-
Method of Finite Elements II Page 1
Solution of Equilibrium Equation in Dynamic Analysis
Mode Superposition
Dominik Hauswirth
21.11.07
-
Method of Finite Elements II Page 2
Contents
1. Mode Superposition: Idea and Equations
2. Example 9.7
3. Modes
4. Include Damping
5. Response contributions
-
Method of Finite Elements II Page 3
Mode Superposition1Dynamic Equilibrium Equation
RKUUCUM =++ &&&
Solving methods:• Central difference
• Houbolt
• Wilson θ
• Newmark
-
Method of Finite Elements II Page 4
Mode Superposition1Effectivity of this methods
Implicite methods(Houbolt, Wilson, Newmark)
1.) Initial calculations (LDLT) -> Number of operations:
2.) For each time step (Mult.) -> Number of operations
2
21
kmno ⋅⋅=
kmno ⋅⋅= 2
Where: n : matrix size, mk: half bandwidth
Number of operation is growing with bandwidth !
-
Method of Finite Elements II Page 5
Mode Superposition1Reduction of bandwidth1.) Optimize mesh
topology
-> Limited effect
2.) Transformation
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−−
−−−
⋅=
11001210
01210012
kK
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−−−
−−
⋅=
21011210
01101002
kK1
2
3
4
1
4
3
2
-
Method of Finite Elements II Page 6
Mode Superposition1Modal generalized displacements
{R
T
K
T
C
T
M
T RPXKPPXCPPXMPPRKPXXCPXMP
RKUUCUM
~~~~=++
=++
=++
321&
321&&
321
&&&
&&&
Transformation with unknown P, such that mk smaller
( ) ( )tXPtU ⋅=Dynamic Equation in modal displacements
In theory many different transformations possible –
in practice only one transformation matrix established !
-
Method of Finite Elements II Page 7
2D-Elements; linear1Transformation matrix
02 =− φωφ MK
Free-vibration equilibrium solutions with damping neglected:
By inserting U we obtain a eigenproblem:
( )( )0sin0
ttUKUUM
−⋅⋅=
=+
ωφ
&&
Postulated solution
with n solutions for eigenvector
iφ
2iωeigenvalue
Normalization:
⎩⎨⎧
=≠
=jiji
M jTi 1
0φφ 222
21 ...0 nωωω ≤≤≤≤
iφ
2iω
-
Method of Finite Elements II Page 8
2D-Elements; linear1Transformation matrixDefinitions
],...,,[ 21 nφφφ=Φ
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
=Ω
2
21
21
2
...
nω
ωω
Since the eigenvectors are M - orthonormal2Ω=ΦΦ=ΦΦ KIM TT
Eigenproblem for n equations
02 =ΦΩ−Φ MK
M and K diagonalized with TRANSFORMATION MATRIX Φ
],...,,[ 21 nφφφ=Φ )()( tXtU ⋅Φ=
-
Method of Finite Elements II Page 9
2D-Elements; linear1Transformed equation, Damping
neglectedMatrix equation
RXX
RXKXMKUUM
T
TT
I
T
Φ=Ω+
Φ=ΦΦ+ΦΦ
=+
Ω
2
2
0
&&
321&&
321
&&
Single decoupled equation i( ) ( ) ( )( ) ( )tRtr
nitrtxtxTii
iii
⋅=
==⋅+
φ
ω ,....,2,12&&
( ) UMtx Tii 00 φ==Transforming the initial conditions
-
Method of Finite Elements II Page 10
2D-Elements; linear1Solution of decoupled equation iDuhamel
integral
( ) ( ) ( )( ) ( ) ( )ttdtrtx iiit
iiii
i ⋅⋅+⋅⋅+−⋅⋅= ∫ ωβωαττωτω cossinsin1
0
Transforming to real displacement base
( ) ( )∑=
⋅=n
iii txtU
1φ
-
Method of Finite Elements II Page 11
Example2Example 9.7; p. 789
-
Method of Finite Elements II Page 12
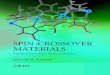
Example2Exact solution with mode superposition
Time history curve of exact solution
-2
-1
0
1
2
3
4
5
6
7
0 5 10 15 20 25
time [s]
disp
lace
men
t
u1_exaktu2_exakt
-
Method of Finite Elements II Page 13
Example2Newmark methodTwo possibilities, leading to the same
result
1.) Integrate straight forward -> SLOW
2.) Transform into modal displacements , integrate the decoupled
equations , transforme back -> FAST
RKUUM =+&&
RKUUM =+&& RXX TΦ=Ω+ 2&&
-
Method of Finite Elements II Page 14
Example2Newmark in MATLAB
25.05.028.0
===∆
αδ
t
Originally proposed as an unconditionally stablescheme by
Newmark
-
Method of Finite Elements II Page 15
Example2Newmark method
exact solution vs. Newmark
-2
-1
0
1
2
3
4
5
6
7
0 5 10 15 20 25
time [s]
disp
lace
men
t
u1_Newmarku2_Newmarku1_exaktu2_exakt
-
Method of Finite Elements II Page 16
Example2Benchmark
Time history curve
-0.5
0
0.5
1
1.5
2
2.5
3
3.5
0 0.5 1 1.5 2 2.5 3 3.5 4
time [s]
disp
lace
men
t
Newmarkexakt
-
Method of Finite Elements II Page 17
Modes3Number of modes in calculationFor n lumped masses in a
system, n modes were found - but for
a good approximation often only a few are needed!
Choosing the right modes for calculationIn general the lowest
frequencies and modes are approximated in
the best way -> upper bounds for frequencies are found
How many and which modes are taken for calculation depends on
the problem:
• Earthquake: In some cases only the 10 lowest modes
• Shock: Many modes necessary, p > 2/3 n
-
Method of Finite Elements II Page 18
Modes3Modes in Example 9.7
modes
-2
-1
0
1
2
3
4
0 5 10 15 20 25
time [s]
disp
lace
men
t
1st mode u11st mode u22nd mode u12nd mode u2
-
Method of Finite Elements II Page 19
Modes3Only first mode in Example 9.7 for displacement u1
u1: first mode - exact solution
-2
-1
0
1
2
3
4
0 5 10 15 20 25
time [s]
disp
lace
men
t
exakt_u11st mode u1
-
Method of Finite Elements II Page 20
Modes3Error MeasurementThe accuracy of a solution p < n can
be measured…
..and made better by the so called static correction
( )( ) ( ) ( )[ ]
( )2
2
tR
tKUtUMtRt
ppp
+−=
&&ε
( ) ( )tRtUK
MrRRp
iii
∆=∆⋅
−=∆ ∑=1
)( φ
Mode Superposition has more advantages then onlythe reduction of
number of necessary operations!
-
Method of Finite Elements II Page 21
Include damping4Include damping• Modal transformation was
derived without damping
• Transformation Matrix Φ diagonalizes M and K ….
• …but not a „free“ chosen damping Matrix C. In this case
theequations stay coupled and mode Superposition isn‘t possible
Rayleigh damping• If C is a linear combination of M and K
decoupling is possible, this
is called Rayleigh damping
KMC ⋅+⋅= βα
• In this case, there are only two free parameter for fitting
thedamping rate
-
Method of Finite Elements II Page 22
Include damping4Decoupled equations in case of Rayleigh
daamping
( ) ( ) ( )
ii
i
iiiiii trtxtxtx
βωωαζ
ωζω
+=
=⋅++
2
)(2 2&&&
If an accurate modelling of damping is necessary:
• Direct integration
• Caughey series
-
Method of Finite Elements II Page 23
Response contributions5Response contributionsSolving a dynamic
loaded, damped system, two response contributions
can be observed:
• Transient, damped out solution part
• A permanent dynamic response, which is the static
responsemultiplicated by a
dynamic load factor

 3] 2+ are also present in the crystal case. However, oscillations observed on this time scale](https://img.pdfslide.us/doc/110x75/60ca1d9192df2b6aee4d608f/feiibpy-pf-university-of-toronto-t-space-2017-3-27-aqueous-feiibpy.jpg)









![arXiv:1802.04952v3 [cond-mat.str-el] 18 Feb 20192 in a complex or framework the d-orbitals of an FeII ion aresplitbytheligandfield, , into, say, t 2g ande g or- bitals, Fig. 2b,c](https://img.pdfslide.us/doc/110x75/611192fa10d69221b265baa5/arxiv180204952v3-cond-matstr-el-18-feb-2019-2-in-a-complex-or-framework-the.jpg)


![Thaisa Storchi Bergmann Instituto de Física, UFRGS, Porto ...€¦ · Thaisa Storchi Bergmann Instituto de Física, UFRGS, Porto Alegre, RS, Brazil-600 [FeII]andH 2-520 N E-440 Far](https://img.pdfslide.us/doc/110x75/5f0d83e17e708231d43abdb1/thaisa-storchi-bergmann-instituto-de-fsica-ufrgs-porto-thaisa-storchi-bergmann.jpg)