Embed Size (px)
Citation preview

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 1
MEEN 617 Handout #12 The FEM in Vibrations
A brief introduction to the finite element method for modeling of mechanical structures
The finite element method (FEM) is a piecewise application of a variational method.
Here I provide you with a fundamental introduction to the FE method congruent with prior analysis of mechanical systems and the assumed modes method. For a complete and most lucid introduction to the FEM please read Reddy, J.N., “Introduction to the Finite Element Method,” John Wiley Pubs. The beauty of the FEM method lies on its simplicity since its formulation is independent of the actual response of the system. That is, little knowledge about an expected answer is required a-priori. Let’s review the Assumed Modes Method.
In any mechanical system, the Hamiltonian
2
1
0t
extt
T V W dt
(1)
is the fundamental principle of mechanics from which the laws of motion are derived, i.e., Newton’s Laws and/or Lagrangian Mechanics.
In general, the kinetic energy (T) and the strain energy (V) of a mechanical system are functions of the displacement vector ( ) and its time derivatives, i.e.,

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 2
, ,materialproperties
, ,materialproperties
T T v v
V V v v
(2)
where ( · ) = d/dt and v= i + j + kx y zv v v
is the vector of displacements
of a material point in the domain of interest Ω= Ω(xi)
X1
X2
X3
vv
Domain
(Xi)
Fig 1. Domain for analysis
In the assumed modes method an approximation to the displacement function in a continuous system is expressed as
( )1
tj
n
ii xi
v
(3)
where each ψi(Ω) describes a deflected shape over the entire domain. Eq. (3) is a linear combination of the basis functions set ψi(Ω)
As shown in past lectures, substitution of Eq. (3) into Eq. (1) leads to an N-DOF mathematical model of the mechanical system, whose equations of motion are:

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 3
M v + K v = Q (4) where M = MT and K = KT are the N x N matrices of mass and stiffness coefficients, respectively, and Q is the vector of generalized forces.
The coefficients in M and K are determined from relations of the shape functions and its derivatives. For example: For an elastic bar subjected to axial motions:
0
0
,
L
ij ji i j
L
jiij ji
M M A dx
ddK K E A dx
dx dx
(5.a)
while, for an elastic beam under transverse or lateral deformations,
0
22
2 2
0
,
L
ij ji i j
L
jiij ji
M M A dx
ddK K E I dx
dx dx
(5.b)
Above, the set of shape functions
1,2,..i i = N must satisfy be an
admissible set (which means): * i must be a linearly independent set,
* satisfy the essential boundary conditions, * be sufficiently differentiable as required by the strain energy function.
u
,A
v
,E,I

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 4
However, there are a number of problems associated with these
requirements: a) a complex system geometry requires of complex shape functions,
i.e., a difficult task for the inexperienced user; b) i are defined over the entire domain () and thus, they lead to
a highly coupled system of equations; c) i are related to a particular problem; and consequently, not
general.
The FEM overcomes these difficulties and provides a sound basis for the analysis of vibrations of mechanical systems.
The FEM can be envisioned in the present context as an application of the assumed modes method wherein the shape functions i represent deflection over just a portion (finite element) of the
structure, with the elements being assembled to form the structural system.

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 5
A FE model for axial deformations of an elastic bar Figure 2 shows an elastic bar (one fixed end) subjected to axial loads
(P, f)(t) that cause axial displacements or elastic deformations u(x,t).
u(x,t),A
x
L
f P=AE du/dx
Fig 2. Elastic bar under axial displacements
The first step in the FEM is to divide the domain Ω into a series of finite elements Ωe and then constructing a finite element mesh, as shown in Fig. 3.
h1 he hN
1 e N
1 2 e-1 e e+1 e+2 eN eN+1
element length
node or joint
Fig 3. Discretization of bar into N finite elements

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 6
Derivation of EOM for one finite element A typical element Ωe = (xA, xB) is isolated from the mesh.
xA
he
e
=xB-xA
xx x=x-xAx=x-xA
Figure 4 depicts a free body diagram of the element, where 1
eu and
2eu are the (nodal) axial displacements at the tips of the element, and
1eP and 2
eP are the (node) axial forces arising from the reactions with the neighboring elements. Note f represents a distributed force/unit length acting on the bar.
Fig 4. Free body diagram for a finite element in axial bar
1eu
2eu
2eP1
ePe
xx ,A
1
0
2
;
e
e
x
e
x h
uP E A
x
uP E A
x
f Distributed force/length
The nodal axial forces P are
1 2
0
;e
e e
x x h
u uP E A P E A
x x

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 7
The kinetic energy (Te) and potential (strain) energy (Ve) for the finite element Ωe are:
2
0
2
0
1,
2
1
2
e
e
h
e
h
e
uT A dx
t
uV E A dx
x
(6)
and the virtual work from the external forces over the element is
( ) 1 ( ) 2
0
e
A B
h
e e e e e eext x xxW f u dx u P u P (7)
The Hamiltonian Principle applies over the whole system; and hence, it also holds over the element (Ωe); thus
2
1
0ext
te e e
tT V W dt
(8)
In Ωe = (xA, xB) , let the displacement ue be represented as
2
( ),1
x
e e ei i tx t
i
u u
(9)
where 1 2, ,,A B
e e e ex t x tu u u u are the nodal displacements and 1
e and
2e are shape functions admissible to the problem. Note that one
presumes to know 1 2,e eu u .

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 8
Substitution of Eq. (9) into Eq. (6) gives:
2 2 2 2
1 1 1 1
1 1,
2 2e e e e e e e e
ij i j ij i j
i j i j
T M u u V K u u
(11)
where the coefficients of the element mass and element stiffness matrices are:
0
0
,e
ij ji i j
e
ji
ij ji
h
e e e e e e
h eee e e e
M M A dx
ddK K E A dx
dx dx
(12)
The shape functions in Eq. (9)
2
( ) 1 1 2 2,1
x
e e e e e e ei i tx t
i
u u u u
must
satisfy: At or 0,Ax x x
( 0) ( 0 )(0, ) 1 1 1 2 2 ,
x x
e e e e e etu u u u
( 0) ( 0 )1 21, 0
x x
e e
(13a)
At or ,B ex x x h
( ) ( )( , ) 1 1 1 2 2e x h x he e
e e e e e eh tu u u u
( ) ( )1 20, 1
x h x he e
e e
(13b)

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 9
Note that from Eq. (12), the shape functions need to be at least once
differentiable over the element Ωe, i.e., 1
1,..C e
i
e
i n
.
Note n > 2 in Eq. (9) is also a choice. However, higher order elements are not discussed here for brevity. Work now with the virtual work performed by the external forces. Substitution of Eq. (9) into Eq. (7) leads to:
(0 ) ( )1 1 1 2 2 2
0
e
he
h
e e e e e e e e eext i ixW f dx u u P u P
1 1 2 2e e e e e e e
ext i iW F u u P u P (14)
Since (0) ( )1 21
he
e e . Above 0
eh
e ei ixF f dx
is a vector of
distributed forces, and recall that 1 2
0
;e
e e
x x h
u uP E A P E A
x x
are
the nodal reaction axial forces.
Substitution of Eqs. (11, 14) into the Hamiltonian Principle in Eq. (8) leads to the system of equations for ONE element:
1 1
n ne e e e e eij j ij j i i
j j
M u K u F P
(15a)
or in matrix form
e e e e eM u + K u = F + P (15b)

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 10
From Eqs. (13) the shape functions
1,2
ei i =
must satisfy the essential
boundary conditions
0
0
1 1
2 1
1, 0;
0, 1
x x he
x x he
e e
e e
and 1
1,2C 0,e
i ei = h
Select, 1 21 ;e e
e e
x x
h h
(16)
1
x
1 x
e 2 x
e
0x ex h
Fig 5. Shape functions for a finite element in axial bar Note that a) ψ1 and ψ2 are linear combinations of the linearly independent complete set 1, x . In addition, 1 2 1e e , the shape functions are a
partition of unity (This means the shape functions 1,2
ei i =
are able to
model rigid body displacements). b) the set
1,2
ei i =
is different from zero only on Ωe and elsewhere is
zero. This quality is called a local support and it is extremely important

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 11
to make the global M and K matrices banded, i.e., with a small number of non-zero values.
The derivation of the shape (or interpolation) functions 1,2
ei i =
does not
depend on the problem. The functions do depend on the type of element (geometry, number of nodes or joints, and the number of primary unknowns).
Substitution of the shape functions, Eq. (16), into the element mass and stiffness matrices gives:
2 1 1 1 1
; ;1 2 1 1 16 2
e e e e e e e
e
A h A E f h
h
e e eM K F (17)
for a bar with uniform cross sectional area (Ae) and material properties (ρ, E)e within the element. Note that Ke is a singular matrix.
The next step constructs (in the computer) the matrices (Me, Ke)e=1,2,..Ne for each element in the domain of interest. Next, one performs the interconnection or assembly of the element EOMs. For the sake of discussion, suppose the domain Ω = (0, L) is divided into 3 elements of possibly unequal lengths, as shown below
P
h1 h3
1 321 2 3 4
h2
Global nodes

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 12
Define the global displacements U=U1, U2, U3, U4
1 2 3 4
U1 U2 U3 U4
Global displacements
while the (local) nodal displacements in each element (e) are:
1 2 3 4 element displacements1 32
11u
1 22 1u u 2 3
2 1u u 32u
The elements are connected at global nodes (2) and (3); since the
displacement U needs to be continuous (i.e., without cracks, fractures, etc.). Then, the interelement continuity conditions are
11 1
1 22 2 1
2 33 2 1
34 2
,
,
,
U u
U u u
U u u
U u
(18)
A BOOLEAN or CONNECTIVITY ARRAY (B) states the correspondence between local nodes in an element and the global nodes. Bij the global node number corresponding to the j-th node of element i
i = 1,2 . . . .Ne: number elements on mesh. j = 1,2 . . . .Nn: number of nodes per element.

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 13
Presently,
12
23
34
B
Repetition of a number in B indicates that the coefficients of Ke and Me associated with the node number will add.
In a computer implementation of the FE scheme, the connectivity array is used extensively for the automatic assembly of the global system of equations. For the three elements in the example, the element Eqns. (17) are written in global coordinates or nodes as:
e=1:
1 111 1 1
1 122 2 21
313
44
2 1 0 0 1 1 0 0
1 2 0 0 1 1 0 0
0 0 0 0 0 0 0 06 0 0
0 0 0 0 0 0 0 0 0 0
UU F P
UU F PAh AEUhU
UU
e=2: 11
2 22 1 122
2 23 2 223
44
0 0 0 0 0 0 0 0 0 0
0 2 1 0 0 1 1 0
0 1 2 0 0 1 1 06
0 0 0 0 0 0 0 0 0 0
UU
U F PUAh AEU F PhU
UU
e=3: 11
2233 3
3 1 1233 3
4 2 24
0 00 0 0 0 0 0 0 0
0 00 0 0 0 0 0 0 0
0 0 2 1 0 0 1 16
0 0 1 2 0 0 1 1
UU
UUAh AEU F PhU
U F PU

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 14
The global EOMS for the whole system are obtained by superposition (addition) of the equations above:
M U K U F + P 1 11 1
1 2 1 22 1 2 12 3 2 3
2 1 2 13 3
2 2
F P
F F P P
F F P P
F P
(18)
where
1 1;e eN Ne e e eM M K K (19)
are the global matrices of mass and stiffness coefficients, and
1 1;e eN Ne e e eF f P P (20)
are the vectors of distributed forces and nodal forces, respectively. Note above K is singular since the boundary condition (fixed end at x=0, i.e. U1=0) is yet to be applied. Imposition of boundary conditions In general, due to continuity (action=reaction), at the internal nodes
1 2 2 32 1 2 10, 0P P P P
Or 1 2 2 32 1 2 2 1 3,P P Q P P Q , 3
2 4P Q (21) with Q2, Q3 and Q4 as specified nodal (axial) forces acting on the bar.
Incidentally, U1=0 is specified, while the wall reaction force 11 ?P is
an unknown.

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 15
In general, let
a
d
UU =
U, where Ua is a vector containing the active
DOF (degrees of freedom) and Ud are the specified (time invariant) DOF. Then, the global equations of motion are partitioned as
aa ad aa ad a aa
da dd da dd d dd
M M K K U SU+ =
M M K K U SU
(22)
where , ad da da adM M K K . Sa =F+Q is a vector of (known) applied forces (distributed and nodal) and Sd is a vector of unknown reaction forces (to be calculated) Since dU 0 , expand Eqs. (22) as
aa a aa a ad d a
da a da a dd d d
M U K U K U S
M U K U K U S
Solve for Ua from the first equation above, aa a aa a a ad dM U K U S K U (23) and next, find the internal forces Sd from the 2nd Equation d da a da a dd dS M U K U K U (24) For the elastic bar, the system of eqns. (23) is tridiagonal and thus, its solution can be obtained quickly without a matrix inversion. Note that the essential BCs is a specified U1 = 0 while the reaction force P1
1 is unknown. Hence, the final EOMS are:

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 16
2,2 2,3 2,4 2 2,2 2,3 2,4 2
2,3 3,3 3,4 3 2,3 3,3 3,4 3
4,2 3,4 4,4 4 4,2 3,4 4,4 4 ( )
0
0
t
M M M U K K K U
M M M U K K K U
M M M U K K K U P
(25)
and once the equation above is solved,
11,2 2 1,2 2 1,3 3 1,3 3 1,4 4 1,4 4 1M U K U M U K U M U K U P (26)
In the example configuration, the satisfaction of the essential constant
U1 = 0 removes the singularity of the stiffness matrix (i.e., removes the rigid body mode). For the example case, considering elements of equal length, he = L/3 , the equations of motion are:
2 2
3 3
4 4 ( )
4 1 0 2 1 0 03
1 4 1 1 2 1 018
0 1 2 0 1 2 t
U UAL AE
U UL
U U P
(27)

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 17
Use MODAL ANALYSIS to solve
M U K U F (28)
+Initial Conditions To this end, first solve the homogeneous EOMs
M U K U 0 2 ii K M 0 (29)
and make the modal matrix, 1 2 .....N (30)
where N is the active degrees of freedom in the system. Using the modal transformation ( ) ( )t t U , the physical EOMS
become in modal coordinates:
m m mM K Q (31)
where ;T T m mM M K K , and TmQ F (32) are the modal mass and stiffness matrices (diagonal) and the modal force vector, respectively. By now, you do know how to solve the uncoupled set of N ODES and then return to physical coordinates.

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 18
Examples – How good is a FE model ? Recall the EOM for one-element
e e e e eM U K U F (a1)
where 1 2 1 2;T T
U U F F e eU F (a2)
and
2 1 1 1,
1 2 1 16
AL AE
L
e eM K (a3)
with L as the bar length with cross-section A and material properties (,E).
Bar with one end fixed: Let’s find its fundamental nat. frequency
Set 1 2 1 20 ; ? 0T T
U U F F e eU F
EOM (a1) reduces to
1
2 2
0 02 1 1 1
1 2 1 1 06
FAL AEU UL
Or 2 2 03
AL AEU U
L
Then
1/2
1_3
FEME
L
and
1/2
1 (exact)2
E
L
HD14
The ratio of natural frequencies FEM/exact = 1.102

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 19
Bar with two free ends: Find its fundamental elastic mode natural frequency
Set 1 2 1 2; 0 0T T
U U F F e eU F
EOM (a1) reduces to
11
22
2 1 1 1 0
1 2 1 1 06
UUAL AEULU
Process 2DOF equation above to obtain
1/2
1_ 2 _12
0,FEM FEME
L
1/2
1 20, (exact)E
L
Handout 14
The ratio of elastic mode nat. frequencies FEM/exact= 1.102
ONE FE model delivers close predictions for the elastic natural frequencies.
A question to ponder: Why does the FE model produces LARGER natural frequencies than the exact (analytical) ones?

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 20
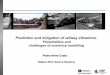
A FE model for bending of elastic beams Figure 6 depicts an elastic cantilever beam with lateral forces (F) and
moments (M) acting on it that produce the beam lateral deflection or bending v(x,t). Fo and Mo are a lateral force and moment applied at the end of the beam (x=L), and f(x) is a distributed force/unit length. The beam has material density () and elastic modulus (E) and geometric properties of area (A) and area moment of inertia (I).
v(x,t),E,I
x
L
f
Fo
Fig 6. Elastic beam under lateral (bending) displacements
Mo
f
For a finite element (e) or piece of the beam with width h, note the sign convention:
f
he element length
M2
M1 V2
V1
Fig 7. Notation for shear forces (V) and moments (M)
Let V and M denote the shear force and bending moment. For an Euler-type beam

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 21
2
2;
v MM E I V
x x
(33)
In the FEM, discretize the beam () into a collection of finite elements
e e , as shown below in Fig. 8.
h1he hN
1 e N
1 2 e-1 e e+1 e+2 eN eN+1
element length
node or joint
Fig 8. Discretization of beam into N finite elements
Let v and vx be the lateral displacement and beam rotation
(primary and secondary variables). Fig. 9 shows a free body diagram in the element Ωe, with 1e e ex x h ,

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 22
element length
Fig 9. Free body diagram for a finite element in a elastic beam
1eV
3eV
4eQe
f
f: Distributed force/length
2e1
e
1eQ
2eQ
3eQ
,E,I
Lateral forces and moments
Displacement V and rotation
xe xe+1
The shear forces at the ends of the element
1
3 1
1
2
( ) 2
2
( ) 2
;e
e
e
e
ex
x
ex
x
vQ V E I
x x
vQ V E I
x x
(34)
And the bending moments at the ends are
1
1
2
2 ( ) 2
264 ( ) 2
e
e
e
e
ex
x
x
x
vQ M E I
x
vQ M E I
x
(35)

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 23
Let
1
1 21
1 3, ,
2 4, ,
;
;
e e
e e
e ex t x t
e e e ex t x t
V v V v
V V
(36)
ex x x
xxx=0x=0 x=hex=he
xe
1eV 3
eV
4 2e eV
2 1e eV
Assume that the beam lateral displacement and rotation (angle) in e are given by the approximation
( )
( )
4
( , )
1
4
( , )
1
tx
x
t
e e ex t i i
i
eie e
x t i
i
v V
dV
dx
(37)
From a prior discussion on the assumed modes method, the elements
of the mass and stiffness matrices for e are
0
22
2 2
0
,e
ij ji i j
e
ji
ij ji
h
e e e e e e
h eee e e e
M M A dx
ddK K E I dx
dx dx
(38)

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 24
Note that 2
1,..4i
e e
iC
. The shape functions satisfy the essential
boundary conditions,
(0) (0) ( 0) (0)
( ) ( ) ( ) ( )1
1 1 2 3 4,
3 3 1 3 4,
1; 0
1; 0
e
h h h he e e e e
e e e e ex t
e e e e ex t
v V
v V
(39a)
2 1 3 4(0) (0) (0) (0)
4 1 2 3( ) ( ) ( ) ( )
1
2,
3,
1; 0
1; 0
e e e e
e
e e e eh h h he e e e
e
d d d dedx dx dx dxx t
d d d dedx dx dx dxx t
V
v V
(39b)
The lowest order polynomial that satisfies the conditions above is third order (and is twice differentiable) , i.e.,
2 3
0 1 2 3,
2
1 2 3, 2 3
12 3
x te e e
x te e e
x x xv c c c c
h h h
x xc c c
h h h
(40)
Leading to the following conditions,
11 0 2 1
3 0 1 2 3
31 24 2
0 : ,
: ,
32
e e
e
ee
e
e e e
cx V c V
h
x h V c c c c
cc cV
h h h
(41)
Solving the set of four Eqs. (41) gives

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 25
0 0.2 0.4 0.6 0.8 10.5
0.2
0.1
0.4
0.7
1
1234
1 x( )
2 x( )
3 x( )
4 x( )
x
2 3
1
2
2
2 3
3
2
4
1 3 2
1
3 2
1
e
e e
e
e
e
e e
e
e e
x x
h h
xx
h
x x
h h
x x
h h
(42)
Figure 10 depicts the shape functions. Note that 1 2 3 4 1e e e e
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
1 x( )
x
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
3 x( )
x
0 0.2 0.4 0.6 0.8 10
0.04
0.08
0.12
0.16
0.2
2 x( )
x0 0.2 0.4 0.6 0.8 1
0.2
0.16
0.12
0.08
0.04
0
4 x( )
x Fig 10. Shape functions for structural element under bending.

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 26
Substitution of Eq. (42) into Eq. (38), renders the following element mass and stiffness matrices.
2 2
2 2
156 22 54 13
22 4 13 2
54 13 156 22420
13 2 22 4
e e
Te e e ee
e e
e e e e
h h
h h h hAhh h
h h h h
e eM M (43)
2 2
3
2 2
12 6 12 6
6 4 6 2
12 6 12 6
6 2 6 4
e e
e eTe e e e
e e e
e e e e
h h
h h h hE I
h h h
h h h h
e eK K (44)
and the vector of generalized forces Fi
e is:
,,0
e
x t
he
i ix tF f dx (45)
Assuming a constant distributed force f(x,t) over the element, obtain:
2 21 1 1 12 12 2 12
T
e e e e e e e ef h f h f h f heF (45b)
and the constraint nodal forces are obtained from the virtual work performed:
1 1 3 3 2 2 4 4e e e e e e e eW Q V Q V Q V Q V (46)
Hence, 1 2 3 4
Te e e eQ Q Q Q eQ (46b)
Then, the system of equations for the element e are:

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 27
4 4
1 1
e e e e e eij j ij j i i
j j
M V K V F Q
(47)
or ee e e e eM V + K V = F + Q (47)
where 1 2 3 4
Te e e eV V V VeV
Assembly of the element matrices to produce the global system of equations is easily done as exemplified before. Be careful to keep continuity of the displacements at the nodes (joints) and also the continuity of constraint forces at the nodes.
The global system of equations becomes
M V + K V = F + Q (48)
where the global vector of displacements is
1 2 1 3 4 2, , , ,........... ,T
N N NV V V V V V V (49)
with N as the global number of nodes);
1 1;e eN Ne e e eM M K K (50)
are the global matrices of mass and stiffness coefficients, and
1 1;e eN Ne e e eF f Q Q (51)
are the vectors of distributed forces and nodal forces, respectively. Note above K is singular since the boundary conditions are yet to be applied.

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 28
The global FEM vector of forces Q will in general have zero components at the internal nodes. The elements of this vector are of the form, see Fig. 11:
1 13 1 1 4 2;e e e e
k kQ Q Q Q Q Q (52)
Here k denotes the global node number.
Fig 11. Balance of forces at a node
11eV
3eV
4eQe
2e 1
1e
11eQ 1
2eQ 3
eQ
xe+1
e+1
=
=
The eqns. above constitute a statement of equilibrium of forces at the nodal interface (boundary) of an element. Recall from Eqns. (34, 35) that
3 1
1 1
2 21
2 20
e e
e e
x x
v vQ Q E I E I
x x x x
1 1
2 21
4 2 2 20
e e
e e
x x
v vQ Q E I E I
x x
If no external forces or moments are applied at the node, then

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 29
13 1
11 4 2
0,
0
e ek
e ek
Q Q Q
Q Q Q
(53)
However, if an external nodal shear force or moment is applied at the joint, then the components of the force vector Q will not be zero.
Consider, for example, the case of a support spring with stiffness ks connecting the beam to ground, i.e.,
13 1 0;e e
springQ Q F
1 13 1 1e e e
k spring sQ Q Q F k V (54)
Fig 12. Balance of forces at a node with a spring connection
11eV
3eV
11e
s springk V F
e
2e 1
1e
11eQ 1
2eQ 3
eQ
xe+1
e+1
=
=
e e+1
ks
11eV
Note that this spring restoring force depends on the element lateral deflection, and therefore, it is unknown. Hence, one needs to modify the global stiffness matrix and add the contribution of the support stiffness ks..

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 30
Coordinate transformation of element matrices: A plane elastic frame element combines the elastic properties of a
bar and a beam; and hence, it has three displacement coordinates at each end (two orthogonal displacements and one rotation). As shown in Figure 13, this element has a local coordinate system (x,y) where the x-coordinate aligns with the major axis (length) of the bar-beam.
e1U
6U
2U
3U
4U
5U
X
x
y
Fig 13. Arbitrary frame element and displacements
The x-axis is tilted angle relative to a global (inertial) coordinate system (X, Y) to which all elements in the structure will be related. In the (X,Y) coordinate system, the displacements are defined as shown in Fig. 14.

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 31
e
1U
6U
2U3U
4U
5U
X
x
y
Fig 14. Arbitrary frame element and displacements in (X,Y) axes
Y
The transformation between the local displacements 1,2...6
ei i
V
in the
(X,Y) to the displacements 1,2...6
ei i
V
in the local coordinate system
(x,y) is given by the (coordinate transformation) equation
e eeV = T V (55)
where cos sin 0 0 0 0
sin cos 0 0 0 0
0 0 1 0 0 0
0 0 0 cos sin 0
0 0 0 sin cos 0
0 0 0 0 0 1
eT
(56)
The element EOMs in the (x,y) coordinate system are
ee e e e eM V + K V = F + Q (57)

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 32
Substitution of (Eq. 55) into (57) and pre-multiplying by Te
T gives the following:
T e e T e e T e T ee e e e e eT M T V + T K T V = T F + T Q (58)
Let: , , , e T e e T e e T e e T ee e e e e eM T M T K T K T F T F Q T Q (59)
and write the EOM as: e e e e e eM V + K V = F + Q (60) Note that the resulting mass and stiffness matrices are still symmetric. The assembly of the element matrices proceeds in the usual way to obtain the global system of equations. Constraints and reduction of degrees of freedom: Thus far, the analysis takes all generalized displacements as independent of each other. The assumption lead to the global system of equations:
M V + K V = F + Q (61)
Frequently, there arises a need to specify relationships amongst system displacement coordinates. This is equivalent to specifying N
displacements which are linearly independent and the rest 1 2 N + , N + , . . . .N
depend on the N
displacements.
The discussion presently relates to a constraint equation of the form:
1 21 2 1, ,... , ,... 0 ,....,i N i i NN N N Nf V V V g V V V (62)
The equation above can be written in matrix form as:
ada dd
d
VR V = R R = 0
V (63)

MEEN 617 HD 12 Introduction to FEM in Vibrations © 2013 Dr. L. San Andrés 33
where Vd is the vector of Nd dependent coordinates or displacements, and Va is the vector of aN N
= Na independent or ACTIVE
coordinates or displacements. Note d a dN + = + = NN N N
.
From eq. (63) da a dd dR V R V 0 find
-1d da a dd da aV = T V = -R R V (64)
where Tda is the (Nd x Na) matrix transformation between active to dependent degrees of freedom. Now, the total global displacement vector can be written as:
a a
a aa
d da
V IV = V TV
V T (65)
where Iaa is a (Na x Na) unit matrix.
Substitution of (64) into the EOM (61) and pre-multiplying by TT gives:
T T T Ta aT M TV + T K TV = T F + T Q
or
a a a a a aM V + K V = F + Q (66)
where the mass and stiffness matrices are reduced to (Na x Na) active DOF. Note that,
, , ,T T T T a a a aM T MT K T K T F T F Q T Q (67) The system of equations (66) accounts only for the active degrees of freedom Na.

2 L420
4 L
2
3 L2
3 L2
4 L2
2
4
E Ip
L3
4 L2
2 L2
2 L2
4 L2
2
4
0
0
=
the natural frequencies can be determined by the eigenvalue analysis ORIGIN 1
2 I M1
K 0=
M1
K =420
L
1
7 L4
4 L2
3 L2
3 L2
4 L2
E Ip
L3
4 L2
2 L2
2 L2
4 L2
1320
L4
E Ip
1200
L4
E Ip
1200
L4
E Ip
1320
L4
E Ip
A1320
1200
1200
1320
sort eigenvals A( )( )i 1 2
i
i
10.954
50.2
110.954
L2
E Ip
=
1
12 2
L2
E Ip
=
error10.954 2
2100
exact first natural frequencyerror 10.987 %
EXAMPLE: Using ONE finite element determine the first natural frequency for the beam configurations (pin-pin ends, fixed end-free end, fixed end-fixed end) and compare the results with avialable closed form formulae. Show the percentage error. The beam has length L, cross sectional area A, inertia Ip and elastic modulus E.
LSA
ME617
The generalized mass and stiffness matrices for beam bending are:
displacement &slope (left end)
displacement & slope (right end)
Me L420
156
22 L
54
13 L
22 L
4 L2
13 L
3 L2
54
13 L
156
22 L
13 L
3 L2
22 L
4 L2
= KeE I
L3
12
6 L
12
6 L
6 L
4 L2
6 L
2 L2
12
6 L
12
6 L
6 L
2 L2
6 L
4 L2
=
1
2
3
4
Pin-Pin Ends: No displacement and moment at each end
set boundary conditions:
1
0 3
0 Moment1
0 Moment2
0
2 L420
156
22 L
54
13 L
22 L
4 L2
13 L
3 L2
54
13 L
156
22 L
13 L
3 L2
22 L
4 L2
1
2
3
4
E Ip
L3
12
6 L
12
6 L
6 L
4 L2
6 L
2 L2
12
6 L
12
6 L
6 L
2 L2
6 L
4 L2
1
2
3
4
Force1
Moment1
Force2
Moment2
=
2 L420
156
22 L
54
13 L
22 L
4 L2
13 L
3 L2
54
13 L
156
22 L
13 L
3 L2
22 L
4 L2
0
2
0
4
E Ip
L3
12
6 L
12
6 L
6 L
4 L2
6 L
2 L2
12
6 L
12
6 L
6 L
2 L2
6 L
4 L2
0
2
0
4
Force1
0
Force2
0
=
which reduces to a 2 by 2 system of equations for free vibration

%error 0.483error3.533 1.875104
2
1.8751042
100
1.8751042
3.516
1
1.8751042
L2
E Ip
=
exact first natural frequency
1
3.533
L2
E Ip
=
3.533
34.807
i
i
sort eigenvals A( )( )
i 1 2
A252
2016
192
1476
420
L1
140 L2
4 L2
22 L
22 L
156
E I
L3
12
6 L
6 L
4 L2
252
L4
E I
2016
L5
E I
192
L3
E I
1476
L4
E I
M
1K
2 I M1
K 0=
Now the natural frequencies can be determined by the eigenvalue analysis
2 L420
156
22 L
22 L
4 L2
3
4
E Ip
L3
12
6 L
6 L
4 L2
3
4
0
0
=
which reduces to a 2 by 2 system of equations for free vibration
2 L420
156
22 L
54
13 L
22 L
4 L2
13 L
3 L2
54
13 L
156
22 L
13 L
3 L2
22 L
4 L2
0
0
3
4
E Ip
L3
12
6 L
12
6 L
6 L
4 L2
6 L
2 L2
12
6 L
12
6 L
6 L
2 L2
6 L
4 L2
0
0
3
4
Force1
Moment1
0
0
=
2 L420
156
22 L
54
13 L
22 L
4 L2
13 L
3 L2
54
13 L
156
22 L
13 L
3 L2
22 L
4 L2
1
2
3
4
E Ip
L3
12
6 L
12
6 L
6 L
4 L2
6 L
2 L2
12
6 L
12
6 L
6 L
2 L2
6 L
4 L2
1
2
3
4
Force1
Moment1
Force2
Moment2
=
Moment2
0Force2
02
01
0
set boundary conditions:
Fixed end-Free end: zero displacement and slope at the fixed end, and zero shear and moment at the free end.
_________________________________________________________________________________________________________

%error 1.621error
22.736 4.7300412
4.7300412
100
exact first natural frequency1
4.7300412
Lo 2
E Ip
=
1
22.736
Lo 2
E Ip
=
420 12 2
4
Lo 4
156
E Ip=Now the natural frequency is
2 L420
156 3
E Ip
L3
12 3
0=
which reduces to just one equation for free vibration of the deflection at midspan
2 L420
156
22 L
54
13 L
22 L
4 L2
13 L
3 L2
54
13 L
156
22 L
13 L
3 L2
22 L
4 L2
0
0
3
0
E Ip
L3
12
6 L
12
6 L
6 L
4 L2
6 L
2 L2
12
6 L
12
6 L
6 L
2 L2
6 L
4 L2
0
0
3
0
Force1
Moment1
0
Moment2
=
2 L420
156
22 L
54
13 L
22 L
4 L2
13 L
3 L2
54
13 L
156
22 L
13 L
3 L2
22 L
4 L2
1
2
3
4
E Ip
L3
12
6 L
12
6 L
6 L
4 L2
6 L
2 L2
12
6 L
12
6 L
6 L
2 L2
6 L
4 L2
1
2
3
4
Force1
Moment1
Force2
Moment2
=
Force2
04
02
01
0
set boundary conditions:L
Lo
2=
where Lo is the original length of the beam
Fixed End - Fixed End: Reduce beam into two parts, each of length L/2. The boundaty conditions become zero displacement and slope at the fixed end, and zero slope at the other end of the 1/2 beam.
_________________________________________________________________________________________________________






![Contact in small slips with X-FEM - Code_AsterFinite Element Method (X-FEM) [bib1]. One considers the continuous hybrid formulation of problems of contact between solids [bib2] and](https://img.pdfslide.us/doc/110x75/5edc6f83ad6a402d66671773/contact-in-small-slips-with-x-fem-codeaster-finite-element-method-x-fem-bib1.jpg)