-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?
Truncation Errors, Correction Procedures
Giacomo Boffi
Dipartimento di Ingegneria Civile e Ambientale, Politecnico di
Milano
May 20, 2015
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?
Outline
Rayleigh-Ritz Example
Subspace iteration
How many eigenvectors?Modal Partecipation FactorDynamic
magnification factorStatic Correction
-
RR Example
m
m
m
m
k
k
k
k
m
k
x5
x4
x3
x2
x1
The structural matrices
K = k
+2 1 0 0 01 +2 1 0 00 1 +2 1 00 0 1 +2 10 0 0 1 +1
M = m1 0 0 0 00 1 0 0 00 0 1 0 00 0 0 1 00 0 0 0 1
The Ritz base vectors and the reduced matrices,
=
0.2 0.50.4 1.00.6 0.50.8 +0.01.0 1.0
K = k
[0.2 0.20.2 2.0
]M = m
[2.2 0.20.2 2.5
]
Red. eigenproblem ( = 2m/k):[2 22 2 22 2 20 25
]{z1z2
}=
{00
}The roots are 1 = 0.0824, 2 = 0.800, the frequencies are1 =
0.287
k/m [ = 0.285], 2 = 0.850
k/m [ = 0.831], while the
k/m normalized exact eigenvalues are [0.08101405,
0.69027853].The first eigenvalue is estimated with good
approximation.
-
RR Example
m
m
m
m
k
k
k
k
m
k
x5
x4
x3
x2
x1
The structural matrices
K = k
+2 1 0 0 01 +2 1 0 00 1 +2 1 00 0 1 +2 10 0 0 1 +1
M = m1 0 0 0 00 1 0 0 00 0 1 0 00 0 0 1 00 0 0 0 1
The Ritz base vectors and the reduced matrices,
=
0.2 0.50.4 1.00.6 0.50.8 +0.01.0 1.0
K = k
[0.2 0.20.2 2.0
]M = m
[2.2 0.20.2 2.5
]
Red. eigenproblem ( = 2m/k):[2 22 2 22 2 20 25
]{z1z2
}=
{00
}The roots are 1 = 0.0824, 2 = 0.800, the frequencies are1 =
0.287
k/m [ = 0.285], 2 = 0.850
k/m [ = 0.831], while the
k/m normalized exact eigenvalues are [0.08101405,
0.69027853].The first eigenvalue is estimated with good
approximation.
-
RR Example
m
m
m
m
k
k
k
k
m
k
x5
x4
x3
x2
x1
The structural matrices
K = k
+2 1 0 0 01 +2 1 0 00 1 +2 1 00 0 1 +2 10 0 0 1 +1
M = m1 0 0 0 00 1 0 0 00 0 1 0 00 0 0 1 00 0 0 0 1
The Ritz base vectors and the reduced matrices,
=
0.2 0.50.4 1.00.6 0.50.8 +0.01.0 1.0
K = k
[0.2 0.20.2 2.0
]M = m
[2.2 0.20.2 2.5
]
Red. eigenproblem ( = 2m/k):[2 22 2 22 2 20 25
]{z1z2
}=
{00
}The roots are 1 = 0.0824, 2 = 0.800, the frequencies are1 =
0.287
k/m [ = 0.285], 2 = 0.850
k/m [ = 0.831], while the
k/m normalized exact eigenvalues are [0.08101405,
0.69027853].The first eigenvalue is estimated with good
approximation.
-
RR Example
m
m
m
m
k
k
k
k
m
k
x5
x4
x3
x2
x1
The structural matrices
K = k
+2 1 0 0 01 +2 1 0 00 1 +2 1 00 0 1 +2 10 0 0 1 +1
M = m1 0 0 0 00 1 0 0 00 0 1 0 00 0 0 1 00 0 0 0 1
The Ritz base vectors and the reduced matrices,
=
0.2 0.50.4 1.00.6 0.50.8 +0.01.0 1.0
K = k
[0.2 0.20.2 2.0
]M = m
[2.2 0.20.2 2.5
]
Red. eigenproblem ( = 2m/k):[2 22 2 22 2 20 25
]{z1z2
}=
{00
}
The roots are 1 = 0.0824, 2 = 0.800, the frequencies are1 =
0.287
k/m [ = 0.285], 2 = 0.850
k/m [ = 0.831], while the
k/m normalized exact eigenvalues are [0.08101405,
0.69027853].The first eigenvalue is estimated with good
approximation.
-
RR Example
m
m
m
m
k
k
k
k
m
k
x5
x4
x3
x2
x1
The structural matrices
K = k
+2 1 0 0 01 +2 1 0 00 1 +2 1 00 0 1 +2 10 0 0 1 +1
M = m1 0 0 0 00 1 0 0 00 0 1 0 00 0 0 1 00 0 0 0 1
The Ritz base vectors and the reduced matrices,
=
0.2 0.50.4 1.00.6 0.50.8 +0.01.0 1.0
K = k
[0.2 0.20.2 2.0
]M = m
[2.2 0.20.2 2.5
]
Red. eigenproblem ( = 2m/k):[2 22 2 22 2 20 25
]{z1z2
}=
{00
}The roots are 1 = 0.0824, 2 = 0.800, the frequencies are1 =
0.287
k/m [ = 0.285], 2 = 0.850
k/m [ = 0.831], while the
k/m normalized exact eigenvalues are [0.08101405,
0.69027853].The first eigenvalue is estimated with good
approximation.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?
Rayleigh-Ritz Example
The Ritz coordinates eigenvector matrix is Z =[
1.329 0.031700.1360 1.240
].
The RR eigenvector matrix, and the exact one, :
=
+0.3338 0.6135+0.6676 1.2270+0.8654 0.6008+1.0632 +0.0254+1.1932
+1.2713
, =
+0.3338 0.8398+0.6405 1.0999+0.8954 0.6008+1.0779 +0.3131+1.1932
+1.0108
.
The accuracy of the estimates for the 1st mode is very good, on
thecontrary the 2nd mode estimates are in error starting from the
seconddigit.
It may be interesting to use = K1M as a new Ritz base to get
anew estimate of the Ritz and of the structural eigenpairs.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?
Rayleigh-Ritz Example
The Ritz coordinates eigenvector matrix is Z =[
1.329 0.031700.1360 1.240
].
The RR eigenvector matrix, and the exact one, :
=
+0.3338 0.6135+0.6676 1.2270+0.8654 0.6008+1.0632 +0.0254+1.1932
+1.2713
, =
+0.3338 0.8398+0.6405 1.0999+0.8954 0.6008+1.0779 +0.3131+1.1932
+1.0108
.
The accuracy of the estimates for the 1st mode is very good, on
thecontrary the 2nd mode estimates are in error starting from the
seconddigit.
It may be interesting to use = K1M as a new Ritz base to get
anew estimate of the Ritz and of the structural eigenpairs.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?
Introduction to Subspace Iteration
We have seen that the Rayleigh-Ritz procedure can offer agood
estimate for p M/2 modes, mostly because of thearbitrariness in the
choice of the Ritz reduced base .Solving a M = 2p order eigenvalue
problem to get peigenvalues is very onerous as the operation count
isO(M3).
If we could reduce the arbitrariness in the choice of the
Ritzbase vectors, we could use less vectors and solve a muchsmaller
(in terms of operations count) eigenvalue problem.If one thinks of
it, with a M = 1 base we could neverthelesscompute within arbitrary
accuracy one eigenvector usingMatrix Iteration, isnt it? the trick
is changing the base atevery iteration...It happens that Matrix
Iteration can be applied to a set oftrial vectors at once, under
the name of Subspace Iteration.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?
Introduction to Subspace Iteration
We have seen that the Rayleigh-Ritz procedure can offer agood
estimate for p M/2 modes, mostly because of thearbitrariness in the
choice of the Ritz reduced base .Solving a M = 2p order eigenvalue
problem to get peigenvalues is very onerous as the operation count
isO(M3).If we could reduce the arbitrariness in the choice of the
Ritzbase vectors, we could use less vectors and solve a muchsmaller
(in terms of operations count) eigenvalue problem.
If one thinks of it, with a M = 1 base we could
neverthelesscompute within arbitrary accuracy one eigenvector
usingMatrix Iteration, isnt it? the trick is changing the base
atevery iteration...It happens that Matrix Iteration can be applied
to a set oftrial vectors at once, under the name of Subspace
Iteration.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?
Introduction to Subspace Iteration
We have seen that the Rayleigh-Ritz procedure can offer agood
estimate for p M/2 modes, mostly because of thearbitrariness in the
choice of the Ritz reduced base .Solving a M = 2p order eigenvalue
problem to get peigenvalues is very onerous as the operation count
isO(M3).If we could reduce the arbitrariness in the choice of the
Ritzbase vectors, we could use less vectors and solve a muchsmaller
(in terms of operations count) eigenvalue problem.If one thinks of
it, with a M = 1 base we could neverthelesscompute within arbitrary
accuracy one eigenvector usingMatrix Iteration, isnt it? the trick
is changing the base atevery iteration...It happens that Matrix
Iteration can be applied to a set oftrial vectors at once, under
the name of Subspace Iteration.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?
Statement of the procedure
The first M eigenvalue equations can be written in
matrixalgebra, in terms of an N M matrix of eigenvectors andan M M
diagonal matrix that collects the eigenvalues
KNN
NM
= MNN
NM
MM
Using again the hat notation for the unnormalized iterate,from
the previous equation we can write
K1 = M0
where 0 is the matrix, N M, of the zero order trialvectors, and
1 is the matrix of the non-normalized firstorder trial vectors.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?
Orthonormalization
To proceed with iterations,
1. the trial vectors in n+1 must be orthogonalized, sothat each
trial vector converges to a differenteigenvector instead of
collapsing to the firsteigenvector,
2. all the trial vectors must be normalized, so that theratio
between the normalized vectors and theunnormalized iterated vectors
converges to thecorresponding eigenvalue.
These operations can be performed in different ways
(e.g.,ortho-normalization by Gram-Schmidt1 procedure).Another
possibility to do both at once is solving aRayleigh-Ritz eigenvalue
problem, defined in the Ritz baseconstituted by the vectors in
n+1.
1Next week, more on Gram-Schmidt procedure
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?
Orthonormalization
To proceed with iterations,
1. the trial vectors in n+1 must be orthogonalized, sothat each
trial vector converges to a differenteigenvector instead of
collapsing to the firsteigenvector,
2. all the trial vectors must be normalized, so that theratio
between the normalized vectors and theunnormalized iterated vectors
converges to thecorresponding eigenvalue.
These operations can be performed in different ways
(e.g.,ortho-normalization by Gram-Schmidt1 procedure).Another
possibility to do both at once is solving aRayleigh-Ritz eigenvalue
problem, defined in the Ritz baseconstituted by the vectors in
n+1.
1Next week, more on Gram-Schmidt procedure
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?
Associated Eigenvalue Problem
Developing the procedure for n = 0, with the generalized
matrices
K?1 = 1TK1
andM?1 = 1
TM1the Rayleigh-Ritz eigenvalue problem associated with
theorthonormalisation of 1 is
K?1Z1 = M?1Z1
21.
After solving for the Ritz coordinates mode shapes, Z1 and
thefrequencies 21, using any suitable procedure, it is usually
convenient tonormalize the shapes, so that Z1TM?1Z1 = I. The
ortho-normalized setof trial vectors at the end of the iteration is
then written as
1 = 1Z1.
The entire process can be repeated for n = 1, then n = 2, n = .
. .until the eigenvalues converge within a prescribed
tolerance.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?
Convergence
In principle, the procedure will converge to all the M
lowereigenvalues and eigenvectors of the structural problem, butit
was found that the subspace iteration method convergesfaster to the
lower p eigenpairs, those required for dynamicanalysis, if there is
some additional trial vector; on theother hand, too many additional
trial vectors slow down thecomputation without ulterior
benefits.
Experience has shown that the optimal total number M oftrial
vectors is the minimum of 2p and p + 8.The subspace iteration
method makes it possible tocompute simultaneosly a set of
eigenpairs within anyrequired level of approximation, and is the
preferred methodto compute the eigenpairs of a complex dynamic
system.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?
Convergence
In principle, the procedure will converge to all the M
lowereigenvalues and eigenvectors of the structural problem, butit
was found that the subspace iteration method convergesfaster to the
lower p eigenpairs, those required for dynamicanalysis, if there is
some additional trial vector; on theother hand, too many additional
trial vectors slow down thecomputation without ulterior
benefits.Experience has shown that the optimal total number M
oftrial vectors is the minimum of 2p and p + 8.
The subspace iteration method makes it possible tocompute
simultaneosly a set of eigenpairs within anyrequired level of
approximation, and is the preferred methodto compute the eigenpairs
of a complex dynamic system.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?
Convergence
In principle, the procedure will converge to all the M
lowereigenvalues and eigenvectors of the structural problem, butit
was found that the subspace iteration method convergesfaster to the
lower p eigenpairs, those required for dynamicanalysis, if there is
some additional trial vector; on theother hand, too many additional
trial vectors slow down thecomputation without ulterior
benefits.Experience has shown that the optimal total number M
oftrial vectors is the minimum of 2p and p + 8.The subspace
iteration method makes it possible tocompute simultaneosly a set of
eigenpairs within anyrequired level of approximation, and is the
preferred methodto compute the eigenpairs of a complex dynamic
system.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?
Standard Form
In algebra textbooks, the eigenproblem is usually stated as
Ay = y
and all the relevant algorithms to actually compute the
eigenthings(Jacobi method, QR method, etc) are referred to the
abovestatement of the problem.Our problem is, instead, formulated
as
Kx = Mx.
Any symmetric, definite positive matrix B can be subjected to a
uniqueCholeski Decomposition (CD), B = LLT where L is a lower
triangularmatrix. Applying CD to M, the eigenvector equation
is,
Kx = K (LT )1LT I
x = LLTM
x.
Premultiplying by L1, with y = LTx
L1K(LT )1 A
LTxy
= L1L I
LTxy
Ay = y.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?Modal Partecipation Factor
Dynamic magnificationfactor
Static Correction
How Many Eigenvectors
are needed to correctly represent the response of a MDOFsystem
to a time-varying load?
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?Modal Partecipation Factor
Dynamic magnificationfactor
Static Correction
Introduction
To understand how many eigenvectors we have to use in adynamic
analysis, we must consider two aspects, theloading shape and the
excitation frequency.In the following, well consider only external
loadings whosedependance on time and space can be separated, as
in
p(x, t) = r f (t),
so that we can discuss separately the two aspects of
theproblem.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?Modal Partecipation Factor
Dynamic magnificationfactor
Static Correction
Introduction
It is worth noting that earthquake loadings are precisely ofthis
type:
p(x, t) = Mr ug(t)
where the vector r is used to choose the structural dofsthat are
excited by the ground motion component underconsideration.
Usually r is simply a vector of zeros and ones that represents
thedegrees of freedom that are excited by a component of the
groundacceleration.
Multiplication of M by g (the acceleration of gravity)
anddivision of ug by g, serves to show a dimensional loadvector
multiplied by an adimensional function.
p(x, t) = gMr ug(t)g= rgfg(t)
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?Modal Partecipation Factor
Dynamic magnificationfactor
Static Correction
Introduction
It is worth noting that earthquake loadings are precisely ofthis
type:
p(x, t) = Mr ug(t)
where the vector r is used to choose the structural dofsthat are
excited by the ground motion component underconsideration.
Usually r is simply a vector of zeros and ones that represents
thedegrees of freedom that are excited by a component of the
groundacceleration.
Multiplication of M by g (the acceleration of gravity)
anddivision of ug by g, serves to show a dimensional loadvector
multiplied by an adimensional function.
p(x, t) = gMr ug(t)g= rgfg(t)
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?Modal Partecipation Factor
Dynamic magnificationfactor
Static Correction
Modal Partecipation Factor
Under the assumption of separability, we can write the i-th
modalequation of motion as
qi + 2ii qi + 2i qi =
Ti rMi
f (t)g
Ti MrMi
fg(t)= i f (t)
with the modal mass Mi = Ti Mi .It is apparent that the modal
response amplitude depends
I on the characteristics of the time dependency of loading,f
(t),
I on the so called modal partecipation factor i ,
i = Ti r/Mi
= gTi Mr/Mi = Ti r
g/Mi
= M1T r
Note that both the definitions of modal partecipation give it
thedimensions of an acceleration.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?Modal Partecipation Factor
Dynamic magnificationfactor
Static Correction
Modal Partecipation Factor
Under the assumption of separability, we can write the i-th
modalequation of motion as
qi + 2ii qi + 2i qi =
Ti rMi
f (t)g
Ti MrMi
fg(t)= i f (t)
with the modal mass Mi = Ti Mi .It is apparent that the modal
response amplitude depends
I on the characteristics of the time dependency of loading,f
(t),
I on the so called modal partecipation factor i ,
i = Ti r/Mi
= gTi Mr/Mi = Ti r
g/Mi
= M1T r
Note that both the definitions of modal partecipation give it
thedimensions of an acceleration.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?Modal Partecipation Factor
Dynamic magnificationfactor
Static Correction
Partecipation Factor Amplitudes
For a given loading r the modal partecipation factor i is
proportionalto the work done by the modal displacement qiTi for the
givenloading r:I if the mode shape and the loading shape are
approximately equal
(equal signs, component by component), the work (dot product)is
maximized,
I if the mode shape is significantly different from the
loading(different signs), there is some amount of cancellation and
thevalue of the s will be reduced.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?Modal Partecipation Factor
Dynamic magnificationfactor
Static Correction
Example
Consider a shear type building, with mass
distributionapproximately constant over its height:
r = {1, 1, . . . , 1}T and gMr mg{1, 1, . . . , 1}T .
an external loading and the first 3 eigenvectors as
sketchedbelow:
gMr r 1 2 3
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?Modal Partecipation Factor
Dynamic magnificationfactor
Static Correction
Example, cont.
gMr r 1 2 3
For EQ loading, 1 is relatively large for the first mode,
asloading components and displacements have the same sign,with
respect to other i s, where the oscillating nature ofthe higher
eigenvectors will lead to increasing cancellation.On the other
hand, consider the external loading, whosepeculiar shape is similar
to the 3rd mode. 3 will be morerelevant than i s for lower or
higher modes.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?Modal Partecipation Factor
Dynamic magnificationfactor
Static Correction
Modal Loads Expansion
We define the modal load contribution as
ri = Miai
and express the load vector as a linear combination of the
modalcontributions
r =i
Miai =i
ri .
If we premultiply by Tj the above equation,
Tj r = Tj
i
Miai =i
ijMiai = Mjaj
1. a modal load component works only for the
displacementsassociated with the corresponding eigenvector,
2. comparing with the definition of i = Ti r/Mi , we conclude
that
ri = Mii
R = M diag()
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?Modal Partecipation Factor
Dynamic magnificationfactor
Static Correction
Equivalent Static Forces
For mode i , the equation of motion is
qi + 2ii qi + 2i qi = i f (t)
with qi = iDi , we can write, to single out thedependency on the
modulating function,
Di + 2ii Di + 2i Di = f (t)
The modal contribution to displacement is
xi = iiDi(t)
and the modal contribution to elastic forces f i = Kxi canbe
written (being Ki = 2i Mi) as
f i = Kxi = iKiDi = 2i (iMi)Di = ri2i Di
1 Di (dimensionally the square of a time), is
calledpseudo-displacement.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?Modal Partecipation Factor
Dynamic magnificationfactor
Static Correction
Equivalent Static Forces
For mode i , the equation of motion is
qi + 2ii qi + 2i qi = i f (t)
with qi = iDi , we can write, to single out thedependency on the
modulating function,
Di + 2ii Di + 2i Di = f (t)
The modal contribution to displacement is
xi = iiDi(t)
and the modal contribution to elastic forces f i = Kxi canbe
written (being Ki = 2i Mi) as
f i = Kxi = iKiDi = 2i (iMi)Di = ri2i Di
1 Di (dimensionally the square of a time), is
calledpseudo-displacement.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?Modal Partecipation Factor
Dynamic magnificationfactor
Static Correction
Equivalent Static Response
The response can be determined by superposition of the effects
ofthese pseudo-static forces f i = ri2i Di(t).If a required
response quantity (be it a nodal displacement, a bendingmoment in a
beam, the total shear force in a building storey, etc etc)is
indicated by s(t), we can compute with a static calculation
(usuallyusing the FEM model underlying the dynamic analysis) the
modalstatic contribution ssti and write
s(t) =
ssti (2i Di(t)) =
si(t),
where the modal contribution to response si(t) is given by
1. static analysis using ri as the static load vector,
2. dynamic amplification using the factor 2i Di(t).
This formulation is particularly apt to our discussion of
differentcontributions to response components.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?Modal Partecipation Factor
Dynamic magnificationfactor
Static Correction
Equivalent Static Response
The response can be determined by superposition of the effects
ofthese pseudo-static forces f i = ri2i Di(t).If a required
response quantity (be it a nodal displacement, a bendingmoment in a
beam, the total shear force in a building storey, etc etc)is
indicated by s(t), we can compute with a static calculation
(usuallyusing the FEM model underlying the dynamic analysis) the
modalstatic contribution ssti and write
s(t) =
ssti (2i Di(t)) =
si(t),
where the modal contribution to response si(t) is given by
1. static analysis using ri as the static load vector,
2. dynamic amplification using the factor 2i Di(t).
This formulation is particularly apt to our discussion of
differentcontributions to response components.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?Modal Partecipation Factor
Dynamic magnificationfactor
Static Correction
Modal Contribution Factors (MCF)
Say that the static response due to r is denoted by sst,
thensi(t), the modal contribution to response s(t), can
bewritten
si(t) = ssti 2i Di(t) = s
st sstisst
2i Di(t) = sisst 2i Di(t).
We have introduced si =sstisst , the modal contribution
factor,
the ratio of the modal static contribution to the total
staticresponse.The si are dimensionless, are indipendent on the
eigenvectorscaling procedure and their sum is unity,
si = 1.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?Modal Partecipation Factor
Dynamic magnificationfactor
Static Correction
Maximum Response
Denote by Di0 the maximum absolute value (or peak) ofthe pseudo
displacement time history,
Di0 = maxt{|Di(t)|}.
It will besi0 = sisst 2i Di0
Eventually, the dynamic response factor for mode i , Rdi
isdefined by
Rdi =Di0Dsti0
where Dsti0 is the peak value of the static
pseudo-displacement
Dsti =f (t)2i
, Dsti0 =f02i
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?Modal Partecipation Factor
Dynamic magnificationfactor
Static Correction
Maximum Response
With f0 = max{|f (t)|} the peak p-displacement is
Di0 = Rdi f0/2i
and the peak of the modal contribution is
si0 = sisst 2i Di0 = f0sst si Rdi
The first two terms are independent of the mode, the lastare
independent from each other and their product is thefactor that
influences the modal contributions.Note that this product has the
sign of si , as the dynamicresponse factor is always positive.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?Modal Partecipation Factor
Dynamic magnificationfactor
Static Correction
Maximum Response
With f0 = max{|f (t)|} the peak p-displacement is
Di0 = Rdi f0/2i
and the peak of the modal contribution is
si0 = sisst 2i Di0 = f0sst si Rdi
The first two terms are independent of the mode, the lastare
independent from each other and their product is thefactor that
influences the modal contributions.Note that this product has the
sign of si , as the dynamicresponse factor is always positive.
-
MCFs exampleThe following table (from Chopra, 2nd ed.) displays
the si and theirpartial sums for a shear-type, 5 floors building
where all the storeymasses are equal and all the storey stiffnesses
are equal too.The response quantities chosen are x5n, the MCFs to
the topdisplacement and Vn, the MCF s to the base shear, for two
differentload shapes.
r = {0, 0, 0, 0, 1}T r = {0, 0, 0,1, 2}T
Top Disp. Base Shear Top Disp. Base Shear
n or i x5nix5j Vn
iVj x5n
ix5j Vn
iVj
1 0.880 0.880 1.252 1.252 0.792 0.792 1.353 1.3532 0.087 0.967
-0.362 0.890 0.123 0.915 -0.612 0.7413 0.024 0.991 0.159 1.048
0.055 0.970 0.043 1.1724 0.008 0.998 -0.063 0.985 0.024 0.994
-0.242 0.9305 0.002 1.000 0.015 1.000 0.006 1.000 0.070 1.000
Note that:1. for any given r, the base shear is more influenced
by higher modes, and2. for any given response quantity, the second,
skewed r gives greater
modal contributions for higher modes.
-
MCFs exampleThe following table (from Chopra, 2nd ed.) displays
the si and theirpartial sums for a shear-type, 5 floors building
where all the storeymasses are equal and all the storey stiffnesses
are equal too.The response quantities chosen are x5n, the MCFs to
the topdisplacement and Vn, the MCF s to the base shear, for two
differentload shapes.
r = {0, 0, 0, 0, 1}T r = {0, 0, 0,1, 2}T
Top Disp. Base Shear Top Disp. Base Shear
n or i x5nix5j Vn
iVj x5n
ix5j Vn
iVj
1 0.880 0.880 1.252 1.252 0.792 0.792 1.353 1.3532 0.087 0.967
-0.362 0.890 0.123 0.915 -0.612 0.7413 0.024 0.991 0.159 1.048
0.055 0.970 0.043 1.1724 0.008 0.998 -0.063 0.985 0.024 0.994
-0.242 0.9305 0.002 1.000 0.015 1.000 0.006 1.000 0.070 1.000
Note that:1. for any given r, the base shear is more influenced
by higher modes, and2. for any given response quantity, the second,
skewed r gives greater
modal contributions for higher modes.
-
MCFs exampleThe following table (from Chopra, 2nd ed.) displays
the si and theirpartial sums for a shear-type, 5 floors building
where all the storeymasses are equal and all the storey stiffnesses
are equal too.The response quantities chosen are x5n, the MCFs to
the topdisplacement and Vn, the MCF s to the base shear, for two
differentload shapes.
r = {0, 0, 0, 0, 1}T r = {0, 0, 0,1, 2}T
Top Disp. Base Shear Top Disp. Base Shear
n or i x5nix5j Vn
iVj x5n
ix5j Vn
iVj
1 0.880 0.880 1.252 1.252 0.792 0.792 1.353 1.3532 0.087 0.967
-0.362 0.890 0.123 0.915 -0.612 0.7413 0.024 0.991 0.159 1.048
0.055 0.970 0.043 1.1724 0.008 0.998 -0.063 0.985 0.024 0.994
-0.242 0.9305 0.002 1.000 0.015 1.000 0.006 1.000 0.070 1.000
Note that:1. for any given r, the base shear is more influenced
by higher modes, and2. for any given response quantity, the second,
skewed r gives greater
modal contributions for higher modes.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?Modal Partecipation Factor
Dynamic magnificationfactor
Static Correction
Dynamic Response Ratios
Dynamic Response Ratios are the same that we have seen for
SDOFsystems.Next page, for an undamped system,
I solid line, the ratio of the modal elastic force FS,i = Kiqi
sint tothe harmonic applied modal force, Pi sint, plotted against
thefrequency ratio = /i .For = 0 the ratio is 1, the applied load
is fully balanced by theelastic resistance.For fixed excitation
frequency, 0 for high modal frequencies.
I dashed line,the ratio of the modal inertial force, FI ,i =
2FS,i tothe load.
Note that for steady-state motion the sum of the elastic and
inertialforce ratios is constant and equal to 1, as in
(FS,i + FI ,i) sint = Pi sint.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?Modal Partecipation Factor
Dynamic magnificationfactor
Static Correction
Dynamic Response Ratios
Dynamic Response Ratios are the same that we have seen for
SDOFsystems.Next page, for an undamped system,
I solid line, the ratio of the modal elastic force FS,i = Kiqi
sint tothe harmonic applied modal force, Pi sint, plotted against
thefrequency ratio = /i .For = 0 the ratio is 1, the applied load
is fully balanced by theelastic resistance.For fixed excitation
frequency, 0 for high modal frequencies.
I dashed line,the ratio of the modal inertial force, FI ,i =
2FS,i tothe load.
Note that for steady-state motion the sum of the elastic and
inertialforce ratios is constant and equal to 1, as in
(FS,i + FI ,i) sint = Pi sint.
-
-3
-2
-1
0
1
2
3
4
0 0.5 1 1.5 2 2.5 3
Moda
l res
istan
ce ra
tios
Frequency ratio, =/i
FS/PiFI/Pi
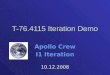
I For a fixed excitation frequency and high modal frequencies
thefrequency ratio 0.
I For 0 the response is quasi-static.I Hence, for higher modes
the response is pseudo-static.I On the contrary, for excitation
frequencies high enough the lower
modes respond with purely inertial forces.
-
-3
-2
-1
0
1
2
3
4
0 0.5 1 1.5 2 2.5 3
Moda
l res
istan
ce ra
tios
Frequency ratio, =/i
FS/PiFI/Pi
I For a fixed excitation frequency and high modal frequencies
thefrequency ratio 0.
I For 0 the response is quasi-static.
I Hence, for higher modes the response is pseudo-static.I On the
contrary, for excitation frequencies high enough the lower
modes respond with purely inertial forces.
-
-3
-2
-1
0
1
2
3
4
0 0.5 1 1.5 2 2.5 3
Moda
l res
istan
ce ra
tios
Frequency ratio, =/i
FS/PiFI/Pi
I For a fixed excitation frequency and high modal frequencies
thefrequency ratio 0.
I For 0 the response is quasi-static.I Hence, for higher modes
the response is pseudo-static.
I On the contrary, for excitation frequencies high enough the
lowermodes respond with purely inertial forces.
-
-3
-2
-1
0
1
2
3
4
0 0.5 1 1.5 2 2.5 3
Moda
l res
istan
ce ra
tios
Frequency ratio, =/i
FS/PiFI/Pi
I For a fixed excitation frequency and high modal frequencies
thefrequency ratio 0.
I For 0 the response is quasi-static.I Hence, for higher modes
the response is pseudo-static.I On the contrary, for excitation
frequencies high enough the lower
modes respond with purely inertial forces.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?Modal Partecipation Factor
Dynamic magnificationfactor
Static Correction
Static Correction
The preceding discussion indicates that higher
modescontributions to the response could be approximated withthe
static response, leading to the idea of a StaticCorrection of the
dynamic response
For a system where qi(t) pi(t)Ki for i > ndy,ndy being the
number of dynamically responding modes,we can write
x(t) xdy(t) + xst(t) =ndy1
iqi(t) +N
ndy+1
ipi(t)Ki
where the response for each of the first ndy modes can
becomputed as usual.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?Modal Partecipation Factor
Dynamic magnificationfactor
Static Correction
Static Correction
The preceding discussion indicates that higher
modescontributions to the response could be approximated withthe
static response, leading to the idea of a StaticCorrection of the
dynamic response
For a system where qi(t) pi(t)Ki for i > ndy,ndy being the
number of dynamically responding modes,we can write
x(t) xdy(t) + xst(t) =ndy1
iqi(t) +N
ndy+1
ipi(t)Ki
where the response for each of the first ndy modes can
becomputed as usual.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?Modal Partecipation Factor
Dynamic magnificationfactor
Static Correction
Static Modal Components
The static modal displacement component xj , j > ndy canbe
written
xj(t) = jqj(t) j
Tj
Kjp(t) = Fjp(t)
The modal flexibility matrix is defined by
Fj =j
Tj
Kj
and is used to compute the j-th mode static deflections dueto
the applied load vector.The total displacements, the dynamic
contributions and thestatic correction, for p(t) = r f (t), are
then
x ndy1
jqj(t) + f (t)N
ndy+1
Fj r.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?Modal Partecipation Factor
Dynamic magnificationfactor
Static Correction
Alternative Formulation
Our last formula for static correction is
x ndy1
jqj(t) + f (t)N
ndy+1
Fj r.
To use the above formula all mode shapes, all modalstiffnesses
and all modal flexibility matrices must becomputed, undermining the
efficiency of the procedure.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?Modal Partecipation Factor
Dynamic magnificationfactor
Static Correction
Alternative Formulation
This problem can be obviated computing the total
staticdisplacements and expressing it in terms of
modalcontributions: xst = K1rf (t) =
N1 Fj rf (t).
Subtracting the static displacements due to the first ndymodes
to both members it isN
ndy+1
Fj rf (t) = K1rf (t)ndy1
Fj rf (t) = f (t)
(K1
ndy1
Fj
)r.
The corrected total displacements have hence theexpression
x ndy1
iqi(t) + f (t)
(K1
ndy1
Fi
)r,
Note that the constant term following f (t) can becomputed with
information already in our possess at theend of the dynamic
analysis.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?Modal Partecipation Factor
Dynamic magnificationfactor
Static Correction
Alternative Formulation
This problem can be obviated computing the total
staticdisplacements and expressing it in terms of
modalcontributions: xst = K1rf (t) =
N1 Fj rf (t).
Subtracting the static displacements due to the first ndymodes
to both members it isN
ndy+1
Fj rf (t) = K1rf (t)ndy1
Fj rf (t) = f (t)
(K1
ndy1
Fj
)r.
The corrected total displacements have hence theexpression
x ndy1
iqi(t) + f (t)
(K1
ndy1
Fi
)r,
Note that the constant term following f (t) can becomputed with
information already in our possess at theend of the dynamic
analysis.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?Modal Partecipation Factor
Dynamic magnificationfactor
Static Correction
Alternative Formulation
This problem can be obviated computing the total
staticdisplacements and expressing it in terms of
modalcontributions: xst = K1rf (t) =
N1 Fj rf (t).
Subtracting the static displacements due to the first ndymodes
to both members it isN
ndy+1
Fj rf (t) = K1rf (t)ndy1
Fj rf (t) = f (t)
(K1
ndy1
Fj
)r.
The corrected total displacements have hence theexpression
x ndy1
iqi(t) + f (t)
(K1
ndy1
Fi
)r,
Note that the constant term following f (t) can becomputed with
information already in our possess at theend of the dynamic
analysis.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?Modal Partecipation Factor
Dynamic magnificationfactor
Static Correction
Effectiveness of Static Correction
In these circumstances, few modes with static correctiongive
results comparable to the results obtained using muchmore modes in
a straightforward modal displacementsuperposition analysis.
I An high number of modes is required to account forthe spatial
distribution of the loading but only a fewlower modes are subjected
to significant dynamicamplification.
I Refined stress analysis is required even if the
dynamicresponse involves only a few lower modes.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?Modal Partecipation Factor
Dynamic magnificationfactor
Static Correction
Effectiveness of Static Correction
In these circumstances, few modes with static correctiongive
results comparable to the results obtained using muchmore modes in
a straightforward modal displacementsuperposition analysis.
I An high number of modes is required to account forthe spatial
distribution of the loading but only a fewlower modes are subjected
to significant dynamicamplification.
I Refined stress analysis is required even if the
dynamicresponse involves only a few lower modes.
-
Truncation Errors,CorrectionProcedures
Giacomo Boffi
Rayleigh-RitzExample
Subspace iteration
How manyeigenvectors?Modal Partecipation Factor
Dynamic magnificationfactor
Static Correction
Effectiveness of Static Correction
In these circumstances, few modes with static correctiongive
results comparable to the results obtained using muchmore modes in
a straightforward modal displacementsuperposition analysis.
I An high number of modes is required to account forthe spatial
distribution of the loading but only a fewlower modes are subjected
to significant dynamicamplification.
I Refined stress analysis is required even if the
dynamicresponse involves only a few lower modes.
Rayleigh-Ritz ExampleSubspace iterationHow many
eigenvectors?Modal Partecipation FactorDynamic magnification
factorStatic Correction