Embed Size (px)
Citation preview

Methodology for Modeling the SVN49 Anomalyfor Static Scenarios
Gary FayThe Aerospace Corporation, El Segundo, California
Paul CramptonSpirent Federal Systems, Boston, Massachusetts
Biography
Gary Fay received his B.S. in Engineering and AppliedScience at the California Institute of Technology (1996),his M.S. in the Aeronautics and Astronautics Departmentat Stanford Univerisity (1999), and his Ph.D. in theMechanical and Aerospace Engineering Department atthe University of California, Los Angeles (2010). Heis currently an Engineering Specialist working for TheAerospace Corporation since 2002.
Paul Crampton is a Senior Systems Engineer withSpirent Federal Systems. He supports customers in theGPS/GNSS/Inertial simulation arena in identifying andspecifying test equipment for their navigation systems.Paul holds a BSc(Hons) Degree in Information Technologyfrom Leicester Polytechnic (now known as De MontfortUniversity in the UK). Paul has been working with GPSand GPS Test equipment for 23 years.
Abstract
The on orbit diagnostic test of GPS space vehiclenumber (SVN) 49 showed that the transmitted signalproduces anomalous pseudorange measurements. Thisanomaly is due to leakage of the L1/L2 navigation signalsthrough the antenna array power divider, reflection of thosesignals off the L5 bandpass filter and broadcast of thedelayed reflection through the transmit antenna. The useof the L5 payload was intended to reserve the spectrumwith the International Telecommunication Union (ITU).However, the L1/L2 signals are reflected even when the L5payload is turned off. The SVN49 simulation presentedin this paper was developed with the use of a commercialsimulator and data measured both in an anechoic chamberand on the ground from the live satellite. The model wasfurther refined to include the precisely measured delay as
a result of a cooperative test program with the GermanAerospace Center (DLR). A theoretical Braasch multipathmodel of the physical phenomenon causing the signalanomaly is also presented in this paper. By shaping thegain and phase of a single delayed multipath signal as afunction of elevation angle, the effects of the anomaly ata static receiver location can be satisfactorily simulated.The methodology used circumvents the need to modifythe transmit antenna gain and phase patterns for individualGPS satellites. Two scenarios have been developed that canbe used to calibrate the pseudorange errors and determinethe operational impact for a receiver under test. The firstcalibration scenario uses only SVN49 and a control satelliteto characterize the pseudorange errors over the entire rangeof elevations in 45 minutes while eliminating the effects ofcross-correlation interference. The second is an operationalscenario which utilizes a full constellation with SVN49crossing one quadrant of the sky from zenith to the horizon.The results from both scenarios are shown to be consistentwith the Braasch theoretical model and with live on orbitdata obtained using an identical test receiver.
I Introduction
The GPS IIR-20(M) spacecraft, also designated SpaceVehicle Number (SVN) 49, was successfully launched onMarch 24, 2009. The satellite was assigned to broadcastPRN 1, replacing the GPS IIA-27 satellite launched inSeptember 1996. The spacecraft was intended to occupyPlane B, Slot 2 of the GPS constellation. SVN49 carriedan additional demonstration payload to broadcast the newcivilian L5 frequency in order to reserve this spectrumwith the International Telecommunication Union (ITU).The decision was made to retrofit a GPS IIR-M satellitewith the separate L5 payload in order to meet a deadlineto broadcast on L5 before the summer of 2009. The L5demonstration payload uses a spare port to transmit through

the satellite antenna’s elements. The spare port, also knownas the J2 port, is combined with legacy L1/L2 signalsconnected at the J1 port through an input coupler. PreviousGPS IIR-M missions successfully used the J2 port withoutincident.
On April 9, 2009, 2SOPS engineers and engineers fromThe Aerospace Corporation observed large out-of-familypseudorange residuals from monitor stations. The rootcause of the anomalous pseudorange residuals was foundafter completion of a thorough fault tree analysis. It wasdetermined that the errors in the pseudorange residualswere caused by leakage of the L1/L2 navigation signalsthrough the input coupler of the antenna power divider,reflection of the leaked signals off the bandpass filter of theL5 demonstration payload, and subsequent rebroadcastingof the delayed reflection through the satellite antennaelements. To a GPS receiver, the reflected signal appearsas a fixed delay multipath signal that is shaped by thesatellite antenna’s gain and phase pattern. This results inan elevation dependant pseudorange error that is repeatableevery satellite pass.
The GPS Directorate requested that a scenario bedeveloped to simulate the effects of the pseudorangeanomaly. This scenario is to be used by GPS receivermanufacturers and users to assess the impact of settingSVN49 to healthy and incorporating it into the GPSconstellation. This paper describes the development ofa theoretical multipath model using Braasch’s equationsto predict the pseudorange residual errors due to theanomalous signal. This paper also describes a method tosimulate the anomalous signal using a GPS constellationsimulator. Two static scenarios were developed for aSpirent GPS constellation simulator. The first calibrationscenario is used to measure the pseudorange errordue to the anamoly for a particular receiver. Thesecond operational scenario is used to determine totalposition error under simulated live conditions. Thescenarios incorporate the precise delay of the refllectedsignal measured during a cooperative test program withthe German Aerospace Center (DLR). Test results arepresented for both scenarios using a GPS receiver withwide correlator spacing connected to the RF output ofa Spirent simulator. Comparison of the results with thetheoretical model and live data shows excellent agreement.
II GPS Satellite Antenna Array and AntennaElectronics
The GPS space vehicle (SV) antenna array consists oftwelve powered elements arranged in two concentric ringsas shown in Figure 1. The elements in a ring are poweredequally, with four elements in the inner ring and eight
Fig. 1. Geometry of GPS SV antenna array elements showingarrangement of inner and outer rings.
Outer Ring Inner Ring
L5 Filter 162 In. Cable
Leaked Signal
Reflected SignalPrimary Signal
o42.75
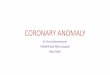
Fig. 2. Schematic of the GPS SV power divider with inputcoupler showing path of reflected signal.
elements in the outer ring. The amount of power distributedto either ring varies depending on whether the J1 or J2 portis used. The power delivered to both rings is controlledby the input coupler of the power divider as shown inFigure 2. A signal injected into the J1 port has 79% of itspower transmitted from the inner ring and 21% of its powerdiverted to the outer ring. Conversely, a signal injectedinto the J2 port would have 21% and 79% of its powertransmitted by the inner and outer rings respectively.
The power is divided between the two rings in order toshape the beam pattern of the radiated signal. Figure 3shows the beam pattern of the inner and outer rings as afunction of boresight angle. Also plotted is the combinedpower from both rings for a signal injected into the J1 port.Figure 4 depicts the geometry of the transmitted signal

Fig. 3. Inner, outer, and composite J1 antenna gain patterns.
6371 km
Earth
25,788 km
20,187 km
SV
13.84◦
Fig. 4. Earth limb and typical satellite coverage pattern.
from the satellite to the Earth showing that the boresightangle to Earth’s limb is 13.84 degrees. The increase incombined power in Figure 3 near 14 degrees is to offsetpower losses caused by the longer propagation path to theEarth limb due to Earth curvature. By contrast, signalsinjected into the J2 port are transmitted with a highlydirectional beam pattern. Figures 5(a) and 5(b) showthe gain patterns measured by Lockheed Martin anechoicchamber tests for signals injected into the J1 and J2 portsfor both the L1 and L2 frequencies. For these plots, theboresight angle has been converted into the elevation anglefor a user viewing the satellite from the Earth’s surface.
III Theoretical Anomaly Analysis
The SVN49 anomaly manifests as a delayedretransmission of the L1/L2 signals through the J2port. An anomaly investigation team determined that thisspurious signal is caused by leakage of the L1/L2 signalthrough the power divider input coupler onto the J2 inputline which is subsequently reflected off the L5 bandpassfilter and back into the J2 port due to an impedancemismatch. The delay between the primary and reflectedL1/L2 signals has been estimated with high confidence bya variety of methods, including analyzing the cable lengthto the L5 payload, processing live data from Cold Bay,Alaska using NovAtel’s Vision Correlation processing, andhigh fidelity visualizing of the GPS code chip shape using
L1
L1
(a) L1 Measurements
(b) L2 Measurements
Fig. 5. GPS SV antenna gain patterns measured at for signalsinserted into J1 and J2 ports.
a 30-meter deep space antenna which was directly alongthe ground path of SVN49 and is operated by DLR inWeilheim, Germany. The final value used for the anomalysimulation was 38 ns.
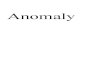
The primary and reflected signals from SVN49 arereceived by terrestrial receivers simultaneously, andcombine to cause a multipath-like error in the measuredpseudorange which repeats every satellite pass. Figure 6shows the deformation of the correlation function dueto an in-phase multipath signal. As shown in this plot,the primary and reflected signals combine to form acomposite signal which is no longer symmetric. MostGPS receivers use a standard Delay Lock Loop (DLL)incorporating an early-minus-late discriminator. Thepseudorange measurement error due to the presence ofmultipath is equal to the difference between the locationof the true correlation peak and the peak location calculatedby the DLL. The correlation function for the primary signal

−1.5 −1 −0.5 0 0.5 1 1.50
0.2
0.4
0.6
0.8
1
1.2
1.4
Code Offset [chips]
Cor
rela
tion
PrimaryReflectionCombinationD
δ
Fig. 6. Distorted correlation function formed by combining thecorrelation functions of the primary and reflected signals.
is described by the equation
CP (τ) =
1− τ 0 ≤ τ < 11 + τ −1 < τ < 00 |τ | ≥ 1,
(1)
and the correlation function of the reflected signal isdescribed by
CR(τ) =
α(1− τ + δ) δ ≤ τ < 1 + δ
α(1 + τ − δ) −1 + δ < τ < δ
0 |τ − δ| ≥ 1,(2)
where τ is the code correlation offset, δ is the delay ofthe reflection with respect to the primary signal, and α isa scaling factor that is dependent on the relative gain andcarrier phase between the primary and reflected signals.The terms τ and δ are measured in units of code chips.The output of the early and late correlation taps can then becomputed by
E = CP (−D
2+ τE) + CR(
−D
2+ τE) (3)
L = CP (D
2+ τE) + CR(
D
2+ τE), (4)
where D is the chip spacing between the early and latecorrelation taps and τE is the code offset error due tomultipath. The terms D and τE are measured in code chips.For this analysis, only discriminator chip spacings of lessthan a code chip are investigated. First, the case when thelate correlator tap lies to the right of the reflected signal’scorrelation peak is considered. The early and late correlatormeasurements become
E = (1− D
2+ τE) + α(1− D
2+ τE − δ) and (5)
L = (1− D
2− τE) + α(1− D
2− τE + δ) (6)
forD
2+ τE > δ (7)
The DLL attempts to find the correlation peak by steeringthe code offset of the correlation taps so that the outputof the early correlator tap equals the output of the latecorrelator tap. For a symmetric correlation function, thisresults in the prompt correlator tracking the correlationpeak. Due to the asymmetry of the correlation functionwhen multipath is present, the prompt correlator is offsetfrom the true correlation peak location by the code offseterror. The code offset error translates directly into an errorin the measured pseudorange according to
ρE =τEc
fchip, (8)
where c is the speed of light, and fchip is the chipping rate.Setting the early and late correlation functions equal allowsthe code offset error to be computed.
(¢1−¢¢¢D2
+ τE) + α(¢1−¢¢¢D2
+ τE − δ) =
(¢1−¢¢¢D2− τE) + α(¢1−
¢¢¢D2− τE + δ)
2τE + 2α(τE − δ) = 0
τE =αδ
α + 1(9)
Plugging in the solution for the code phase offset andrewriting the inequality from equation (7) in terms of onlyD and δ gives the valid range for the equation above.
D
2+
αδ
α + 1> δ
(α + 1)D2
> δ (10)
The case when the late correlator tap lies to the left ofthe peak in the reflected signal’s correlation function isconsidered next. In this case, a narrow correlator spacingis assumed so that the early correlator tap is also affectedby the reflected signal’s correlation function. For this case,the early and late correlator measurements become
E = (1− D
2+ τE) + α(1− D
2+ τE − δ) and (11)
L = (1− D
2− τE) + α(1 +
D
2+ τE − δ) (12)
forD
2+ τE < δ and
−D
2+ τE > −1 + δ.
(13)
Again set the early and late correlation functions equal, andsolve for τE to get
2τE − 2αD
2= 0
τE =αD
2(14)

Plugging the solution for τE into the inequalities inequation (13) and rearranging gives the valid range for thisequation as
D
2+
αD
2< δ and
−D
2+
αD
2> −1 + δ
(α + 1)D2
< δ and 1 +(α− 1)D
2> δ. (15)
The preceding equations are summarized by thefollowing multipath equation described by Braasch. [1]
τE =
αδ
α + 10 ≤ δ ≤ D
2 (α + 1)
αD
2D2 (α + 1) ≤ δ ≤ (
1 + D2 [α− 1]
).
(16)
The reflection that causes the SVN49 anomaly differsfrom a typical multipath reflection only in that the delayof the anomalous reflection is constant at all elevations.Otherwise, the equations above are perfectly valid formodeling the SVN49 reflection. An analysis of the SVN49anomaly must also take into account the change in therelative gain and carrier phase between the primary andreflected signals. These quantities vary as a function ofthe boresight angle. Fortunately, the relative gain andcarrier phase between the primary and reflected signalsvary repeatably as a function of the elevation angle on everysatellite pass. The equation for the scaling factor, α, whichis used in the Braasch equation is written in terms of therelative gain and carrier phase by
α = 10G/20 cos θ (17)
where G and θ are the relative gain and carrier phase ofthe reflected signal with respect to the primary signal. Theanechoic chamber testing performed by Lockheed Martinmeasured the gain and phase patterns of the GPS antennaand electronics by injecting signals of equal power into theJ1 and J2 port. The power that is leaked from the primarysignal through the input coupler of the power divider isfixed. Once the leaked power is measured at one elevationfrom the live satellite, it can be used with the anechoicchamber data to compute the relative gain at any elevation.Similarly, the carrier phase difference between the primaryand leaked signals before transmission is also fixed. Therelative gain and carrier phase between the primary andreflected signal can then be computed as a function ofelevation by applying the fixed gain and phase offsets to theraw anechoic chamber data. The corrected gain and carrierphase data for the L1 and L2 frequencies are summarized inTable I. Figures 7(a) and 7(b) plot the data for both L1 andL2 as a function of elevation angle. The data shows that thesmallest relative power difference between the primary andreflected signals occurs at zenith where the differential is
TABLE I. Relative gain and carrier phase of the reflected signalwith respect to the primary signal.
Relative Relative Relative RelativeElevation Gain Phase Gain Phase
(deg) L1 (dB) L1 (deg) L2 (dB) L2 (deg)0.0 -34.03 -192.41 -39.00 58.83
19.44 -35.06 -189.36 -42.22 88.2929.27 -36.90 -180.81 -41.80 143.3736.79 -39.69 -158.80 -36.82 178.9443.05 -40.62 -108.28 -32.49 195.5148.67 -35.87 -65.56 -29.01 206.7853.81 -30.95 -45.89 -26.32 216.0758.80 -26.87 -33.16 -24.17 224.7163.54 -23.61 -22.38 -22.52 232.8667.97 -21.00 -11.83 -21.29 240.2672.37 -19.01 -1.39 -20.40 246.6776.61 -17.63 8.01 -19.81 251.7880.83 -16.75 15.67 -19.44 255.5084.98 -16.25 20.79 -19.23 257.7089.08 -16.05 23.04 -19.18 258.37
(a) Relative gain
(b) Relative carrier phase
Fig. 7. Plot of relative gain and carrier phase of the reflectedsignal with respect to the primary signal as a function ofelevation angle.

Fig. 8. Theoretical pseudorange error for SVN49 as a function ofelevation.
16 dB for L1. This in turn causes the largest pseudorangeerrors to occur at zenith.
Theoretical estimates of the pseudorange error due to theSVN49 anomaly can be computed by plugging the relativegain and phase data from Table I into equations (8), (16),and (17). The theoretical pseudorange error is plottedversus elevation angle in Figure 8 for a constant delayof 38 ns between the primary and reflected signal and acorrelator spacing of one chip.
IV Methodology for Simulating the SVN49 AnomalyScenario
The previous section provides all the informationnecessary to simulate the SVN49 anomaly in an operationalenvironment using a modern GPS satellite constellationsimulator. The most general approach is to directlysimulate the transmission of the reflected signal using theactual antenna transmission pattern for signals inserted intothe J2 port. This pattern is created by interpolating the gainand phase data as a function of elevation or boresight anglefrom Table I. Depending on the capabilities of the GPSsimulator, this signal can be simulated either as fixed delaymultipath or by introducing a fictitious satellite collocatedwith SVN49 transmitting a second delayed PRN 1 signal.To use one of these approaches, a GPS constellationsimulator must have the capability to either create gain andphase patterns for the multipath signal or to directly modifythe antenna gain patterns of individual satellites.
The authors of this paper simulated the SVN49 anomalyusing various Spirent GPS constellation simulators. TheSpirent simulator consists of an RF signal generator boxwhich is controlled by a PC running Spirent SimGENsoftware. The SimGEN software defines the scenario
under test including the start time, the location of theuser for which the signal is being simulated, the orbitalparameters for the GPS satellites, and other information.SimGEN defines a master antenna pattern for all theGPS satellites, but does not currently have the capabilityto modify antenna patterns for individual satellites. Aworkaround was developed by the authors to imitatethe effects of transmitting through a different antennatransmission pattern by varying the gain and phase of thereflected signal as a function of mission time. This wasaccomplished using the undocumented User CommandData (.ucd) file feature of SimGEN. For a given scenario,the elevation angle to SVN49 at the simulated user locationcan be precomputed as a function of time, then convertedto gain and phase using Table I. It was determined thatchanging gain and phase every one degree of elevationchange provides sufficient resolution in the pseudorangeerror plots.
The SVN49 operational scenario used to generate thesimulated pseudorange error plots at the end of thispaper was programmed specifically for Spirent simulators.This scenario contains a fixed delay multipath signal thattransmits the PRN 1 signal with a delay of 38 ns. Theuser’s location was defined to be stationary and on theground path of the SVN49 satellite. The scenario startsten minutes prior to SVN49 reaching its zenith to give thereceiver under test time to acquire all the satellites anddownload a complete almanac. The User Command Datafile contains the commands to change the gain and phaseof the multipath reflection at specific times from the startof the mission corresponding to one degree decrements inelevation to SVN49. Note that the User Command Data filecreated for this scenario is only valid if the scenario startsat the predefined time with a static user in the predefinedlocation. To aid in the repeatability of the scenario, theerror models for both ionosphere and troposphere havebeen disabled.
The operational scenario described above is used todetermine what impact the SVN49 reflection has onposition error for a receiver under test. This scenario alsocontains a control satellite collocated with SVN49 thatcan be activated to transmit the PRN 30 ranging signal.This control satellite does not have an associated reflection;therefore, pseudoranges computed to it are free of error. Acrude estimate of the pseudorange error versus elevationangle can be computed by subtracting the receiver’scomputed pseudorange to the control satellite from thecomputed pseudorange to SVN49. However, because thecontrol satellite is collocated with SVN49, the measuredDoppler frequencies are identical for both satellites causinga cross-correlation error. This cross-correlation errormanifests as a constant 0.6 meter offset in pseudorangeerror when using PRN 30 as the control satellite. This

offset can be corrected during post-processing. Whensimulating a live satellite environment, ensure that thecontrol satellite is disabled, otherwise the effects of thiscross-correlation error will corrupt the results.
A benefit of using the workaround to simulate theSVN49 anomaly is that the User Command Data file can bemodified to perform faster calibrations of the pseudorangeerror for a given receiver. This is achieved by puttingSVN49 in a stationary geosynchronous orbit directly overthe stationary user. The User Command Data file is thenused to command the gain and phase as before, but at arate of change corresponding to one degree of elevationper thirty seconds. This allows the entire path of thesatellite from zenith to horizon to be simulated in only45 minutes compared to the operational scenario whichtakes more than three and a half hours. The gain andphase of the control satellite can remain constant becausethe gain and phase data in Table I are relative to thatprimary signal. The thirty second period for gain and phasechanges is to account for the time constant of the receiver’ssmoothing filters on the pseudorange estimates. Note thatfor the receiver used in these tests, the time constant of thesmoothing filter had to be manually reduced to ten seconds.Ensure that any pseudorange smoothing on the receiverunder test is either disabled or does not interfere withthe measurements. A control satellite is also collocatedwith SVN49 in geosynchronous orbit, and the remainingsatellites in the constellation are not simulated. The controlsatellite transmits the PRN 30 ranging signal. To eliminatethe cross-correlation error seen in the previous scenario, afictitious Doppler error of 1000 meters per second is addedto the control signal. By mismatching the frequencies ofthe two ranging signals, their codes no longer interfere witheach other. The Doppler error is removed when the receiverdata is post-processed. The reflection on SVN49 is disabledduring the first ten minutes of the scenario to acquire thesignal, download the complete almanac, and provide abaseline when no reflection is present that corresponds tozero pseudorange error. This is followed by five minuteswith the reflection turned on, then held with constant gainand phase corresponding to satellite being at zenith. Thisallows for any oscillations in the receiver tracking loopsdue to the introduction of the reflected signal to die out.Finally, the scenario steps through the remaining gain andphase commands, decrementing one degree of elevation perthirty seconds as described previously.
The recorded receiver data from the calibration scenariomust be post-processed to generate the pseudorange errorplots shown in the results section. Because only twosatellites are simulated, the receiver cannot compute anavigation solution. In particular the receiver cannot solvefor the current GPS time to update its clock. This causesa bias and drift in the receiver clock with respect to the
simulator clock. If the receiver under test has a referenceclock input, then a reference clock could be used to driveboth the Spirent and receiver eliminated most of theseerrors. Otherwise, these errors are removed during post-processing, in addition to removing the fictitious Dopplerthat was introduced. Post-processing to compute thepseudorange error proceeds according to the followingalgorithm
a ≡ slope of (θ1 − θ30) vs. time,θcorr,30(t) = − (θ30 + at) ,
ρerr(t) = ρ1(t)− c
fcarrθcorr,30(t) + b, (18)
where θ1 is the measured carrier phase for SVN49, θ30
and θcorr,30 are respectively the measured and correctedcarrier phase for the control satellite, ρ1 is the measuredpseudorange for SVN49, b is a constant bias correction,fcarr is the carrier frequency, and c is the speed of light.The first equation above can be performed using anysoftware which can compute a linear fit to the data. Thisstep removes both the fictitious Doppler and the unknowndrift between the receiver clock and the Spirent simulatorclock. The bias b is used to shift the data so that thepseudorange error during the baseline period when thereflection was disabled will lie on the zero axis. Thisremoves the large clock bias between the receiver andsimulator clock. This post-processing is repeated for boththe L1 and L2 frequencies when a dual frequency receiveris used.
V Comparison of Simulation Results to Live Data
The results from the scenarios described in the previoussection are compared to live data captured by groundstations lying along the ground path of SVN49. Figure 9shows live L1/L2 pseudorange errors for a Novatelreceiver collected at the WAAS reference station in ColdBay, Alaska on July 14-16, 2009. This receiver usesa standard early-minus-late discriminator with narrowcorrelator spacing. The data was shifted such that the errorat the horizon is zero meters. At the time, it was not knownat what elevation the pseudorange error should be zero. Thedata is overplotted by results from SPAWAR using theirAGNS simulator to simulate the SVN49 anomaly usinga two reflection model. Figures 10 and 11 show the L1and L2 pseudorange errors for live data collected using theGerman Aerospace Center’s (DLR) 30-meter dish antennain Weilheim, Germany. During a planned operation toshift SVN49 to a new slot in the GPS constellation, theground track drifted such that SVN49 made a zenith passover the dish on April 15, 2010. During a campaign fromApril 8-19, 2010, SVN49 could be tracked at this locationwith maximum elevations greater than 89o. The red linecorresponding to data collected from a Novatel receiver

Fig. 9. Live L1/L2 pseudorange error data recorded at the ColdBay, AK WAAS reference station from July 14-16, 2009overplotted by SPAWAR AGNS simulation results.
Fig. 10. Live L1 pseudorange error data recorded by DLR 30-meter dish antenna in Weilheim, Germany on April 15, 2010.
using a standard early-minus-late discriminator with theearly and late correlator separated by one chip most closelyrepresents the receiver used by The Aerospace Corporationto perform these tests. During both ground tests, theNovatel receivers used semi-codeless tracking to obtain L2P(Y) pseudorange data. The previously plotted theoreticalpseudorange errors closely match the plots of pseudorangeerror observed from live data.
The remaining plots show results obtained by feedingthe signal from a Spirent GPS simulator running theoperational and calibration scenarios described in thispaper into a commercial GPS receiver with wide correlatorspacing. This receiver was loaded with firmware thatforces the receiver to use a standard early-minus-late
Fig. 11. Live L2 pseudorange error data recorded by DLR 30-meter dish antenna in Weilheim, Germany on April 15, 2010.
discriminator with a correlator spacing of one chip. TheL2 results were computed by performing semi-codelesstracking of an encrypted P(Y) signal. If the simulator isset to output unencrypted P-code, the receiver can alsotrack that directly. Figure 12 shows the L1/L2 resultsfrom the operational scenario. The spikes in pseudorangeerror corresponded to periods when the Doppler of SVN49is identical to that of another satellite causing a cross-correlation error. The steps in the pseudorange errorcorrespond to times when satellites enter or leave the fieldof view causing an instantaneous jump in the least squaresnavigation solution due to a change in the geometry. Thesespikes and steps are repeatable during subsequent runs ofthe operational scenario. Data below five degrees elevationdrops out because an elevation mask of five degrees wasused by the receiver. Figure 13 shows the L1/L2 resultsfrom the calibration scenario after post-processing thereceiver data as described in the previous section. Thisfigure actually shows results from two runs overplottedshowing that the calibration scenario is repeatable andeliminates the cross-correlation interference and jumps dueto constellation changes that were seen in the operationalscenario. The baseline period when pseudorange erroris zero lies outside the axis of the plot and cannot beseen. This baseline period is simply used for properalignment and can be hidden. The results from boththe operational and calibration scenarios show excellentagreement to the theoretical estimates and to the live data.The calibration scenario should be used to quickly map thepseudorange error due to the SVN49 anomaly as a functionof elevation when a nonstandard discriminator is used orto evaluate various mitigation techniques. The operationalscenario should be used with the control satellite disabledto determine the impact on total position error.

0 10 20 30 40 50 60 70 80 90
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Elevation (deg)
Pse
udor
ange
Err
or [m
]
SV49 L1 and L2 Operational Pseudorange Error
L1L2
Fig. 12. Pseudorange error data simulated using theSVN49 operational scenario on a Spirent GPS constellationsimulator.
0 10 20 30 40 50 60 70 80 90
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Elevation (deg)
Pse
udor
ange
Err
or [m
]
SV49 L1 and L2 Pseudorange Error
L1L2
Fig. 13. Overplot of pseudorange error data for two runssimulated using the SVN49 calibration scenario on a SpirentGPS constellation simulator.
VI Conclusion
This paper provides the methodology and raw dataneeded to model the SVN49 anomaly on any modernGPS constellation simulator. The Braasch multipathequation used to generate the theoretical pseudorange errorestimates was presented. A general method for modelingthe anomaly using any GPS constellation simulator wasdescribed. Two specific scenarios were developed andsimulated on Spirent GPS constellation simulators foroperational testing and calibration. The results from thesimulated scenarios were shown to agree with both thetheoretical model and live data recorded at two separateground stations. The operational scenario is used tostudy the impact on position error due to the SVN49anomaly while the calibration scenario is used to quicklymap pseudorange error versus elevation angle withoutinterference from the other satellites in the constellation.
The scenarios described in this paper are only valid at thepredefined time for a static user in the predefined location.A method to automate the process of pregenerating a UserCommand Data file for a general trajectory is currentlybeing developed. Given the mission time and the trajectoryfile for a particular scenario, the script would compute thetimes when elevation angle changes occur and append theappropriate commands to change gain and phase to theUser Command Data file.
The scenarios used to produce the simulateddata in this paper were codeveloped by SpirentFederal Systems and The Aerospace Corporation.The scenarios are being provided free of charge athttp://www.spirentfederal.com/GPS/SVN_49/.The scenarios are provided with no warranty or technicalsupport from the authors and their respective employers.
VII Acknowledgements
The authors and The Aerospace Corporation gratefullyacknowledge the colleagues and organizations thatcontributed toward the completion of this work. We givespecial appreciation to Tom Stansell for his guidance andcontributions towards creating the initial scenarios, to PatFenton for his simulation suggetions, and to SPAWAR andDLR for providing the facilities and the data used in thisreport.
References
[1] Michael S. Braasch and Michael F. DiBenedetto,“Spread-spectrum ranging multipath modelvalidation,” IEEE Transactions on Aerospaceand Electronic Systems, vol. 37, pp. 298–304, Jan.2001.
[2] Michael S. Braasch, “Multipath effects,” in GlobalPositioning System: Theory and Applications - Volume1, Bradford W. Parkinson and James J. Spilker Jr., Eds.,pp. 547–568. AIAA, 1996.
[3] Andre Hauschild, Oliver Montenbruck, Stefan Tholert,Stefan Erker, Michael Meurer, and Javad Ashjaee,“A multi-technique approach for characterizing theSVN 49 signal anomaly - Part 1: Receiver trackingand IQ constellation,” GPS Solutions, 2011, DOI10.1007/s10291-011-0203-2.
[4] Swen Ericson, “SVN49 (PRN-1) simulation resultsfrom SPAWAR 10-13 August 2009,” Aug. 2009.