded
– Future plan• Estimate B1 parameter to fit with different references
Kotsuki S., Miyoshi T., Terasaki K., Lien G.-Y. and Kalnay E. (2017): Assimilating the Global Satellite Mapping of Precipitation Data withthe Nonhydrostatic Icosahedral Atmospheric Model NICAM. JGR-Atmosphere





























