-
7/27/2019 MCLECTURE11.PPT
1/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
1
ManufacturingControls
FALL 2001
Lecture 11
-
7/27/2019 MCLECTURE11.PPT
2/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
2
Syllabus
DATE TOPIC NOTES 1. Sep. 20 Mechatronics Design Process Ch.
1
2. Sep. 25 System Modeling and Simulation Ch. 2
3. Sep. 27 Laplace Transforms and Transfer Functions Ch. 2
4. Oct. 2 Electrical Examples Ch.2, Notes 5. Oct. 4 Mechanical
Examples Ch.2, Notes
6. Oct. 9 More Examples, Thermal and Fluid Examples, QUIZ 1(Take
Home)
7. Oct. 11 Sensors and Transducers Ch. 3
8. Oct. 16 Digital control, Advanced MATLAB
9. Oct. 18 Analog and Digital Sensing Ch. 3,
Notes 10. Oct. 23 Actuating Devices, time and frequency response
Ch. 4
11. Oct. 25 DC Motor Model Ch. 4,Notes
12. Oct. 30 Boolean Logic Ch. 5
13. Nov. 1 Programmable Logic Controllers Ch. 5, Notes
14. Nov. 6 Stability and Compensators, P, PI and PD Ch. 6
15. Nov. 8 PID Controllers Ch. 7
16. Nov. 13 QUIZ 2(In Class - Open Book)
17. Nov. 15 Practical and Optimal Compensator Design Ch. 8 18.
Nov. 20 Frequency Response Methods Ch. 9, Notes
19. Nov. 22 THANKSGIVING HOLIDAY Ch. 9, Notes
20. Nov. 27 Optimal Design of a Motion Control System Ch. 9,
Notes
21. Nov. 29 QUIZ 3(In Class - Closed Book)
22. Dec. FINAL EXAM (In Class - Closed Book) Comprehensive
-
7/27/2019 MCLECTURE11.PPT
3/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
3
Todays objective
To continue the introduction tosystems theory by continuingthe
concept of frequencyresponse for digital control forcompensation of
a feedback
control for the motorized arm. By the end of this class you
will be able to describe theadvantage of using both timeand
frequency response fordescribing both the actuatingdevice and the
control
compensation of a motorizedsystem.
Understand first and secondorder systems.
-
7/27/2019 MCLECTURE11.PPT
4/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
4
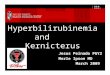
Example
Suppose a DC motor is used to drive a robot
arm horizontally.
Mg
x
y
L
Figure 12. A single joint robot arm driven by an
armature-controlled DC motor
horizontally
z
-
7/27/2019 MCLECTURE11.PPT
5/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
5
Frequency Response and Time
response
Permit descriptions with greater clarity
Time response also important
Need both
-
7/27/2019 MCLECTURE11.PPT
6/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
6
Sinusoids are eigenvectors of
linear systems
That is, if a sinusoid is put into a linear system
a sinusoid will be the output. It may be changed
only in magnitude and phase.
Linear Systemsin Msin(
-
7/27/2019 MCLECTURE11.PPT
7/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
7
o get frequency response Substitute s=jw into
transfer function to get
frequency response
H(s=jw)sinwt Msin(wt
-
7/27/2019 MCLECTURE11.PPT
8/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
8
Time response
The output of a system is the sum of two
responses:
Forced response or steady state response or
particular solution
Natural response or homogeneous solution
-
7/27/2019 MCLECTURE11.PPT
9/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
9
Second order systems
general form
G(s) = a/(s2+as+b)R(s)=1/s C(s) 2
4
0
rootsforequationsticcharacteriSolve
2
2
baas
bass
-
7/27/2019 MCLECTURE11.PPT
10/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
10
Stable forms of second order
system
Look at signs of
coefficients with a>0
and b> 0
Which of these areabsolutely stable, i.e.
have poles in the left
half plane?
0
0
0
0
0
0
0
0
2
2
2
2
2
2
2
2
bass
bass
bass
bass
bass
bass
bass
bass
-
7/27/2019 MCLECTURE11.PPT
11/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
11
Routh-Hurwitz Criterion
A systematic method for determining if the
characteristic equation has poles in the rhp,
lhp or on the jwaxis is the Routh Hurwitz
criteria.
It requires making a table
Examining the table for sign changes in the
first colums
-
7/27/2019 MCLECTURE11.PPT
12/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
12
Example for
a4s4+a3s
3+a2s2+a1s+a0
s4 a4 a2 a0
s3 a3 a1 0
s2 b1 b2 0
s1 c1 0 0
s0 d1 0 0
-
7/27/2019 MCLECTURE11.PPT
13/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
13
Second column
1
1
21
1
1
21
13
1
3
03
24
1
0
c
c
bb
d
b
bb
aa
c
a
aa
aa
b
-
7/27/2019 MCLECTURE11.PPT
14/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
14
Third column
1
1
1
2
1
1
3
2
3
3
04
2
0
0
0
0
0
c
c
b
d
b
b
a
c
a
a
aa
b
-
7/27/2019 MCLECTURE11.PPT
15/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
15
Exampleunity feedback system
G(s) = 1000/((s+2)(s+3)(s+5))R(s) C(s)
-
7/27/2019 MCLECTURE11.PPT
16/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
16
First step- form closed loop response
G(s) = 1000/
(s3+10s2+31s+1030))R(s) C(s)
-
7/27/2019 MCLECTURE11.PPT
17/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
17
Example for s3+10s2+31s+1030
s3 1 31 0
s2 10 1030 0
s1 -72 0 0
s0
103 0 0
-
7/27/2019 MCLECTURE11.PPT
18/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
18
Any row can be multiplied by a positive
constant without changing the results
s3 1 31 0
s2 1 103 0
s1 -72 0 0
s0
103 0 0
-
7/27/2019 MCLECTURE11.PPT
19/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
19
Computation
10372
072
1031
721
1031
311
1
1
c
b
-
7/27/2019 MCLECTURE11.PPT
20/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
20
Basic rule
The number of roots of the polynomial that
are in the right half plane is equal to the
number of sign changes in the first column.
In this example, there are two sign changes
indicating two poles in the right half plane and
an unstable system.
-
7/27/2019 MCLECTURE11.PPT
21/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
21
Check with Matlab
num = [0,0,0,1];
den = [1,10,31,1030];
sys=tf(num,den);
pzmap(sys)
Real Axis
ImagAxis
Pole-zero map
-14 -12 -10 -8 -6 -4 -2 0 2-10
-8
-6
-4
-2
0
2
4
6
8
10
-
7/27/2019 MCLECTURE11.PPT
22/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
22
Back to second order system
-
7/27/2019 MCLECTURE11.PPT
23/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
23
Stable forms of second order
system
Look at signs of
coefficients with a>0
and b> 0
Which of these areabsolutely stable, i.e.
have poles in the left
half plane?
0
0
0
0
0
0
0
0
2
2
2
2
2
2
2
2
bass
bass
bass
bass
bass
bass
bass
bass
-
7/27/2019 MCLECTURE11.PPT
24/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
24
Construct Routh Hurwitz table
s2 1 b 0
s1 a 0 0
s0 b 0 0
02 bass
-
7/27/2019 MCLECTURE11.PPT
25/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
25
Conclusion
Either a or b or both < 0
will cause at least one
sign change in the first
column and lead to anunstable system
Only stable second
order systems are 02 bass
02 bass
-
7/27/2019 MCLECTURE11.PPT
26/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
26
Second order systems
Response determined by pole locationsroots of characteristic
equation
Real unequal polesoverdamped system
Complex roots on jwaxisUndampedsystem
Complex roots not on jwaxisUnderdamped
system Real and equal rootsCritically damped
system
-
7/27/2019 MCLECTURE11.PPT
27/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
27
Consider the step responsepoles
real and unequal - overdamped from Nice pp. 168
G(s) = 9/(s2+9s+9)R(s)=1/s C(s)
Real Axis
ImagAxis
Pole-zero map
-8 -7 -6 -5 -4 -3 -2 -1 0 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
num = [0,0,1];
den = [1,9,9];sys=tf(num,den);
pzmap(sys)
Poles at: -7.854
and -1.146
Time (sec.)
Amplitude
Step Response
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.02
0.04
0.06
0.08
0.1
0.12From: U(1)
To:Y(1)
-
7/27/2019 MCLECTURE11.PPT
28/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
28
Nowpoles complex conjugates -
underdampedfrom Nice pp. 168
G(s) = 9/(s2+2s+9)R(s)=1/s C(s)
Real Axis
ImagAxis
Pole-zero map
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1-3
-2
-1
0
1
2
3
num = [0,0,1];
den = [1,2,9];
sys=tf(num,den);
pzmap(sys)
Time (sec.)
Amplitude
Step Response
0 1 2 3 4 5 60
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16From: U(1)
To:Y(1)
-
7/27/2019 MCLECTURE11.PPT
29/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
29
Nowpoles complex conjugates on jaxis- undampedfrom Nice pp.
168
G(s) = 9/(s2+9)R(s)=1/s C(s)
Real Axis
ImagAxis
Pole-zero map
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1-3
-2
-1
0
1
2
3
num = [0,0,1];
den = [1,0,9];
sys=tf(num,den);
pzmap(sys)
Time (sec.)
Amplitude
Step Response
0 5 10 15 200
0.05
0.1
0.15
0.2
0.25From: U(1)
To:Y(1)
-
7/27/2019 MCLECTURE11.PPT
30/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
30
Nowpoles real and equal- critically
dampedfrom Nice pp. 168
G(s) = 9/(s2+6s+9)R(s)=1/s C(s)
Real Axis
ImagAxis
Pole-zero map
-3 -2.5 -2 -1.5 -1 -0.5 0 0.5 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
num = [0,0,1];
den = [1,6,9];
sys=tf(num,den);
pzmap(sys)
Time (sec.)
Amplitude
Step Response
0 0.5 1 1.5 2 2.5 3 3.5 4 4.50
0.02
0.04
0.06
0.08
0.1
0.12From: U(1)
To:Y(1)
-
7/27/2019 MCLECTURE11.PPT
31/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
31
Summary for second order
systems
Overdamped response
sluggish
Poles: two real poles at
s1, -s2
Natural response: two
exponentials with time
constants equal to the
reciprocal of the polelocations
ttKKtc 21 21)(
ss
-
7/27/2019 MCLECTURE11.PPT
32/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
32
Underdamped response
Poles: Two complex poles
at: -sd+ andjwd
Natural response: Damped
sinusoid with an exponential
envelope whose timeconstant is equal to the
reciprocal of the poles real
part
The radian frequency of thesinusoid is equal to the
imaginary part of the poles
)cos()( w s
tAtc dtd
-
7/27/2019 MCLECTURE11.PPT
33/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
33
Undamped response
Poles: Two imaginary
poles at + and = wl
Natural response:
Undamped sinusoidwith radian frequency
equal to the imaginary
part of the poles
)cos()( w tAtc l
-
7/27/2019 MCLECTURE11.PPT
34/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
34
Critically damped response
Poles: Two real, equalpoles atsl
Natural response: One termis an exponential whosetime constant
is the
reciprocal of the polelocation. Another term is theproduct of
time, t, and anexponential whose timeconstant is equal to
thereciprocal of the pole
location. Note this is the fastest
response without overshoot.
tt tKKtc 11 21)( ss
-
7/27/2019 MCLECTURE11.PPT
35/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
35
General second order system
Second order systems
are so common that a
special notation has
been adopted todescribe them.
ratiodampingtheis
frequencynaturaltheis
where
bb
aa
So
ssbass
n
nn
n
n
nn
w
ww
ww
ww
,
2,2
2
2
222
-
7/27/2019 MCLECTURE11.PPT
36/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
36
Homework due next Thursday,
Nov. 1, 2001
For the following systems,
Determine the pole-zero plot
Step response
And determine if the systems are: Overdamped
Underdamped
Undamped
Critically damped Determine the damping ratio and natural
frequency
when appropriate for each
-
7/27/2019 MCLECTURE11.PPT
37/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
37
Homework systems
208
20
)(
)(
168
16
)(
)(
128
12
)(
)(
2
2
2
sssR
sC
sssR
sC
sssR
sC
-
7/27/2019 MCLECTURE11.PPT
38/38
10/30/2013 (C) 2001, Ernest L. Hall, University of Cincinnati
38
Any questions?