Embed Size (px)
Citation preview

Mobile & Service RoboticsMobile & Service Robotics
KinematicsKinematicsKinematicsKinematicsBasilio Bona ROBOTICA 03CFIOR 1

Kinematics
Basilio Bona 2ROBOTICA 03CFIOR

Kinematics
the steering angle is the angle between the velocity vector and the steered wheel direction
( )tβ
is equivalent to the angle between the normal to the velocity vector and the steered wheel rotation axis we indicate with robot pose the position and the orientation (with respect to some give inertial axis)
( )( )t x y θ=pT
( )
0
( )
0
0
c sθ θ⎛ ⎞− ⎟⎜ ⎟⎜ ⎟⎜ ⎟R0 0
0 0 1m
s cθ θ⎜ ⎟= ⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎟⎜⎝ ⎠
R
⎝ ⎠
Basilio Bona ROBOTICA 03CFIOR 3

Instantaneous Curvature Centre (ICC)
If an ICC exists, the wheel motion occurs without slippage
ICCICC
Basilio Bona 4ROBOTICA 03CFIOR

ICC
If an ICC does not exist, the wheel motion occurs with slippage
?
wheels slip
Basilio Bona 5ROBOTICA 03CFIOR
wheels slip

Kinematics
δWj
WR
αδ
Wω
drj W
i
αrϕ=v
rR
yr
ωri
y
0R
Basilio Bona 6ROBOTICA 03CFIOR
x

Kinematics – Fixed wheel
Th ki ti d lThe kinematic model represents a rover frame with a generic
,α δ
( )i 0d ddTg
active non‐steering wheel, located at a given position with
( )cos sin 0d dα α=d
given constantsgiven position, with a local orientation
given constants
The kinematic equations describe the relations and
( )0x yv v=v
TLinear velocity of the wheel at the contact point with the planethe relations and
constraints between the wheel angular l it d th
( )0W Wx Wyω ω=ω
T
p
Angular velocity of the wheel
velocity and the angular velocity of the frame
( )
( )0 0 ω=ωT
Angular velocity of the robot ( )r rzg y
Basilio Bona 7ROBOTICA 03CFIOR

Kinematic constraints
Constraints:Hypothesis
θ=ω
Constraints:To avoid slippage the tangential velocity at the wheel contact point, due to the rover rotation around its
b l h d l f hr
W
θ
ϕ=
ω
ωcenter, must be equal to the advance velocity of the wheel
rϕ=v
In the wheel reference frame we have
( )T
T( )( )
T
T
0 0 1
0 1 0
rθ
ϕ
=
=
ω
ω ( )( )
T
0 1 0
1 0 0
W
r
ϕ
ϕ
=
=v
ω
Basilio Bona 8ROBOTICA 03CFIOR
( )

Differential Drive (DD) Rover
Left wheel, active, non steering
Passive supportpp(castor, omniwheel)
Right wheel, active, non steering
Basilio Bona 9ROBOTICA 03CFIOR
Right wheel, active, non steering

Differential Drive Rover
jrj
L ft h lLeft wheel
2r
i
2r
ri
rk
2
Right wheel
Basilio Bona 10ROBOTICA 03CFIOR

Differential Drive KinematicsICC
( )tθ
ICC
( )
( )t( )tvr
R
( )tv ( )tv
( )tvBasilio Bona 11ROBOTICA 03CFIOR
( )rtv
0R

Differential Drive Kinematics
( )tv ( )( )tθICC
( )tv( )rtv
( )
Basilio Bona 12ROBOTICA 03CFIOR
0R

Differential Drive Kinematics
ICC
C Consider the generic time instant iC
vρ
vvi
ρ
rv
Basilio Bona 13ROBOTICA 03CFIOR

Differential Drive Kinematics
vrv
v
afterC
rR
iC
vv
r>v v
>v v
Turn left
Turn right
Rrv
r>v v Turn right
rR
before
Basilio Bona 14ROBOTICA 03CFIOR

Differential Drive Kinematics
C
tδθ
iC
t
θ
Basilio Bona 15ROBOTICA 03CFIOR

Differential Drive Kinematics
kδθ
ikC
kθ
kδθ
ik rkρ− j k
1k+tk
0j ik
c
ik kρ j k
θ
0
ik rkρ j k
0i
0rkt
0R
Basilio Bona 16ROBOTICA 03CFIOR
00

Differential Drive Kinematics
A
ikC
B
AB = tk
δθB
ks
ks
A sA 2k
δθ rks
Basilio Bona 17ROBOTICA 03CFIOR

Differential Drive Kinematics
ICCsin
cosxk k k k
k
C x
C y
ρ θρ θ
⎡ ⎤ ⎡ ⎤−⎢ ⎥ ⎢ ⎥= =⎢ ⎥ ⎢ ⎥+⎢ ⎥ ⎢ ⎥cosyk k k kC y ρ θ+⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
;rk k rk kv v s s
ω δθ− −
( / 2)
( / )k k rk
vω ρ + =;rk k rk k
k k
rk kv v
v
ω δθ= =
+= ( / 2)
k k kvω ρ − =2
( )k
k rk k
v
v v vρ
=
+= =
2 ( )kk rk k
v vρ
ω= =
−
Basilio Bona 18ROBOTICA 03CFIOR

Differential Drive Kinematicst t
0 0
( ) cos ( ) ( ) d ; ( ) sin ( ) ( ) d ;t t
x t v y t vθ τ τ τ θ τ τ τ= =∫ ∫0 0
( ) ( ) dt
tθ ω τ τ= ∫Approximation when sampling period is small
0∫
1
ddk k k k k
Tt
ω θ ω θ θ δθ+= ⇒ −dt
1cos( ) sin( ) 0
k k k k xk xkx x C Cδθ δθ+⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤− −⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥
1sin( ) cos( ) 0
0 0 1k k k k yk yky y C Cδθ δθθ θ δθ
+⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥= − +⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦
(A)
Basilio Bona 19ROBOTICA 03CFIOR
10 0 1
k k kθ θ δθ+⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦

Differential Drive Kinematics
EULER APPROXIMATION
1cos
k k k kx x v T θ+ = +
1
1
sink k k k
k k k
y y v T
T
θθ θ ω
+
+
= += +
1k k k+
Basilio Bona 20ROBOTICA 03CFIOR

Differential Drive Kinematics
RUNGE‐KUTTA APPROXIMATION
1
1cos
k k k k kx x v T Tθ ω+
⎛ ⎞⎟⎜= + + ⎟⎜ ⎟⎜1 21
sin
k k k k k
y y v T Tθ ω
+ + + ⎟⎜ ⎟⎝ ⎠⎛ ⎞⎟⎜= + + ⎟⎜1
1
sin2k k k k k
k k k
y y v T T
T
θ ω
θ θ ω
+
+
= + + ⎟⎜ ⎟⎜ ⎟⎝ ⎠= +
1k k k+
Basilio Bona 21ROBOTICA 03CFIOR

Differential Drive Kinematics
EXACT INTEGRATION
( )1 1sin sink
k k k kx x
ωθ θ+ += + −( )
( )
1 1
1 1cos cos
k k k kk
kk k k k
v
y yω
θ θ
+ +
+ += − − (B)( )1 1
1
k k k kk
k k k
y yvTθ θ ω
+ +
+ = +
(A) and (B) are the sameBasilio Bona 22ROBOTICA 03CFIOR
(A) and (B) are the same

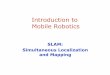
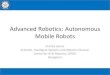
Odometry
Odometry is the estimation of the successive robot poses based on the wheel motion. Wheel angles are measured and used for pose computation
Odometric errors increase with the distance covered, and are due to many causes, e.g.
Imperfect knowledge of the wheels geometryk i i h id l b hUnknown contact points: in the ideal DD robot there are two
geometric contact points between wheels and ground. In real robots the wheels are several centimeters wide and the actual contact points are undefinedSlippage of the wheel wrt the terrain
Errors can be compensated sensing the environment around the robot and comparing it with known data (maps, etc.)
Basilio Bona 23ROBOTICA 03CFIOR

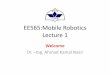
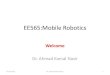
Odometry Errors
MapDesired path
Estimated pathbased only on odometry
Basilio Bona 24ROBOTICA 03CFIOR
Map

Other important problems that must be addressed
1. Path planning: the definition of an “optimal” geometric path in the environmentpath in the environment
2. Mapping: how to build environment maps (geometrical vs semantic))
3. Localization: where am I?
4. Simultaneous Localization and Mapping (SLAM): build a map and at the same time localize the robot in the map
Basilio Bona 25ROBOTICA 03CFIOR
map and at the same time localize the robot in the map while moving

Path Planning
Path planning: it computes which route to take, from the initial to the final pose, based on the current internal representation of the terrain and considering a “cost function” (minimum time, minimum energy, maximum comfort, etc)Complete path generation: this path is created as a sequence of successive moves from the initial poseMotion planning: is the execution of this theoretical route, by translating the plan from the internal representation to the physical movement of the wheels Next move selection: at each step, the algorithm must decide which way to move next. An efficient dynamic implementation is required
Basilio Bona 26ROBOTICA 03CFIOR

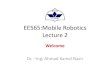
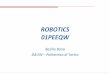
Path Planning
NavigationWhere am I going? Mission planningWhat’s the best way there? What s the best way there? Path planningWhere have I been? Map
Mi iC t ive
makingWhere am I? Localization
MissionPlanner
Carto-grapher
elib
erat
ide
BehaviorsBehaviors
BehaviorsB h i ti
ve
How am I going to getthere?
Behaviors
reac
t
Basilio Bona 27ROBOTICA 03CFIOR
Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000

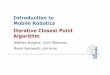
Path Planning
BFixed
obstaclesMobile obstacles
Velocity constraints
Acceleration constraints
A
Basilio Bona 28ROBOTICA 03CFIOR

Path Planning
2k =
k N=
1k =
j
1k =
0j
0k =
0i0k0R
Which commands shall I give to the rover?
Basilio Bona 29ROBOTICA 03CFIOR

Path Planning
Final pose
B
Final pose
Path BPath A
Initial poseA
Basilio Bona 30ROBOTICA 03CFIOR

Motion Planning
Final pose
Move 3:rotationB
p
Move 2: go straight
Move 1: rotationA
Initial pose
A
Basilio Bona 31ROBOTICA 03CFIOR

Non‐holonomic constraints
Non‐holonomic constraints limit the possible incremental movements in the configuration space of the robot
Robots with differential drive move on a circular trajectory j yand cannot move sideways
O i h l b t idOmni‐wheel robots can move sideways
Basilio Bona 32ROBOTICA 03CFIOR

Holonomic vs. Non‐Holonomic
Non‐holonomic constraints reduce the control space withNon holonomic constraints reduce the control space with respect to the current configuration (e.g., moving sideways is impossible)p )Holonomic constraints reduce the configuration space
Basilio Bona ROBOTICA 03CFIOR 33

Academic year 2010/11 by Prof. Alessandro De Luca
34ROBOTICA 03CFIOR

Academic year 2010/11 by Prof. Alessandro De Luca
35ROBOTICA 03CFIOR

Academic year 2010/11 by Prof. Alessandro De Luca
36ROBOTICA 03CFIOR

Academic year 2010/11 by Prof. Alessandro De Luca
37ROBOTICA 03CFIOR