Embed Size (px)
Citation preview

Matlab Exercises 1
Matlab
Exercises
1 Matlab Exercises for Chapter 1 ............................................... 2
2 Matlab Exercises for Chapter 2 ............................................... 7
3 Matlab Exercises for Chapter 3 ............................................. 10
4 Matlab Exercises for Chapter 4 ............................................. 13
5 Matlab Exercises for Chapter 5 ............................................. 15
6 Matlab Exercises for Chapter 6 ............................................. 18
7 Matlab Exercises for Chapter 7 ............................................. 21
8 Matlab Exercises for Chapter 8 ............................................. 25
9 Matlab Exercises for Chapter 9 ............................................. 29
Matlab Exercises 2
1 Matlab Exercises for Chapter 1
% Matlab exercises for Chapter 1
%
% The following codes provide some exercises or demonstrations
% which students may run in Matlab.
% The purpose of these exercises is to learn using Matlab for
% signal processing simulation.
%
% The best way to run this exercise is to copy and paste each
% Matlab command to the Matlab command window and then observe
% the results.
% However, it is also possible to run the entire exercise.
% To do so from the Matlab command windos, go to `File' and choose
`Run script'.
% Type the filename (which has .m extension) or use the browse
% button to find the file.
% To run the m-file from Matlab editor, go to `Tools' and choose
`Run'.
%
% By the end of the exercises, students should be able to
% - generate scalars and vectors in Matlab
% - manipulate scalars and vectors
% - plot vectors
% - generate unit step and impulse functions
% - generate cosine and sine functions
%
% Note:
% Matlab works with discrete-time signals (i.e. sequences of
numbers),
% not continuous-time signals.
% However, as we shall see shortly, we can generate an
% approximately continous-time signals.
%
%
%
% Exercise 1. Scalar (single value)
%
% We first create a variable called `x' which contains a number.
% The command to do this is
x = 10 % `x' now contains a value 10.
% We can also generate a decimal number.
y = 0.5 % `y' contains a value 0.5.
% We can manipulate these variables using the following operands.
x + y % adding the two variables.
%The outcome is stored in a temporary variable `ans'.
x - y % subtracting `y' from `x'.
x * y % multiplying `x' and `y'.
x / y % dividing `x' and `y'.
x ^ y % raising `x' to the power of `y'.
%
% We can also change the value inside these variables,
% simply by replacing them with new values.
x = 5.5 % `x' now contains a value 5.5.
y = 2 % `y' now contains a value 2.
Matlab Exercises 3
%
% Experiment with different values and
% manipulate them using the operands above before
% proceeding to the next exercise.
%
%
% Exercise 2. Vector
%
% A variable is not restricted to contain a single number.
% It can contain a sequence of numbers (i.e. a vector),
% a matrix, even a 3D matrix (which we will cover in much later
exercises).
%
% To create any sequence of numbers, we can use square brackets `['
and `]'.
x = [25 0.5 -2 4.3 3.8 1] % `x' contains 6 values.
% Observe that we can have integer and decimal numbers in a
sequence.
%
% If the sequence has a certain pattern, it can be generated like
this
y = 1:2:11 % `y' contains numbers incremented by a positive integer
2.
% The first number, 0, and last number, 10, correspond to the
range,
% while the second number, 2, corresponds to the increment.
% This command is very useful when we try to generate a very long
sequence.
%
% Now, experiment with different range and increment values,
% before proceeding to the next exercise.
%
% We can manipulate vectors with scalars using the operands above.
%
z = 2 % scalar variable
x + 2 % All values in `x' are added by 2.
x - 2 % All values in `x' are subtracted by 2.
x * 2 % All values in `x' are multiplied by 2.
x / 2 % All values in `x' are divided by 2.
x .^ 2 % All values in `x' are raised to a power of 2.
% A `.' is required for a general sample-by-sample operation.
%
% We can also manipulate vectors with vectors using the same
operands above.
x + y % Sample-by-sample addition.
x - y % Sample-by-sample subtraction.
% To do sample-by-sample multiplication, division or power, we need
to add
% a `.' before the operand.
x .* y
x ./ y
x .^ y
% These operations will only work if both vectors are arranged in
the same way.
% Currently, they are arranged horizontally and thus called `row
vectors'.
Matlab Exercises 4
% We can arrange them vertically, i.e. `column vectors', by
transposing them.
x = x' % `x' is now transposed and become a column vector.
%
% Now, try applying the operations above between `x' and `y'.
% We will see that an error message will appear.
%
% To display a particular sample in a vector, use brackets `(' and
`)'.
x(3) % displays the third sample of vector `x'.
y(5) % displays the fifth sample of vector `y'.
%
% Specifiying a zero or negative value inside the bracket will
produce an
% error message. Try this.
%
% Furthermore, we can also display a subset of the vectors.
x(2:4) % displays the second to fourth samples.
y(3:2:5) % displays the third and fifth samples.
%
%
% Exercise 3. Unit step and impulse functions
%
% In the lecture notes, we come across the unit step function
`u[n]'.
% `u[n]' has values of 1 given n=0 or n>0 and values of 0 given
n<0.
%
% One way of creating this sequence is to write the zeros and ones
explicitly.
unit_step = [0 0 0 0 0 1 1 1 1 1 1]
% Observe that the first 5 samples correspond to n<0,
% and the first `1' corresponds to n=0.
% So we now generate the discrete time samples.
n = [-5 -4 -3 -2 -1 0 1 2 3 4 5]
% Of course, a shorter command is `n=-5:1:5'.
%
% To plot the unit step function,
stem (n,unit_step)
% For details how to use `stem', type `help stem' in the command
window.
%
% Matlab has in-built functions to generate long sequences of `1'
and `0',
% which are called `ones' and `zeros' respectively.
x = zeros (1,5) % Generates 5 samples of `0'.
y = ones (1,6) % Generates 6 samples of `1'.
% We can concatenate them together to form a unit step function.
another_unit_step = [x y]
% Again, for more details on how to use `zeros' and `ones', use the
`help' command .
%
% The impulse function can be generated in a similar fashion.
unit_impulse = [zeros(1,5) 1 zeros(1,5)]
stem (n, unit_impulse)
%
Matlab Exercises 5
-5 0 5 10 150
0.5
1unit step
-5 0 5 10 150
0.5
1unit step shifted left
-5 0 5 10 150
0.5
1unit step shifted right
-5 0 5 10 150
0.5
1y
0 2 4 6 8 10 12 14 16 18 200
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1alphan
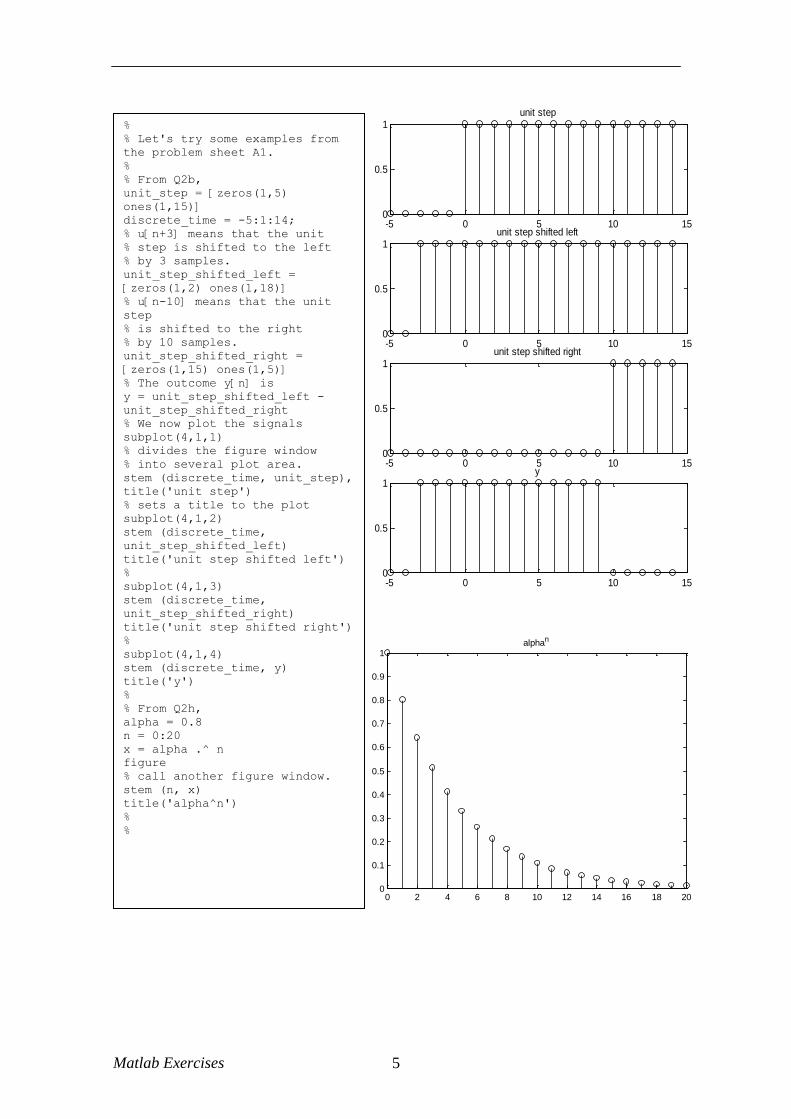
%
% Let's try some examples from
the problem sheet A1.
%
% From Q2b,
unit_step = [zeros(1,5)
ones(1,15)]
discrete_time = -5:1:14;
% u[n+3] means that the unit
% step is shifted to the left
% by 3 samples.
unit_step_shifted_left =
[zeros(1,2) ones(1,18)]
% u[n-10] means that the unit
step
% is shifted to the right
% by 10 samples.
unit_step_shifted_right =
[zeros(1,15) ones(1,5)]
% The outcome y[n] is
y = unit_step_shifted_left -
unit_step_shifted_right
% We now plot the signals
subplot(4,1,1)
% divides the figure window
% into several plot area.
stem (discrete_time, unit_step),
title('unit step')
% sets a title to the plot
subplot(4,1,2)
stem (discrete_time,
unit_step_shifted_left)
title('unit step shifted left')
%
subplot(4,1,3)
stem (discrete_time,
unit_step_shifted_right)
title('unit step shifted right')
%
subplot(4,1,4)
stem (discrete_time, y)
title('y')
%
% From Q2h,
alpha = 0.8
n = 0:20
x = alpha .^ n
figure
% call another figure window.
stem (n, x)
title('alpha^n')
%
%
Matlab Exercises 6
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1continuous sinusoid
0 10 20 30 40 50 60 70 80 90 100-1
-0.5
0
0.5
1x=cos(n*pi/8)
0 10 20 30 40 50 60 70 80 90 100-1
-0.5
0
0.5
1y=cos(n*pi/16
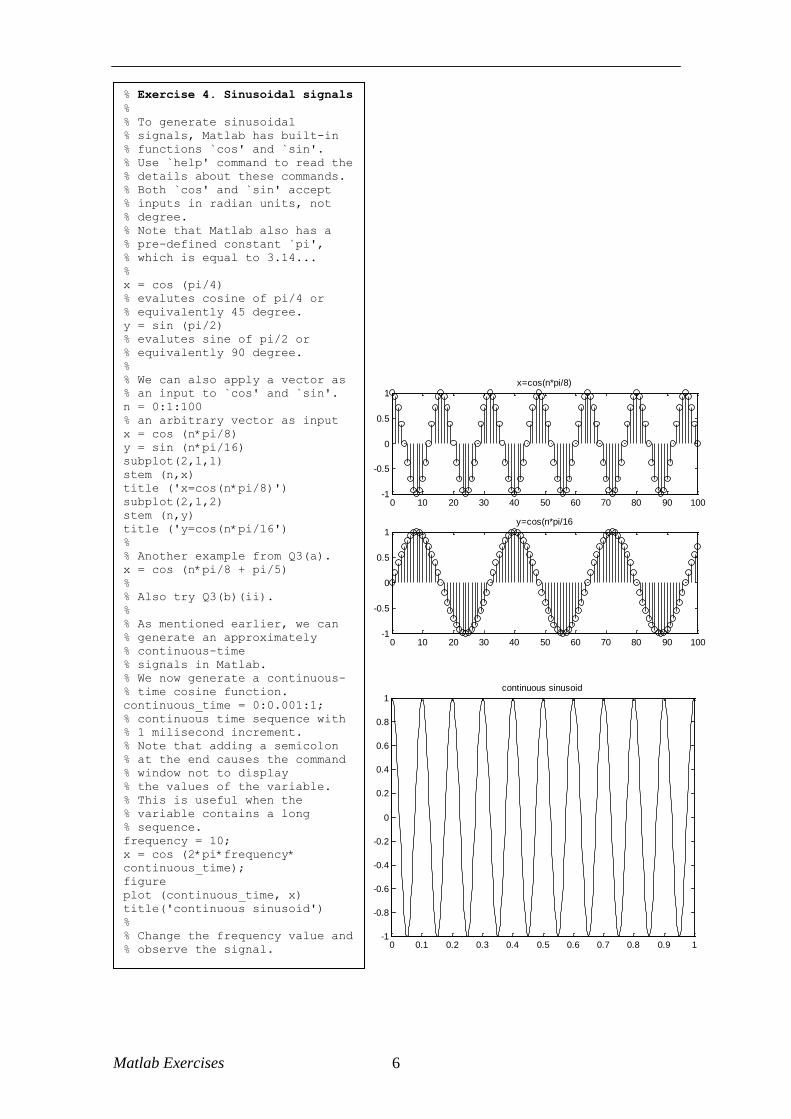
% Exercise 4. Sinusoidal signals
%
% To generate sinusoidal
% signals, Matlab has built-in
% functions `cos' and `sin'.
% Use `help' command to read the
% details about these commands.
% Both `cos' and `sin' accept
% inputs in radian units, not
% degree.
% Note that Matlab also has a
% pre-defined constant `pi',
% which is equal to 3.14...
%
x = cos (pi/4)
% evalutes cosine of pi/4 or
% equivalently 45 degree.
y = sin (pi/2)
% evalutes sine of pi/2 or
% equivalently 90 degree.
%
% We can also apply a vector as
% an input to `cos' and `sin'.
n = 0:1:100
% an arbitrary vector as input
x = cos (n*pi/8)
y = sin (n*pi/16)
subplot(2,1,1)
stem (n,x)
title ('x=cos(n*pi/8)')
subplot(2,1,2)
stem (n,y)
title ('y=cos(n*pi/16')
%
% Another example from Q3(a).
x = cos (n*pi/8 + pi/5)
%
% Also try Q3(b)(ii).
%
% As mentioned earlier, we can
% generate an approximately
% continuous-time
% signals in Matlab.
% We now generate a continuous-
% time cosine function.
continuous_time = 0:0.001:1;
% continuous time sequence with
% 1 milisecond increment.
% Note that adding a semicolon
% at the end causes the command
% window not to display
% the values of the variable.
% This is useful when the
% variable contains a long
% sequence.
frequency = 10;
x = cos (2*pi*frequency*
continuous_time);
figure
plot (continuous_time, x)
title('continuous sinusoid')
%
% Change the frequency value and
% observe the signal.
Matlab Exercises 7
2 Matlab Exercises for Chapter 2
-20 -15 -10 -5 0 5 10 15 200
0.5
1unit step
-20 -15 -10 -5 0 5 10 15 200
0.5
1unit step shifted left
-20 -15 -10 -5 0 5 10 15 200
0.5
1unit step shifted right
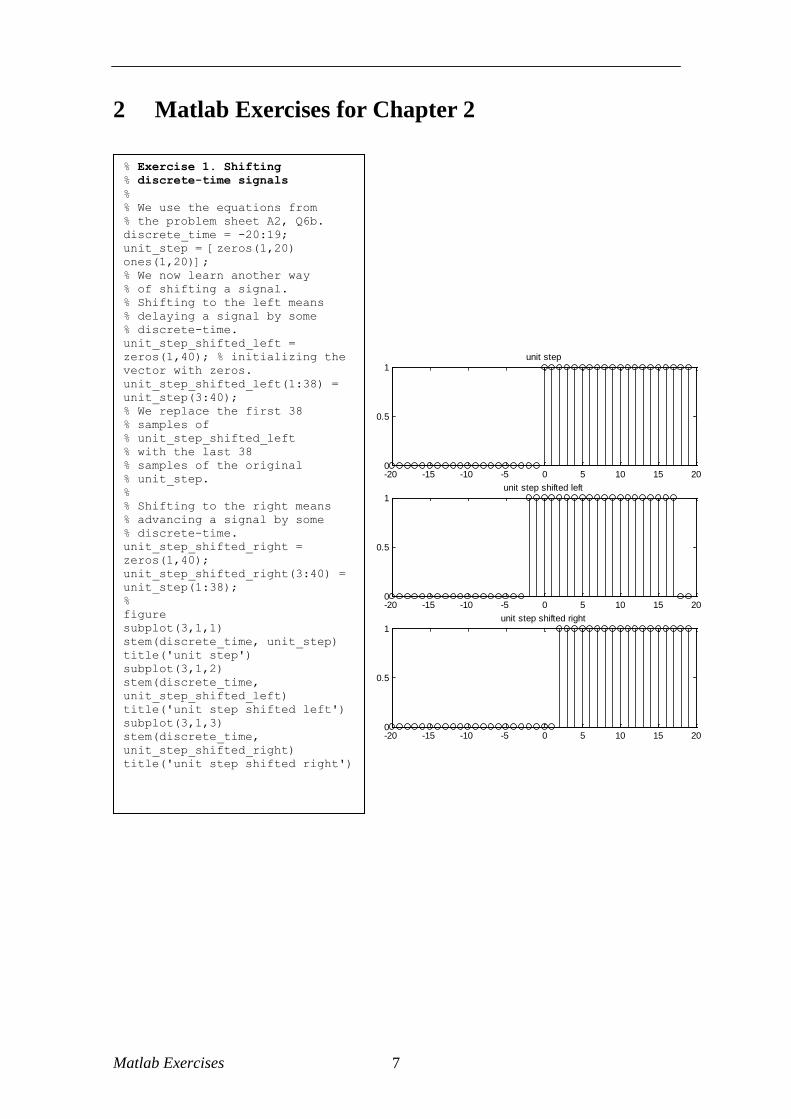
% Exercise 1. Shifting
% discrete-time signals
%
% We use the equations from
% the problem sheet A2, Q6b.
discrete_time = -20:19;
unit_step = [zeros(1,20)
ones(1,20)];
% We now learn another way
% of shifting a signal.
% Shifting to the left means
% delaying a signal by some
% discrete-time.
unit_step_shifted_left =
zeros(1,40); % initializing the
vector with zeros.
unit_step_shifted_left(1:38) =
unit_step(3:40);
% We replace the first 38
% samples of
% unit_step_shifted_left
% with the last 38
% samples of the original
% unit_step.
%
% Shifting to the right means
% advancing a signal by some
% discrete-time.
unit_step_shifted_right =
zeros(1,40);
unit_step_shifted_right(3:40) =
unit_step(1:38);
%
figure
subplot(3,1,1)
stem(discrete_time, unit_step)
title('unit step')
subplot(3,1,2)
stem(discrete_time,
unit_step_shifted_left)
title('unit step shifted left')
subplot(3,1,3)
stem(discrete_time,
unit_step_shifted_right)
title('unit step shifted right')
Matlab Exercises 8
0 2 4 6 8 10 12 14 16 18 200
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0.045
0.05impulse response
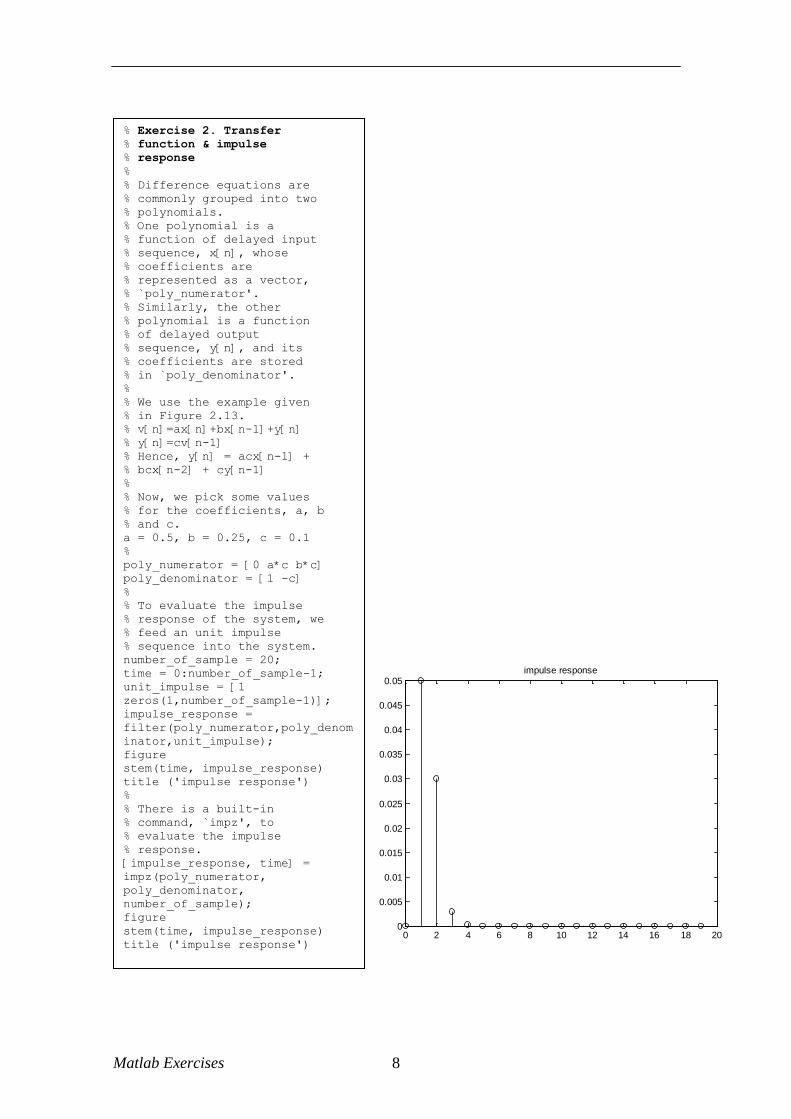
% Exercise 2. Transfer
% function & impulse
% response
%
% Difference equations are
% commonly grouped into two
% polynomials.
% One polynomial is a
% function of delayed input
% sequence, x[n], whose
% coefficients are
% represented as a vector,
% `poly_numerator'.
% Similarly, the other
% polynomial is a function
% of delayed output
% sequence, y[n], and its
% coefficients are stored
% in `poly_denominator'.
%
% We use the example given
% in Figure 2.13.
% v[n]=ax[n]+bx[n-1]+y[n]
% y[n]=cv[n-1]
% Hence, y[n] = acx[n-1] +
% bcx[n-2] + cy[n-1]
%
% Now, we pick some values
% for the coefficients, a, b
% and c.
a = 0.5, b = 0.25, c = 0.1
%
poly_numerator = [0 a*c b*c]
poly_denominator = [1 -c]
%
% To evaluate the impulse
% response of the system, we
% feed an unit impulse
% sequence into the system.
number_of_sample = 20;
time = 0:number_of_sample-1;
unit_impulse = [1
zeros(1,number_of_sample-1)];
impulse_response =
filter(poly_numerator,poly_denom
inator,unit_impulse);
figure
stem(time, impulse_response)
title ('impulse response')
%
% There is a built-in
% command, `impz', to
% evaluate the impulse
% response.
[impulse_response, time] =
impz(poly_numerator,
poly_denominator,
number_of_sample);
figure
stem(time, impulse_response)
title ('impulse response')
Matlab Exercises 9
-5 -4 -3 -2 -1 0 1 2 3 4 50
0.2
0.4
0.6
0.8
1x[n]
-5 -4 -3 -2 -1 0 1 2 3 4 50
1
2
3h[n]
-5 -4 -3 -2 -1 0 1 2 3 4 50
1
2
3y[n]
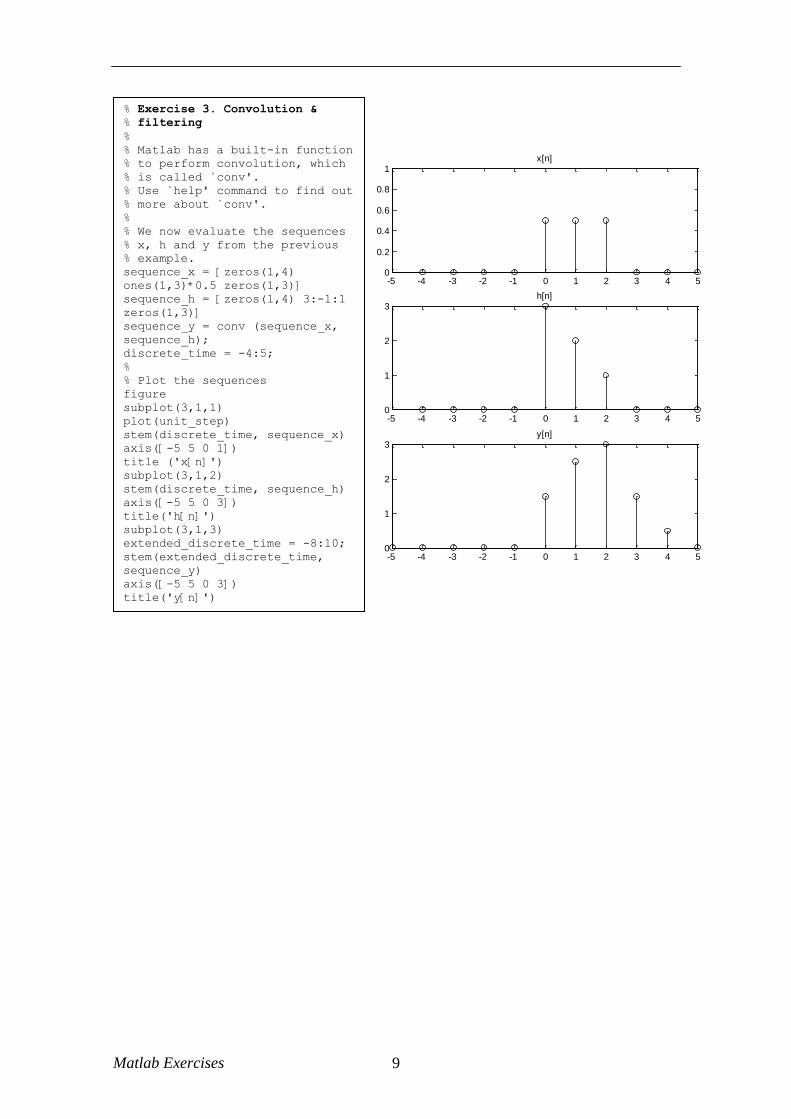
% Exercise 3. Convolution &
% filtering
%
% Matlab has a built-in function
% to perform convolution, which
% is called `conv'.
% Use `help' command to find out
% more about `conv'.
%
% We now evaluate the sequences
% x, h and y from the previous
% example.
sequence_x = [zeros(1,4)
ones(1,3)*0.5 zeros(1,3)]
sequence_h = [zeros(1,4) 3:-1:1
zeros(1,3)]
sequence_y = conv (sequence_x,
sequence_h);
discrete_time = -4:5;
%
% Plot the sequences
figure
subplot(3,1,1)
plot(unit_step)
stem(discrete_time, sequence_x)
axis([-5 5 0 1])
title ('x[n]')
subplot(3,1,2)
stem(discrete_time, sequence_h)
axis([-5 5 0 3])
title('h[n]')
subplot(3,1,3)
extended_discrete_time = -8:10;
stem(extended_discrete_time,
sequence_y)
axis([-5 5 0 3])
title('y[n]')
Matlab Exercises 10
3 Matlab Exercises for Chapter 3
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-5
0
5
10
Normalized Angular Frequency ( rads/sample)
Magnitude (
dB
)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-30
-20
-10
0
Normalized Angular Frequency ( rads/sample)
Phase (
degre
es)
-1 -0.5 0 0.5 1
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Real Part
Imagin
ary
Part
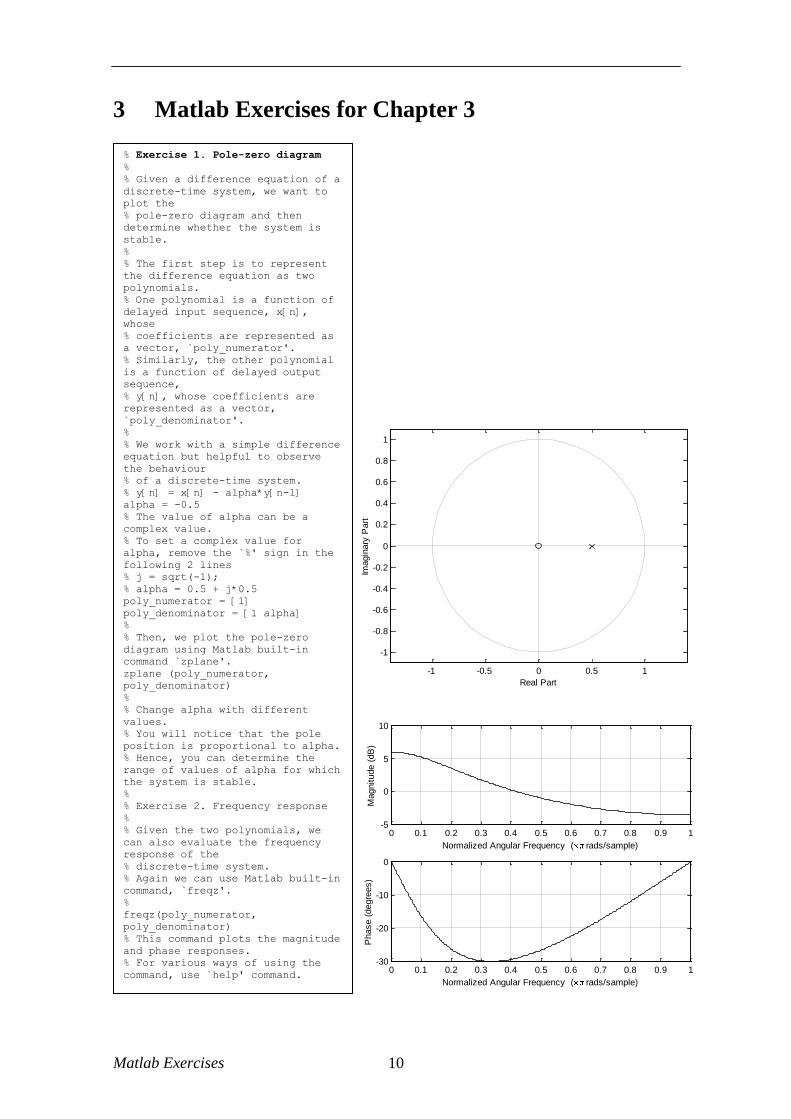
% Exercise 1. Pole-zero diagram
%
% Given a difference equation of a
discrete-time system, we want to
plot the
% pole-zero diagram and then
determine whether the system is
stable.
%
% The first step is to represent
the difference equation as two
polynomials.
% One polynomial is a function of
delayed input sequence, x[n],
whose
% coefficients are represented as
a vector, `poly_numerator'.
% Similarly, the other polynomial
is a function of delayed output
sequence,
% y[n], whose coefficients are
represented as a vector,
`poly_denominator'.
%
% We work with a simple difference
equation but helpful to observe
the behaviour
% of a discrete-time system.
% y[n] = x[n] - alpha*y[n-1]
alpha = -0.5
% The value of alpha can be a
complex value.
% To set a complex value for
alpha, remove the `%' sign in the
following 2 lines
% j = sqrt(-1);
% alpha = 0.5 + j*0.5
poly_numerator = [1]
poly_denominator = [1 alpha]
%
% Then, we plot the pole-zero
diagram using Matlab built-in
command `zplane'.
zplane (poly_numerator,
poly_denominator)
%
% Change alpha with different
values.
% You will notice that the pole
position is proportional to alpha.
% Hence, you can determine the
range of values of alpha for which
the system is stable.
%
% Exercise 2. Frequency response
%
% Given the two polynomials, we
can also evaluate the frequency
response of the
% discrete-time system.
% Again we can use Matlab built-in
command, `freqz'.
%
freqz(poly_numerator,
poly_denominator)
% This command plots the magnitude
and phase responses.
% For various ways of using the
command, use `help' command.
% Change alpha with different
values and observe the impact on
the magnitude response.
Matlab Exercises 11
0 500 1000 1500 2000 2500 3000 3500 4000-40
-20
0
20
40
Frequency (Hz)
Magnitude (
dB
)
0 500 1000 1500 2000 2500 3000 3500 4000-150
-100
-50
0
50
Frequency (Hz)
Phase (
degre
es)
-1 -0.5 0 0.5 1
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Real Part
Imagin
ary
Part
0 5 10 15 20 250
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
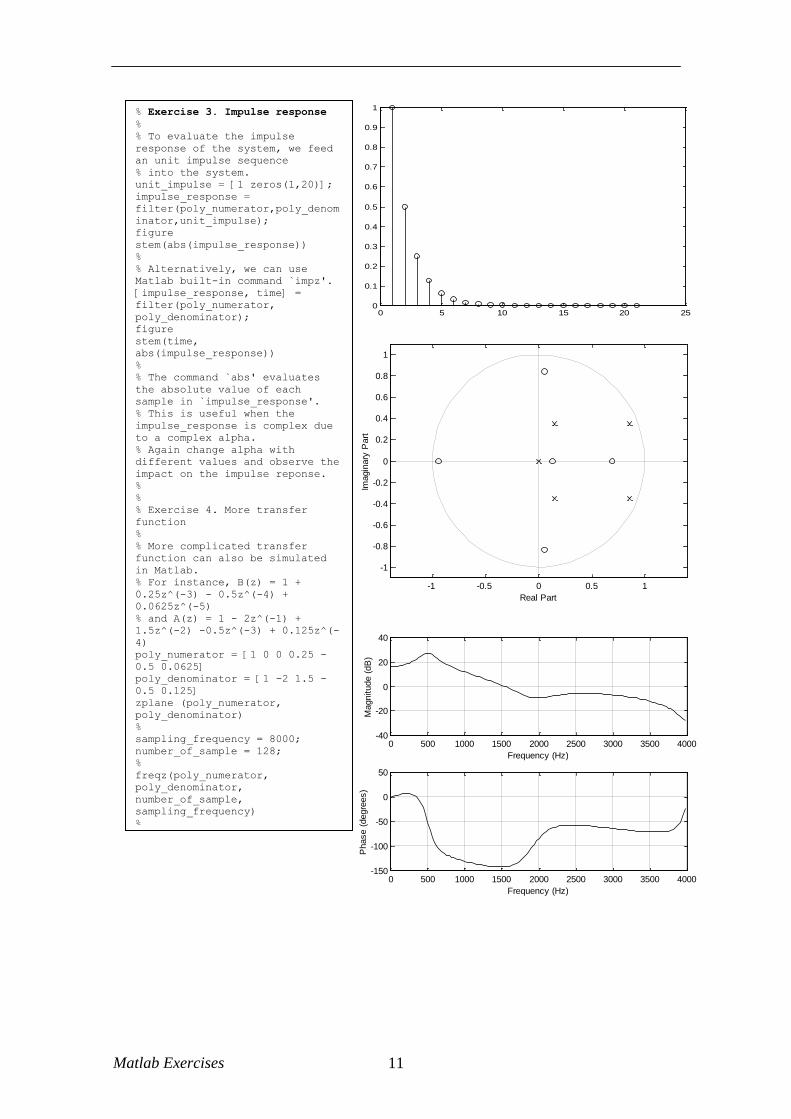
1% Exercise 3. Impulse response
%
% To evaluate the impulse
response of the system, we feed
an unit impulse sequence
% into the system.
unit_impulse = [1 zeros(1,20)];
impulse_response =
filter(poly_numerator,poly_denom
inator,unit_impulse);
figure
stem(abs(impulse_response))
%
% Alternatively, we can use
Matlab built-in command `impz'.
[impulse_response, time] =
filter(poly_numerator,
poly_denominator);
figure
stem(time,
abs(impulse_response))
%
% The command `abs' evaluates
the absolute value of each
sample in `impulse_response'.
% This is useful when the
impulse_response is complex due
to a complex alpha.
% Again change alpha with
different values and observe the
impact on the impulse reponse.
%
%
% Exercise 4. More transfer
function
%
% More complicated transfer
function can also be simulated
in Matlab.
% For instance, B(z) = 1 +
0.25z^(-3) - 0.5z^(-4) +
0.0625z^(-5)
% and A(z) = 1 - 2z^(-1) +
1.5z^(-2) -0.5z^(-3) + 0.125z^(-
4)
poly_numerator = [1 0 0 0.25 -
0.5 0.0625]
poly_denominator = [1 -2 1.5 -
0.5 0.125]
zplane (poly_numerator,
poly_denominator)
%
sampling_frequency = 8000;
number_of_sample = 128;
%
freqz(poly_numerator,
poly_denominator,
number_of_sample,
sampling_frequency)
%
Matlab Exercises 12
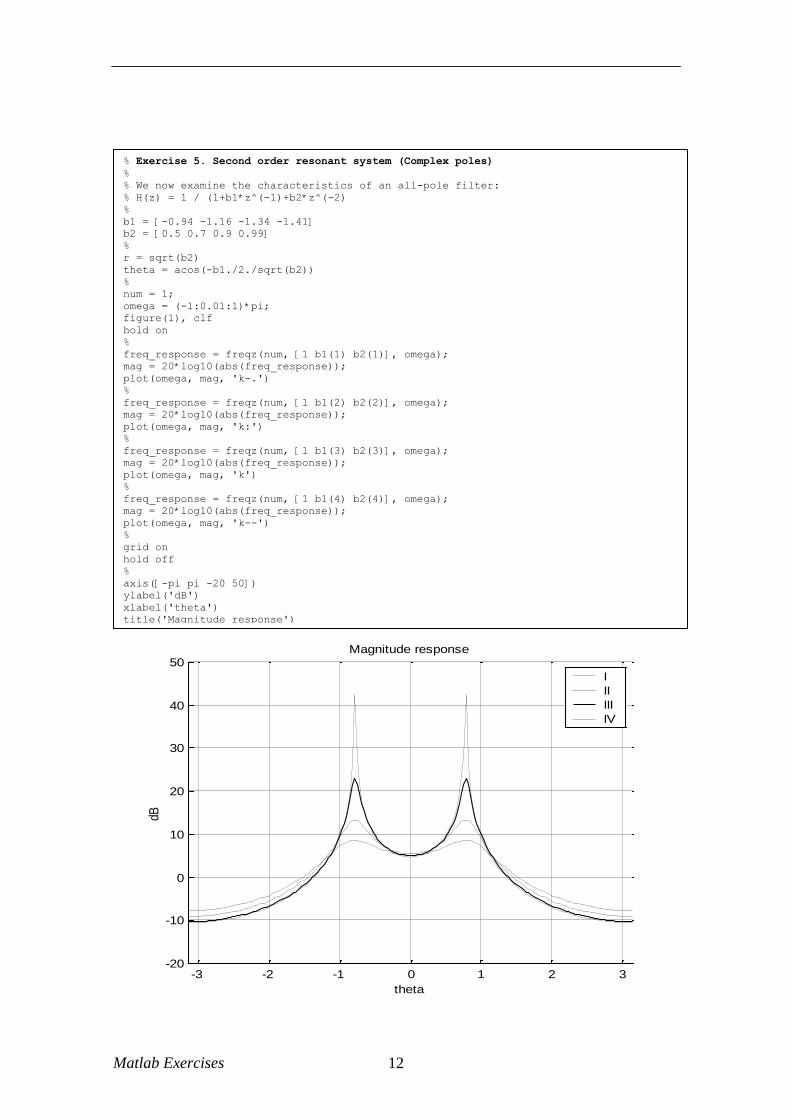
% Exercise 5. Second order resonant system (Complex poles)
%
% We now examine the characteristics of an all-pole filter:
% H(z) = 1 / (1+b1*z^(-1)+b2*z^(-2)
%
b1 = [-0.94 -1.16 -1.34 -1.41]
b2 = [0.5 0.7 0.9 0.99]
%
r = sqrt(b2)
theta = acos(-b1./2./sqrt(b2))
%
num = 1;
omega = (-1:0.01:1)*pi;
figure(1), clf
hold on
%
freq_response = freqz(num, [1 b1(1) b2(1)], omega);
mag = 20*log10(abs(freq_response));
plot(omega, mag, 'k-.')
%
freq_response = freqz(num, [1 b1(2) b2(2)], omega);
mag = 20*log10(abs(freq_response));
plot(omega, mag, 'k:')
%
freq_response = freqz(num, [1 b1(3) b2(3)], omega);
mag = 20*log10(abs(freq_response));
plot(omega, mag, 'k')
%
freq_response = freqz(num, [1 b1(4) b2(4)], omega);
mag = 20*log10(abs(freq_response));
plot(omega, mag, 'k--')
%
grid on
hold off
%
axis([-pi pi -20 50])
ylabel('dB')
xlabel('theta')
title('Magnitude response')
-3 -2 -1 0 1 2 3-20
-10
0
10
20
30
40
50
dB
theta
Magnitude response
I
II
III
IV

Matlab Exercises 13
4 Matlab Exercises for Chapter 4
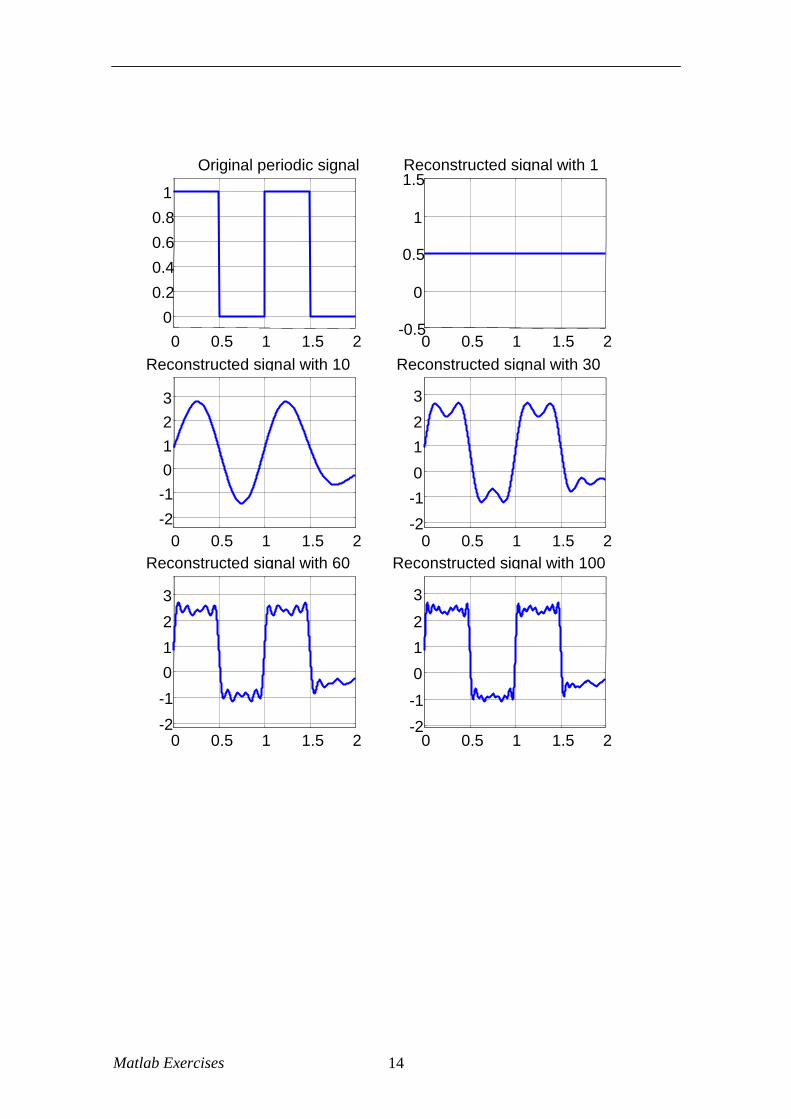
% Exercise 1. Fourier series
%
% We start this exercise by evaluating Fourier series components of a periodic signal.
%
period = 1;
sampling_interval = 0.001;
number_of_wave = 2;
time = 0:sampling_interval:number_of_wave*period-sampling_interval;
signal = [];
for n = 1:number_of_wave
signal = [signal ones(1,period/sampling_interval/2)
zeros(1,period/sampling_interval/2)];
end
figure(1), clf
subplot(2,1,1)
plot(time, signal)
axis([0 number_of_wave*period min(signal)-0.1 max(signal)+0.1])
grid on
title ('Original periodic signal')
%
fundamental_frequency = 1/period % omega_0
%
number_of_coefficients = 100 % n=0,1,2,...
%
coefficient_A = zeros(1,number_of_coefficients);
coefficient_B = zeros(1,number_of_coefficients);
%
for n = 0:number_of_coefficients-1
weight = cos(n*fundamental_frequency*time);
coefficient_A(n+1) = 2/(period*number_of_wave) * sum(signal.*weight) *
sampling_interval;
weight = sin(n*fundamental_frequency*time);
coefficient_B(n+1) = 2/(period*number_of_wave) * sum(signal.*weight) *
sampling_interval;
end
%
%
% Now, we use the Fourier coefficients to reconstruct the original periodic signal
%
reconstruct_signal = zeros(1,length(signal));
reconstruct_signal = reconstruct_signal + coefficient_A(1)/2;
%
number_of_used_coefficients = 30;
for n = 1:number_of_used_coefficients-1
n
reconstruct_signal = reconstruct_signal + ...
coefficient_A(n+1)*cos(n*fundamental_frequency*time) + ...
coefficient_B(n+1)*sin(n*fundamental_frequency*time);
subplot(2,1,2)
plot(time, reconstruct_signal)
axis([0 number_of_wave*period min(reconstruct_signal)-1 max(reconstruct_signal)+1])
grid on
title (['Reconstructed signal with ' num2str(n) ' coefficients'])
pause % press enter/spacebar to continue the loop and ctrl-c to terminate.
% When using a large number of coefficients, you may remove the pause.
end
Matlab Exercises 14
0 0.5 1 1.5 2
0
0.2
0.4
0.6
0.8
1
Original periodic signal
0 0.5 1 1.5 2 -0.5
0
0.5
1
1.5 Reconstructed signal with 1 coefficient
0 0.5 1 1.5 2
-2
-1
0
1
2
3
Reconstructed signal with 10 coefficients
-2
-1
0 0.5 1 1.5 2
0
1
2
3
Reconstructed signal with 30 coefficients
0 0.5 1 1.5 2 -2
-1
0
1
2
3
Reconstructed signal with 60 coefficients
0 0.5 1 1.5 2 -2
-1
0
1
2
3
Reconstructed signal with 100 coefficients
Matlab Exercises 15
5 Matlab Exercises for Chapter 5
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
5
10
15
20
Normalized Angular Frequency ( rads/sample)
Magnitude (
dB
)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-800
-600
-400
-200
0
Normalized Angular Frequency ( rads/sample)
Phase (
degre
es)
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5
-1.5
-1
-0.5
0
0.5
1
1.5
Real Part
Imagin
ary
Part
3
%
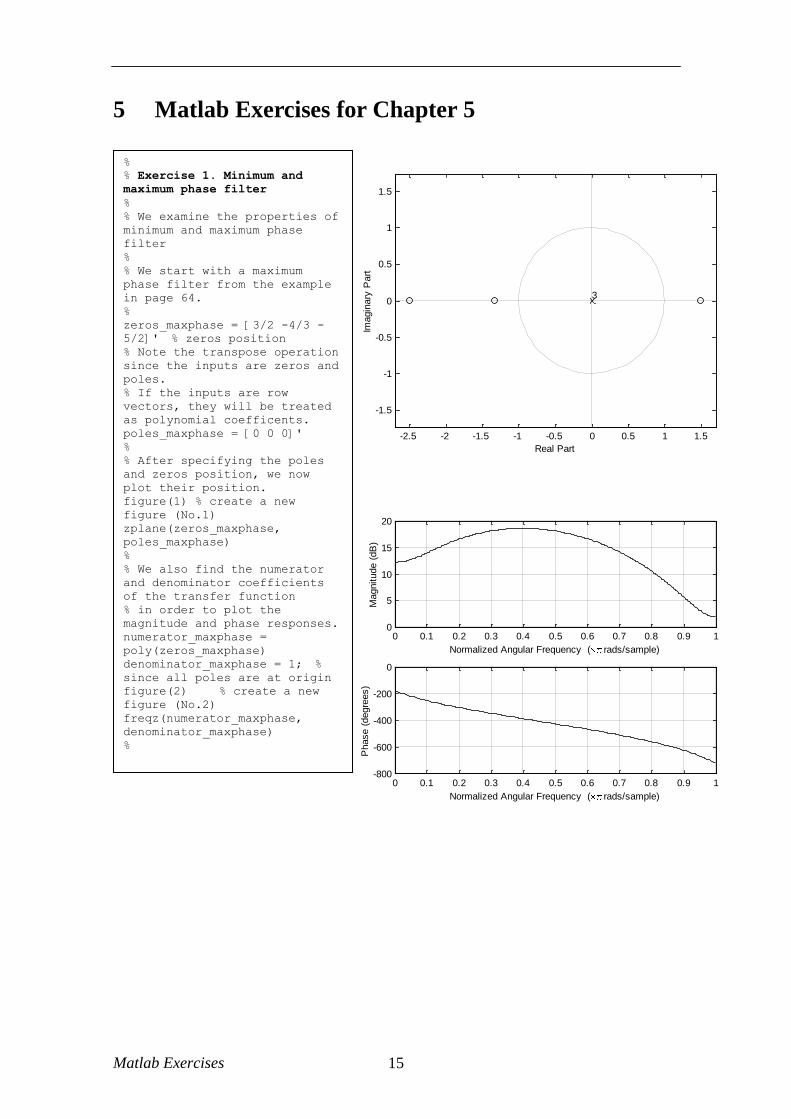
% Exercise 1. Minimum and
maximum phase filter
%
% We examine the properties of
minimum and maximum phase
filter
%
% We start with a maximum
phase filter from the example
in page 64.
%
zeros_maxphase = [3/2 -4/3 -
5/2]' % zeros position
% Note the transpose operation
since the inputs are zeros and
poles.
% If the inputs are row
vectors, they will be treated
as polynomial coefficents.
poles_maxphase = [0 0 0]' % poles are located at origin
%
% After specifying the poles
and zeros position, we now
plot their position.
figure(1) % create a new
figure (No.1)
zplane(zeros_maxphase,
poles_maxphase)
%
% We also find the numerator
and denominator coefficients
of the transfer function
% in order to plot the
magnitude and phase responses.
numerator_maxphase =
poly(zeros_maxphase)
denominator_maxphase = 1; %
since all poles are at origin
figure(2) % create a new
figure (No.2)
freqz(numerator_maxphase,
denominator_maxphase)
%
Matlab Exercises 16
%
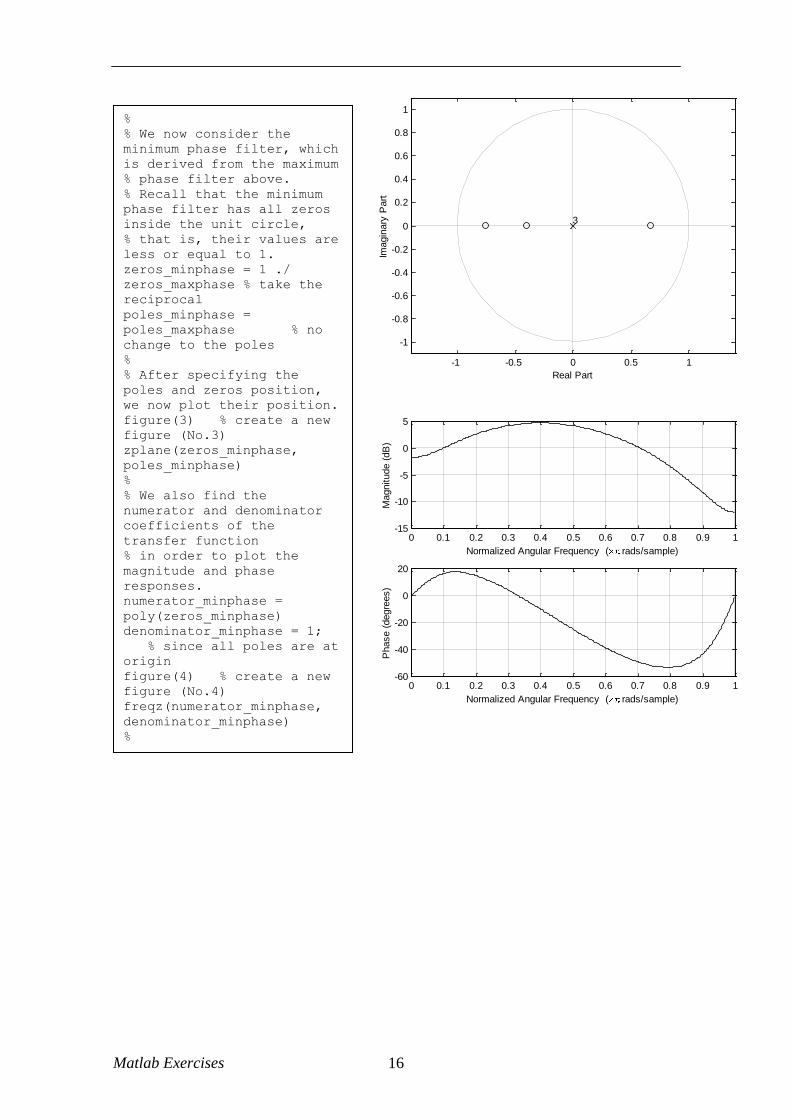
% We now consider the
minimum phase filter, which
is derived from the maximum
% phase filter above.
% Recall that the minimum
phase filter has all zeros
inside the unit circle,
% that is, their values are
less or equal to 1.
zeros_minphase = 1 ./
zeros_maxphase % take the
reciprocal
poles_minphase =
poles_maxphase % no
change to the poles
%
% After specifying the
poles and zeros position,
we now plot their position.
figure(3) % create a new
figure (No.3)
zplane(zeros_minphase,
poles_minphase)
%
% We also find the
numerator and denominator
coefficients of the
transfer function
% in order to plot the
magnitude and phase
responses.
numerator_minphase =
poly(zeros_minphase)
denominator_minphase = 1;
% since all poles are at
origin
figure(4) % create a new
figure (No.4)
freqz(numerator_minphase,
denominator_minphase)
%
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-15
-10
-5
0
5
Normalized Angular Frequency ( rads/sample)
Magnitude (
dB
)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-60
-40
-20
0
20
Normalized Angular Frequency ( rads/sample)
Phase (
degre
es)
-1 -0.5 0 0.5 1
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Real PartIm
agin
ary
Part
3
Matlab Exercises 17
0 10 20 30 40 50 60 70 80 90 100-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
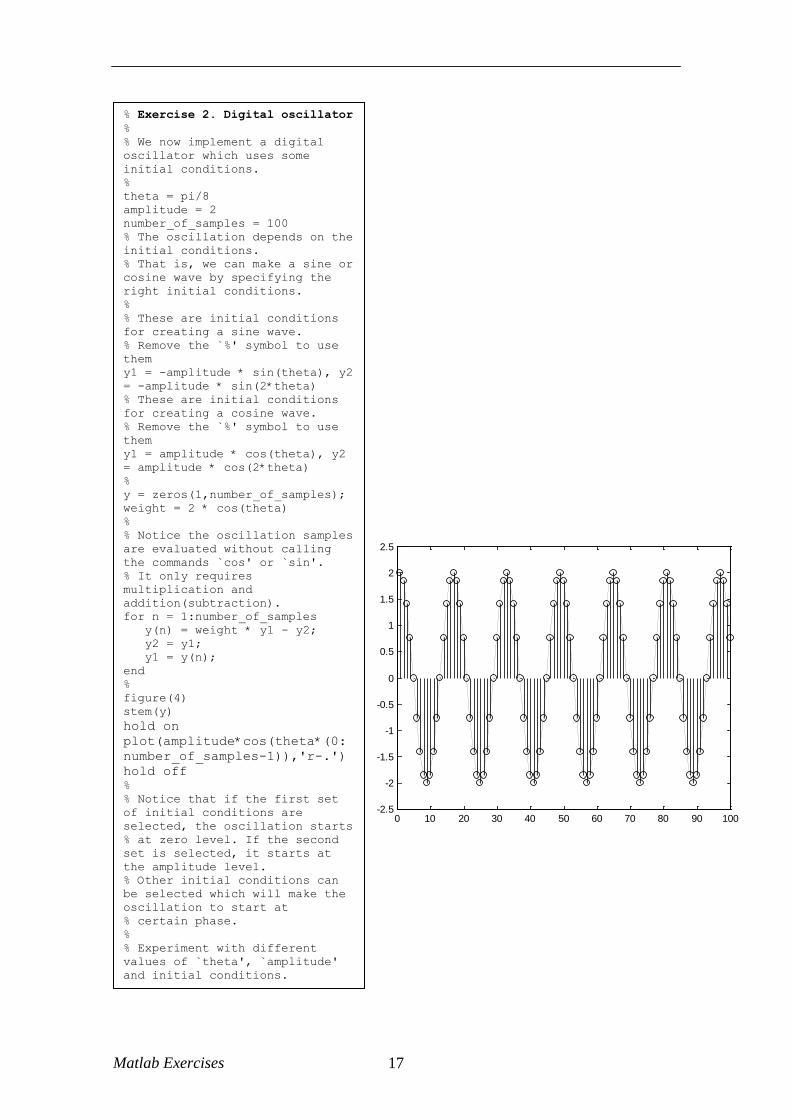
% Exercise 2. Digital oscillator
%
% We now implement a digital
oscillator which uses some
initial conditions.
%
theta = pi/8 % angular frequency of the oscillator
amplitude = 2 % amplitude of the oscillator
number_of_samples = 100
% The oscillation depends on the
initial conditions.
% That is, we can make a sine or
cosine wave by specifying the
right initial conditions.
%
% These are initial conditions
for creating a sine wave.
% Remove the `%' symbol to use
them
y1 = -amplitude * sin(theta), y2
= -amplitude * sin(2*theta)
% These are initial conditions
for creating a cosine wave.
% Remove the `%' symbol to use
them
y1 = amplitude * cos(theta), y2
= amplitude * cos(2*theta)
%
y = zeros(1,number_of_samples); % initializing oscillation samples
weight = 2 * cos(theta)
%
% Notice the oscillation samples
are evaluated without calling
the commands `cos' or `sin'.
% It only requires
multiplication and
addition(subtraction).
for n = 1:number_of_samples
y(n) = weight * y1 - y2;
y2 = y1; % updating previous samples
y1 = y(n);
end
%
figure(4)
stem(y)
hold on
plot(amplitude*cos(theta*(0:
number_of_samples-1)),'r-.')
hold off
%
% Notice that if the first set
of initial conditions are
selected, the oscillation starts
% at zero level. If the second
set is selected, it starts at
the amplitude level.
% Other initial conditions can
be selected which will make the
oscillation to start at
% certain phase.
%
% Experiment with different
values of `theta', `amplitude'
and initial conditions.
%
Matlab Exercises 18
6 Matlab Exercises for Chapter 6
0 10 20 30 40 50 60 70 80 90 100-1
-0.5
0
0.5
1
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 10
10
20
30
40
50
60
Normalized frequency, 1 corresponds to pi
Magnitude
Discrete-time Fourier Transform
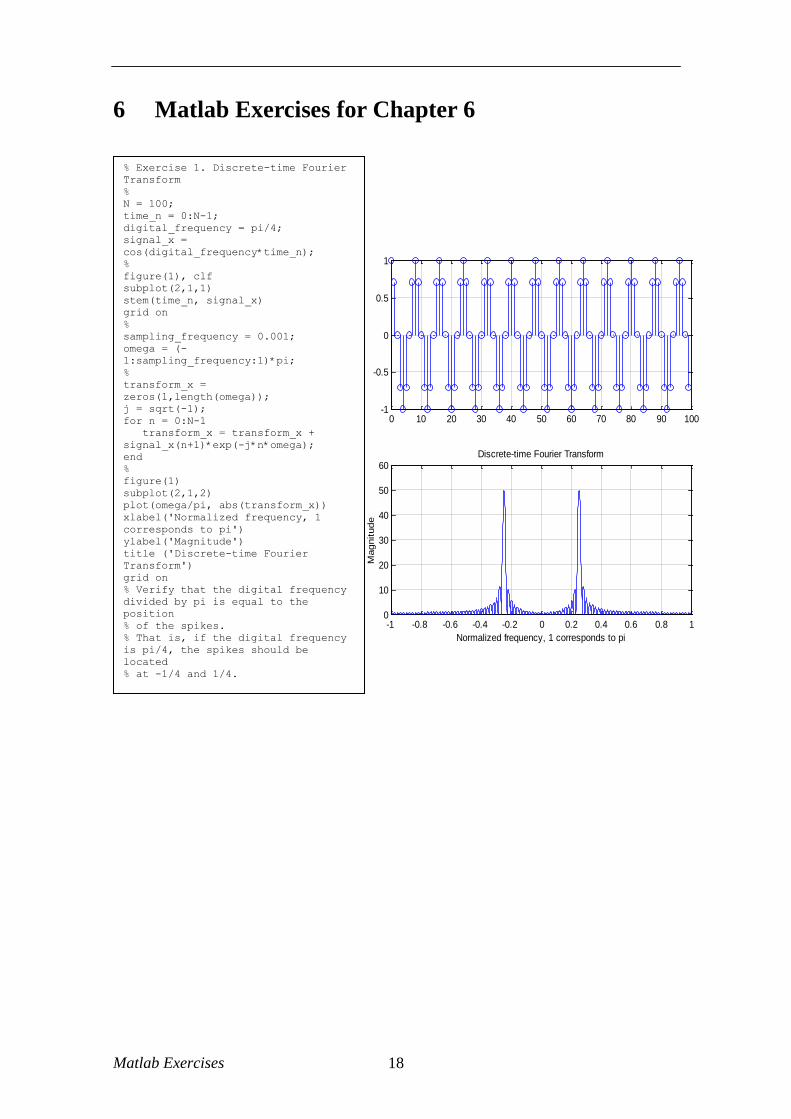
% Exercise 1. Discrete-time Fourier
Transform
%
N = 100;
time_n = 0:N-1;
digital_frequency = pi/4;
signal_x =
cos(digital_frequency*time_n);
%
figure(1), clf
subplot(2,1,1)
stem(time_n, signal_x)
grid on
%
sampling_frequency = 0.001;
omega = (-
1:sampling_frequency:1)*pi;
%
transform_x =
zeros(1,length(omega));
j = sqrt(-1);
for n = 0:N-1
transform_x = transform_x +
signal_x(n+1)*exp(-j*n*omega);
end
%
figure(1)
subplot(2,1,2)
plot(omega/pi, abs(transform_x))
xlabel('Normalized frequency, 1
corresponds to pi')
ylabel('Magnitude')
title ('Discrete-time Fourier
Transform')
grid on
% Verify that the digital frequency
divided by pi is equal to the
position
% of the spikes.
% That is, if the digital frequency
is pi/4, the spikes should be
located
% at -1/4 and 1/4.
Matlab Exercises 19
0 10 20 30 40 50 60 70 80 90 100-1
-0.5
0
0.5
1signal x
0 10 20 30 40 50 60 70 80 90 1000
10
20
30
40Fourier Transform of x
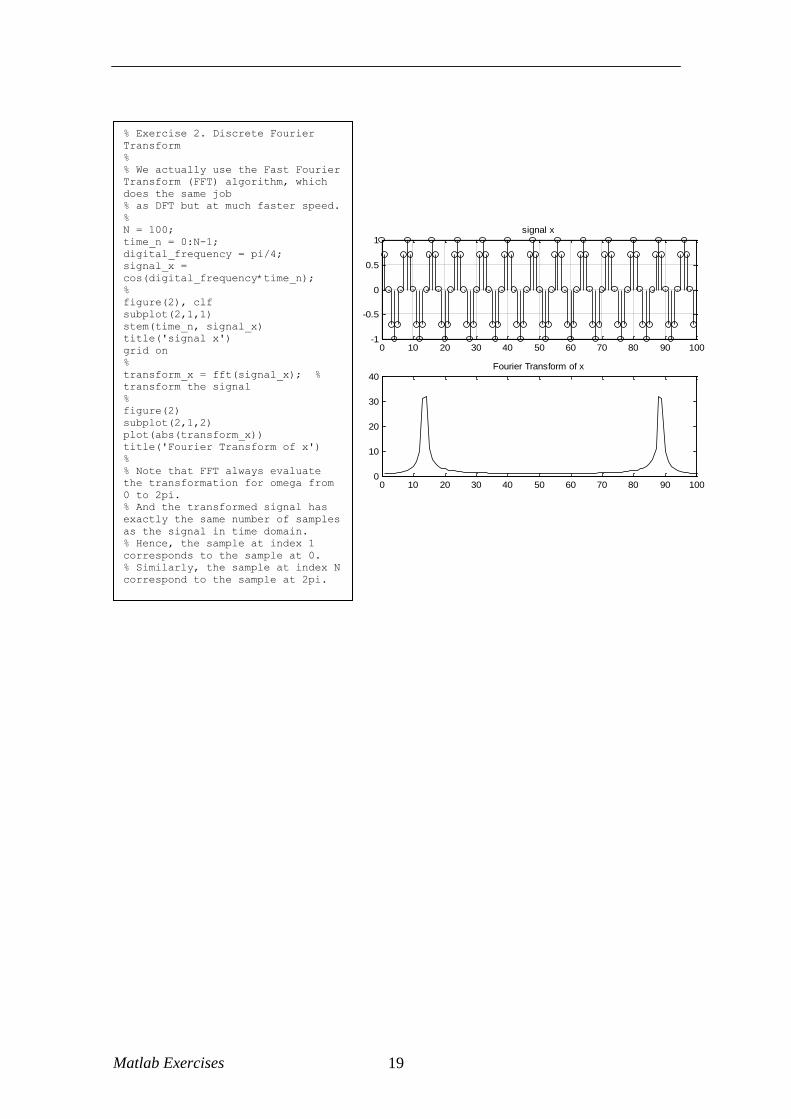
% Exercise 2. Discrete Fourier
Transform
%
% We actually use the Fast Fourier
Transform (FFT) algorithm, which
does the same job
% as DFT but at much faster speed.
%
N = 100;
time_n = 0:N-1;
digital_frequency = pi/4;
signal_x =
cos(digital_frequency*time_n);
%
figure(2), clf
subplot(2,1,1)
stem(time_n, signal_x)
title('signal x')
grid on
%
transform_x = fft(signal_x); %
transform the signal
%
figure(2)
subplot(2,1,2)
plot(abs(transform_x))
title('Fourier Transform of x')
%
% Note that FFT always evaluate
the transformation for omega from
0 to 2pi.
% And the transformed signal has
exactly the same number of samples
as the signal in time domain.
% Hence, the sample at index 1
corresponds to the sample at 0.
% Similarly, the sample at index N
correspond to the sample at 2pi.
Matlab Exercises 20
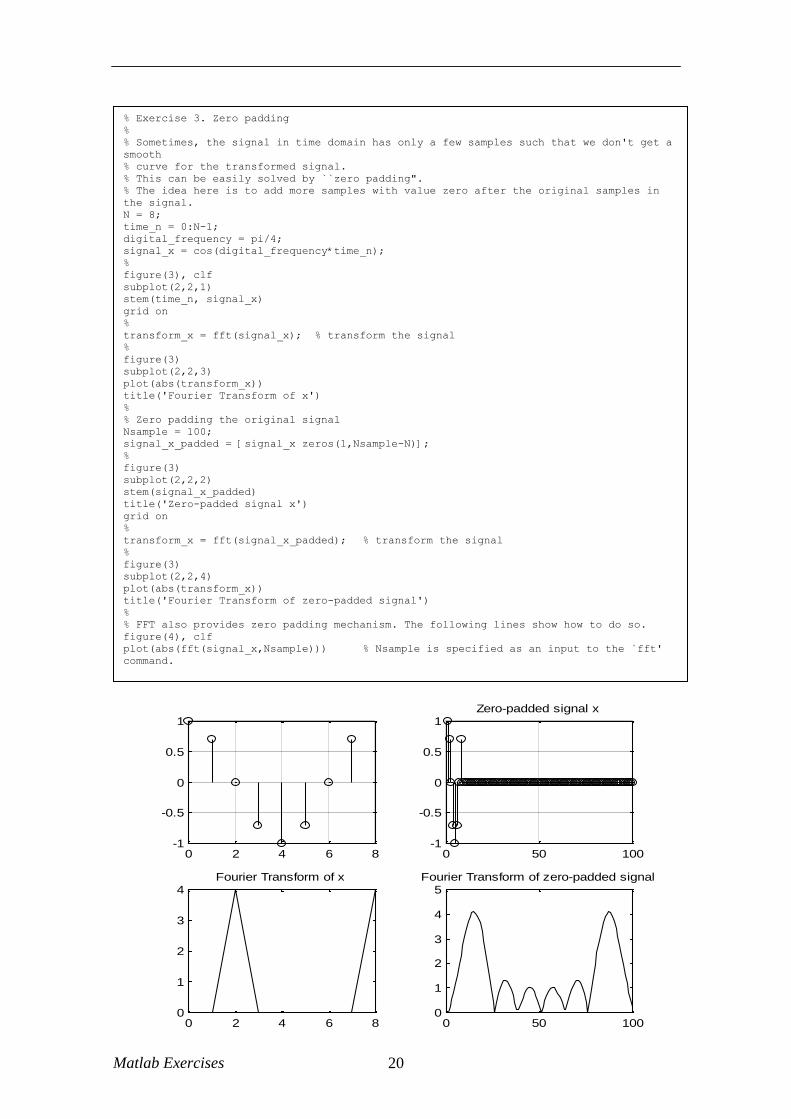
% Exercise 3. Zero padding
%
% Sometimes, the signal in time domain has only a few samples such that we don't get a
smooth
% curve for the transformed signal.
% This can be easily solved by ``zero padding".
% The idea here is to add more samples with value zero after the original samples in
the signal.
N = 8;
time_n = 0:N-1;
digital_frequency = pi/4;
signal_x = cos(digital_frequency*time_n);
%
figure(3), clf
subplot(2,2,1)
stem(time_n, signal_x)
grid on
%
transform_x = fft(signal_x); % transform the signal
%
figure(3)
subplot(2,2,3)
plot(abs(transform_x))
title('Fourier Transform of x')
%
% Zero padding the original signal
Nsample = 100;
signal_x_padded = [signal_x zeros(1,Nsample-N)];
%
figure(3)
subplot(2,2,2)
stem(signal_x_padded)
title('Zero-padded signal x')
grid on
%
transform_x = fft(signal_x_padded); % transform the signal
%
figure(3)
subplot(2,2,4)
plot(abs(transform_x))
title('Fourier Transform of zero-padded signal')
%
% FFT also provides zero padding mechanism. The following lines show how to do so.
figure(4), clf
plot(abs(fft(signal_x,Nsample))) % Nsample is specified as an input to the `fft'
command.
0 2 4 6 8-1
-0.5
0
0.5
1
0 2 4 6 80
1
2
3
4Fourier Transform of x
0 50 100-1
-0.5
0
0.5
1Zero-padded signal x
0 50 1000
1
2
3
4
5Fourier Transform of zero-padded signal

Matlab Exercises 21
7 Matlab Exercises for Chapter 7
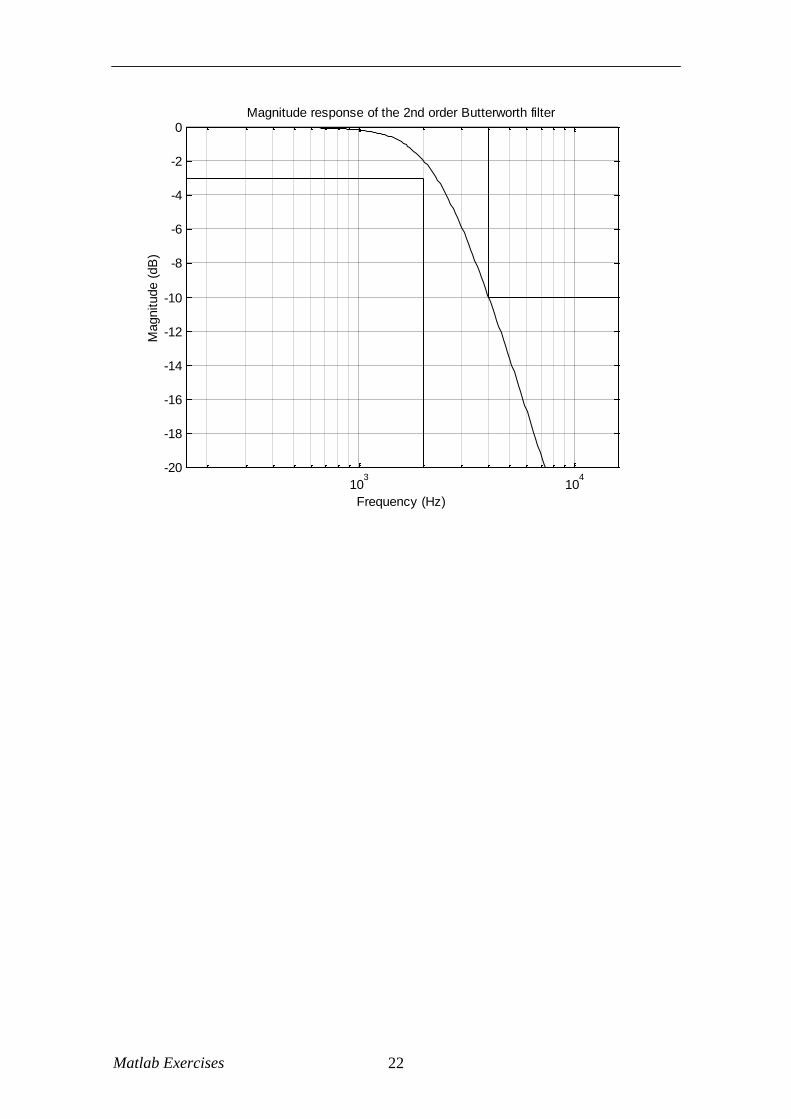
% Exercise 1. Butterworth filter design
%
% There are only two commands required to design a Butterworth filter.
% These commands are provided by Matlab, namely, `buttord' and `butter'.
% `Buttord' evaluates the filter order given the magnitude response
specification.
% `Butter' evaluates the filter coefficients given the order and the cut-
off frequency from `buttord'.
%
% We use the specifications given in Q2 from the problem sheet A4
passband_frequency = 2000 % 3dB cut-off at 2kHz
stopband_frequency = 4000 % transition band is 2 to 4 kHz
stopband_attenuation = 10 % -10dB starting at 4kHz
%
% We first convert the specifications above to the required parameters
passband_angular_frequency = passband_frequency * 2 * pi % in radians
stopband_angular_frequency = stopband_frequency * 2 * pi % in radians
passband_ripple = 3 % 3dB -> the cut-off/natural frequency equals passband
frequency
stopband_ripple = stopband_attenuation
%
% Now, we can evaluate the filter order and the cut-off/natural frequency.
[filter_order, cutoff_frequency] = buttord ...
(passband_angular_frequency, stopband_angular_frequency, ...
passband_ripple, stopband_ripple, 's')
%
% Then, we find the filter coefficients
[numerator, denominator] = butter (filter_order, cutoff_frequency,'s')
% By default, `butter' evaluates the coefficients of a low-pass filter.
% It can also be used to design a high-pass, band-pass or band-stop filter
% by specifying more input parameters. Check out `help butter'.
%
[frequency_response, angular_frequency] = freqs(numerator, denominator);
%
% To check if the filter meets the specifications, we need to plot the
magnitude response.
% Firstly, several conversions are required.
frequency_values = angular_frequency / 2 / pi; % Converting radians to
Hertz
mag_response = 10*log10(frequency_response .* conj(frequency_response)); %
Converting magnitude to dB
% `conj' evaluates the complex conjugate of the input values.
figure(1)
semilogx(frequency_values, mag_response)
title ('Magnitude response of the 2nd order Butterworth filter')
xlabel ('Frequency (Hz)')
ylabel ('Magnitude (dB)')
grid on
%
% Checking against the required specifications.
hold on % to enable several plots on the same area
semilogx([min(frequency_values) passband_frequency], [-passband_ripple -
passband_ripple], 'r') % Plot passband ripple
semilogx([stopband_frequency max(frequency_values)], [-stopband_attenuation
-stopband_attenuation], 'r') % Plot stopband ripple
semilogx([passband_frequency passband_frequency], [-passband_ripple -
stopband_attenuation-10], 'r') % Plot passband frequency
semilogx([stopband_frequency stopband_frequency], [0 -
stopband_attenuation], 'r') % Plot stopband frequency
axis([min(frequency_values) max(frequency_values) -stopband_attenuation-10
0])
hold off
%
% Try designing more filters with different specifications.
% Also try designing high-pass, band-pass filters.
%
Matlab Exercises 22
103
104
-20
-18
-16
-14
-12
-10
-8
-6
-4
-2
0Magnitude response of the 2nd order Butterworth filter
Frequency (Hz)
Magnitude (
dB
)

Matlab Exercises 23
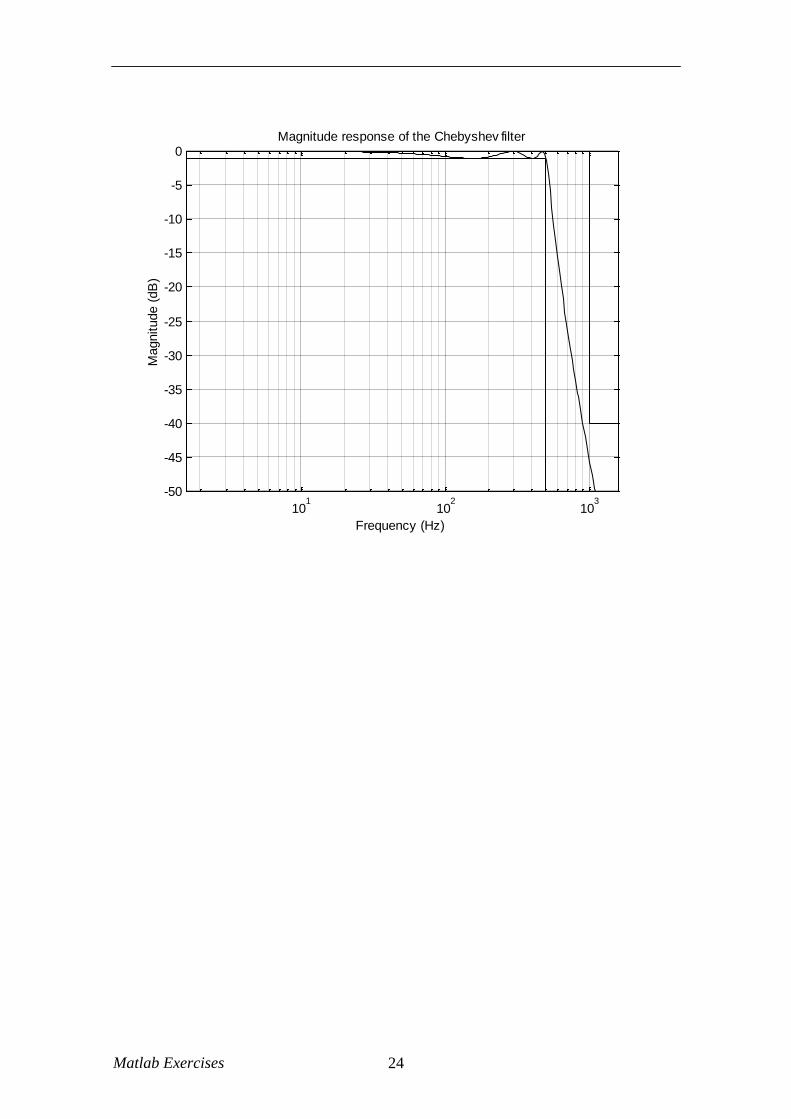
% Exercise 2. Chebyshev filter design
%
% The design process of a Chebyshev filter in Matlab is identical to that
of the
% Butterworth filter.
% Designing a Chebyshev type I filter only requires two commands, namely,
`Cheb1ord' and `Cheby1'.
% `Cheb1ord' evaluates the filter order given the magnitude response
specification.
% `Cheby1' evaluates the filter coefficients given the order and the cut-
off frequency from `Cheb1ord'.
%
% Chebyshev type II filter can be designed in the same way by using
commands
% `Cheb2ord' and `Cheby2'.
%
% We use the specifications given in Q4 from the problem sheet A4
passband_angular_frequency = 1000*pi % cut-off frequency at 1000pi rad/s
stopband_angular_frequency = 2000*pi % stopband frequency at 2000pi rad/s
passband_ripple = 1 % 1dB passband ripple
stopband_attenuation = 40 % 40dB stopband attenuation
%
% Now, we can evaluate the filter order and the cut-off/natural frequency.
[filter_order, cutoff_frequency] = cheb1ord ...
(passband_angular_frequency, stopband_angular_frequency, ...
passband_ripple, stopband_attenuation, 's')
%
% Then, we find the filter coefficients
[numerator, denominator] = cheby1 (filter_order, passband_ripple,
cutoff_frequency,'s')
[frequency_response, angular_frequency] = freqs(numerator, denominator);
%
% To check if the filter meets the specifications, we need to plot the
magnitude response.
% Firstly, several conversions are required.
frequency_values = angular_frequency / 2 / pi; % Converting radians to
Hertz
mag_response = 10*log10(frequency_response .* conj(frequency_response)); %
Converting magnitude to dB
% `conj' evaluates the complex conjugate of the input values.
figure(2)
semilogx(frequency_values, mag_response)
title ('Magnitude response of the Chebyshev filter')
xlabel ('Frequency (Hz)')
ylabel ('Magnitude (dB)')
grid on
%
% Checking against the required specifications.
hold on % to enable several plots on the same area
passband_frequency = passband_angular_frequency / 2 / pi
stopband_frequency = stopband_angular_frequency / 2 / pi
semilogx([min(frequency_values) passband_frequency], [-passband_ripple -
passband_ripple], 'r') % Plot passband ripple
semilogx([stopband_frequency max(frequency_values)], [-stopband_attenuation
-stopband_attenuation], 'r') % Plot stopband ripple
semilogx([passband_frequency passband_frequency], [-passband_ripple -
stopband_attenuation-10], 'r') % Plot passband frequency
semilogx([stopband_frequency stopband_frequency], [0 -
stopband_attenuation], 'r') % Plot stopband frequency
axis([min(frequency_values) max(frequency_values) -stopband_attenuation-10
0])
hold off
%
% Try designing more filters with different specifications.
% Also try designing high-pass, band-pass filters.
Matlab Exercises 24
101
102
103
-50
-45
-40
-35
-30
-25
-20
-15
-10
-5
0Magnitude response of the Chebyshev filter
Frequency (Hz)
Magnitude (
dB
)
Matlab Exercises 25
8 Matlab Exercises for Chapter 8
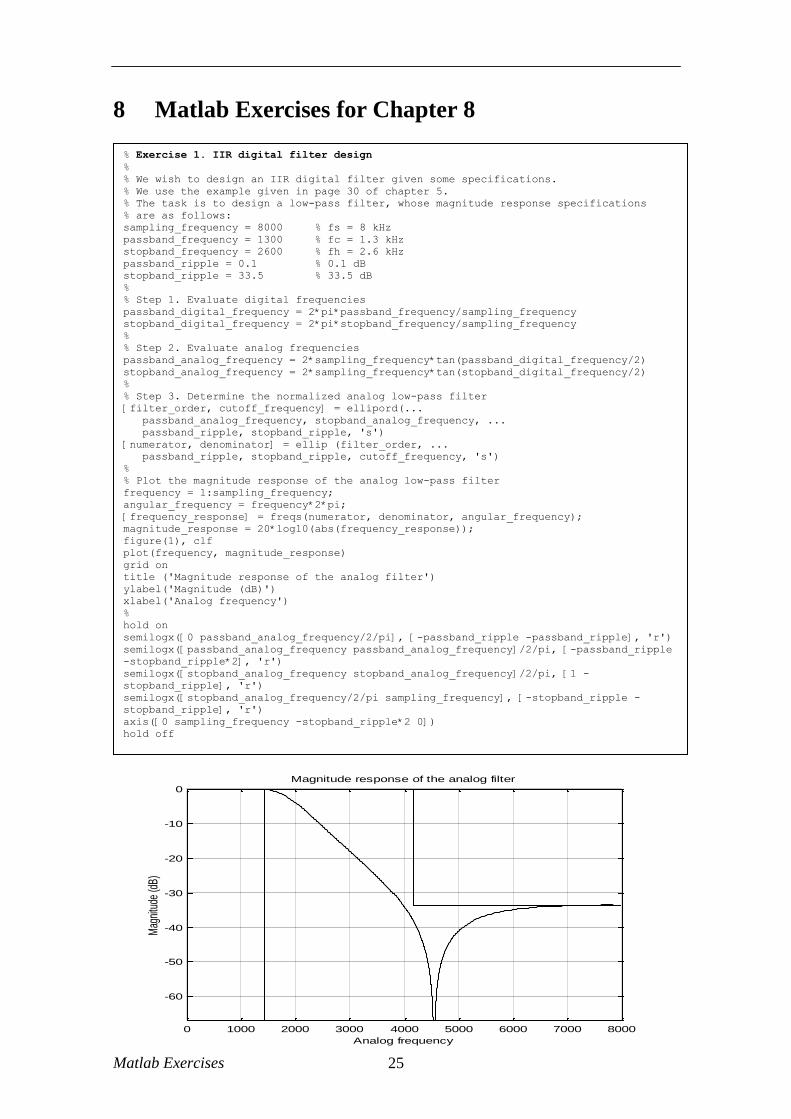
% Exercise 1. IIR digital filter design
%
% We wish to design an IIR digital filter given some specifications.
% We use the example given in page 30 of chapter 5.
% The task is to design a low-pass filter, whose magnitude response specifications
% are as follows:
sampling_frequency = 8000 % fs = 8 kHz
passband_frequency = 1300 % fc = 1.3 kHz
stopband_frequency = 2600 % fh = 2.6 kHz
passband_ripple = 0.1 % 0.1 dB
stopband_ripple = 33.5 % 33.5 dB
%
% Step 1. Evaluate digital frequencies
passband_digital_frequency = 2*pi*passband_frequency/sampling_frequency
stopband_digital_frequency = 2*pi*stopband_frequency/sampling_frequency
%
% Step 2. Evaluate analog frequencies
passband_analog_frequency = 2*sampling_frequency*tan(passband_digital_frequency/2)
stopband_analog_frequency = 2*sampling_frequency*tan(stopband_digital_frequency/2)
%
% Step 3. Determine the normalized analog low-pass filter
[filter_order, cutoff_frequency] = ellipord(...
passband_analog_frequency, stopband_analog_frequency, ...
passband_ripple, stopband_ripple, 's')
[numerator, denominator] = ellip (filter_order, ...
passband_ripple, stopband_ripple, cutoff_frequency, 's')
%
% Plot the magnitude response of the analog low-pass filter
frequency = 1:sampling_frequency;
angular_frequency = frequency*2*pi;
[frequency_response] = freqs(numerator, denominator, angular_frequency);
magnitude_response = 20*log10(abs(frequency_response));
figure(1), clf
plot(frequency, magnitude_response)
grid on
title ('Magnitude response of the analog filter')
ylabel('Magnitude (dB)')
xlabel('Analog frequency')
%
hold on
semilogx([0 passband_analog_frequency/2/pi], [-passband_ripple -passband_ripple], 'r')
semilogx([passband_analog_frequency passband_analog_frequency]/2/pi, [-passband_ripple
-stopband_ripple*2], 'r')
semilogx([stopband_analog_frequency stopband_analog_frequency]/2/pi, [1 -
stopband_ripple], 'r')
semilogx([stopband_analog_frequency/2/pi sampling_frequency], [-stopband_ripple -
stopband_ripple], 'r')
axis([0 sampling_frequency -stopband_ripple*2 0])
hold off
0 1000 2000 3000 4000 5000 6000 7000 8000
-60
-50
-40
-30
-20
-10
0Magnitude response of the analog filter
Mag
nitu
de (d
B)
Analog frequency
Matlab Exercises 26
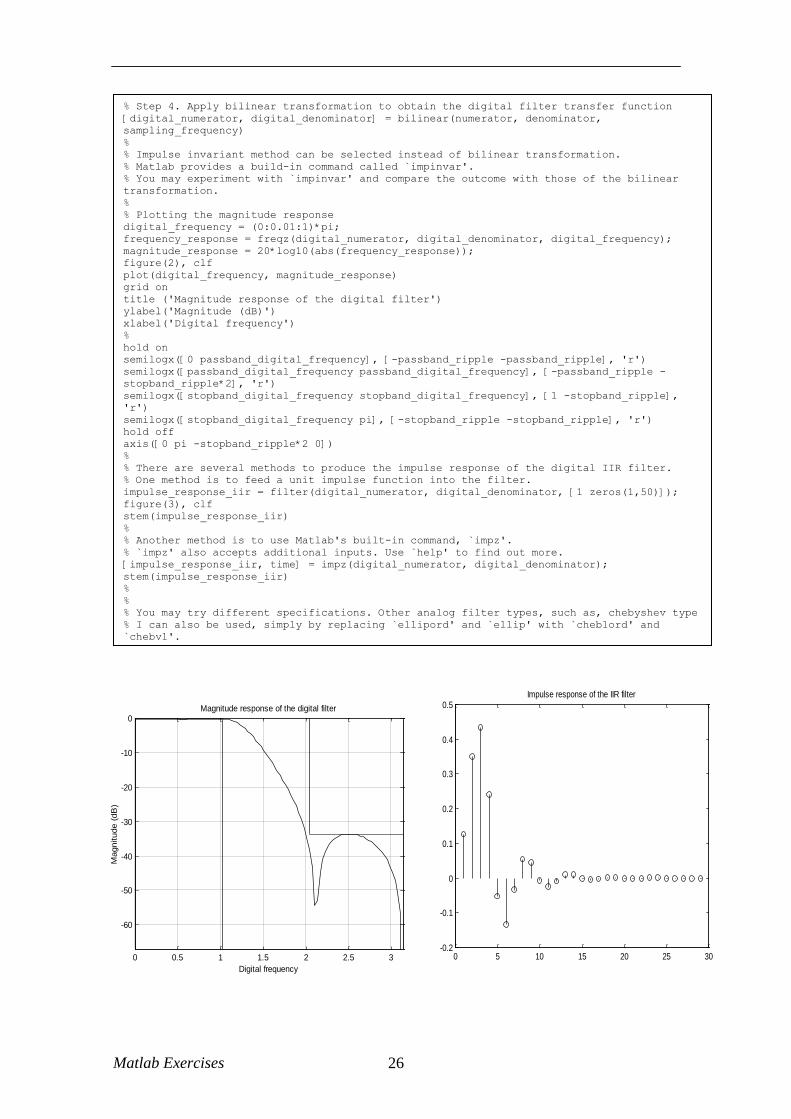
% Step 4. Apply bilinear transformation to obtain the digital filter transfer function
[digital_numerator, digital_denominator] = bilinear(numerator, denominator,
sampling_frequency)
%
% Impulse invariant method can be selected instead of bilinear transformation.
% Matlab provides a build-in command called `impinvar'.
% You may experiment with `impinvar' and compare the outcome with those of the bilinear
transformation.
%
% Plotting the magnitude response
digital_frequency = (0:0.01:1)*pi;
frequency_response = freqz(digital_numerator, digital_denominator, digital_frequency);
magnitude_response = 20*log10(abs(frequency_response));
figure(2), clf
plot(digital_frequency, magnitude_response)
grid on
title ('Magnitude response of the digital filter')
ylabel('Magnitude (dB)')
xlabel('Digital frequency')
%
hold on
semilogx([0 passband_digital_frequency], [-passband_ripple -passband_ripple], 'r')
semilogx([passband_digital_frequency passband_digital_frequency], [-passband_ripple -
stopband_ripple*2], 'r')
semilogx([stopband_digital_frequency stopband_digital_frequency], [1 -stopband_ripple],
'r')
semilogx([stopband_digital_frequency pi], [-stopband_ripple -stopband_ripple], 'r')
hold off
axis([0 pi -stopband_ripple*2 0])
%
% There are several methods to produce the impulse response of the digital IIR filter.
% One method is to feed a unit impulse function into the filter.
impulse_response_iir = filter(digital_numerator, digital_denominator, [1 zeros(1,50)]);
figure(3), clf
stem(impulse_response_iir)
%
% Another method is to use Matlab's built-in command, `impz'.
% `impz' also accepts additional inputs. Use `help' to find out more.
[impulse_response_iir, time] = impz(digital_numerator, digital_denominator);
stem(impulse_response_iir)
%
%
% You may try different specifications. Other analog filter types, such as, chebyshev type
% I can also be used, simply by replacing `ellipord' and `ellip' with `cheb1ord' and
`cheby1'.
0 0.5 1 1.5 2 2.5 3
-60
-50
-40
-30
-20
-10
0Magnitude response of the digital filter
Magnitude (
dB
)
Digital frequency
0 5 10 15 20 25 30-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5Impulse response of the IIR filter
Matlab Exercises 27
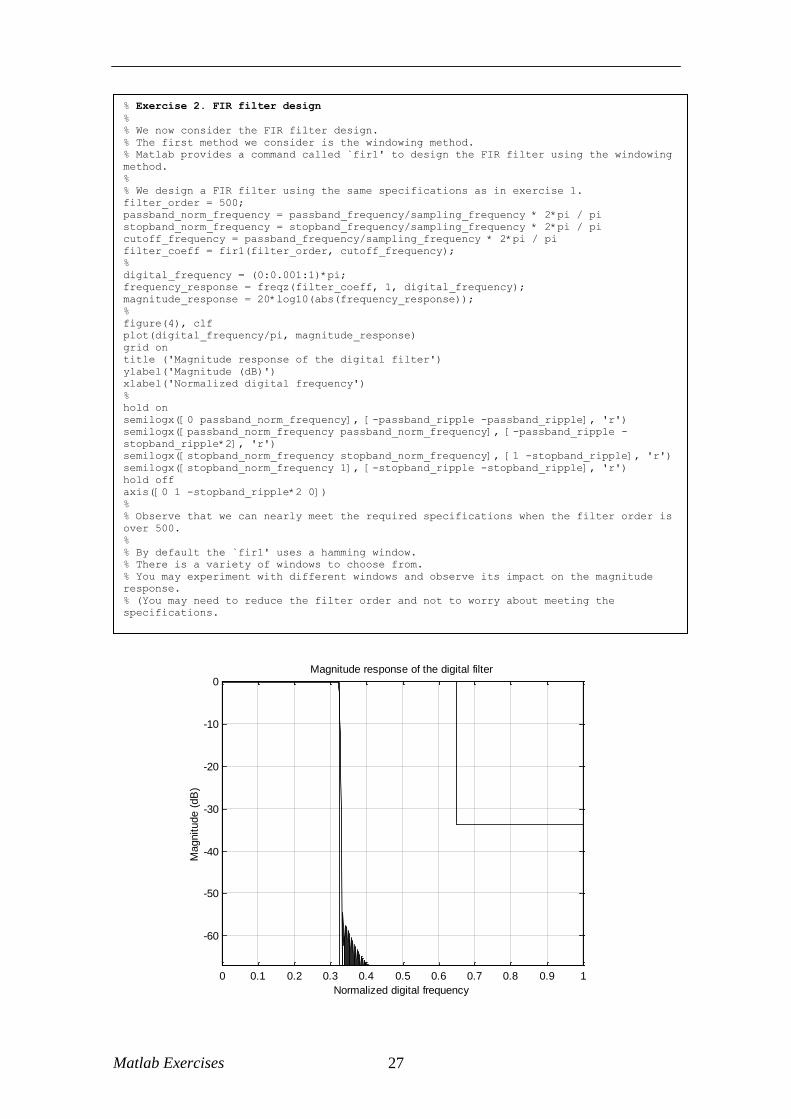
% Exercise 2. FIR filter design
%
% We now consider the FIR filter design.
% The first method we consider is the windowing method.
% Matlab provides a command called `fir1' to design the FIR filter using the windowing
method.
%
% We design a FIR filter using the same specifications as in exercise 1.
filter_order = 500;
passband_norm_frequency = passband_frequency/sampling_frequency * 2*pi / pi
stopband_norm_frequency = stopband_frequency/sampling_frequency * 2*pi / pi
cutoff_frequency = passband_frequency/sampling_frequency * 2*pi / pi
filter_coeff = fir1(filter_order, cutoff_frequency);
%
digital_frequency = (0:0.001:1)*pi;
frequency_response = freqz(filter_coeff, 1, digital_frequency);
magnitude_response = 20*log10(abs(frequency_response));
%
figure(4), clf
plot(digital_frequency/pi, magnitude_response)
grid on
title ('Magnitude response of the digital filter')
ylabel('Magnitude (dB)')
xlabel('Normalized digital frequency')
%
hold on
semilogx([0 passband_norm_frequency], [-passband_ripple -passband_ripple], 'r')
semilogx([passband_norm_frequency passband_norm_frequency], [-passband_ripple -
stopband_ripple*2], 'r')
semilogx([stopband_norm_frequency stopband_norm_frequency], [1 -stopband_ripple], 'r')
semilogx([stopband_norm_frequency 1], [-stopband_ripple -stopband_ripple], 'r')
hold off
axis([0 1 -stopband_ripple*2 0])
%
% Observe that we can nearly meet the required specifications when the filter order is
over 500.
%
% By default the `fir1' uses a hamming window.
% There is a variety of windows to choose from.
% You may experiment with different windows and observe its impact on the magnitude
response.
% (You may need to reduce the filter order and not to worry about meeting the
specifications.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-60
-50
-40
-30
-20
-10
0Magnitude response of the digital filter
Magnitude (
dB
)
Normalized digital frequency
Matlab Exercises 28
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-60
-50
-40
-30
-20
-10
0Magnitude response of the digital filter
Magnitude (
dB
)
Normalized digital frequency
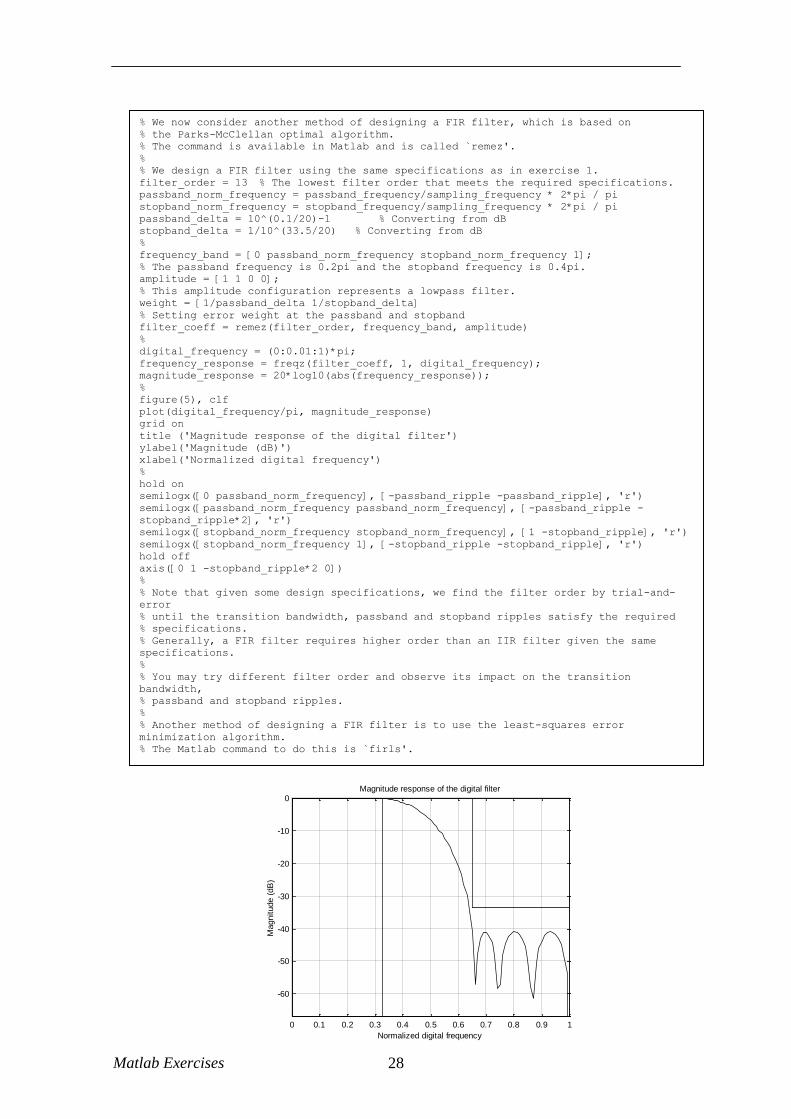
% We now consider another method of designing a FIR filter, which is based on
% the Parks-McClellan optimal algorithm.
% The command is available in Matlab and is called `remez'.
%
% We design a FIR filter using the same specifications as in exercise 1.
filter_order = 13 % The lowest filter order that meets the required specifications.
passband_norm_frequency = passband_frequency/sampling_frequency * 2*pi / pi
stopband_norm_frequency = stopband_frequency/sampling_frequency * 2*pi / pi
passband_delta = 10^(0.1/20)-1 % Converting from dB
stopband_delta = 1/10^(33.5/20) % Converting from dB
%
frequency_band = [0 passband_norm_frequency stopband_norm_frequency 1];
% The passband frequency is 0.2pi and the stopband frequency is 0.4pi.
amplitude = [1 1 0 0];
% This amplitude configuration represents a lowpass filter.
weight = [1/passband_delta 1/stopband_delta]
% Setting error weight at the passband and stopband
filter_coeff = remez(filter_order, frequency_band, amplitude)
%
digital_frequency = (0:0.01:1)*pi;
frequency_response = freqz(filter_coeff, 1, digital_frequency);
magnitude_response = 20*log10(abs(frequency_response));
%
figure(5), clf
plot(digital_frequency/pi, magnitude_response)
grid on
title ('Magnitude response of the digital filter')
ylabel('Magnitude (dB)')
xlabel('Normalized digital frequency')
%
hold on
semilogx([0 passband_norm_frequency], [-passband_ripple -passband_ripple], 'r')
semilogx([passband_norm_frequency passband_norm_frequency], [-passband_ripple -
stopband_ripple*2], 'r')
semilogx([stopband_norm_frequency stopband_norm_frequency], [1 -stopband_ripple], 'r')
semilogx([stopband_norm_frequency 1], [-stopband_ripple -stopband_ripple], 'r')
hold off
axis([0 1 -stopband_ripple*2 0])
%
% Note that given some design specifications, we find the filter order by trial-and-
error
% until the transition bandwidth, passband and stopband ripples satisfy the required
% specifications.
% Generally, a FIR filter requires higher order than an IIR filter given the same
specifications.
%
% You may try different filter order and observe its impact on the transition
bandwidth,
% passband and stopband ripples.
%
% Another method of designing a FIR filter is to use the least-squares error
minimization algorithm.
% The Matlab command to do this is `firls'.
Matlab Exercises 29
9 Matlab Exercises for Chapter 9
0 2 4 6 8 10 12 14 16 18 200
5
10
15
20
1 2 3 4 5 6 7 8 9 100
5
10
15
20Downsampled signal
0 2 4 6 8 10 12 14 16 18 200
5
10
15
20Upsampled signal
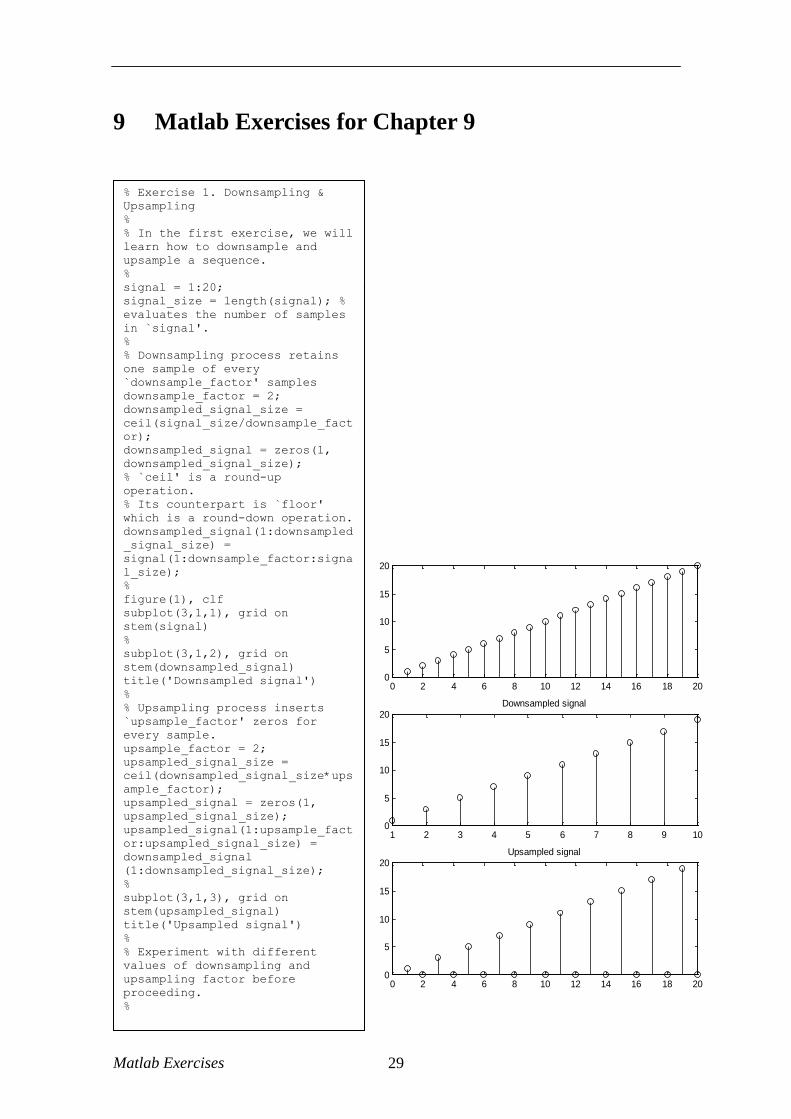
% Exercise 1. Downsampling &
Upsampling
%
% In the first exercise, we will
learn how to downsample and
upsample a sequence.
%
signal = 1:20; % an arbitrary test signal
signal_size = length(signal); %
evaluates the number of samples
in `signal'.
%
% Downsampling process retains
one sample of every
`downsample_factor' samples
downsample_factor = 2;
downsampled_signal_size =
ceil(signal_size/downsample_fact
or);
downsampled_signal = zeros(1,
downsampled_signal_size);
% `ceil' is a round-up
operation.
% Its counterpart is `floor'
which is a round-down operation.
downsampled_signal(1:downsampled
_signal_size) =
signal(1:downsample_factor:signa
l_size);
%
figure(1), clf
subplot(3,1,1), grid on
stem(signal)
%
subplot(3,1,2), grid on
stem(downsampled_signal)
title('Downsampled signal')
%
% Upsampling process inserts
`upsample_factor' zeros for
every sample.
upsample_factor = 2;
upsampled_signal_size =
ceil(downsampled_signal_size*ups
ample_factor);
upsampled_signal = zeros(1,
upsampled_signal_size);
upsampled_signal(1:upsample_fact
or:upsampled_signal_size) =
downsampled_signal
(1:downsampled_signal_size);
%
subplot(3,1,3), grid on
stem(upsampled_signal)
title('Upsampled signal')
%
% Experiment with different
values of downsampling and
upsampling factor before
proceeding.
%
Matlab Exercises 30
0 5 10 15 20 25 30 35 400
5
10
0 20 40 60 80 100 1200
5
10Upsampled signal
0 20 40 60 80 100 1200
5
10Filtered signal
0 2 4 6 8 10 12 14 16 180
5
10Downsampled signal
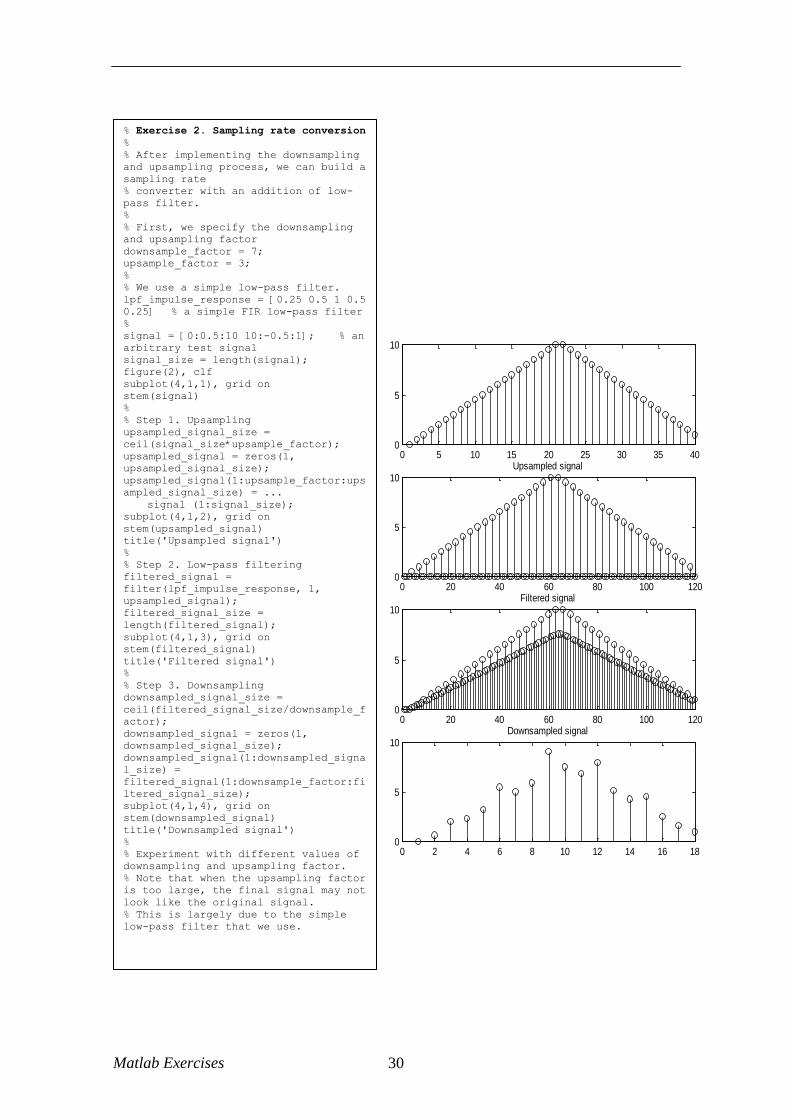
% Exercise 2. Sampling rate conversion
%
% After implementing the downsampling
and upsampling process, we can build a
sampling rate
% converter with an addition of low-
pass filter.
%
% First, we specify the downsampling
and upsampling factor
downsample_factor = 7;
upsample_factor = 3;
%
% We use a simple low-pass filter.
lpf_impulse_response = [0.25 0.5 1 0.5
0.25] % a simple FIR low-pass filter
%
signal = [0:0.5:10 10:-0.5:1]; % an
arbitrary test signal
signal_size = length(signal);
figure(2), clf
subplot(4,1,1), grid on
stem(signal)
%
% Step 1. Upsampling
upsampled_signal_size =
ceil(signal_size*upsample_factor);
upsampled_signal = zeros(1,
upsampled_signal_size);
upsampled_signal(1:upsample_factor:ups
ampled_signal_size) = ...
signal (1:signal_size);
subplot(4,1,2), grid on
stem(upsampled_signal)
title('Upsampled signal')
%
% Step 2. Low-pass filtering
filtered_signal =
filter(lpf_impulse_response, 1,
upsampled_signal);
filtered_signal_size =
length(filtered_signal);
subplot(4,1,3), grid on
stem(filtered_signal)
title('Filtered signal')
%
% Step 3. Downsampling
downsampled_signal_size =
ceil(filtered_signal_size/downsample_f
actor);
downsampled_signal = zeros(1,
downsampled_signal_size);
downsampled_signal(1:downsampled_signa
l_size) =
filtered_signal(1:downsample_factor:fi
ltered_signal_size);
subplot(4,1,4), grid on
stem(downsampled_signal)
title('Downsampled signal')
%
% Experiment with different values of
downsampling and upsampling factor.
% Note that when the upsampling factor
is too large, the final signal may not
look like the original signal.
% This is largely due to the simple
low-pass filter that we use.