Embed Size (px)
Citation preview

MECHANICAL MATHEMATICAL MODELS DESCRIBING THE DYNAMIC BEHAVIOR OF VEHICLE WITH ARM SUSPENSION
Assoc. prof. PhD Eng. Kunchev L ., M. Eng. Pavlov N.
Technical University – Sofia, Bulgaria
Abstract: In this paper dynamic behavior of different types of suspensions for a car are investigated. For describing the mechanical system is used mathematical model based on vector-matrix algebra. The results for the all types of suspensions are compared.
Keywords: MATHEMATICAL MODELS, VIBRATIONS, NATURAL FREQUENCIES, RIDE COMFORT
1. Introduction The aim of this work is to present an approach through which to
formalize the process of searching the system differential equations describing the dynamic behavior of cars with different kind of suspension and different number and method of disposal of the masses over suspended. Formalization of the design process based on mathematical modeling allows you to automate finding the matrices of mass, elasticity and Damping of mechanical-mathematical model of the car.
In the paper is considered mechanical-mathematical models of cars with different schemes of suspension. Scheme of the model are shown in Figures 1 to 6. The models take into account the kinematics of the levers mechanisms in different types of suspension. This allows for more accurate description of the dynamic behavior compared to models in which non suspended masses are presented like the masses with only vertical movement.
The scheme shown in Fig. 1 is a car with front transverse arms and rear longitudinal arms. Longitudinal position of the arms was taken back almost all modern cars from small and medium-sized front-wheel drive and independent rear suspension. This allows a flat floor of the car, on the other hand between the suspension arms can be embed the fuel tank and spare wheel. When working with longitudinal suspension arms, wheels move parallel to one another. When driving in a road with a curve, the wheels slope with angle equal to the slope of the car body. This reduces the forces of adhesion between the road surface end wheels.
The scheme in Fig. 2 is a transverse-arm in the suspension and both axles of the vehicle. Rear suspension lateral arms is mainly used in cars with rear-wheel drive and four-wheel drive, but can be seen on cars with front-wheel drive. It has the following advantages:
- Little change the track of the car and stable linear motion, even on the road with bumps;
- Opportunity for greater lateral forces when the car moved in the curves;
- Small amount of lowering the mass center after loading the car.
Fig. Scheme 3 shows a car with front transverse-arm suspension and rear suspension dependent rigid beam, which are jointed left and right wheel. Moving the left ore right wheel of one dependent suspension movement causes the other. The dependant suspension They lead to an increase in non suspended masses, but have advantages such as constant ground clearance and high reliability.
The models shown in Fig. 4. and Fig. 5 are designed of the suspension as model of Fig. 1. Here is taken account the influence of the mass power unit (engine and gearbox) (Fig. 4) and the masses of seats end passengers on them (Fig.5).
On Fig. 6 is shown front and rear axles of the vehicle with transverse-arm suspension for both axes (as Fig. 2), with additional influences of the rubber-metal shock absorbers in the arms.
The systems looked above are composed of suspended masses and non suspended masses. In the systems of Fig. 4 and 5 are included the masses over suspended (additional) masses. The
suspended masses incorporate the masses of the car body, passengers and cargo. In the mass center the suspended masses attached local coordinate system O0x0y0z0. Non suspended masses include the wheels, beam of Fig. 3, differential axles and connecting elements in an element that is attached to the sprung masses.
Each of these elements is fixed local coordinate system, respectively O1x1y1z1, O2x2y2z2, O3x3y3z3, O4x4y4z4. Masses over suspended include the mass of the power unit (Fig. 4) and tables and seating passengers on them (Fig. 5). They are fixed local coordinate systems Odxdydzd, Od1xd1yd1zd1, Od2xd2yd2zd2, Od3xd3yd3zd3. In the equilibrium condition of the system all the axes of coordinate systems are parallel. All movements of local coordinate systems are calculated after take account to the absolute coordinate system OАxАyАzА.
On the systems from fig. 1 to фиг.6 are applied the next conditions:
- system elements are rigid bodies; - antiroll bar(stabilizer) link are massless and their elasticity is
considered as equivalent springs connected to a lower control arm at a distance Lsf for the front axle end Lsb for the rear axle;
- here takes into account the elastic end damping elements crf, crb, βrf, βrb, , and the elasticity of the front tires cgf and the rear tires cgb;
- here take into account the elastic and damping properties of elastic elements supporting the power unit cde, βde (for Fig. 4);
- here take into account the elastic and damping properties of seats cd, βd (Fig. 5);
-here take into account the elastic properties of the shock absorbers in the arms ct (Fig. 6).
- elastic and damping elements are with linear characterization; - the system is placed in equilibrium by the mass centers of the
wheels resting on a horizontal axis. O1y1 axis coincides with the axis O2y2, and coincides with the axis O3y3 O4y4.
Generalized coordinate systems are:
- z0 - linear displacement of the local coordinate system O0x0y0z0 axis Oz;
- φ0, ψ0 - angular displacement of the local coordinate system O0x0y0z0 respectively around the axes Ox and Oy;
- θ0 - angular rotation of the local coordinate system O0x0y0z0 axis Oz (for Fig. 6);
- φ1 - angular rotation about the axis O1x1 of the coordinate system O1x1y1z1;
- φ2 - angular rotation about the axis O2x2 of the coordinate system O2x2y2z2;
- φ3 - angular rotation about the axis O3x3 of the coordinate system O3x3y3z3 (Fig. 2, 3 and 6);
- φ4 - angular rotation about the axis O4x4 of the coordinate system O4x4y4z4 (Fig. 2 and 6);
- ψ3 - angular rotation about the axis O3y3 of the coordinate system O3x3y3z3 (Fig. 1, 4 and 5);
- ψ4 - angular movement about the axis O4y4 of the coordinate system O4x4y4z4 (Fig. 1, 4 and 5);
57

xA
yA
zA
x1
x0
x2
y1
y2
y0
z1
z0
z2
OA
O2
O1
O0
Lcf
Lmpf
bkf
crf
csf
Lsf
bf
bf
bb
mp
mp
mp
Rkf
cgf
cgf
cgb
cgb
Lf
Lb
bkb
hcf
m0
bf+Lcf
Ag21
H
011'
Ag11
Ag12
qf1
x3
y3
z3
O3
x4
y4
z4
O4
mp
Rkb
csbLsb
hcb
Lkb
Lcb
Lmpb
bb
qb1
qf2
qb2
Brf
Brb
crb
Brf
crf
crbBrb
Fig. 1 Kinematical scheme of a car with front transverse arms and rear longitudinal arms
xA
yA
zA
x1
x3
x4
x0
x2
y1
y2
y3
y4
y0
z1
z0
z3
z4
z2
OA
O2
O1
O4
O3
O0
Lcf
Lmpf
bkf
Lcb
Lmpb
bkb
crb
crb
crf
crf
csf
csb
Lsb
Lsf
bf
bf
bb
bb
mp
mp
mp
mp
Rkf
cgf
cgf
cgb
cgb
Lf
Lb
hcb
hcf
m0
bb+Lcb
bf+Lcf
Ag21
H
011'
Ag11
Ag12
Rkb
q
Brb
Brb
Brf
Brf
Fig. 2 Kinematical scheme of the car with front and rear transverse arms
xA
yA
zA
x1
x0
x2
y1
y2
y0
z1
z0
z2
OA
O2
O1
O4
O0
Lcf
Lmpf
bkf
crb
crb
crf
crf
csf
csb
Lsf
bf
bf
mp
mp
Rkf
cgf
cgf
cgb
cgb
Lf
Lb
hcb
hcf
m0
Lcb
bf+Lcf
Ag21
H
011'
Ag11
Ag12
Rkb
q
x3
y3
O3
z3
mgr
bkb
Brf
Brf
Brb
Brb
Fig. 3 Kinematical scheme of the car with front transverse arms and rear dependent suspension
58

xA
yA
zA
x1
x0
x2
y1
y2
y0
z1
z0
z2
OA
O2
O1
O0
Lcf
Lmpf
bkf
crf
csf
Lsf
bf
bf
bb
mp
mp
mp
Rkf
cgf
cgf
cgb
cgb
Lb
bkb
m0
Ag21
H
011'
Ag11
Ag12
x3
y3
z3
O3
x4
y4
z4
O4
mp
Rkb
csb Lsb
hcb
Lkb
Lcb
Lmpb
bb
Brb
crb
Brf
crf
crbBrb
bd
Brf
Bde
Bde
cde
xd
yd
zd
d
Hd
d
ld
Lf
md
Od
Ld
Fig. 4 Kinematical scheme of the car with front transverse arms and rear longitudinal arms, end suspended power unit on four springs
xA
yA
zA
x1
x0
x2
y1
y2
y0
z1
z0
z2
OA
O2
O1
O0
Lcf
Lmpf
bkf
crf
csf
Lsf
bf
bf
bb
mp
mp
mp
Rkf
cgf
cgf
cgb
cgb
Lf
Lb
bkb
hcf
m0
bf+Lcf
Ag21
H
011'
Ag11
Ag12
q
x3
y3
z3
O3
x4
y4
z4
O4
mp
Rkb
csb Lsb
hcb
Lkb
Lcb
Lmpb
bb
q
q
q
Brf
Brb
crb
Brf
crf
crbBrb
bd1
bd2
bd3
md1
md2
md3
cd1
cd2
cd3
Bd1Ldb
Ldf
Od1
Od2
Od3
Hd1
zd1
zd2
zd3
Fig. 5 Kinematical scheme of the car with front transverse arms and rear longitudinal arms end three additional masses
odresoreni tables.
Lcf
qf1qf2
Lmpf
bf
bkf
mp Y1Z1
H
hcf
Lsf
Y4Z2
Brf Brf crfcrf
m0
mp
z0
y0
z1 z2
y1ct
Lcb
qb1qb2
Lmpb
bb
bkb
mp Y3Z3
H
hcb
Lsb
Y4Z4
Brb Brb crbcrb
m0
mp
z0
y0
z3 z4
y3
ct
Fig. 6 Vehicle's scheme of front and real axles with added shock absorbers
ct
y
y
z
z ct
x
Fig. 7 Rubber shock absorbers
59

- z3- linear displacement of the local coordinate system O3x3y3z3 to absolute OАxАyАzА for axis Oz (Fig. 3);
- zd - linear displacement of the local coordinate system Odxdydzd to absolute OАxАyАzА for axis Oz (Fig. 4);
- φd, ψd - angular rotation of the local coordinate system Odxdydzd to absolute OАxАyАzА respectively around the axes Ox end Oy (Fig. 4);
- zd1, zd2, zd3 - linear displacement of the local coordinate system Od1xd1yd1zd1, Od2xd2yd2zd2 end Od3xd3yd3zd3 for axis Oz (Fig. 5);
- z1, z2, z3, z4 - vertical displacements of the arms at the points of attachment to the body (Fig. 6);
- y1, y2, y3, y4 - horizontal displacements of the arms at the points of attachment to the body (Fig. 6);
Longitudinal elasticity in shock absorbers don’t take account. All displacements are counted against the absolute
coordinate system OАxАyАzА.
List of names: m0 –suspended masses ; mp, mgr- non suspended masses; J0x , J0y , J0z - moment of inertia of the suspended masses in
relation to the axes Ох, Оy, Оz; Jpxf , Jpyf , Jpzf - moments of inertia of the non suspended
masses the front axle in relation to the axes Ох, Оy, Оz; Jpxb, Jpyb, Jpzb - moments of inertia of the non suspended
masses the rear axle in relation to the axes Ох, Оy, Оz; Jgrx, Jgry - moments of inertia of the non suspended masses the
rear axle in relation to the axes Ох, Оy (only for Fig. 3); H - vertical coordinate of center of the non suspended masses
in relation to the arms; bf, bb - horizontal coordinate of mass center of the non
suspended masses to the articulation point of the front and rear arms;
Ldf, Ldb - distance from the mass center to the front axle and the rear axle
bkf , bkb length of the front and rear transverse arms; Lkb length of the longitudinal rear arms (Fig. 1); Lmpf, Lmpb - distance from the mass centers of the front and
rear arms to their articulation point; Lcf , Lcb - distances from the points of attachment of the front
and rear elastic elements to the arms articulation points. For Fig. 3 Lcb is the distance from the point of attachment of the rear elastic element to the longitudinal axis of the vehicle;
Lsf, Lsb - distance from the points of attachment of the front and rear transverse rollbar link to the articulation points;
Rkf, Rkb - radiusis of front and rear wheels; crf, crb - coefficient of elasticity of the front and rear elasticity
elements; cgz - coefficient of elasticity of tires; csf, csb - coefficient of elasticity of the front and rear rollbar
link; βrf, βrb - damping coefficients of front and rear shock
absorbers; md - mass power unit (Fig. 4); Jd - moment of inertia of the power unit along the axes Ox
and Oy (Fig. 4) Hd - vertical coordinate of mass center of the power unit to
the mass center of the suspended masses (Fig. 4); Ld - distance from the mass center of the suspended masses to
the power unit center (Fig. 4); ld, bd - distances from the mass center of the power unit to the
point of attachment on its axes Ox and Oy (Fig. 4); Ldf, Ldb - distances from the mass center of the suspended
masses to the mass centers of the front and rear seats to axel Ох (Fig. 5);
bd1, bd2, bd3 - distances from the longitudinal axis of the vehicle to the mass centers of the seats on the Oy axis (Fig. 5);
Hd1, Hd2, Hd3 - vertical coordinates of mass centers of the seats to the mass center the suspended mass (Fig. 5);
cdе, βde –coefficients of elasticity and damping of the power unit supports (Fig. 4);
cd, βd - coefficients of elasticity and damping of the seat supports (Fig. 5);
ct - coefficient of elasticity of rubber-metal shock absorbers (Fig. 6).
2.Mechanical Mathematical models of arm suspension in various locations and types of arms in the rear axle(Fig. 1, 2 and 3)
In this part is modeled three types of suspension in the rear axle. The consider models are with transverse arms in front axle and the three most common suspension in the rear axle. In the rear axle the type of arms are with longitudinal position, transverse position and suspension-type dependent "whole beam."
2.1.Mechanical mathematical model describing the
dynamic behavior of suspension-type figure. 1., Work [1]. Generalized coordinates for the system are:
{ }
=
4
3
2
1
0
0
0
ψψϕϕψϕz
q }{
=
4
3
2
1
0
0
0
ψψϕϕψϕ
z
q }{
=
4
3
2
1
0
0
0
ψψϕϕψϕ
z
q
(1)
To find the laws of motion in the absolute coordinate system OАxАyАzА is necessary to define the transition matrix of each local coordinate system to the absolute.
- matrix of transition from O0x0y0z0 to OАxАyАzА is:
−−
−
=
1000cos.cossinsin.cos
0cos.sincossin.sin0sin0cos
000000
00000
00
0 zТ А
ψϕϕψϕψϕϕψϕ
ψψ
(2)
- x0 and y0 are zero because it is considered only linear vibration on axis Oz;
- matrix of transition from one coordinate system to O0x0y0z0 can present as:
- matrix of transition from coordinate systems O1x1y1z1, O2x2y2z2, O3x3y3z3, O4x4y4z4, to O0x0y0z0, are:
−−−
=
1000cossin0sincos0001
11
1101 H
bL
T f
f
ϕϕϕϕ
(3)
−−
=
1000cossin0sincos0
001
22
2202 H
bL
T f
f
ϕϕϕϕ
(4)
−−−−
=
1000cos0sin
010sin0cos
33
33
03 H
bL
T b
b
ψψ
ψψ
(5)
−
−−
=
1000cos0sin
010sin0cos
44
44
04 H
bL
T b
b
ψψ
ψψ
(6)
60

- matrix of transition from coordinate system O1x1y1z1 to OАxАyАzА is:
+−−+−++−−−−−−
+−−
==
1000coscossinsincoscoscoscossinsinsincoscoscossinsincos
cossincossinsincoscossinsincossincossincoscossinsinsincoscossinsinsincos
.000000100101001000
00000100101001000
0010100
0101 zHbL
HbLHL
TTTff
ff
f
AA
ψϕϕψϕϕψϕϕϕϕψϕϕϕψϕψϕϕψϕϕψϕϕϕϕψϕϕϕψϕ
ψψϕψϕψψ
(7)
- the transition matrices of coordinate system O2x2y2z2,
O3x3y3z3, O4x4y4z4 to OАxАyАzА, AT2 ,
AT3 , AT4 are similar to
AT1 . The full form of all matrices is presented in [1].
Determination of the radius vectors of mass centers: - radius vector determining mass center of the suspended
mass m0: [ ]Tmo z 1,,0,0 0=ρ (8)
[ ]Tmo z 1,,0,0 0 =ρ (9)
- radius vector determining the mass center of the front right arm mp1:
[ ]Tmpfmp L 1,0,,011 −=ρ (10)
+−−+−−+−−+−
++
==
1coscossinsincossincoscoscossin
cossincossinsinsincossincoscossincossinsin
00000010010
0000010010
0010
1111 zHbLLL
HbLLLHLL
Tffmpfmpf
ffmpfmpf
fmpf
mpAA
mp ψϕϕψϕϕψϕϕϕψϕϕψϕϕψϕϕϕ
ψψϕψ
ρρ
(11)
Working with small angles, for easier calculation is applied sinφ = φ, cosφ = 1. After changing the radius-vector is:
+−−+−−+−−+−
++
=
100010
00010
010
1 zHbLLLHbLLL
HLL
ffmpfmpf
ffmpfmpf
fmpf
Amp ϕψϕϕ
ϕψϕϕϕψϕψ
ρ
(12)
Later on the terms will apply the rules that the magnitudes of higher order will be neglected. The terms like φ.φ sinφ.sinφ etc. don’t takes account.
After differentiation and remove members of a high order is obtained:
−++−=
1)( 1000
0
0
1 ϕψϕϕψ
ρ
mpfffmpf
Amp LLbLz
HH
(13)
- radius - vector determining the mass center of the front left arm mp2 is:
[ ]Tmpfmp L 1,0,,022 =ρ (14)
+−+++++−−
++−
==
1coscossinsincossincoscoscossin
cossincossinsinsincossincoscossincossinsin
00000020020
0000020020
0020
2222 zHbLLL
HbLLLHLL
Tffmpfmpf
ffmpfmpf
fmpf
mpAA
mp ψϕϕψϕϕψϕϕϕψϕϕψϕϕψϕϕϕ
ψψϕψ
ρρ
(15)
Appling the rules for small angles sinφ = φ, cosφ = 1 is obtained:
+−+++++−−
++−
=
100020
00020
020
2 zHbLLLHbLLL
HLL
ffmpfmpf
ffmpfmpf
fmpf
Amp ϕψϕϕ
ϕψϕϕϕψϕψ
ρ
(16)
After differentiation and remove members of a high order is obtained:
++++=
1)( 2000
0
0
2 ϕψϕϕψ
ρ
mpfffmpf
Amp LLbLz
HH
(17)
- radius-vector determining the mass center of the rear right arm mp3 is: [ ]Tmpbmp L 1,0,0,3
3 −=ρ (18)
+−−−−−+−++
+−+−
==
1coscossinsincossincoscoscossincoscossincossinsinsincossincossinsin
sincossinsincoscos
000000300300
00000300300
003030
3333 zHbLLL
HbLLLHLLL
Tbbmpbmpb
bbmpbmpb
bmpbmpb
mpAA
mp ψϕϕψϕψψϕψψϕψϕϕψϕψψϕψψϕ
ψψψψψψ
ρρ
(19)
After take account for angles sinφ = φ, cosφ = 1 is obtained:
+−−−−−+−++
+−+−
=
100030
0003000
030
3 zHbLLLHbLLL
HLLL
bbmpbmpb
bbmpbmpb
bmpbmpb
Amp ϕψψψ
ϕψϕψϕψϕψψψ
ρ
(20)
After differentiation and remove members of a high order is obtained:
−+−−=
1)( 3000
0
0
3 ψψϕϕψ
ρ
mpbbmpbb
Amp LLLbz
HH
(20)
- radius-vector determining the mass center of the rear left arm mp4 is:
[ ]Tmpbmp L 1,0,0,44 −=ρ (21)
+−+−−−++++
+−+−
==
1coscossinsincossincoscoscossincoscossincossinsinsincossincossinsin
sincossinsincoscos
000000400400
00000400400
004040
4444 zHbLLL
HbLLLHLLL
Tbbmpbmpb
bbmpbmpb
bmpbmpb
mpAA
mp ψϕϕψϕψψϕψψϕψϕϕψϕψψϕψψϕ
ψψψψψψ
ρρ
(22)
After take account for angles sinφ = φ, cosφ = 1 is obtained:
+−+−−−++++
+−+−
=
100040
0004000
040
4 zHbLLLHbLLL
HLLL
bbmpbmpb
bbmpbmpb
bmpbmpb
Amp ϕψψψ
ϕψϕψϕψϕψψψ
ρ
(23)
After differentiation and remove members of a high order is obtained:
−+−+=
1)( 4000
0
0
4 ψψϕϕψ
ρ
mpbbmpbb
Amp LLLbz
HH
(24)
If it is take account only linear displacements z, a compilation of the kinetic energy equation using only those components of the radius vectors which refer to the axis Oz.
Determination of the angular velocity of the elements. The components of the angular velocity of the suspended
masses are preset like: 00
ϕω =Ax
00 ψω =Ay (25)
00 =Azω
The angular velocity of the arms where there is relative movement can determine taking account the transition matrices. The angular velocity ωi of the i-th unit to the absolute coordinate system is equal to:
)(00)(000 Tii
Tiii TTTT =−=∗ω (26)
Where ∗0
iω is matrix of the projection of vector ωi to the main coordinate system:
−−
−=∗
00
00
ixiy
ixiz
iyiz
i
ωωωωωω
ω
(27)
To obtain the angular velocity of arms (26) we have to define matrices )(
1TAT , )(
2TAT ,
)(3
TAT , )(4
TAT and their derivatives AT1 , AT2
, AT3 , AT4
. Type of these matrices is presented in [1].
61

After multiplying the matrices and simplify the resulting expressions for the components of angular velocity in three axes are obtained:
0101 cosψϕϕω +=Ax
001001 sinsincos ϕψϕϕψω +=Ay (28)
000011 sincossin ϕψϕψϕω −=Az
After removal of members of a higher order of angular speeds of the front right side is obtained:
101 ϕϕω +=Ax
01 ψω =Ay (29)
01 =Azω
Тhe angular speeds of the other arms are determined as:
- for the front left arm
202 ϕϕω +=Ax
02 ψω =Ay (30)
02 =Azω
- for the rear right arm
03 ϕω =Ax
303 ψψω +=Ay (31)
03 =Azω
- for the rear left arm
04 ϕω =Ax
404 ψψω +=Ay (32)
04 =Azω
Determination of the elastic deformation elements:
Top of the main elastic elements is rigidly fixed to the suspended mass and therefore the study of change in length can be held to coordinate system O0x0y0z0 instead seek to coordinate the absolute coordinate system OАxАyАzА..
- radius vectors the points of joints of the right front spring respect to coordinate system O0x0y0z0 is:
[ ]Tcfcfff hLbL 1,),(,011 +−=′ρ (33)
[ ]TcfL 1,0,,0111 −=′′ρ (34)
−−−−
=
−−−−
=
=
−
−−−
=′′=′′
11sincos
10
0
1000cossin0sincos0001
11
1
11
11111
01
011
HLbL
L
HLbL
L
LHb
L
T
cf
fcf
f
cf
fcf
f
cff
f
ϕϕϕ
ϕϕϕϕ
ρρ
(35)
After removal of members of a higher order and take account that sinφ = φ, cosφ = 1, the change in the length of the elastic element are:
[ ]Tcfcf HLh 0,,0,0 10
110
11 ++=′′−′ ϕρρ (36)
From the radius vector (36) will use a component on axel Oz in the equation of potential energy.
- radius vectors the points of joint of the left front spring respect to coordinate system O0x0y0z0 is:
[ ]Tcfcfff hLbL 1,,,012 +=′ρ (37)
[ ]TcfL 1,0,,0212 =′′ρ (38)
−+
=
−+
=
=
−−
=′′=′′
11sincos
10
0
1000cossin0sincos0
001
22
2
22
22212
02
012
HLbL
L
HLbL
L
LH
bL
T
cf
fcf
f
cf
fcf
f
cff
f
ϕϕϕ
ϕϕϕϕ
ρρ (39)
[ ]Tcfcf HLh 0,,0,0 20
120
12 +−=′′−′ ϕρρ (40)
- radius vectors the points of joints of the right rear spring respect to coordinate system O0x0y0z0 is:
[ ]Tcbbcbb hbLL 1,,),(021 −+−=′ρ (41)
[ ]TcbL 1,0,0,321 −=′′ρ (42)
−−−−−
=
−−−
−−
=
=
−
−−−−
=′′=′′
11sin
cos
100
1000cos0sin
010sin0cos
33
3
33
33
321
03
021
HLb
LL
HLb
LL
L
HbL
T
cb
b
bcb
cb
b
bcb
cb
b
b
ψψ
ψ
ψψ
ψψ
ρρ (43)
[ ]Tcbcb HLh 0,,0,0 30
210
21 ++=′′−′ ψρρ (44)
- radius vectors the points of joints of the left rear spring respect to coordinate system O0x0y0z0 is:
[ ]Tcbbcbb hbLL 1,,),(022 +−=′ρ (45)
[ ]TcbL 1,0,0,422 −=′′ρ (46)
−−
−−
=
−−
−−
=
=
−
−
−−
=′′=′′
11sin
cos
100
1000cos0sin
010sin0cos
44
4
44
44
422
04
022
HLb
LL
HLb
LL
L
HbL
T
cb
b
bcb
cb
b
bcb
cb
b
b
ψψ
ψ
ψψ
ψψ
ρρ (47)
[ ]Tcbcb HLh 0,,0,0 40
220
22 ++=′′−′ ψρρ (48)
- radius vector the contact patch of the front right wheel is: T
kfkfg Rb ]1,,,0[111 −−=ρ (49)
+−−++−−−+−−+++−
+++
==
10001010
0000110
0010
111111 zHbLRRbb
HbLRRbbHLRb
Tffkfkfkfkf
ffkfkfkfkf
fkfkf
gAA
g ϕψϕϕϕϕϕψϕϕϕϕϕ
ψψϕψ
ρρ
(50)
From the radius vector (50) will using a component on axel Oz in the equation of potential energy
100011 )( ϕψϕρ kffkffA
zg bLbbz −++−= (51)
- radius vector of the contact patch of the front left wheel is: T
kfkfg Rb ]1,,,0[212 −=ρ (52)
62

+−+++−+++−++−
+++−
==
10002020
0000220
0020
212212 zHbLRRbb
HbLRRbbHLRb
Tffkfkfkfkf
ffkfkfkfkf
fkfkf
gAA
g ϕψϕϕϕϕϕψϕϕϕϕϕ
ψψϕψ
ρρ
(53)
From the radius vector (53) will using a component on axel Oz in the equation of potential energy
200012 )( ϕψϕρ kffkffA
zg bLbbz ++++= (54)
- radius vector of the contact patch of rear right wheel is: T
kbkbkbg RbL ]1,,,[321 −−−=ρ (55)
+−−−+−−−−+−++−−+
+−+++−
==
100030030
00003003000
00330
321321 zHbLRRbLL
HbLRRbLLHLRRLL
Tbbkbkbkbkbkb
bbkbkbkbkbkb
bkbkbkbkb
gAA
g ϕψψψϕψψϕψϕϕψψϕψϕψϕ
ψψψψψ
ρρ
(56)
After mathematical transformation the component on axel Oz is:
300021 )()( ψψϕρ kbkbbkbbA
zg LLLbbz −+−+−= (57)
- radius vector the contact patch of rear left wheel is: T
kbkbkbg RbL ]1,,,[422 −−=ρ (58)
+−+−+−+−−++++−++
+−+++−
==
100040040
00004004000
00440
422422 zHbLRRbLL
HbLRRbLLHLRRLL
Tbbkbkbkbkbkb
bbkbkbkbkbkb
bkbkbkbkb
gAA
g ϕψψψϕψψϕψϕϕψψϕψϕψϕ
ψψψψψ
ρρ
(59)
After mathematical transformation the component on axel Oz is:
400022 )()( ψψϕρ kbkbbkbbA
zg LLLbbz −+−++= (60)
To find the deformation of the rollbar link should be
determined radius-vectors of the two its joints respect to coordinate system attached to the sprung mass O0x0y0z0.
- radius-vectors the joint points of the front rollbar link is:
The coordinates of the right joint are: T
sfsf L ]1,0,,0[11 −=ρ (61)
−−−−
=
−
−−−
==
1sincos
10
0
1000cossin0sincos0001
1
1
11
1111
01
01 HL
bLL
LHb
L
Tsf
fsf
f
sff
f
sfsf ϕϕ
ϕϕϕϕ
ρρ
(62)
The coordinates of the left joint are: T
sfsf L ]1,0,,0[22 =ρ
−+
=
−−
==
1sincos
10
0
1000cossin0sincos0
001
2
2
22
2222
02
02 HL
bLL
LH
bL
Tsf
fsf
f
sff
f
sfsf ϕϕ
ϕϕϕϕ
ρρ
(63)
The rollbar link deflection respect to Oz is: 21
02
01 ϕϕρρ sfsfsfsf LL −−=− (64)
- radius-vectors the joint points of the rear rollbar link is: - the coordinates of the right side are:
Tsbsb L ]1,0,0,[3
1 −=ρ (65)
−−−
−−
=
−
−−−−
==
1sin
cos
100
1000cos0sin
010sin0cos
3
3
33
33
31
03
01 HL
bLLL
HbL
Tsb
b
bsbsb
b
b
sbsb ψ
ψ
ψψ
ψψ
ρρ
(66)
- the coordinates of the left joint are: T
sbsb L ]1,0,0,[42 −=ρ
−−
−−
=
=
−
−
−−
==
1sin
cos
100
1000cos0sin
010sin0cos
4
4
44
44
42
04
02
HLb
LL
L
HbbL
T
sb
b
sb
sbb
sbsb
ψ
ψ
ψψ
ψψ
ρρ (67)
The rollbar link deflection respect to Oz is: 43
02
01 ψψρρ sbsbsbsb LL +−=− (68)
The kinetic energy of the system is:
24000
23000
22000
21000
20
20
240
230
220
210
200
200
200
))((21
))((21
))((21
))((21
)21(2)
21(2
)(21)(
21)(
21
)(21
21
21
21
ψψϕ
ψψϕ
ϕψϕ
ϕψϕ
ϕψ
ψψψψϕϕ
ϕϕψϕ
mpbbmpbbp
mpbbmpbbp
mpfffmpfp
mpfffmpfp
pxbpyf
pybpybpxf
pxfyx
LLLbzm
LLLbzm
LLbLzm
LLbLzm
JJ
JJJ
JJJzm
−+−++
+−+−−+
++++++
+−++−+
+++
+++++++
+++++=Τ
(69)
Potential energy of the system is:
243
221
224000
213000
222000
211000
24
23
22
21
)(21)(
21
))()((21
))()((21
))((21
))((21)(
21
)(21)(
21)(
21
ψψϕϕ
ψψϕ
ψψϕ
ϕψϕ
ϕψϕψ
ψϕϕ
sbsbsbsfsfsf
bkbkbbkbbgz
bkbkbbkbbgz
fkffkffgz
fkffkffgzcbrb
cbrbcfrfcfrf
LLcLLc
qLLLbbzc
qLLLbbzc
qbLbbzc
qbLbbzcLc
LcLcLc
+−+−−+
+−−+−+++
+−−+−+−+
+−+++++
+−−++−++
++−+=Π
(70)
The function of Relay, taking account only of the damping resistance is:
24
23
22
21 )(
21)(
21)(
21)(
21 ψβψβϕβϕβ cbrbcbrbcfrfcfrf LLLLR ++−+= (71)
After applying the Lagrange equation for the dynamic equation can obtained:
∂∂
−
∂Π∂
−=
∂Τ∂
−
∂Τ∂
qR
qqqdtd
, (72)
for equations describing the laws of motion of the system of Fig. 1:
[ ] [ ] [ ] [ ]FqCqq =+Β+Μ (73)
To analyze how a change in the matrix models with different
suspension and taking into account the additional mass and elastic parameters of rubber-metal vibroizolatori sequentially will be considered the other five models shown in the figure above.
63

[M1] is the inertia matrix that is symmetric about main diagonal with dimension 7x7 and has the following form:
m0+4mp 0 2mpLf-2mp(Lmpb+Lb)
-mpLmpf mpLmpf -mpLmpb -mpLmpb
0
J0x+2Jpxf+ 2Jpxb+
2mpbb2+2mp
(Lmpf+bf)2
0 Jpxf+mpLm
pf (Lmpf+bf)
Jpxf+
mpLmpf
(Lmpf+bf)
mpbbLmp
b -
mpbbLmpb
2mpLf-2mp
(Lmpb+Lb) 0
J0y+2Jpyb+
2Jpyf+2mpLf2
+2mp
(Lmpb+Lb)2
-mpLfLmpf mpLfLmp
f
Jpyb+
mpLmpb
(Lmpb+Lb)
Jpyb+
mpLmpb
(Lmpb+Lb)
-mpLmpf Jpxf+mpLm
pf (Lmpf+bf) -mpLfLmpf
Jpxf+
mpLmpf2
0 0 0
mpLmpf Jpxf+mpLm
pf (Lmpf+bf) mpLfLmpf 0
Jpxf+
mpLmpf2
0 0
-mpLmpb mpbbLmpb Jpyb+mpLmpb
(Lmpb+Lb) 0 0 Jpyb+mp
Lmpb2 0
-mpLmpb -mpbbLmpb Jpyb+mpLmpb
(Lmpb+Lb) 0 0 0 Jpyb+mp
Lmpb2
[C1] is the matrix of elasticity, which is also symmetric and has dimension 7x7:
4cgz 0 2cgzLf -2cgz
(Lb-Lkb) -cgzbkf cgzbkf -cgzLkb -cgzLkb
0 2cgz(bf+bkf
)2+2cgz
(bb+bkb)2 0
cgzbkf
(bf+bkf) cgzbkf
(bf+bkf) cgzLkb
(bb+ bkb)
-cgzLkb
(bb+ bkb)
2cgzLf -2cgz
(Lb+Lkb) 0
2cgzLf2+2cgz
(Lb+Lkb)2 -cgzbkfLf cgzbkfLf
cgzLkb
(Lb+ Lkb)
cgzLkb
(Lb+ Lkb)
-cgzbkf cgzbkf
(bf+bkf) -cgzbkfLf
crfLcf2+
cgzbkf2
+csfLsf2
csfLsf2 0 0
cgzbkf cgzbkf(bf+b
kf) cgzbkfLf csfLsf
2
crfLcf2+
cgzbkf2+
csfLsf2
0 0
-cgzLkb cgzLkb
(bb+ bkb) cgzLkb(Lb+ Lkb)
0 0
crbLcb2+c
gz
Lkb2+
csbLsb2
-csbLsb2
-cgzLkb -cgzLkb
(bb+ bkb) cgzLkb(Lb+ Lkb)
0 0 -csbLsb2
crbLcb2+c
gz
Lkb2+
csbLsb2
64
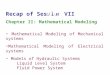
[B1] is the matrix of dissipative forces, showing the influence of dampers - with symmetrical dimensions 7x7:
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 βrf.L2cf 0 0 0
0 0 0 0 βrf.L2cf 0 0
0 0 0 0 0 βrb.L2cb 0
0 0 0 0 0 0 βrb.L2cb
2.2.Mechanical mathematical models describing the
dynamic behavior of suspension-type figure. 2 and 3, [2]. Generalized coordinates and their derivatives of these models
are: - for Fig. 2:
{ }
=
4
3
2
1
0
0
0
ϕϕϕϕψϕz
q
}{
=
4
3
2
1
0
0
0
ϕϕϕϕψϕ
z
q
}{
=
4
3
2
1
0
0
0
ϕϕϕϕψϕ
z
q
(74)
for fig. 3:
{ }
=
3
3
2
1
0
0
0
z
z
q
ϕϕϕψϕ
}{
=
4
3
2
1
0
0
0
z
z
q
ϕϕϕψϕ
}{
=
4
3
2
1
0
0
0
z
z
q
ϕϕϕψϕ
(75)
Transition matrices - the matrix of transition from coordinate system O0x0y0z0 to
OАxАyАzА..For Fig. 2 and 3 is the same as AT0 for Fig. 1
(equation (2)). - the transition matrices of coordinate systems O1x1y1z1 and
O2x2y2z2 to O0x0y0z0 for Fig. 2 and 3 are the same as 01T , 0
2T for Fig. 1 (equations (3) and (4)).
- differences in the transition matrices of coordinate systems O3x3y3z3 and O4x4y4z4 to O0x0y0z0 is obligated to differences in the type of rear suspension:
-for the suspension type Fig. 2 the transition matrices are:
−−−−
=
1000cos0sin
010sin0cos
33
33
03 H
bL
T b
b
ψψ
ψψ (76)
−
−−
=
1000cos0sin
010sin0cos
44
44
04 H
bL
T b
b
ψψ
ψψ , (77)
-for the suspension type Fig. 3 the transition matrices are:
+−−−−
=
1000cossin0sincos0
001
333
3303 zH
bL
T b
b
ϕϕϕϕ , (78)
for the suspension type Fig. 3 no transition matrice T04
Angular velocity
The components of the angular velocity of the suspended masses are preset and are same as the model of Fig. 1 (equation 25).
Angular velocity of the shoulder: - for Fig. 2 differ only rotational speed of the rear shoulders: - rear right side:
303 ϕϕω +=Ax
03 ψω =Ay
(79)
03 =Azω
- rear left side: 404 ϕϕω +=A
x
04 ψω =Ay
(80)
04 =Azω
- for Fig. 3 differ only angular velocity of the beam rear axle: 303 ϕϕω +=A
x
03 ψω =Ay
(81)
03 =Azω
After expression of kinetic and potential energies and function of Relay for both systems apply the Lagrange equation of second kind (72). For the equations describing the laws of motion of the system is in force (73):
[ ] [ ] [ ] [ ]FqCqq =+Β+Μ ,
65

Where: [M1, 2.3] is the inertia matrix, including changes in patterns Fig. 1,2 and 3, which is symmetric about main diagonal with
dimension 7x7 and has the following form: m0+4mp
I, II 0 2mpLf-
2mp(Lmpb+Lb) I -mpLmpf mpL
mpf -mpLmpb
I,II -mpLmpb
I
m0+2.mp
+mgr III
2mpLf-2mpLb II
0 III
mpLmpb II
2.mp.Lf
-mgrLb III
mgr III
-mpLmpb I, J0x+2Jpxf+ 2Jpxb+ 2mpbb
2+2mp (Lmpf+bf)2 I
0 Jpxf+mpLmpf (Lmpf+bf)
Jpxf+
mpLmpf (Lmpf+bf)
mpbbLmpb I
-mpbbLmpb I
0 III
J0x+2Jpxf+ 2Jpxb+2mp (Lmpf+bf)2
+2.mp.
(Lmpb+bb)2
Jpxb+mp.Lmpb.(Lmpb+bb) II
Jpxb+mp.Lmpb.(Lmpb+bb) II
J0x+2Jpx+Jgrx+2.mp.(Lmpf+bf)2 III
Jgrx III
0 III
2mpLf-2mp (Lmpb+Lb) I
0 J0y+2Jpyb+
2Jpyf+2mpLf2
+2mp (Lmpb+Lb)2 I
-mpLfLmpf
mpLfLmpf
Jpyb+
mpLmpb
(Lmpb+Lb) I
Jpyb+
mpLmpb
(Lmpb+Lb) I
2mpLf-
2mp Lb II
J0y+2.Jpyb+2.Jpyf +2.mp.Lf
2+2.mp. Lb2
II
mp.Lb.Lmpb I -mp.Lb.Lmpb
II
2.mp.Lf –
mgr.Lb III
J0y+2.Jpy+Jgry+2.mLf
2+mgr. Lb2 III
0 III
-mgr.Lb III
-mpLmpf
Jpxf+mpLmpf (Lmpf+bf)
-mpLfLmpf Jpxf+
mpLmpf2
0 0 0
mpLmpf Jpxf+mpLmpf (Lmpf+bf)
mpLfLmpf 0 Jpxf+
mpLmpf
2
0 0
-mpLmpb
II mpbbLmpb
I Jpyb+mpLmpb
(Lmpb+Lb) I 0 0 Jpyb+mp Lmp
I 0
0 Jpxb+mp.Lmpb.(Lm
pb+bb) II mp.Lb.Lmpb Jpxb+mp.Lmpb
2 II
Jgrx III
0 I Jgrx III
-mpLmpb I
-mpbbLmpb I
Jpyb+mpLmpb (Lmpb+Lb) I
0 0 0 Jpyb+mp Lmpb2
I
mp.Lmpb II
Jpxb+mp.Lmpb.(Lm
pb+bb) II -mp.Lb.Lmpb Jpxb+mp.Lmpb
2
II
mgr III
0 III
-mgr.Lb I mgr III
- [C1, 2,3] is the matrix of elasticity, taking into account changes in the patterns Fig. 1,2 and 3, which is also symmetric and has dimension 7x7:
4cgz 0
2cgzLf -2cgz
(Lb+Lkb) I -cgzbkf cgzbkf
2.cgz.Lf -2.cgz.Lb II
2.cgz.Lf -2.cgz.Lb III
0
2cgz(bf+bkf)2+2cgz
(bb+bkb)2 I, II 0
cgzbkf
(bf+bkf) cgzbkf (bf+bkf)
2.cgz.(bf+ bkf)2+2.cgz.bkb III
2cgzLf -2cgz
(Lb+Lkb) I 0
2cgzLf2+2cgz
(Lb+Lkb)2 I -cgzbkfLf cgzbkfLf
2.cgz.Lf 2.cgz.Lf2+2.cgz.Lb
2 II
66

-2.cgz.Lb II
2.cgz.Lf
-2.cgz.Lb III 2.cgz.Lf
2+2.cgz.Lb III
-cgzbkf cgzbkf
(bf+bkf) -cgzbkfLf
crfLcf2+
cgzbkf2
+csfLsf2
csfLsf2
cgzbkf cgzbkf(bf+bkf) cgzbkfLf csfLsf 2
crfLcf2+
cgzbkf2+
csfLsf2
-cgzLkb I cgzLkb
(bb+ bkb) I cgzLkb(Lb+ Lkb) I
0 0 -cgzbkb II cgz.bkb.(bb+ bkb) II cgz.bkb.Lb II
0 III 2cgz.bkb2 III 0 III
-cgzLkb I -cgzLkb
(bb+ bkb) I cgzLkb(Lb+ Lkb) I 0 0
- [B1, 2,3] is the matrix of dissipative forces, including changes in patterns Fig. 1,2 and 3 and showing the influence of dampers - with symmetrical dimensions 7x7:
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 βrf.L2cf 0 0 0
0 0 0 0 βrf.L2cf 0 0
0 0 0 0 0 βrb.L2
cb 0 2βrb.Lcb
2 III
0 0 0 0 0 0 βrb.L2
cb
2βrb III
Cells colored in orange (index I) refer to the system of Figure 1, those in blue (index II) of Figure 2 and those in green on Fig. 3 (index III). The white cells without index are common to the three matrix schemes.
3.Mechano-mathematical models of the arm suspension with different location and type of masses over suspended and take into account rubber shock absorbers (Fig. 4, 5 and 6).
3.1. Mechanical mathematical model describing the dynamic behavior of the car for the effect of the power unit (Fig. 4), work [3].
For the basic scheme of the arm suspension is considered the model of Fig. 1. Generalized coordinates and their derivatives for the system of Fig. 4 are:
{ }
=
d
d
dz
z
q
ψϕ
ψψϕϕψϕ
4
3
2
1
0
0
0
}{
=
d
d
dz
z
q
ψϕ
ψψϕϕψϕ
4
3
2
1
0
0
0
}{
=
d
d
dz
z
q
ψϕ
ψψϕϕψϕ
4
3
2
1
0
0
0
(82)
- matrix of transition from O0x0y0z0 to OAxAyAzA is the
same as AT0 for models Fig. 1, 2 and 3, equation (2);
- matrix of transition from O1x1y1z1, O2x2y2z2, O3x3y3z3, O4x4y4z4 to OAxAyAzA are the same as 0
1T , 02T , 0
3T , 04T
for models Fig. 1, 2 and 3, equation (3), (4), (5) and (6); - matrix of transition from Odxdydzd to O0x0y0z0 for small
angles has the form:
−−−−
=
10001
01.01
0
dddd
ddd
dd
d zH
L
Tϕψ
ϕψϕψ
(83)
The components of the angular velocity of the suspended and non suspended masses are identical to those of the model in Fig. 1 - equations (25), (29), (30), (31) and (32).
Angular velocity of the power unit is obtained after multiplying the matrices )(0 T
dT and 0dT and simplifying the
resulting expressions: d
Adx ϕϕω += 0
dAdy ψψω += 0
(84)
04 =Azω
After expression of kinetic and potential energy function of Relay system applies Lagrange equation (72). For the equations describing the laws of motion for the system can write:
[ ] [ ] [ ] [ ]FqCqq =+Β+Μ
67

Matrices [M4], [B4] and [C4] for the model of Fig. 4, which further includes the mass of power unit, located on the suspended masses to amend these models in Fig. 1, 2 and 3 as follows:
- the matrix [M4] change is in rows 1 to 3 - M4(1,1), M4 (1.3), M4(2.2), M4(3.1) and M4(3.3 ) supplemented with shown below articles showing the correlation between the suspended mass and
masses over suspended; appear new rows 8 ÷ 10 , and new columns 8 ÷ 10 which are colored in gray;
- the matrix [C4] appears only new rows 8 ÷ 10 , and new columns 8 ÷ 10 which are colored in gray
- The matrix [B4] also appears only new rows 8 ÷ 10 , and new columns 8 ÷ 10 which are colored in gray.
Inertia matrix [M4]:
М1+md
М1+0
М1+mdLd
М1 М1 М1 М
1 М
1-md
М1
М1
М1 М1+Jd
М1+0 М1 М1 М1 М
1 М
1 М
1+Jd
М1
М1+mdLd
М1 М1+J
d+mdLd2 М1 М1 М1
М1
М1-mdLd
М1
М1+Jd
М1 М1 М1 М1 М1 М1 М
1 М
1 М
1 М
1
М1 М1 М1 М1 М1 М1 М
1 М
1 М
1 М
1
М1 М1 М1 М1 М1 М1 М
1 М
1 М
1 М
1
М1 М1 М1 М1 М1 М1 М
1 М
1 М
1 М
1
М1-md
М1 М1-
mdLd М1 М1 М1
М1
М1+md
М1
М1
М1 М1+Jd
М1 М1 М1 М1 М
1 М
1 М
1+Jd
М1
М1 М1 М1+Jd
М1 М1 М1 М
1 М
1 М
1 М
1+Jd
Elastic matrix [C4]:
C1 C1 C1 C1 C1 C1 C1 C1 C1 C1
C1 C1 C1 C1 C1 C1 C1 C1 C1 C1
C1 C1 C1 C1 C1 C1 C1 C1 C1 C1
C1 C1 C1 C1 C1 C1 C1 C1 C1 C1
C1 C1 C1 C1 C1 C1 C1 C1 C1 C1
C1 C1 C1 C1 C1 C1 C1 C1 C1 C1
C1 C1 C1 C1 C1 C1 C1 C1 C1 C1
C1 C1 C1 C1 C1 C1 C1 C1
+4cde C1 C1
C1 C1 C1 C1 C1 C1 C1 C1 C1
+4cdbde2 C1
C1 C1 C1 C1 C1 C1 C1 C1 C1 C1
+4cdeld2
Damping matrix [B4]:
B1 B1 B1 B1 B1 B1 B1 B1 B1 B1
B1 B1 B1 B1 B1 B1 B1 B1 B1 B1
B1 B1 B1 B1 B1 B1 B1 B1 B1 B1
B1 B1 B1 B1 B1 B1 B1 B1 B1 B1
B1 B1 B1 B1 B1 B1 B1 B1 B1 B1
B1 B1 B1 B1 B1 B1 B1 B1 B1 B1
B1 B1 B1 B1 B1 B1 B1 B1 B1 B1
B1 B1 B1 B1 B1 B1 B1 B1
+4βde B1 B1
B1 B1 B1 B1 B1 B1 B1 B1 B1
+4βdebd2 B1
B1 B1 B1 B1 B1 B1 B1 B1 B1 B1
+4βdeld2
In matrix [M4], [C4], [B4] elements labeled M1, C1, B1
show that the same elements are equal numbers of matrix elements [M1]. In this way, do not repeat recordings.
For example, elements М4(1,1)=М1+md, which means that the М4(1,1)=M1(1,1)+md=m0+4mp+md.
68

This method of approach will be used in subsequent expression of matrix.
3.2.Mechanical mathematical model describing the
dynamic behavior of the vehicle and takes into account elastic suspended passenger seats (Fig. 5), work [4].
In the case, comparing the model takes into account the masses over suspended masses (Fig. 5) with a model fig. 1 generalized coordinates and their derivatives are:
{ }
=
3
2
1
4
3
2
1
0
0
0
d
d
d
zzz
z
q
ψψϕϕψϕ
}{
=
3
2
1
4
3
2
1
0
0
0
d
d
d
zzz
z
q
ψψϕϕψϕ
}{
=
3
2
4
3
2
1
0
0
0
d
d
d
zzz
z
q
ψψϕϕψϕ
(85)
- matrix of transition from O0x0y0z0 to OАxАyАzА is the same
as AT0 for models Fig. 1, 2 and 3, equation (2); - matrix of transition from O1x1y1z1, O2x2y2z2, O3x3y3z3,
O4x4y4z4 to OАxАyАzА are the same as 01T , 0
2T , 03T , 0
4T for models Fig. 1, 2 and 3, equation (3), (4), (5) and (6);
- the transition matrices of coordinate systems Od1xd1yd1zd1, Od2xd2yd2zd2, Od3xd3yd3zd3 to O0x0y0z0 have to type:
−=
1000100010001
11
101
dd
d
df
d zHbL
T (86)
−−
=
1000100010001
22
202
dd
d
df
d zHb
L
T (87)
−−
=
1000100010001
33
303
dd
d
db
d zHb
L
T (88)
The components of the angular velocity of the suspended and non suspended masses are identical to those of the model in Fig. 1 - Equations (25) (29) (30) (31) (32).
Angular velocity of the masses over suspended masses obtained after multiplication of matrices )(
1TA
dT , )(2
TAdT , )(
3TA
dT
and their derivatives AdT 1 , A
dT 2 , A
dT 3 by formula (26):
0221 ϕωωω === Axd
Axd
Axd
0321 ψωωω === Ayd
Ayd
Ayd
(92)
0321 === Azd
Azd
Azd ωωω
After determining the kinetic and potential energy, and
function of Relay and applying Lagrange’s equation for the equations of motion of the system can write:
[ ] [ ] [ ] [ ]FqCqq =+Β+Μ
Inertia matrix [M5]:
М1+md
1+md2+md3 М1+md1bd1-
md2bd2-md3bd3 М1+md1Ld1+md2Ld1+md3Ld2
М1 М1 М1 М1 М1-md1 М1-
md2 М1-md3
М1+md
1bd1-md2bd2-md3bd3
М1+Jd1+md1bd1
2+Jd2+md2bd22+
Jd3+md3bd32
М1+md1Ld1bd1-md2Ld1bd2+md3Ld2bd3
М1 М1 М1 М1 М1-
md1bd1 М1+
md2bd2 М1+md3bd3
М1+md
1Ld1+md2Ld1-md3Ld2
М1+md1Ld1bd1-
md2Ld1bd2+md3Ld2bd3
М1+Jd1+md1Ld12+
Jd2+md2Ld12+Jd3+md3L
d22
М1 М1 М1 М1 М1-
md1Ld1 М1-
md2Ld1 М1+md3Ld2
М1 М1 М1 М1 М1 М1 М1 М1 М1 М1
М1 М1 М1 М1 М1 М1 М1 М1 М1 М1
М1 М1 М1 М1 М1 М1 М1 М1 М1 М1
М1 М1 М1 М1 М1 М1 М1 М1 М1 М1
М1-md1 М1-md1bd1 М1-md1Ld1 М1 М1 М1 М1 М1+md
1 М1 М1
М1-md2 М1+md2bd2 М1-md2Ld1 М1 М1 М1 М1 М1 М1+
md2 М1
М1-md3 М1+md3bd3 М1+md3Ld2 М1 М1 М1 М1 М1 М1 М1+md3
Elastic matrix [C5]:
C1 C1 C1 C1 C1 C1 C1 C1 C1 C1
C1 C1 C1 C1 C1 C1 C1 C1 C1 C1
C1 C1 C1 C1 C1 C1 C1 C1 C1 C1
C1 C1 C1 C1 C1 C1 C1 C1 C1 C1
C1 C1 C1 C1 C1 C1 C1 C1 C1 C1
C1 C1 C1 C1 C1 C1 C1 C1 C1 C1
69

C1 C1 C1 C1 C1 C1 C1 C1 C1 C1
C1 C1 C1 C1 C1 C1 C1 C1+cd1 C1 C1
C1 C1 C1 C1 C1 C1 C1 C1 C1+
cd2 C1
C1 C1 C1 C1 C1 C1 C1 C1 C1 C1+
cd3
Damping matrix [B5]:
B1 B1 B1 B1 B1 B1 B1 B1 B1 B1
B1 B1 B1 B1 B1 B1 B1 B1 B1 B1
B1 B1 B1 B1 B1 B1 B1 B1 B1 B1
B1 B1 B1 B1 B1 B1 B1 B1 B1 B1
B1 B1 B1 B1 B1 B1 B1 B1 B1 B1
B1 B1 B1 B1 B1 B1 B1 B1 B1 B1
B1 B1 B1 B1 B1 B1 B1 B1 B1 B1
B1 B1 B1 B1 B1 B1 B1 B1+βd1 B1 B1
B1 B1 B1 B1 B1 B1 B1 B1 B1+βd2 B1
B1 B1 B1 B1 B1 B1 B1 B1 B1 B1+βd3
Matrices [M5], [B5] and [C5] in model of Fig. 5, which
included additional seats on the suspended masses have some differences with models in Fig. 1, 2 and 3 as follows:
- in the matrix M change is in rows 1 to 3 where elements M(1,1) ÷ M(1,3), M(2,1) ÷ M(2,3) and M(3,1) ÷ M(3.3) have additional members showing the correlation between the suspended mass and the masses over suspended. Here are appeared new rows 8 ÷ 10 and new columns 8 ÷ 10 colored in gray.
- in the matrix C are appeared only new rows 8 ÷ 10 and new columns 8 ÷ 10 colored in gray.
- in the matrix B are appeared new rows 8 ÷ 10 and new columns 8 ÷ 10 colored in gray.
Indices in the new elements of matrices [M5], [C5], [B5] show the serial number of the seat included in the mechanical model. By increasing the number of additional seats on the suspended masses, number of rows and columns of the matrix increases by one for each additional mass (passenger seat). New rows and columns in the matrix show the effect of additional masses on the behavior of the entire vibrating system. With the inclusion of more passenger seats matrices will be increased by one row and one column.
3.3.Mechanical mathematical model describing the
dynamic behavior of the car and taking into account the influence of rubber-metal shock absorbers.
Scheme is the same model as the model shown in Fig. 2
with the difference that the points of attachment of the arms are added elastic elements, taking into account the elastic properties of rubber-metal shock absorbers (Fig. 7). Detailed diagrams of front and rear axles are shown in Fig. 6.
The task considered vibration of the suspended mass and non suspended masses taking into account the movement of the axes Oz, Oy and rotations around the axes Ox, Oz, Oy.
The generalized coordinates of the model and their derivatives are:
{ }
=
4
3
2
1
4
3
2
1
0
0
4
3
2
1
0
0
0
yyyyzzzz
y
z
q θ
ϕϕϕϕψϕ
{ }
=
4
3
2
1
4
3
2
1
0
0
4
3
2
1
0
0
0
yyyyzzzz
y
z
q
θ
ϕϕϕϕψϕ
{ }
=
4
3
2
1
4
3
2
1
0
0
4
3
2
1
0
0
0
yyyyzzzz
y
z
q
θ
ϕϕϕϕψϕ
(93)
Matrix of transition from O0x0y0z0 to OAxAyAzA
+−−+−−−
−
=
1000coscoscossinsinsincossinsincossincoscossincoscossinsinsinsincoscossinsin
0sinsincoscoscos
0000000000000
0000000000000
00000
0 zy
Т А
ψϕθϕθψϕθϕθψϕψϕθϕθψϕθϕθψϕ
ψθψθψ
(94) The transition matrices of coordinate systems Od1xd1yd1zd1,
Od2xd2yd2zd2, Od3xd3yd3zd3 to O0x0y0z0 have to type:
+−−−−
=
1000cossin0sincos0001
111
11101 zH
ybL
T f
f
ϕϕϕϕ
(95)
70

+−+−
=
1000cossin0sincos0
001
222
22202 zH
ybL
T f
f
ϕϕϕϕ (96)
+−−−−
−
=
1000cossin0sincos0
001
333
33303 zH
ybL
T b
b
ϕϕϕϕ (97)
+−+−−
=
1000cossin0sincos0
001
444
44404 zH
ybL
T b
b
ϕϕϕϕ (98)
The components of the angular velocity of the suspended masses are preset as:
00ϕω =A
x
00 ψω =Ay
(99)
00 θω =Az
For the components of the angular velocity of the arms and
the three axes is obtained: 101 ϕϕω +=A
x
01 ψω =Ay
(100)
01 θω =Az
- the front left side:
202 ϕϕω +=Ax
02 ψω =Ay
(101)
02 θω =Az
- rear right side:
303 ϕϕω +=Ax
03 ψω =Ay
(102)
03 θω =Az
- rear left side: 404 ϕϕω +=A
x
04 ψω =Ay
(103)
04 θω =Az
The kinetic energy of the system:
240040
20040
230030
20030
220020
20020
210010
20010
20
20
20
20
240
230
220
210
200
200
200
200
200
))((21
)(21))((
21
)(21))((
21
)(21))((
21
)(21)
21(2)
21(2)
21(2)
21(2)(
21
)(21)(
21)(
21
21
21
21
21
21
ϕψϕ
θϕϕψϕ
θϕϕψϕ
θϕϕψϕ
θϕθθψψϕϕ
ϕϕϕϕϕϕθψϕ
mpbbbmpbp
bpmpbbbmpbp
bpmpfffmpfp
fpmpfffmpfp
fppzbpzfpybpyfpxb
pxbpxfpxfzyx
LLbLzzm
LHyymLLbLzzm
LHyymLLbLzzm
LHyymLLbLzzm
LHyymJJJJJ
JJJJJJymzm
+−++++
+++++−−+−++
+++−+++++++
+−+++−++−++
+−+−+++++++
+++++++++++=Τ(104)
Potential energy of the system:
24
23
22
21
24
23
22
21
24343
22121
2244000
22440
002
1330002
1330
002
2220002
2220
002
1110002
1110
002
442
332
222
11
)(21)(
21)(
21)(
21)(
21)(
21)(
21)(
21)(
21
)(21))((
21)
)((21))((
21)
)((21))((
21)
)((21))((
21)
)((21)(
21)(
21)(
21)(
21
zczczczcycycycyczzLLc
zzLLcqzbLbbzcqyRL
RHycqzbLbbzcqyRL
RHycqzbLbbzcqyRL
RHycqzbLbbzcqyRL
RHyczLczLczLczLc
ttttttttsbsbsb
sfsfsfbkbbkbbgzbykbb
kbgybkbbkbbgzbykbb
kbgyfkffkffgzfykff
kfgyfkffkffgzfykff
kfgycbrbcbrbcfrfcfrf
+++++−++−+−+−−+
+−+−−+−++−+++−+++
++++−+−−+−+−−++
++++−++++++−++−
−+++−+−++−+−−+−
−+++−−+−+−−+−=Π
ϕϕ
ϕϕϕψϕϕθ
ϕϕψϕϕθ
ϕϕψϕϕθ
ϕϕψϕϕθ
ϕϕϕϕϕ (105)
The function of Relay, taking account only of the damping
resistance is:
244
233
222
211 )(
21)(
21)(
21)(
21 zLzLzLzLR cbrbcbrbcfrfcfrf −−+−+−−+−= ϕβϕβϕβϕβ
(106)
Matrices [M6], [B6] and [C6] model of Fig. 6, which includes
additional rubber-metal shock absorbers in the arms, and further consideration of the movement along the axes Oz, Oy and rotations around the axes Ox, Oz, Oy, to amend these models in Fig. 1, 2 and 3 as follows:
- the matrix [M6], are appeared new rows 8 ÷ 17 and new columns 8 ÷ 17 colored in gray;
- the matrix [C6], are appeared new rows 8 ÷ 17 and new columns 8 ÷ 17 colored in gray;
- the matrix [B6] are appeared new rows 8 ÷ 17 and new columns 8 ÷ 17 colored in gray.
Inertia matrix [M6]: М1 М1 М1 М1
М1
М1 М1 М
1 М
1 М
1+mp М
1+mp М
1+mp М
1+mp М
1 1 1 М
1
М1 М1 М1 М1 М
1 М1 М1
М1+4mpH
М1-
2mpHLf+2mpH
Lb
М1-
mp(Lmpf+bf)
М1+mp(Lmpf+bf)
М1-
mp(Lmpb+b
b)
М1+mp(Lmpb+bb)
М1-
mpH 1+mpH
1-mpH
М1+mp
H
М1 М1 М1 М1 М
1 М1 М1
М1
М1
М1+mpLf
М1+mp
Lf
М1-
mpLb
М1-
mpLb
М1 1 1
М1
М1 М1 М1 М1 М
1 М1 М1
М1
М1
М1-
mpLmpf
М1
М1
М1
М1 1 1
М1
М1 М1 М1 М1 М
1 М1 М1
М1
М1
М1
М1+mpLmpf
М1
М1
М1 1 1
М1
М1 М1 М1 М1 М
1 М1 М1
М1
М1
М1
М1
М1-
mpLm
pb
М1
М1 1 1
М1
М1 М1 М1 М1 М М1 М1 М М М М М М1+mp
М М
71

1 1 1 1 1 1 Lmpb 1 1 1 1
М1 М1+4
mpH М1 М1 М
1 М1 М1
М1+m0+4
mp
М1-
2mpLf+2mpLb
М1
М1
М1
М1
М1-mp 1+
mp 1-mp
М1+mp
М1 М1-
2mpHLf+2mpHLb
М1 М1 М
1 М1 М1
М1-
2mpLf+2mpLb
М1+J0z+2Jpzf+2Jpz
b+2mpLf2+2mpLb
2
М1
М1
М1
М1
М1+mp
Lf 1-mpLf
1-mpLb
М1+mp
Lb
М1+mp
М1-mp(Lmpf+bf)
М1+mpLf
М1-mpLmpf
М1
М1 М1 М
1 М
1 М
1+mp М
1 М
1 М
1 М
1 1 1 М
1
М1+mp
М1+mp(Lmpf+bf)
М1+mpLf
М1 М
1+mpLm
pf М1 М1
М1
М1
М1
М1+mp
М1
М1
М1 1 1
М1
М1+mp
М1-mp(Lmpb+bb)
М1-mpLb
М1 М
1 М1-
mpLmpb М1
М1
М1
М1
М1
М1+mp
М1
М1 1 1
М1
М1+mp
М1+mp(Lmpb+bb)
М1-mpLb
М1 М
1 М1
М1+mpLmpb
М1
М1
М1
М1
М1
М1+mp
М1 1 1
М1
М1 М1-
mpH М1 М1 М
1 М1 М1
М1-mp
М1+mpLf
М1
М1
М1
М1
М1+mp 1 1
М1
М1 М1+mpH М1 М1
М1
М1 М1 М
1+mp М
1-mpLf М
1 М
1 М
1 М
1 М
1 1+mp 1
М1
М1 М1-
mpH М1 М1 М
1 М1 М1
М1-mp
М1+mpLb
М1
М1
М1
М1
М1 1 1+
mp
М1
М1 М1+mpH М1 М1
М1
М1 М1 М
1+mp М
1+mpLb М
1 М
1+ М
1 М
1 М
1 1 1 М
1+mp
Elastic matrix [C6]:
C1 C1 C1 C1 C1 C1 C1 C
1 C
1
C1+cg
z
C1+cgz
C1+cgz
C1+cgz 1 1 1
C1
C1 C1 C1 C1 C1 C1 C1
C1+2cgy(H+Rkf)+2cgy(H+Rkb
)
C1-
2cgyLf(H+Rkf)+2cgyLb(H+R
kb)
C1-
cgz(bf+bkf
)
C1+cgz(bf+bkf)
C1+-
cgz(bb+bkb
)
C1+cgz(bb+bkb)
1-cgy(H+Rkf)
1+cgy(H+Rkf)
1-cgy(H+Rkb)
C1+cgy(H+Rkb)
C1 C1 C1 C1 C1 C1 C1 C
1 C
1
C1+cgz
Lf
C1+cgzLf
C1-cg
zLb
C1-cg
zLb
1 1 1 C
1
C1 C1 C1 C1 C1 C1 C1 C
1+cg
yRkf
C1-
cgyLfRkf
C1-
crfLc
f-cgzbk
f-csfLs
f
C1+csfLsf
C1
C1
1-cgyRkf
1 1 C
1
C1 C1 C1 C1 C1 C1 C1 C
1+cg
yRkf
C1-
cgyLfRkf
C1-
csfLs
f
C1+crfLcf+cgzbkf+csfLsf
C1
C1 1
1+cgyR
kf 1
C1
C1 C1 C1 C1 C1 C1 C1 C
1+cg
yRkb
C1+cg
yLbRkb
C1
C1
C1-
crbLc
b-cgzbk
b-csbLs
b
C1+csbLs
b 1 1 1-cgyRkb
C1
C1 C1 C1 C1 C1 C1 C1 C
1+cg
yRkb
C1+cg
yLbRkb
C1
C1
C1-
csbLs
b
C1+crbLc
b+cgzbk
b+csbLs
b 1 1 1
C1+cgyR
kb
C1 C1+2cgy(H+Rkf)
+2cgy(H+Rkb) C1
C1+cgyRkf
C1+cgyRkf
C1+cgyRkb
C1+cgyRkb
C1+4c
gy
C1-
2cgyLf+2cgyL
b
C1
C1
C1
C1 1-
cgy 1cg
y 1-cgy
C1+c
gy
C1 C1-
2cgyLf(H+Rkf)+2cgyLb( H+Rkb)
C1 C1-
cgyLfRkf C1-
cgyLfRkf
C1+cgyLbRk
b
C1+cgyLbRk
b
C1-
2cgy
C1-
2cgy
C1
C1
C1
C1 1+c
gyL1-cgy
1-cgy
C1+cgyL
72

Lf+2cgyL
b
Lf2+
2cgyLb
2
f Lf Lb b
C1+cgz
C1-cgz(bf+bkf) C1
+cgzLf
C1-crfLcf-cgzbkf-
csfLsf
C1+-csfLsf
C1 C1 C
1 C
1
C1+crf+cgz+csf+ct
C1-csf
C1
C1 1 1 1
C1
C1+cgz
C1+cgz(bf+bkf) C1
+cgzLf C1+csf
Lsf
C1+crfLcf+cgzbkf+c
sfLsf C1 C1
C1
C1
C1-csf
C1+crf+cgz+csf+
ct
C1
C1 1 1 1
C1
C1+cgz C1-cgz(bb+bkb)
C1- cgzLb
C1 C1
C1-crbLcb-cgzbkb-csbLsb
C1-csbLsb
C1
C1
C1
C1
C1+crb+cgz+csb+ct
C1-csb 1 1 1
C1
C1+cgz
C1+cgz(bb+bkb) C1-
cgzLb C1 C1
C1+csbLsb
C1+crbLcb+cgzbkb+cs
bLsb
C1
C1
C1
C1
C1-csb
C1+crb+cgz+csb
+ct 1 1 1
C1
C1 C1-cgy(H+Rkf) C1 C1-
cgyRkf C1 C1 C1
C1-cgy
C1+cg
yLf
C1
C1
C1
C1
1+cgy+ct
1 1 C
1
C1 C1+cgy(H+Rkf) C1 C1 C1+cgy
Rkf C1 C1
C1+cg
y
C1-
cgyLf
C1
C1
C1
C1 1
1+cgy+ct
1 C
1
C1 C1-cgy(H+Rkb) C1 C1 C1 C1-
cgyRkb 0 C
1-cgy
C1-
cgyLb
C1
C1
C1
C1 1 1
1+cgy+ct
C1
C1 C1+cgy(H+Rkb) C1 C1 C1 C1 C1
+cgyRkb
C1+cg
y
C1+cg
yLb
C1
C1
C1
C1 1 1 1
C1+cgy+ct
Damping matrix [B6]: B1 B1 B1 B1 B1
B1
B1
B1
B1
B1
B1
B1
B1 1 1 1 1
B1 B1 B1 B1 B1 B
1 B
1 B
1 B
1 B
1 B
1 B
1 B
1 1 1 1 1
B1 B1 B1 B1 B1 B
1 B
1 B
1 B
1 B
1 B
1 B
1 B
1 1 1 1 1
B1 B1 B1 B1 B1 B
1 B
1 B
1 B
1 B
1-βrfLc B
1 B
1 B
1 1 1 1 1
B1 B1 B1 B1 B1 B
1 B
1 B
1 B
1 B
1
B1+βrfLc
f
B1
B1 1 1 1 1
B1 B1 B1 B1 B1 B
1 B
1 B
1 B
1 B
1 B
1
B1-
βrbLc
b
B1 1 1 1 1
B1 B1 B1 B1 B1 B
1 B
1 B
1 B
1 B
1 B
1 B
1
B1+βrbL
cb 1 1 1 1
B1 B1 B1 B1 B1 B
1 B
1 B
1 B
1 B
1 B
1 B
1 B
1 1 1 1 1
B1 B1 B1 B1 B1 B
1 B
1 B
1 B
1 B
1 B
1 B
1 B
1 1 1 1 1
B1 B1 B1 B1-
βrfLcf B1
B1
B1
B1
B1
B1+βrf
B1
B1
B1 1 1 1 1
B1 B1 B1 B1 B1+βrf
Lcf B
1 B
1 B
1 B
1 B
1 B
1+βrf B
1 B
1 1 1 1 1
B1 B1 B1 B1 B1 B
1-βrbLcb B
1 B
1 B
1 B
1 B
1 B
1+βrb B
1 1 1 1 1
B1 B1 B1 B1 B1 B
1
B1+βrbL
cb
B1
B1
B1
B1
B1
B1+βrb 1 1 1 1
B1 B1 B1 B1 B1 B
1 B
1 B
1 B
1 B
1 B
1 B
1 B
1 1 1 1 1
B1 B1 B1 B1 B1 B
1 B
1 B
1 B
1 B
1 B
1 B
1 B
1 1 1 1 1
B1 B1 B1 B1 B1 B
1 B
1 B
1 B
1 B
1 B
1 B
1 B
1 1 1 1 1
B1 B1 B1 B1 B1 B
1 B
1 B
1 B
1 B
1 B
1 B
1 B
1 1 1 1 1
73

New rows and columns in the matrix show the influence of the elasticity of rubber-metal shock absorbers on the behavior of the vibration system.
4.CONCLUSION
Presented mechanical mathematical models of cars with
arm suspension to allow doing the following conclusions: 1. The models have the identical mathematical structure
allowing their comparison. 2. Following the sequence of arm constructions and
forming matrices [M], [B], [C] and [Q] is used the method of mathematical induction. The structure of matrices shows that the inclusion of new masses and new generalized coordinates is manifested in the creation of new lines and columns in the matrix.
3. The models are tested numerically and it is shown in previous papers [1], [2].
4. The models allow to obtain frequencies and their own forms of vibrations. With this models can to investigate the dynamic behavior the vehicle driven on the road roughness.
5.ACKNOWLEDGEMENTS
This work is a part of the project DO 02-
47/10.12.2008 funded by "National Science Fund – Ministry of Education, Youth and Science".
6.REFERENCES 1. Павлов, Н., Л. Кунчев. Механо – математично
моделиране на независимо раменно окачване. ЕКОВАРНА'2009 – Сборник доклади, ТУ-Варна, 2009, 97-114.
2. Kunchev, L., N. Pavlov. Comparative Analysis on Mathematical Models Describing Vibrations of Road Vehicles with Different Types Suspensions. JUMV International Automotive Conference with Exhibition SCIENCE AND MOTOR VEHICLES 2011, Belgrade, Serbia, 487-498.
3. Pavlov, N., L. Kunchev. Determination of Natural Frequencies of a Car Taking Into Consideration Influence of a Power Unit. - Machines, Technologies, Materials, 2010, № 10-11, 30-35.
4. Kunchev, L., N. Pavlov. Modeling Drive Comfort of a Car With Full Arm Suspension Taking Account Masses Over Suspended. - 15th International Scientific Conference - Quality and Reliability of Technical Systems, Nitra, Slovakia, 2010, 365-371.
5. Kunchev, L., N. Pavlov, G. Yanachkov. Mechanic-mathematical Modeling of an Independent Suspension as Takes Account of Elasticity of Silent Blocks. - Machines, Technologies, Materials, 2010, № 3, 29-35.
74


![TOWARDS MECHANICAL METAMATHEMATICS › users › boyer › ftp › ics-reports › cmp43.pdf · metamathematics or mathematical logic [kleene, shoenfield]. In metamathematics, mathematical](https://img.pdfslide.us/doc/110x75/60b8b84781e4054863464503/towards-mechanical-metamathematics-a-users-a-boyer-a-ftp-a-ics-reports-a.jpg)